1. Introduction
Batteries fulfill a vital function in many stationary applications, so any problem in a cell or module that could destabilize its energy storage capacity represents a significant expense. For instance, solutions based on the manual measurements of the state of health of the energy storage system involves high maintenance costs. If the review frequency is low, failures are not detected in time, the battery’s life expectancy is not maximized, and end-user has added expenses. In this framework, the integration of sensors at the cell level and the development and optimization of a Battery Management System (BMS) are important for creating batteries that can meet these requirements. The monitoring of the battery by the implementation of smart models and algorithms to the BMS permits the continuous collection of historical data, including the State of Charge (SoC) and State of Health (SoH), thereby minimizing battery failure. In addition, it can be identified continuously. This monitoring action would also reduce the maintenance costs associated with on-site visits. For example, the biggest challenge in lead-acid battery management is determining the health status of the battery throughout its life while optimizing operational and maintenance costs [
1,
2,
3,
4,
5,
6,
7].
As the requirements of batteries increase in demand and complexity, the ability to understand, control, and predict battery performance becomes more important. It seems axiomatic that the identification and characterization of battery electrochemical models is crucial to predicting battery life and to controlling and understanding the battery itself. These models are based on interpreting electrochemical behavior with respect to a wide range of battery properties (performance, life span, and especially safety), and in this Electrochemical Impedance Spectroscopy (
EIS) plays a remarkable role [
6].
In summary, integration of smart
EIS sensing and the extraction of key parameters produces a detailed understanding and evaluation of the battery, develops better energy management strategies, and enables smart SoC and SoH identification to improve performance. The review presented by Unguren et al. [
8] includes a valuable updated comparison of the different types of models that have been used, mainly for electric mobility applications. This work focuses on the dynamic identification of electrochemical model parameters, as suggested by Kwiecien et al. [
6]. The work of Lin et al. [
9] includes an overview of the latest work in electric mobility, but there is still room to improve battery management algorithms, despite the enormous efforts made. Regarding possible improvements in the battery management system, thermal management is also important, as shown by the study by Jilte et al. [
10]. Possibly one of the positive messages of this report is the importance of collecting as much experimental data as possible to implement incremental improvements in the models. Indeed, the more relevant models, which range from simple one-dimensional models to highly complex multi-dimensional coupled ones, as suggested by Olarte et al. [
11], are be made by in operando electrochemical data, as in the case of this work.
The process of determining the SoC and SoH of batteries is challenging. Several imaginative monitoring approaches have been introduced that have generated a number of patents covering different technologies [
12]. Over many years, this kind of research paid attention mainly to lead-acid technology to make it more accessible to customers. A number of advances in assessing the behavior of cell resistance upon cycling in Pb-acid batteries was made possible by the introduction of Electrochemical Impedance Spectroscopy (
EIS), which evaluates the battery’s SoC and SoH by combining a set of direct measurements, namely, resistance, current pulse quantities,
EIS, coulomb counting, and open circuit voltage-based approximations.
Numerous studies have reported different ways to estimate SoC and SoH variables, which can be divided into different categories: direct measurements, electrical and electrochemical models, and adaptive and machine learning methods [
13,
14,
15,
16]. For example, Chaturvedi et al. reviewed different algorithms for SoC and SoH indication and commercially available Battery Management Systems and concluded that SoC and SoH identification in vehicle batteries was still not accurate enough [
13].
Among direct measurements, discharge test capacities can only be done at the beginning of a battery’s working life or for intermediate measurements of its SoH. However, this type of method, even if precise, cannot be incorporated into an intelligent diagnostic detection system by itself, as explained by Lukic et al. [
17].
Some electrochemical models are based on coulomb counting, which can be very accurate but only if the initial input is valid, and for this high accuracy current sensors are required [
18,
19]. Open Circuit Voltage (OCV) measurement is used in lead-acid, lithium-ion or zinc/bromine batteries, which are based on the relation of the OCV to the SoC. The OCV is usually measured in off-line conditions, but it could be conducted on-line if the OCV is deduced from terminal voltage real values or suitable models.
Another method for making real-time predictions by interpreting parameters from the spectra is Electrochemical Impedance Spectroscopy (
EIS). It is difficult to implement the electrochemical model because it depends on a specific technology [
18], but it is expected to be very accurate. The last electrochemical model is Kalman filters, which can be implemented in all battery systems, although implementation entails a high level of difficulty.
The difficulty in determining the parameters of the
EIS spectrum lies in the development of an adequate and advanced algorithm that allows both automatic and reliable identification. There are different techniques for identifying system parameters, and the common laboratory approach consists of measuring the impedance spectrum of a cell’s frequency domain by means of a single sine-sweep signal. Then, the ECM parameters are fitted to the frequency domain. Among the authors who have developed work related to this topic, is Al Nazer et al., who presented a two-step method, although initial expert background to define the initial parameter values was necessary [
20]. Nasser-Eddine et al. presented a two-step identification method combining chronopotentiometry and
EIS [
21]. Gonzalez et al. used a self-adaptive differential evolution algorithm for metal coating systems that had only been tested with experimental inputs [
22]. On the other hand, the study of Alavi et al. [
23] paid attention to the estimation of ECM parameters directly from data gathered in the time domain. That technique could have practical applications for parameter estimation in battery-powered vehicles. In addition, Zou et al. [
24] presented a critical synopsis of fractional-order techniques for dealing with lead-acid batteries, lithium-ion batteries, and supercapacitors. In the study of Ramos et al. [
25], an improvement in the gene expression programming of specific details of implementation was presented with pre-embedded knowledge to improve the efficiency of identifying circuits in impedance spectroscopy. On the other hand, a convolutional neural network (CNN) was used by Chun et al. [
26] to predict or prevent problems by observing the inner states of lithium-ion batteries.
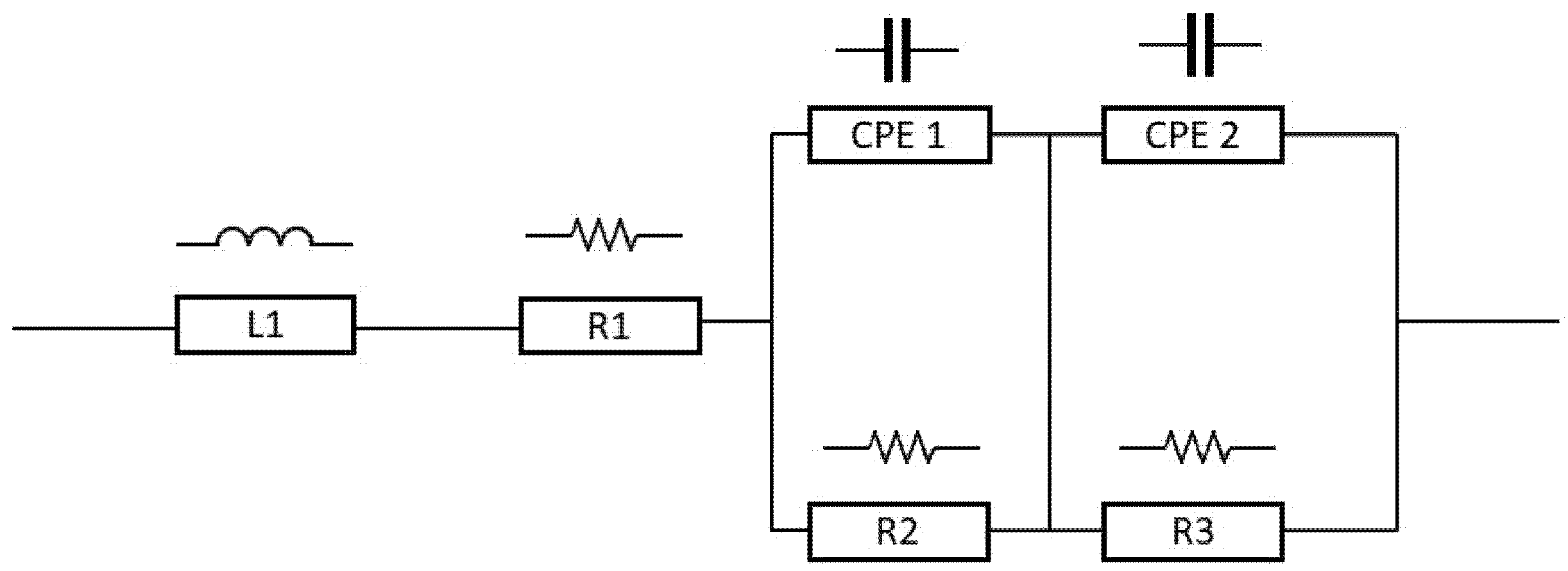
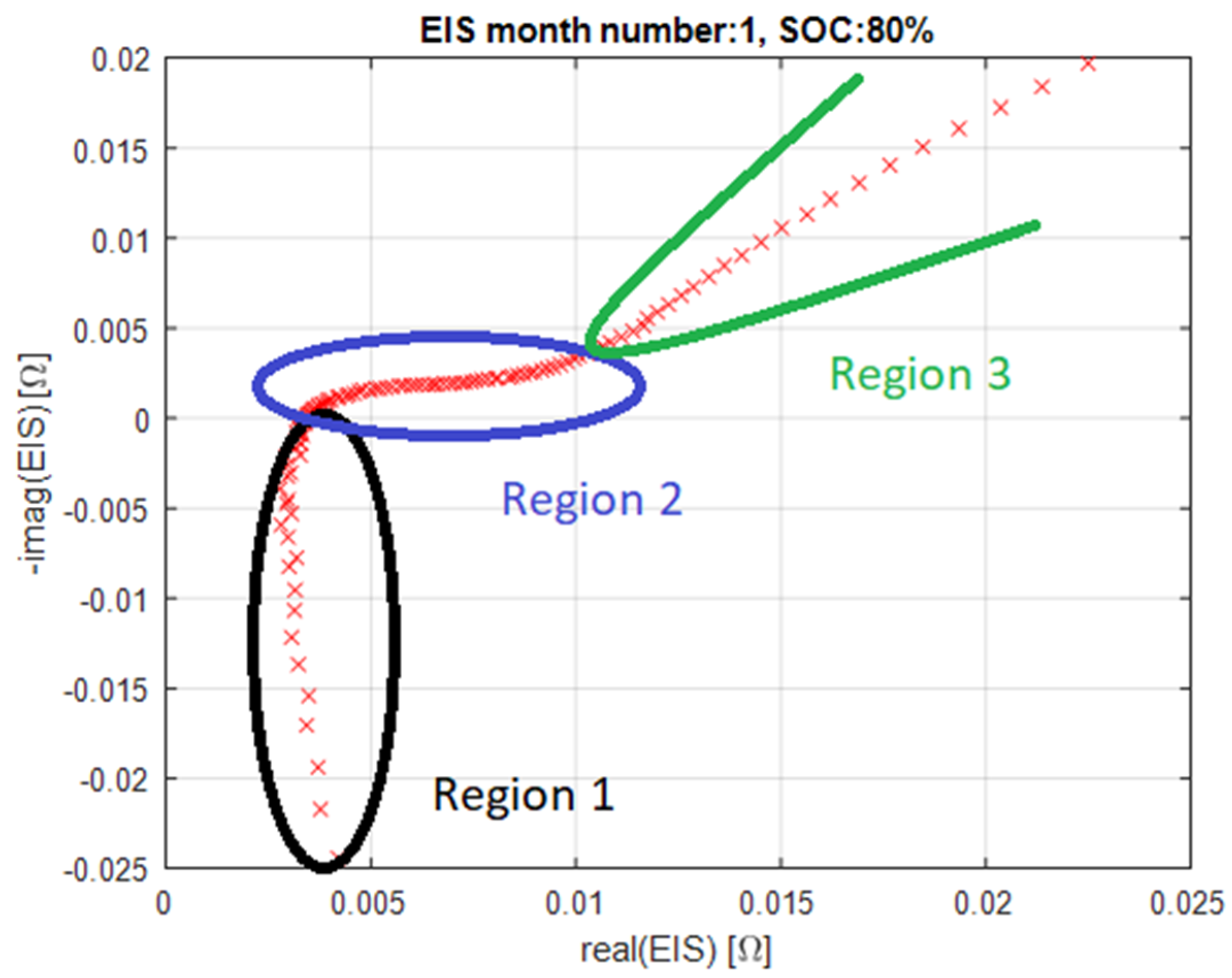
In this paper, direct measurements based on the analysis of
EIS impedance spectra were used to determine the electric equivalent circuit (EEC) parameters. Changes or variations in value based on a correlation with experimental
EIS data from aging batteries corresponding to known states of failure or degradation allowed the fast mapping to SoC and SoH in combination with additional historical operational data of the battery system. Regarding the
EIS impedance measurement, different authors made comments. According to Baccouche et al. [
19], this method is very reliable as it presents high accuracy; however, it could be very time consuming and hard to implement. According to Rivera-Barrera et al. [
15], this estimation method is only suitable for identical charging conditions. According to Chang [
14], impedance measurements are very versatile in that they give information about many parameters, such as SoC, battery degradation, and failure modes.
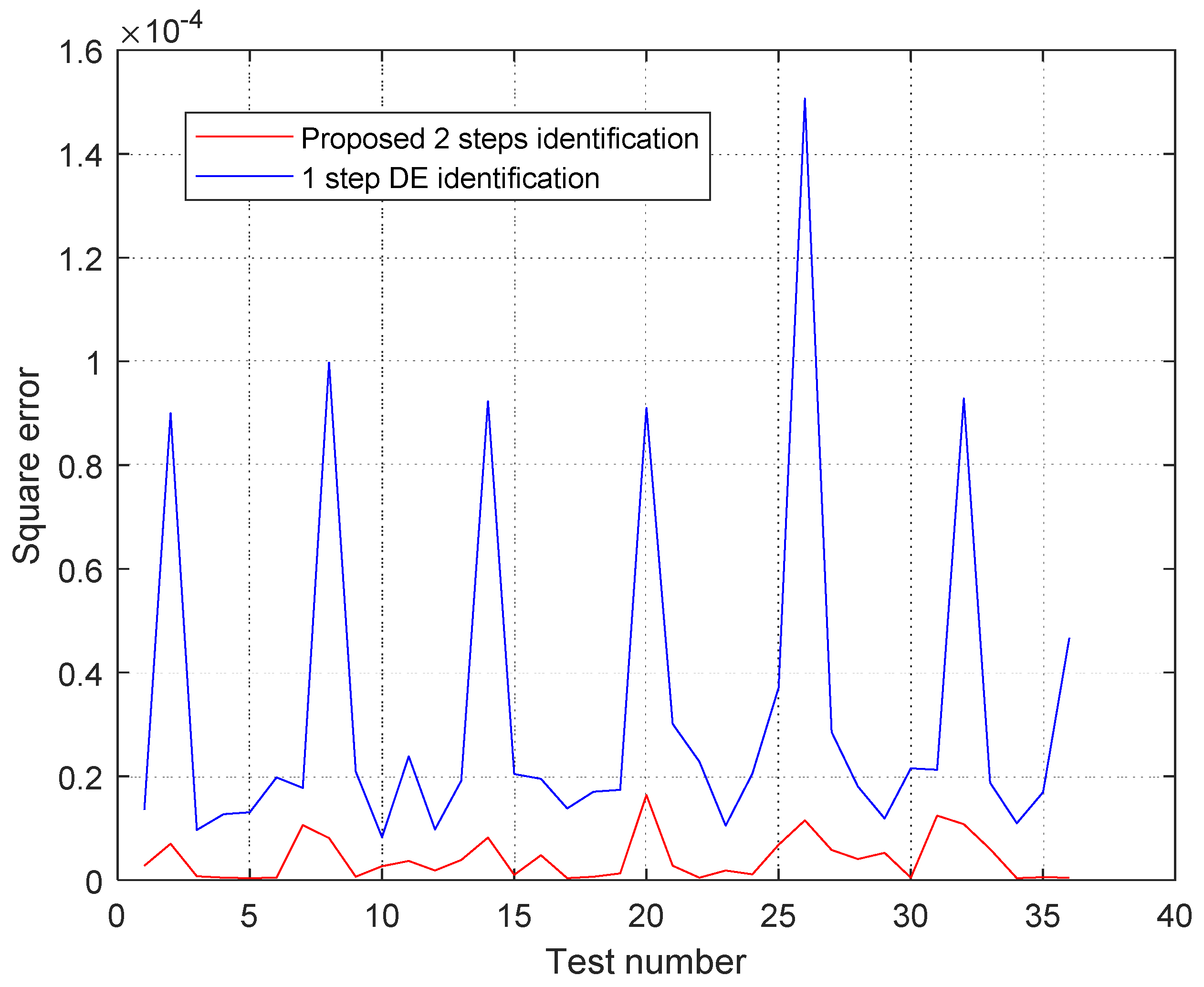
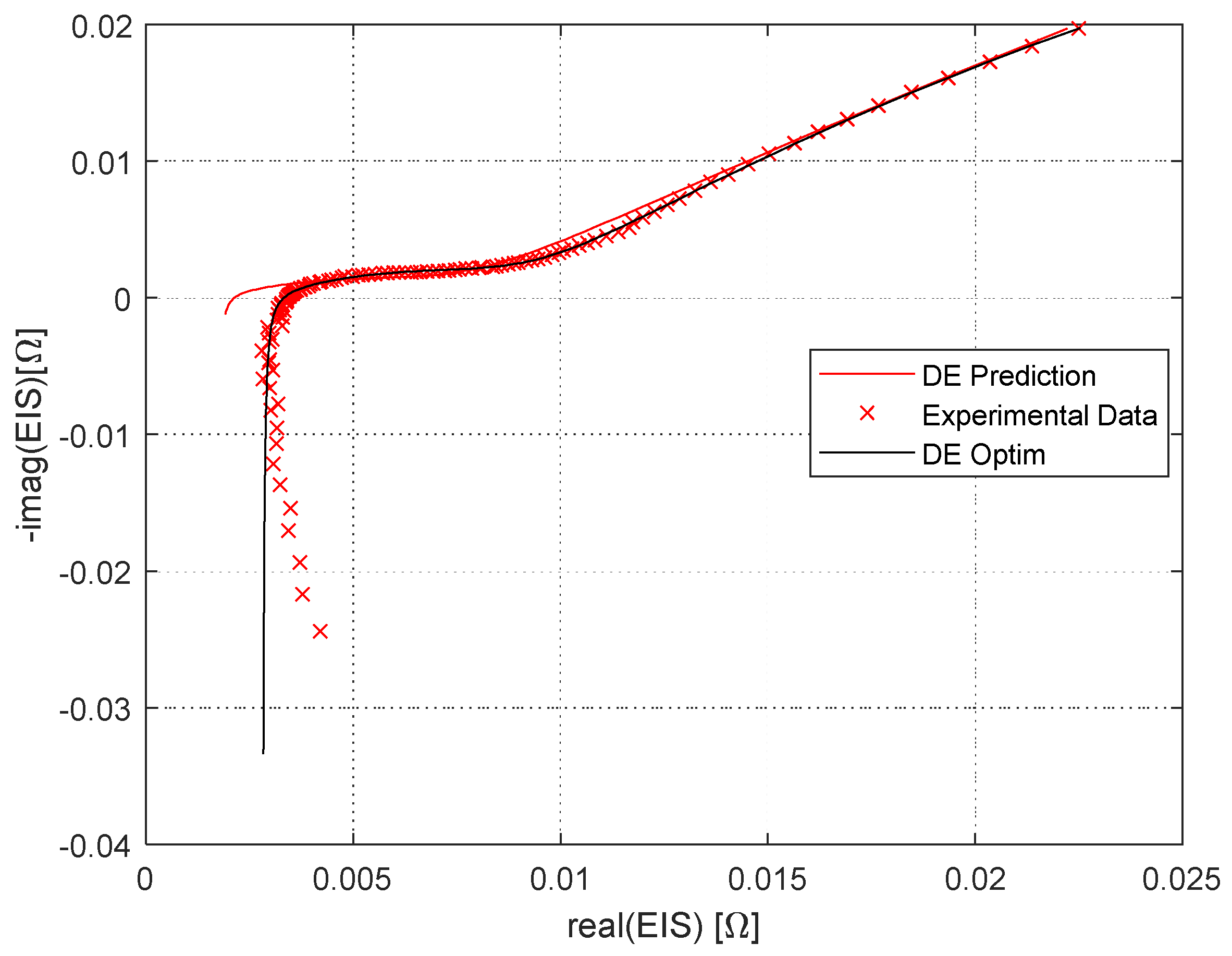
The main innovation of the present work consists of proposing a new model to improve the certainty of EEC parameter estimation from
EIS. The process of identification and use of parameters is interactive, which allows for the integration of more experimental variables. As important as developing an efficient and highly accurate algorithm of battery EEC parameters may be, it must also be implemented economically in hardware integrated into an advanced Battery Management System (BMS). A valuable part of the work to be done is inspired by the guidelines defined by the European Commission [
12], which shares the objective of this work, i.e., the development of economical and efficient sensors. In this manner, this work has directed efforts to implement a computationally efficient yet robust algorithm that can be used in a low-cost device. With the implementation of the present algorithm, lead-acid batteries may become zero-maintenance because the adjusted predictions of the remaining useful life (RUL) and historical data records would allow continuous improvement that would improve overall performance, cycling strategies, battery safety and operation, and maintenance costs.
The remainder of the manuscript is structured as follows:
Section 2 describes the aging data and the identification methods used to characterize battery impedance.
Section 3 presents the main results of the identification process setup and the set of identified parameters. Finally, the main conclusions and future directions are summarized in
Section 4.



 and
and 




{kind=link}
{kind=link}
{kind=link}
{kind=link}