First, we assess the accuracy of the automatic
calculation. Algorithm 1 was employed with
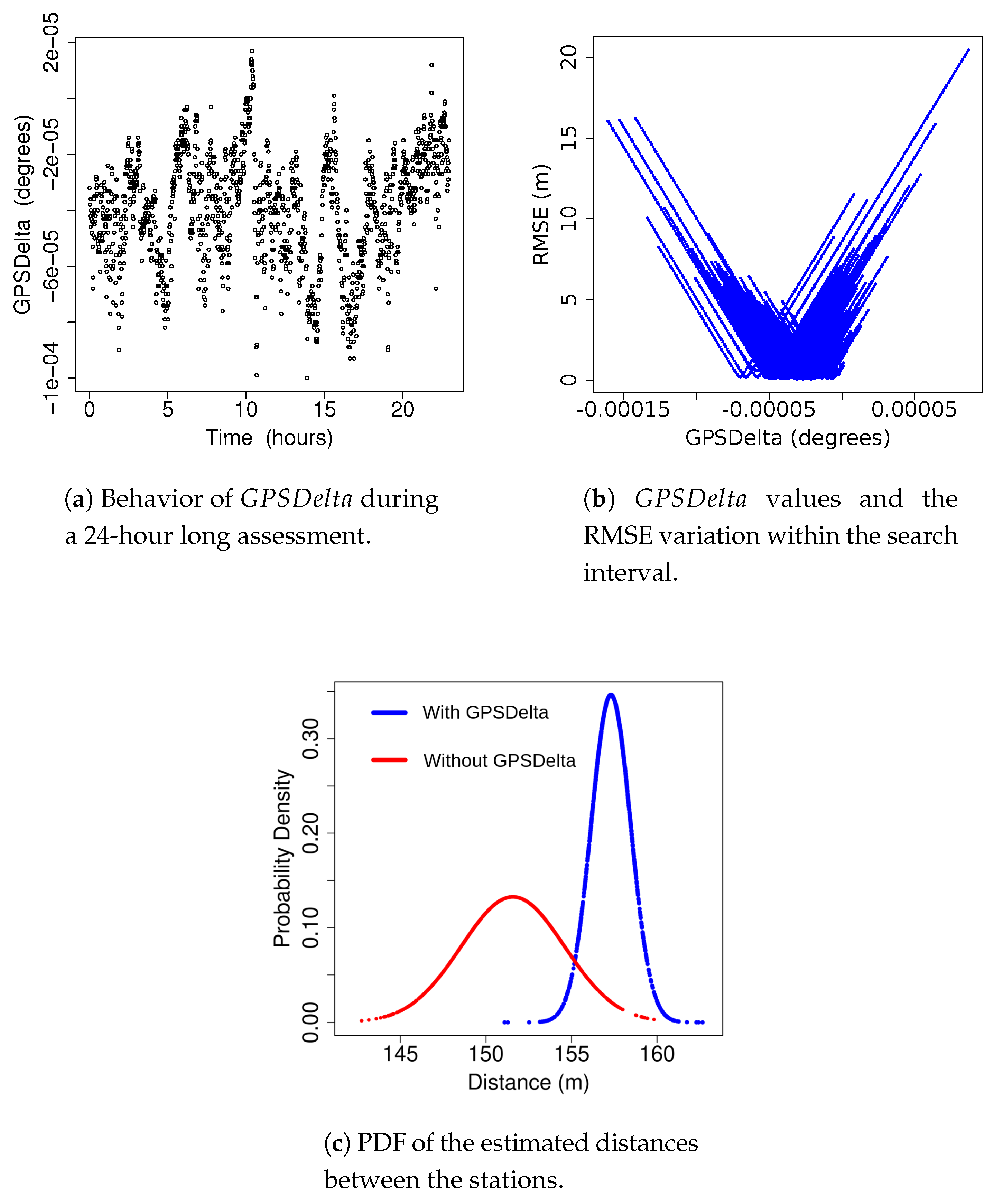
, producing a reasonably small confidence interval. This process runs in an infinite loop with one iteration every 70 s, approximately. The algorithm was executed during 24 h. At each iteration, 50 new coordinates are processed and a new
is calculated.
Figure 6a indicates the determined values and
Figure 6b indicates the RMSE variation. Each V-shaped dotted line corresponds to the RMSE variation during the search interval corresponding to 50 samples. Although the CT2 controller sends data at a rate of one packet every 1.5 s to the vehicle controller, the transmitted values remain unchanged until the next iteration.
Figure 6c shows the Probability Density Function (PDF) of the estimated distance between stations CT1 and CT2 with and without the
correction.
Table 2 presents statistical data, including mean, standard deviation, and the 95% confidence interval of 1500 packets captured from the CT2 Controller to the Vehicle Controller. We can observe a shift of the CT1–CT2 mean distance to the real distance value (157.3 m) and a significant reduction in the standard deviation when
is applied. Confidence intervals were calculated under Student’s
t probability distribution area [
15].
Afterwards, in a different day, the performance of the full system was evaluated by experiments carried out through sixteen round-trips in the MagLev-Cobra train.
Figure 7a shows, for a set of trips from CT2 to CT1, the distance measured between the vehicle and the CT1 station at the moment when the safe braking mechanism was activated. The Vehicle Controller, then, triggers the GPS update rate error correction procedure, starting the
delay. We can observe that trips 7 and 11 did not receive update rate error corrections due to the fact that
and
values were very close, resulting on 0.01 and 0.02 m errors, respectively.
Figure 7b shows the last seconds before the start of the braking sequence, in one trip. The distance evaluation events, which occur every 250 ms (the GPS receiver update rate), are represented by red points, and the green circle indicates the triggering of the error correction procedure. The distance evaluations of all trips converge to the real value, 62 m, save for trips 7 and 11.
Figure 7c,d show the same behavior for trips in the opposite direction (from CT1 to CT2). Here, the update rate error correction procedure actuated in every trip. The distance evaluation converges to the real value, 18.5 m for all trips.
Table 3 shows statistical data related to
Figure 7a,c, demonstrating a good reliability, since the standard deviation and confidence interval values are below 1 m in both directions, achieving our design requirement. Here confidence intervals were also calculated under Student’s
t probability distribution area [
15].


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}