
A Novel Single-Switch Single-Stage LED Driver with Power Factor Correction and Current Balancing Capability





Abstract
:1. Introduction
2. Circuit Configuration and Operation Mode Analysis
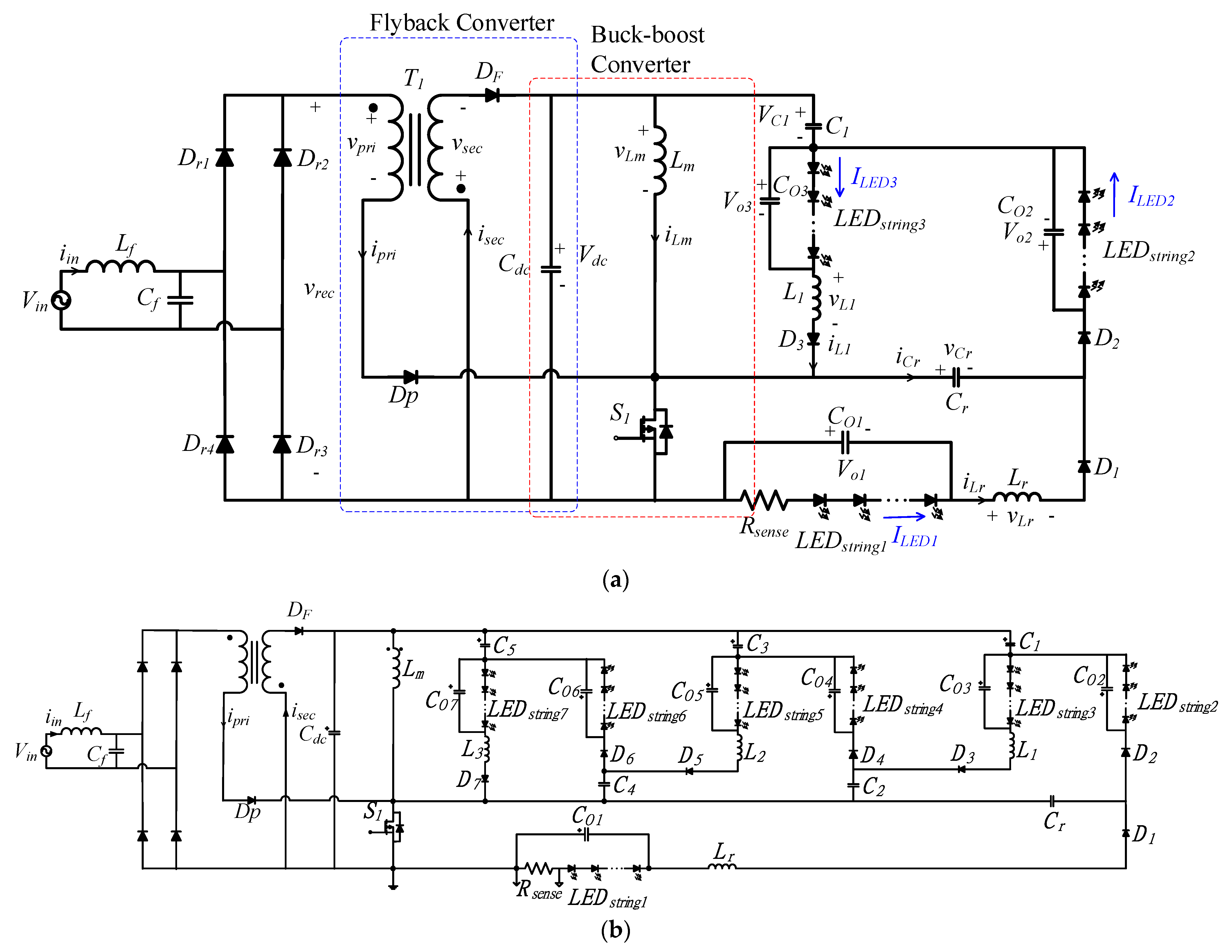
2.1. Circuit Configuration
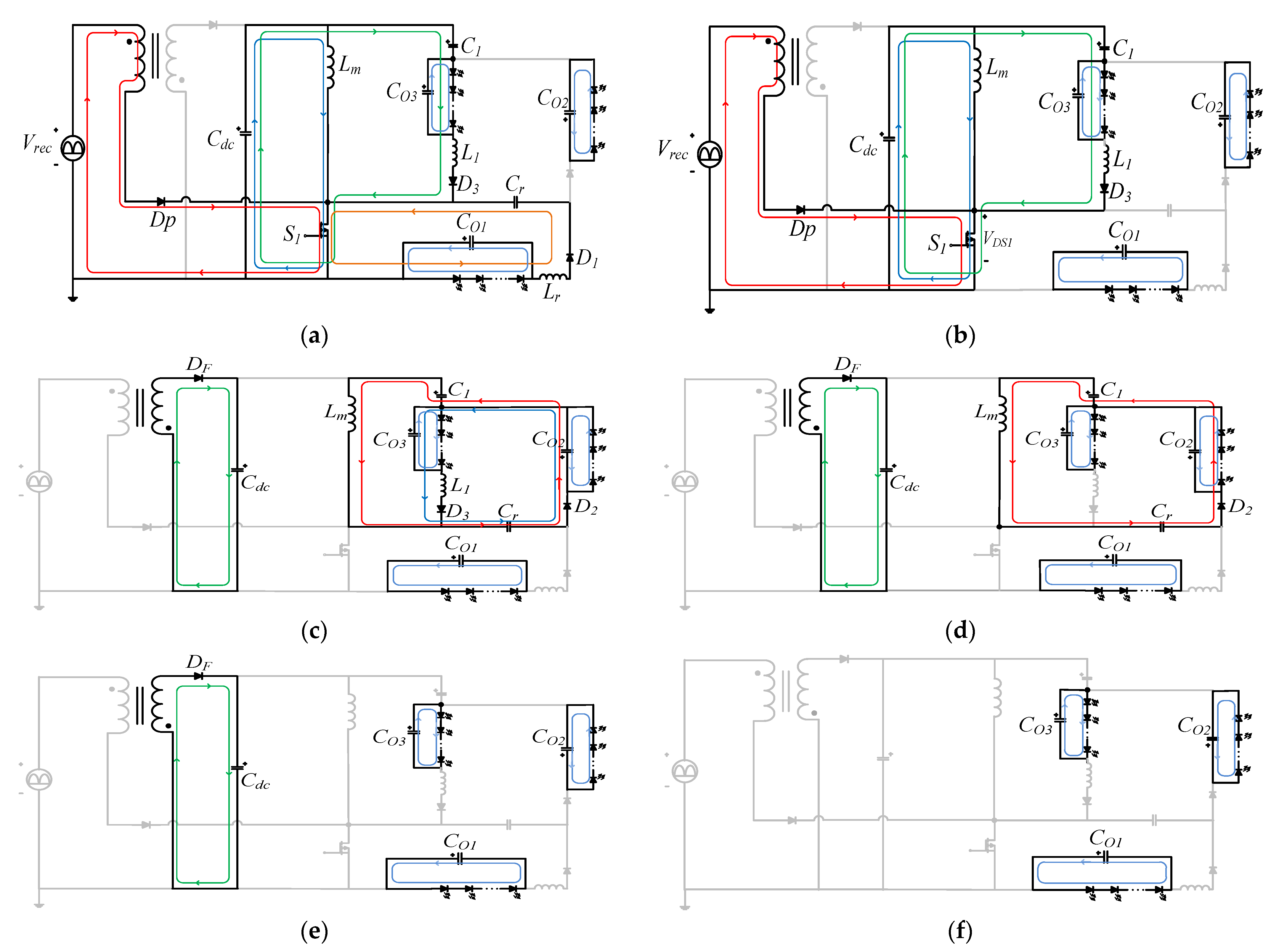
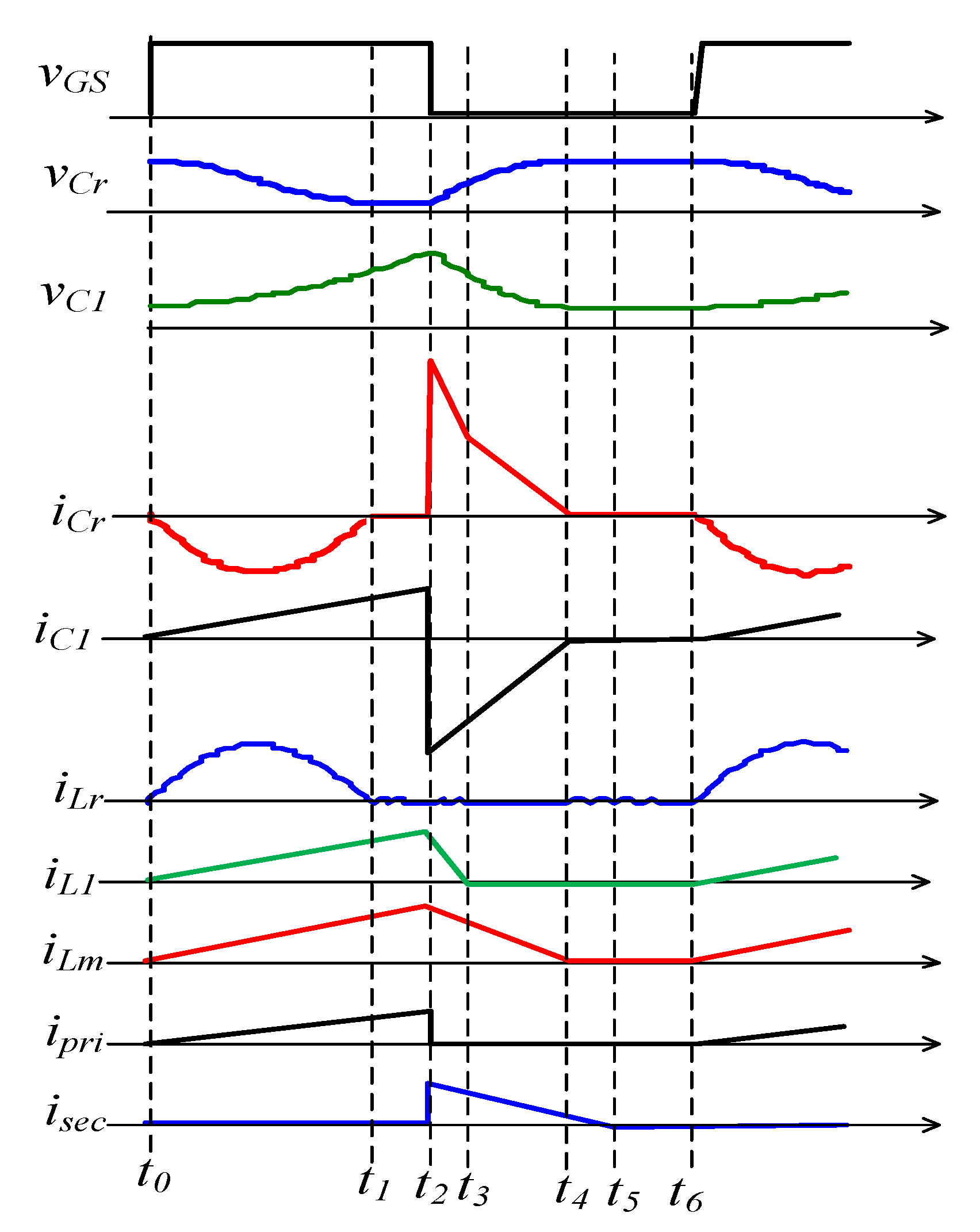
2.2. Operation Mode Analysis
- All components are ideal.
- The capacitors Cdc, C1, Co1, Co2, and Co3 are large enough, and the voltages across these capacitors (Vdc, VC1, Vo1, Vo2, and Vo3) can all be regarded as constant values.
- The input voltage is an ideal sinewave, vin(t) = Vmsin(ωt), where Vm represents the amplitude of the input voltage, and ω = 2πfL represents the angular frequency.
- The switching frequency fs of the active switch is much higher than the input voltage frequency fL (fs >> fL).
2.2.1. Operation Mode I ()
2.2.2. Operation Mode II ()
2.2.3. Operation Mode III ()
2.2.4. Operation Mode IV ()
2.2.5. Operation Mode V ()
2.2.6. Operation Mode VI ()
3. Analysis on Current Balance and Power Factor Correction
3.1. Principle of Current Balance
3.2. Flyback PFC Circuit
4. Design Equations of Circuit Parameters
4.1. Design Equations of the Flyback Converter
4.2. Design Equations of the Current Balancing Circuit
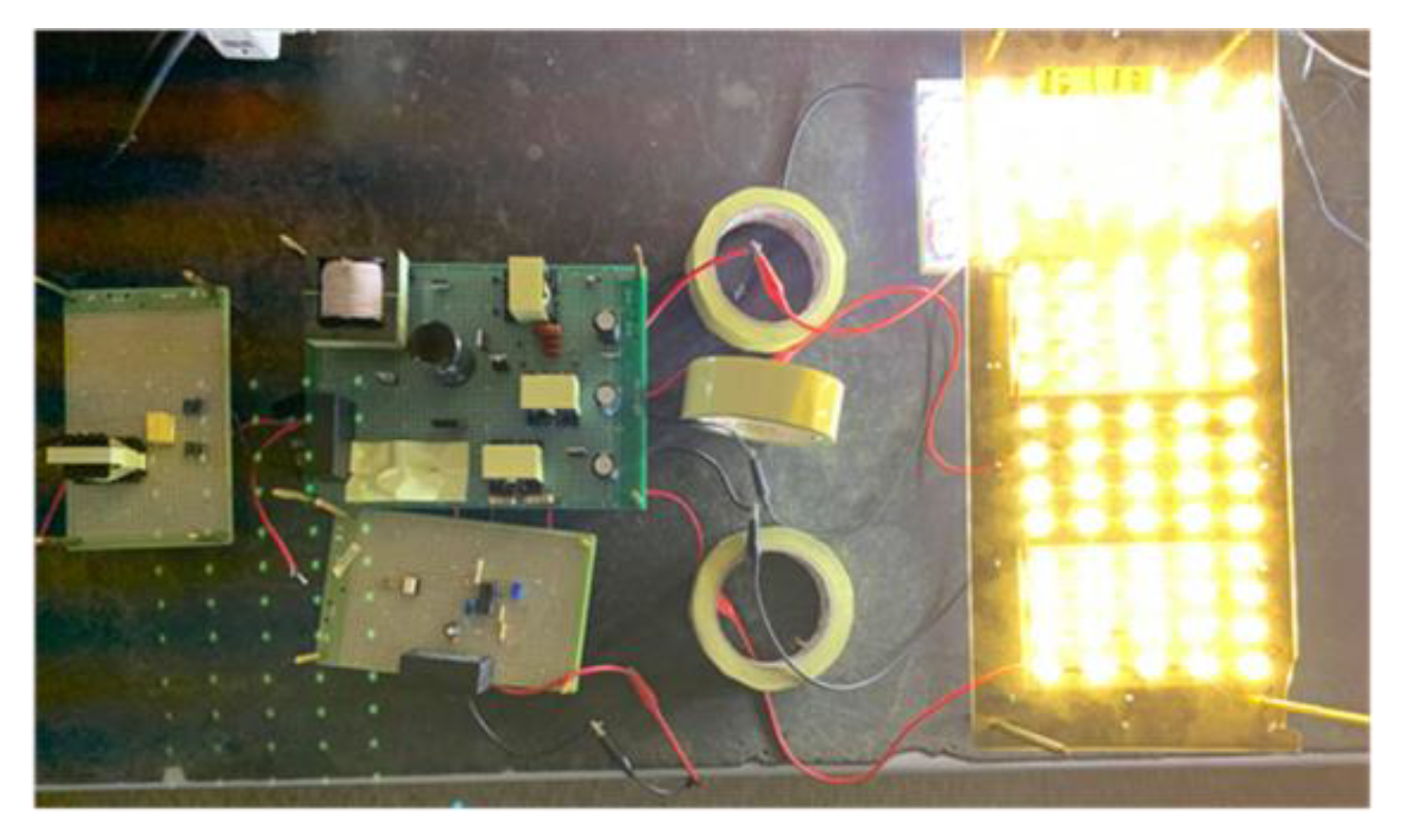
5. Experimental Results
5.1. Component Parameters Design
5.1.1. Primary and Secondary Inductances of Transformer T1
5.1.2. Inductance and Capacitance of the Resonant Circuit
5.1.3. Inductances of L1 and Lm
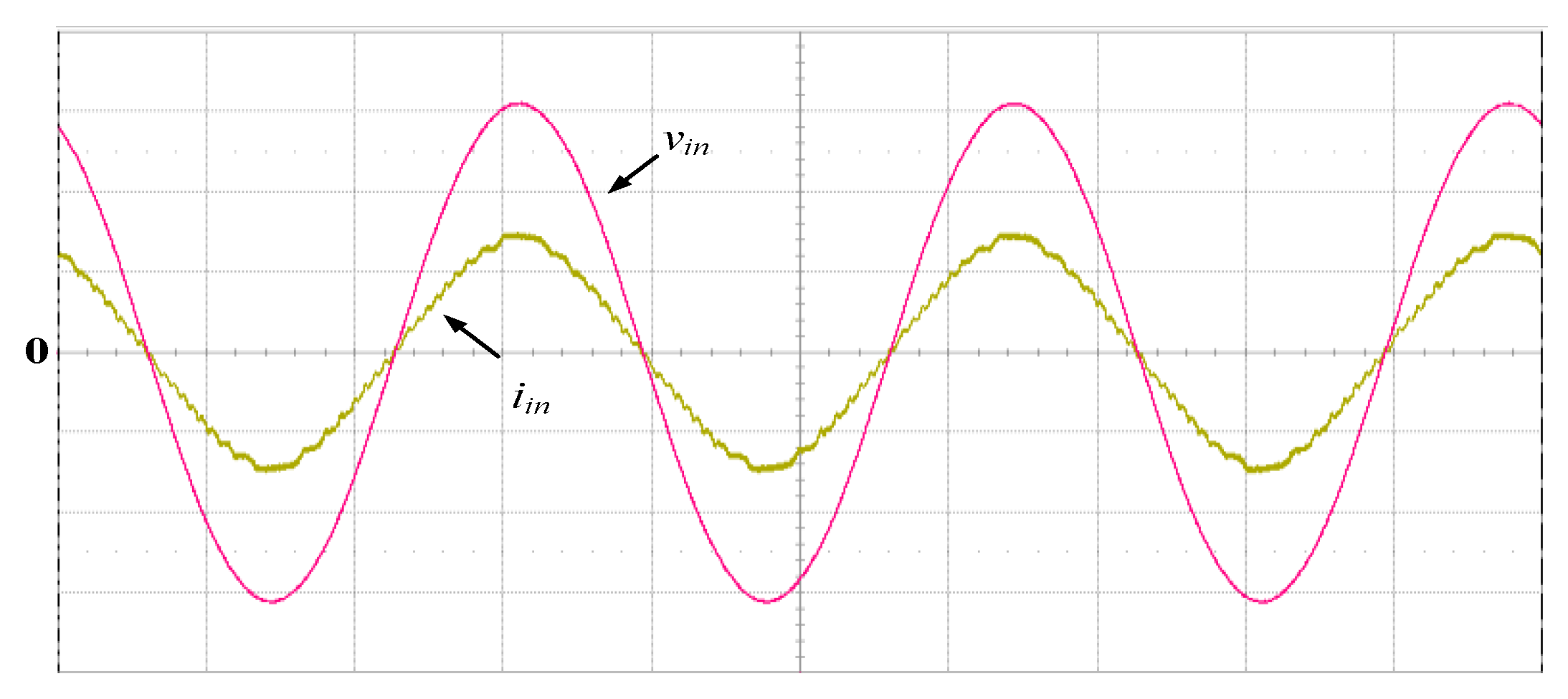
5.2. Control Circuit and Experimental Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Moon, S.C.; Koo, G.B.; Moon, G.W. Dimming-feedback control method for TRIAC dimmable LED drivers. IEEE Trans. Ind. Electron. 2015, 62, 960–965. [Google Scholar] [CrossRef]
- Lee, E.S.; Choi, B.H.; Nguyen, D.T.; Jang, G.C.; Rim, C.T. Versatile LED drivers for various electronic ballasts by variable switched capacitor. IEEE Trans. Power Electron. 2016, 31, 1489–1502. [Google Scholar] [CrossRef]
- Alonso, J.M.; Gacio, D.; Calleja, A.J.; Ribas, J.; Corominas, E.L. A study on led retrofit solutions for low-voltage halogen cycle lamps. IEEE Trans. Ind. Appl. 2012, 48, 1673–1682. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, Q.; Xu, J.; Lei, Y.; Wang, P.; Zhu, Y. High-efficiency resonant LED backlight driver with passive current balancing and dimming. IEEE Trans. Ind. Electron. 2018, 65, 5476–5486. [Google Scholar] [CrossRef]
- Zhao, C.; Xie, X.; Liu, S. Multioutput LED drivers with precise passive current balancing. IEEE Trans. Power Electron. 2013, 28, 1438–1448. [Google Scholar] [CrossRef]
- Li, S.N.; Zhong, W.X.; Chen, W.; Hui, S.Y.R. Novel self-configurable current-mirror techniques for reducing current imbalance in parallel light-emitting diode (LED) strings. IEEE Trans. Power Electron. 2012, 27, 2153–2162. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Hui, S.Y.R. Self-configurable current-mirror circuit with short-circuit and open-circuit fault tolerance for balancing parallel light-emitting diode (LED) string current. IEEE Trans. Power Electron. 2014, 29, 5498–5550. [Google Scholar] [CrossRef]
- Qu, X.; Wong, S.C.; Tse, C.K. Noncascading structure for electronic ballast design for multiple LED lamps with independent brightness control. IEEE Trans. Power Electron. 2010, 25, 331–340. [Google Scholar]
- Hu, U.; Jovanovic, M.M. LED driver with self-adaptive drive voltage. IEEE Trans. Power Electron. 2008, 23, 3116–3125. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Y.; Ma, D. A SIMO parallel-string driver IC for dimmable LED backlighting with local bus voltage optimization and single time-shared regulation loop. IEEE Trans. Power Electron. 2012, 27, 452–462. [Google Scholar] [CrossRef]
- Yang, W.H.; Yang, H.A.; Huang, C.J.; Chen, K.H. A high-efficiency single-inductor multiple-output buck-type LED driver with average current correction technique. IEEE Trans. Power Electron. 2018, 33, 3375–3385. [Google Scholar] [CrossRef]
- Qu, X.; Wong, S.C.; Tse, C.K. An improved LCLC current-source-output multistring LED driver with capacitive current balancing. IEEE Trans. Power Electron. 2015, 30, 5783–5791. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, J.; Qian, Z. Analysis and design considerations of LLCC resonant multioutput DC/DC LED driver with charge balancing and exchanging of secondary series resonant capacitors. IEEE Trans. Power Electron. 2015, 30, 780–789. [Google Scholar] [CrossRef]
- Choi, S.; Kim, T. Symmetric current balancing circuit for LED backlight with dimming. IEEE Trans. Ind. Electron. 2012, 59, 1698–1707. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J.; Wu, X. A capacitor-isolated LED driver with inherent current balance capability. IEEE Trans. Ind. Electron. 2012, 59, 1708–1716. [Google Scholar] [CrossRef]
- Alonso, J.M.; Viña, J.; Vaquero, D.G.; Martínez, G.; Osório, R. Analysis and design of the integrated double buck-boost converter as a high-power-factor driver for power-LED lamps. IEEE Trans. Ind. Electron. 2012, 59, 1689–1697. [Google Scholar] [CrossRef]
- Li, Y.C.; Chen, C.L. A novel primary-side regulation scheme for single-stage high-power-factor AC–DC LED driving circuit. IEEE Trans. Ind. Electron. 2013, 60, 4978–4986. [Google Scholar] [CrossRef]
- Wang, Y.; Guan, Y.; Ren, K.; Wang, W.; Xu, D. A single-stage LED driver based on BCM boost circuit and LLC converter for street lighting system. IEEE Trans. Ind. Electron. 2015, 62, 5446–5457. [Google Scholar] [CrossRef]
- Cheng, C.A.; Cheng, H.L.; Chung, T.Y. A novel single-stage high-power-factor LED street-lighting driver with coupled inductors. IEEE Trans. Ind. Appl. 2014, 50, 2821–2826. [Google Scholar] [CrossRef]
- Erickson, R.; Madigan, M.; Singer, S. Design of a simple high-power-factor rectifier based on the flyback converter. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Los Angeles, CA, USA, 11 March 1990; pp. 792–801. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input voltage vin | 110 V ± 10% (rms), 60 Hz |
| Output power Po | 90 W (30 W × 3) |
| LED voltage VLED | 91.5 V (3.05 V × 30) |
| LED voltage ILED | 0.328 A |
| Equivalent LED Resistance RLED | 279 Ω |
| Switching frequency fs | 50 kHz |
| Duty ratio D | 0.4 |
| The low-pass inductance Lf | 1.89 mH |
| The low-pass capacitance Cf | 0.47 μF |
| Dc-link capacitance Cdc | 330 μF |
| Output capacitance Co1~Co3 | 47 μF |
| Capacitance C1 | 10 μF |
| Capacitance Cr | 35.2 μF |
| Inductance Lp, Ls | 194.7 µH |
| Inductances Lm, L1, Lr | 326 µH, 278 µH, 170 µH |
| Active switches S1 | SPW47N60C3 |
| Bridge-rectifier diodes Dr1~Dr4 | MUR460 |
| Diodes Dp, D, Db, D1~D3 | C3D10060 A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Y.-H.; Cheng, H.-L.; Cheng, C.-A.; Chang, Y.-N.; Wu, Z.-X. A Novel Single-Switch Single-Stage LED Driver with Power Factor Correction and Current Balancing Capability. Electronics 2021, 10, 1340. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10111340
Yan Y-H, Cheng H-L, Cheng C-A, Chang Y-N, Wu Z-X. A Novel Single-Switch Single-Stage LED Driver with Power Factor Correction and Current Balancing Capability. Electronics. 2021; 10(11):1340. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10111340
Chicago/Turabian StyleYan, Yih-Her, Hung-Liang Cheng, Chun-An Cheng, Yong-Nong Chang, and Zong-Xun Wu. 2021. "A Novel Single-Switch Single-Stage LED Driver with Power Factor Correction and Current Balancing Capability" Electronics 10, no. 11: 1340. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10111340