
Measurement, Evaluation, and Control of Active Intelligent Gait Training Systems—Analysis of the Current State of the Art

 , , and
, , and
Abstract
:1. Introduction
2. Human Gait Measurement and Intention Recognition
2.1. Gait Movement Measurement
2.2. Movement Intention Recognition
3. Evaluation of Gait Rehabilitation
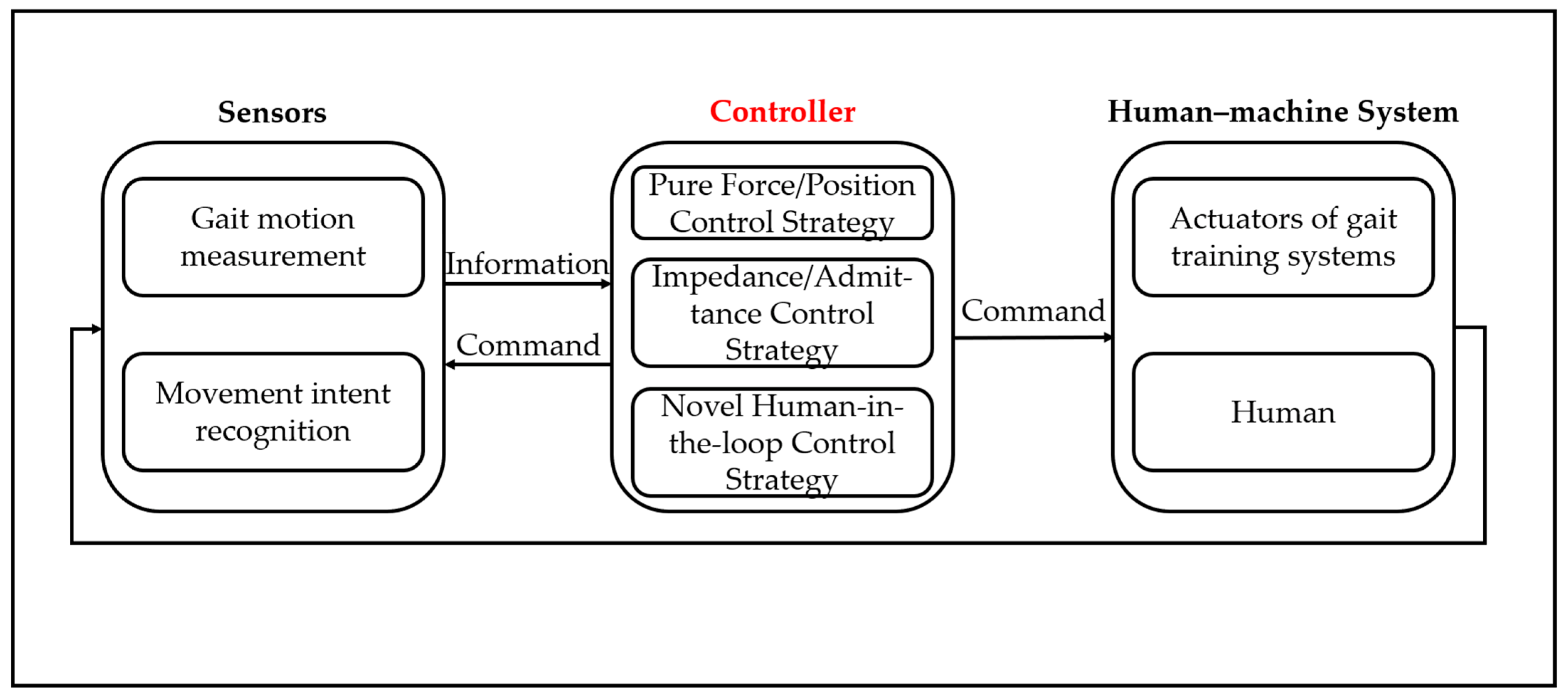
4. Control Strategy of Gait Training Systems
5. Limitations and Challenges
6. Future Directions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, N.; Yang, J.; Feng, X.; Zhang, J.; Yang, X.; Zhang, Z. A summary of 30 years’ research on risk factors of stroke mortality in China. Chin. J. Behav. Med. Brain Sci. 2017, 26, 765–768. [Google Scholar]
- Wang, L.; Liu, J.; Yang, Y.; Peng, B.; Wang, Y. China Stroke Prevention still faces Great Challenges: China Stroke Prevention Report 2018 Summary. China Circ. J. 2019, 34, 2. [Google Scholar]
- Balaban, B.; Tok, F. Gait Disturbances in Patients With Stroke. Pmr 2014, 6, 635–642. [Google Scholar] [CrossRef] [PubMed]
- Ye, J.; Chen, G.; Liu, Q.; Duan, L.; Wang, C. Gait Phase Estimation for FES Based on Pelvic Movement of a Novel Gait Rehabilitation Robot. In Proceedings of the 2018 IEEE International Conference on Real-time Computing and Robotics (RCAR), Kudahuvadhoo, Maldives, 1–5 August 2018; IEEE: New York, NY, USA, 2018; pp. 532–537. [Google Scholar]
- Seo, W.; Kwon, J.H.; Ko, Y.; Hong, D. An Assistive Control Strategy Using Arm Swing Information for 1DoF Hip Exoskeleton for Hemiplegic Gait Rehabilitation. J. Korean Soc. Precis. Eng. 2019, 36, 419–424. [Google Scholar] [CrossRef]
- Qin, T.; Meng, X.; Qiu, J.; Zhu, D.; Zhang, J. Dynamics Analysis of the Human-Machine System of the Assistive Gait Training Robot. In Intelligent Robotics and Applications, ICIRA; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11745. [Google Scholar]
- Swank, C.; Trammell, M.; Bennett, M. The utilization of an overground robotic exoskeleton for gait training during inpatient rehabilitation-single-center retrospective findings. Int. J. Rehabil. Res. 2020, 43, 206–213. [Google Scholar] [CrossRef]
- Afzal, T.; Tseng, S.; Lincoln, J.; Kern, M. Exoskeleton-assisted Gait Training in Persons With Multiple Sclerosis: A Single-Group Pilot Study. Arch. Phys. Med. Rehabil. 2020, 101, 599–606. [Google Scholar] [CrossRef]
- Hoyer, E.; Opheim, A. Implementing the exoskeleton Ekso GTTM for gait rehabilitation in a stroke unit–feasibility, functional benefits and patient experiences. Disabil. Rehabil. Assist. Technol. 2020. [Google Scholar] [CrossRef]
- Wang, F.C.; Li, Y.C.; Wu, K.L.; Chen, P.Y.; Fu, L.C. Online gait detection with an automatic mobile trainer inspired by neuro-developmental treatment. Sensors 2020, 20, 3389. [Google Scholar] [CrossRef]
- Ma, W.; Huang, R.; Chen, Q.; Song, G.; Li, C. Dynamic Movement Primitives based Parametric Gait Model for Lower Limb Exoskeleton. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–30 July 2020; pp. 3857–3862. [Google Scholar]
- Ji, J.; Wang, Y.; Zhang, G.; Lin, Y.; Wang, G. Design and Simulation Analysis of a Robot-Assisted Gait Trainer with the PBWS System. J. Healthc. Eng. 2021, 2021, 2750936. [Google Scholar] [CrossRef]
- Liang, P.; Hou, Z.; Wang, C.; Luo, L.; Wang, W. Rehabilitation-assisted robot and their physical human-computer interaction methods. J. Autom. 2018, 44, 2000–2010. [Google Scholar]
- Jensen, R.R.; Paulsen, R.R.; Larsen, R. Analysis of gait using a treadmill and a time-of-flight camera. In Proceedings of the Workshop on Dynamic 3D Vision, Jena, Germany, 9 September 2009. [Google Scholar]
- Veilleux, L.N.; Raison, M.; Rauch, F.; Robert, M.; Ballaz, L. Agreement of spatio-temporal gait parameters between a vertical ground reaction force decomposition algorithm and a motion capture system. Gait Posture 2016, 43, 257–264. [Google Scholar] [CrossRef]
- Zeng, D.; Qu, C.; Ma, T. Research on a gait detection system and recognition algorithm for lower limb exoskeleton robot. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 298. [Google Scholar] [CrossRef]
- Mazhar, O.; Bari, A.Z.; Faudzi, A. Real-time gait phase detection using wearable sensors. In Proceedings of the Control Conference, Chengdu, China, 27–29 July 2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Trkov, M.; Chen, K.; Yi, J.; Liu, T. Inertial Sensor-Based Slip Detection in Human Walking. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1399–1411. [Google Scholar] [CrossRef]
- Li, G.; Song, J.; Wang, X.; Lan, F.; Zou, F. Research on Lower Limb Exoskeleton Based on Multi-Sensor Information Mature Technology. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019; pp. 808–813. [Google Scholar]
- Xie, L.; Huang, L. Wirerope-driven exoskeleton to assist lower-limb rehabilitation of hemiplegic patients by using motion capture. Assem. Autom. 2020, 40, 48–54. [Google Scholar] [CrossRef]
- Bao, W.; Villarreal, D.; Chiao, J. Vision-Based Autonomous Walking in a Lower-Limb Powered Exoskeleton. In Proceedings of the 2020 IEEE 20th International Conference on Bioinformatics and Bioengineering (BIBE), Cincinnati, OH, USA, 26–28 October 2020; pp. 830–834. [Google Scholar]
- Steinert, A.; Sattler, I.; Otte, K.; Röhling, H.; Mansow-Model, S.; Müller-Werdan, U. Using New Camera-Based Technologies for Gait Analysis in Older Adults in Comparison to the Established GAITRite System. Sensors 2020, 20, 125. [Google Scholar] [CrossRef] [Green Version]
- Tran, T.-H.; Nguyen, D.T.; Phuong Nguyen, T. Human Posture Classification from Multiple Viewpoints and Application for Fall Detection. In Proceedings of the 2020 IEEE Eighth International Conference on Communications and Electronics (ICCE), Phu Quoc Island, Vietnam, 13–15 January 2021; pp. 262–267. [Google Scholar]
- Toshev, A.; Szegedy, C. DeepPose: Human Pose Estimation via Deep Neural Networks. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Lee, B.; Kim, J.; Jung, S.-U. Light-weighted Network based Human Pose Estimation for Mobile AR Service. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 21–23 October 2020; pp. 1609–1612. [Google Scholar]
- Schicketmueller, A.; Rose, G.; Hofmann, M. Feasibility of a Sensor-Based Gait Event Detection Algorithm for Triggering Functional Electrical Stimulation during Robot-Assisted Gait Training. Sensors 2019, 19, 4804. [Google Scholar] [CrossRef] [Green Version]
- Martini, E.; Crea, S.; Parri, A.; Bastiani, L.; Faraguna, U.; McKinney, Z.; Molino-Lova, R.; Pratali, L.; Vitiello, N. Gait training using a robotic hip exoskeleton improves metabolic gait efficiency in the elderly. Sci Rep. 2019, 9, 7157. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Afzal, M.R.; Pyo, S.; Yoon, J. A Novel Gait Assistance System Based on an Active Knee Orthosis and a Haptic Cane for Overground Walking. In Converging Clinical and Engineering Research on Neurorehabilitation III; Springer: Berlin/Heidelberg, Germany, 2019; Volume 21, pp. 439–443. [Google Scholar]
- Schicketmueller, A.; Lamprecht, J.; Hofmann, M.; Sailer, M.; Rose, G. Gait Event Detection for Stroke Patients during Robot-Assisted Gait Training. Sensors 2020, 20, 3399. [Google Scholar] [CrossRef]
- Wang, T.; Pei, X. An untethered cable-driven ankle exoskeleton with plantarflexion-dorsiflexion bidirectional movement assistance. Front. Inform. Technol. Electron. Eng. 2020, 21, 723–739. [Google Scholar] [CrossRef]
- Bae, E.; Park, S.; Moon, Y. A Robotic Gait Training System with Stair-climbing Mode Based on a Unique Exoskeleton Structure with Active Foot Plates. Int. J. Control Autom. Syst. 2020, 18, 196–205. [Google Scholar] [CrossRef]
- Livolsi, C.; Conti, R.; Giovacchini, F.; Vitiello, N.; Crea, S. A Novel Wavelet-Based Gait Segmentation Method for a Portable hip Exoskeleton. IEEE Trans. Robot. 2021, 1–15. [Google Scholar] [CrossRef]
- Bae, J.; Lee, J. Design Of A Control System For A Lower-Limb Exoskeleton Rehabilitation Robot With Gait Phase Detection Algorithm Using Inertial Sensor. Assist. Technol. 2021, 33, 166. [Google Scholar]
- Chen, S.; Bangaru, S.S.; Yigit, T.; Trkov, M.; Wang, C.; Yi, J. Real-Time Walking Gait Estimation for Construction Workers using a Single Wearable Inertial Measurement Unit (IMU). In Proceedings of the 2021 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Delft, The Netherlands, 12–16 July 2021; pp. 753–758. [Google Scholar]
- Yang, C.; Wang, X.; Mao, S. RFID-Pose: Vision-Aided Three-Dimensional Human Pose Estimation With Radio-Frequency Identification. IEEE Trans. Reliab. 2021, 70, 1218–1231. [Google Scholar] [CrossRef]
- Zhao, M.; Liu, Y.; Raghu, A.; Zhao, H.; Katabi, D. Through-Wall Human Mesh Recovery Using Radio Signals. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Meng, W.; Liu, Q.; Zhou, Z.; Ai, Q.; Sheng, B.; Xie, S. Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation. Mechatronics 2015, 31, 132–145. [Google Scholar] [CrossRef]
- Zhang, T.; Huang, H. Design and Control of a Series Elastic Actuator With Clutch for Hip Exoskeleton for Precise Assistive Magnitude and Timing Control and Improved Mechanical Safety. IEEE/ASME Trans. Mechatron. 2019, 24, 2215–2226. [Google Scholar] [CrossRef]
- Liu, D.; Chen, W.; Pei, Z.; Wang, J. A brain-controlled lower-limb exoskeleton for human gait training. Rev. Sci. Instrum. 2017, 88, 104302. [Google Scholar] [CrossRef]
- Engemann, D.A.; Gramfort, A. Automated model selection in covariance estimation and spatial whitening of MEG and EEG signals. Neuroimage 2015, 108, 328–342. [Google Scholar] [CrossRef]
- Bi, L.; Xia, S.; Fei, W. Hierarchical Decoding Model of Upper Limb Movement Intention From EEG Signals Based on Attention State Estimation. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 2008–2016. [Google Scholar] [CrossRef]
- Zhuang, Y.; Yao, S.; Ma, C.; Song, R. Admittance Control Based on EMG-Driven Musculoskeletal Model Improves the Human–Robot Synchronization. IEEE Trans. Ind. Inform. 2019, 15, 1211–1218. [Google Scholar] [CrossRef]
- Zhang, L.; Ma, Y.; Wang, C.; Yan, Z.; Wu, X. A Method for Arm Motions Classification and A Lower-limb Exoskeleton Control Based on sEMG signals. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 118–123. [Google Scholar]
- Xie, H.; Li, G.; Zhao, X.; Li, F. Prediction of Limb Joint Angles Based on Multi-Source Signals by GS-GRNN for Exoskeleton Wearer. Sensors 2020, 20, 1104. [Google Scholar] [CrossRef] [Green Version]
- Rabe, K.G.; Fey, N.P. Evaluating Electromyography and Sonomyography Sensor Fusion to Estimate Lower-Limb Kinematics Using Gaussian Process Regression. Front. Robot. AI. 2022. [Google Scholar] [CrossRef] [PubMed]
- Fougner, A.; Scheme, E.; Chan, A.D.; Englehart, K.; Stavdahl, X. Resolving the Limb Position Effect in Myoelectric Pattern Recognition. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 644–651. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, B.; Mao, Y.; Han, J.; Li, X.; Ma, J. Human-robot interactive information sensing system for gait rehabilitation training robot. Chin. J. Eng. Des. 2019, 26, 252–259. [Google Scholar]
- Gong, C.; Xu, D.; Zhou, Z.; Nicola, V.; Wang, Q. BPNN-Based Real-Time Recognition of Locomotion Modes for an Active Pelvis Orthosis with Different Assistive Strategies. Int. J. Hum. Robot. 2020, 17, 2050004. [Google Scholar] [CrossRef]
- Zhu, L.; Wang, Z.; Ning, Z.; Zhang, Y.; Liu, Y.; Cao, W.; Wu, X.; Chen, C. A Novel Motion Intention Recognition Approach for Soft Exoskeleton via IMU. Electronics 2020, 9, 2176. [Google Scholar] [CrossRef]
- Pinheiro, C.; Figueiredo, J.; Magalhães, N.; Santos, C.P. Wearable Biofeedback Improves Human-Robot Compliance during Ankle-Foot Exoskeleton-Assisted Gait Training: A Pre-Post Controlled Study in Healthy Participants. Sensors 2020, 20, 5876. [Google Scholar] [CrossRef]
- Xu, W.; Huang, J.; Yan, Q.; Wang, Y.; Tao, C. Flexible and Safe Robot Movement Control Research. J. Autom. 2016, 42, 1859–1873. [Google Scholar]
- Mora-Tola, E.; Loja-Duchi, J.; Ordoñez-Torres, A.; Vázquez-Rodas, A.; Astudillo-Salinas, F.; Minchala, L.I. Robotic Knee Exoskeleton Prototype to Assist Patients in Gait Rehabilitation. IEEE Lat. Am. Trans. 2020, 18, 1503–1510. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, X.; Chen, B.; Wu, H. Development of a Minimal-Intervention-Based Admittance Control Strategy for Upper Extremity Rehabilitation Exoskeleton. IEEE Trans. Syst. Man Cybern Syst. 2018, 48, 1005–1016. [Google Scholar] [CrossRef]
- Duncan, P.W.; Martha, P.; Nelson, S.G. Reliability of the Fugl-Meyer assessment of sensorimotor recovery following cerebrovascular accident. Phys. Therapy 1983, 10, 1606–1610. [Google Scholar] [CrossRef]
- Salarian, A.; Russmann, H.; Vingerhoets, F.; Dehollain, C.; Blanc, Y.; Burkhard, P.; Aminian, K. Gait assessment in Parkinson’s disease: Toward an ambulatory system for long-term monitoring. IEEE Trans. Biomed. Eng. 2004, 51, 1434–1443. [Google Scholar] [CrossRef]
- Anaya-Reyes, F.; Cheng, H.; Thangavel, P.; Yu, H. The Shared Effects of Active Body Weight Support and Robot-Applied Resistance/Assistance on Temporal Gait Parameters and Gait Related Muscle Activity. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 8–20 July 2018; pp. 386–391. [Google Scholar]
- Alberto, R.; Martina, F.; Tommaso, S.; Susanna, S.; Silvia, M.; Adele, D.; Michela, C.; Maurizio, P.; Enrico, C.; Enrico, B.; et al. Evaluation of gait in Duchenne Muscular Dystrophy: Relation of 3D gait analysis to clinical assessment. Neuromuscul. Disord. 2019, 29, 920–929. [Google Scholar]
- Ma, Y.; Wu, X.; Wang, C.; Yi, Z.; Liang, G. Gait Phase Classification and Assist Torque Prediction for a Lower Limb Exoskeleton System Using Kernel Recursive Least-Squares Method. Sensors 2019, 19, 5449. [Google Scholar] [CrossRef] [Green Version]
- Chomiak, T.; Sidhu, A.S.; Watts, A.; Su, L.; Graham, B.; Wu, J.; Classen, S.; Falter, B.; Hu, B. Development and Validation of Ambulosono: A Wearable Sensor for Bio-Feedback Rehabilitation Training. Sensors 2019, 19, 686. [Google Scholar] [CrossRef] [Green Version]
- Tran, V.-T.; Sasaki, K.; Yamamoto, S.-I. Influence of Body Weight Support Systems on the Abnormal Gait Kinematic. Appl. Sci. 2020, 10, 4685. [Google Scholar] [CrossRef]
- Park, C.; Oh-Park, M.; Bialek, A. Abnormal synergistic gait mitigation in acute stroke using an innovative ankle–knee–hip interlimb humanoid robot: A preliminary randomized controlled trial. Sci. Rep. 2021, 11, 22823. [Google Scholar] [CrossRef]
- Sconza, C.; Negrini, F.; Di Matteo, B.; Borboni, A.; Boccia, G.; Petrikonis, I.; Stankevičius, E.; Casale, R. Robot-Assisted Gait Training in Patients with Multiple Sclerosis: A Randomized Controlled Crossover Trial. Medicina 2021, 57, 713. [Google Scholar] [CrossRef]
- Choi, M.; Ahn, N.; Park, J.; Kim, K. 12-Week Exercise Training of Knee Joint and Squat Movement Improves Gait Ability in Older Women. Int. J. Environ. Res. Public Health 2021, 18, 1515. [Google Scholar] [CrossRef]
- Yeon-Gyo, N.; Jin, W.L.; Jin, W.P.; Ho, J.L.; Ki, Y.N.; Jun, H.P.; Chang, S.Y.; Myong, R.C.; Bum, S.K. Effects of Electromechanical Exoskeleton-Assisted Gait Training on Walking Ability of Stroke Patients: A Randomized Controlled Trial. Arch. Phys. Med. Rehabil. 2019, 100, 26–31. [Google Scholar]
- Wang, Y.; Mukaino, M.; Hirano, S.; Tanikawa, H.; Yamada, J.; Ohtsuka, K.; Ii, T.; Saitoh, E.; Otaka, Y. Persistent Effect of Gait Exercise Assist Robot Training on Gait Ability and Lower Limb Function of Patients With Subacute Stroke: A Matched Case–Control Study With Three-Dimensional Gait Analysis. Front. Neurorobot. 2020, 14, 42. [Google Scholar] [CrossRef]
- Tamburella, F.; Tagliamonte, N.L. Neuromuscular Controller Embedded in a Powered Ankle Exoskeleton: Effects on Gait, Clinical Features and Subjective Perspective of Incomplete Spinal Cord Injured Subjects. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1157–1167. [Google Scholar] [CrossRef]
- Wahid, F.; Begg, R.K.; Hass, C.J.; Halgamuge, S.; Ackland, D.C. Classification of Parkinson’s Disease Gait Using Spatial-Temporal Gait Features. IEEE J. Biomed. Health Inform. 2015, 19, 1794. [Google Scholar] [CrossRef]
- Rehman, R.Z.U.; Din, S.D.; Guan, Y.; Yarnall, A.J.; Shi, J.Q.; Rochester, L. Selecting Clinically Relevant Gait Characteristics for Classification of Early Parkinson’s Disease: A Comprehensive Machine Learning Approach. Sci. Rep. 2019, 9, 17269. [Google Scholar] [CrossRef] [Green Version]
- Herfurth, M.; Godau, J.; Kattner, B.; Rombach, S.; Grau, S.; Maetzler, W.; Berg, D. Gait velocity and step length at baseline predict outcome of Nordic walking training in patients with Parkinson’s disease. Parkinsonism Relat. Disord. 2015, 21, 413–416. [Google Scholar] [CrossRef]
- Carlotta, C.; Diego, T.; Maurizio, S.; Adriana, M.; Jose, G.; Francisco, G.; Jose, P. IMU-Based Classification of Parkinson’s Disease From Gait: A Sensitivity Analysis on Sensor Location and Feature Selection. IEEE J. Biomed. Health Inform. 2018, 22, 1765–1774. [Google Scholar]
- Wang, L.; Sun, Y.; Li, Q.; Liu, T.; Yi, J. Two Shank-Mounted IMUs-Based Gait Analysis and Classification for Neurological Disease Patients. IEEE Robot. Autom. Lett. 2020, 5, 1976–1979. [Google Scholar] [CrossRef]
- Skvortsov, D.V.; Kaurkin, S.N.; Ivanova, G.E. A Study of Biofeedback Gait Training in Cerebral Stroke Patients in the Early Recovery Phase with Stance Phase as Target Parameter. Sensors 2021, 21, 7217. [Google Scholar] [CrossRef]
- Saito, H.; Yokoyama, H.; Sasaki, A.; Kato, T.; Nakazawa, K. Flexible Recruitments of Fundamental Muscle Synergies in the Trunk and Lower Limbs for Highly Variable Movements and Postures. Sensors 2021, 21, 6186. [Google Scholar] [CrossRef] [PubMed]
- Cheung Vincent, C.K.; Turolla, A.; Agostini, M.; Silvoni, S.; Bennis, C.; Kasi, P.; Paganoni, S.; Bonato, P.; Bizzi, E. Muscle synergy patterns as physiological markers of motor cortical damage. Proc. Natl. Acad. Sci. USA 2012, 109, 14652–14656. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Safavynia, S.; Torres-Oviedo, G.; Ting, L. Muscle Synergies: Implications for Clinical Evaluation and Rehabilitation of Movement. Top. Spinal Cord Inj. Rehabil. 2011, 17, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Rinaldi, L.; Yeung, L.F.; Lam, C.H.; Pang, M.; Cheung, V. Adapting to the Mechanical Properties and Active Force of an Exoskeleton by Altering Muscle Synergies in Chronic Stroke Survivors. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2203–2213. [Google Scholar] [CrossRef]
- Longatelli, V.; Pedrocchi, A.; Guanziroli, E. Robotic Exoskeleton Gait Training in Stroke: An Electromyography-Based Evaluation. Front. Neurorobot. 2021, 15, 733738. [Google Scholar] [CrossRef]
- Seo, J.-W.; Kim, H.-S. Biomechanical Analysis in Five Bar Linkage Prototype Machine of Gait Training and Rehabilitation by IMU Sensor and Electromyography. Sensors 2021, 21, 1726. [Google Scholar] [CrossRef]
- Li, T.; Li, Q.; Liu, T. An actuated dissipative spring-mass walking model: Predicting human-like ground reaction forces and the effects of model parameters. J. Biomech. 2019, 90, 58–64. [Google Scholar] [CrossRef]
- Smyrli, A.; Papadopoulos, E. A methodology for the incorporation of arbitrarily-shaped feet in passive bipedal walking dynamics. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8719–8725. [Google Scholar]
- Cifuentes, C.A.; Rodriguez, C.; Frizera-Neto, A.; Bastos, T.F.; Carelli, R. Multimodal Human–Robot Interaction for Walker-Assisted Gait. IEEE Syst. J. 2017, 10, 933–943. [Google Scholar] [CrossRef]
- Kolaghassi, R.; Al-Hares, M.K.; Sirlantzis, K. Systematic Review of Intelligent Algorithms in Gait Analysis and Prediction for Lower Limb Robotic Systems. IEEE Access 2021, 9, 113788–113812. [Google Scholar] [CrossRef]
- Hu, X.; Zeng, X.; Xu, Y. A Soft Robotic Intervention for Gait Enhancement in Older Adults. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 1838–1847. [Google Scholar] [CrossRef]
- Yu, H.; Spenko, M.; Dubowsky, S. An Adaptive Shared Control System for an Intelligent Mobility Aid for the Elderly. Auton. Robot. 2003, 15, 53–66. [Google Scholar] [CrossRef]
- Tao, W.; Zhang, J.; Li, G.; Liu, T.; Liu, F.; Yi, J. A wearable sensor system for lower-limb rehabilitation evaluation using the GRF and CoP distributions. Meas. Sci. Technol. 2015, 27, 025701. [Google Scholar] [CrossRef]
- Ye, J.; Chen, G.; Liu, Q. An Adaptive Shared Control of a Novel Robotic Walker for Gait Rehabilitation of Stroke Patients. In Proceedings of the 2018 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Shenyang, China, 24–27 August 2018; pp. 373–378. [Google Scholar]
- Miyake, T.; Kobayashi, Y.; Fujie, M.G.; Sugano, S. Intermittent Force Application of Wire-Driven Gait Training Robot to Encourage User to Learn an Induced Gait. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 433–438. [Google Scholar]
- Zhao, D.; Yang, J.; Okoye, M.O.; Wang, S. Walking Assist Robot: A Novel Non-Contact Abnormal Gait Recognition Approach Based on Extended Set Membership Filter. IEEE Access 2019, 7, 76741–76753. [Google Scholar] [CrossRef]
- Mu, Z.; Fang, J.; Zhang, Q. Admittance Control of the Ankle Mechanism in a Rotational Orthosis for Walking with Arm Swing. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 709–714. [Google Scholar]
- Guo, B.; Han, J.; Li, X.; Yan, L. Human-robot interactive control based on reinforcement learning for gait rehabilitation training robot. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419839584. [Google Scholar]
- Kim, J.Y.; Kim, J.J.; Park, K. Gait Training Algorithm of an End-Effector Typed Hybrid Walking Rehabilitation Robot. Int. J. Precis. Eng. Manuf. 2019, 20, 1767–1775. [Google Scholar] [CrossRef]
- Mu, Z.; Zhang, Q.; Yang, G.; Xie, L.; Fang, J. Development of an Improved Rotational Orthosis for Walking With Arm Swing and Active Ankle Control. Front. Neurorobot. 2020, 14, 17. [Google Scholar] [CrossRef] [Green Version]
- Shunki, I.; Jun, N.; Yasuhisa, H.; Toshio, F.; Masanori, T.; Izumi, K. Admittance control based robotic clinical gait training with physiological cost evaluation. Robot. Auton. Syst. 2020, 123, 103326. [Google Scholar]
- Zhang, Y.; Li, S.; Nolan, K.J.; Zanotto, D. Reinforcement Learning Assist-as-needed Control for Robot Assisted Gait Training. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; pp. 785–790. [Google Scholar]
- Zhong, B.; Cao, J.; Guo, K.; Andrew, M.; Peng, Y.; Miao, Q.; Xie, S.; Zhang, M. Fuzzy logic compliance adaptation for an assist-as-needed controller on the Gait Rehabilitation Exoskeleton (GAREX). Robot. Auton. Syst. 2020, 133, 103642. [Google Scholar] [CrossRef]
- Hidayah, R.; Bishop, L.; Jin, X.; Chamarthy, S.; Stein, J.; Agrawal, S.K. Gait Adaptation Using a Cable-Driven Active Leg Exoskeleton (C-ALEX) With Post-Stroke Participants. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1984–1993. [Google Scholar] [CrossRef]
- Lopes, J.; Pinheiro, C.; Figueiredo, J.; Reis, L.P.; Santos, C.P. Assist-as-needed Impedance Control Strategy for a Wearable Ankle Robotic Orthosis. In Proceedings of the 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Ponta Delgada, Portugal, 15–17 April 2020; pp. 10–15. [Google Scholar]
- Zhang, H.; Yin, Y.; Chen, Z.; Zhang, Y.; Rao, A.K.; Guo, Y.; Zanotto, D. Wearable Biofeedback System to Induce Desired Walking Speed in Overground Gait Training. Sensors 2020, 20, 4002. [Google Scholar] [CrossRef]
- Scheidig, A.; Schütz, B.; Trinh, T.Q.; Vorndran, A.; Mayfarth, A.; Sternitzke, C.; Röhner, E.; Gross, H.-M. Robot-Assisted Gait Self-Training: Assessing the Level Achieved. Sensors 2021, 21, 6213. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Wu, X. Online Gait Planning of Lower-Limb Exoskeleton Robot for Paraplegic Rehabilitation Considering Weight Transfer Process. IEEE Trans. Autom. Sci. Eng. 2021, 18, 414–425. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, Q.; Xiong, H. Control and Implementation of 2-DOF Lower Limb Exoskeleton Experiment Platform. Chin. J. Mech. Eng. 2021, 34, 22. [Google Scholar] [CrossRef]
- Mayag, L.J.A.; Múnera, M.; Cifuentes, C.A. Human-in-the-Loop Control for AGoRA Unilateral Lower-Limb Exoskeleton. J. Intell Robot Syst. 2022, 104, 3. [Google Scholar] [CrossRef]
- Inoue, J.; Kimura, R. Development of a Gait Rehabilitation Robot Using an Exoskeleton and Functional Electrical Stimulation: Validation in a Pseudo-paraplegic Model. Prog. Rehabil. Med. 2022, 7, 20220001. [Google Scholar] [CrossRef]
- Gianluca, L.; Caroline, P.B. Pelvic floor muscle training and postural balance in elderly women: An exploratory single arm trial. J. Bodyw. Mov. Ther. 2022, 29, 279–285. [Google Scholar]
- Nevisipour, M.; Honeycutt, C.F. Investigating the underlying biomechanical mechanisms leading to falls in long-term ankle-foot orthosis and functional electrical stimulator users with chronic stroke. Gait Posture 2022, 92, 144–152. [Google Scholar] [CrossRef]
- Riener, R.; Lünenburger, L.; Maier, I.C.; Colombo, G.; Dietz, V. Locomotor Training in Subjects with Sensori-Motor Deficits: An Overview of the Robotic Gait Orthosis Lokomat. J. Healthc. Eng. 2010, 1, 517674. [Google Scholar] [CrossRef] [Green Version]
- Loredana, R.; Roberto, P.; Flavia, O.; Alfredo, M.; Francesco, C.; Rocco, S.C. A multidisciplinary advanced approach in central pontine myelinolysis recovery: Considerations about a case report. Disabil. Rehabil. Assist. Technol. 2020. [Google Scholar] [CrossRef]
- Portaro, S.; Ciatto, L.; Raciti, L.; Aliberti, E.; Aliberti, R.; Naro, A.; Calabrò, R.S. A Case Report on Robot-Aided Gait Training in Primary Lateral Sclerosis Rehabilitation: Rationale, Feasibility and Potential Effectiveness of a Novel Rehabilitation Approach. Innov Clin. Neurosci. 2021, 18, 15–19. [Google Scholar]
- Naro, A.; Billeri, L.; Manuli, A. Breaking the ice to improve motor outcomes in patients with chronic stroke: A retrospective clinical study on neuromodulation plus robotics. Neurol Sci. 2021, 42, 2785–2793. [Google Scholar] [CrossRef]
- Alshamaa, D.; Soubra, R.; Chkeir, A. A Radar Sensor for Automatic Gait Speed Analysis in Walking Tests. IEEE Sens. J. 2021, 21, 13886–13894. [Google Scholar] [CrossRef]
- Di Nardo, F.; Cucchiarelli, A.; Scalise, L.; Morbidoni, C. Measurement of Stride Time by Machine Learning: Sensitivity Analysis for the Simplification of the Experimental Protocol. IEEE Trans. Instrum. Meas. 2022, 71, 1–9. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Study | Sensing Techniques | Advantages | Challenges |
|---|---|---|---|
| Jensen et al. [14] | One camera | Motion capture systems represented by Vicon are currently regarded as the “gold standard” for motion capture by their high accuracy | Greatly affected by the environment, high system complexity, difficult to install, and privacy issues |
| Xie et al. [20] | Three noncontact cameras | ||
| Bao et al. [21] | Pupil Labs eye tracking system | ||
| Steinert et al. [22] | 2D smartphone camera | ||
| Tran et al. [23] | Seven Kinect sensors(cameras) | ||
| Toshev et al. [24] | Images taken by a camera | ||
| Yang et al. [35] | Radio-frequency identification (RFID) tags | Measure in the presence of occlusions, baggy clothes, and bad lighting conditions | Decoupling of RF signals of human–machine coordinated movement |
| Zhao et al. [36] | Radio frequency (RF) signals from RF-Avatar | ||
| Veilleux et al. [15] | Six large force platforms | No image information will be left, and user privacy will not be violated | Only in the laboratory |
| Zeng et al. [16] | Smart sensor shoes | Unrestricted use environment, simple to use, user privacy will not be violated | May intervene with the normal motion, difficulties in obtaining displacement and relative pose of human–machine |
| Mazhar et al. [17] | A flex sensor on a leather shoe | ||
| Trkov et al. [18] | inertial sensors on lower limbs | ||
| Li et al. [19] | Designed strain gauge on leg | ||
| Schicketmueller et al. [26,29] | Inertial measurement units | ||
| Martini et al. [27] | Embedded joint angle sensors | Unrestricted use environment, simple to use, user privacy will not be violated | May intervene with the normal motion, difficulties in obtaining displacement and relative pose of human–machine |
| Wang et al. [30] | Foot pressure sensor and IMU | ||
| Bae et al. [31] | Force sensors in the foot plates | ||
| Livolsi et al. [32] | Hip encoders, pressure-insoles | ||
| Bae et al. [33] | Inertial measurement units | ||
| Chen et al. [34] | A single IMU |
| Intent Recognition Methods | Study | Characteristic |
|---|---|---|
| Electroencephalogram (EEG) signal method | Liu et al. [39] | High accuracy: 80.16 ± 5.44% |
| Engemann et al. [40] | The best model depends on noise | |
| Bi et al. [41] | To recognize intention under the attended and distracted states | |
| Electromyographic (EMG) signal method | Zhuang et al. [42] | Proved to be better than interaction-torque based method |
| Zhang et al. [43] | Back Propagation (BP) neural network was used | |
| Xie et al. [44] | General regression neural network optimized by golden section algorithm was used | |
| Rabe et al. [45] | Anterior sonomyography sensor fusion with surface EMG | |
| Fougner et al. [46] | 3.8~18% average classification error due to muscle fatigue | |
| Mora-Tola et al. [52] | Artificial Neural Network (ANN) algorithms were used | |
| Kinetic signals method | Guo et al. [47] | A robot dynamics model including the active force of human was established, and contact force was used to analyze intention |
| Pinheiro et al. [50] | The interaction torque’s direction and magnitude were both used | |
| Xu et al. [51] | A compliance control algorithm based on intent was proposed | |
| Wu et al. [53] | A minimal-intervention-based admittance control strategy was developed | |
| Kinematic signals method | Gong et al. [48] | Two IMUs and an imbedded BPNN-based algorithm were used |
| Zhu et al. [49] | Recognition accuracy rate can reach 97.64% |
| Study | Sensors Used | Features Used in Gait Evaluation | Real-Time |
|---|---|---|---|
| Anaya-Reyes et al. [56] | Vicon MX T20 | Step phase durations and cadence | − |
| Alberto et al. [57] | 3-D motion capture system | Stride width and gait velocity | − |
| Ma et al. [58] | Three Force Sense Resistors | Knee and hip joints and FSRs data | − |
| Chomiak et al. [59] | Ambulosono system | Step length, distance traveled, velocity, and cadence | + |
| Tran et al. [60] | A motion capture system and four force sensors | Center of mass, the center of pressure, and step parameters | − |
| Park et al. [61] | Force sensors | Angles, active force, and resistive force | − |
| Sconza et al. [62] | Dynamometer | Knee extensor strength, double-time support, and step length ratio | − |
| Wang et al. [65] | 3-D motion capture system | Cadence and single stance time | − |
| Tamburella et al. [66] | Angle sensors | Gait speed | − |
| Wahid et al. [67] | 8-camera video motion analysis system | Stride length, step length, and double support time | − |
| Rehman et al. [68] | GAITRite instrument | Step velocity and step length | − |
| Carlotta et al. [70] | Inertial measurement units (IMU) | Step length, step time, and stride speed | − |
| Wang et al. [71] | Inertial measurement units (IMU) | Right spatial-temporal and kinematic gait parameters | + |
| Skvortsov et al. [72] | Neurosens inertial sensors | Knee and hip joint range of motion | − |
| Cheung et al. [74] | EMG sensors | EMG signals (muscle activity) | − |
| Safavynia et al. [75] | − | ||
| Longatelli et al. [77] | − | ||
| Rinaldi et al. [76] | EMG sensors, Vicon, and force platform | Both gait parameters and muscle activity | − |
| Seo et al. [78] | EMG sensors and IMU | − |
| Device Name | Control Strategy | References |
|---|---|---|
| Gait rehabilitation device | Open-loop position control based on GRFs | Tao et al. [85] |
| Novel Robotic Walker | Position control based on gait event | Ye et al. [86] |
| Gait Training Robot | Force control method based on gait event | Miyake et al. [87] |
| Walking Assist Robot | Position control based on fall detection | Zhao et al. [88] |
| Hybrid Rehabilitation Robot | Manually changed training modes and speed control | Kim et al. [91] |
| C-ALEX | Open-loop force control base on gait event | Hidayah et al. [96] |
| Gait Assist Robot | Training mode switch based on task and gait feature | Scheidig et al. [99] |
| Lower-Limb Exoskeleton | Speed control based on gait parameters | Ma et al. [100] |
| Intelligent Mobility Aid | Admittance-based mobility controller | Yu et al. [84] |
| Rotational Orthosis | Admittance control of the ankle mechanism | Mu et al. [89] |
| Gait rehabilitation robot | Adaptive admittance control based on interactive force | Guo et al. [90] |
| Improved rotational orthosis | Admittance control based on ankle force | Mu et al. [92] |
| Clinic gait training robot | Admittance control based on relative position | Shunki et al. [93] |
| 2-DOF Exoskeleton | Admittance control based on interactive force | Chen et al. [101] |
| Robot Assisted Gait Training | Assist-as-needed Control based on prediction | Zhang et al. [94] |
| GAREX | Logic compliance adaptation and assist-as-needed | Zhong et al. [95] |
| Ankle Robotic Orthosis | Assist-as-needed Impedance Control Strategy | Lopes et al. [97] |
| Biofeedback Exoskeleton | Speed control based on predicted user response | Zhang et al. [98] |
| AGoRA | Closed-loop control based on intention and gait feature | Mayag et al. [102] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Y.; Liu, C.; Zhang, B.; Zhang, N.; Wang, S.; Han, M.; Ferreira, J.P.; Liu, T.; Zhang, X. Measurement, Evaluation, and Control of Active Intelligent Gait Training Systems—Analysis of the Current State of the Art. Electronics 2022, 11, 1633. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics11101633
Han Y, Liu C, Zhang B, Zhang N, Wang S, Han M, Ferreira JP, Liu T, Zhang X. Measurement, Evaluation, and Control of Active Intelligent Gait Training Systems—Analysis of the Current State of the Art. Electronics. 2022; 11(10):1633. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics11101633
Chicago/Turabian StyleHan, Yi, Chenhao Liu, Bin Zhang, Ning Zhang, Shuoyu Wang, Meimei Han, João P. Ferreira, Tao Liu, and Xiufeng Zhang. 2022. "Measurement, Evaluation, and Control of Active Intelligent Gait Training Systems—Analysis of the Current State of the Art" Electronics 11, no. 10: 1633. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics11101633