
A Comprehensive Investigation of the Properties of a Five-Phase Induction Motor Operating in Hazardous States in Various Connections of Stator Windings


Abstract
:1. Introduction
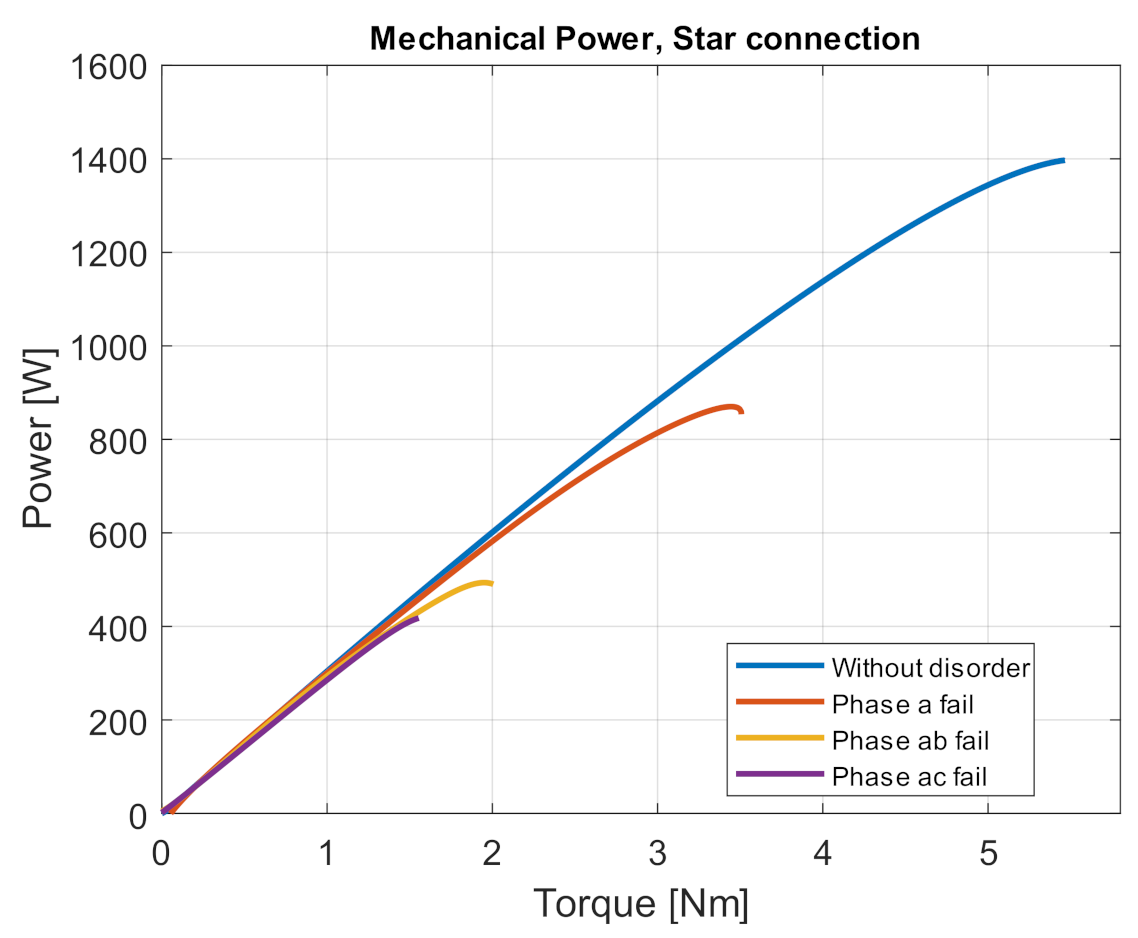
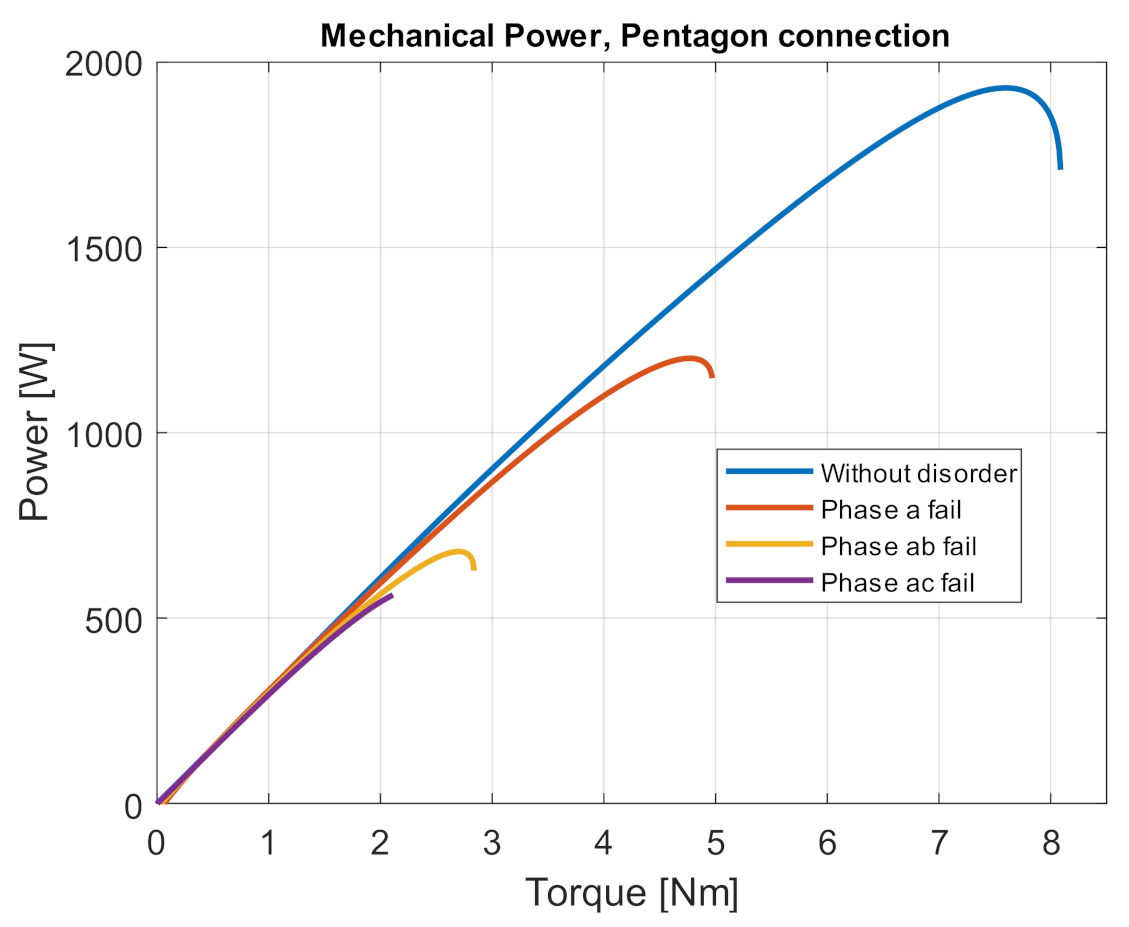
- Failure of one phase
- Failure of two adjacent, consecutive phases
- Failure of two non-adjacent phases
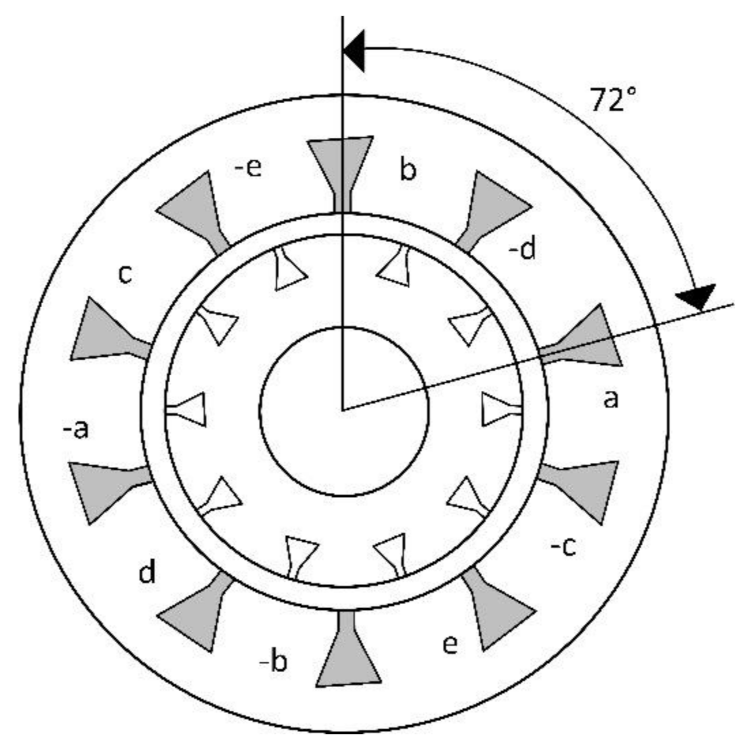
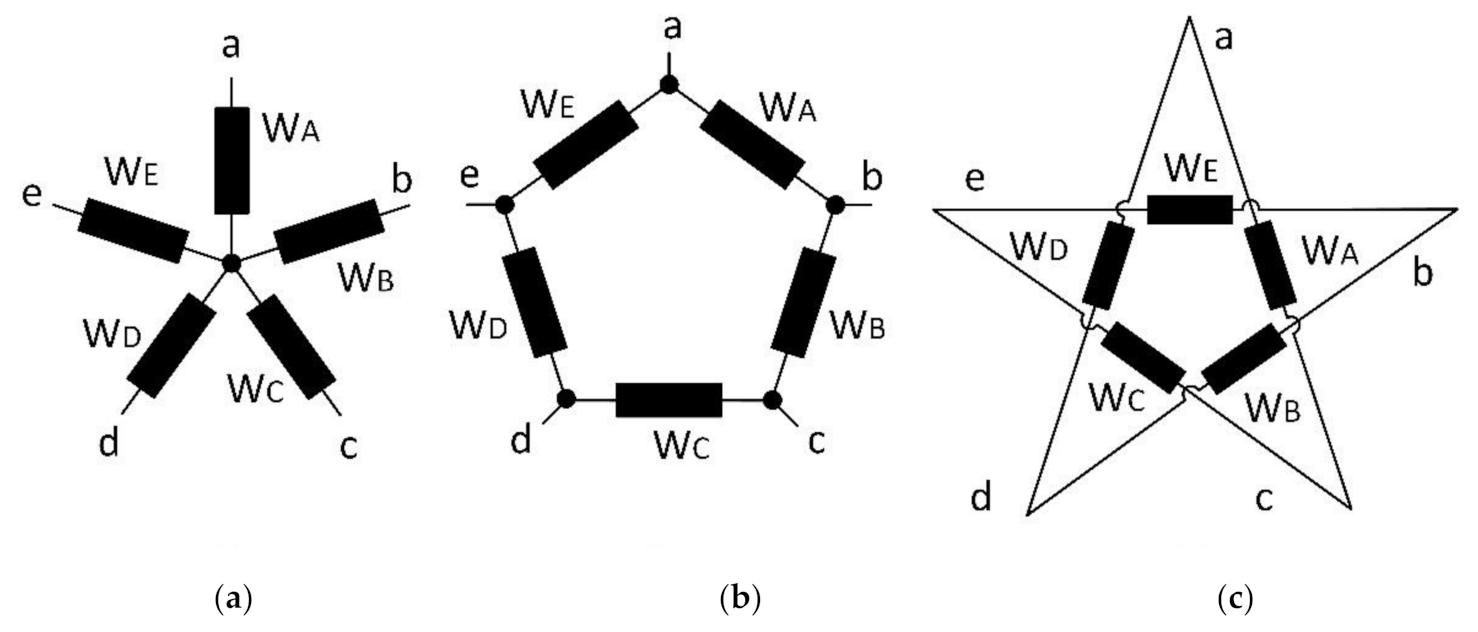
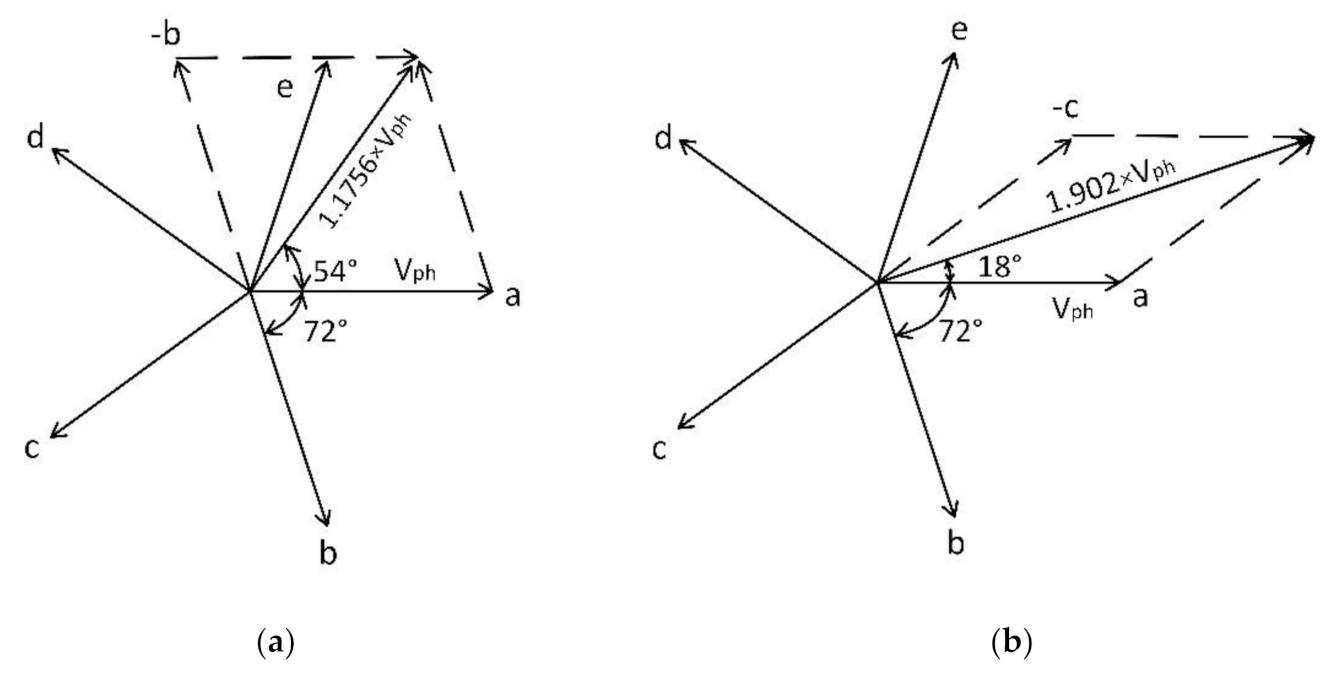
2. Theory of Five-Phase Induction Motor
- m1 is the number of stator winding phases (-)
- U1 is phase voltage (V)
- I1 is phase current (A)
- cosφ is power factor (-)
- R2′/s is the total active rotor resistance (Ω)
- is leakage reactance of the rotor winding converted to a stator (Ω)
- Xr1 is stator leakage reactance (Ω)
- R1 is the stator winding resistance (Ω)
- is the resistance of rotor converted to stator (Ω)
- p is the number of pole pairs (-)
- s is the motor slip (-)
- T is the motor torque (Nm)
- Ω is the angular velocity of the rotor (rad × s−1)
- n is the motor speed (rpm)
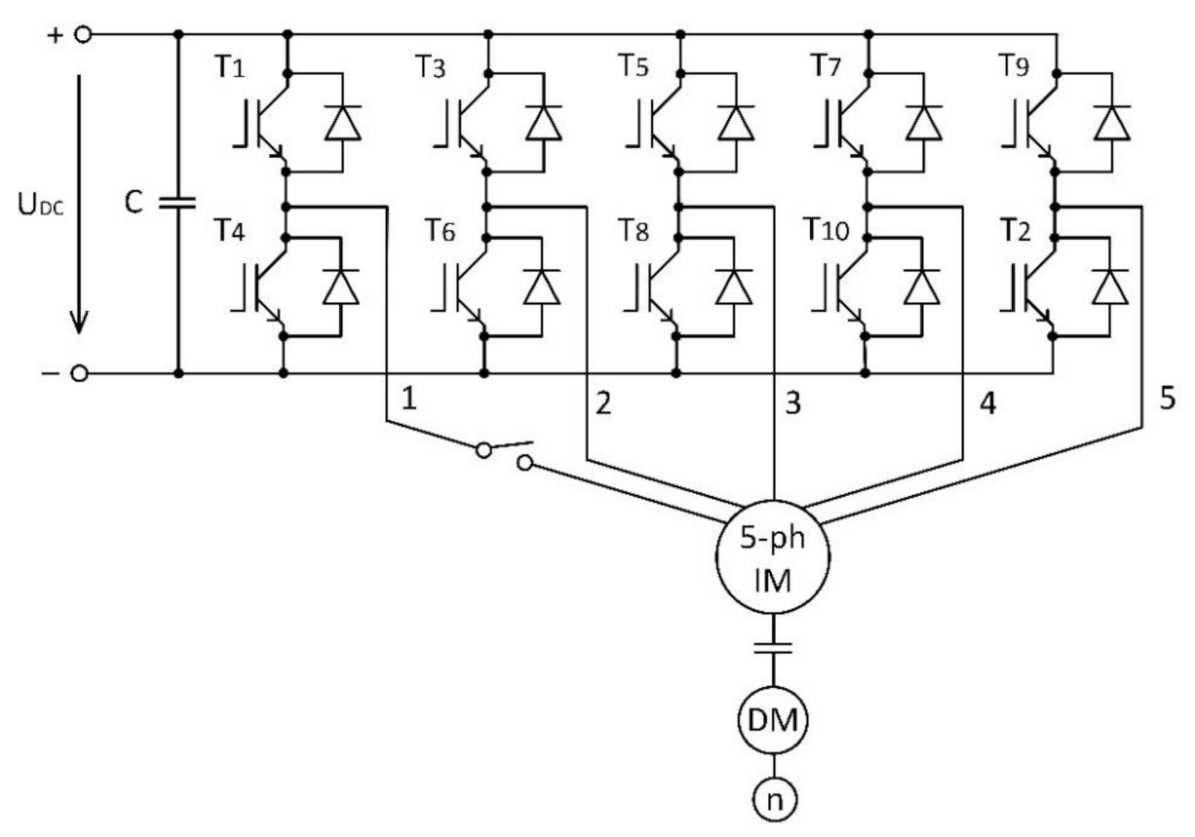
3. Modeling of Five-Phase Induction Motor
4. Simulation
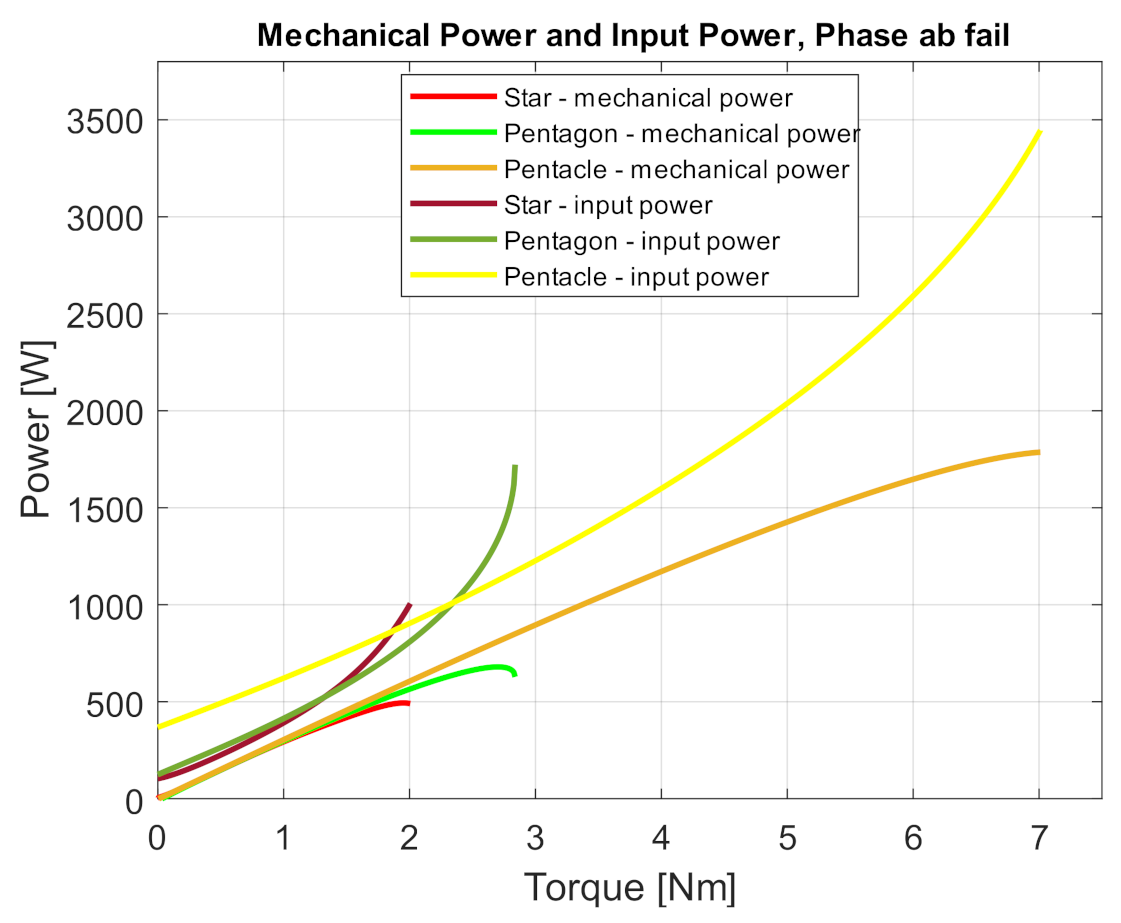
- PAV is an average value of input power of one phase (W)
- Urms is rms value of input voltage (V)
- Irms is rms value of input current (A)
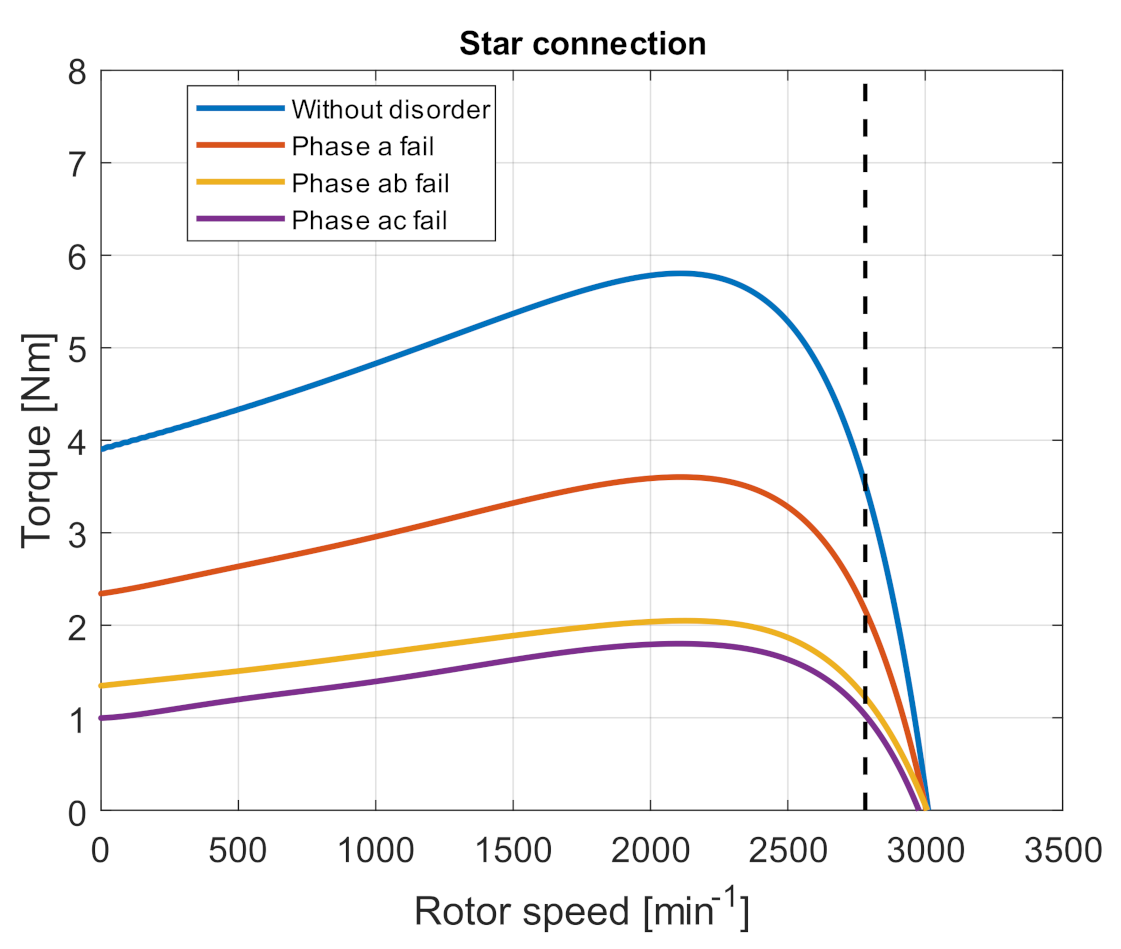
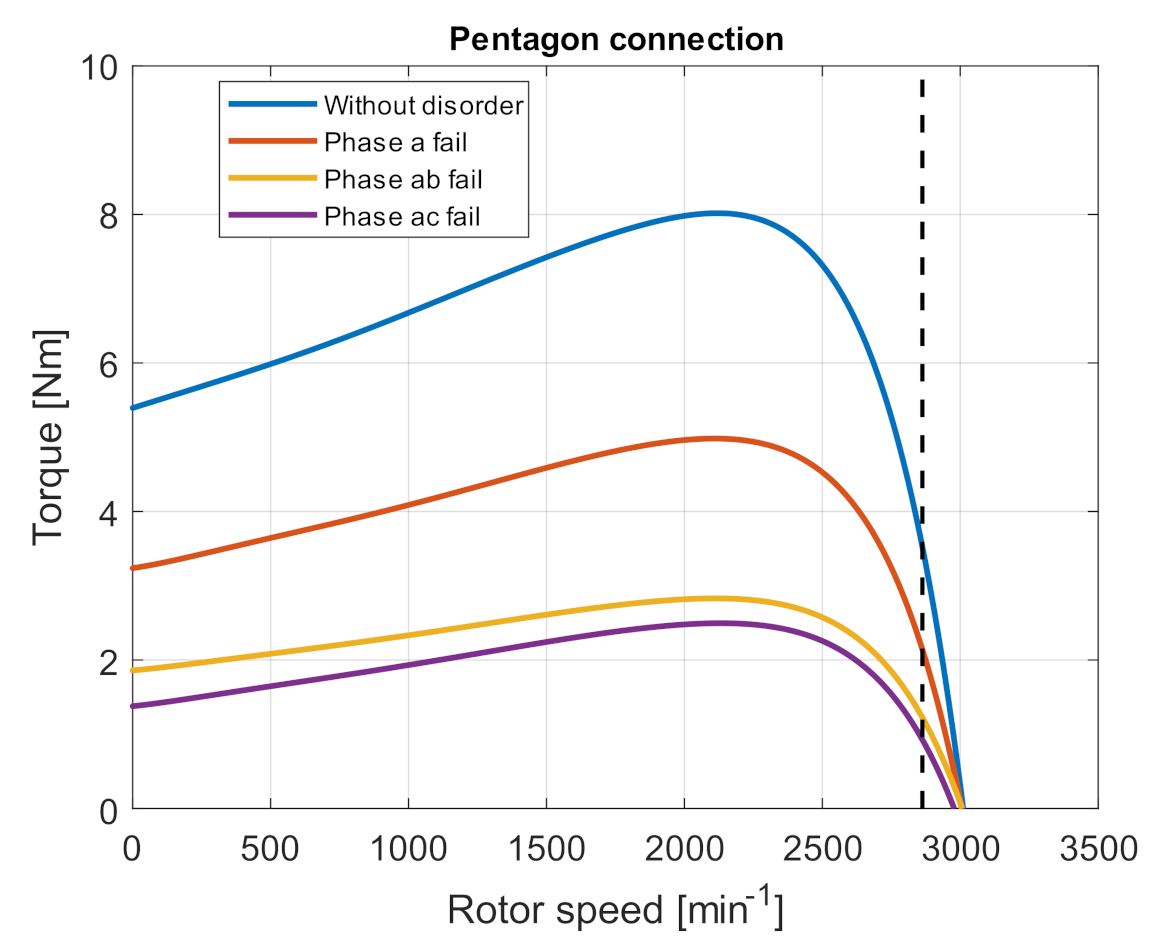
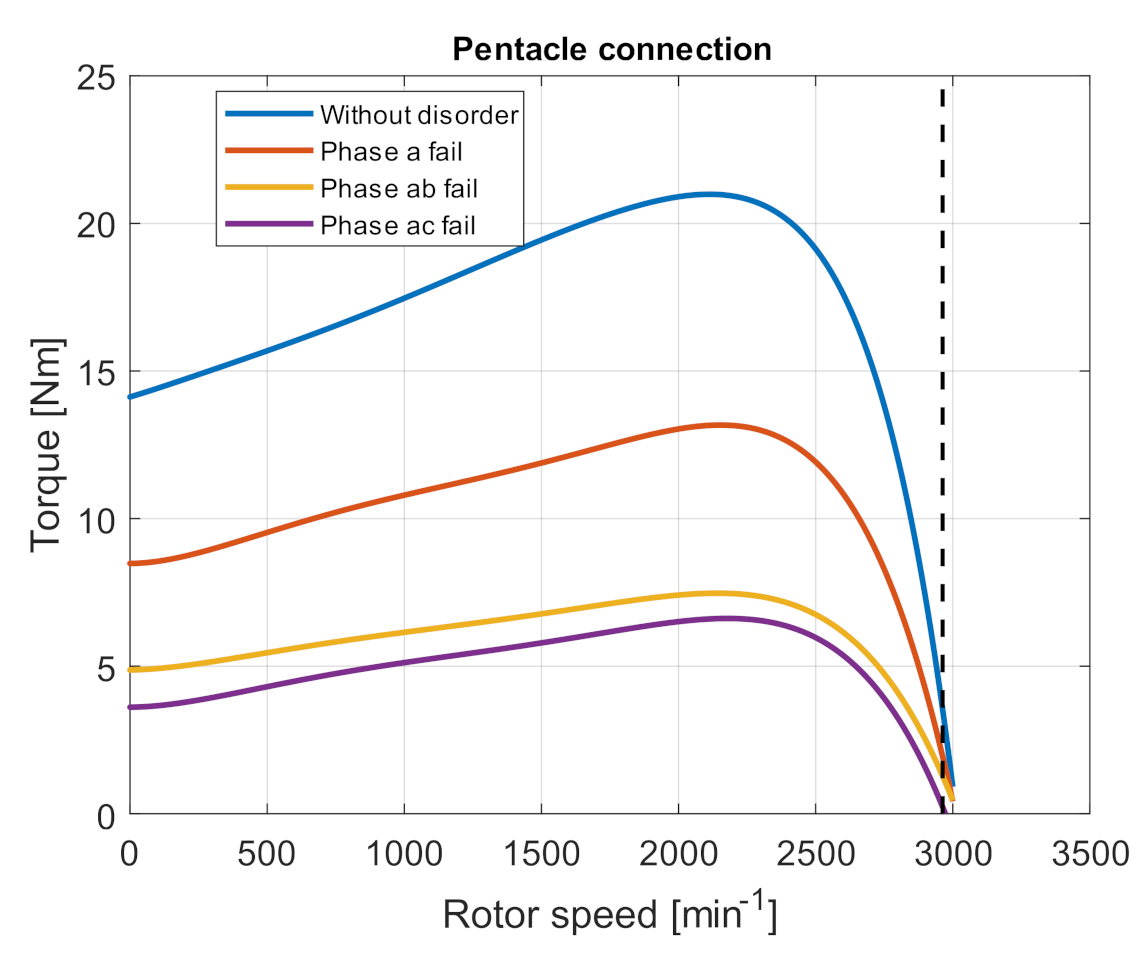
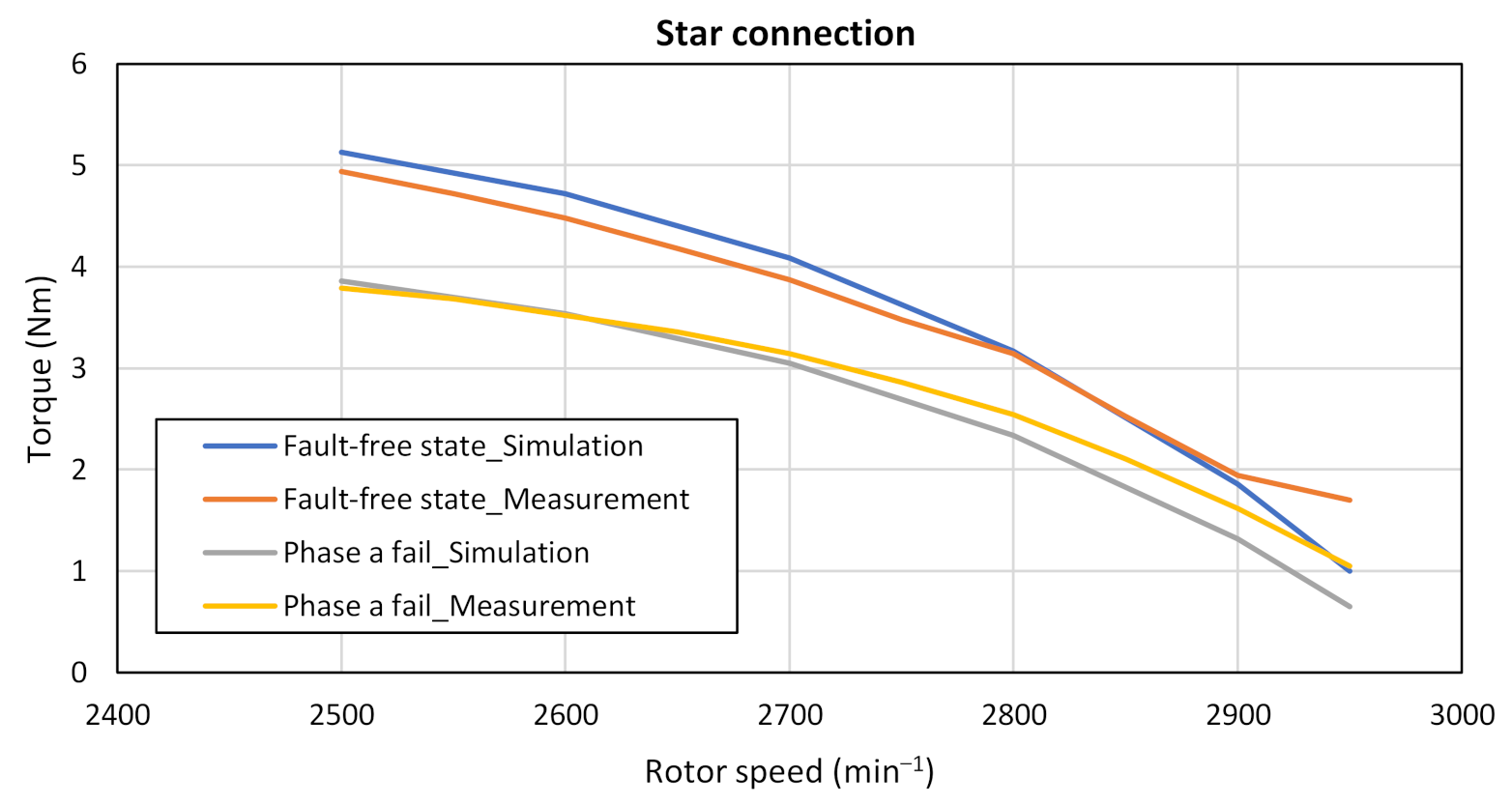
4.1. Simulation Verification of Torque for Fault Conditions
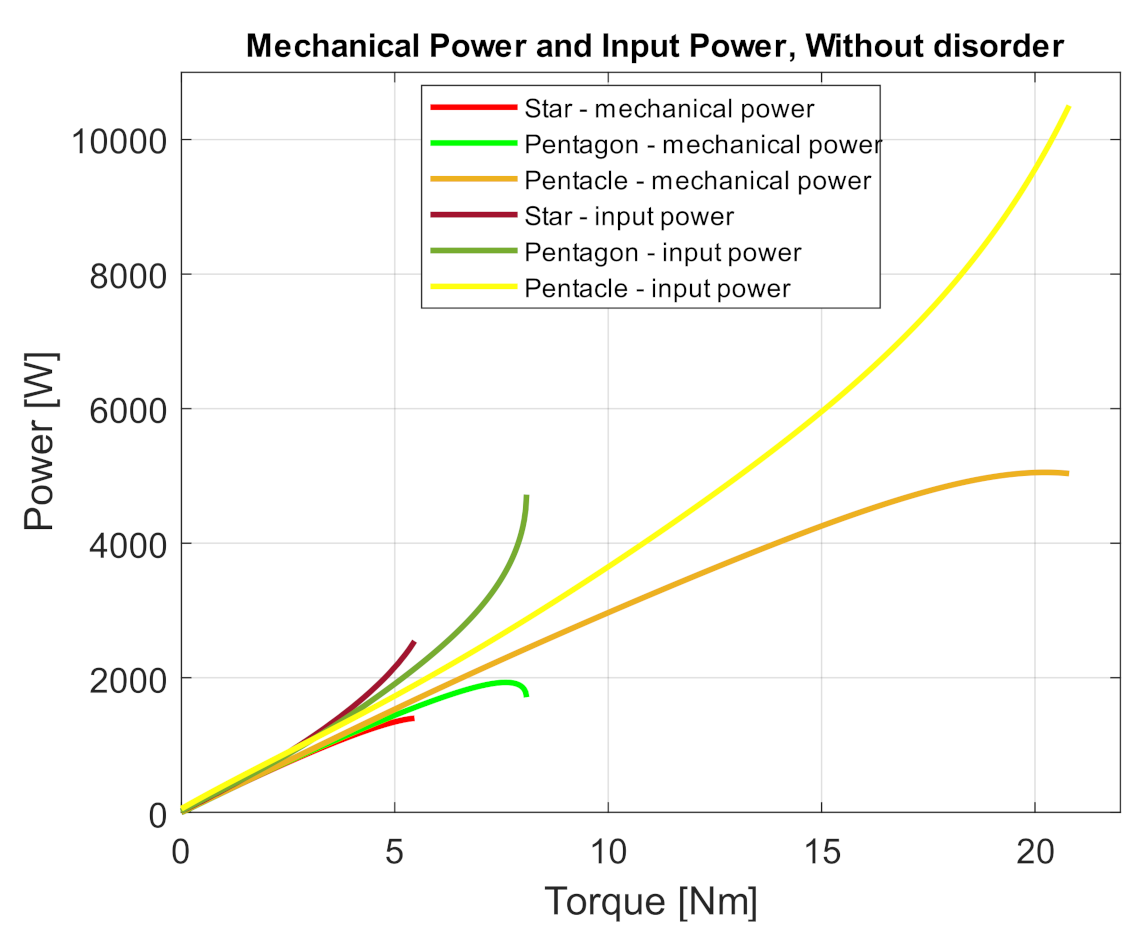
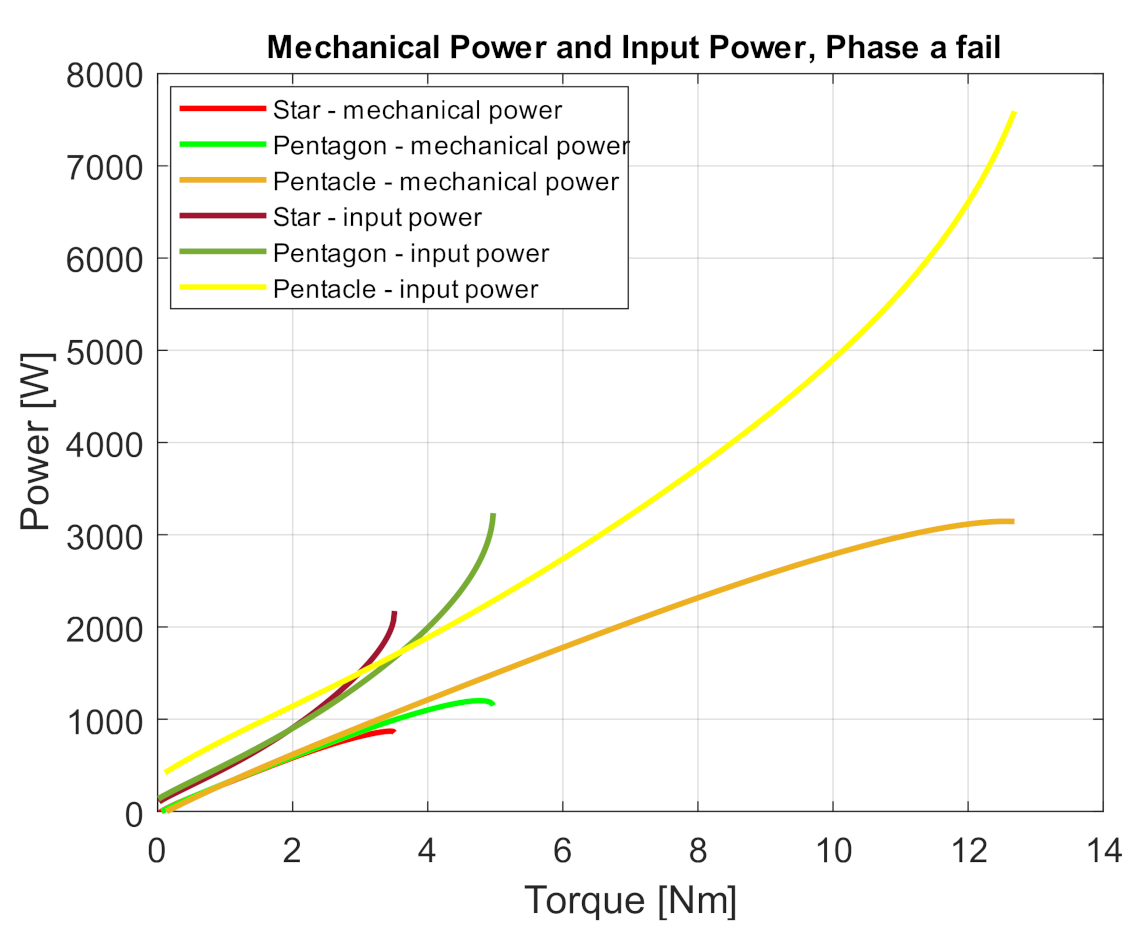
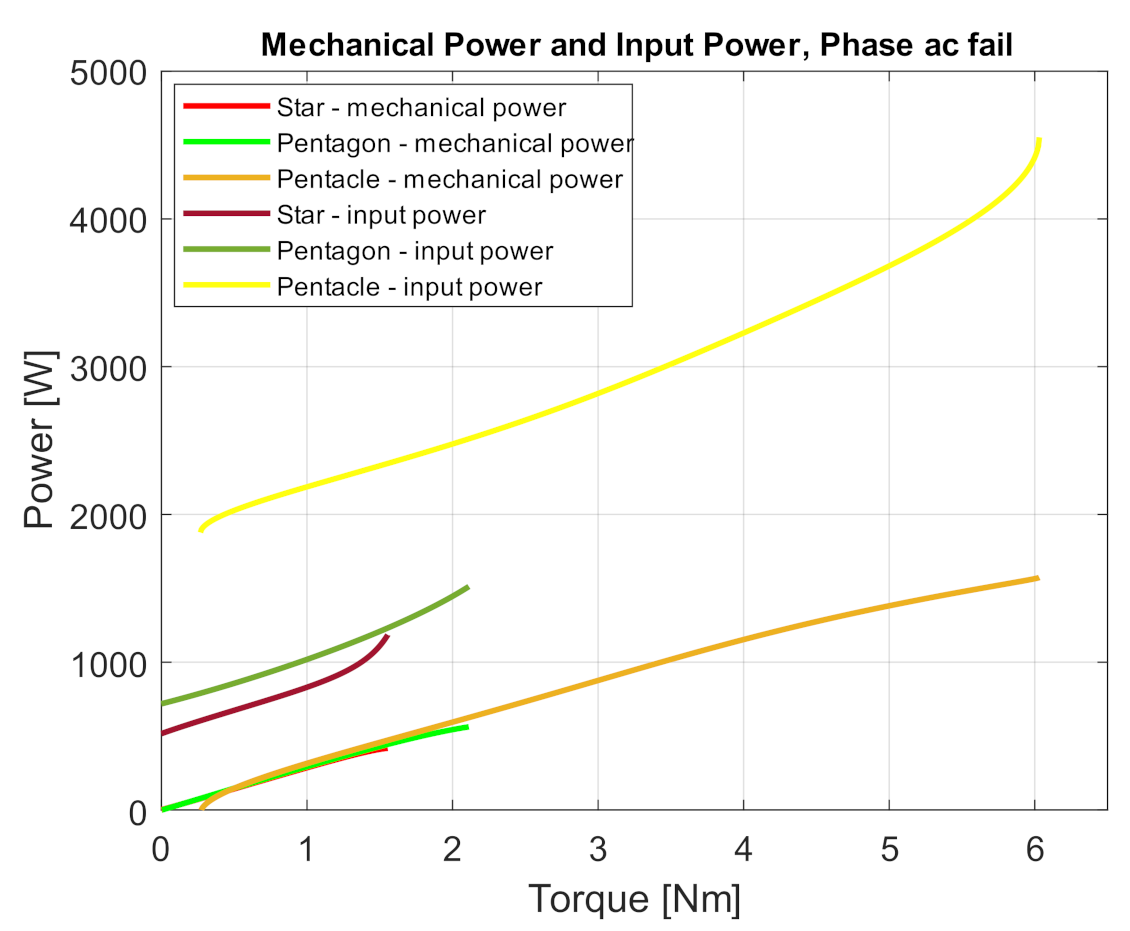
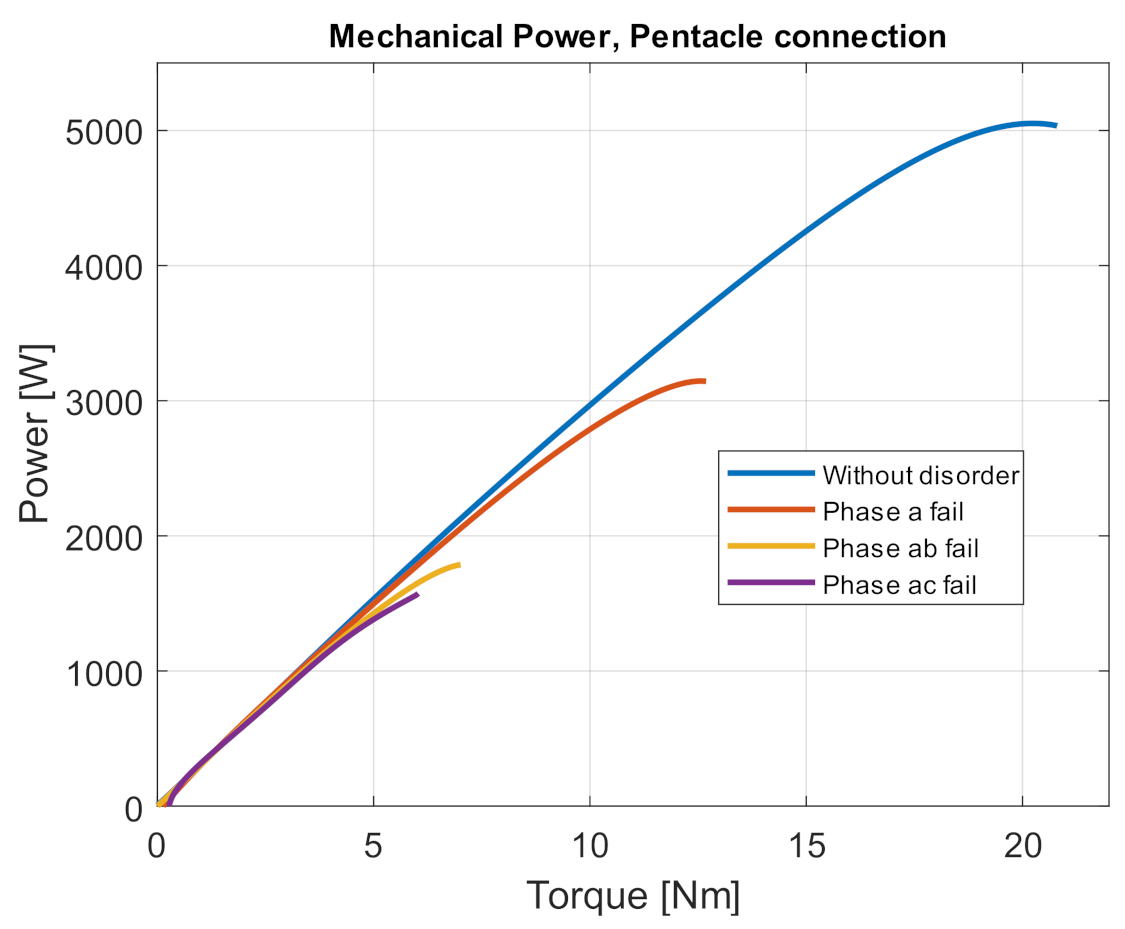
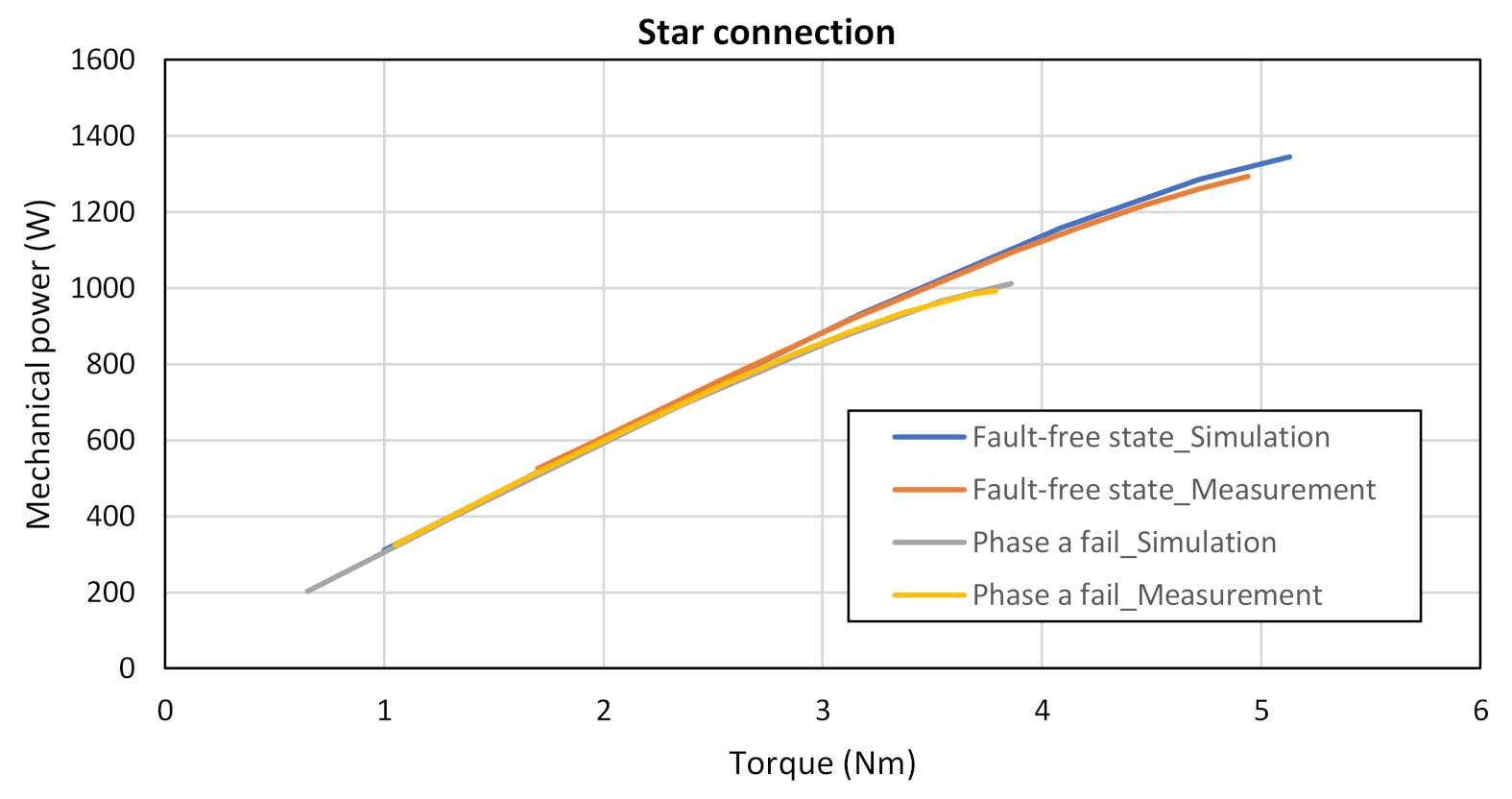
4.2. Simulation Verification of Input Power and Mechanical Power for Fault Conditions
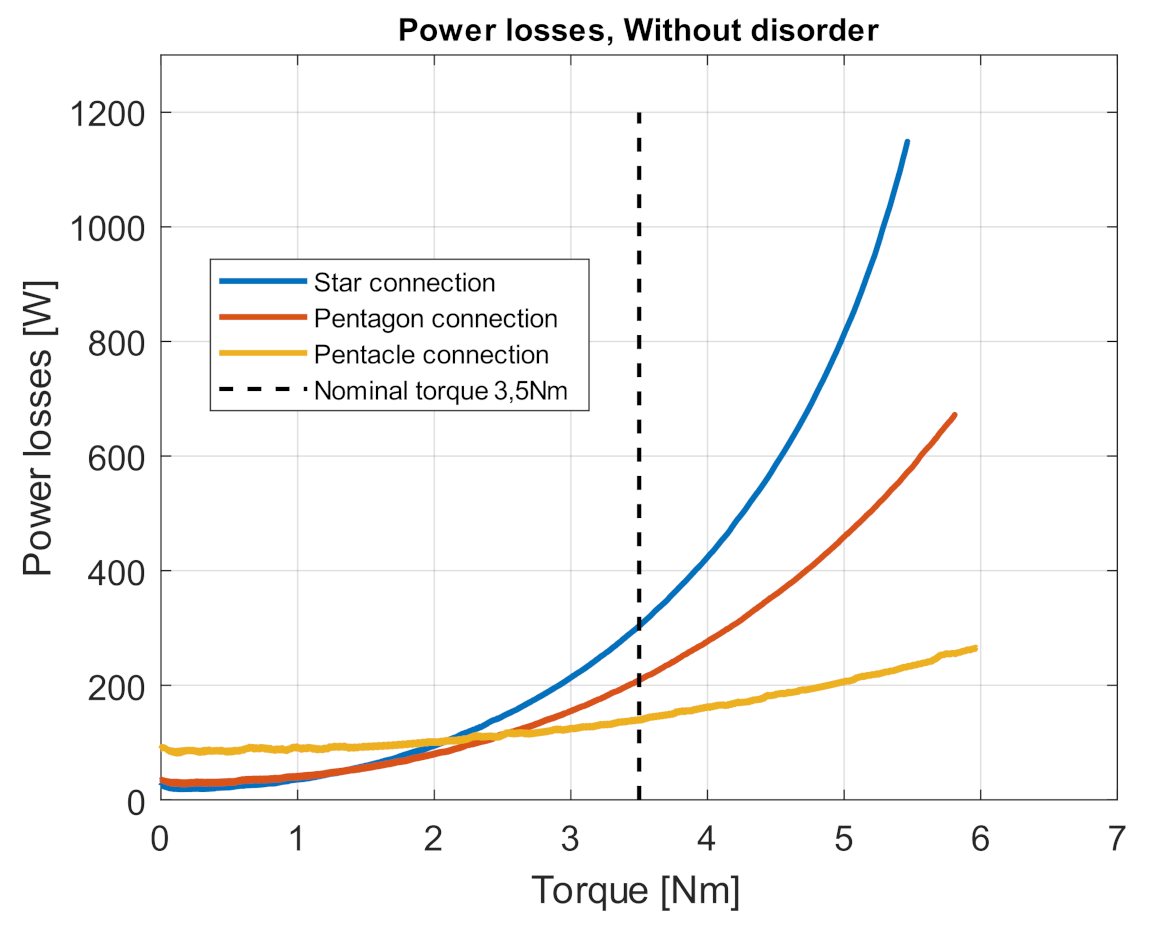
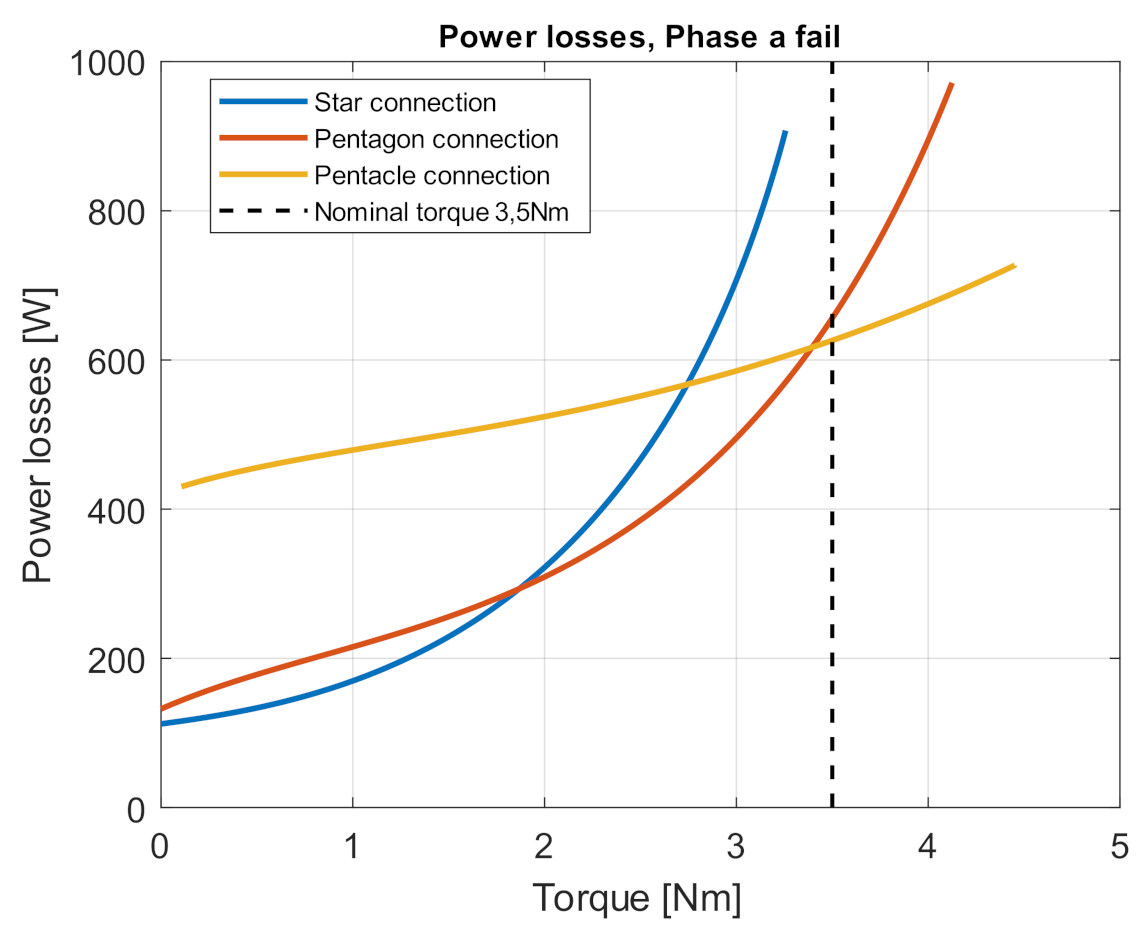
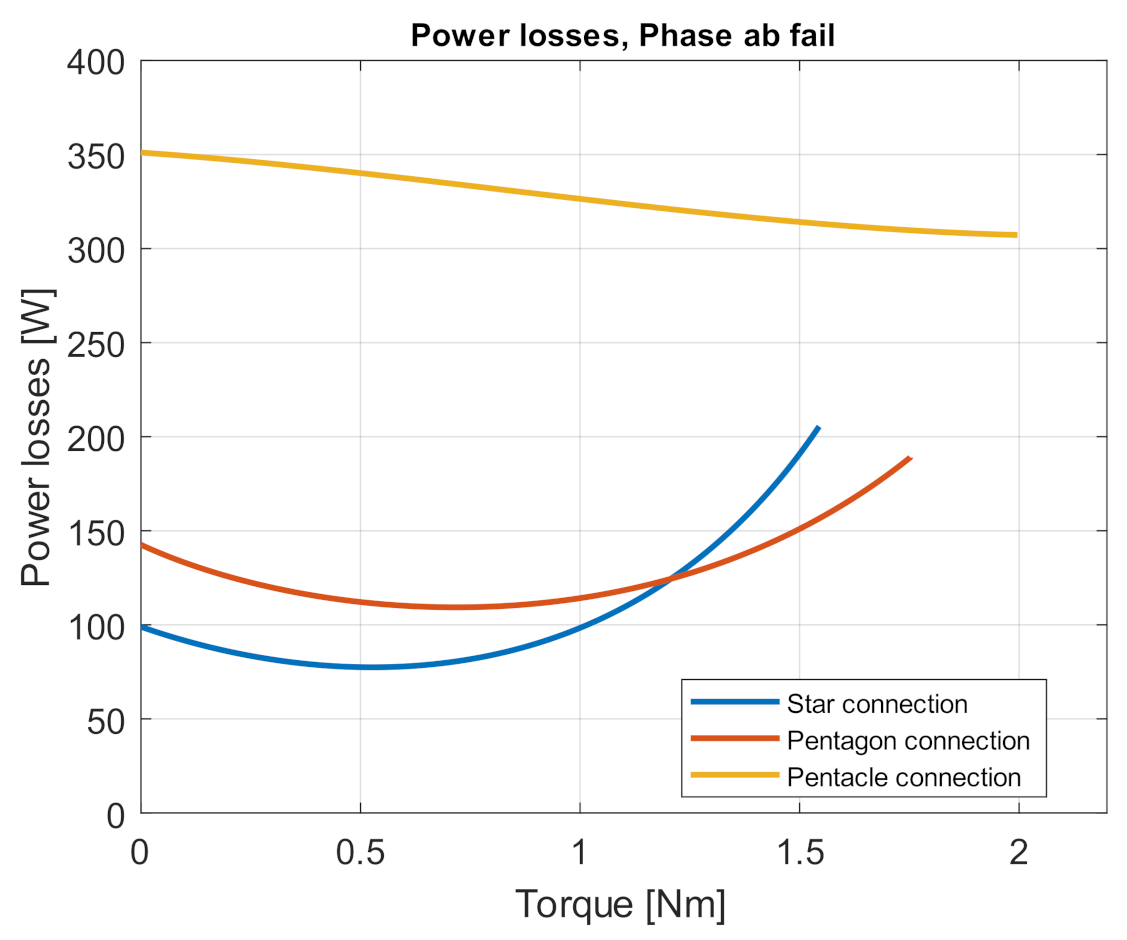
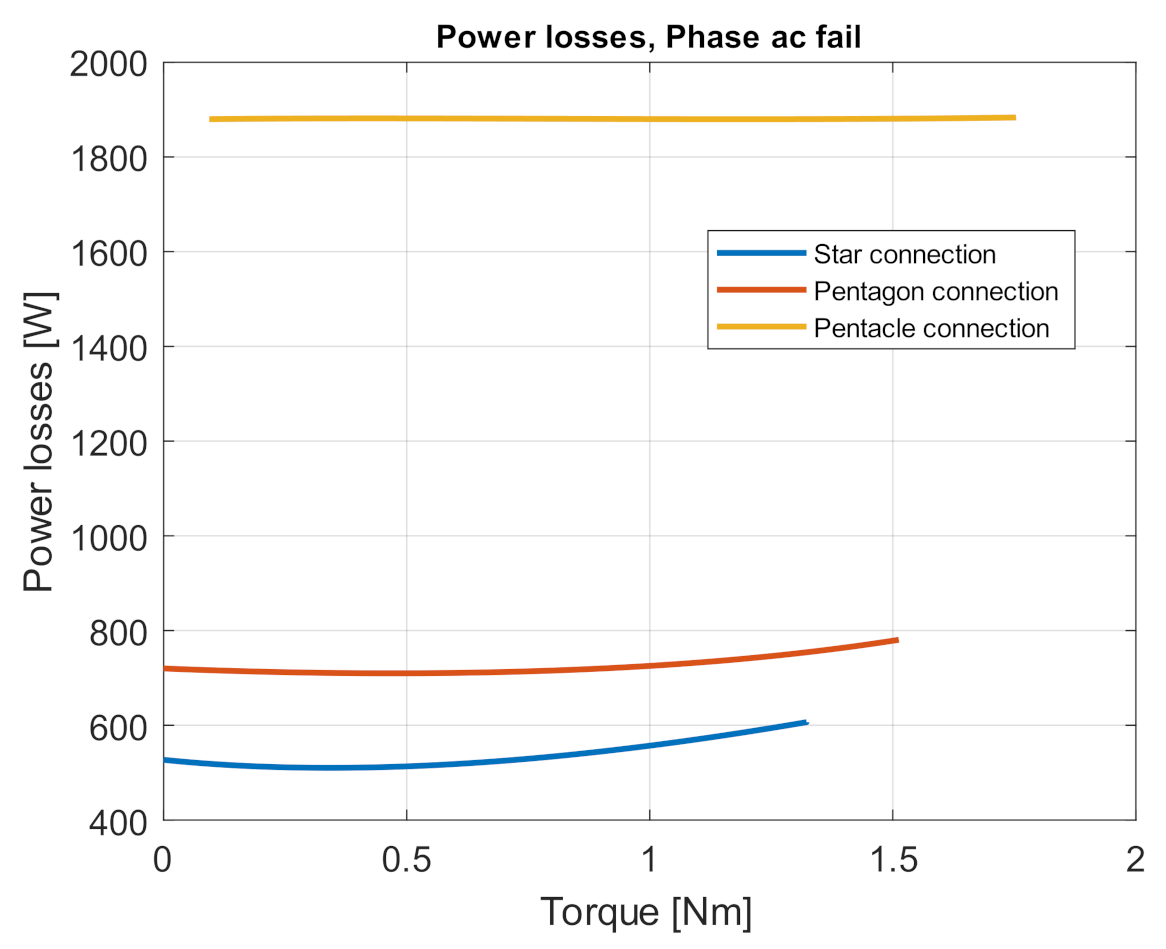
4.3. Simulation Verification of Power Losses for Fault Conditions
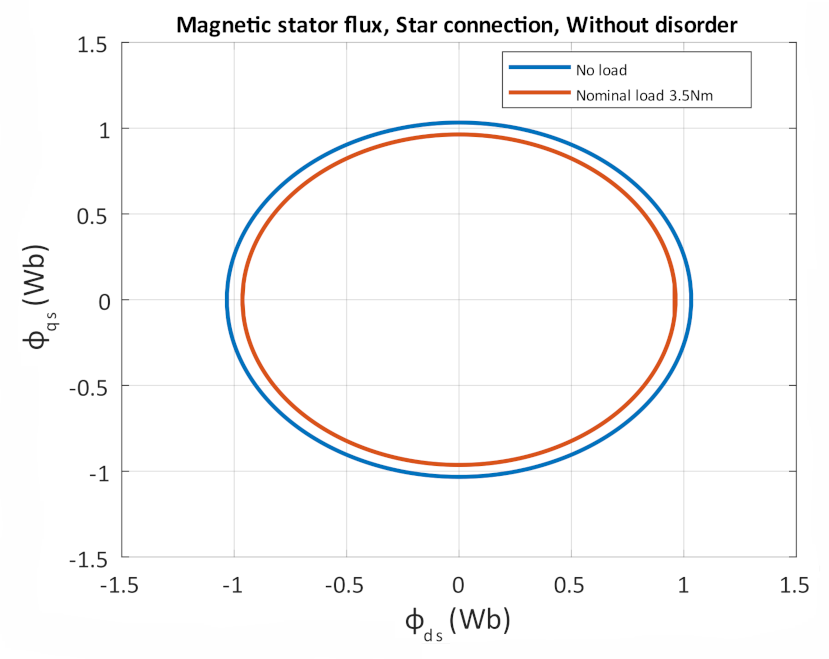
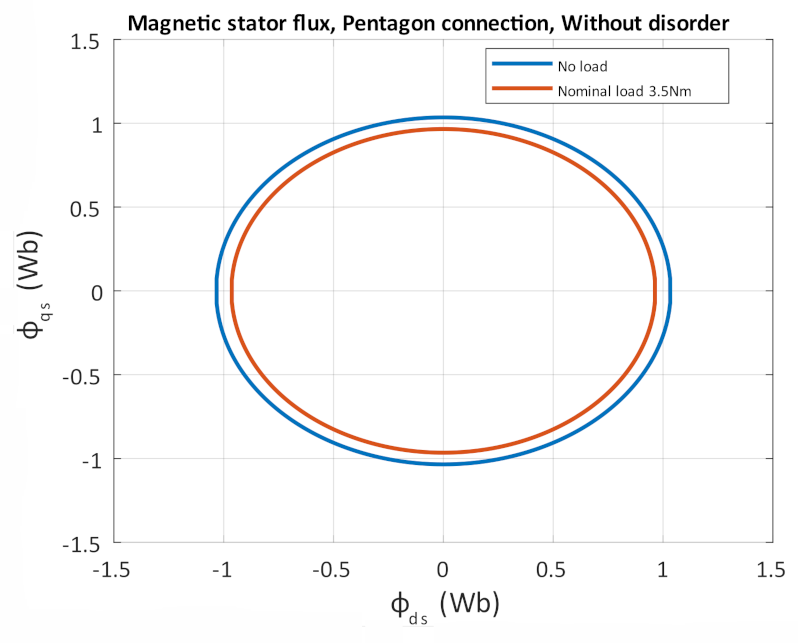
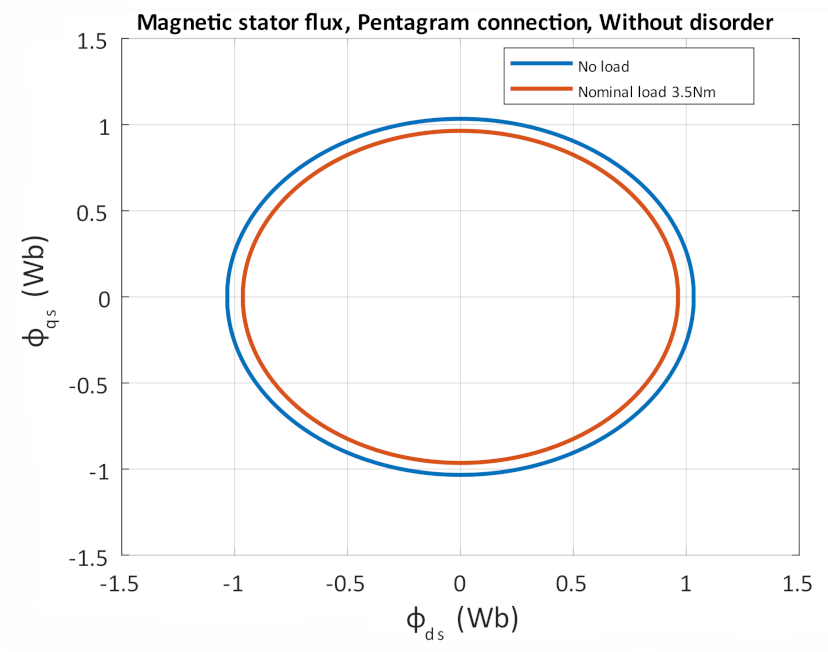
4.4. Simulation Verification of Power Losses for Various Connections at Constant Magnetic Flux
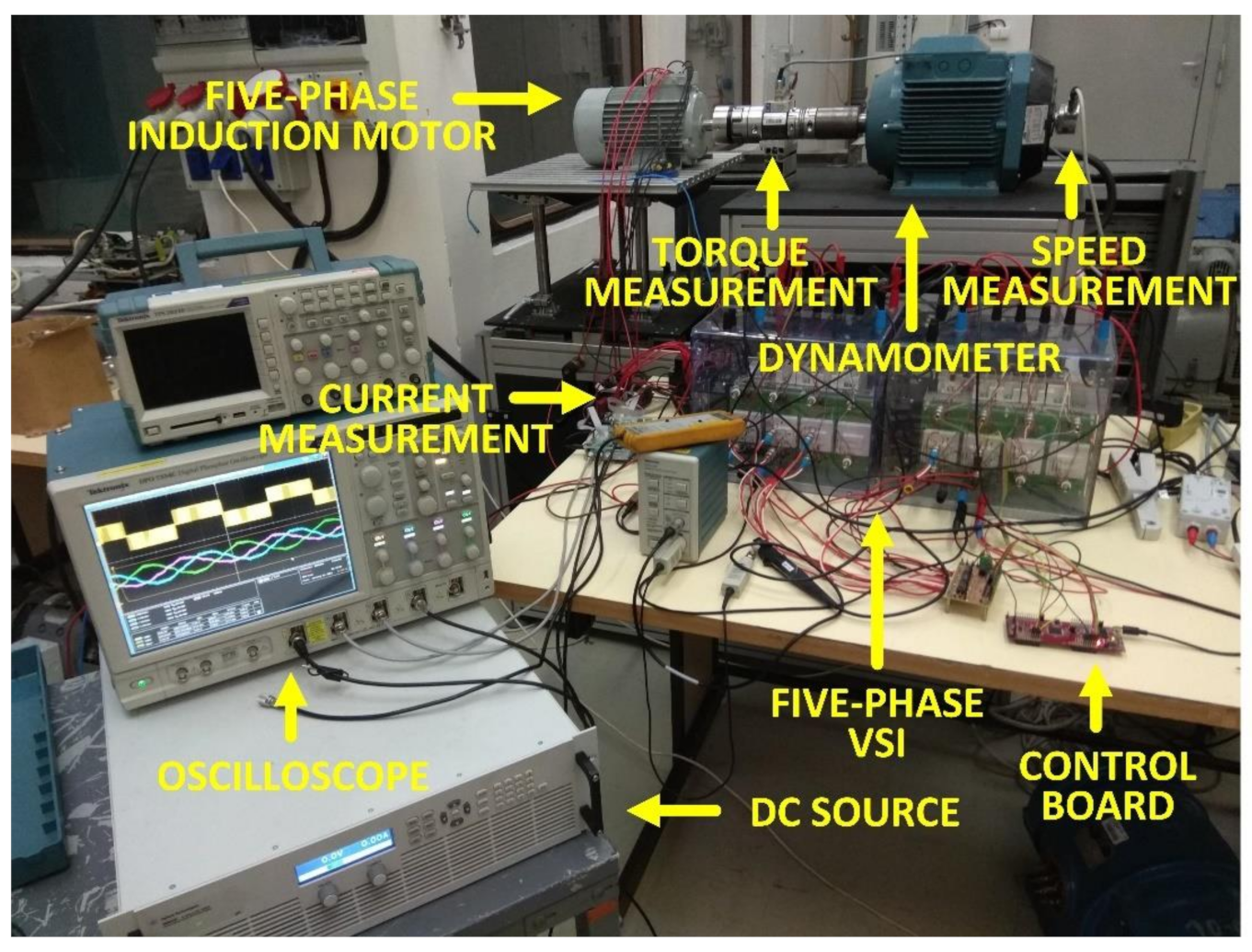
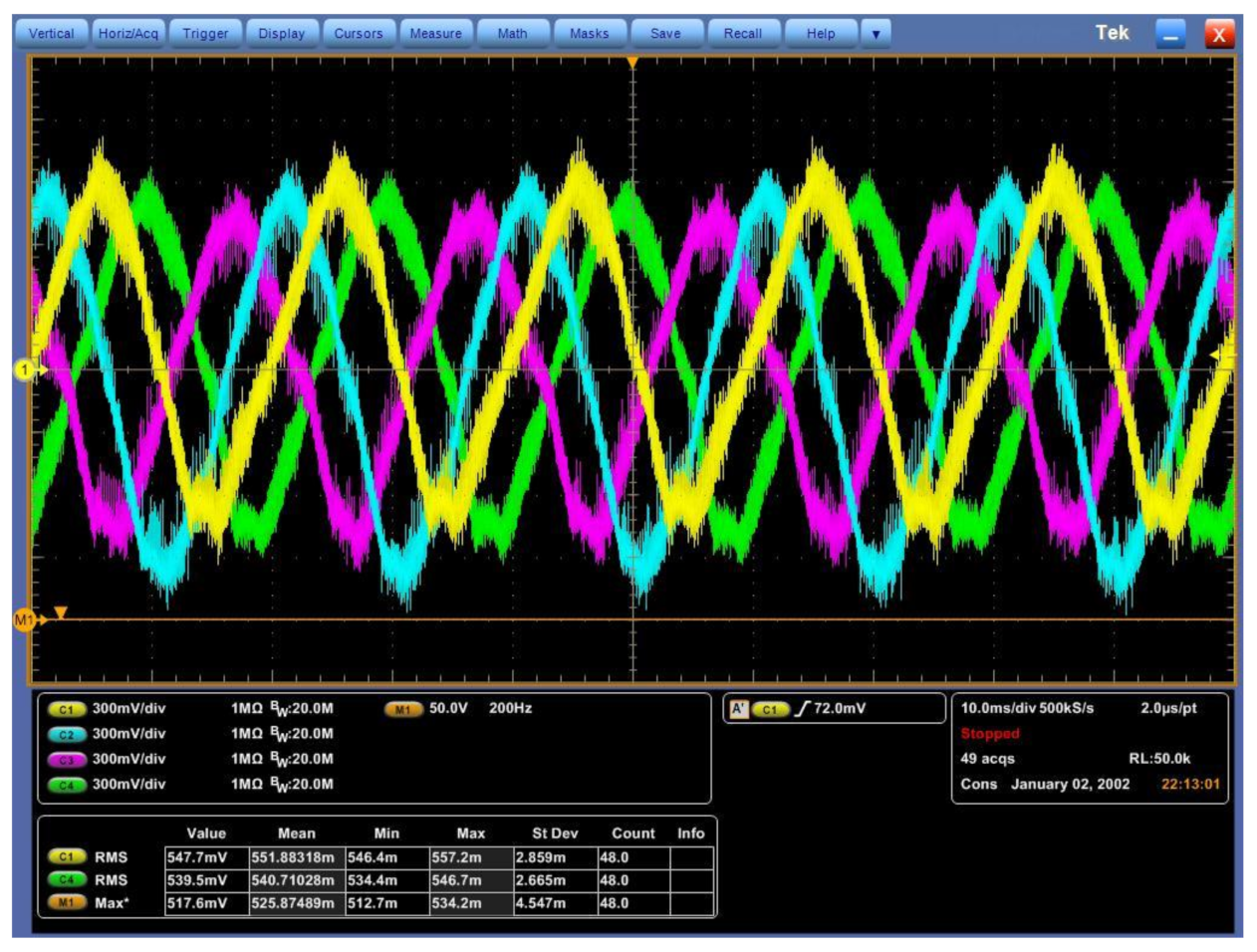
5. Measurement and Comparison with Simulation
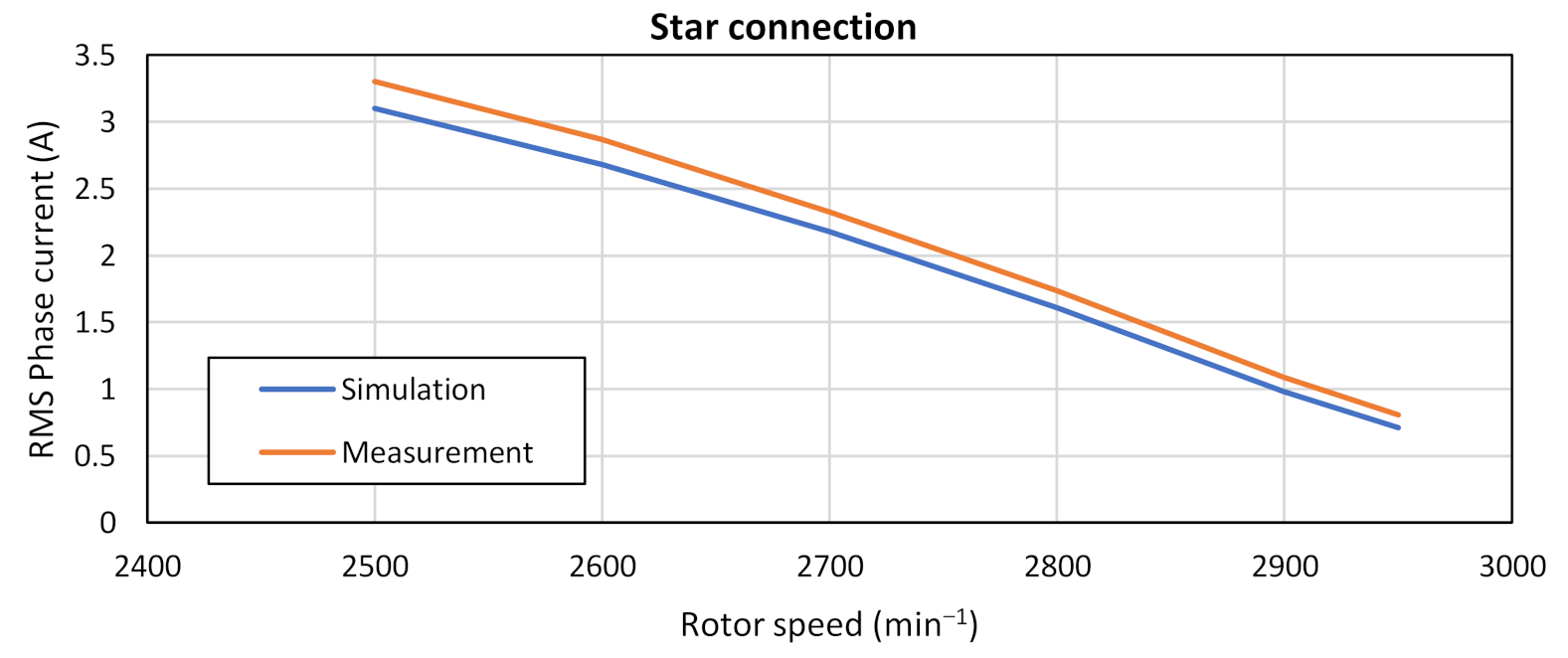
5.1. Measurement of Torque and Power of 5fIM in Fault-Free State and Case of Failure of One Phase in Star Connection
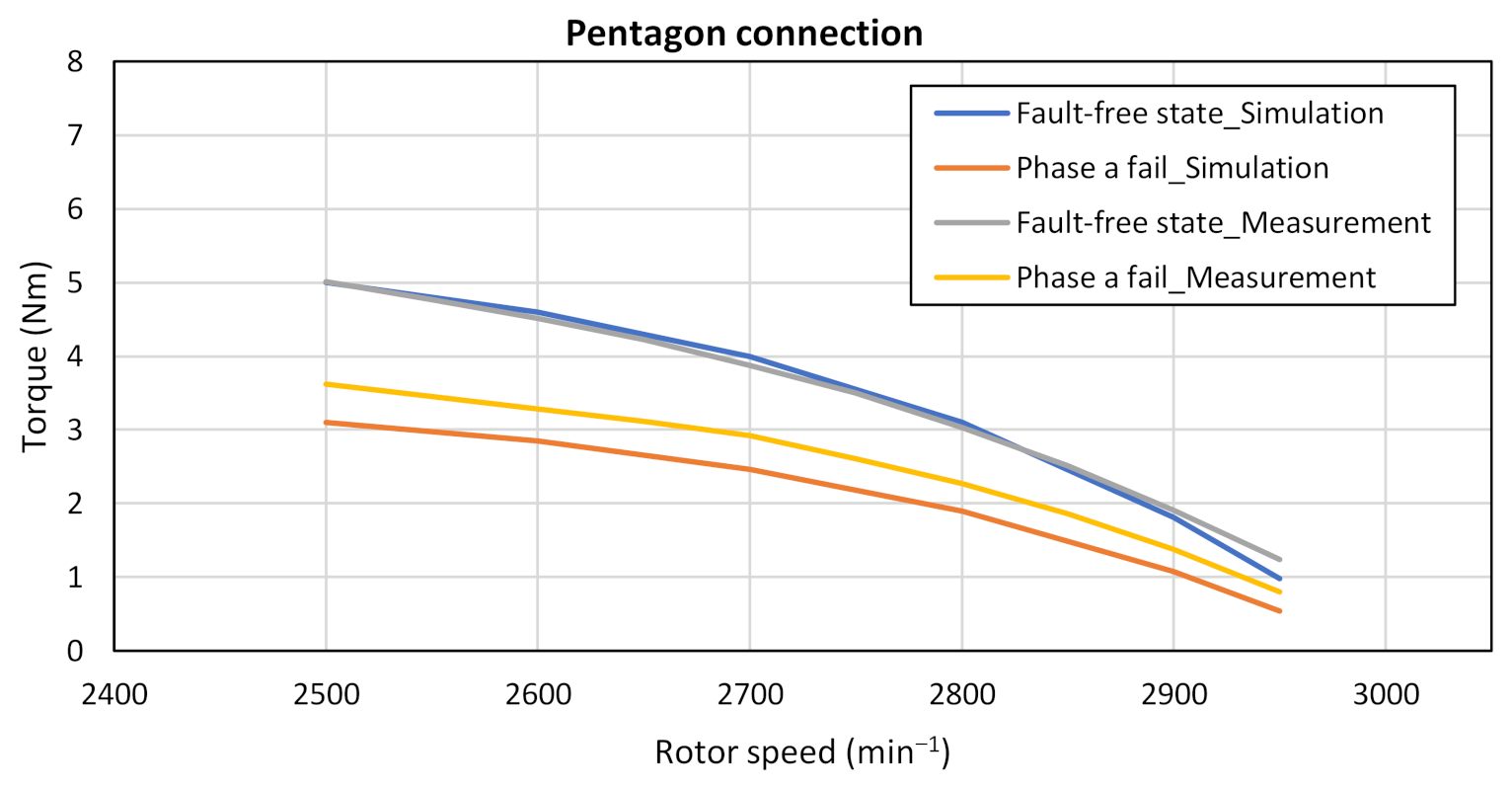
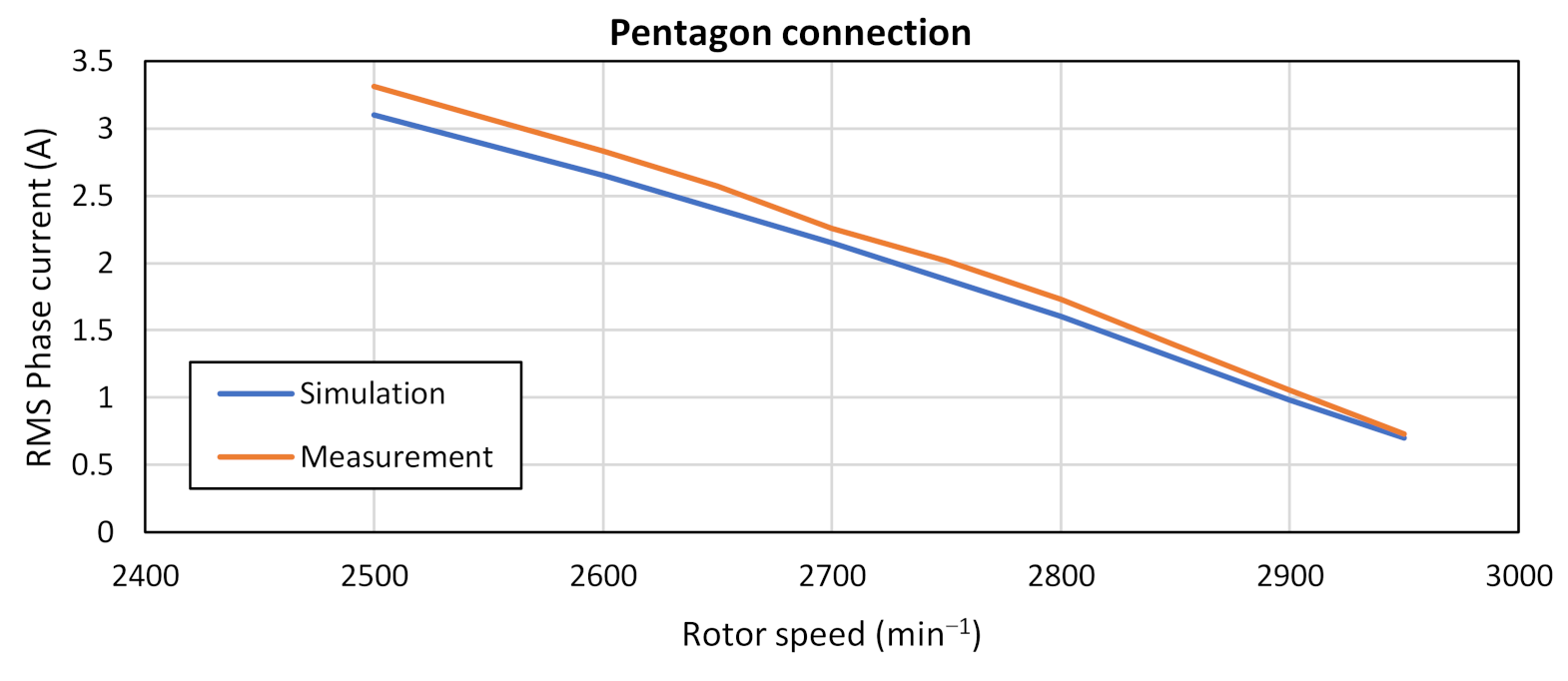
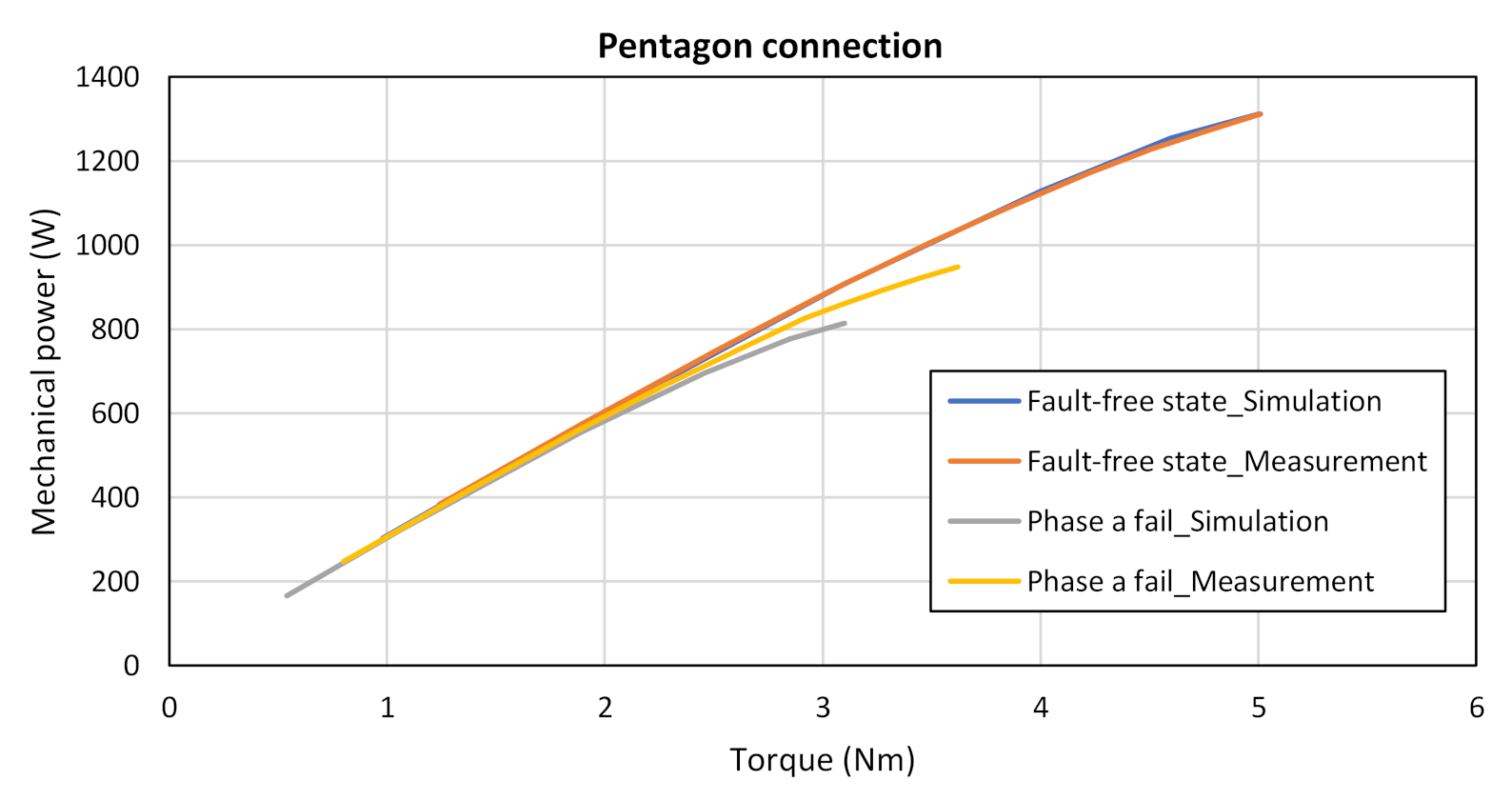
5.2. Measurement of Torque and Power of 5fIM in Fault-Free State and Case of Failure of One Phase in Pentagon Connection
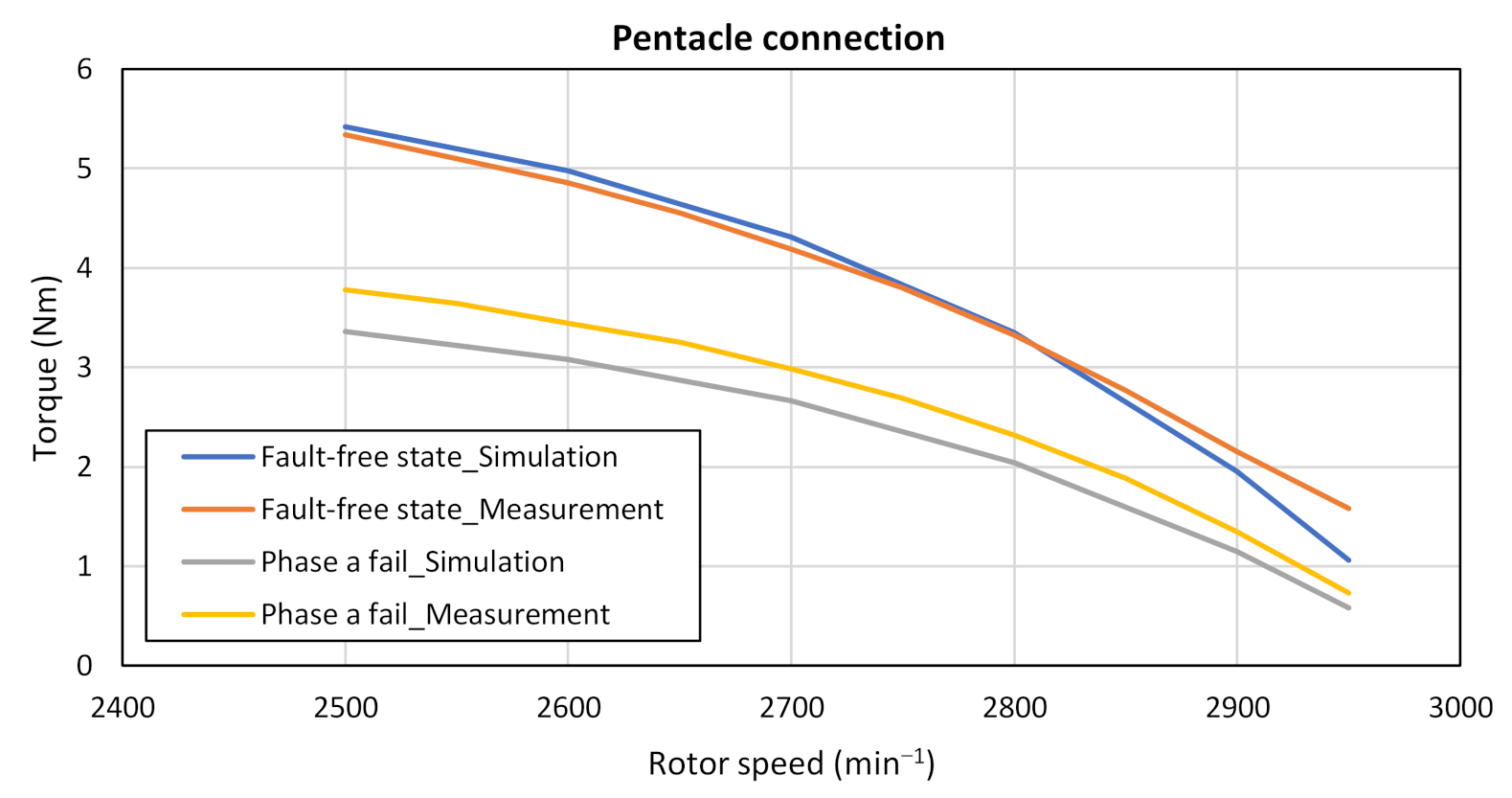
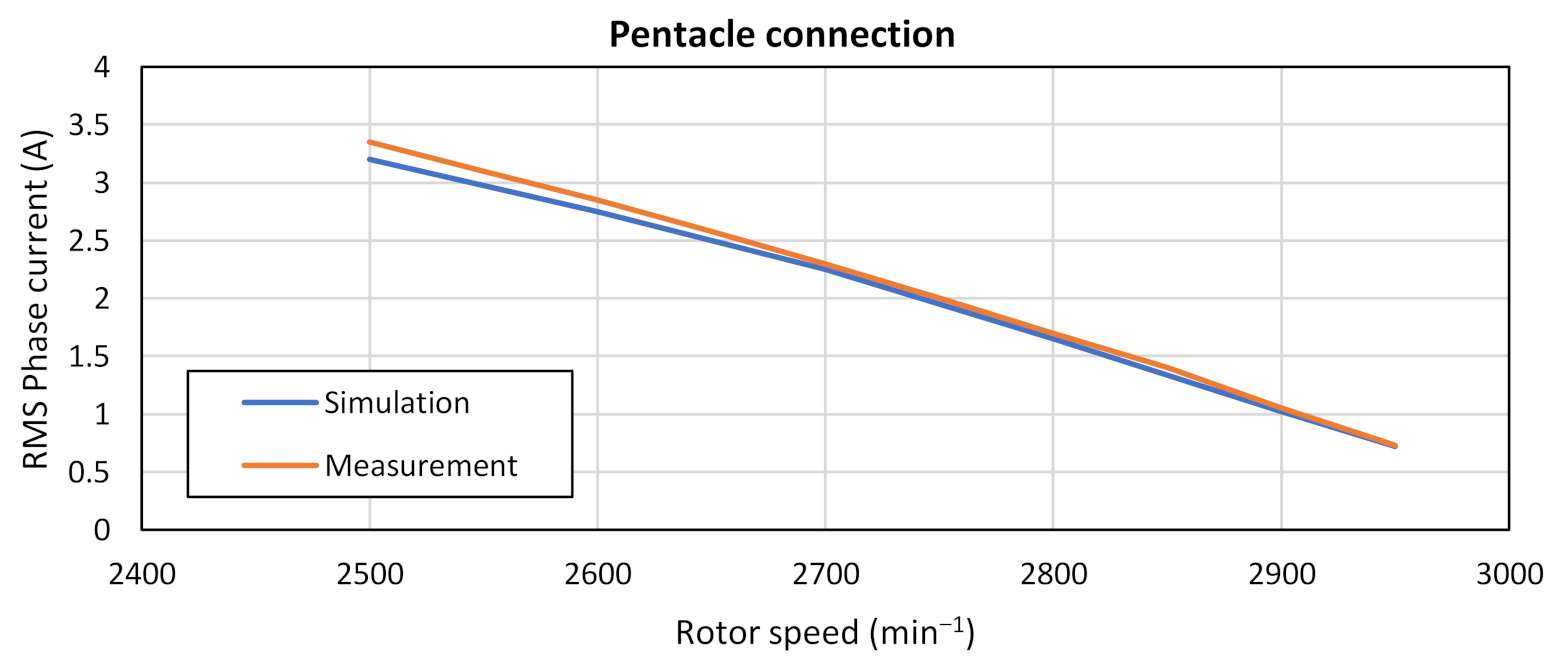
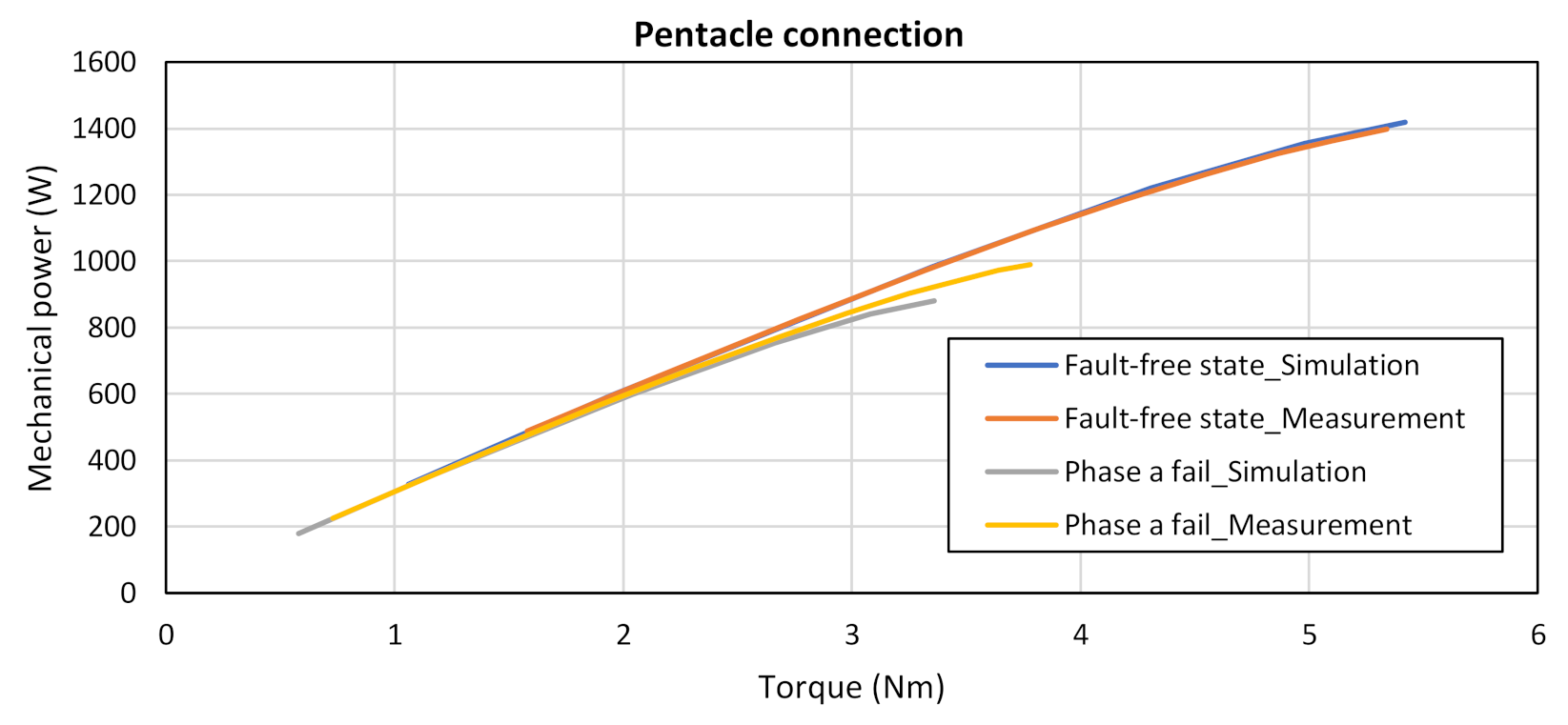
5.3. Measurement of Torque and Power of 5fIM in Fault-Free State and Case of Failure of One Phase in Pentacle Connection.
5.4. Conclusion of This Chapter
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Singh, G.K. Multi-phase induction machine drive research-a survey. Electr. Power Syst. Res. 2002, 61, 139–147. [Google Scholar] [CrossRef]
- Levi, E.; Jones, M.; Vukosavic, S.N.; Toliyat, H.A. A Novel Concept of A Multi-Phase, Multimotor Vector Controlled Drive System Supplied from A Single Voltage Source Inverter. IEEE Trans. Power Electron. 2004, 19, 320–335. [Google Scholar] [CrossRef]
- Pavol, S.; Michal, F.; Andrej, K. Life Time of the Electrolytic Capacitors in Power Applications. In Proceedings of the Elektro 10th International Conference, Rajecke Teplice, Slovakia, 19–20 May 2014. [Google Scholar]
- Karel, H.; Vladimir, K.; Roman, P. Evaluation of Different Approaches of Mathematical Modelling of Thermal Phenomena Applied to Induction Motors. In Proceedings of the ELEKTRO 10th International Conference, Rajecke Teplice, Slovakia, 19–20 May 2014. [Google Scholar]
- Jyothi, B.; Rao, M.V.G.; Karthik, T. Modeling and simulation of five phase induction motor fed with five phase inverter topologies. Indian J. Sci. Technol. 2015, 8. [Google Scholar] [CrossRef] [Green Version]
- Karel, H.; Vladimir, K.; Roman, P. Design and FEM Analyses of an Electrically Excited Automotive Synchronous Motor. In Proceedings of the 15th International Power Electronics and Motion Control Conference and Exposition (EPE-PEMC ECCE Europe), Novi Sad, Serbia, 4–6 September 2012. [Google Scholar]
- Schreier, L.; Bendl, J.; Chomat, M. Analysis of fault tolerance of five-phase induction machine with various configurations of stator winding. In Proceedings of the 2015 International Conference on Electrical Drives and Power Electronics (EDPE), Tatranska, Lomnica, 21–23 September 2015; pp. 196–203. [Google Scholar] [CrossRef]
- Parsa, L.; Toliyat, H.A. Fault-tolerant five-phase permanent magnet motor drives. In Proceedings of the Conference Record of the 2004 IEEE Industry Applications Conference, 2004. 39th IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004; Volume 2, pp. 1048–1054. [Google Scholar] [CrossRef]
- Nasir, A.; Qiang, G.; Xu, C.; Makys, P.; Stulrajter, M. Fault diagnosis and tolerant control for power converter in SRM drives. J. Eng. JOE 2018, 2018, 546–551. [Google Scholar]
- Zaskalicky, P. Pentagon Connected Five-Phase Induction Machine Working under One-Phase Fault. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 339–344. [Google Scholar] [CrossRef]
- Zheng, L.; Fletchert, J.E.; Williams, B.W. Current Optimization for a Multi-Phase Machine under an Open Circuit Phase Fault Condition. In Proceedings of the 2006 3rd IET International Conference on Power Electronics, Machines and Drives—PEMD 2006, The Contarf Castle, Dublin, Ireland, 4–6 April 2006; pp. 414–419. [Google Scholar]
- Zaskalicky, P. Behavior of a Five-Phase Pentacle Connected IM Operated under One-Phase Fault. In Proceedings of the 2019 International Aegean Conference on Electrical Machines and Power Electronics (ACEMP) & 2019 International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Istanbul, Turkey, 27–29 August 2019; pp. 126–131. [Google Scholar] [CrossRef]
- Casadei, D.; Mengoni, M.; Serra, G.; Tani, A.; Zarri, L. Optimal fault-tolerant control strategy for multi-phase motor drives under an open circuit phase fault condition. In Proceedings of the 2008 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Fu, J.; Lipo, T.A. Disturbance-free operation of a multi-phase current-regulated motor drive with an opened phase. IEEE Trans. Ind. Appl. 1994, 30, 1267–1274. [Google Scholar] [CrossRef]
- Milan, D.; Pavol, R.; Pavol, M. A novel concept of short-flux path switched reluctance motor for electrical vehicles. Adv. Electr. Electron. Eng. 2015, 13, 206–211. [Google Scholar]
- Guzmán, H.; Durán, M.J.; Barrero, F. A comprehensive fault analysis of a five-phase induction motor drive with an open phase. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. 5–6. [Google Scholar] [CrossRef]
- Zhang, L.; Zhu, X.; Gao, J.; Mao, Y. Design and Analysis of New Five-Phase Flux-Intensifying Fault-Tolerant Interior-Permanent-Magnet Motor for Sensorless Operation. IEEE Trans. Ind. Electron. 2020, 67, 6055–6065. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Tarek, M.T.B.; Arafat, A.K.M.; Islam, M.Z.; Choi, S. Fault-tolerant performance comparisons between external and internal rotor PMa-SynRMs. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 2933–2939. [Google Scholar] [CrossRef]
- Tao, T.; He, Y.; Xue, R.; Zhao, W.; Zeng, T. Fault-Tolerant Predictive Model Control for Five-Phase PM Motor With Optimal Duty Modulation Strategy. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Špánik, P.; Frivaldský, M.; Drgoňa, P.; Kandráč, J. Efficiency Increase of Switched Mode Power Supply through Optimization of Transistor’s Commutation Mode. Elektron Elektrotech 2010, 105, 49–52. [Google Scholar]
- Frivaldsky, M. l Piri, M.; Spanik, P. Peak efficiency and peak power point operation of wireless energy transfer (WET) system—Analysis and verification. Electr Eng. 2017, 99, 1439–1451. [Google Scholar] [CrossRef]
- Levi, E.; Jones, M.; Vukosavic, S.N.; Iqbal, A.; Toliyat, H.A. Modeling, Control, and Experimental Investigation of a Five-Phase Series-Connected Two-Motor Drive With Single Inverter Supply. IEEE Trans. Ind. Electron. 2007, 54, 1504–1516. [Google Scholar] [CrossRef]
- Masoud, M.I. Five phase induction motor: Phase transposition effect with different stator winding connections. In Proceedings of the IECON 2016 42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 1648–1655. [Google Scholar] [CrossRef]
- Špánik, P.; Dobrucký, B.; Frívaldský, M.; Drgoňa, P.; Kurytnik, I. Measurement of switching losses in power transistor structure. Elektron Elektrotech 2008, 82, 75–78. [Google Scholar]
- Peter, D.; Pavol, R.; Pavol, M. Control Of Switched Reluctance Motor By Current Profiling Under Normal And Open Phase Operating Condition. IET Electr. Power Appl. 2017, 11, 548–556. [Google Scholar]
- Kiran, S.; Aher, A.; Thosar, G. Modeling and Simulation of Five Phase Induction Motor using MATLAB/Simulink. Int. J. Eng. Res. Appl. 2016, 6, 1–8. [Google Scholar]
- Chinmaya, K.A.; Singh, G.K. Modeling and Comparison of Space Vector PWM Schemes for a Five- Phase Induction Motor Drive. In Proceedings of the IECON 2018 44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 559–564. [Google Scholar] [CrossRef]
- Raja, D.; Ravi, G. Design and Implementation of Five Phase Inverter with modified SVPWM Switching Technique for Induction Motor Drive. In Proceedings of the 2019 Fifth International Conference on Science Technology Engineering and Mathematics (ICONSTEM), Chennai, India, 14–15 March 2019; pp. 332–337. [Google Scholar] [CrossRef]
- Záskalický, P. Complex Fourier series mathematical model of a five-phase VSI with PWM output voltage control. In Proceedings of the 2016 ELEKTRO, Strbske Pleso, Slovakia, 16–18 May 2016; pp. 243–246. [Google Scholar] [CrossRef]







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Signature | Value | Unit |
|---|---|---|---|
| Stator resistance | Rs | 15.05 | Ω |
| Rotor resistance | Rr | 5.926 | Ω |
| Stator inductance | Ls | 0.8714 | H |
| Rotor inductance | Lr | 0.8714 | H |
| Mutual inductance | Lm | 0.85 | H |
| Number of pole pairs | p | 2 | - |
| Moment of inertia | J | 0.007 | kg × m2 |
| Mechanical power | Pn | 1.1 | kW |
| Source voltages | Ua-e | 5 × 230 | V |
| Connection | Signature | No Load | Nominal Load (3.5 Nm) | Load (2 Nm) | Unit |
|---|---|---|---|---|---|
| Star—Without disorder | Ploss | 49.60 | 165.50 | - | W |
| Pentagon—Without disorder | Ploss | 51 | 164.25 | - | W |
| Pentacle—Without disorder | Ploss | 49.85 | 163 | - | W |
| Star—Fault phase a | Ploss | 251 | 570.90 | - | W |
| Pentagon—Fault phase a | Ploss | 250 | 570.20 | - | W |
| Pentacle—Fault phase a | Ploss | 249.40 | 569.80 | - | W |
| Star—Fault phase ab | Ploss | 206.80 | - | 217 | W |
| Pentagon—Fault phase ab | Ploss | 206.50 | - | 216.50 | W |
| Pentacle—Fault phase ab | Ploss | 206.90 | - | 215.60 | W |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kellner, J.; Kaščák, S.; Praženica, M.; Resutík, P. A Comprehensive Investigation of the Properties of a Five-Phase Induction Motor Operating in Hazardous States in Various Connections of Stator Windings. Electronics 2021, 10, 609. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10050609
Kellner J, Kaščák S, Praženica M, Resutík P. A Comprehensive Investigation of the Properties of a Five-Phase Induction Motor Operating in Hazardous States in Various Connections of Stator Windings. Electronics. 2021; 10(5):609. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10050609
Chicago/Turabian StyleKellner, Jakub, Slavomír Kaščák, Michal Praženica, and Patrik Resutík. 2021. "A Comprehensive Investigation of the Properties of a Five-Phase Induction Motor Operating in Hazardous States in Various Connections of Stator Windings" Electronics 10, no. 5: 609. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics10050609