
Robotic Exploration of an Unknown Nuclear Environment Using Radiation Informed Autonomous Navigation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- An online method of generating a variable value radiation costmap from nonuniform point measurements of radiation and integration of this costmap into an existing costmap based navigation stack.
- Experimental verification that our unmanned ground vehicle (UGV) can autonomously avoid gamma radiation in real-time, while exploring unknown environments.
- Experimental verification that CSIRO’s Navigation Pack and accompanying experimental navigation stack can navigate obstacles and topography in varied and complex environments.
2. Hardware Architecture
3. The CSIRO Navigation Stack
3.1. SLAM Pipeline
3.2. Local Navigation
3.3. Global Navigation
4. Adding Radiation Avoidance Functionality to the Navigation Stack
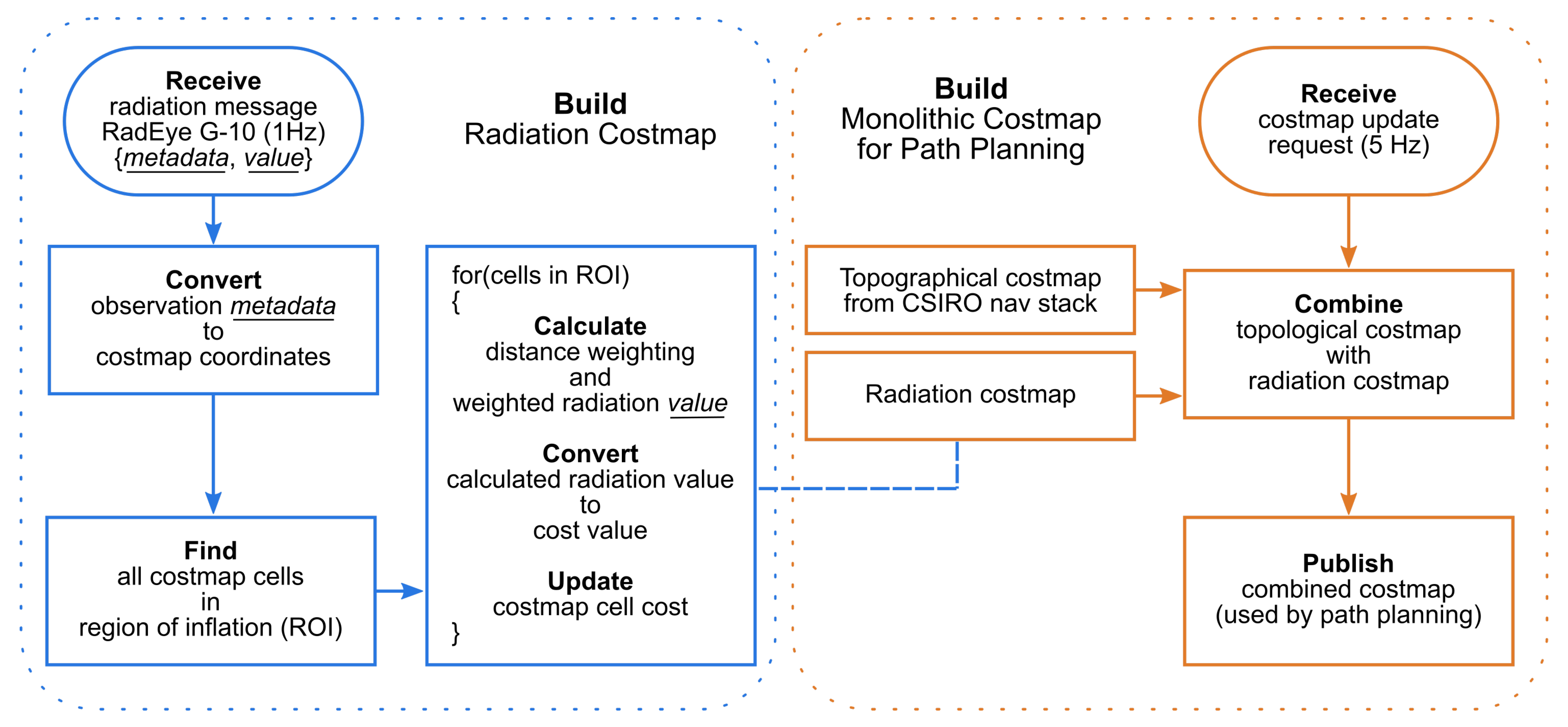
4.1. Constructing the Radiation Costmap
4.2. Combining Terrain and Radiation Costmaps
4.3. Recovery Behaviour
5. Experimental Validation
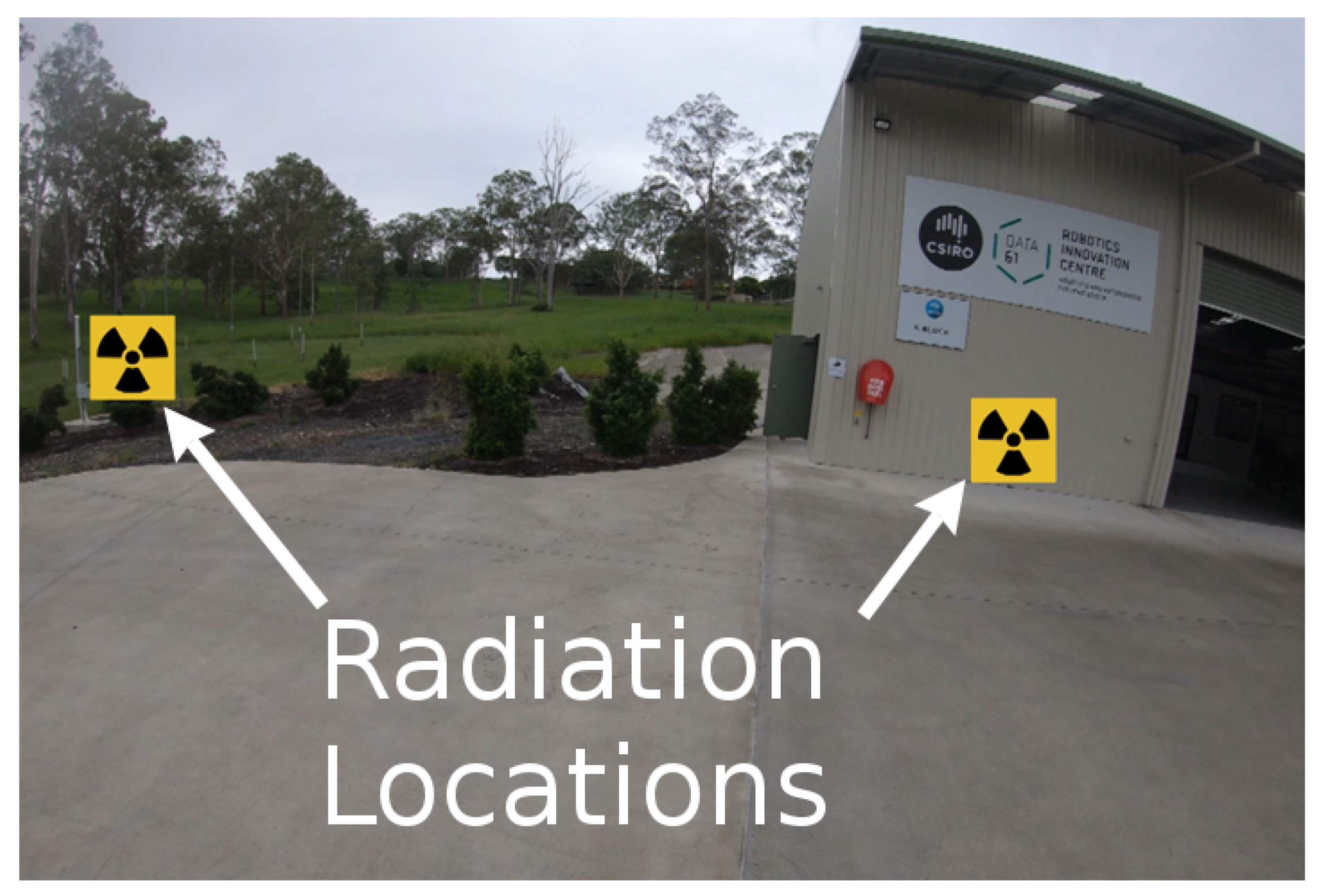
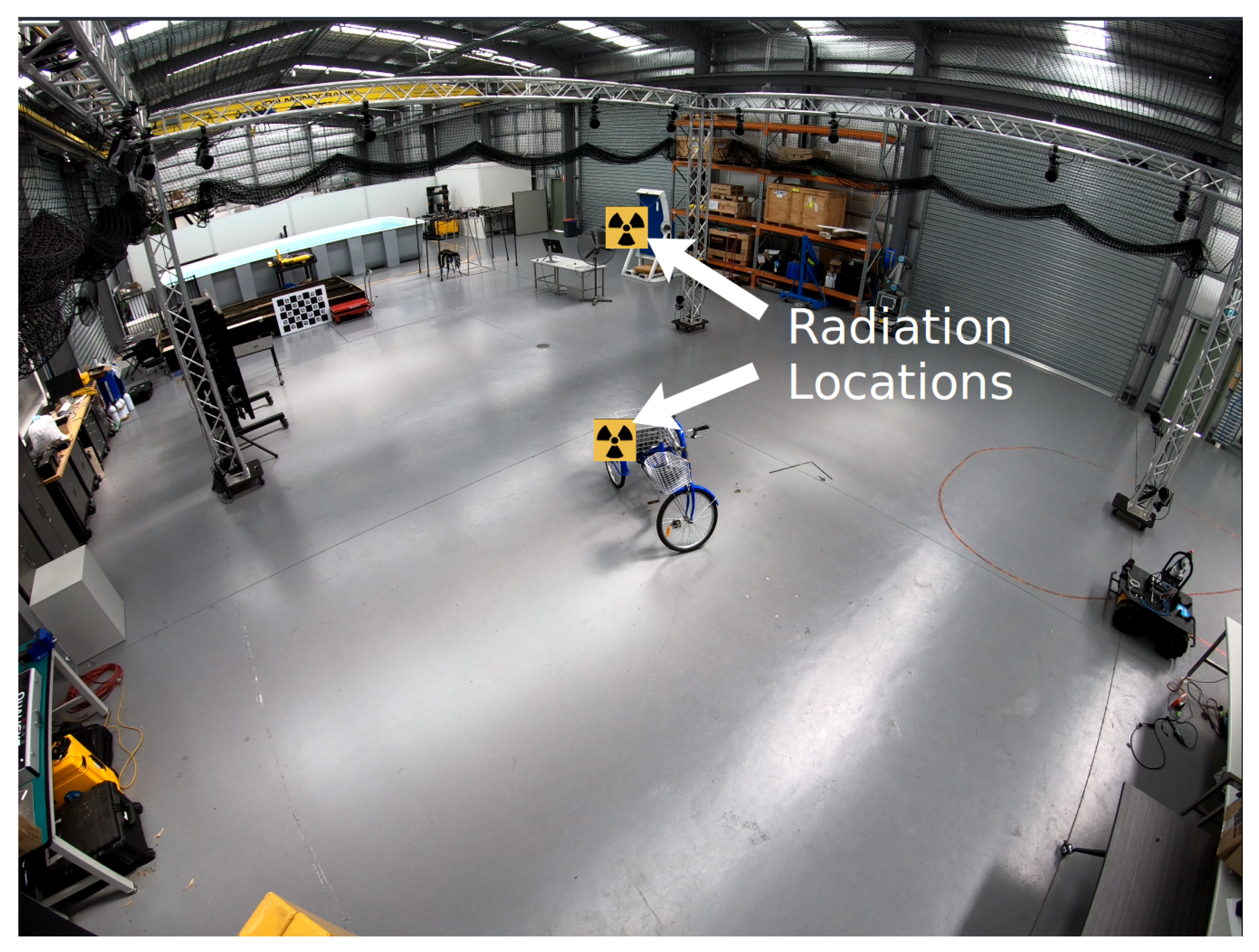
5.1. Experiment Setup
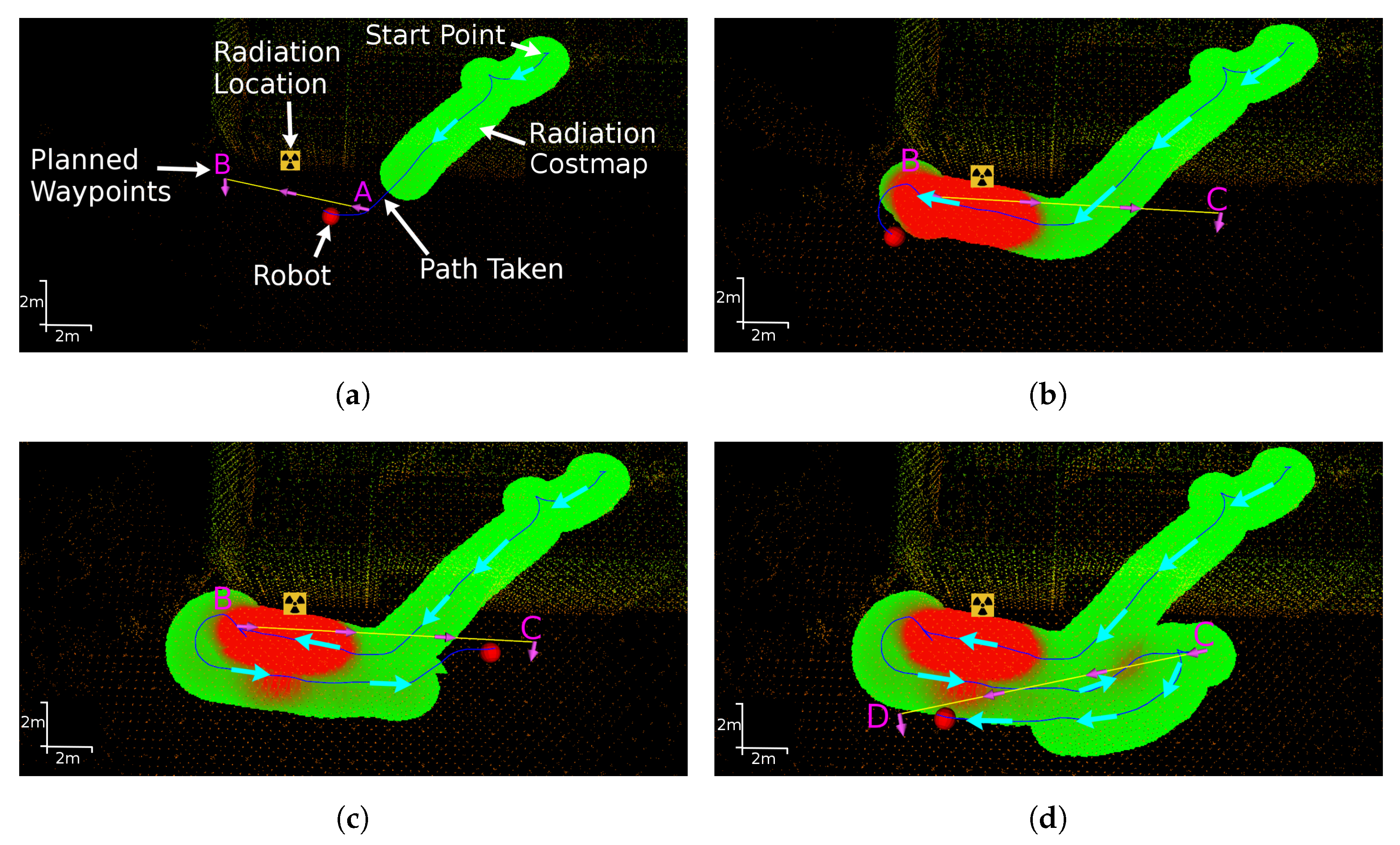
5.2. Results of Experiment 1
5.3. Results of Experiment 2
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tsitsimpelis, I.; Taylor, C.J.; Lennox, B.; Joyce, M.J. A review of ground-based robotic systems for the characterization of nuclear environments. Prog. Nucl. Energy 2019, 111, 109–124. [Google Scholar] [CrossRef]
- Nancekievill, M.; Jones, A.; Joyce, M.; Lennox, B.; Watson, S.; Katakura, J.; Okumura, K.; Kamada, S.; Katoh, M.; Nishimura, K. Development of a radiological characterization submersible rov for use at fukushima daiichi. IEEE Trans. Nucl. Sci. 2018, 65, 2565–2572. [Google Scholar] [CrossRef]
- Houssay, L.P. Robotics and Radiation Hardening in the Nuclear Industry. Master’s Thesis, University of Florida, Gainsville, FL, USA, 2000. [Google Scholar]
- Ducros, C.; Hauser, G.; Mahjoubi, N.; Girones, P.; Boisset, L.; Sorin, A.; Jonquet, E.; Falciola, J.M.; Benhamou, A. RICA: A tracked robot for sampling and radiological characterization in the nuclear field. J. Field Robot. 2017, 34, 583–599. [Google Scholar] [CrossRef] [Green Version]
- DARPA Subterranean Challenge. Available online: https://www.subtchallenge.com/ (accessed on 10 October 2020).
- Marder-Eppstein, E.; Berger, E.; Foote, T.; Gerkey, B.; Konolige, K. The Office Marathon: Robust Navigation in an Indoor Office Environment. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Nagatani, K.; Kiribayashi, S.; Okada, Y.; Otake, K.; Yoshida, K.; Tadokoro, S.; Nishimura, T.; Yoshida, T.; Koyanagi, E.; Fukushima, M.; et al. Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots. J. Field Robot. 2013, 30, 44–63. [Google Scholar] [CrossRef]
- MacFarlane, J.; Payton, O.; Keatley, A.; Scott, G.; Pullin, H.; Crane, R.; Smilion, M.; Popescu, I.; Curlea, V.; Scott, T. Lightweight aerial vehicles for monitoring, assessment and mapping of radiation anomalies. J. Environ. Radioact. 2014, 136, 127–130. [Google Scholar] [CrossRef] [PubMed]
- Martin, P.G.; Payton, O.D.; Fardoulis, J.S.; Richards, D.A.; Yamashiki, Y.; Scott, T.B. Low altitude unmanned aerial vehicle for characterising remediation effectiveness following the FDNPP accident. J. Environ. Radioact. 2016, 151, 58–63. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martin, P.G.; Kwong, S.; Smith, N.T.; Yamashiki, Y.; Payton, O.D.; Russell-Pavier, F.S.; Fardoulis, J.S.; Richards, D.A.; Scott, T.B. 3D unmanned aerial vehicle radiation mapping for assessing contaminant distribution and mobility. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 12–19. [Google Scholar] [CrossRef]
- Vetter, K.; Barnowski, R.; Cates, J.W.; Haefner, A.; Joshi, T.H.Y.; Pavlovsky, R.; Quiter, B.J. Advances in nuclear radiation sensing: Enabling 3-D gamma-ray vision. Sensors 2019, 19, 2541. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vetter, K.; Barnowksi, R.; Haefner, A.; Joshi, T.H.; Pavlovsky, R.; Quiter, B.J. Gamma-Ray imaging for nuclear security and safety: Towards 3-D gamma-ray vision. Nucl. Instruments Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2018, 878, 159–168. [Google Scholar] [CrossRef]
- Hellfeld, D.; Barton, P.; Gunter, D.; Haefner, A.; Mihailescu, L.; Vetter, K. Real-Time Free-Moving Active Coded Mask 3D Gamma-Ray Imaging. IEEE Trans. Nucl. Sci. 2019, 66, 2252–2260. [Google Scholar] [CrossRef]
- Hosmar, M.E.; Nokleby, S.B.; Waller, E. Experimental testing of an autonomous radiation mapping robot. In Proceedings of the 2017 CCToMM M3 Symposium, Montreal, QC, Canada, 25–26 May 2017. [Google Scholar]
- Royo, P.; Pastor, E.; Macias, M.; Cuadrado, R.; Barrado, C.; Vargas, A. An unmanned aircraft system to detect a radiological point source using RIMA software architecture. Remote Sens. 2018, 10, 1712. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Zhu, Y.; Wang, Z.; Li, C.; Peng, Z.R.; Ge, L. Use of multi-rotor unmanned aerial vehicles for radioactive source search. Remote Sens. 2018, 10, 728. [Google Scholar] [CrossRef] [Green Version]
- Cortez, R.A.; Papageorgiou, X.; Tanner, H.G.; Klimenko, A.V.; Borozdin, K.N.; Lumia, R.; Priedhorsky, W.C. Smart radiation sensor management. IEEE Robot. Autom. Mag. 2008, 15, 85–93. [Google Scholar] [CrossRef]
- Bird, B.; Griffiths, A.; Martin, H.; Codres, E.; Jones, J.; Stancu, A.; Lennox, B.; Watson, S.; Poteau, X. A Robot to Monitor Nuclear Facilities: Using Autonomous Radiation-Monitoring Assistance to Reduce Risk and Cost. IEEE Robot. Autom. Mag. 2018, 26, 35–43. [Google Scholar] [CrossRef]
- Sebastian, B.; Ben-Tzvi, P. Physics based path planning for autonomous tracked vehicle in challenging terrain. J. Intell. Robot. Syst. 2019, 95, 511–526. [Google Scholar] [CrossRef]
- Chakrabarty, A.; Langelaan, J.W. Energy-based long-range path planning for soaring-capable unmanned aerial vehicles. J. Guid. Control. Dyn. 2011, 34, 1002–1015. [Google Scholar] [CrossRef]
- Husky Unmanned Ground Vehicle. Available online: https://clearpathrobotics.com/husky-unmanned-ground-vehicle-robot/ (accessed on 2 October 2020).
- Hines, T.; Stepanas, K.; Talbot, F.; Sa, I.; Lewis, J.; Hernandez, E.; Kottege, N.; Hudson, N. Virtual Surfaces and Attitude Aware Planning and Behaviours for Negative Obstacle Navigation. IEEE Robot. Autom. Lett. 2021, 6, 4048–4055. [Google Scholar] [CrossRef]
- Bosse, M.; Zlot, R. Continuous 3D scan-matching with a spinning 2D laser. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4312–4319. [Google Scholar]
- Bosse, M.; Zlot, R.; Flick, P. Zebedee: Design of a Spring-Mounted 3-D Range Sensor with Application to Mobile Mapping. IEEE Trans. Robot. 2012, 28, 1104–1119. [Google Scholar] [CrossRef]
- CSIRO Data61 Robotics and Autonomous Systems. Occupancy Homogeneous Map. Available online: https://github.com/csiro-robotics/ohm (accessed on 24 May 2021).
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Nemec, D.; Gregor, M.; Bubeníková, E.; Hruboš, M.; Pirník, R. Improving the Hybrid A* method for a non-holonomic wheeled robot. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419826857. [Google Scholar] [CrossRef] [Green Version]
- Williams, J.; Jiang, S.; OBrien, M.; Wagner, G.; Hernandez, E.; Cox, M.; Pitt, A.; Arkin, R.; Hudson, N. Online 3D Frontier-Based UGV and UAV Exploration Using Direct Point Cloud Visibility. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration, Karlsruhe, Germany, 14–16 September 2020. [Google Scholar]
- Lu, D.V.; Hershberger, D.; Smart, W.D. Layered costmaps for context-sensitive navigation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar] [CrossRef]
- Knoll, G.F. Radiation Detection and Measurement, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- STS Safe Mini-Source Simulated Radiation Source. Available online: https://www.safetrainingsystems.com/safeminisource (accessed on 6 October 2020).
- STS Safe-RadEye G-10 Simulated Survey Meter. Available online: https://www.safetrainingsystems.com/safe-radeyeg10 (accessed on 7 October 2020).









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Groves, K.; Hernandez, E.; West, A.; Wright, T.; Lennox, B. Robotic Exploration of an Unknown Nuclear Environment Using Radiation Informed Autonomous Navigation. Robotics 2021, 10, 78. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics10020078
Groves K, Hernandez E, West A, Wright T, Lennox B. Robotic Exploration of an Unknown Nuclear Environment Using Radiation Informed Autonomous Navigation. Robotics. 2021; 10(2):78. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics10020078
Chicago/Turabian StyleGroves, Keir, Emili Hernandez, Andrew West, Thomas Wright, and Barry Lennox. 2021. "Robotic Exploration of an Unknown Nuclear Environment Using Radiation Informed Autonomous Navigation" Robotics 10, no. 2: 78. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics10020078