Fuzzy C-Means Based Clustering and Rule Formation Approach for Classification of Bearing Faults Using Discrete Wavelet Transform

Abstract
:1. Introduction
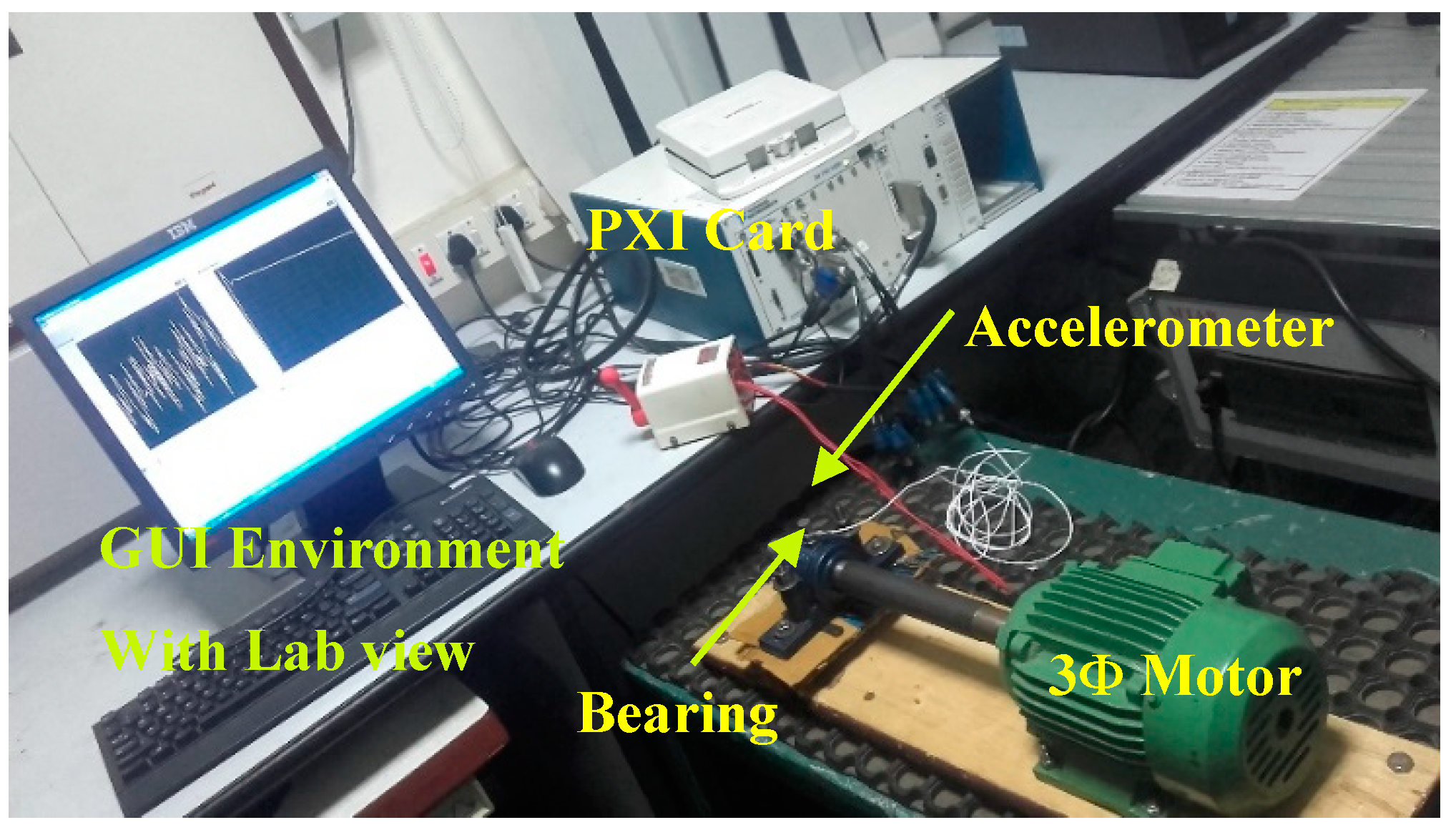
2. Experimental Arrangement
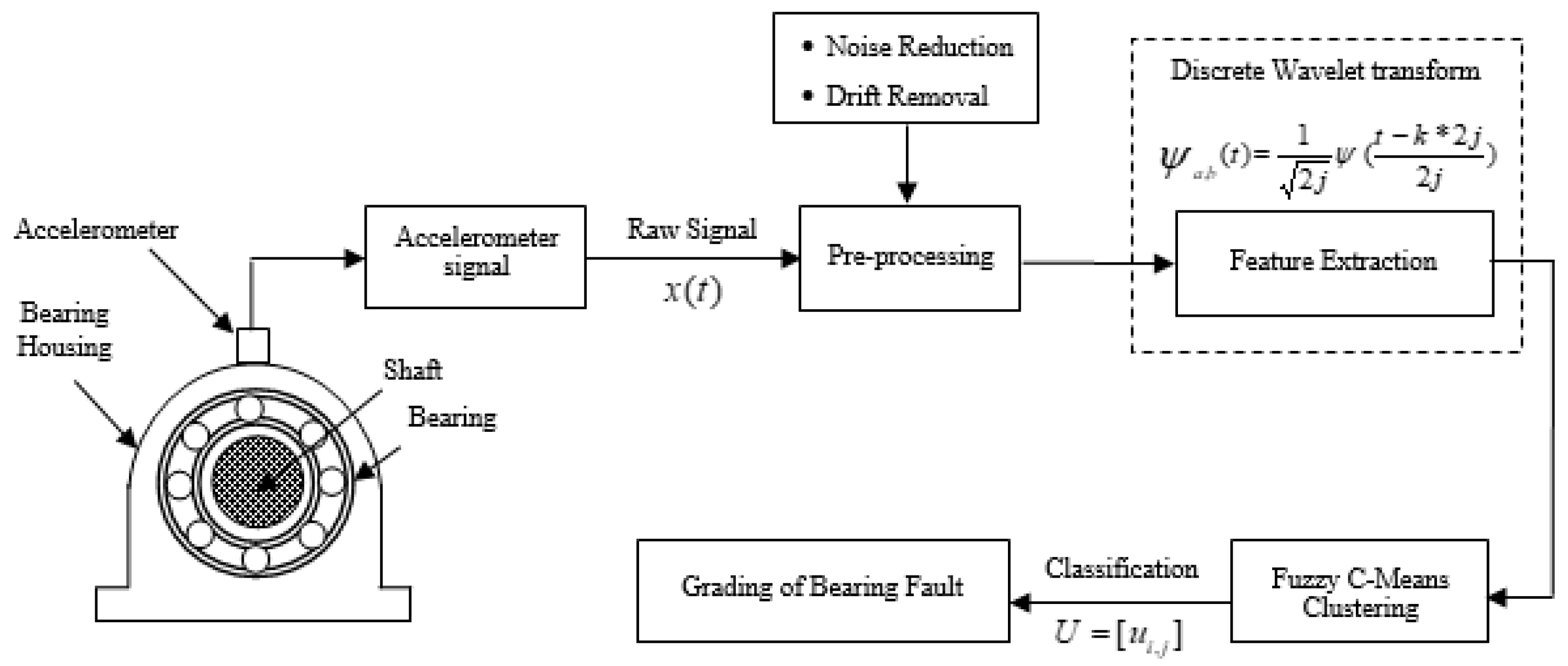
3. Proposed Methodology for Bearing Fault Classification
- (i)
- Decomposing the vibration signal into N levels using filtering and decimation to obtain the approximation and detailed coefficients;
- (ii)
- Extracting the statistical features from the DWT coefficients;
- (iii)
- Fuzzy C-Means clustering approach for grading the bearing faults using suitable fuzzy membership functions.
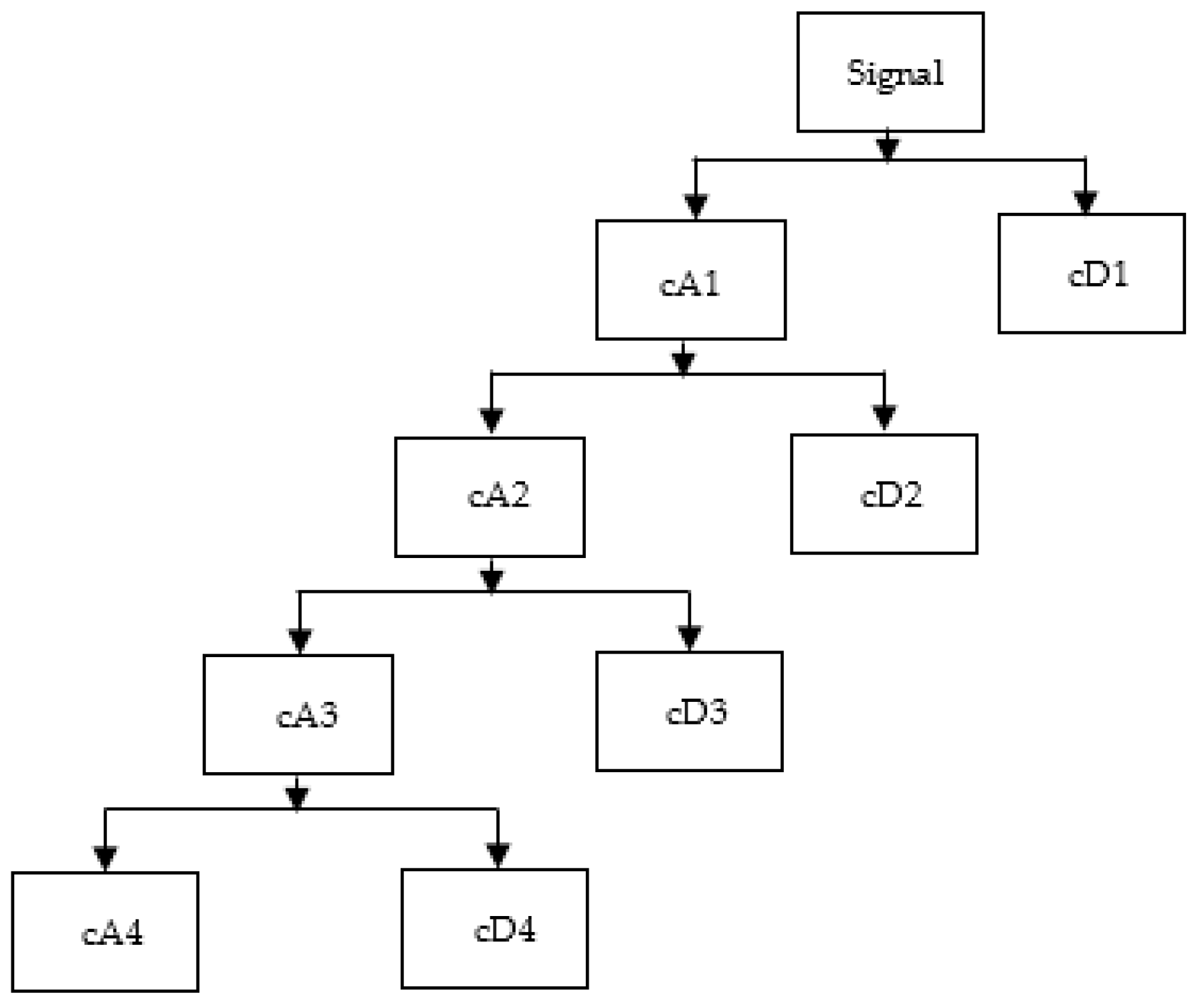
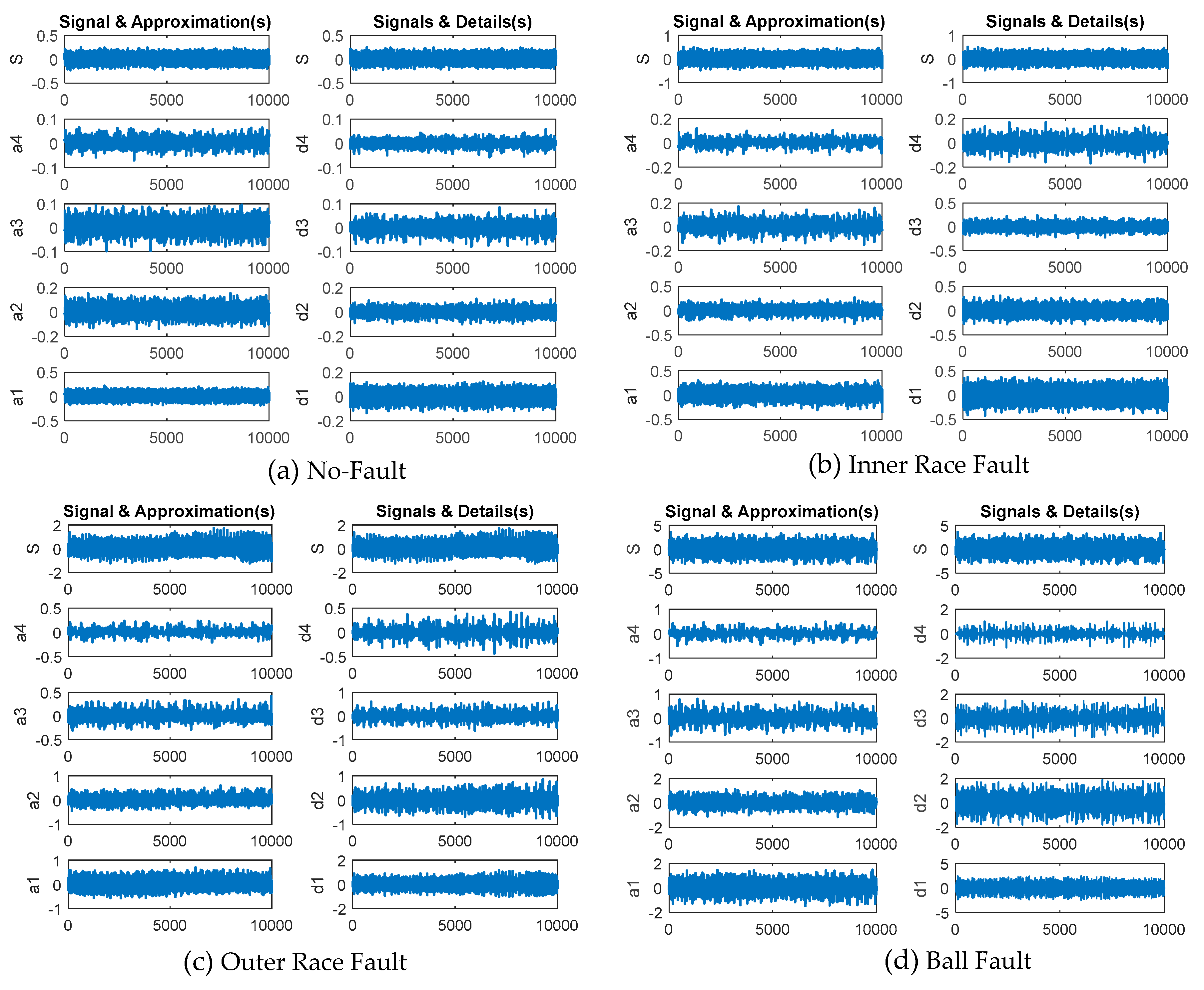
3.1. Decomposition of Vibration Signal Using Discrete Wavelet Transform
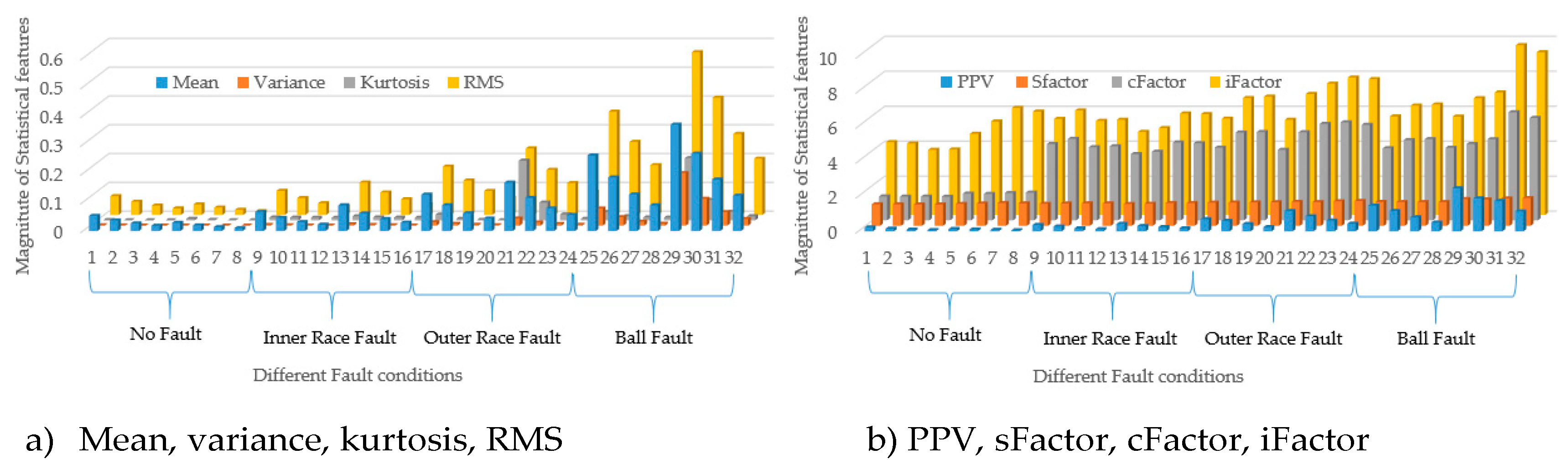
3.2. Extraction of Statistical Features for Different Bearing Faults Using DWT Coefficients
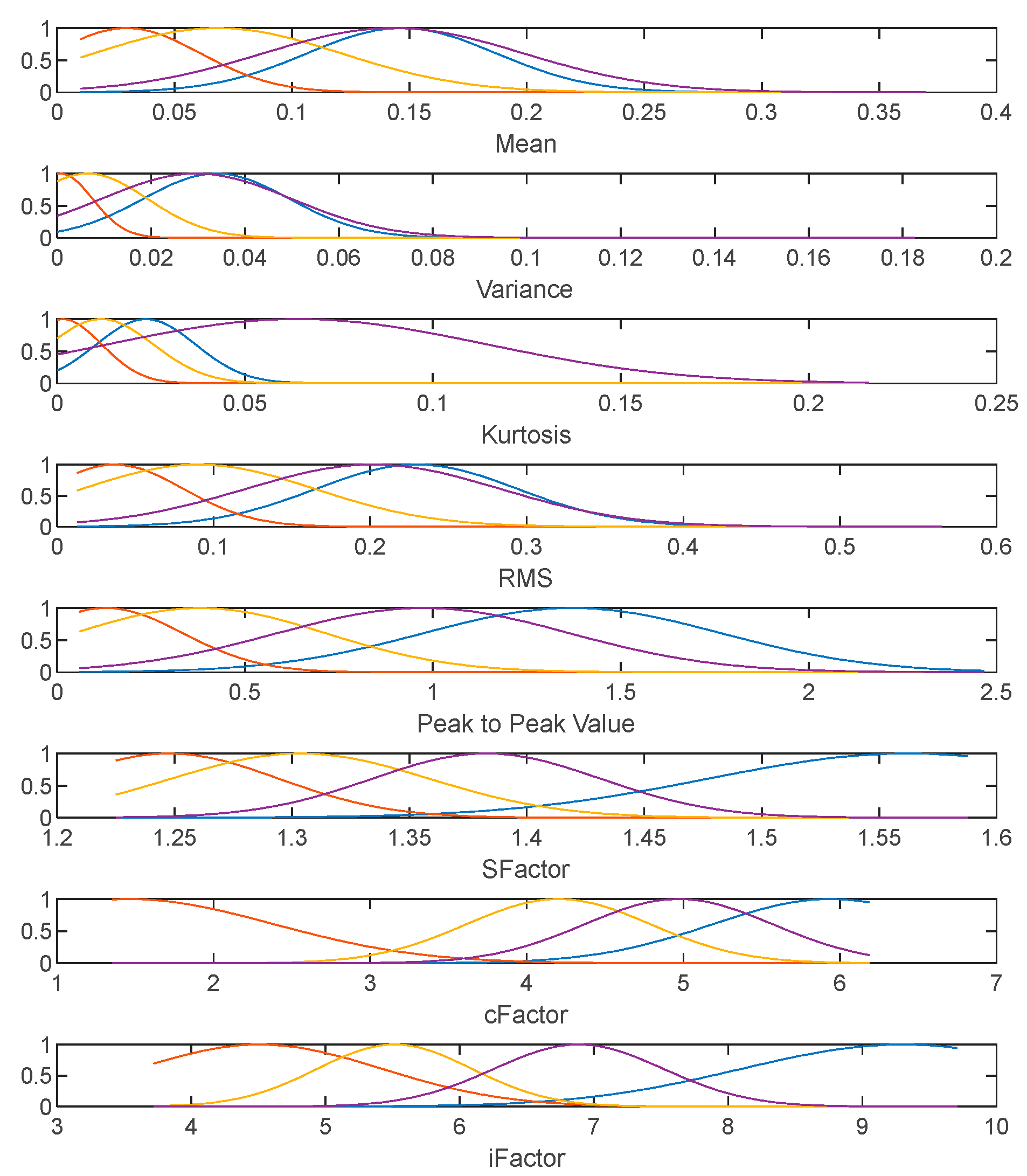
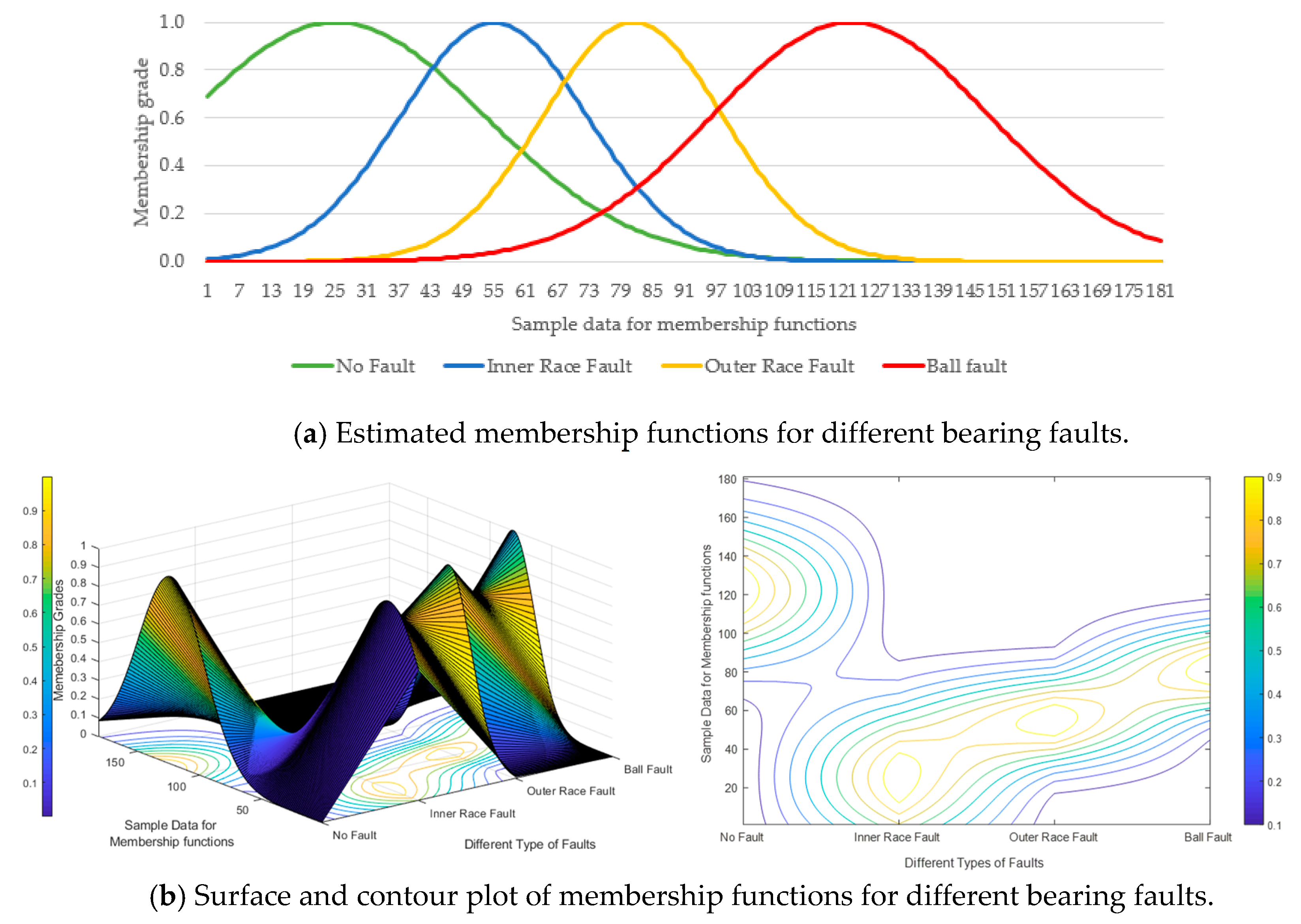
3.3. Fuzzy C-Means Clustering (FCM) of Extracted Statistical Features
3.4. Generation of Fuzzy Rules Using Cluster Centers
4. Results and Discussion
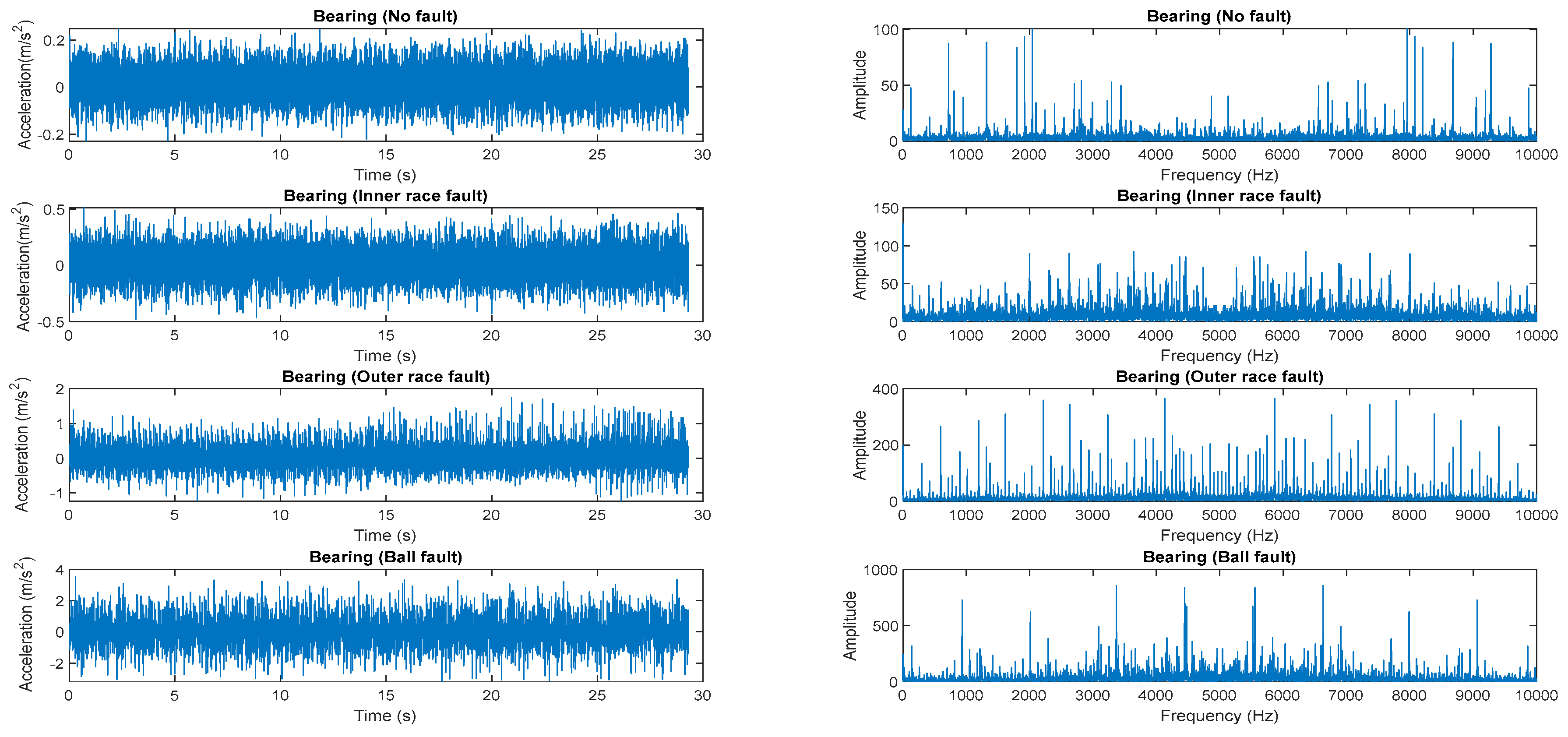
4.1. Wavelet Decomposition of Vibration Signal with Different Bearing Faults
4.2. Statistical Feature Extraction Using Wavelet Coefficients
4.3. Determination Cluster Centers Using Proposed FCM Method
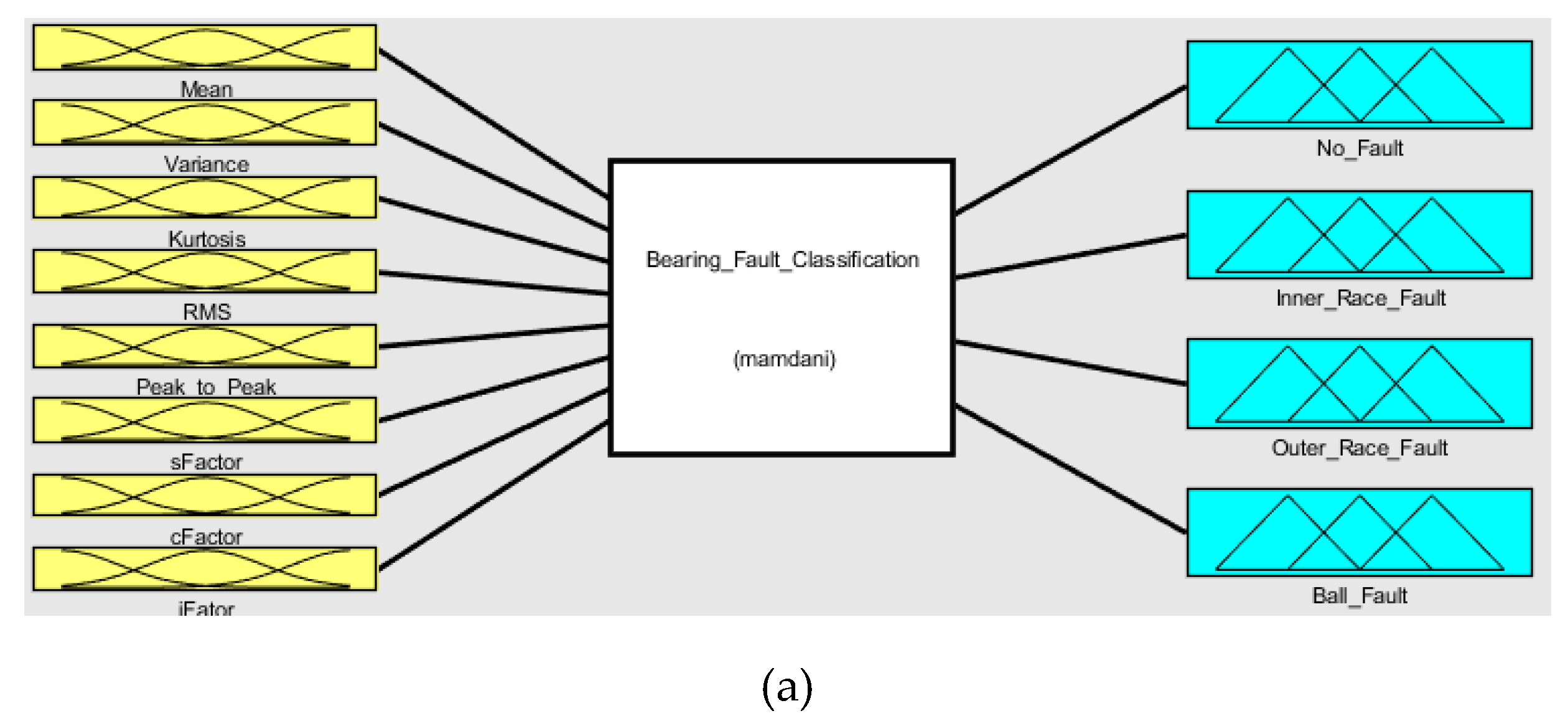
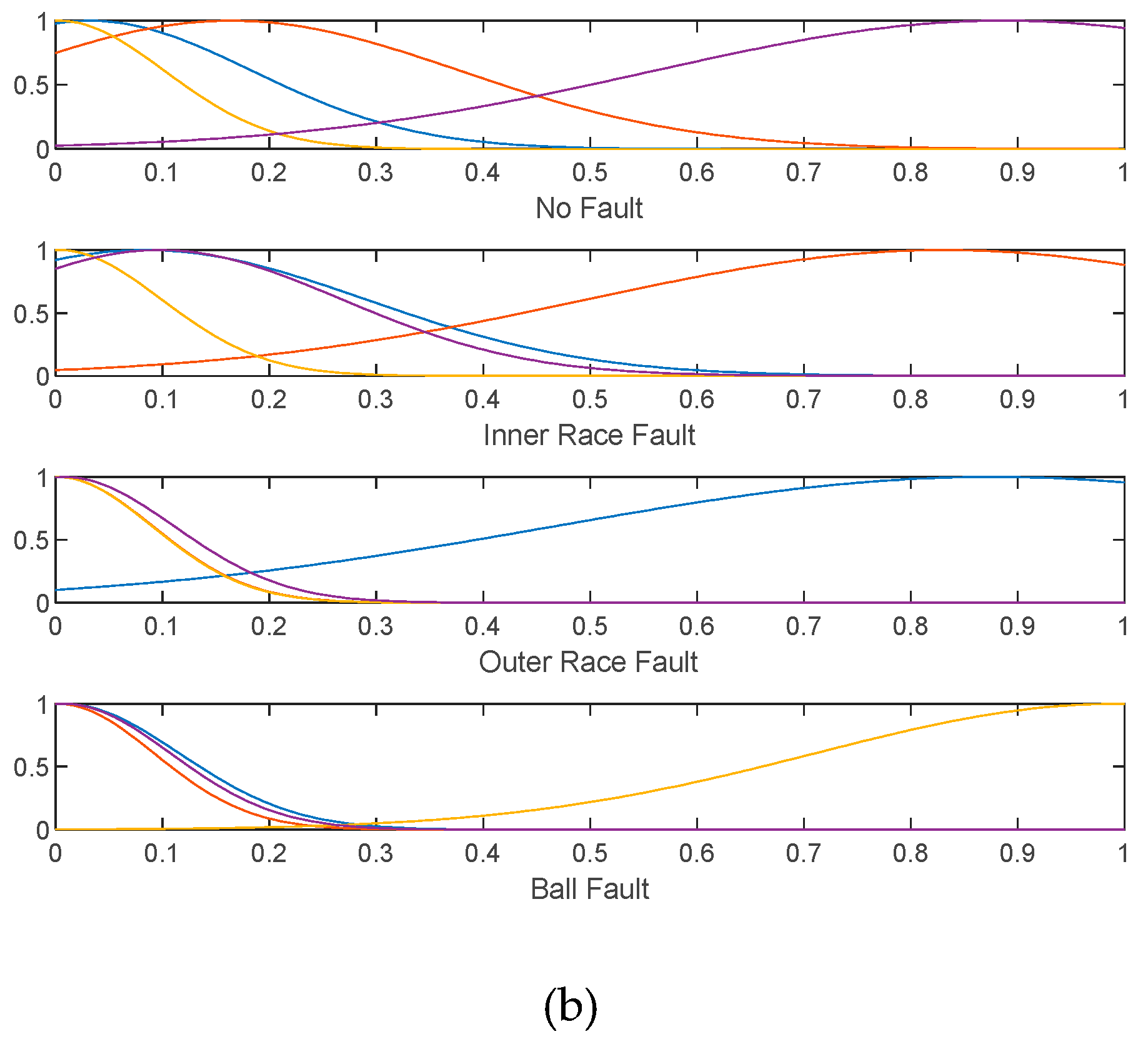
4.4. Development of Fuzzy Rule Base and Inferencing System
4.5. Validation of the Proposed Approach
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Analysis, M.V.; Maintenance, P. Practical Machinery Vibration Analysis and Predictive Maintenance; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- McFadden, P.D.; Smith, J.D. Vibration monitoring of rolling element bearings by the high-frequency resonance technique—A review. Tribol. Int. 1984, 17, 3–10. [Google Scholar] [CrossRef]
- Seryasat, O.R.; Aliyari Shoorehdeli, M.; Honarvar, F.; Rahmani, A. Multi-fault diagnosis of ball bearing based on features extracted from time-domain and multi-class support vector machine (MSVM). In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; pp. 4300–4303. [Google Scholar]
- Srivani, A.; Arunkumar, T.; Denisashok, S. Fourier Harmonic Regression Method for Bearing Condition Monitoring using Vibration Measurements. Mater. Today Proc. 2018, 5, 12151–12160. [Google Scholar] [CrossRef]
- Feng, Z.; Liang, M. Fault diagnosis of wind turbine planetary gearbox under nonstationary conditions via adaptive optimal kernel time-frequency analysis. Renew. Energy 2014, 66, 468–477. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R.B. Differential Diagnosis of Gear and Bearing Faults. J. Vib. Acoust. 2002, 124, 165. [Google Scholar] [CrossRef]
- Natu, M. Bearing Fault Analysis using Frequency and Wavelet Techniques. Int. J. Innov. Manag. Technol. 2012, 15, 72–74. [Google Scholar]
- Reddy, M.S.P.; Reddy, D.M.; Devendiran, S.; Mathew, A.T. Bearing Fault Diagnosis Using Empirical Mode Decomposition, Entropy Based Features and Data Mining Techniques. Mater. Today Proc. 2018, 5, 11460–11475. [Google Scholar]
- Zhang, X.; Liang, Y.; Zhou, J.; Zang, Y. A novel bearing fault diagnosis model integrated permutation entropy, ensemble empirical mode decomposition and optimized SVM. Measurement. 2015, 69, 164–179. [Google Scholar] [CrossRef]
- Banerjee, T.P.; Das, S. Multi-sensor data fusion using support vector machine for motor fault detection. Inf. Sci. 2012, 217, 96–107. [Google Scholar] [CrossRef]
- Kankar, P.K.; Sharma, S.C.; Harsha, S.P. Rolling element bearing fault diagnosis using wavelet transform. Neurocomputing 2011, 74, 1638–1645. [Google Scholar] [CrossRef]
- Devendiran, S.; Manivannan, K.; Rajeswari, C.; Amarnath, J.M. Bearing fault diagnosis using CWT, BGA and Artificial Bee Colony Algorithm. Int. J. Mech. Mechatron. Eng. 2015, 15. [Google Scholar]
- Rauber, T.W.; De Assis Boldt, F.; Varejão, F.M. Heterogeneous feature models and feature selection applied to bearing fault diagnosis. IEEE Trans. Ind. Electron. 2015, 62, 637–646. [Google Scholar] [CrossRef]
- Wang, D.; Miao, Q.; Kang, R. Robust health evaluation of gearbox subject to tooth failure with wavelet decomposition. J. Sound Vib. 2009, 324, 1141–1157. [Google Scholar]
- Kobayashi, Y.; Song, L.; Tomita, M.; Chen, P. Automatic Fault Detection and Isolation Method for Roller Bearing Using Hybrid-GA and Sequential Fuzzy Inference. Sensors 2019, 19, 3553. [Google Scholar] [CrossRef]
- Ben Ali, J.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar]
- Tian, Y.; Wang, Z.; Lu, C. Self-adaptive bearing fault diagnosis based on permutation entropy and manifold-based dynamic time warping. Mech. Syst. Signal Process. 2019, 114, 658–673. [Google Scholar] [CrossRef]
- Tan, J.; Fu, W.; Wang, K.; Xue, X.; Hu, W.; Shan, Y. Fault Diagnosis for Rolling Bearing Based on Semi-Supervised Clustering and Support Vector Data Description with Adaptive Parameter Optimization and Improved Decision Strategy. Appl. Sci. 2019, 9, 1676. [Google Scholar] [CrossRef]
- Kaden, M.; Lange, M.; Nebel, D.; Riedel, M.; Geweniger, T.; Villmann, T. Aspects in classification learning—Review of recent developments in learning vector quantization. Found. Comput. Decis. Sci. 2014, 39, 79–105. [Google Scholar] [CrossRef]
- Tian, Y.; Ma, J.; Lu, C.; Wang, Z. Rolling bearing fault diagnosis under variable conditions using LMD-SVD and extreme learning machine. Mech. Mach. Theory 2015, 90, 175–186. [Google Scholar]
- Zhou, P.; Lu, S.; Liu, F.; Liu, Y.; Li, G.; Zhao, J. Novel synthetic index-based adaptive stochastic resonance method and its application in bearing fault diagnosis. J. Sound Vib. 2017, 391, 194–210. [Google Scholar] [CrossRef]
- Yang, Y.; Pan, H.; Ma, L.; Cheng, J. A fault diagnosis approach for roller bearing based on improved intrinsic timescale decomposition de-noising and kriging-variable predictive model-based class discriminate. J. Vib. Control 2016, 22, 1431–1446. [Google Scholar]
- Chen, Y.; Zhang, T.; Zhao, W.; Luo, Z.; Sun, K. Fault Diagnosis of Rolling Bearing Using Multiscale Amplitude-Aware Permutation Entropy and Random Forest. Algorithms 2019, 12, 184. [Google Scholar] [CrossRef]
- Fei, S.W. Kurtosis forecasting of bearing vibration signal based on the hybrid model of empirical mode decomposition and RVM with artificial bee colony algorithm. Expert Syst. Appl. 2015, 42, 5011–5018. [Google Scholar] [CrossRef]
- Shen, C.; Xie, J.; Wang, D.; Jiang, X.; Shi, J. Improved Hierarchical Adaptive Deep Belief Network for Bearing Fault Diagnosis. Appl. Sci. 2019, 9, 3374. [Google Scholar] [CrossRef]
- Randall, R.B. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Proces. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Smith, J.D. The Vibration Produced By Multiple Point Defects Element. Sound Vib. 1985, 98, 263–273. [Google Scholar]
- Lou, X.; Loparo, K.A. Bearing fault diagnosis based on wavelet transform and fuzzy inference. Mech. Syst. Signal Process. 2004, 18, 1077–1095. [Google Scholar] [CrossRef]
- Topics, A. Tool wear monitoring with wavelet packet transform—Fuzzy clustering method. Wear 1998, 219, 145–154. [Google Scholar]
- Yang, M.S.; Lin, C.Y.; Tian, Y.C. A robust fuzzy classification maximum likelihood clustering framework. Int. J. Uncertain. Fuzziness Knowl.-Based Syst. 2013, 21, 755–776. [Google Scholar] [CrossRef]
- Wang, L.X.; Mendel, J.M. Generating Fuzzy Rules by Learning from Examples. IEEE Trans. Syst. Man Cybern. 1992, 22, 1414–1427. [Google Scholar] [CrossRef]
- Tyagi, S.; Panigrahi, S.K. A DWT and SVM based method for rolling element bearing fault diagnosis and its comparison with Artificial Neural Networks. J. Appl. Comput. Mech. 2017, 3, 80–91. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Name | ZKL6006 |
|---|---|
| Inside Dia. (d) mm | 30 |
| Outside Dia. (D) mm | 55 |
| Width Dia. (B) mm | 13 |
| Limiting speed / min | 18,000 |
| Weight (mass) Kg | 0.110 |
| S. No | Notation | Feature | Formula |
|---|---|---|---|
| 1 | x1 | Mean | |
| 2 | x2 | Variance | |
| 3 | x3 | Kurtosis | |
| 4 | x4 | Root Mean Square | |
| 5 | x5 | Peak to Peak | |
| 6 | x6 | S Factor | |
| 7 | x7 | C Factor | |
| 8 | x8 | I Factor |
| Extracted Features from DWT Coefficients | Output Classes | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| x1 | x2 | x3 | x4 | x5 | x6 | x7 | x8 | ||||||
| DWT Coefficients | cA1 | 0.0529 | 0.0014 | 0.0007 | 0.0650 | 0.2202 | 1.2284 | 1.3656 | 4.1636 | 0 | 0 | 0 | 1 |
| cA2 | 0.0372 | 0.0007 | 0.0003 | 0.0457 | 0.1519 | 1.2292 | 1.3608 | 4.0824 | 0 | 0 | 0 | 1 | |
| cA3 | 0.0265 | 0.0004 | 0.0002 | 0.0324 | 0.0984 | 1.2250 | 1.3581 | 3.7191 | 0 | 0 | 0 | 1 | |
| cA4 | 0.0185 | 0.0002 | 0.0001 | 0.0227 | 0.0692 | 1.2262 | 1.3540 | 3.7410 | 0 | 0 | 0 | 1 | |
| cA1 | 0.0665 | 0.0026 | 0.0097 | 0.0837 | 0.3653 | 1.2578 | 4.3647 | 5.4902 | 0 | 0 | 1 | 0 | |
| cA2 | 0.0458 | 0.0013 | 0.0092 | 0.0586 | 0.2732 | 1.2805 | 4.6612 | 5.9688 | 0 | 0 | 1 | 0 | |
| cA3 | 0.0314 | 0.0006 | 0.0091 | 0.0404 | 0.1690 | 1.2851 | 4.1846 | 5.3775 | 0 | 0 | 1 | 0 | |
| cA4 | 0.0221 | 0.0003 | 0.0090 | 0.0284 | 0.1203 | 1.2839 | 4.2384 | 5.4416 | 0 | 0 | 1 | 0 | |
| cA1 | 0.1266 | 0.0121 | 0.0198 | 0.1676 | 0.6974 | 1.3236 | 4.1617 | 5.5084 | 0 | 1 | 0 | 0 | |
| cA2 | 0.0897 | 0.0062 | 0.0051 | 0.1192 | 0.5991 | 1.3287 | 5.0278 | 6.6807 | 0 | 1 | 0 | 0 | |
| cA3 | 0.0621 | 0.0031 | 0.0011 | 0.0832 | 0.4201 | 1.3395 | 5.0482 | 6.7622 | 0 | 1 | 0 | 0 | |
| cA4 | 0.0437 | 0.0016 | 0.0003 | 0.0590 | 0.2377 | 1.3492 | 4.0302 | 5.4374 | 0 | 1 | 0 | 0 | |
| cA1 | 0.2624 | 0.0595 | 0.0288 | 0.3583 | 1.4778 | 1.3656 | 4.1248 | 5.6327 | 1 | 0 | 0 | 0 | |
| cA2 | 0.1863 | 0.0296 | 0.0141 | 0.2535 | 1.1643 | 1.3608 | 4.5930 | 6.2499 | 1 | 0 | 0 | 0 | |
| cA3 | 0.1273 | 0.0137 | 0.0101 | 0.1729 | 0.8036 | 1.3581 | 4.6473 | 6.3115 | 1 | 0 | 0 | 0 | |
| cA4 | 0.0895 | 0.0067 | 0.0093 | 0.1212 | 0.5030 | 1.3540 | 4.1521 | 5.6218 | 1 | 0 | 0 | 0 | |
| cD1 | 0.0289 | 0.0005 | 0.0049 | 0.0362 | 0.1339 | 1.2541 | 1.5279 | 4.6421 | 0 | 0 | 0 | 1 | |
| cD2 | 0.0198 | 0.0002 | 0.0011 | 0.0253 | 0.1058 | 1.2787 | 1.5114 | 5.3420 | 0 | 0 | 0 | 1 | |
| cD3 | 0.0137 | 0.0001 | 0.0003 | 0.0179 | 0.0840 | 1.3041 | 1.5687 | 6.1189 | 0 | 0 | 0 | 1 | |
| cD4 | 0.0100 | 0.0001 | 0.0001 | 0.0128 | 0.0589 | 1.2886 | 1.5875 | 5.9125 | 0 | 0 | 0 | 1 | |
| cD1 | 0.0896 | 0.0046 | 0.0139 | 0.1124 | 0.4257 | 1.2537 | 3.7884 | 4.7496 | 0 | 0 | 1 | 0 | |
| cD2 | 0.0616 | 0.0023 | 0.0101 | 0.0778 | 0.3056 | 1.2630 | 3.9293 | 4.9629 | 0 | 0 | 1 | 0 | |
| cD3 | 0.0416 | 0.0012 | 0.0093 | 0.0542 | 0.2415 | 1.3020 | 4.4535 | 5.7985 | 0 | 0 | 1 | 0 | |
| cD4 | 0.0293 | 0.0006 | 0.0091 | 0.0382 | 0.1688 | 1.3063 | 4.4118 | 5.7632 | 0 | 0 | 1 | 0 | |
| cD1 | 0.1683 | 0.0250 | 0.2070 | 0.2308 | 1.1637 | 1.3716 | 5.0411 | 6.9143 | 0 | 1 | 0 | 0 | |
| cD2 | 0.1151 | 0.0113 | 0.0615 | 0.1566 | 0.8642 | 1.3606 | 5.5180 | 7.5076 | 0 | 1 | 0 | 0 | |
| cD3 | 0.0790 | 0.0060 | 0.0205 | 0.1108 | 0.6212 | 1.4015 | 5.6071 | 7.8585 | 0 | 1 | 0 | 0 | |
| cD4 | 0.0560 | 0.0032 | 0.0053 | 0.0795 | 0.4345 | 1.4194 | 5.4672 | 7.7599 | 0 | 1 | 0 | 0 | |
| cD1 | 0.3697 | 0.1825 | 0.2160 | 0.5649 | 2.4667 | 1.5279 | 4.3662 | 6.6713 | 1 | 0 | 0 | 0 | |
| cD2 | 0.2691 | 0.0930 | 0.0705 | 0.4066 | 1.8856 | 1.5114 | 4.6369 | 7.0083 | 1 | 0 | 0 | 0 | |
| cD3 | 0.1793 | 0.0470 | 0.0295 | 0.2812 | 1.7403 | 1.5687 | 6.1879 | 9.7072 | 1 | 0 | 0 | 0 | |
| cD4 | 0.1230 | 0.0230 | 0.0143 | 0.1952 | 1.1436 | 1.5875 | 5.8590 | 9.3010 | 1 | 0 | 0 | 0 | |
| Features | A (No Fault) | B (Inner Race Fault) | C (Outer Race Fault) | D (Ball Fault) |
|---|---|---|---|---|
| Mean (x1) | 0.0696 | 0.0296 | 0.1421 | 0.1468 |
| Variance (x2) | 0.0067 | 0.0008 | 0.0294 | 0.0339 |
| Kurtosis (x3) | 0.0118 | 0.0014 | 0.0644 | 0.0236 |
| RMS (x4) | 0.0921 | 0.0368 | 0.2003 | 0.2300 |
| PPV (x5) | 0.3874 | 0.1296 | 0.9699 | 1.3732 |
| Sfactor (x6) | 1.3047 | 1.2475 | 1.3829 | 1.5629 |
| cFactor (x7) | 4.2012 | 1.4492 | 4.9805 | 5.9423 |
| iFactor (x8) | 5.5190 | 4.5046 | 6.9024 | 9.3055 |
| S. No | Membership Values for Different Fault Classes | |||
|---|---|---|---|---|
| µ (A) | µ (B)) | µ (C) | µ (D) | |
| 1 | 0.9974 | 0.9995 | 0.0021 | 0.9964 |
| 2 | 0.9998 | 0.9995 | 0.0022 | 0.9996 |
| 3 | 0.9995 | 0.9956 | 0.0024 | 0.9996 |
| 4 | 0.9966 | 0.9879 | 0.0025 | 0.9965 |
| 5 | 0.9911 | 0.9765 | 0.0027 | 0.9903 |
| 6 | 0.9831 | 0.9615 | 0.0029 | 0.9811 |
| 7 | 0.9725 | 0.9431 | 0.0031 | 0.9689 |
| 8 | 0.9595 | 0.9215 | 0.0033 | 0.9539 |
| 9 | 0.9441 | 0.8969 | 0.0035 | 0.9361 |
| 10 | 0.9266 | 0.8696 | 0.0038 | 0.9159 |
| 11 | 0.9070 | 0.8399 | 0.0040 | 0.8932 |
| 12 | 0.8854 | 0.8081 | 0.0043 | 0.8684 |
| 13 | 0.8621 | 0.7745 | 0.0046 | 0.8416 |
| 14 | 0.8372 | 0.7395 | 0.0049 | 0.8131 |
| 15 | 0.8109 | 0.7033 | 0.0052 | 0.7831 |
| 16 | 0.7833 | 0.6663 | 0.0056 | 0.7518 |
| 17 | 0.7547 | 0.6288 | 0.0059 | 0.7196 |
| 18 | 0.7251 | 0.5912 | 0.0063 | 0.6865 |
| 19 | 0.6949 | 0.5537 | 0.0067 | 0.6530 |
| 20 | 0.6642 | 0.5165 | 0.0072 | 0.6191 |
| Rule No | Generated Fuzzy Rules Using FCM |
|---|---|
| 1 | If (Mean is in1cluster1) and (Variance is in2cluster1) and (Kurtosis is in3cluster1) and (RMS is in4cluster1) and (Peak_to_Peak is in5cluster1) and (sFactor is in6cluster1) and (cFactor is in7cluster1) and (iFator is in8cluster1) then (No_Fault is out1cluster1)(Inner_Race_Fault is out2cluster1)(Outer_Race_Fault is out3cluster1)(Ball_Fault is out4cluster1) (1)’ |
| 2 | If (Mean is in1cluster2) and (Variance is in2cluster2) and (Kurtosis is in3cluster2) and (RMS is in4cluster2) and (Peak_to_Peak is in5cluster2) and (sFactor is in6cluster2) and (cFactor is in7cluster2) and (iFator is in8cluster2) then (No_Fault is out1cluster2)(Inner_Race_Fault is out2cluster2)(Outer_Race_Fault is out3cluster2)(Ball_Fault is out4cluster2) (1)’ |
| 3 | If (Mean is in1cluster3) and (Variance is in2cluster3) and (Kurtosis is in3cluster3) and (RMS is in4cluster3) and (Peak_to_Peak is in5cluster3) and (sFactor is in6cluster3) and (cFactor is in7cluster3) and (iFator is in8cluster3) then (No_Fault is out1cluster3)(Inner_Race_Fault is out2cluster3)(Outer_Race_Fault is out3cluster3)(Ball_Fault is out4cluster3) (1) |
| 4 | If (Mean is in1cluster4) and (Variance is in2cluster4) and (Kurtosis is in3cluster4) and (RMS is in4cluster4) and (Peak_to_Peak is in5cluster4) and (sFactor is in6cluster4) and (cFactor is in7cluster4) and (iFator is in8cluster4) then (No_Fault is out1cluster4)(Inner_Race_Fault is out2cluster4)(Outer_Race_Fault is out3cluster4)(Ball_Fault is out4cluster4) (1)’ |
| Test No | Extracted Features (For Testing Purpose) | Predicted Class | Actual Class | Classification Accuracy | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | F2 | F3 | F4 | F5 | F6 | F7 | F8 | ||||
| 1 | 0.0127 | 0.0003 | 0.0004 | 0.0315 | 0.1452 | 1.2378 | 2.1583 | 3.3411 | No Fault | No Fault | 100% |
| 2 | 0.0121 | 0.0014 | 0.0102 | 0.0556 | 0.2482 | 1.3972 | 4.4643 | 5.6920 | Inner Fault | Inner Fault | 100% |
| 3 | 0.0649 | 0.0037 | 0.0012 | 0.0790 | 0.4435 | 1.3298 | 5.0841 | 5.6227 | Outer Fault | Outer Fault | 100% |
| 4. | 0.2179 | 0.0820 | 0.0128 | 0.2722 | 1.7540 | 1.5768 | 5.9381 | 9.2712 | Ball Fault | Ball Fault | 100% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anbu, S.; Thangavelu, A.; Ashok, S.D. Fuzzy C-Means Based Clustering and Rule Formation Approach for Classification of Bearing Faults Using Discrete Wavelet Transform. Computation 2019, 7, 54. https://0-doi-org.brum.beds.ac.uk/10.3390/computation7040054
Anbu S, Thangavelu A, Ashok SD. Fuzzy C-Means Based Clustering and Rule Formation Approach for Classification of Bearing Faults Using Discrete Wavelet Transform. Computation. 2019; 7(4):54. https://0-doi-org.brum.beds.ac.uk/10.3390/computation7040054
Chicago/Turabian StyleAnbu, Srivani, Arunkumar Thangavelu, and S. Denis Ashok. 2019. "Fuzzy C-Means Based Clustering and Rule Formation Approach for Classification of Bearing Faults Using Discrete Wavelet Transform" Computation 7, no. 4: 54. https://0-doi-org.brum.beds.ac.uk/10.3390/computation7040054