
Hardware/Software Solution for Low Power Evaluation of Tsunami Danger

Abstract
:1. Introduction
2. Results
2.1. Required Resources for Tsunami Scenarios Computation—Evaluation
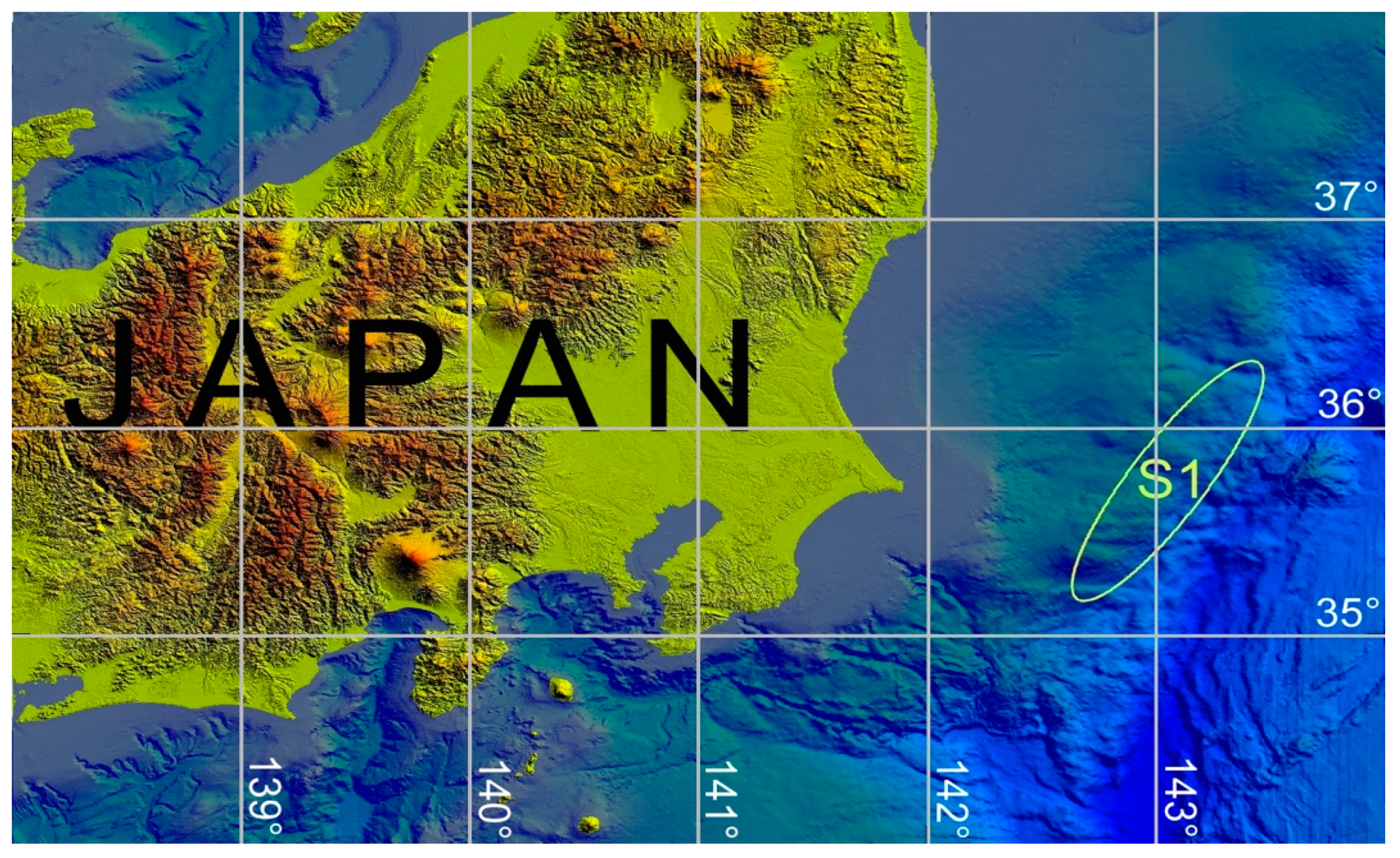
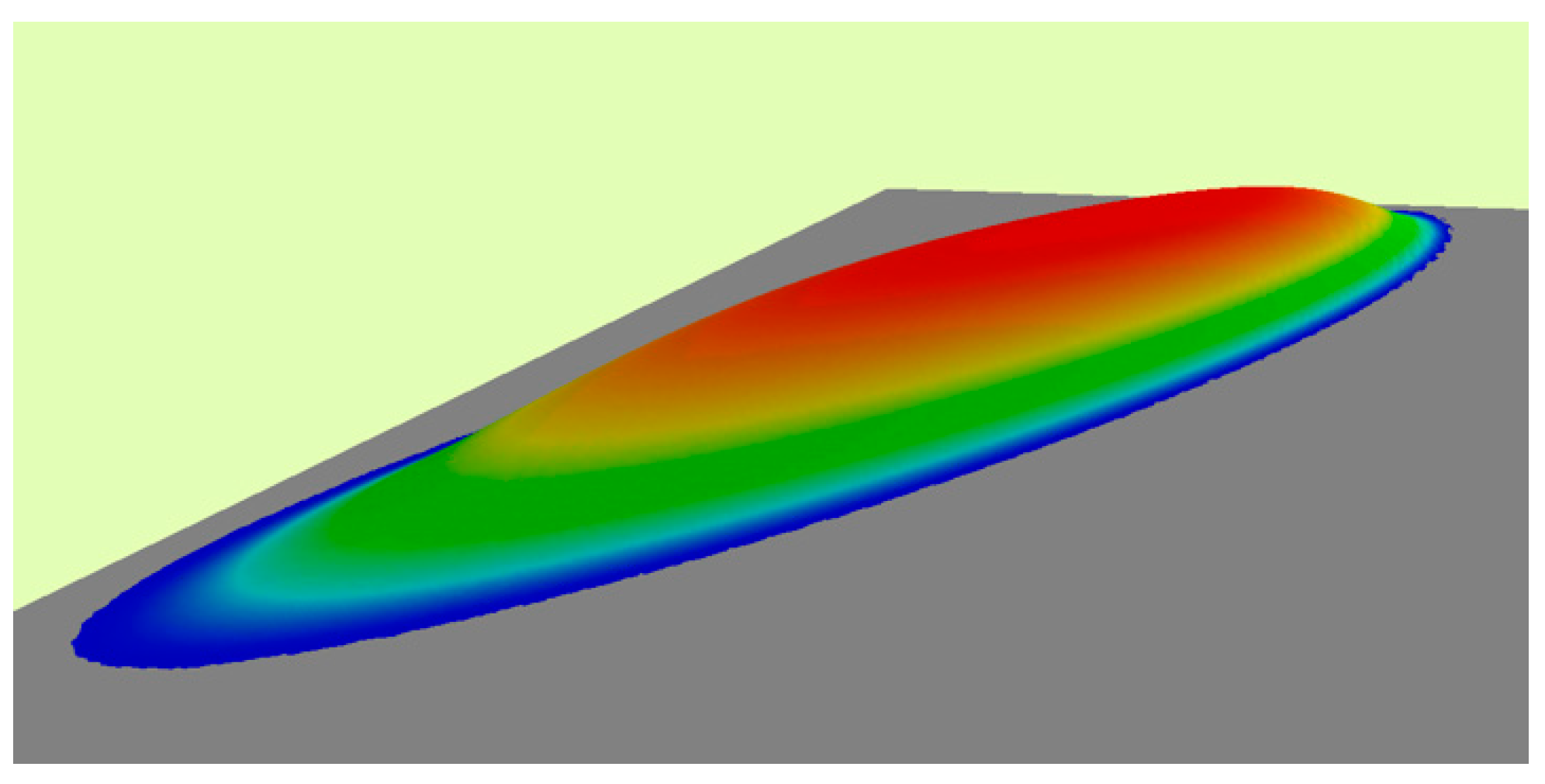
2.2. Numerical Experiment Setup
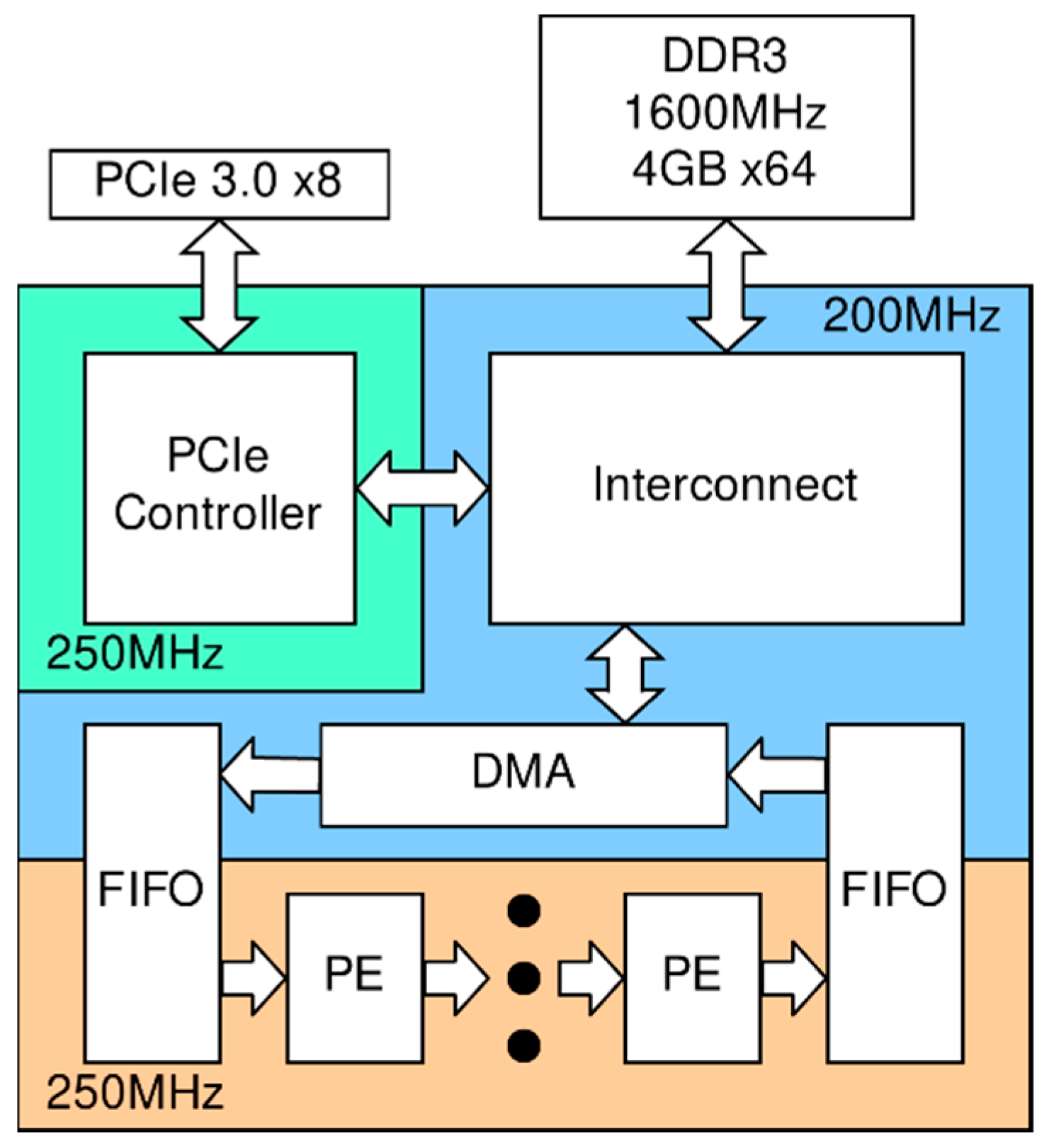
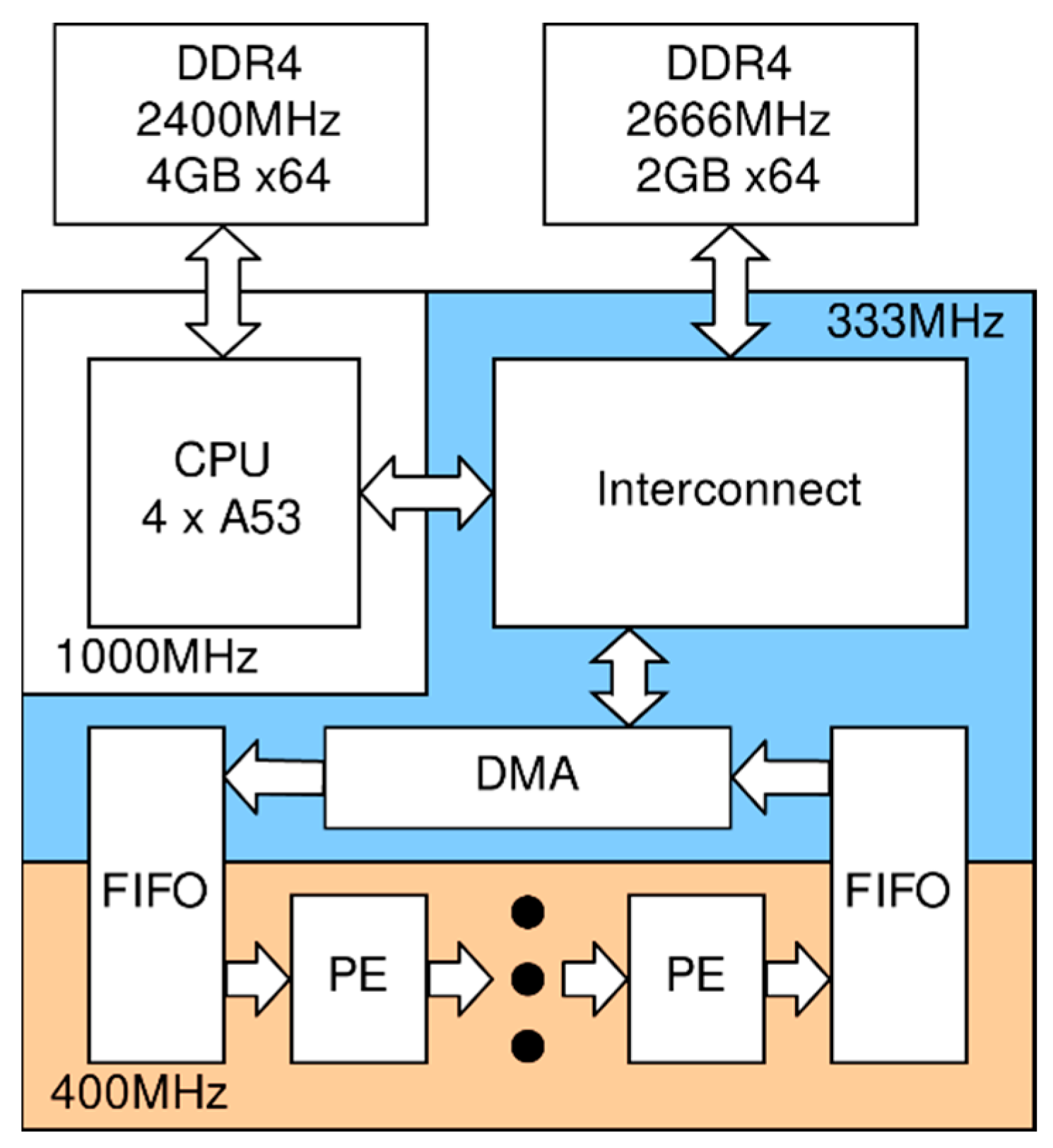
2.3. Hardware Solution Proposed
2.4. Numerical Results
3. Discussion
4. Materials and Methods
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| PC | personal computer |
| FPGA | field-programmable gate array |
| NOAA | National Oceanic and Atmospheric Administration |
| HLS | high-level synthesis |
| PDE | partial differential equation |
| MOST | Method of Splitting Tsunami |
| PE | processor element |
| SB RAS | Siberian Branch of the Russian Academy of Sciences |
| CPU | central processing unit |
| DMA | direct memory access |
| AMBA | advanced microcontroller bus architecture |
| PCIe | Peripheral Component Interconnect Express |
| TSMC | Taiwan Semiconductor Manufacturing Company |
| DDR3 | double data rate 3 memory |
| SODIMM | small outline dual in-line memory module |
| ZCU106 | Zynq UltraScale+ MPSoC ZCU106 Evaluation Kit Board |
| SoC | system-on-a-chip |
| FIFO | first-in-first-out (type of memory organization) |
| OpenMP | open multi-processing (programming standard) |
References
- Top 500. The List. Available online: http://top500.org (accessed on 4 November 2021).
- The Green 500. Available online: http://green500.org (accessed on 4 November 2021).
- Titov, V.V.; Gonzalez, F.I. Implementation and Testing of the Method of Splitting Tsunami (MOST) Model; NOAA Technical Memorandum ERL PMEL-112; Pacific Marine Environmental Laboratory: Seattle, WA, USA, 1997.
- Liu, P.L.F.; Woo, S.B.; Cho, Y.K. Computer Programs for Tsunami Propagation and Inundation; Tech. Rep.; School of Civil and Environmental Engineering, Cornell University: Ithaca, NY, USA, 1998. [Google Scholar]
- Imamura, F.; Yalciner, A.C.; Ozyurt, G. Tsunami Modelling Manual (TUNAMI Model). Available online: http://www.tsunami.civil.tohoku.ac.jp/hokusai3/J/projects/manual-ver-3.1.pdf (accessed on 14 December 2021).
- Tsushima, H.; Yusaku, Y. Review on Near-Field Tsunami Forecasting from Offshore Tsunami Data and Onshore GNSS Data for Tsunami Early Warning. J. Disaster Res. 2014, 9, 339–357. [Google Scholar] [CrossRef]
- Gica, E.; Spillane, M.; Titov, V.; Chamberlin, C.; Newman, J. Development of the Forecast Propagation Database for NOAA’s Short-Term Inundation Forecast for Tsunamis (SIFT). NOAA Technical Memorandum. 2008. Available online: https://nctr.pmel.noaa.gov/Pdf/brochures/sift_Brochure.pdf (accessed on 19 December 2021).
- Titov, V.V.; Gonzalez, F.; Mofjeld, H.; Newman, J.C. Project SIFT (Short-term inundation forecasting for tsunamis). In Submarine Landslides and Tsunamis; Springer Science + Business Media: Dordrecht, The Netherlands; pp. 715–721. [CrossRef]
- Lavrentiev, M.; Lysakov, K.; Marchuk, A.; Oblaukhov, K.; Shadrin, M. Hardware Acceleration of Tsunami Wave Propagation Modeling in the Southern Part of Japan. Appl. Sci. 2020, 10, 4159. [Google Scholar] [CrossRef]
- Vitis High-Level Synthesis User Guide. Available online: https://www.xilinx.com/support/documentation/sw_manuals/xilinx2020_2/ug1399-vitis-hls.pdf (accessed on 4 November 2021).
- Federal Research Center for Information and Computational Technologies. Available online: http://www.ict.nsc.ru/en (accessed on 6 November 2021).
- Hayashi, K.; Marchuk, A.G.; Vazhenin, A.P. Generating Boundary Conditions for the Calculation of Tsunami Propagation on Nested Grids. Numer. Anal. Appl. 2018, 11, 256–267. [Google Scholar] [CrossRef]
- JODC 500m Gridded Barhymetry Data. Available online: https://jdoss1.jodc.go.jp/vpage/depth500_file.html (accessed on 21 October 2021).
- Lavrentiev, M.M.; Marchuk, A.G.; Oblaukhov, K.K.; Romanenko, A.A. Comparative testing of MOST and Mac-Cormack numerical schemes to calculate tsunami wave propagation. J. Phys. Conf. Ser. 2020, 1666, 012028. [Google Scholar] [CrossRef]
- AMBA AXI and ACE Protocol Specification AXI3, AXI4, and AXI. Available online: https://developer.arm.com/documentation/ihi0022/e/AMBA-AXI3-and-AXI4-Protocol-Specification (accessed on 6 November 2021).
- Xilinx Virtex-7 FPGA VC709 Connectivity Kit. Available online: https://www.xilinx.com/products/boards-and-kits/dk-v7-vc709-g.html (accessed on 6 November 2021).
- Zynq UltraScale+ MPSoC ZCU106 Evaluation Kit. Available online: https://www.xilinx.com/products/boards-and-kits/zcu106.html (accessed on 6 November 2021).
- Github.com/sosy-lab/cpu-energy-meter. Available online: https://github.com/sosy-lab/cpu-energy-meter (accessed on 6 November 2021).
- Stoker, J.J. Water Waves: The Mathematical Theory with Applications; Interscience Publishers: New York, NY, USA, 1957. [Google Scholar]
- MacCormack, R.W.; Paullay, A.J. Computational Efficiency Achieved by Time Splitting of Finite–Difference Operators. In Proceedings of the 10th Aerospace Sciences Meeting, San Diego, CA, USA, 17–19 January 1972; pp. 72–154. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Core i9-9900K | VC709 | ZCU106 | |
|---|---|---|---|
| Technology used | 14 nm Intel | 28 nm TSMC | 16 nm TSMC |
| Number of streams | 8 | 8 | 4 |
| Frequency | 3600 MHz | 250 MHz | 400 MHz |
| Entire system power consumption | 141.2 W | 104.2 W | 41.1 W |
| Processor power consumption | 66.7 W | 19.5 W | 13.45 W |
| Time for one iteration | 46 ms | 3.9 ms | 4.92 ms |
| Energy consumption per iteration (system) | 6495 mJ | 406 mJ | 202 mJ |
| Energy consumption per iteration (processor) | 3068 mJ | 76 mJ | 66 mJ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lavrentiev, M.; Lysakov, K.; Marchuk, A.; Oblaukhov, K.; Shadrin, M. Hardware/Software Solution for Low Power Evaluation of Tsunami Danger. J. Low Power Electron. Appl. 2022, 12, 6. https://0-doi-org.brum.beds.ac.uk/10.3390/jlpea12010006
Lavrentiev M, Lysakov K, Marchuk A, Oblaukhov K, Shadrin M. Hardware/Software Solution for Low Power Evaluation of Tsunami Danger. Journal of Low Power Electronics and Applications. 2022; 12(1):6. https://0-doi-org.brum.beds.ac.uk/10.3390/jlpea12010006
Chicago/Turabian StyleLavrentiev, Mikhail, Konstantin Lysakov, Andrey Marchuk, Konstantin Oblaukhov, and Mikhail Shadrin. 2022. "Hardware/Software Solution for Low Power Evaluation of Tsunami Danger" Journal of Low Power Electronics and Applications 12, no. 1: 6. https://0-doi-org.brum.beds.ac.uk/10.3390/jlpea12010006