A Taxonomy for Mobile Robots: Types, Applications, Capabilities, Implementations, Requirements, and Challenges

 , , ,
, , ,
Abstract
:1. Introduction
2. Literature Review
2.1. Books
2.2. Surveys
2.3. Reference Systems
3. Analysis of Types
4. Analysis of Applications
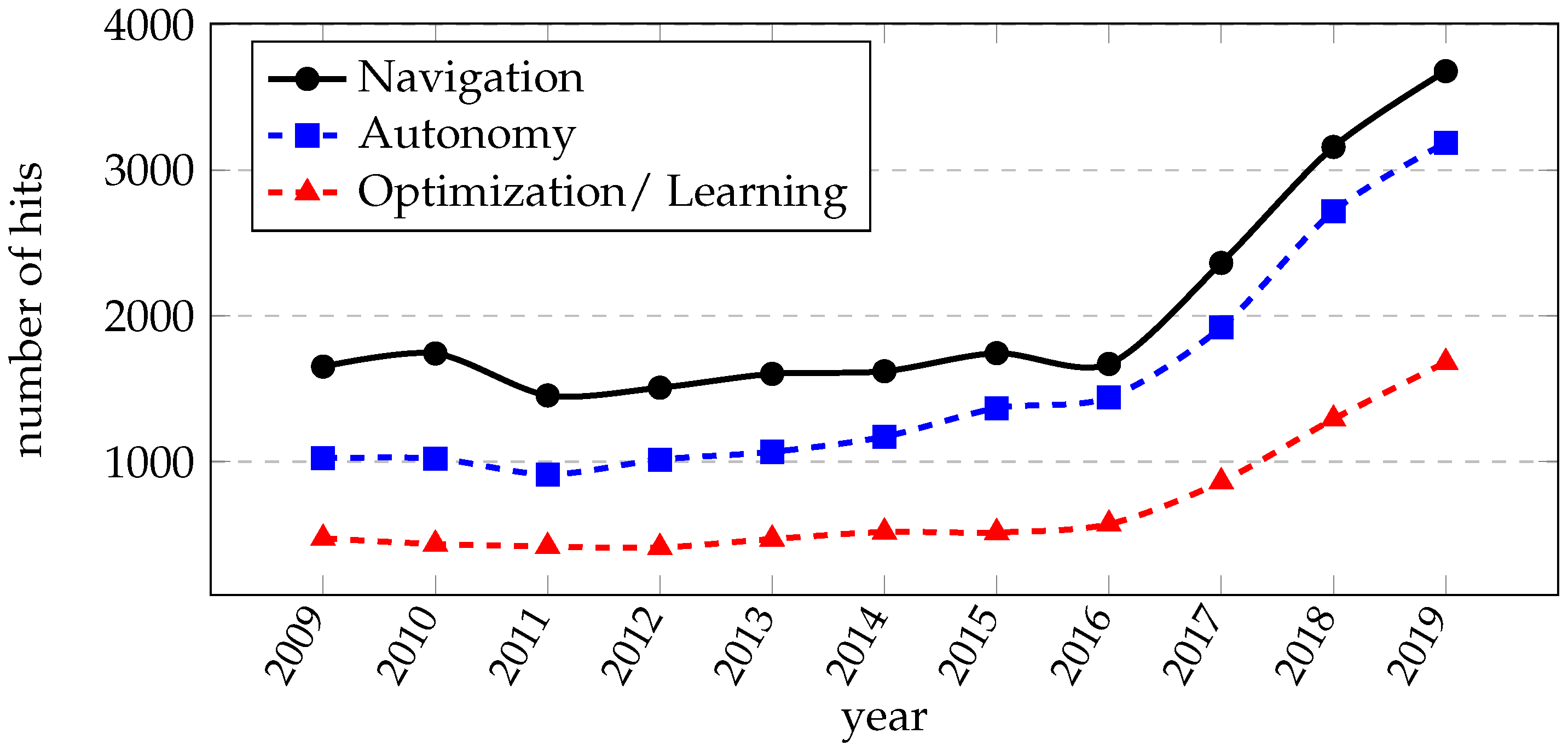
5. Analysis of Capabilities
5.1. Navigation
5.2. Autonomy
5.3. Optimization/Learning
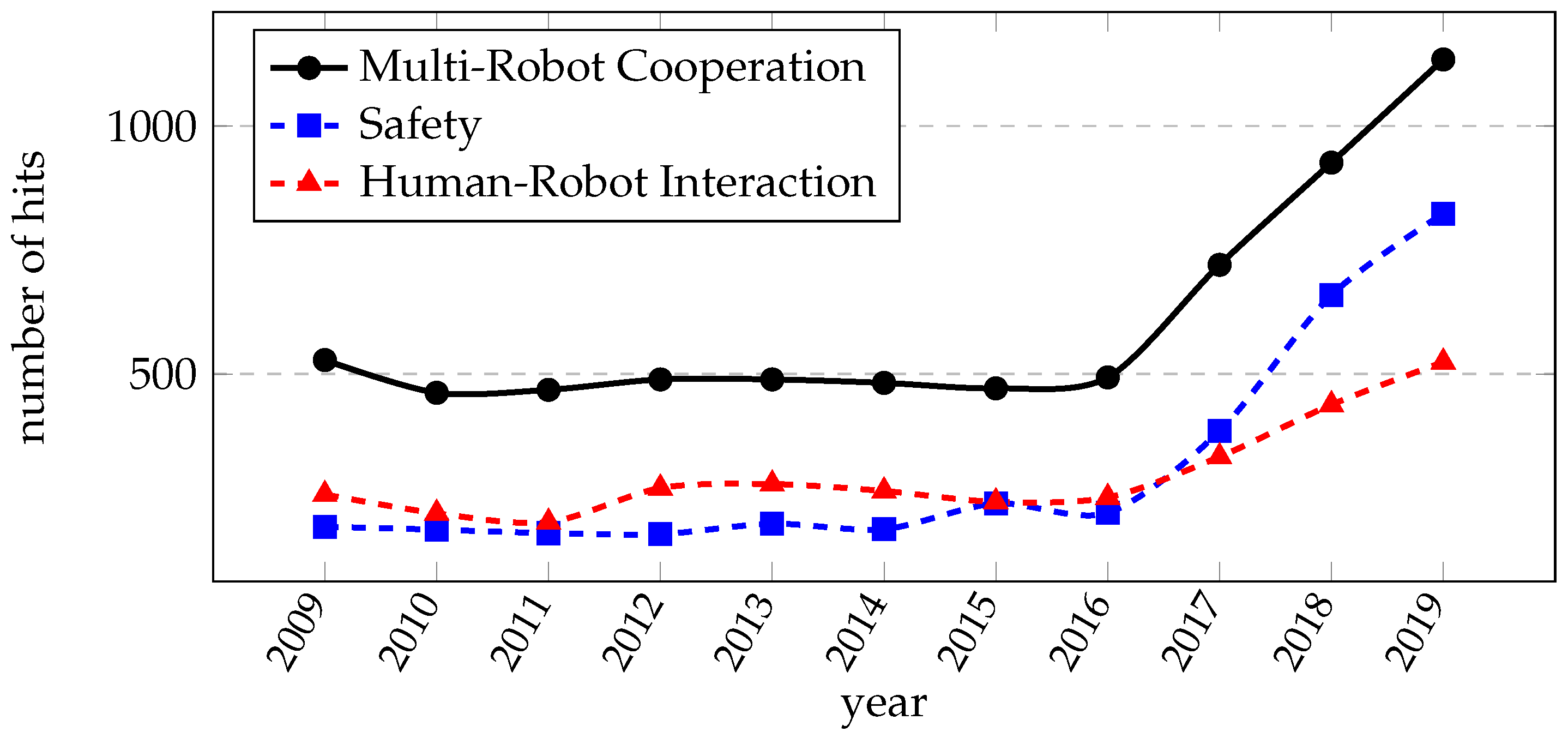
5.4. Multi-Robot Cooperation
5.5. Safety
5.6. Human-Robot Interaction
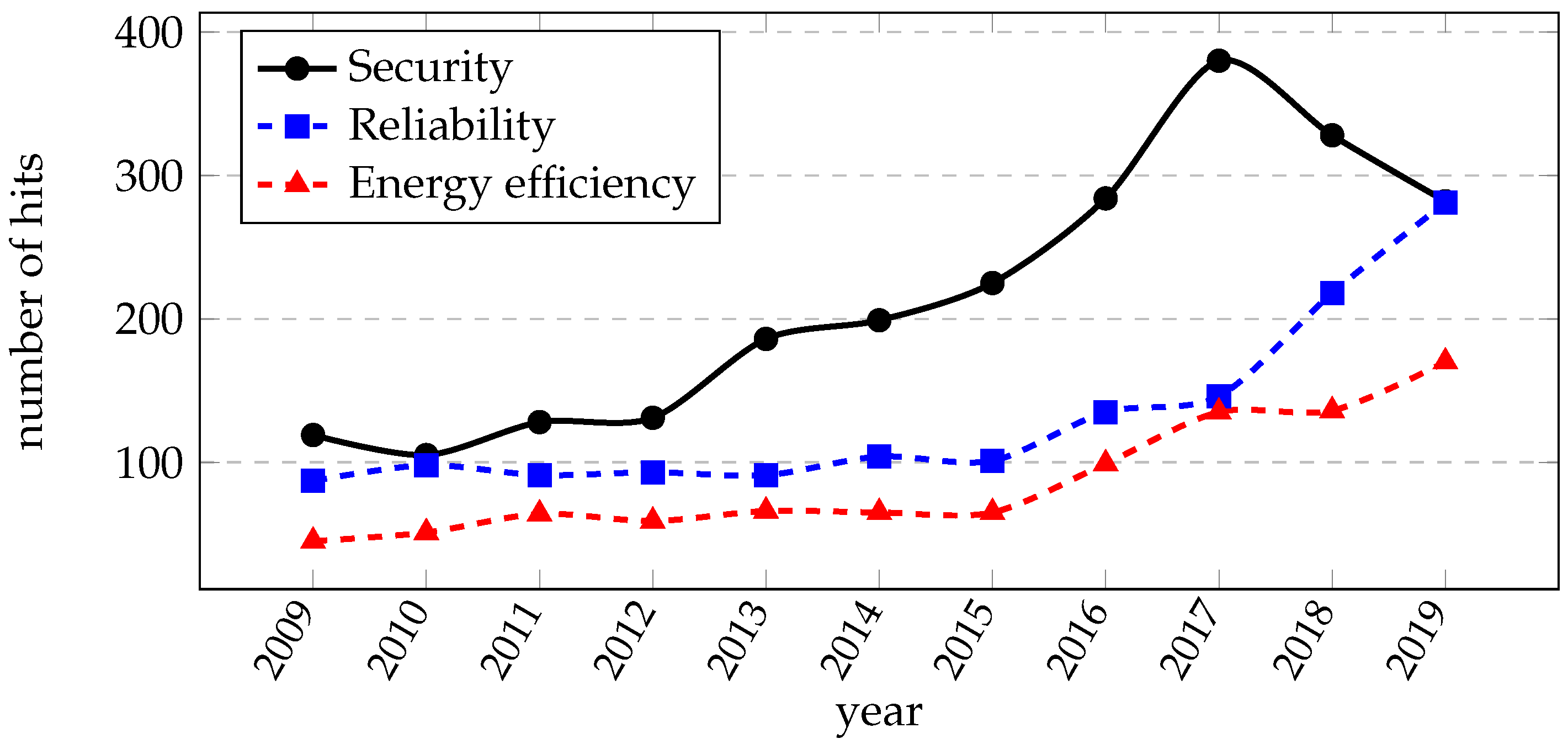
5.7. Security
5.8. Reliability
5.9. Energy Efficiency
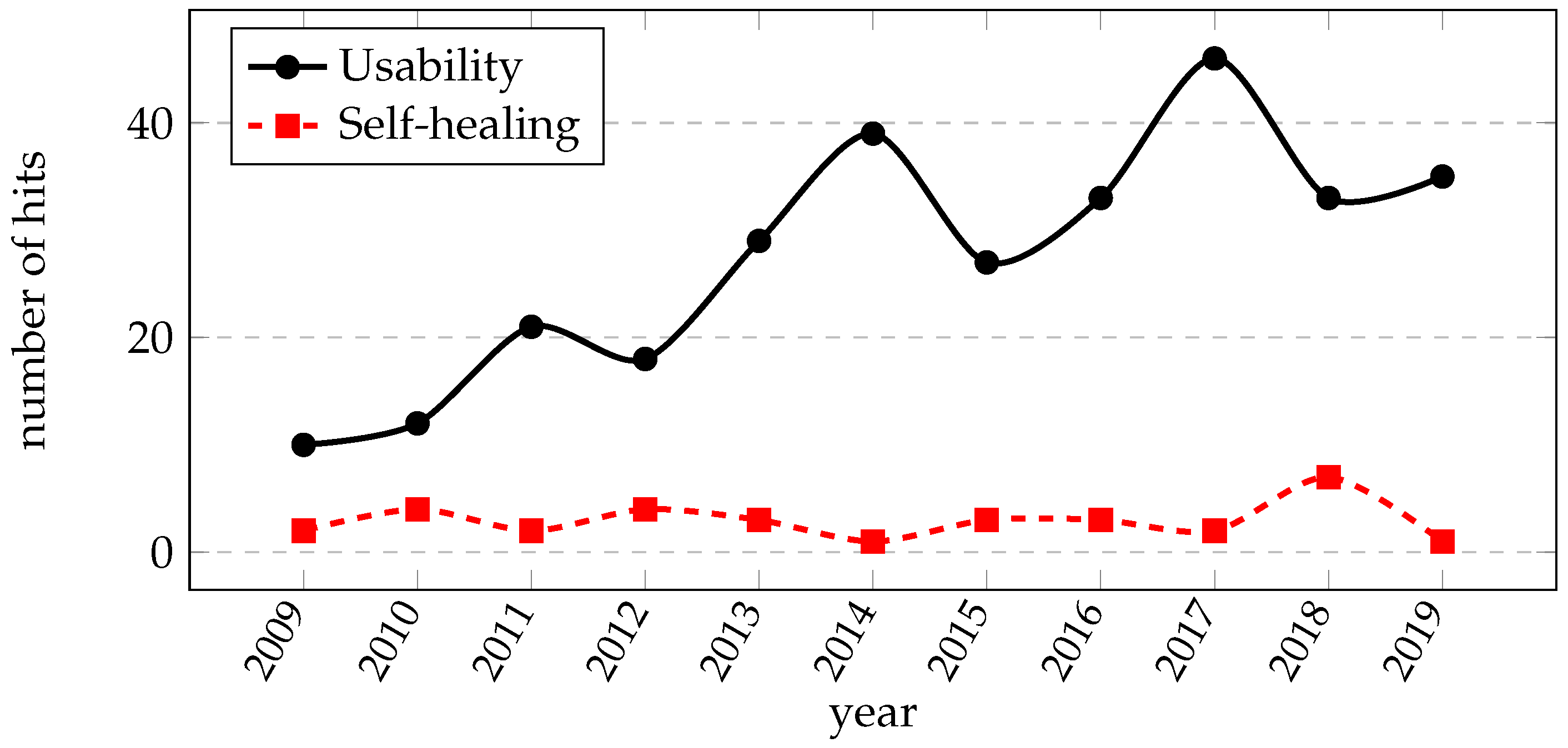
5.10. Usability
5.11. Self-Healing
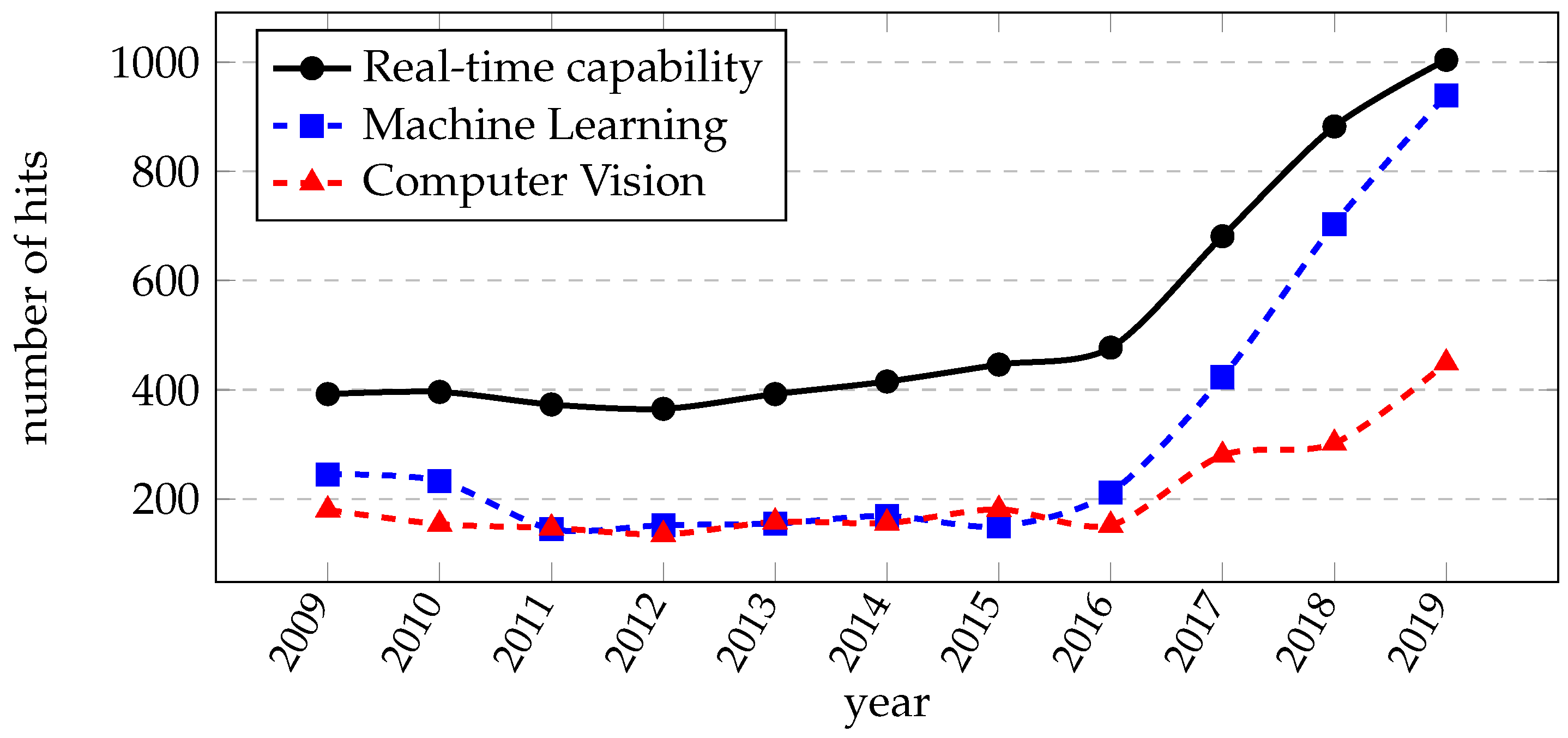
6. Analysis of Implementations
6.1. Real-Time Capability
6.2. Machine Learning
6.3. Computer Vision
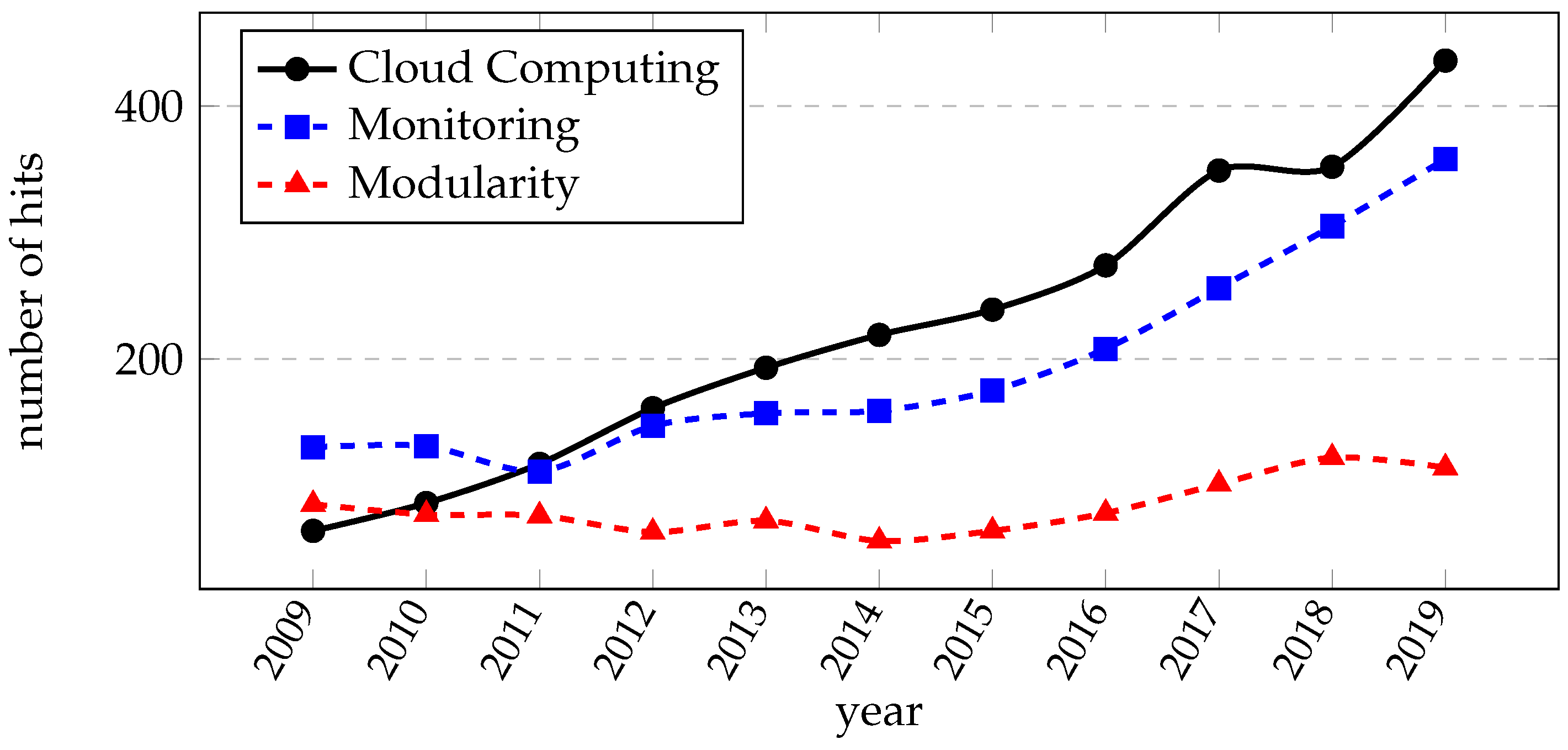
6.4. Cloud Computing
6.5. Monitoring
6.6. Modularity
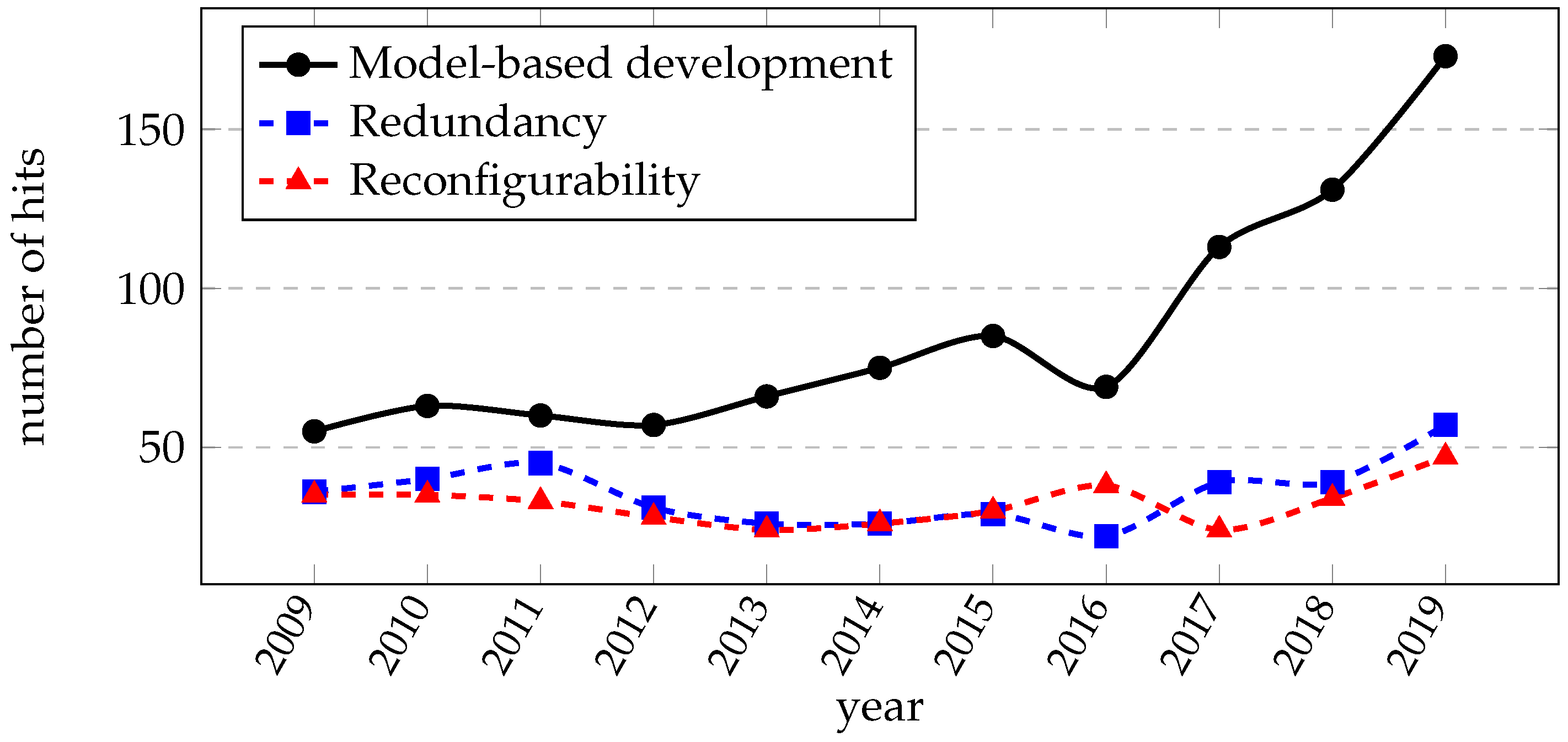
6.7. Model-Based Development
6.8. Redundancy
6.9. Reconfigurability
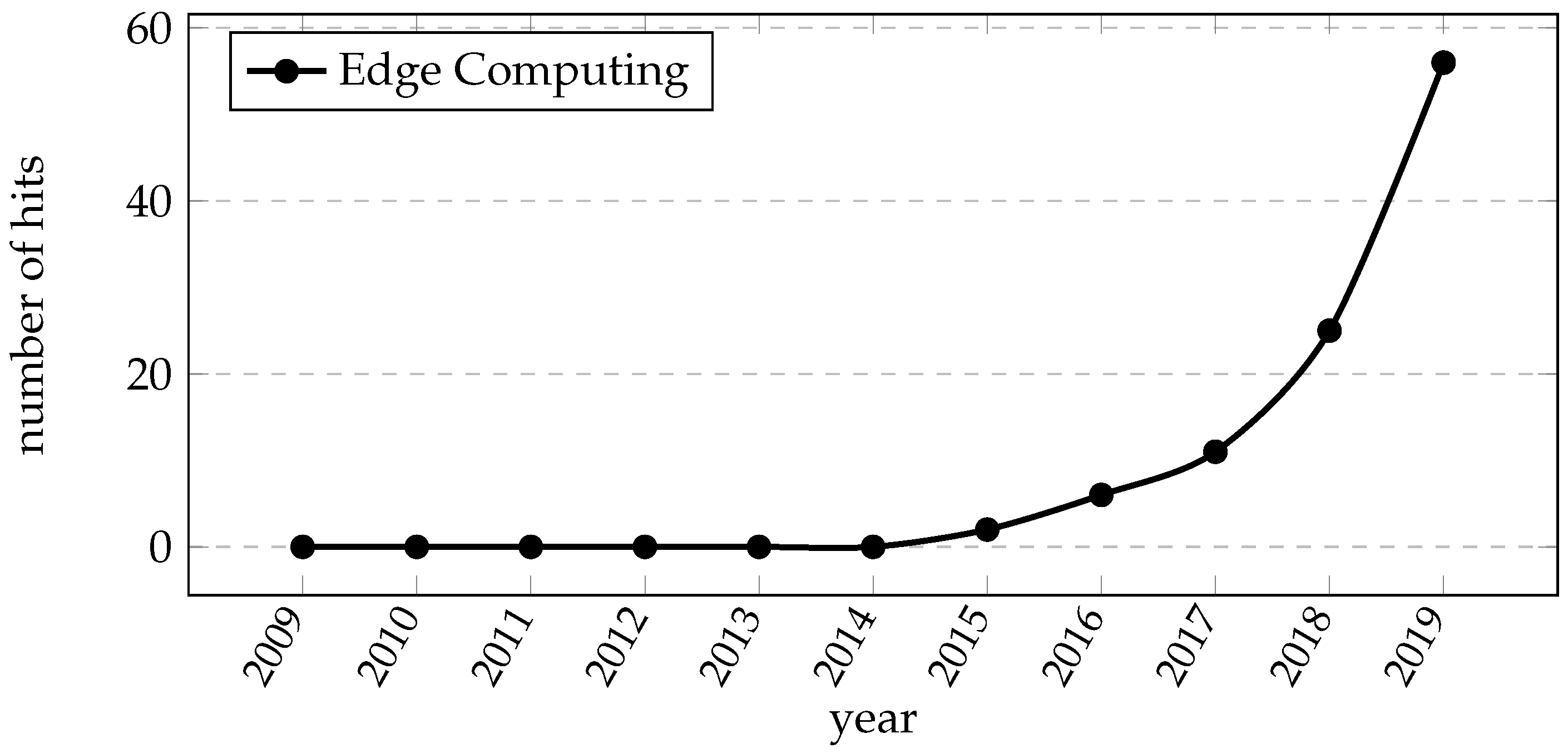
6.10. Edge Computing
7. Taxonomy
7.1. Types
- T1
- Wheeled Mobile Robots (WMR)
- T2
- Unmanned Arial Vehicle (UAV)
- T3
- Unmanned Underwater Vehicle (UUV)
- T4
- Biomimetic
- T5
- Micro/Nano
7.2. Applications
- A1
- Industrial/Agriculture
- A2
- Transportation/Logistics
- A3
- Self-driven cars/Autonomous vehicles
- A4
- Health care
- A5
- Disaster response
- A6
- Exploration
- A7
- Service
- A8
- Entertainment
- A9
- Human Augmentation
- A10
- Education/Teaching
- A11
- Military
- A12
- Telepresence
7.3. Capabilities
- C1
- Navigation
- C2
- Autonomy
- C3
- Optimization/Learning
- C4
- Multi-Robot Cooperation
- C5
- Safety
- C6
- Human-Robot Interaction
- C7
- Security
- C8
- Reliability
- C9
- Energy efficiency
7.4. Implementations
- I1
- Real-time capability
- I2
- Machine Learning
- I3
- Computer Vision
- I4
- Cloud Computing
- I5
- Monitoring
- I6
- Modularity
- I7
- Model-based development
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Topic | Search Matrix | Hits |
|---|---|---|
| Navigation | (“All Metadata”:mobile AND robot AND (navigation OR mapping OR slam OR “collision avoidance” OR “path planning”)) | 34,423 |
| Autonomy | (“All Metadata”:mobile AND robot AND (autonomy OR autonomous)) | 24,626 |
| Optimization/Learning | (“All Metadata”:mobile AND robot AND (learning OR optimizing)) | 11,051 |
| Multi-Robot Cooperation | (“All Metadata”:mobile AND robot AND (swarm OR “multi robot” OR “networked robots”)) | 9265 |
| Safety | (“All Metadata”:mobile AND robot AND safety) | 4617 |
| Human-Robot Interaction | (“All Metadata”:mobile AND robot AND (“human machine” OR “machine human” OR “human robot” OR “robot human”)) | 4477 |
| Security | (“All Metadata”:mobile AND robot AND security) | 2907 |
| Reliability | (“All Metadata”:mobile AND robot AND reliability) | 2037 |
| Energy efficiency | (“All Metadata”:mobile AND robot AND (energy AND (efficient OR efficiency))) | 1237 |
| Usability | (“All Metadata”:mobile AND robot AND usability) | 379 |
| Self-healing | (“All Metadata”:mobile AND robot AND (“self healing” OR “self repairing”)) | 45 |
| Real-time capability | (“All Metadata”:mobile AND robot AND (“real time” OR realtime)) | 8874 |
| Machine Learning | (“All Metadata”:mobile AND robot AND (“neural network” OR “neural networks” OR “machine learning” OR “deep learning”)) | 5768 |
| Computer Vision | (“All Metadata”:mobile AND robot AND (“computer vision” OR cv OR “object recognition”)) | 4207 |
| Cloud Computing | (“All Metadata”:mobile AND robot AND (cloud OR server)) | 2864 |
| Monitoring | (“All Metadata”:mobile AND robot AND (verification OR validation OR diagnosis OR “self awareness” OR “system monitoring” OR “fault detection”)) | 2851 |
| Modularity | (“All Metadata”:mobile AND robot AND modular) | 1438 |
| Model-based development | (“All Metadata”:mobile AND robot AND (“model based” OR “model driven”)) | 1346 |
| Redundancy | (“All Metadata”:mobile AND robot AND redundancy) | 739 |
| Reconfigurability | (“All Metadata”:mobile AND robot AND (reconfiguration OR reconfigure)) | 581 |
| Edge Computing | (“All Metadata”:mobile AND robot AND (“edge computing” OR “fog computing”)) | 130 |
References
- IEEE Xplore-Advanced Search. Available online: https://0-ieeexplore-ieee-org.brum.beds.ac.uk/search/advanced (accessed on 26 August 2020).
- Randolph, J.J. A guide to writing the dissertation literature review. Pract. Assess. Res. Eval. 2009, 14, 13. [Google Scholar]
- Brocke, J.V.; Simons, A.; Niehaves, B.; Niehaves, B.; Riemer, K.; Plattfaut, R.; Cleven, A. Reconstructing the giant: On the importance of rigour in documenting the literature search process. In Proceedings of the 17th European Conference on Information Systems, Verona, Italy, 8–10 June 2009. [Google Scholar]
- Google Scholar-Advanced Search. Available online: https://0-scholar-google-com.brum.beds.ac.uk/?hl=en&as_sdt=0,5#d=gs_asd (accessed on 26 August 2020).
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Pearson Education Limited: Essex, UK, 2016. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; The MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics, 2nd ed.; Springer Publishing Company, Incorporated: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots, 2nd ed.; The MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Corke, P. Robotics, Vision and Control: Fundamental Algorithms in MATLAB, 2nd ed.; Springer Publishing Company, Inc.: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Bräunl, T. Embedded Robotics, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Yim, M.; Shen, W.M.; Salemi, B.; Rus, D.; Moll, M.; Lipson, H.; Klavins, E.; Chirikjian, G.S. Modular self-reconfigurable robot systems [Grand challenges of robotics]. IEEE Robot. Autom. Mag. 2007, 14, 43–52. [Google Scholar] [CrossRef]
- Yang, G.Z.; Bellingham, J.; Dupont, P.E.; Fischer, P.; Floridi, L.; Full, R.; Jacobstein, N.; Kumar, V.; McNutt, M.; Merrifield, R.; et al. The grand challenges of science robotics. Sci. Robot. 2018, 3. [Google Scholar] [CrossRef] [PubMed]
- Robin, C.; Lacroix, S. Multi-robot target detection and tracking: Taxonomy and survey. Auton. Robot. 2016, 40, 729–760. [Google Scholar] [CrossRef] [Green Version]
- Huntsberger, T.; Rodriguez, G.; Schenker, P.S. Robotics challenges for robotic and human Mars exploration. In Proceedings of the 4th International Conference and Exposition on Robotics for Challenging Situations and Environments, Albuquerque, NM, USA, 27 February–2 March 2000; pp. 340–346. [Google Scholar]
- Adamides, G.; Christou, G.; Katsanos, C.; Xenos, M.; Hadzilacos, T. Usability guidelines for the design of robot teleoperation: A taxonomy. IEEE Trans. Hum. Mach. Syst. 2015, 45, 256–262. [Google Scholar] [CrossRef]
- Rubio, F.; Valero, F.; Llopis-Albert, C. A review of mobile robots: Concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 2019, 16, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Chukwuemeka, C.; Habib, M. Development of autonomous networked robots (ANR) for surveillance: Conceptual design and requirements. In Proceedings of the 44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 3757–3763. [Google Scholar] [CrossRef]
- Alatise, M.B.; Hancke, G.P. A Review on Challenges of Autonomous Mobile Robot and Sensor Fusion Methods. IEEE Access 2020, 8, 39830–39846. [Google Scholar] [CrossRef]
- Dynamics, B. Spot Boston Dynamics. Available online: https://www.bostondynamics.com/spot (accessed on 10 March 2020).
- Soares, J.M.; Navarro, I.; Martinoli, A. The Khepera IV Mobile Robot: Performance Evaluation, Sensory Data and Software Toolbox. In Robot 2015: Second Iberian Robotics Conference; Reis, L.P., Moreira, A.P., Lima, P.U., Montano, L., Muñoz-Martinez, V., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 767–781. [Google Scholar]
- Open Source Robotics Foundation, Inc. Turtlebot. Available online: https://www.turtlebot.com/ (accessed on 13 March 2020).
- Schöpping, T.; Korthals, T.; Hesse, M.; Rückert, U. AMiRo: A Mini Robot as Versatile Teaching Platform. Adv. Intell. Syst. Comput. 2019, 829, 177–188. [Google Scholar] [CrossRef]
- Betthauser, J.; Benavides, D.; Schornick, J.; O’Hara, N.; Patel, J.; Cole, J.; Lobaton, E. WolfBot: A distributed mobile sensing platform for research and education. In Proceedings of the 2014 Zone 1 Conference of the American Society for Engineering Education, Bridgeport, CT, USA, 3–5 April 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Mondada, F.; Bonani, M.; Raemy, X.; Pugh, J.; Cianci, C.; Klaptocz, A.; Magnenat, S.; Zufferey, J.C.; Floreano, D.; Martinoli, A. The e-puck, a robot designed for education in engineering. In Proceedings of the 9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, 7 May 2009; Volume 1, pp. 59–65. [Google Scholar]
- Röhrig, C.; Heß, D. Mobile Manipulation for Human-Robot Collaboration in Intralogistics. In IAENG Transactions on Engineering Sciences-Special Issue for the International Association of Engineers Conferences; World Scientific: Singapore, 2020; pp. 1–20. [Google Scholar] [CrossRef]
- Gartseev, I.B.; Lee, L.f.; Krovi, V.N. A Low-Cost Real-Time Mobile Robot Platform ( ArEduBot ) to support Project-Based Learning in Robotics & Mechatronics. In Proceedings of the 2nd International Conference on Robotics in Education (RiE 2011), Vienna, Austria, 15–16 September 2011; pp. 117–124. [Google Scholar]
- Wu, J.; Lv, C.; Zhao, L.; Li, R.; Wang, G. Design and implementation of an omnidirectional mobile robot platform with unified I/O interfaces. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation, ICMA 2017, Takamatsu, Japan, 6–9 August 2017; pp. 410–415. [Google Scholar] [CrossRef]
- Meghana, S.; Nikhil, T.V.; Murali, R.; Sanjana, S.; Vidhya, R.; Mohammed, K.J. Design and implementation of surveillance robot for outdoor security. In Proceedings of the RTEICT 2017-2nd IEEE International Conference on Recent Trends in Electronics, Information and Communication Technology, Bangalore, India, 19–20 May 2017; pp. 1679–1682. [Google Scholar] [CrossRef]
- Yaseen Ismael, O.; Hedley, J. Analysis, Design, and Implementation of an Omnidirectional Mobile Robot Platform. Am. Sci. Res. J. Eng. 2016, 22, 195–209. [Google Scholar]
- MATLAB. Available online: https://www.mathworks.com/products/matlab.html (accessed on 6 October 2020).
- Simulation and Model-Based Design. Available online: https://www.mathworks.com/products/simulink.html (accessed on 6 October 2020).
- Spectrum, I. Boston Dynamics’ Spot Robot Dog Goes on Sale. Available online: https://spectrum.ieee.org/automaton/robotics/industrial-robots/boston-dynamics-spot-robot-dog-goes-on-sale (accessed on 12 March 2020).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Wienke, J.; Wrede, S. A middleware for collaborative research in experimental robotics. In Proceedings of the 2011 IEEE/SICE International Symposium on System Integration, Kyoto, Japan, 20–22 December 2011; pp. 1183–1190. [Google Scholar] [CrossRef] [Green Version]
- BeagleBoard Bone. Available online: https://beagleboard.org/bone (accessed on 13 October 2020).
- GCtronic. E-Puck2. Available online: https://www.gctronic.com/doc/index.php/e-puck2 (accessed on 20 October 2020).
- Create 2 Robot. Available online: https://edu.irobot.com/what-we-offer/create-robot (accessed on 13 October 2020).
- Arduino. Arduino Home. Available online: https://www.arduino.cc/ (accessed on 19 March 2020).
- Gerke, M.; Borgolte, U.; Masár, I.; Jelenciak, F.; Bahnik, P.; Al-Rashedi, N. Lighter-than-air UAVs for surveillance and environmental monitoring. In Future Security Research Conference; Springer: Berlin/Heidelberg, Germany, 2012; pp. 480–483. [Google Scholar]
- Tom Plümmer. Impfstoffe und Medikamente für abgelegene Orte; Bundesministerium für Wirtschaft und Energie Broschüre: Berlin, Germany, 2019. [Google Scholar]
- Goetz, J.; Kiesler, S.; Powers, A. Matching robot appearance and behavior to tasks to improve human-robot cooperation. In Proceedings of the 12th IEEE International Workshop on Robot and Human Interactive Communication, Millbrae, CA, USA, 31 October–2 November 2003; pp. 55–60. [Google Scholar]
- Li, J.; de Ávila, B.E.F.; Gao, W.; Zhang, L.; Wang, J. Micro/nanorobots for biomedicine: Delivery, surgery, sensing, and detoxification. Sci. Robot. 2017, 2. [Google Scholar] [CrossRef]
- IEEE. Types of Robots: ROBOTS: Your Guide to the World of Robotics. Available online: https://0-robots-ieee-org.brum.beds.ac.uk/learn/types-of-robots/ (accessed on 10 March 2020).
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef] [Green Version]
- Bajracharya, M.; Maimone, M.W.; Helmick, D. Autonomy for Mars Rovers: Past, Present, and Future. Computer 2008, 41, 44–50. [Google Scholar] [CrossRef] [Green Version]
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Available online: https://www.sae.org/standards/content/j3016_201806 (accessed on 11 August 2020).
- Beer, J.M.; Fisk, A.D.; Rogers, W.A. Toward a Framework for Levels of Robot Autonomy in Human-Robot Interaction. J. Hum. Robot Interact. 2014, 3, 74–99. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Levinson, J.; Askeland, J.; Becker, J.; Dolson, J.; Held, D.; Kammel, S.; Kolter, J.Z.; Langer, D.; Pink, O.; Pratt, V.; et al. Towards fully autonomous driving: Systems and algorithms. IEEE Intell. Veh. Symp. Proc. 2011, 163–168. [Google Scholar] [CrossRef]
- Dorigo, M.; Floreano, D.; Gambardella, L.M.; Mondada, F.; Nolfi, S.; Baaboura, T.; Birattari, M.; Bonani, M.; Brambilla, M.; Brutschy, A.; et al. Swarmanoid: A novel concept for the study of heterogeneous robotic swarms. IEEE Robot. Autom. Mag. 2013, 20, 60–71. [Google Scholar] [CrossRef] [Green Version]
- Guiochet, J.; Machin, M.; Waeselynck, H. Safety-critical advanced robots: A survey. Robot. Auton. Syst. 2017, 94, 43–52. [Google Scholar] [CrossRef] [Green Version]
- Broggi, A.; Buzzoni, M.; Debattisti, S.; Grisleri, P.; Laghi, M.C.; Medici, P.; Versari, P. Extensive tests of autonomous driving technologies. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1403–1415. [Google Scholar] [CrossRef]
- Vasic, M.; Billard, A. Safety issues in human-robot interactions. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 197–204. [Google Scholar]
- Chen, J.Y.; Haas, E.C.; Barnes, M.J. Human performance issues and user interface design for teleoperated robots. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1231–1245. [Google Scholar] [CrossRef]
- Riek, L.D.; Member, S. Movement Coordination in Human—Robot Teams. IEEE Trans. Robot. 2016, 32, 909–919. [Google Scholar] [CrossRef] [Green Version]
- Hochgeschwender, N.; Cornelius, G.; Voos, H. Arguing Security of Autonomous Robots. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Macau, China, 3–8 November 2019; pp. 7791–7797. [Google Scholar] [CrossRef]
- Carlson, J.; Murphy, R.R. Reliability analysis of mobile robots. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 274–281. [Google Scholar] [CrossRef]
- Künemund, F.; Hess, D.; Röhrig, C. Energy efficient kinodynamic motion planning for holonomic AGVs in industrial applications using state lattices. In Proceedings of the 47th International Symposium on Robotics ISR 2016, Munich, Germany, 21–22 June 2016; Volume 2016, pp. 459–466. [Google Scholar]
- Pripfl, J.; Körtner, T.; Batko-Klein, D.; Hebesberger, D.; Weninger, M.; Gisinger, C.; Frennert, S.; Eftring, H.; Antona, M.; Adami, I.; et al. Results of a real world trial with a mobile social service robot for older adults. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Christchurch, New Zealand, 7–10 March 2016; pp. 497–498. [Google Scholar] [CrossRef]
- Terryn, S.; Brancart, J.; Lefeber, D.; Van Assche, G.; Vanderborght, B. Self-healing soft pneumatic robots. Sci. Robot. 2017, 2, 1–13. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; Volume 2, pp. 500–505. [Google Scholar] [CrossRef]
- Zou, A.M.; Hou, Z.G.; Fu, S.Y.; Tan, M. Neural networks for mobile robot navigation: A survey. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2006; Volume 3972 LNCS, pp. 1218–1226. [Google Scholar] [CrossRef]
- Dubé, R.; Cramariuc, A.; Dugas, D.; Nieto, J.; Siegwart, R.; Cadena, C. SegMap: 3D Segment Mapping using Data-Driven Descriptors. arXiv 2018, arXiv:1804.09557. [Google Scholar]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer vision with the OpenCV library; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2008. [Google Scholar]
- Arnold, E.; Al-Jarrah, O.Y.; Dianati, M.; Fallah, S.; Oxtoby, D.; Mouzakitis, A. A Survey on 3D Object Detection Methods for Autonomous Driving Applications. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3782–3795. [Google Scholar] [CrossRef] [Green Version]
- Guizzo, E. Robots with their heads in the clouds. IEEE Spectr. 2011, 48, 17–18. [Google Scholar] [CrossRef]
- Wan, J.; Tang, S.; Yan, H.; Li, D.; Wang, S.; Vasilakos, A.V. Cloud robotics: Current status and open issues. IEEE Access 2016, 4, 2797–2807. [Google Scholar] [CrossRef]
- Roennau, A.; Heppner, G.; Kerscher, T.; Dillmann, R. Fault diagnosis and system status monitoring for a six-legged walking robot. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM, Budapest, Hungary, 4–6 July 2011; pp. 874–879. [Google Scholar] [CrossRef]
- Golombek, R.; Wrede, S.; Hanheide, M.; Heckmann, M. Learning a probabilistic self-awareness model for robotic systems. In Proceedings of the IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems, IROS 2010, Taipei, Taiwan, 18–22 October 2010; pp. 2745–2750. [Google Scholar] [CrossRef]
- Mellah, S.; Graton, G.; El Mostafa, E.; Ouladsine, M.; Planchais, A. Mobile robot additive fault diagnosis and accommodation. In Proceedings of the 2019 8th International Conference on Systems and Control (ICSC), Marrakesh, Morocco, 23–25 October 2019; pp. 241–246. [Google Scholar]
- Herbrechtsmeier, S.; Korthals, T.; Schopping, T.; Rückert, U. AMiRo: A modular customizable open-source mini robot platform. In Proceedings of the 2016 20th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 13–15 October 2016; pp. 687–692. [Google Scholar]
- Kagermann, H.; Wahlster, W.; Helbig, J. Umsetzungsempfehlungen für das Zukunftsprojekt Industrie 4.0; Technical report; acatech Deutsche Akademie der Technikwissenschaften e.V.: München, Germany, 2013. [Google Scholar]
- Lauschner, U.; Igel, B.; Krawczyk, L.; Wolff, C. Applying model-based principles on a distributed robotic system application. In Proceedings of the 2015 IEEE 8th International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, IDAACS 2015, Warsaw, Poland, 24–26 September 2015; Volume 2, pp. 893–897. [Google Scholar] [CrossRef]
- Mendoza, J.P.; Simmons, R. Mobile Robot Fault Detection based on Redundant Information Statistics. In Proceedings of the 2012 International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012. [Google Scholar]
- Meng, Y.; Zhang, Y.; Jin, Y. Autonomous self-reconfiguration of modular robots by evolving a hierarchical mechanochemical model. IEEE Comput. Intell. Mag. 2011, 6, 43–54. [Google Scholar] [CrossRef]
- Tang, F.; Parker, L.E. ASyMTRe: Automated synthesis of multi-robot task solutions through software reconfiguration. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 1501–1508. [Google Scholar] [CrossRef] [Green Version]
- Sarker, V.K.; Pena Queralta, J.; Gia, T.N.; Tenhunen, H.; Westerlund, T. Offloading SLAM for Indoor Mobile Robots with Edge-Fog-Cloud Computing. In Proceedings of the 2019 1st International Conference on Advances in Science, Engineering and Robotics Technology (ICASERT), Dhaka, Bangladesh, 3–5 May 2019; Volume 2019. [Google Scholar] [CrossRef]









| Reference | Number of Citations/Search Hits | |||
|---|---|---|---|---|
| Type | Title [source] | Year | Google Scholar | IEEE Xplore |
| Books see Section 2.1 | Artificial Intelligence [5] | 2009 | 35,011 | N/A |
| Probabilistic Robotics [6] | 2005 | 10,226 | N/A | |
| Springer Handbook of Robotics [7] | 2016 | 3974 | N/A | |
| Intro. to Auton. Mobile Robots [8] | 2011 | 3665 | N/A | |
| Robotics, Vision and Control [9] | 2016 | 1545 | N/A | |
| Embedded Robotics [10] | 2008 | 568 | N/A | |
| Surveys see Section 2.2 | Modular Reconfigurable Robots [11] | 2007 | 813 | N/A |
| Challenges of Science Robotics [12] | 2018 | 303 | N/A | |
| Multi-Robot Taxonomy [13] | 2016 | 126 | N/A | |
| Challenges for Mars Expl. [14] | 2000 | 86 | N/A | |
| Robot Teleop, Taxonomy [15] | 2015 | 33 | N/A | |
| Review of Mobile Robots [16] | 2019 | 20 | N/A | |
| ANR Requirements [17] | 2018 | 3 | N/A | |
| Challenges of Mobile Robots [18] | 2020 | 1 | N/A | |
| Reference systems see Section 2.3 | Spot [19] | 2019 | 945 | 70 |
| Khepera IV [20] | 2015 | 187 | 46 | |
| TurtleBot3 [21] | 2017 | 180 | 35 | |
| AMiRo [22] | 2018 | 105 | 15 | |
| WolfBot [23] | 2014 | 80 | 10 | |
| e-puck2 [24] | 2018 | 75 | 8 | |
| OmniMan [25] | 2020 | 32 | 1 | |
| ArEduBot [26] | 2011 | 24 | 1 | |
| Savvy [27] | 2017 | 6 | 2 | |
| Arduino Robot [28] | 2018 | 5 | 1 | |
| Omnidirectional Mobile Robot [29] | 2016 | 4 | 0 | |
| Reference | Application | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Source | Industrial/Agriculture | Transportation/Logistics | Self-Driven Cars/Autonomous Vehicles | Health Care | Disaster Response | Exploration | Service | Entertainment | Human Augmentation | Education/Teaching | Military | Telepresenc |
| IEEE [43] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| AI [5] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Review [18] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| Reference | Capability | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Type | Title [source] | Navigation | Autonomy | Optimization/Learning | Multi-Robot Cooperation | Safety | Human-Robot Interaction | Security | Reliability | Energy Efficiency | Usability | Self-Healing |
| Books see Section 2.1 | Artificial Intelligence [5] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| Probabilistic Robotics [6] | ✓ | ✓ | ✓ | |||||||||
| Springer Handbook of Robotics [7] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Intro. to Auton. Mobile Robots [8] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| Robotics, Vision and Control [9] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| Embedded Robotics [10] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| Surveys see Section 2.2 | Modular Reconfigurable Robots [11] | ✓ | ✓ | ✓ | ✓ | |||||||
| Challenges of Science Robotics [12] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Multi-Robot Taxonomy [13] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||
| Challenges for Mars Expl. [14] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| Robot Teleop, Taxonomy [15] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||
| Review of Mobile Robots [16] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||
| ANR Requirements [17] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||
| Challenges of Mobile Robots [18] | ✓ | ✓ | ✓ | ✓ | ||||||||
| Reference systems see Section 2.3 | Spot [19] | ✓ |  | | | ✓ | ✓ | ✓ | ||||
| Khepera IV [20] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| TurtleBot3 [21] | ✓ | ✓ | ✓ | ✓ | ||||||||
| AMiRo [22] | ✓ | ✓ | ✓ | ✓ | ||||||||
| WolfBot [23] | ✓ | ✓ | ✓ | ✓ | ||||||||
| e-puck2 [24] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| OmniMan [25] | ✓ | ✓ | ✓ | ✓ | ||||||||
| ArEduBot [26] | ✓ | ✓ | ✓ | |||||||||
| Savvy [27] | ✓ | ✓ | ✓ | ✓ | ||||||||
| Arduino Robot [28] | ✓ | ✓ | ✓ | |||||||||
| Omnidirectional Mobile Robot [29] | ✓ | ✓ | | ✓ | ✓ | |||||||
: As future capability addressed/described.| Reference | Implementation | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Type | Title [source] | Real-Time capability | Machine Learning | Computer Vision | Cloud Computing | Monitoring | Modularity | Model-Based Development | Redundancy | Reconfigurability | Edge Computing |
| Books see Section 2.1 | Artificial Intelligence [5] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Probabilistic Robotics [6] | ✓ | ✓ | ✓ | ||||||||
| Springer Handbook of Robotics [7] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Intro. to Auton. Mobile Robots [8] | ✓ | ✓ | ✓ | ||||||||
| Robotics, Vision and Control [9] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| Embedded Robotics [10] | ✓ | ✓ | ✓ | ✓ | |||||||
| Surveys see Section 2.2 | Modular Reconfigurable Robots [11] | ✓ | ✓ | ||||||||
| Challenges of Science Robotics [12] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Multi-Robot Taxonomy [13] | ✓ | ✓ | ✓ | ✓ | |||||||
| Challenges for Mars Expl. [14] | |||||||||||
| Robot Teleop, Taxonomy [15] | ✓ | ✓ | |||||||||
| Review of Mobile Robots [16] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||
| ANR Requirements [17] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| Challenges of Mobile Robots [18] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| Reference systems see Section 2.3 | Spot [19] | ✓ | ✓ | ✓ | |||||||
| Khepera IV [20] | ✓ | ✓ | |||||||||
| TurtleBot3 [21] | ✓ | ✓ | |||||||||
| AMiRo [22] | ✓ | ✓ | ✓ | ✓ | |||||||
| WolfBot [23] | ✓ | ✓ | |||||||||
| e-puck2 [24] | ✓ | ✓ | ✓ | ✓ | |||||||
| OmniMan [25] | ✓ | ||||||||||
| ArEduBot [26] | ✓ | ✓ | |||||||||
| Savvy [27] | ✓ | ✓ | ✓ | ||||||||
| Arduino Robot [28] | ✓ | ✓ | |||||||||
| Omnidirectional Mobile Robot [29] | |||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jahn, U.; Heß, D.; Stampa, M.; Sutorma, A.; Röhrig, C.; Schulz, P.; Wolff, C. A Taxonomy for Mobile Robots: Types, Applications, Capabilities, Implementations, Requirements, and Challenges. Robotics 2020, 9, 109. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040109
Jahn U, Heß D, Stampa M, Sutorma A, Röhrig C, Schulz P, Wolff C. A Taxonomy for Mobile Robots: Types, Applications, Capabilities, Implementations, Requirements, and Challenges. Robotics. 2020; 9(4):109. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040109
Chicago/Turabian StyleJahn, Uwe, Daniel Heß, Merlin Stampa, Andreas Sutorma, Christof Röhrig, Peter Schulz, and Carsten Wolff. 2020. "A Taxonomy for Mobile Robots: Types, Applications, Capabilities, Implementations, Requirements, and Challenges" Robotics 9, no. 4: 109. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040109