Does Information on Automated Driving Functions and the Way of Presenting It before Activation Influence Users’ Behavior and Perception of the System?

Abstract
:1. Introduction
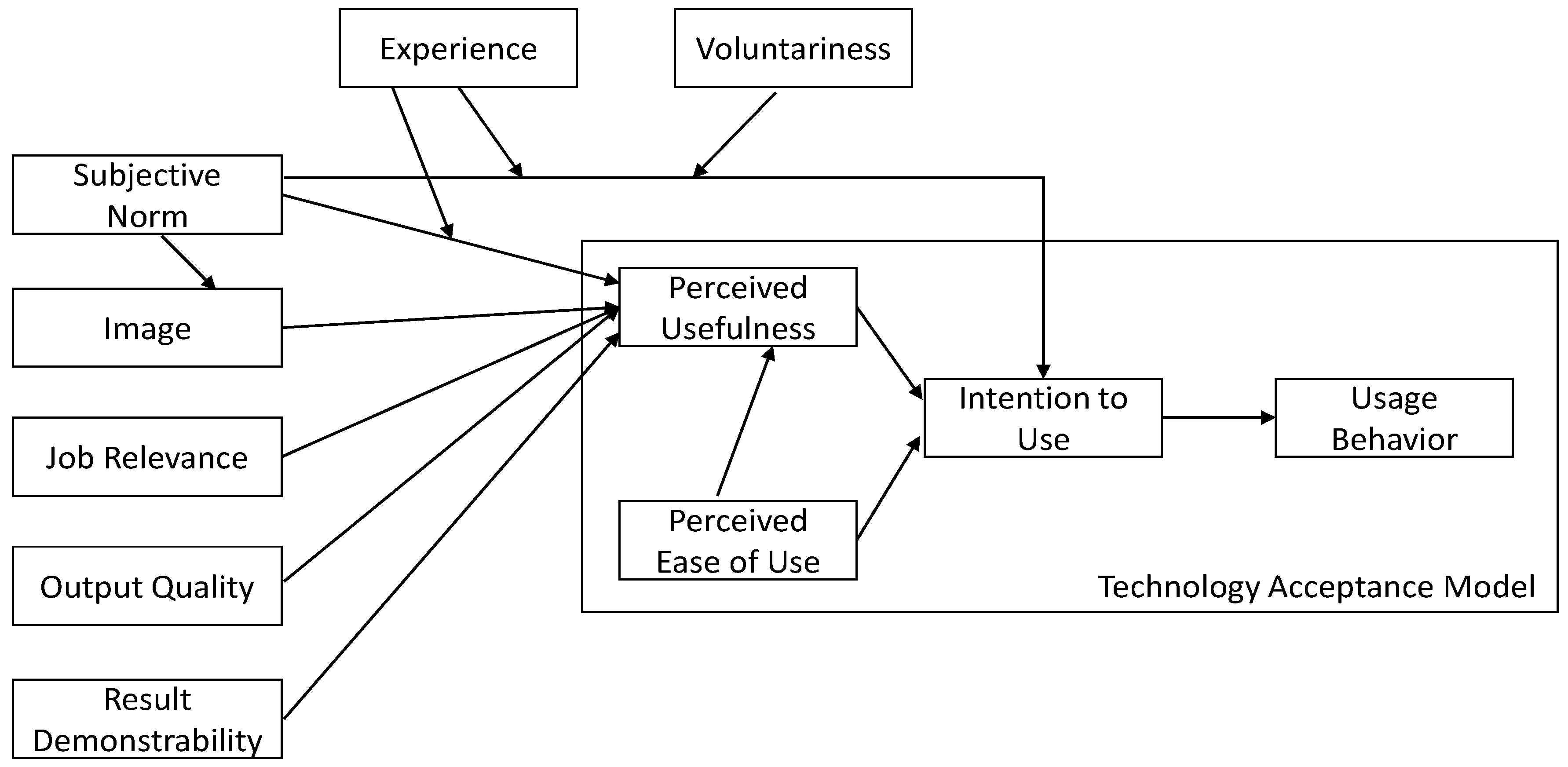
1.1. Theoretical Background
1.2. Related Work
1.3. Availability Duration Displayed before Activation
1.4. The Way of Presenting the Information
1.5. Research Questions and Hypotheses
2. Materials and Methods
2.1. Preliminary Study: Design Thinking Workshop
2.2. Study Design and Procedure
2.3. Driving Simulator and Simulated Routes
2.4. Human–Machine Interface
2.5. Dependent Variables
2.6. Participants
2.7. Statistical Analysis
2.8. Ethical Approval
3. Results
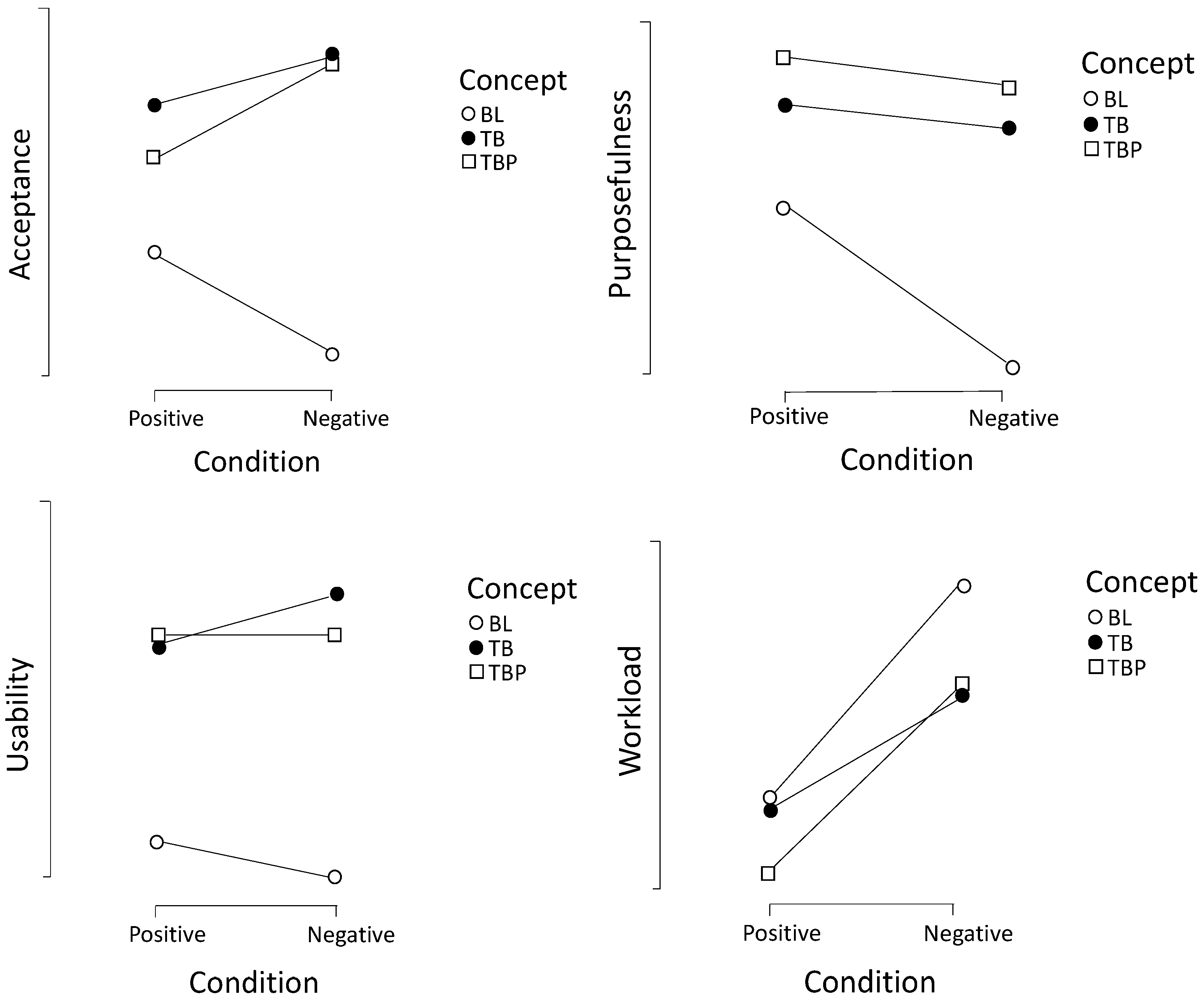
3.1. H1—Effects on Acceptance
3.2. H2—Effects on Usability
3.3. H3—Effects on Workload
3.4. H4—Effects on Purposefulness of Activation Behavior
3.5. Qualitative Interview
4. Discussion
4.1. Displaying the Availability Duration before Activation
4.2. The Manner of Providing Information
4.3. Further Limitations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- SAE Internation. J3016: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2018. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 17 January 2020).
- Lu, Z.; Happee, R.; Cabrall, C.D.D.; Kyriakidis, M.; de Winter, J.C.F. Human factors of transitions in automated driving: A general framework and literature survey. Trans. Res. Part F Traffic Psychol. Behav. 2016, 43, 183–198. [Google Scholar] [CrossRef] [Green Version]
- Holländer, K.; Pfleging, B. Preparing Drivers for Planned Control Transitions in Automated Cars. In 17th International Conference on Mobile and Ubiquitous Multimedia—MUM 2018, Proceedings of the 17th International Conference, Cairo, Egypt, 25–28 November 2018; Abdennadher, S., Alt, F., Eds.; ACM Press: New York, NY, USA, 2018; pp. 83–92. [Google Scholar]
- Wandtner, B.; Schömig, N.; Schmidt, G. Secondary task engagement and disengagement in the context of highly automated driving. Trans. Res. Part F Traffic Psychol. Behav. 2018, 58, 253–263. [Google Scholar] [CrossRef]
- Naujoks, F.; Kiesel, A.; Neukum, A. Cooperative warning systems: The impact of false and unnecessary alarms on drivers’ compliance. Accid. Anal. Prev. 2016, 97, 162–175. [Google Scholar] [CrossRef] [PubMed]
- Stewart, J. Drivers Wildly Overestimate What “Semiautonomous” Cars Can Do. Available online: https://bit.ly/2Ot6xFs (accessed on 17 January 2020).
- Walker, G.H.; Stanton, N.A.; Salmon, P. Trust in vehicle technology. IJVD 2016, 70, 157–182. [Google Scholar] [CrossRef]
- Körber, M.; Prasch, L.; Bengler, K. Why Do I Have to Drive Now? Post Hoc Explanations of Takeover Requests. Hum. Factors 2018, 60, 305–323. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Danner, S.; Pfromm, M.; Limbacher, R.; Bengler, K. Information Needs Regarding the Purposeful Activation of Automated Driving Functions: Under Review. In Proceedings of the Human Factors and Ergonomics Society Europe Chapter 2019 Annual Conference, Nantes, France, 2–4 October 2019. [Google Scholar]
- Ochs, M.; Pelachaud, C.; Sadek, D. An Empathic Virtual Dialog Agent to Improve Human-Machine Interaction. In Proceedings of the 7th International Joint Conference on Autonomous Agents and Multiagent Systems—Volume 1, Estoril, Portugal, 12–16 May 2008. [Google Scholar]
- Anderson, J.; Kalra, N.; Stanley, K.; Sorensen, P.; Samaras, C.; Oluwatola, O. Autonomous Vehicle Technology: A Guide for Policymakers; RAND Corporation: Santa Monica, CA, USA, 2016. [Google Scholar]
- Ellis, B.; Douglas, N.; Frost, T. Willingness to pay for driverless cars. In Australasian Transport Research Forum; Elsevier: Melbourne, Australia, 2016. [Google Scholar]
- Howard, D.; Dai, D. Public Perceptions of Self-Driving Cars: The Case of Berkeley, California. In Proceedings of the 93rd Annual Meeting of the Transportation Research Board, Washington, DC, USA, 12–16 January 2014; pp. 1–16. [Google Scholar]
- Bengler, K.; Winner, H.; Wachenfeld, W. No Human—No Cry? Automatisierungstechnik 2017, 65. [Google Scholar] [CrossRef]
- Weinbeer, V.; Baur, C.; Radlmayr, J.; Bill, J.; Muhr, T.; Bengler, K. Highly Automated Driving: How to Get the Driver Drowsy and How Does Drowsiness Influence Various Take-Over Aspects? In Proceedings of the 8. Tagung Fahrerassistenz, Munich, Germany, 22–23 November 2017. [Google Scholar]
- Körber, M.; Cingel, A.; Zimmermann, M.; Bengler, K. Vigilance Decrement and Passive Fatigue Caused by Monotony in Automated Driving. Procedia Manuf. 2015, 3, 2403–2409. [Google Scholar] [CrossRef] [Green Version]
- Feldhütter, A.; Segler, C.; Bengler, K. Does Shifting Between Conditionally and Partially Automated Driving Lead to a Loss of Mode Awareness? In Advances in Human Aspects of Transportation; Stanton, N.A., Ed.; Springer International Publishing: Cham, Switzerland, 2018; pp. 730–741. [Google Scholar]
- Pfleging, B.; Rang, M.; Broy, N. Investigating User Needs for Non-Driving-Related Activities During Automated Driving. In 15th International Conference on Mobile and Ubiquitous Multimedia—MUM ’16, Proceedings of the 15th International Conference, Rovaniemi, Finland, 12–15 December 2016; Häkkila, J., Ojala, T., Eds.; ACM Press: New York, NY, USA, 2016; pp. 91–99. [Google Scholar]
- Hecht, T.; Feldhütter, A.; Draeger, K.; Bengler, K. What Do You Do? An Analysis of Non-driving Related Activities During a 60 Minutes Conditionally Automated Highway Drive. In Human Interaction and Emerging Technologies; Ahram, T., Taiar, R., Colson, S., Choplin, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 28–34. [Google Scholar]
- Schoettle, B.; Sivak, M. A Survey of Public Opinion About Autonomous and Self-Driving Vehicles in the US, the UK and Australia. Trans. Res. Inst. 2014. [Google Scholar] [CrossRef] [Green Version]
- Ning, W.; Wang, X.; Qian, Y. Transition to Automated: The Interaction of Activating the In-vehicle Automated Driving System. In Design, User Experience, and Usability. Application Domains; Marcus, A., Wang, W., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 101–113. [Google Scholar]
- Forster, Y.; Hergeth, S.; Naujoks, F.; Krems, J.; Keinath, A. User Education in Automated Driving: Owner’s Manual and Interactive Tutorial Support Mental Model Formation and Human-Automation Interaction. Information 2019, 10, 143. [Google Scholar] [CrossRef] [Green Version]
- Beggiato, M.; Hartwich, F.; Schleinitz, K.; Krems, J.; Othersen, I.; Petermann-Stock, I. What Would Drivers Like to Know During Automated Driving? Information Needs at Different Levels of Automation. In Proceedings of the 7. Tagung Fahrerassistenz, Munich, Germany, 25–26 November 2015. [Google Scholar]
- Casner, S.M.; Hutchins, E.L. What Do We Tell the Drivers? Toward Minimum Driver Training Standards for Partially Automated Cars. J. Cogn. Eng. Decis. Mak. 2019, 13, 55–66. [Google Scholar] [CrossRef] [Green Version]
- Beggiato, M.; Krems, J.F. The evolution of mental model, trust and acceptance of adaptive cruise control in relation to initial information. Trans. Res. Part F Traffic Psychol. Behav. 2013, 18, 47–57. [Google Scholar] [CrossRef]
- Richardson, N.T.; Flohr, L.; Michel, B. Takeover Requests in Highly Automated Truck Driving: How Do the Amount and Type of Additional Information Influence the Driver—Automation Interaction? MTI 2018, 2, 68. [Google Scholar] [CrossRef] [Green Version]
- Adell, E. Driver Experience and Acceptance of Driver Support Systems. A Case of Speed Adaptation; Lund University: Lund, Sweden, 2009. [Google Scholar]
- Davis, F.D. Perceived Usefulness, Perceived Ease of Use, and User Acceptance of Information Technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef] [Green Version]
- Venkatesh, V.; Davis, F.D. A Theoretical Extension of the Technology Acceptance Model: Four Longitudinal Field Studies. Manag. Sci. 2000, 46, 186–204. [Google Scholar] [CrossRef] [Green Version]
- Bach, N. Mentale Modelle als Basis von Implementierungsstrategien; Deutscher Universitätsverlag: Wiesbaden, Germany, 2000. [Google Scholar]
- Borojeni, S.S.; Flemisch, F.; Baltzer, M.; Boll, S. Automotive UI for Controllability and Safe Transitions of Control. In 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications—AutomotiveUI ’18, Proceedings of the 10th International Conference, Toronto, ON, Canada, 23–25 September 2018; Unknown, Ed.; ACM Press: New York, NY, USA, 2018; pp. 23–29. [Google Scholar]
- Moser, K.S. Mentale Modelle und ihre Bedeutung: Kongintionspsychologische Grundlagen des (Miss-)Verstehens. Schriften Symb. 2003, 13, 181–205. [Google Scholar]
- Brave, S.; Nass, C. Emotion in Human–Computer Interaction. In Human-Computer Interaction Fundamentals; Sears, A., Jacko, J., Eds.; CRC Press: Boca Raton, FL, USA, 2009; pp. 53–68. [Google Scholar]
- Bhattacherjee, A. Understanding Information Systems Continuance: An Expectation-Confirmation Model. MIS Q. 2001, 25, 351–370. [Google Scholar] [CrossRef]
- Naujoks, F.; Forster, Y.; Wiedemann, K.; Neukum, A. Improving Usefulness of Automated Driving by Lowering Primary Task Interference through HMI Design. J. Adv. Trans. 2017, 2017, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Stanton, N.A.; Young, M.S. A proposed psychological model of driving automation. Theor. Issues Ergon. Sci. 2000, 1, 315–331. [Google Scholar] [CrossRef] [Green Version]
- Rosis, F.D.; Cavalluzzi, A.; Mazzotta, I.; Novielli, N. Can Embodied Conversational Agents Induce Empathy in Users? Available online: https://www.academia.edu/794054/Can_Embodied_Conversational_Agents_Induce_Empathy_In_Users (accessed on 17 January 2020).
- Higashinaka, R.; Dohsaka, K.; Isozaki, H. Effects of Self-Disclosure and Empathy in Human-Computer Dialogue. In Proceedings of the 2008 IEEE Spoken Language Technology Workshop, Goa, India, 15–19 December 2008; pp. 109–112. [Google Scholar]
- Bickmore, T.W.; Picard, R.W. Establishing and maintaining long-term human-computer relationships. ACM Trans. Comput. Hum. Interact. 2005, 12, 293–327. [Google Scholar] [CrossRef]
- Hone, K. Empathic agents to reduce user frustration: The effects of varying agent characteristics. Interact. Comput. 2006, 18, 227–245. [Google Scholar] [CrossRef]
- Häuslschmid, R.; von Bülow, M.; Pfleging, B.; Butz, A. Supporting Trust in Autonomous Driving. In 22nd International Conference on Intelligent User Interfaces—IUI ’17, Proceedings of the 22nd International Conference, Limassol, Cyprus, 13–16 March 2017; Papadopoulos, G.A., Kuflik, T., Chen, F., Duarte, C., Fu, W.-T., Eds.; ACM Press: New York, NY, USA, 2017; pp. 319–329. [Google Scholar]
- Reeves, B.; Nass, C.I. The Media Equation. How People Treat Computers, Televisions, and New Media Like Real People and Places, 2nd ed.; CSLI Publisher: Stanford, CA, USA, 1997. [Google Scholar]
- Brown, T. Design Thinking. Haward Bus. Rev. 2008, 86, 84. [Google Scholar]
- Schallmo, D.R.A. Design Thinking Erfolgreich Anwenden. So Entwickeln Sie in 7 Phasen Kundenorientierte Produkte und Dienstleistungen; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2017. [Google Scholar]
- Van der Laan, J.D.; Heino, A.; de Waard, D. A simple procedure for the assessment of acceptance of advanced transport telematics. Trans. Res. Part C Emerg. Technol. 1997, 5, 1–10. [Google Scholar] [CrossRef]
- Brooke, J. SUS-A quick and dirty usability scale. Usability Eval. Ind. 1996, 189, 4–7. [Google Scholar]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research. In Human Mental Workload; Elsevier: Amsterdam, The Netherlands, 1988; pp. 139–183. [Google Scholar]
- Carifio, J.; Perla, R. Resolving the 50-year debate around using and misusing Likert scales. Med. Educ. 2008, 42, 1150–1152. [Google Scholar] [CrossRef]
- Blanca, M.J.; Alarcón, R.; Arnau, J.; Bono, R.; Bendayan, R. Non-normal data: Is ANOVA still a valid option? Psicothema 2017, 29, 552–557. [Google Scholar] [CrossRef]
- Butakov, V.; Ioannou, P. Driving Autopilot with Personalization Feature for Improved Safety and Comfort. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems—(ITSC 2015), Gran Canaria, Spain, 15–18 September 2015; pp. 387–393. [Google Scholar]
- Ghazizadeh, M.; Lee, J.D.; Boyle, L.N. Extending the Technology Acceptance Model to assess automation. Cogn. Tech. Work 2012, 14, 39–49. [Google Scholar] [CrossRef]
- Braun, M.; Schubert, J.; Pfleging, B.; Alt, F. Improving Driver Emotions with Affective Strategies. MTI 2019, 3, 21. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Baseline Concept | Time before Activation Concept | Time before Activation Plus Personal Approach Concept | |
| Automation available | Pop-up + icon displaying availability | Pop-up + icon displaying availability + time bar and countdown displaying availability duration | Pop-up with different wording + icon displaying availability + time bar and countdown displaying availability duration |
| Request to intervene (RtI) | Request to intervene + countdown | Request to intervene + countdown | Request to intervene with different wording + countdown |
| BL | TB | TBP | |||||
|---|---|---|---|---|---|---|---|
| Acceptance | Positive Condition | 0.69 (0.94) | 0.57 (1.04) | 1.05 (0.50) | 1.11 (0.46) | 0.92 (0.52) | 1.04 (0.46) |
| Negative Condition | 0.45 (1.14) | 1.17 (0.43) | 1.15 (0.39) | ||||
| Usability | Positive Condition | 67.66 (22.37) | 66.59 (21.00) | 78.75 (11.97) | 80.23 (11.72) | 79.38 (15.69) | 79.32 (14.57) |
| Negative Condition | 65.59 (20.26) | 81.62 (11.66) | 79.26 (13.91) | ||||
| Workload | Positive Condition | 5.56 (3.51) | 6.97 (4.16) | 5.18 (2.67) | 5.91 (3.23) | 4.31 (3.10) | 5.69 (3.47) |
| Negative Condition | 8.09 (4.44) | 6.64 (3.44) | 6.89 (3.46) | ||||
| Purposefulness of activation behavior | Positive Condition | 58.34% (12.17) | 44.44% (17.01) | 76.04% (19.21) | 74.24% (21.69) | 84.38% (14.23) | 81.82% (20.98) |
| Negative Condition | 31.37% (8.08) | 72.55% (24.25) | 79.41% (26.04) | ||||
| Mean Difference | p | ||
|---|---|---|---|
| BL—Positive | TB—Positive | 17.70 | 0.009 1 |
| TBP—Positive | 26.04 | 0.001 1 | |
| BL—Negative | TB—Negative | 41.18 | 0.001 1 |
| TBP—Negative | 48,04 | 0.000 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Danner, S.; Pfromm, M.; Bengler, K. Does Information on Automated Driving Functions and the Way of Presenting It before Activation Influence Users’ Behavior and Perception of the System? Information 2020, 11, 54. https://0-doi-org.brum.beds.ac.uk/10.3390/info11010054
Danner S, Pfromm M, Bengler K. Does Information on Automated Driving Functions and the Way of Presenting It before Activation Influence Users’ Behavior and Perception of the System? Information. 2020; 11(1):54. https://0-doi-org.brum.beds.ac.uk/10.3390/info11010054
Chicago/Turabian StyleDanner, Simon, Matthias Pfromm, and Klaus Bengler. 2020. "Does Information on Automated Driving Functions and the Way of Presenting It before Activation Influence Users’ Behavior and Perception of the System?" Information 11, no. 1: 54. https://0-doi-org.brum.beds.ac.uk/10.3390/info11010054