Task-Oriented Muscle Synergy Extraction Using An Autoencoder-Based Neural Model

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
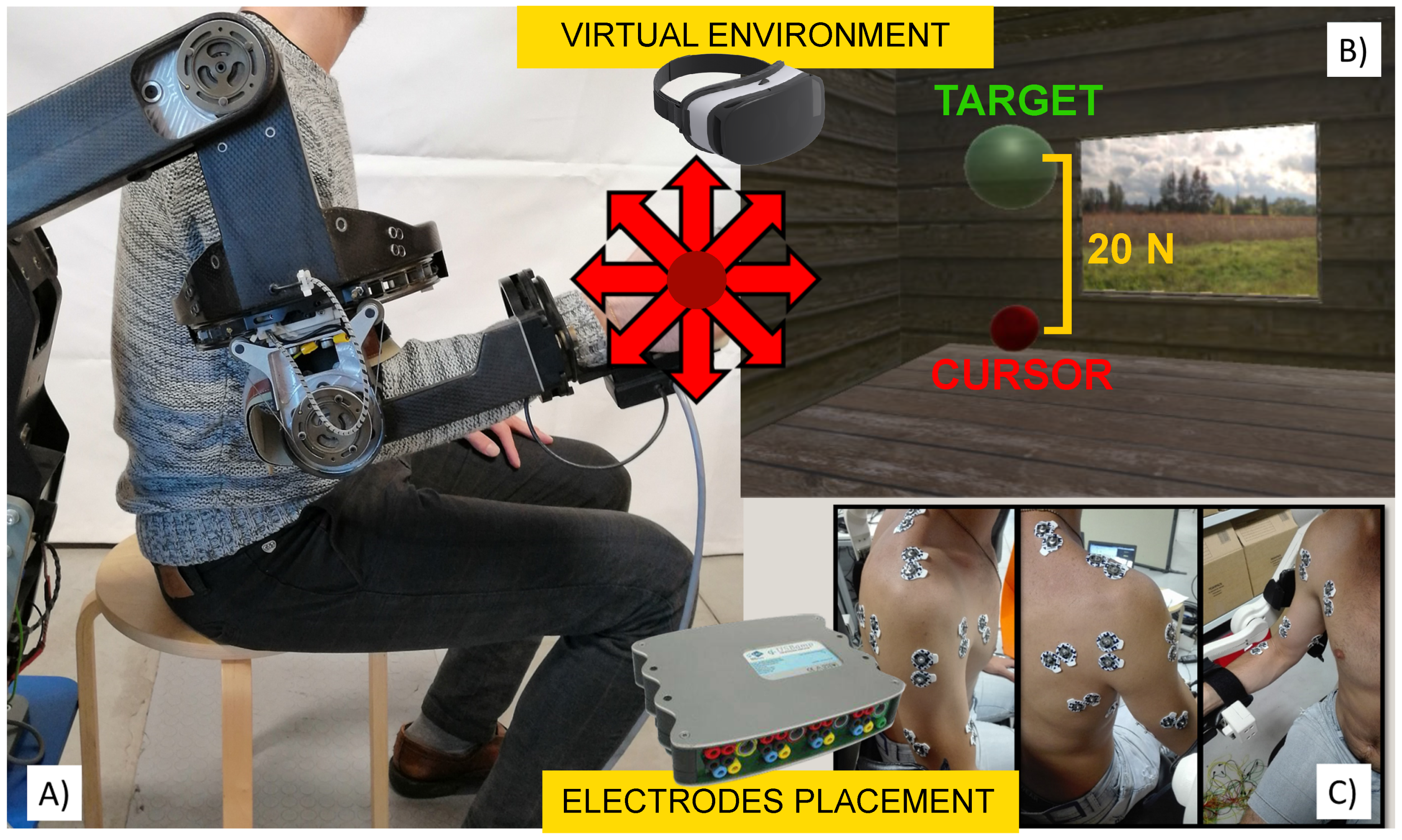
2.2. Experimental Setup
2.3. Data Acquisition Protocol
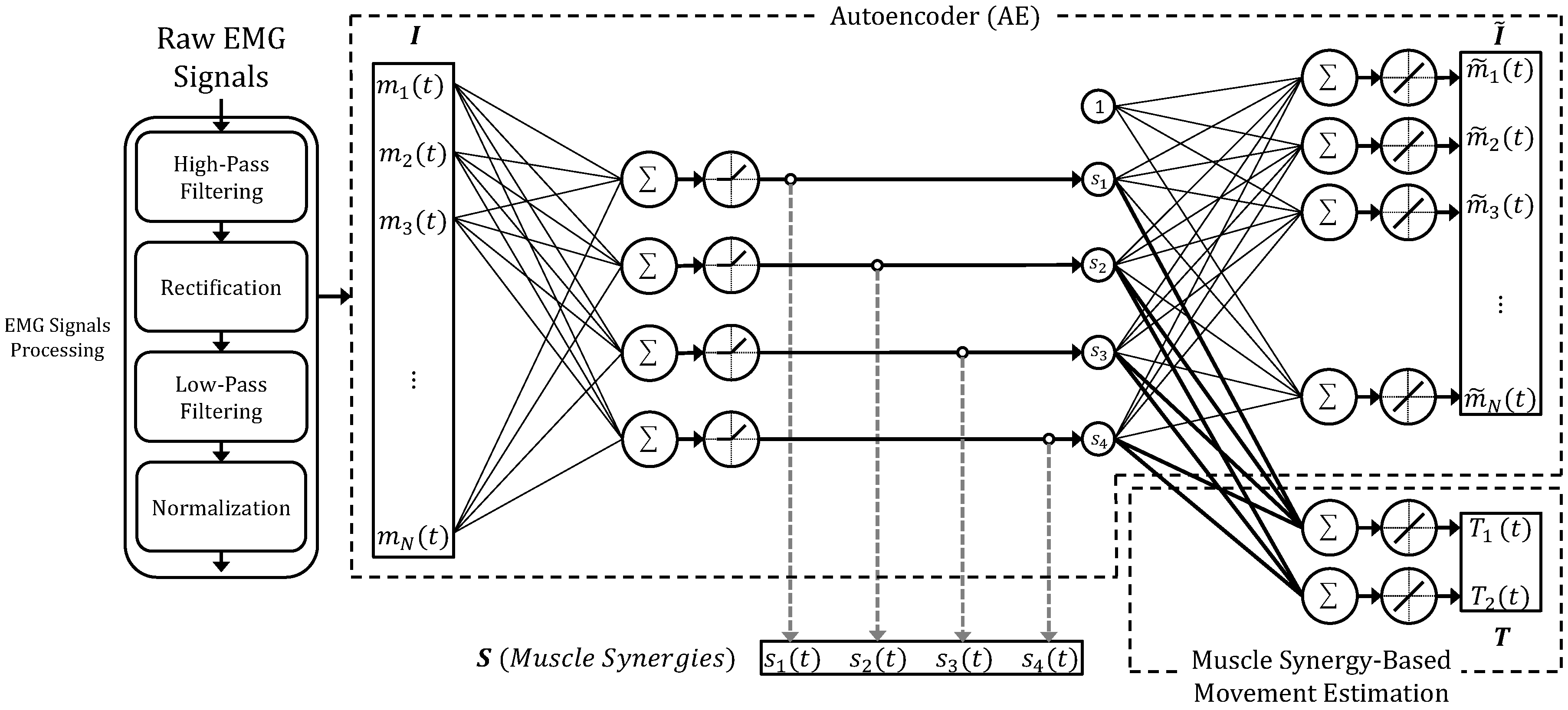
2.4. Autoencoder-Based Neural Model for Muscle Synergy Extraction and Task Optimization
2.4.1. Undercomplete Autoencoder for Muscle Synergies Extractions
2.4.2. Feed-Forward Layer for Synergy-Based Movement Intention Detection
2.4.3. Network Training
2.5. Muscle Synergy Extraction: Ae Vs Nnmf
2.6. Joint Moment Estimation Based on Muscle Synergies: Comparison with the State-Of-The-Art
- Model: , where H is exactly the same EMG-to-moment matrix extracted for the Model [13] and W is the synergy matrix extracted with the NNMF by using the Matlab function (Release 2018b);
- AE-based model: , where S is the synergy activation vector extracted by the autoencoder and are the weights of the model block devoted to the Synergy-based movement intention detection.
2.7. Model Calibration and Performance Metrics
2.8. Statistics
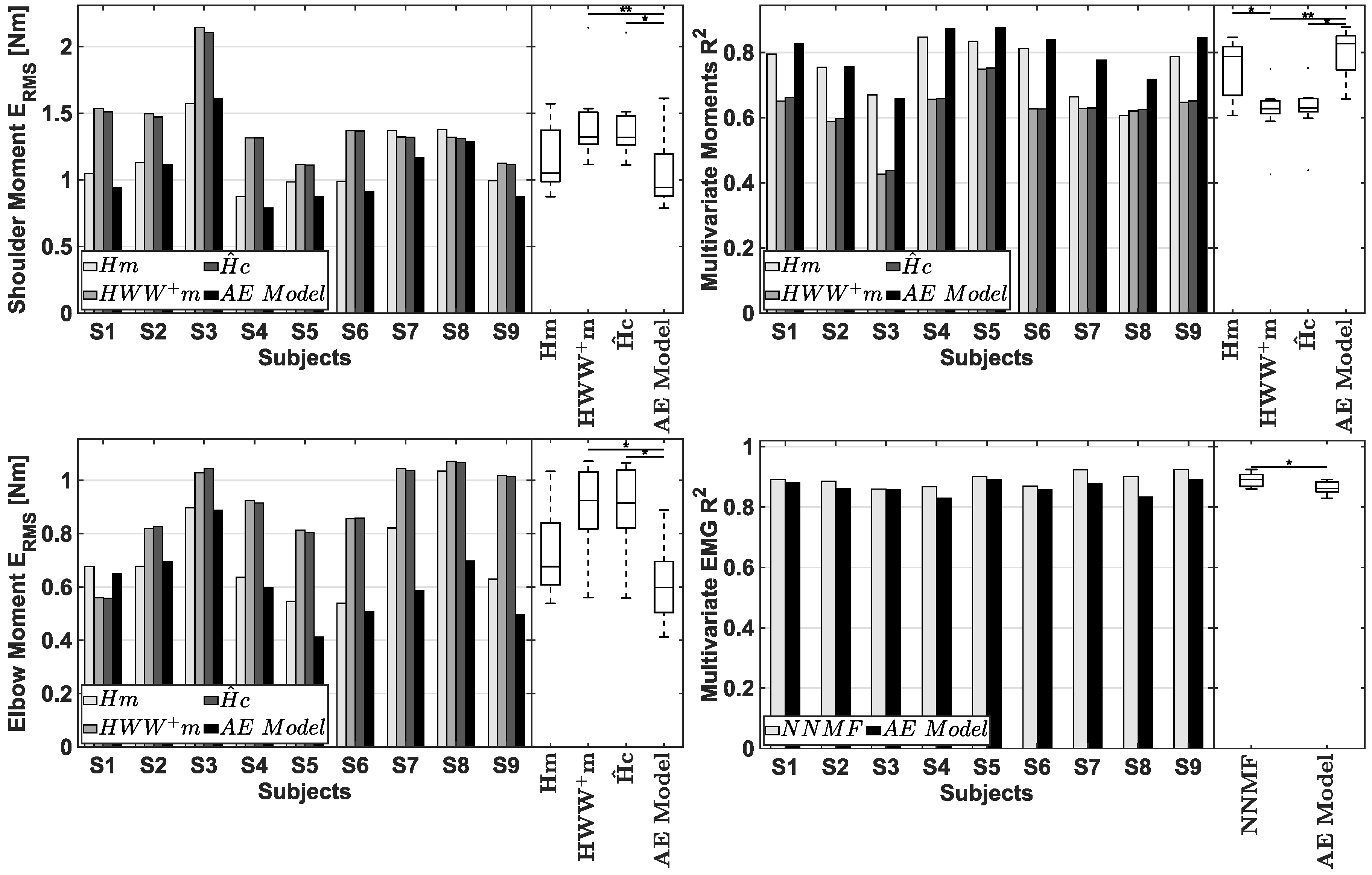
3. Results
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Farina, D.; Jiang, N.; Rehbaum, H.; Holobar, A.; Graimann, B.; Dietl, H.; Aszmann, O.C. The extraction of neural information from the surface EMG for the control of upper-limb prostheses: Emerging avenues and challenges. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 797–809. [Google Scholar] [CrossRef] [PubMed]
- Roche, A.D.; Rehbaum, H.; Farina, D.; Aszmann, O.C. Prosthetic myoelectric control strategies: A clinical perspective. Curr. Surg. Rep. 2014, 2, 44. [Google Scholar] [CrossRef]
- Papapicco, V.; Parri, A.; Martini, E.; Bevilacqua, V.; Crea, S.; Vitiello, N. Locomotion mode classification based on support vector machines and hip joint angles: A feasibility study for applications in wearable robotics. In Human Friendly Robotics; Ficuciello, F., Ruggiero, F., Finzi, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 197–205. [Google Scholar]
- Artemiadis, P.K.; Kyriakopoulos, K.J. EMG-based teleoperation of a robot arm in planar catching movements using ARMAX model and trajectory monitoring techniques. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA 2006), Orlando, FL, USA, 15–19 May 2006; pp. 3244–3249. [Google Scholar]
- Artemiadis, P.K.; Kyriakopoulos, K.J. An EMG-based robot control scheme robust to time-varying EMG signal features. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 582–588. [Google Scholar] [CrossRef] [PubMed]
- Graupe, D.; Cline, W.K. Functional separation of EMG signals via ARMA identification methods for prosthesis control purposes. IEEE Trans. Syst. Man Cybern. 1975, 5, 252–259. [Google Scholar] [CrossRef]
- Buchanan, T.S.; Lloyd, D.G.; Manal, K.; Besier, T.F. Neuromusculoskeletal modeling: Estimation of muscle forces and joint moments and movements from measurements of neural command. J. Appl. Biomech. 2004, 20, 367–395. [Google Scholar] [CrossRef] [Green Version]
- Lloyd, D.G.; Besier, T.F. An EMG-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo. J. Biomech. 2003, 36, 765–776. [Google Scholar] [CrossRef]
- Yao, S.; Zhuang, Y.; Li, Z.; Song, R. Adaptive admittance control for an ankle exoskeleton using an EMG-driven musculoskeletal model. Front. Neurorobot. 2018, 12, 16. [Google Scholar] [CrossRef]
- Buongiorno, D.; Barsotti, M.; Sotgiu, E.; Loconsole, C.; Solazzi, M.; Bevilacqua, V.; Frisoli, A. A neuromusculoskeletal model of the human upper limb for a myoelectric exoskeleton control using a reduced number of muscles. In Proceedings of the 2015 IEEE World Haptics Conference (WHC), Evanston, IL, USA, 22–26 June 2015; pp. 273–279. [Google Scholar] [CrossRef]
- Buongiorno, D.; Barsotti, M.; Barone, F.; Bevilacqua, V.; Frisoli, A. A linear approach to optimize an EMG-driven neuromusculoskeletal model for movement intention detection in myo-control: A case study on shoulder and elbow joints. Front. Neurorobot. 2018, 12, 74. [Google Scholar] [CrossRef]
- Buongiorno, D.; Barone, F.; Solazzi, M.; Bevilacqua, V.; Frisoli, A. A linear optimization procedure for an EMG-driven neuromusculoskeletal model parameters adjusting: Validation through a myoelectric exoskeleton control. In Haptics: Perception, Devices, Control, and Applications; Bello, F., Kajimoto, H., Visell, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 218–227. [Google Scholar] [CrossRef]
- Berger, D.J.; d’Avella, A. Effective force control by muscle synergies. Front. Comput. Neurosci. 2014, 8, 46. [Google Scholar] [CrossRef]
- Camardella, C.; Barsotti, M.; Murciego, L.P.; Buongiorno, D.; Bevilacqua, V.; Frisoli, A. Evaluating generalization capability of bio-inspired models for a myoelectric control: A pilot study. In International Conference on Intelligent Computing; Springer: Berlin, Germany, 2019; pp. 739–750. [Google Scholar]
- Gijsberts, A.; Bohra, R.; Sierra González, D.; Werner, A.; Nowak, M.; Caputo, B.; Roa, M.A.; Castellini, C. Stable myoelectric control of a hand prosthesis using non-linear incremental learning. Front. Neurorobot. 2014, 8, 8. [Google Scholar] [CrossRef] [Green Version]
- Berger, D.J.; Gentner, R.; Edmunds, T.; Pai, D.K.; d’Avella, A. Differences in adaptation rates after virtual surgeries provide direct evidence for modularity. J. Neurosci. 2013, 33, 12384–12394. [Google Scholar] [CrossRef] [PubMed]
- Bizzi, E.; Cheung, V.C. The neural origin of muscle synergies. Front. Comput. Neurosci. 2013, 7, 51. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kutch, J.J.; Valero-Cuevas, F.J. Challenges and new approaches to proving the existence of muscle synergies of neural origin. PLoS Comput. Biol. 2012, 8, e1002434. [Google Scholar] [CrossRef] [PubMed]
- Alessandro, C.; Delis, I.; Nori, F.; Panzeri, S.; Berret, B. Muscle synergies in neuroscience and robotics: From input-space to task-space perspectives. Front. Comput. Neurosci. 2013, 7, 43. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheung, V.C.; Turolla, A.; Agostini, M.; Silvoni, S.; Bennis, C.; Kasi, P.; Paganoni, S.; Bonato, P.; Bizzi, E. Muscle synergy patterns as physiological markers of motor cortical damage. Proc. Natl. Acad. Sci. USA 2012, 109, 14652–14656. [Google Scholar] [CrossRef] [Green Version]
- Cheung, V.C.; Piron, L.; Agostini, M.; Silvoni, S.; Turolla, A.; Bizzi, E. Stability of muscle synergies for voluntary actions after cortical stroke in humans. Proc. Natl. Acad. Sci. USA 2009, 106, 19563–19568. [Google Scholar] [CrossRef] [Green Version]
- Wenger, N.; Moraud, E.M.; Gandar, J.; Musienko, P.; Capogrosso, M.; Baud, L.; Le Goff, C.G.; Barraud, Q.; Pavlova, N.; Dominici, N.; et al. Spatiotemporal neuromodulation therapies engaging muscle synergies improve motor control after spinal cord injury. Nat. Med. 2016, 22, 138. [Google Scholar] [CrossRef]
- Dipietro, L.; Krebs, H.I.; Fasoli, S.E.; Volpe, B.T.; Stein, J.; Bever, C.; Hogan, N. Changing motor synergies in chronic stroke. J. Neurophysiol. 2007, 98, 757–768. [Google Scholar] [CrossRef] [Green Version]
- Tropea, P.; Monaco, V.; Coscia, M.; Posteraro, F.; Micera, S. Effects of early and intensive neuro-rehabilitative treatment on muscle synergies in acute post-stroke patients: A pilot study. J. Neuroeng. Rehabil. 2013, 10, 103. [Google Scholar] [CrossRef] [Green Version]
- Safavynia, S.; Torres-Oviedo, G.; Ting, L. Muscle synergies: Implications for clinical evaluation and rehabilitation of movement. Top. Spinal Cord Inj. Rehabil. 2011, 17, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Fiorentino, M.; Uva, A.E.; Foglia, M.M.; Bevilacqua, V. Wearable rumble device for active asymmetry measurement and correction in lower limb mobility. In Proceedings of the 2011 IEEE International Symposium on Medical Measurements and Applications, Bari, Italy, 30–31 May 2011; pp. 550–554. [Google Scholar] [CrossRef]
- D’Avella, A.; Portone, A.; Fernandez, L.; Lacquaniti, F. Control of fast-reaching movements by muscle synergy combinations. J. Neurosci. 2006, 26, 7791–7810. [Google Scholar] [CrossRef] [Green Version]
- Lunardini, F.; Casellato, C.; d’Avella, A.; Sanger, T.D.; Pedrocchi, A. Robustness and reliability of synergy-based myocontrol of a multiple degree of freedom robotic arm. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 24, 940–950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, N.; Rehbaum, H.; Vujaklija, I.; Graimann, B.; Farina, D. Intuitive, online, simultaneous, and proportional myoelectric control over two degrees-of-freedom in upper limb amputees. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 22, 501–510. [Google Scholar] [CrossRef]
- Tresch, M.C.; Cheung, V.C.; d’Avella, A. Matrix factorization algorithms for the identification of muscle synergies: Evaluation on simulated and experimental data sets. J. Neurophysiol. 2006, 95, 2199–2212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, D.D.; Seung, H.S. Algorithms for non-negative matrix factorization. In Advances in Neural Information Processing Systems 13; Leen, T.K., Dietterich, T.G., Tresp, V., Eds.; MIT Press: Cambridge, MA, USA, 2001; pp. 556–562. [Google Scholar]
- Tkach, D.; Huang, H.; Kuiken, T.A. Study of stability of time-domain features for electromyographic pattern recognition. J. Neuroeng. Rehabil. 2010, 7, 21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ison, M.; Artemiadis, P. The role of muscle synergies in myoelectric control: Trends and challenges for simultaneous multifunction control. J. Neural Eng. 2014, 11, 051001. [Google Scholar] [CrossRef] [PubMed]
- Buongiorno, D.; Camardella, C.; Cascarano, G.D.; Pelaez Murciego, L.; Barsotti, M.; De Feudis, I.; Frisoli, A.; Bevilacqua, V. An undercomplete autoencoder to extract muscle synergies for motor intention detection. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Vujaklija, I.; Shalchyan, V.; Kamavuako, E.N.; Jiang, N.; Marateb, H.R.; Farina, D. Online mapping of EMG signals into kinematics by autoencoding. J. Neuroeng. Rehabil. 2018, 15, 21. [Google Scholar] [CrossRef]
- Buongiorno, D.; Cascarano, G.D.; Brunetti, A.; De Feudis, I.; Bevilacqua, V. A Survey on peep learning in electromyographic signal analysis. In Intelligent Computing Methodologies; Huang, D.S., Huang, Z.K., Hussain, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 751–761. [Google Scholar]
- Lv, B.; Sheng, X.; Zhu, X. Improving myoelectric pattern recognition robustness to electrode shift by autoencoder. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 17–21 July 2018; pp. 5652–5655. [Google Scholar] [CrossRef]
- Chvatal, S.A.; Torres-Oviedo, G.; Safavynia, S.A.; Ting, L.H. Common muscle synergies for control of center of mass and force in nonstepping and stepping postural behaviors. J. Neurophysiol. 2011, 106, 999–1015. [Google Scholar] [CrossRef] [Green Version]
- Ting, L.H.; Macpherson, J.M. A limited set of muscle synergies for force control during a postural task. J. Neurophysiol. 2005, 93, 609–613. [Google Scholar] [CrossRef] [Green Version]
- Torres-Oviedo, G.; Macpherson, J.M.; Ting, L.H. Muscle synergy organization is robust across a variety of postural perturbations. J. Neurophysiol. 2006, 96, 1530–1546. [Google Scholar] [CrossRef] [Green Version]
- Barradas, V.R.; Kutch, J.J.; Kawase, T.; Koike, Y.; Schweighofer, N. When 90% of the variance is not enough: Residual EMG from muscle synergy extraction influences task performance. BioRxiv 2019, 634758. [Google Scholar] [CrossRef] [PubMed]
- Frisoli, A.; Rocchi, F.; Marcheschi, S.; Dettori, A.; Salsedo, F.; Bergamasco, M. A new force-feedback arm exoskeleton for haptic interaction in virtual environments. In Proceedings of the First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, World Haptics Conference, Pisa, Italy, 18–20 March 2005; pp. 195–201. [Google Scholar]
- The MathWorks, Inc. Available online: https://it.mathworks.com/products/matlab.html (accessed on 16 April 2020).
- Ye, F.; Chen, C.; Zheng, Z. Deep autoencoder-like nonnegative matrix factorization for community detection. In Proceedings of the 27th ACM International Conference on Information and Knowledge Management, Turin, Italy, 22–26 October 2018; pp. 1393–1402. [Google Scholar]
- Bando, Y.; Mimura, M.; Itoyama, K.; Yoshii, K.; Kawahara, T. Statistical speech enhancement based on probabilistic integration of variational autoencoder and non-negative matrix factorization. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 716–720. [Google Scholar]
- Zia ur Rehman, M.; Gilani, S.; Waris, A.; Niazi, I.; Slabaugh, G.; Farina, D.; Kamavuako, E. Stacked sparse autoencoders for EMG-based classification of hand motions: A comparative multi day analyses between surface and intramuscular EMG. Appl. Sci. 2018, 8, 1126. [Google Scholar] [CrossRef] [Green Version]
- Bevilacqua, V.; Buongiorno, D.; Carlucci, P.; Giglio, F.; Tattoli, G.; Guarini, A.; Sgherza, N.; De Tullio, G.; Minoia, C.; Scattone, A.; et al. A supervised CAD to support telemedicine in hematology. In Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–16 July 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Dimauro, G.; Girardi, F.; Gelardi, M.; Bevilacqua, V.; Caivano, D. Rhino-Cyt: A system for supporting the rhinologist in the analysis of nasal cytology. Intell. Comput. Theor. Appl. 2018, 619–630. [Google Scholar] [CrossRef]
- Buongiorno, D.; Trotta, G.F.; Bortone, I.; Di Gioia, N.; Avitto, F.; Losavio, G.; Bevilacqua, V. Assessment and rating of movement impairment in Parkinson’s disease using a low-cost vision-based system. In Intelligent Computing Methodologies; Huang, D.S., Gromiha, M.M., Han, K., Hussain, A., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 777–788. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A.; Bengio, Y. Deep Learning; MIT Press: Cambridge, UK, 2016; Volume 1. [Google Scholar]
- Buongiorno, D.; Barone, F.; Berger, D.J.; Cesqui, B.; Bevilacqua, V.; d’Avella, A.; Frisoli, A. Evaluation of a pose-shared synergy-based isometric model for hand force estimation: Towards myocontrol. In Converging Clinical and Engineering Research on Neurorehabilitation II; Ibáñez, J., González-Vargas, J., Azorín, J.M., Akay, M., Pons, J.L., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 953–958. [Google Scholar] [CrossRef]
- IBM. SPSS. Available online: https://www.ibm.com/analytics/spss-statistics-software (accessed on 16 April 2020).
- Jiang, N.; Englehart, K.B.; Parker, P.A. Extracting simultaneous and proportional neural control information for multiple-DOF prostheses from the surface electromyographic signal. IEEE Trans. Biomed. Eng. 2008, 56, 1070–1080. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
| Model | Shoulder Moment RMS Error [Nm] (M ± SD) | Elbow Moment RMS Error [Nm] (M ± SD) | Shoulder and Elbow Moment Multivariate R2 (M ± SD) |
|---|---|---|---|
| Shoulder Moment RMS Error | Elbow Moment RMS Error | Moment Multivariate R2 | ||||
|---|---|---|---|---|---|---|
| Pairwise Comparison | Z | p-Value | Z | p-Value | Z | p-Value |
| −1.333 | 0.171 | −1.333 | 0.171 | 1.667 | 0.037 | |
| −0.556 | 1.000 | −1.000 | 0.602 | 0.889 | 0.865 | |
| 1.222 | 0.268 | 0.778 | 1.000 | −1.000 | 0.602 | |
| 0.778 | 1.000 | 0.333 | 1.000 | −0.778 | 1.000 | |
| 2.556 | <0.001 | 2.111 | 0.003 | −2.667 | <0.001 | |
| 1.778 | 0.021 | 1.778 | 0.021 | −1.889 | 0.011 | |
| Model | sEMG Multivariate R2 | |
|---|---|---|
| M ± SD | Wilcoxon Test | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buongiorno, D.; Cascarano, G.D.; Camardella, C.; De Feudis, I.; Frisoli, A.; Bevilacqua, V. Task-Oriented Muscle Synergy Extraction Using An Autoencoder-Based Neural Model. Information 2020, 11, 219. https://0-doi-org.brum.beds.ac.uk/10.3390/info11040219
Buongiorno D, Cascarano GD, Camardella C, De Feudis I, Frisoli A, Bevilacqua V. Task-Oriented Muscle Synergy Extraction Using An Autoencoder-Based Neural Model. Information. 2020; 11(4):219. https://0-doi-org.brum.beds.ac.uk/10.3390/info11040219
Chicago/Turabian StyleBuongiorno, Domenico, Giacomo Donato Cascarano, Cristian Camardella, Irio De Feudis, Antonio Frisoli, and Vitoantonio Bevilacqua. 2020. "Task-Oriented Muscle Synergy Extraction Using An Autoencoder-Based Neural Model" Information 11, no. 4: 219. https://0-doi-org.brum.beds.ac.uk/10.3390/info11040219