A Modified Chaotic Binary Particle Swarm Optimization Scheme and Its Application in Face-Iris Multimodal Biometric Identification



Abstract
:1. Introduction
- (1)
- Noise interferences. Due to the changes of illumination, sound, experimental environment and acquisition mode, noise is always introduced.
- (2)
- Theoretical upper limitation. The differences in the same biometric among different individuals may be very small, which will cause great difficulties for identification [20].
- (3)
- Being easy to be stolen. For example, the face is always exposed to the open environment for a long time.As a result, it is easy to be stolen and to be used by criminals [21].
- (1)
- Higher system reliability. Multimodal technology increases the complementary information in the identification process by integrating multiple biometrics.It can improve the fault tolerance of the system and reduce the impact of noise.
- (2)
- Greater robustness. If a certain biometric is missing, the multimodal system can still identify the identity according to the other biometric.
- (3)
- Better anti-counterfeiting performance. Compared with forged unimodal biometrics features, it is more difficult to forge multiple modal features at the same time.
- (1)
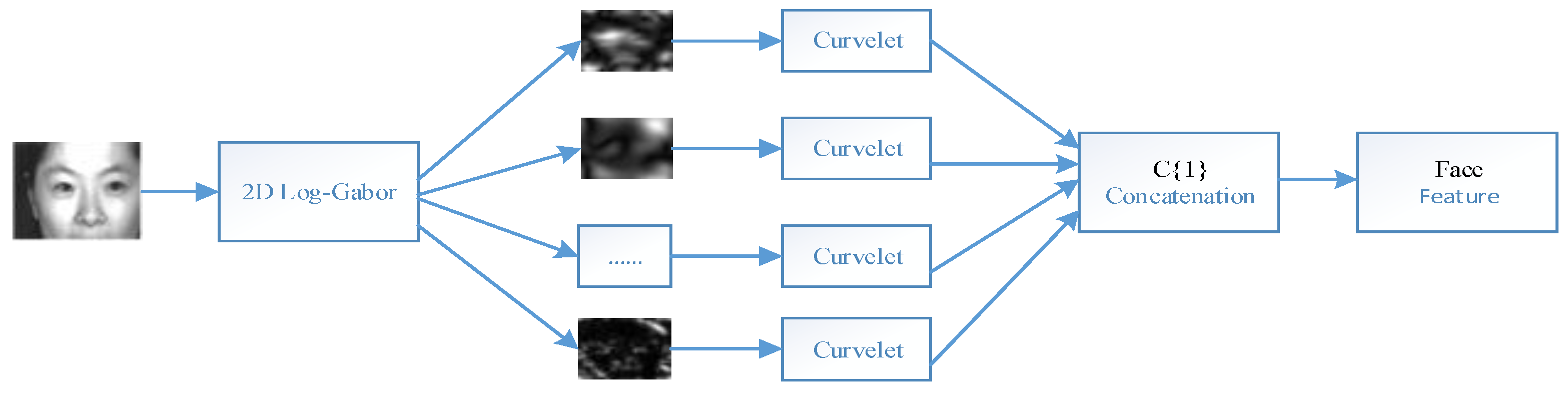
- A new face feature extraction algorithm is proposed. Firstly, 2D Log-Gabor filter is performed on the face region to generate some sub feature images; Secondly, Curvelet transform is performed on each sub feature image to extract features. Then, features of all sub features image are concatenated. The recognition rate of the algorithm is similar to the traditional 2D Log-Gabor + LBP feature extraction method, but the number of feature dimensions is greatly reduced.
- (2)
- Kernel extreme learning machine is used as a fitness function of the PSO. The performance of feature selection depends on the selection of the fitness function. In this paper, the classification accuracy of KELM for the selected feature is considered as the fitness function value.
- (3)
- A modified chaotic binary particle swarm optimization (MCBPSO) algorithm is proposed. Firstly, the particle swarms are initialized by chaotic binary sequences. Secondly, the position of Gbest after each iteration is varied by chaotic binary sequences, so as to realize chaotic local search and avoid falling into the local best.
2. Related Work
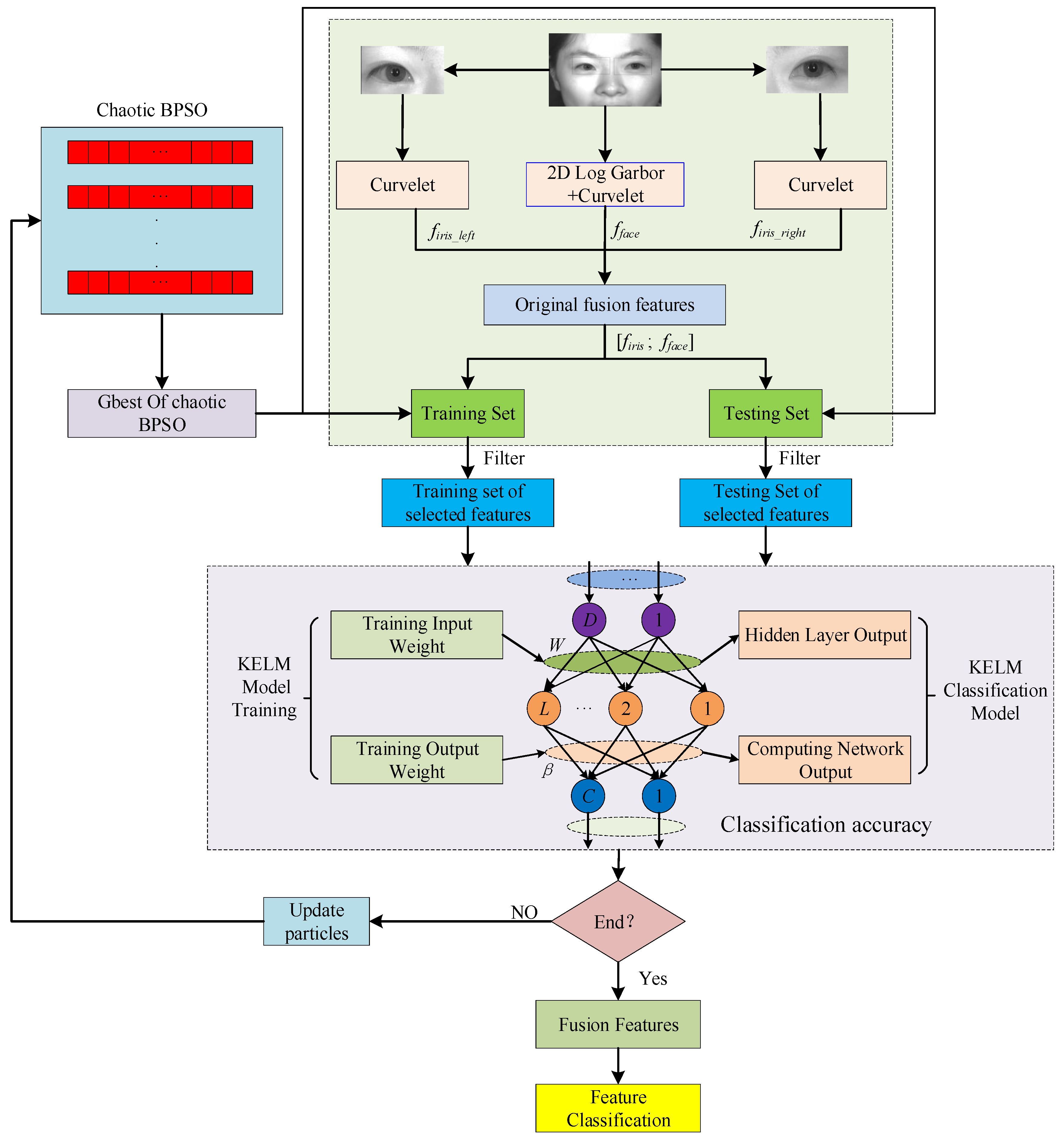
3. Proposed Multimodal Biometric System
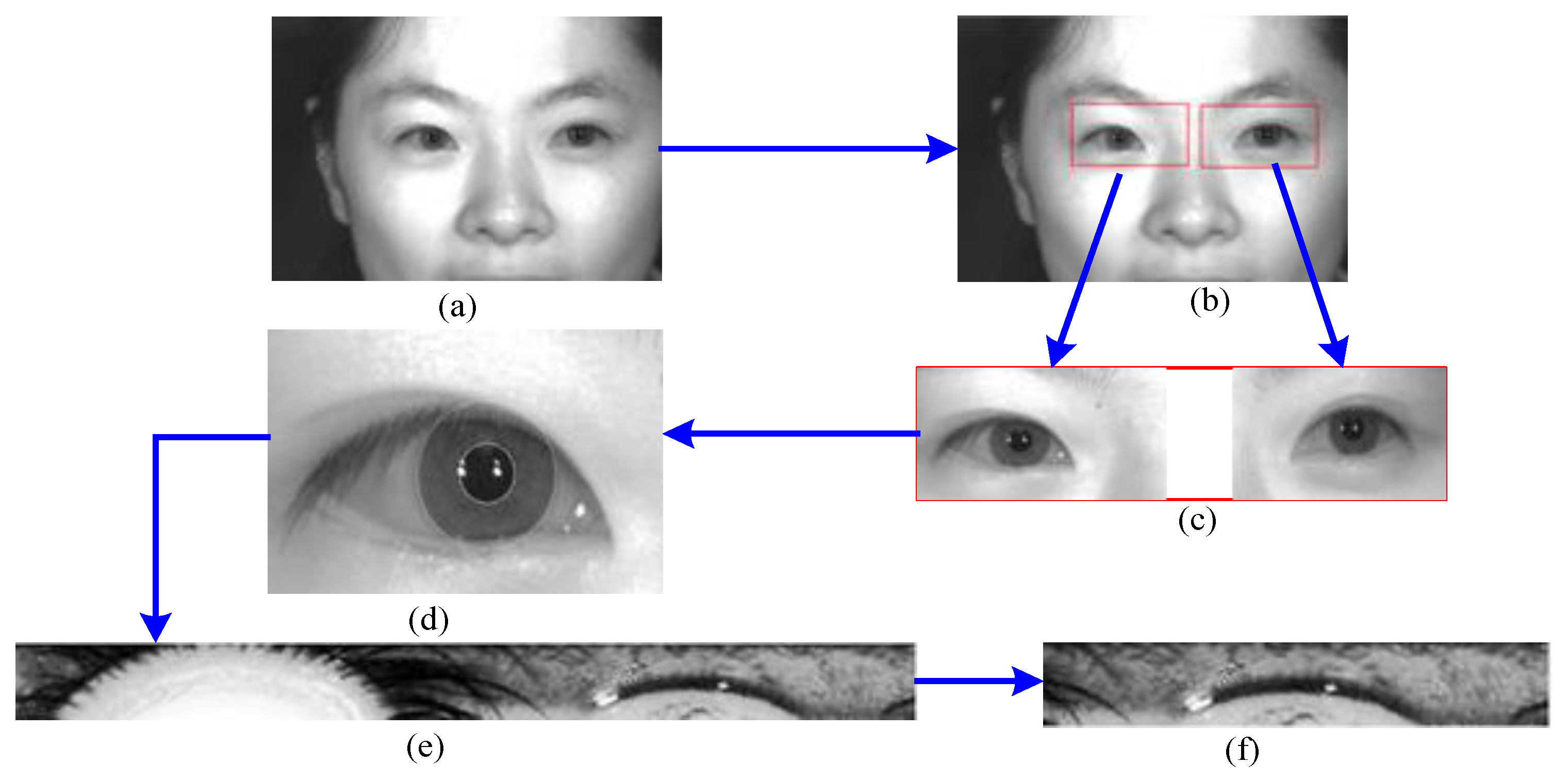
3.1. Iris Feature Extraction
3.1.1. Preprocessing
3.1.2. Feature Extraction Algorithm
3.2. Face Feature Extraction
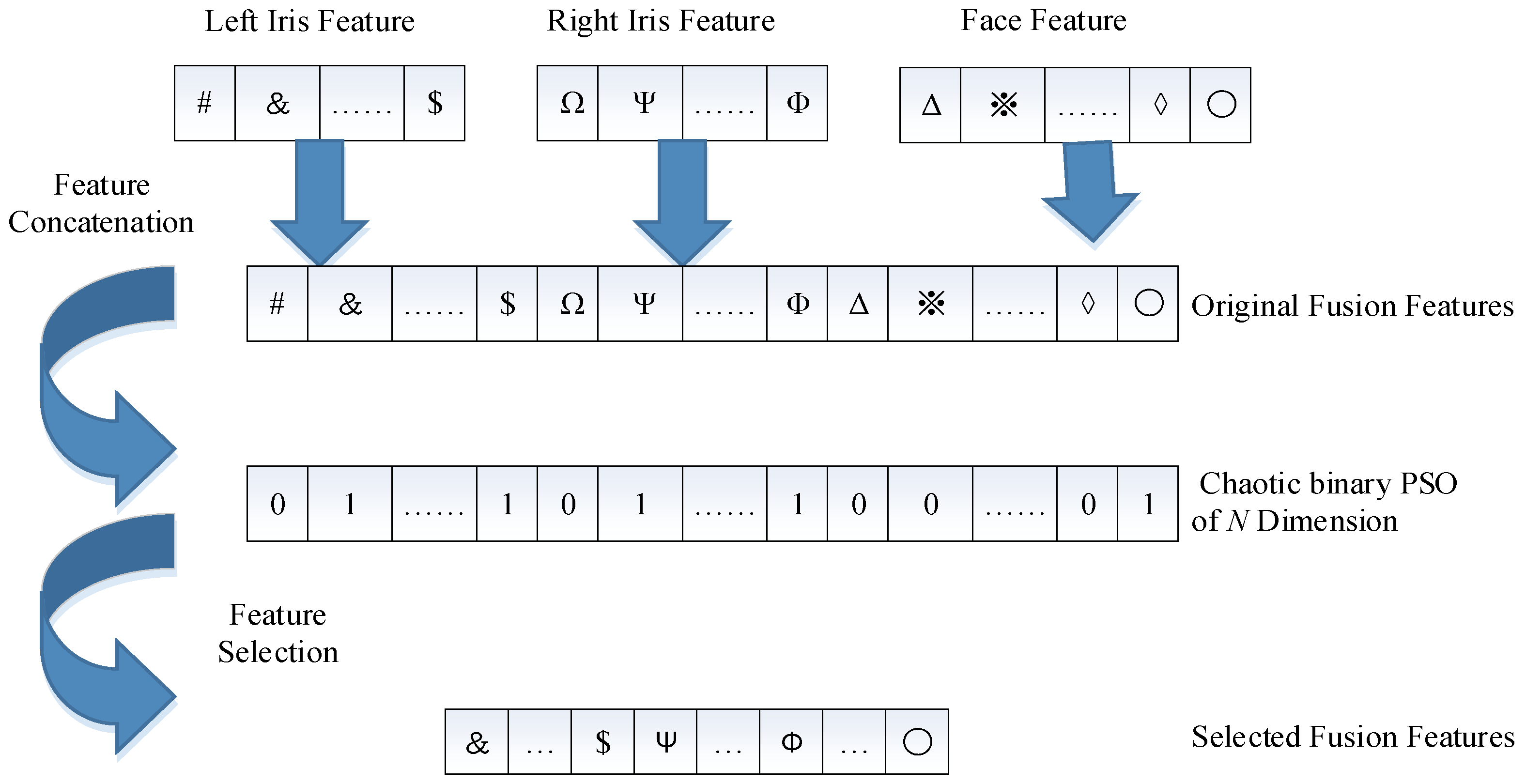
3.3. Feature Fusion Strategy of Iris and Face
3.3.1. Kernel Extreme Learning Machine
3.3.2. The MCBPSO Algorithm
| Algorithm 1 Update the position and velocity of particles in the particle swarm algorithm. |
| while do update by Equations (9)–(12) created by . % was selected as fusion features if then % is the Fitness function % was acquired end if if then % was acquired end if end while |
| Algorithm 2 Select fusion features. |
| Generating 20 N-dimensional binary chaotic sequences for j = 1 to 20 do % is modified by the logical operation And % Calculate the fitness value of the new particle if then end if end for |
3.3.3. Weight and Parameter Setting
4. Experimental Results and Analysis
4.1. Iris and Face Multimode Dataset
4.2. Experiments on Face System
4.3. Experiments on Iris
4.4. Experiments on Face-Iris Multimodal System
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jain, A.K.; Ross, A.; Pankanti, S. Biometrics: A tool for information security. IEEE Trans. Inf. Forensics Secur. 2006, 1, 125–143. [Google Scholar] [CrossRef] [Green Version]
- Best-Rowden, L.; Jain, A. Longitudinal Study of Automatic Face Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 148–162. [Google Scholar] [CrossRef]
- He, R.; Tan, T.; Davis, L.; Sun, Z. Learning structured ordinal measures for video based face recognition. Pattern Recognit. 2018, 75, 4–14. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Shen, Y.; Bergmann, N.; Hu, W. Sensor-Assisted Multi-View Face Recognition System on Smart Glass. IEEE Trans. Mob. Comput. 2018, 17, 197–210. [Google Scholar] [CrossRef]
- Oh, B.S.; Toh, K.; Teoh, A.B.J.; Lin, Z. An Analytic Gabor Feedforward Network for Single-Sample and Pose-Invariant Face Recognition. IEEE Trans. Image Process. 2018, 27, 2791–2805. [Google Scholar] [CrossRef]
- Cao, K.; Jain, A.K. Automated Latent Fingerprint Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 788–800. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gu, S.; Feng, J.; Lu, J.; Zhou, J. Efficient Rectification of Distorted Fingerprints. IEEE Trans. Inf. Forensics Secur. 2018, 13, 156–169. [Google Scholar] [CrossRef]
- Jain, A.K.; Arora, S.S.; Cao, K.; Best-Rowden, L.; Bhatnagar, A. Fingerprint Recognition of Young Children. IEEE Trans. Inf. Forensics Secur. 2017, 12, 1501–1514. [Google Scholar] [CrossRef]
- Zhang, L.; Li, L.; Yang, A.; Shen, Y.; Yang, M. Towards contactless palmprint recognition:A novel device, a new benchmark, and a collaborative representation based identification approach. Pattern Recognit. 2017, 69, 199–212. [Google Scholar] [CrossRef]
- Jia, W.; Zhang, B.; Lu, J.; Zhu, Y.; Zhao, Y.; Zuo, W.; Ling, H. Palmprint Recognition Based on Complete Direction Representation. IEEE Trans. Image Process. 2017, 26, 4483–4498. [Google Scholar] [CrossRef]
- Hsieh, S.; Li, Y.; Wang, W.; Tien, C. A Novel Anti-Spoofing Solution for Iris Recognition Toward Cosmetic Contact Lens Attack Using Spectral ICA Analysis. Sensors 2018, 18, 795. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Llano, E.G.; García-Vázquez, M.S.; Colores-Vargas, J.M.; Zamudio-Fuentes, L.M.; Ramírez-Acosta, A.A. Optimized robust multi-sensor scheme for simultaneous video and image iris recognition. Pattern Recognit. Lett. 2018, 101, 44–51. [Google Scholar] [CrossRef]
- Olanrewaju, L.; Oyebiyi, O.; Misra, S.; Maskeliunas, R.; Damasevicius, R. Secure ear biometrics using circular kernel principal component analysis, Chebyshev transform hashing and Bose–Chaudhuri–Hocquenghem error-correcting codes. Signal Image Video Process. 2020, 14, 847–855. [Google Scholar] [CrossRef]
- Robertas, D.; Rytis, M.; Egidijus, K.; Marcin, W. Combining Cryptography with EEG Biometrics. Comput. Intell. Neurosci. 2018, 2018, 1–11. [Google Scholar]
- Tolosana, R.; Vera-Rodríguez, R.; Fierrez, J.; Ortega-Garcia, J. Exploring Recurrent Neural Networks for On-Line Handwritten Signature Biometrics. IEEE Access 2018, 6, 5128–5138. [Google Scholar] [CrossRef]
- Alpar, O. Online signature verification by continuous wavelet transformation of speed signals. Expert Syst. Appl. 2018, 104, 33–42. [Google Scholar] [CrossRef]
- Zou, Q.; Ni, L.; Wang, Q.; Li, Q.; Wang, S. Robust Gait Recognition by Integrating Inertial and RGBD Sensors. IEEE Trans. Cybern. 2018, 48, 1136–1150. [Google Scholar] [CrossRef] [Green Version]
- Abdelaziz, A.H. Comparing Fusion Models for DNN-Based Audiovisual Continuous Speech Recognition. IEEE/ACM Trans. Audio Speech Lang. Process. 2018, 26, 475–484. [Google Scholar] [CrossRef]
- Lu, Y.; Yan, J.; Gu, K. Review on Automatic Lip Reading Techniques. Int. J. Pattern Recognit. Artif. Intell. 2018, 32, 1856007. [Google Scholar] [CrossRef]
- Ammour, B.; Bouden, T.; Boubchir, L. Face-Iris Multimodal Biometric System Based on Hybrid Level Fusion. In Proceedings of the 2018 41st International Conference on Telecommunications and Signal Processing (TSP), Athens, Greece, 4–6 July 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Matin, A.W.; Mahmud, F.; Ahmed, T.; Sabbir Ejaz, M.S. Weighted score level fusion of iris and face to identify an individual. In Proceedings of the 2017 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’s Bazar, Bangladesh, 16–18 February 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Ross, A.; Jain, A.K. Multimodal biometrics: An overview. In Proceedings of the 2004 12th European Signal Processing Conference, Vienna, Austria, 6–10 September 2004; pp. 1221–1224. [Google Scholar] [CrossRef]
- Omid, S.; Maryam, E. Optimal Face-Iris Multimodal Fusion Scheme. Symmetry 2016, 8, 48. [Google Scholar]
- Moi, S.H.; Asmuni, H.; Hassan, R.; Othman, R.M. Multimodal biometrics: Weighted score level fusion based on non-ideal iris and face images. Expert Syst. Appl. 2014, 41, 5390–5404. [Google Scholar] [CrossRef]
- Haghighat, M.; Abdel-Mottaleb, M.; Alhalabi, W. Discriminant Correlation Analysis: Real-Time Feature Level Fusion for Multimodal Biometric Recognition. IEEE Trans. Inf. Forensics Secur. 2016, 11, 1984–1996. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Zhang, X. Feature-level fusion of fingerprint and finger-vein for personal identification. Pattern Recognit. Lett. 2012, 33, 623–628. [Google Scholar] [CrossRef]
- Shekhar, S.; Patel, V.; Nasrabadi, N.; Chellappa, R. Joint Sparse Representation for Robust Multimodal Biometrics Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 113–126. [Google Scholar] [CrossRef]
- Chin, Y.J.; Ong, T.S.; Teoh, A.B.J.; Goh, M.O.M. Integrated biometrics template protection technique based on fingerprint and palmprint feature-level fusion. Inf. Fusion 2014, 18, 161–174. [Google Scholar] [CrossRef]
- Raghavendra, R.; Dorizzi, B.; Rao, A.; Kumar, G.H. Designing efficient fusion schemes for multimodal biometric systems using face and palmprint. Pattern Recognit. 2011, 44, 1076–1088. [Google Scholar] [CrossRef]
- He, S.; Banerjee, S.; Sun, K. Can derivative determine the dynamics of fractional-order chaotic system. Chaos Solitons Fractals 2018, 115, 14–22. [Google Scholar] [CrossRef]
- Song, L.; Huang, J.; Liang, X.; Yang, S.X.; Hu, W.; Tang, D. An Intelligent Multi-Sensor Variable Spray System with Chaotic Optimization and Adaptive Fuzzy Control. Sensors 2020, 20, 2954. [Google Scholar] [CrossRef]
- Cao, Y.; Wu, M. A Novel RPL Algorithm Based on Chaotic Genetic Algorithm. Sensors 2018, 18, 3647. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Yang, G.; Zhang, B. FW-PSO Algorithm to Enhance the Invulnerability of Industrial Wireless Sensor Networks Topology. Sensors 2020, 20, 1114. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ammour, B.; Boubchir, L.; Bouden, T.; Ramdani, M. Face-Iris Multimodal Biometric Identification System. Electronics 2020, 9, 85. [Google Scholar] [CrossRef] [Green Version]
- Bouzouina, Y.; Hamami, L. Multimodal biometric: Iris and face recognition based on feature selection of iris with GA and scores level fusion with SVM. In Proceedings of the International Conference on Bio-engineering for Smart Technologies, Paris, France, 30 August–1 September 2017; pp. 1–7. [Google Scholar]
- Eskandari, M.; Toygar, Ö. Selection of optimized features and weights on face-iris fusion using distance images. Comput. Vis. Image Underst. 2015, 137, 63–75. [Google Scholar] [CrossRef]
- Huo, G.; Liu, Y.; Zhu, X.; Dong, H. Face–iris multimodal biometric scheme based on feature level fusion. J. Electron. Imaging 2015, 24, 063020. [Google Scholar] [CrossRef]
- Roy, K.; O’Connor, B.; Ahmad, F.; Kamel, M.S. Multibiometric System Using Level Set, Modified LBP and Random Forest. Int. J. Image Graph. 2014, 14, 1450013. [Google Scholar] [CrossRef]
- Eskandari, M.; Toygar, Ö. Fusion of face and iris biometrics using local and global feature extraction methods. Signal Image Video Process. 2014, 8, 995–1006. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, E.; Wang, S.; Ding, Q. Multimodal Biometric System Using Face-Iris Fusion Feature. J. Comput. 2011, 6, 931–938. [Google Scholar] [CrossRef] [Green Version]
- Rattani, A.; Tistarelli, M. Robust Multi-modal and Multi-unit Feature Level Fusion of Face and Iris Biometrics. In Proceedings of the International Conference on Biometrics ICB 2009: Advances in Biometrics, Alghero, Italy, 2–5 June 2009. [Google Scholar]
- Fu, L.; Xia, M.; Chen, L. Speaker independent emotion recognition based on SVM/HMMS fusion system. In Proceedings of the International Conference on Audio, Shanghai, China, 7–9 July 2008. [Google Scholar]
- Shi, L.; Lina, X.U.; Hao, Y. Application Research on the Multi-Model Fusion Forecast of Wind Speed. Plateau Meteorol. 2017, 14, 227–230. [Google Scholar]
- Baker, J.P.; Maurer, D.E. Fusing multimodal biometrics with quality estimates via a bayesian belief network. Pattern Recognit. 2008, 41, 821–832. [Google Scholar]
- Alatas, B.; Akin, E.; Ozer, A.B. Chaos embedded particle swarm optimization algorithms. Chaos Solitons Fractals 2009, 40, 1715–1734. [Google Scholar] [CrossRef]
- Li, P.; Xu, D.; Zhou, Z.; Lee, W.J.; Zhao, B. Stochastic Optimal Operation of Microgrid Based on Chaotic Binary Particle Swarm Optimization. IEEE Trans. Smart Grid 2017, 7, 66–73. [Google Scholar] [CrossRef]
- Lin, H.; Maolong, X.; Jun, S. An improved Quantum-Behaved Particle Swarm Optimization with Binary Encoding. Kongzhi Yu Juece/Control Decis. 2011, 25, 243–249. [Google Scholar] [CrossRef]
- Trujillo, L.; Olague, G.; Hammoud, R.; Hernandez, B. Automatic Feature Localization in Thermal Images for Facial Expression Recognition. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05)—Workshops, San Diego, CA, USA, 21–23 September 2005; p. 14. [Google Scholar] [CrossRef]
- Zhang, X.; Xiong, Q.; Xu, X. Iris Identification App Based on Andriod System. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 2229–2234. [Google Scholar]
- Candès, E.; Demanet, L.; Donoho, D.; Ying, L. Fast Discrete Curvelet Transforms. Multiscale Model. Simul. 2006, 5, 861–899. [Google Scholar] [CrossRef]
- Sun, J.; Lu, Z.; Zhou, L. Iris Recognition Using Curvelet Transform Based on Principal Component Analysis and Linear Discriminant Analysis. J. Inf. Hiding Multim. Signal Process. 2014, 5, 567–573. [Google Scholar]
- Huang, G.; Zhu, Q.Y.; Siew, C. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Huang, G. An Insight into Extreme Learning Machines: Random Neurons, Random Features and Kernels. Cogn. Comput. 2014, 6, 376–390. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. A discrete binary version of the particle swarm algorithm. In Proceedings of the 1997 IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation, Orlando, FL, USA, 12–15 October 1997; Volume 5, pp. 4104–4108. [Google Scholar]
- CASIA Iris Image Database. Available online: http://biometrics.idealtest.org/findDownloadDbByMode.do?mode=Iris (accessed on 16 June 2017).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Fusion Level/Classification Method | Multimodal Dataset | Feature Extraction Method |
|---|---|---|---|
| B. Ammour et al. (2020) [34] | Hybrid fusion level/fuzzy k-nearest neighbor(FK-NN) | Chimeric database [34] | Iris features are extracted by 2D Log-Gabor filter. Facial features are computed using singular spectrum analysis (SSA). |
| B. Ammour et al. (2018) [20] | Hybrid fusion level/Euclidean distance | CASIA Iris Distance database | Iris and face features are extracted by 2D Log-Gabor filter combined with SRKDA. |
| Y. Bouzouina et al. (2017) [35] | Match score level/Support vector machine(SVM) | Chimeric database | PCA and DCT are used for face feature. 1D log Gabor filtering and Zernike memomt are used for iris feature. Genetic algorithm (GA) is used to select features. |
| O. Sharifi et al. (2016) [23] | Match score level, feature level and decision level fusion/Manhattan distance | CASIA Iris Distance database | Iris and face features are extracted by 2D Log-Gabor filter. |
| M. Eskandari et al. (2015) [36] | Score level, feature level fusion/Weighted sum rule | CASIA Iris Distance database | Iris feature extraction algorithm is 1D Log-Gabor. Five local and global kinds of face features are extracted by subspace PCA, modular PCA and LBP. PSO was used to select features. |
| G. Huo et al. (2015) [37] | Feature level fusion/Support vector machine(SVM) | Chimeric database | Face and iris feature extraction algorithm are 2D Gabor filter. PCA method is used to reduce the dimension |
| K. Roy et al. (2014) [38] | Feature level fusion/Manhattan distance | Chimeric database | Modified local binary pattern (MLBP). Random Forest (RF) is proposed to select the optimal subset of features. |
| H.M. Sim et al. (2014) [24] | Match score level/Euclidean Distance for face, Hamming Distance for iris | Chimeric database | Face and iris features was extracted by eigenface and NeuWave Network respectively |
| M. Eskandari et al. (2014) [39] | Match score level/Weighted Sum Rule | Chimeric database | Face and iris features was extracted by LBP and subspace LDA respectively. |
| Z. Wang et al. (2011) [40] | Feature level fusion/Euclidean distance. | Chimeric database | Face features was extracted by eigenface, while iris features are based on Daugman’s algorithm. |
| A. Rattani et al. (2009) [41] | Feature level fusion/Euclidean distance. | Chimeric database | Compute the SIFT (Scale invariant feature transform) features from both biometric and spatial sampling method are used for feature selection. |
| Algorithm | Dimension of the Feature | 1 Pic | 2 Pic | 3 Pic | 4 Pic | 5 Pic |
|---|---|---|---|---|---|---|
| 2D Log-Gabor + LBP | 22,656 | 0.879 | 0.960 | 0.976 | 0.980 | 0.989 |
| 2D Log-Gabor + Curvelet | 5304 | 0.784 | 0.906 | 0.930 | 0.972 | 0.978 |
| Algorithm | Dimension of the Feature | 1 Pic | 2 Pic | 3 Pic | 4 Pic | 5 Pic |
|---|---|---|---|---|---|---|
| 2D Log-Gabor + LBP | 5664 | 0.60 | 0.738 | 0.786 | 0.802 | 0.864 |
| 2D Log-Gabor + Curvelet | 42,840 | 0.684 | 0.826 | 0.860 | 0.883 | 0.898 |
| Curvelet | 1785 | 0.670 | 0.799 | 0.846 | 0.857 | 0.882 |
| Algorithms | 2 Pic | 3 Pic | 4 Pic | 5 Pic |
|---|---|---|---|---|
| Traditional BPSO | 4422 | 4433 | 4465 | 4420 |
| Traditional QBPSO | 4524 | 4487 | 4457 | 4385 |
| Modified CBPSO | 1630 | 811 | 699 | 866 |
| Training Numbers | GAR (%) | FRR (%) | FAR (%) |
|---|---|---|---|
| 1 | 90.49 | 9.51 | 0.07 |
| 2 | 96.40 | 3.6 | 0.02 |
| 3 | 97.78 | 2.22 | 0.01 |
| 4 | 98.89 | 1.11 | 0.0037 |
| 5 | 99.78 | 0.22 | 0.003 |
| Fusion Method | GAR (%) | FRR (%) | FAR (%) | Time Cost (s) |
|---|---|---|---|---|
| Traditional BPSO | 99.11 | 0.89 | 0.62 | 0.064 |
| Traditional QBPSO | 99.33 | 0.67 | 0.75 | 0.063 |
| Modified CBPSO | 99.78 | 0.22 | 0.003 | 0.016 |
| Authors | Fusion Method | GAR (%) | FAR (%) |
|---|---|---|---|
| M. Eskandari and O. Toygar [36] (2015) | score level and feature level fusion | 94.44 | 0.01 |
| O. Sharifi and M. Eskandari et al. [23] (2016) | score level, feature level and decision level fusion | 98.93 | 0.01 |
| B. Ammour et al. [20] (2018) | hybrid level of fusion | 99.5 | 0.06 |
| Proposed method | feature Level fusion | 99.78 | 0.003 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, Q.; Zhang, X.; Xu, X.; He, S. A Modified Chaotic Binary Particle Swarm Optimization Scheme and Its Application in Face-Iris Multimodal Biometric Identification. Electronics 2021, 10, 217. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10020217
Xiong Q, Zhang X, Xu X, He S. A Modified Chaotic Binary Particle Swarm Optimization Scheme and Its Application in Face-Iris Multimodal Biometric Identification. Electronics. 2021; 10(2):217. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10020217
Chicago/Turabian StyleXiong, Qi, Xinman Zhang, Xuebin Xu, and Shaobo He. 2021. "A Modified Chaotic Binary Particle Swarm Optimization Scheme and Its Application in Face-Iris Multimodal Biometric Identification" Electronics 10, no. 2: 217. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10020217