Mapping Three Electromyography Signals Generated by Human Elbow and Shoulder Movements to Two Degree of Freedom Upper-Limb Robot Control


 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
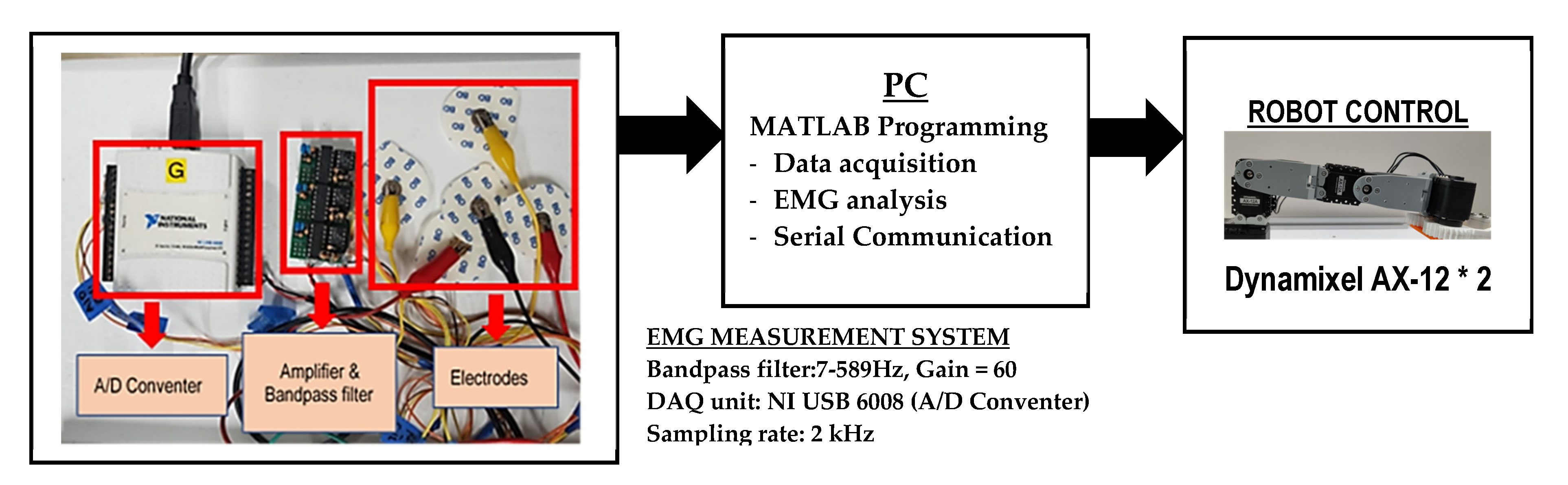
2.1. Proposed System Overview
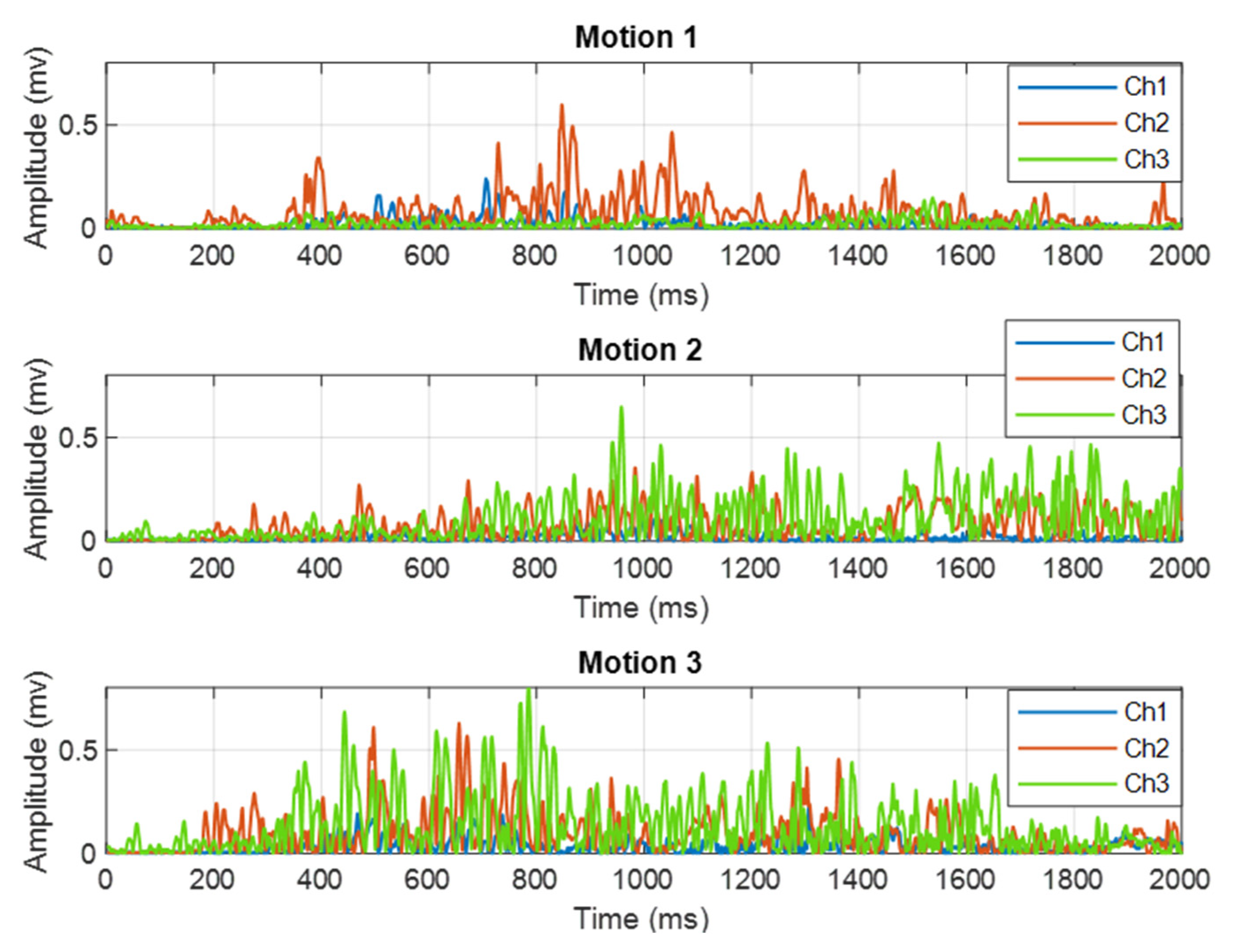
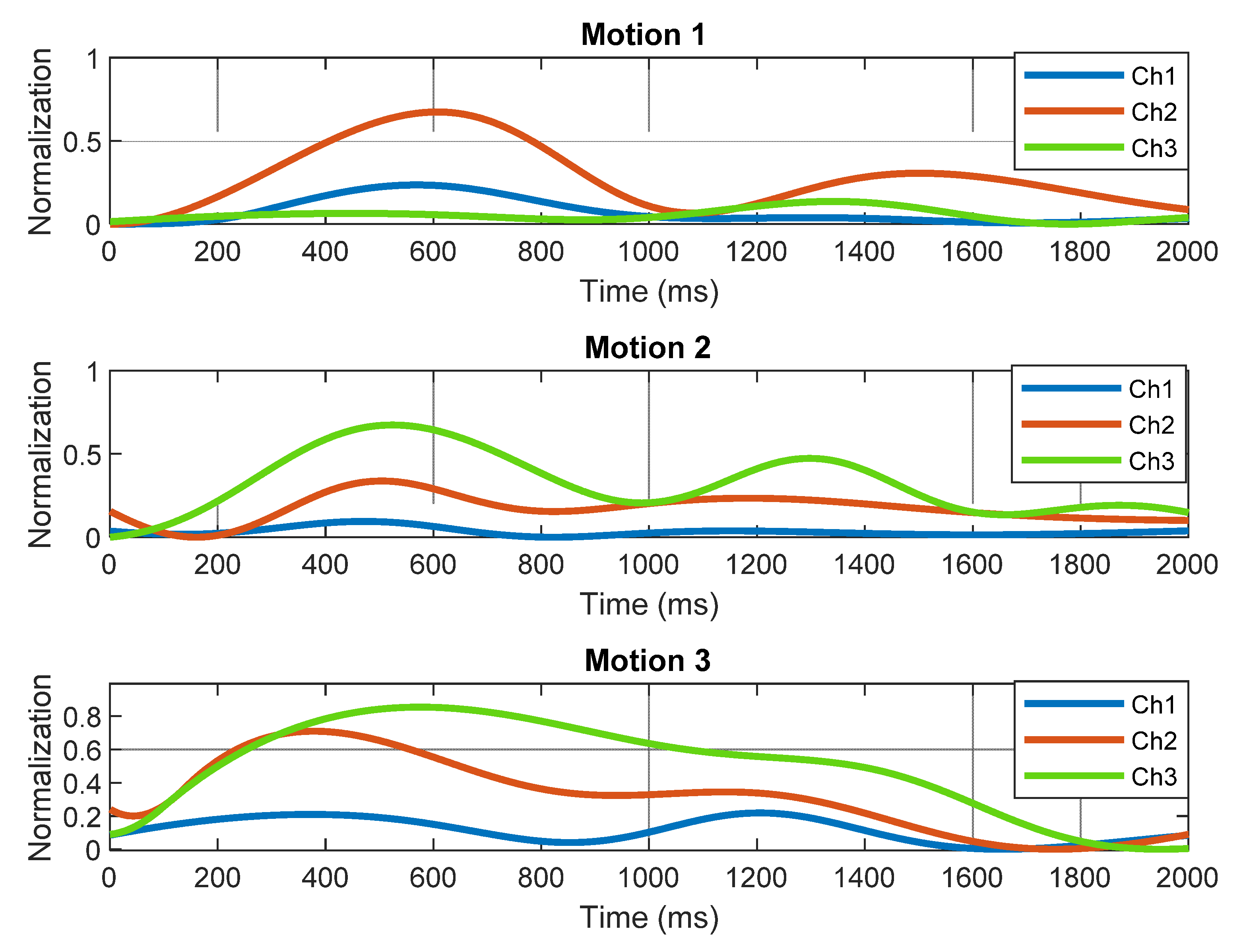
2.1.1. EMG Analysis
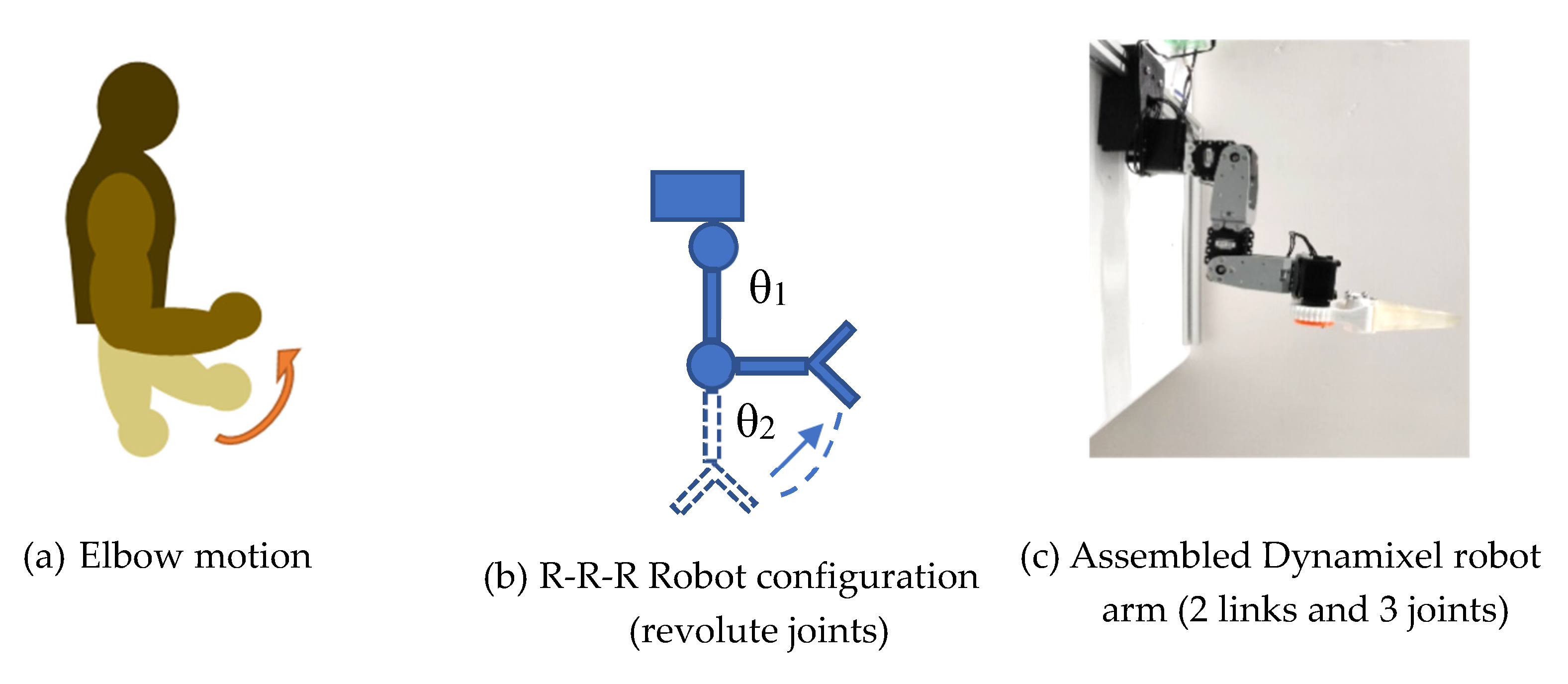
2.1.2. Robot Control
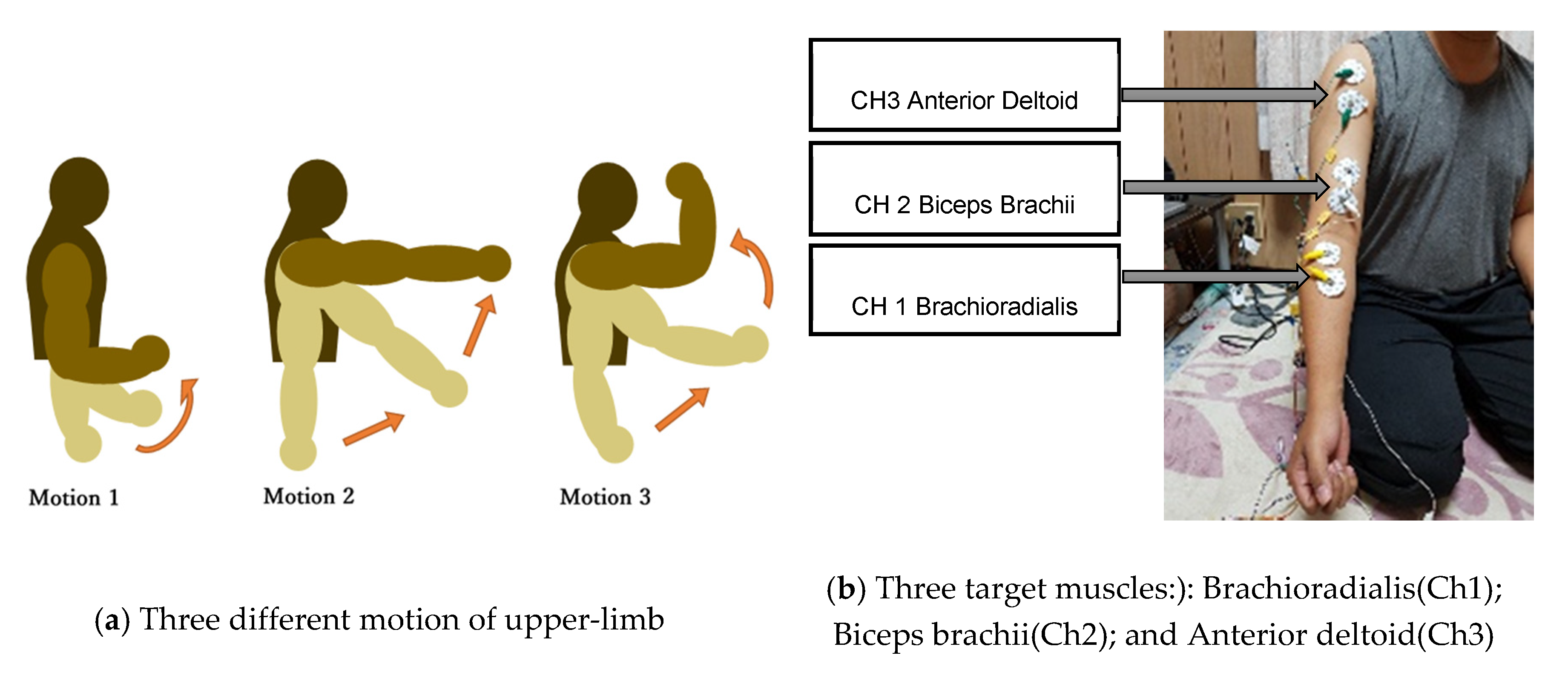
2.2. Target Upper Limb Motion
2.3. Experimental Design
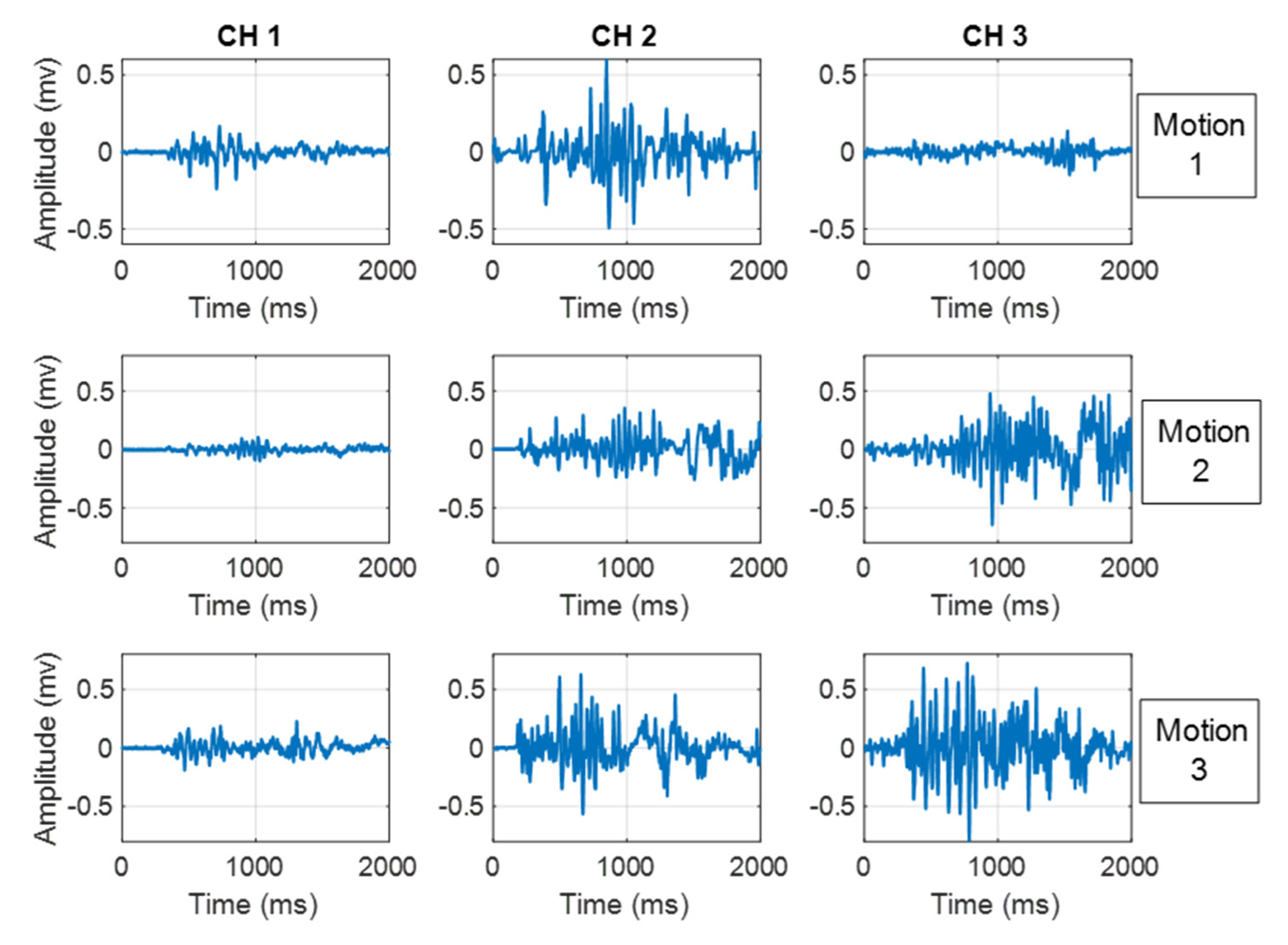
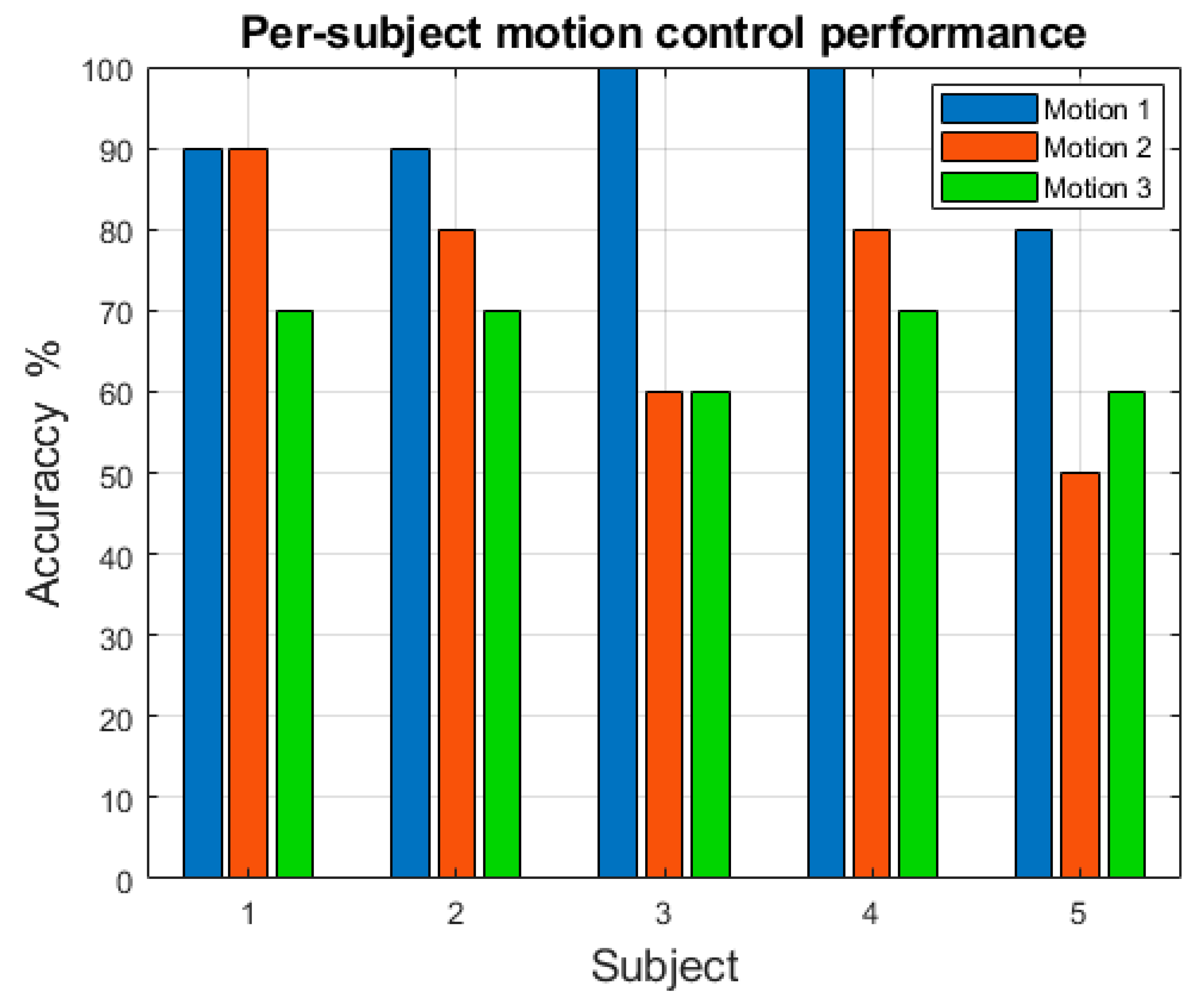
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Feleke, A.G.; Bi, L.; Guan, C. A review on EMG-based motor intention prediction of continuous human upper limb motion for human-robot collaboration. Biomed. Signal Process. Control 2019, 51, 1–17. [Google Scholar] [CrossRef]
- Bodenhagen, L.; Suvei, S.D.; Juel, W.K.; Brander, E.; Krüger, N. Robot technology for future welfare: Meeting upcoming societal challenges—An outlook with offset in the development in Scandinavia. Health Technol. 2019, 9, 197–218. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Vaishya, R.; Bahl, S.; Suman, R.; Vaish, A. Industry 4.0 technologies and their applications in fighting COVID-19 pandemic. Diabetes Metab. Syndr. Clin. Res. Rev. 2020, 14, 419–422. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.V.; Kemény, Z.; Váncza, J.; Wang, L. Human-robot collaborative assembly in cyber-physical production: Classification framework and implementation. CIRP Ann. Manuf. Technol. 2017, 66, 5–8. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.J.; Young, K.Y. An adaptive upper-arm EMG-based robot control system. Int. J. Fuzzy Syst. 2010, 12, 181–189. [Google Scholar]
- Artemiadis, P.K.; Kyriakopoulos, K.J. A switching regime model for the emg-based control of a robot arm. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 53–63. [Google Scholar] [CrossRef]
- Campeau-Lecours, A.; Cote-Allard, U.; Vu, D.S.; Routhier, F.; Gosselin, B.; Gosselin, C. Intuitive Adaptive Orientation Control for Enhanced Human-Robot Interaction. IEEE Trans. Robot. 2019, 35, 509–520. [Google Scholar] [CrossRef]
- Artemiadis, P.K.; Kyriakopoulos, K.J. An EMG-based robot control scheme robust to time-varying EMG signal features. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 582–588. [Google Scholar] [CrossRef]
- Tsuji, T.; Shibanoki, T.; Shima, K. EMG-Based Control of a Multi-Joint Robot for Operating a Glovebox. Handb. Res. Adv. Robot. Mechatronics 2015, 36–52. [Google Scholar] [CrossRef]
- Dai, H.; Song, S.; Hu, C.; Sun, B.; Lin, Z. A Novel 6-D Tracking Method by Fusion of 5-D Magnetic Tracking and 3-D Inertial Sensing. IEEE Sens. J. 2018, 18, 9640–9648. [Google Scholar] [CrossRef]
- Meattini, R.; Benatti, S.; Scarcia, U.; de Gregorio, D.; Benini, L.; Melchiorri, C. An sEMG-Based Human-Robot Interface for Robotic Hands Using Machine Learning and Synergies. IEEE Trans. Compon. Packaging Manuf. Technol. 2018, 1–10. [Google Scholar] [CrossRef]
- Cherubini, A.; Passama, R.; Crosnier, A.; Lasnier, A.; Fraisse, P. Collaborative manufacturing with physical human-robot interaction. Robot. Comput. Integr. Manuf. 2016, 40, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Shin, S.; Tafreshi, R.; Langari, R. EMG and IMU based real-time HCI using dynamic hand gestures for a multiple-DoF robot arm. J. Intell. Fuzzy Syst. 2018, 35, 861–876. [Google Scholar] [CrossRef]
- Laksono, P.W.; Sasaki, M.; Matsushita, K.; bin Suhaimi, M.S.A.; Muguro, J. Preliminary Research of Surface Electromyogram (sEMG) Signal Analysis for Robotic Arm Control. AIP Conf. Proc. 2020, 2217, 030034. [Google Scholar]
- Sasaki, M.; Matsushita, K.; Rusydi, M.I.; Laksono, P.W.; Muguro, J.; Bin Suhaimi, M.S.A.; Njeri, P.W. Robot control systems using bio-potential signals Robot Control Systems Using Bio-Potential Signals. AIP Conf. Proc. 2020, 2217, 020008. [Google Scholar]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Benatti, S.; Milosevic, B.; Farella, E.; Gruppioni, E.; Benini, L. A Prosthetic Hand Body Area Controller Based on Efficient Pattern Recognition Control Strategies. Sensors 2017, 17, 869. [Google Scholar] [CrossRef] [Green Version]
- Fukuda, O.; Tsuji, T.; Kaneko, M.; Otsuka, A. A human-assisting manipulator teleoperated by EMG signals and arm motions. IEEE Trans. Robot. Autom. 2003. [Google Scholar] [CrossRef] [Green Version]
- Artemiadis, P.K.; Kyriakopoulos, K.J. EMG-based control of a robot arm using low-dimensional embeddings. IEEE Trans. Robot. 2010, 26, 393–398. [Google Scholar] [CrossRef]
- Benchabane, S.I.; Saadia, N.; Ramdane-Cherif, A. Novel algorithm for conventional myocontrol of upper limbs prosthetics. Biomed. Signal Process. Control. 2020, 57, 101791. [Google Scholar] [CrossRef]
- Junior, J.J.A.M.; Pires, M.B.; Okida, S.; Stevan, S.L. Robotic Arm Activation using Surface Electromyography with LABVIEW. IEEE Lat. Am. Trans. 2016, 14, 3597–3605. [Google Scholar] [CrossRef]
- Nazmi, N.; Rahman, M.A.A.; Yamamoto, S.I.; Ahmad, S.A.; Zamzuri, H.; Mazlan, S.A. A review of classification techniques of EMG signals during isotonic and isometric contractions. Sensors 2016, 16, 1304. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Parajuli, N.; Sreenivasan, N.; Bifulco, P.; Cesarelli, M.; Savino, S.; Niola, V.; Esposito, D.; Hamilton, T.J.; Naik, G.R.; Gunawardana, U.; et al. Real-time EMG based pattern recognition control for hand prostheses: A review on existing methods, challenges and future implementation. Sensors 2019, 19, 4596. [Google Scholar] [CrossRef] [Green Version]
- Gopura, R.C.; Bandara, S.V.; Gunasekara, M.P. Recent Trends in EMG-Based Control Methods for Assistive Robots. In Electrodiagnosis in New Frontiers of Clinical Research; Turker, H., Ed.; 2013; Chapter 12; pp. 237–268. Available online: https://www.intechopen.com/books/electrodiagnosis-in-new-frontiers-of-clinical-research (accessed on 18 August 2020).
- Simao, M.; Mendes, N.; Gibaru, O.; Neto, P. A Review on Electromyography Decoding and Pattern Recognition for Human-Machine Interaction. IEEE Access 2019, 7, 39564–39582. [Google Scholar] [CrossRef]
- Young, A.J.; Smith, L.H.; Rouse, E.J.; Hargrove, L.J. A comparison of the real-time controllability of pattern recognition to conventional myoelectric control for discrete and simultaneous movements. J. Neuroeng. Rehabil. 2014, 11, 1–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hassan, H.F.; Abou-Loukh, S.J.; Ibraheem, I.K. Teleoperated robotic arm movement using electromyography signal with wearable Myo armband. J. King Saud. Univ. Eng. Sci. 2019, 32, 378–387. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Rasoo, G.; Iqbal, K.; Bouaynaya, N.; White, G. Real-time task discrimination for myoelectric control employing task-specific muscle synergies. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 98–108. [Google Scholar] [CrossRef] [PubMed]
- Jaramillo-Yánez, A.; Benalcázar, M.E.; Mena-Maldonado, E. Real-time hand gesture recognition using surface electromyography and machine learning: A systematic literature review. Sensors 2020, 20, 2467. [Google Scholar] [CrossRef]
- Sharma, S.; Dubey, A.K. Movement control of robot in real time using EMG signal. In Proceedings of the 2012 2nd International Conference on Power, Control and Embedded Systems (ICPCES 2012), Allahabad, India, 17–19 December 2012. [Google Scholar] [CrossRef]
- Triwiyanto, T.; Rahmawati, T.; Yulianto, E.; Mak’ruf, M.R.; Nugraha, P.C. Dynamic feature for an effective elbow-joint angle estimation based on electromyography signals. Indones. J. Electr. Eng. Comput. Sci. 2020, 19, 178–187. [Google Scholar] [CrossRef]
- Samuel, W.O.; Asogbon, M.G.; Geng, Y.; Al-Timemy, A.H.; Pirbhulal, S.; Ji, N.; Chen, S.; Fang, P.; Li, G. Intelligent EMG pattern recognition control method for upper-limb multifunctional prostheses: Advances, current challenges, and future prospects. IEEE Access 2019, 7, 10150–10165. [Google Scholar] [CrossRef]
- Hargrove, L.J.; Englehart, K.; Hudgins, B. A comparison of surface and intramuscular myoelectric signal classification. IEEE Trans. Biomed. Eng. 2007, 54, 847–853. [Google Scholar] [CrossRef] [PubMed]
- Pons, J.L. Wearable Robots: Biomechatronic Exoskeletons; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Jang, G.; Kim, J.; Choi, Y.; Yim, J. Human shoulder motion extraction using EMG signals. Int. J. Precis. Eng. Manuf. 2014, 15, 2185–2192. [Google Scholar] [CrossRef]
- Phinyomark, A.; Khushaba, R.N.; Scheme, E. Feature extraction and selection for myoelectric control based on wearable EMG sensors. Sensors 2018, 18, 1615. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bin Suhaimi, M.S.A.; Matsushita, K.; Sasaki, M.; Njeri, W. 24-Gaze-Point Calibration Method for Improving the Precision of Ac-Eog Gaze Estimation. Sensors 2019, 19, 3650. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duprey, S.; Naaim, A.; Moissenet, F.; Begon, M.; Chèze, L. Kinematic models of the upper limb joints for multibody kinematics optimisation: An overview. J. Biomech. 2017, 62, 87–94. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Farina, D.; Jiang, N.; Rehbaum, H.; Holobar, A.; Graimann, B.; Dietl, H.; Aszmann, O.C. The extraction of neural information from the surface EMG for the control of upper-limb prostheses: Emerging avenues and challenges. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 797–809. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EMG | Upper-Limb Status | Robot Arm | |||
|---|---|---|---|---|---|
| CH1 | CH2 | CH3 | Angle θ1 | Angle θ2 | |
| ON | ON | OFF | Motion 1 | 0° | 90° |
| OFF | ON | ON | Motion 2 | 90° | 0° |
| ON | ON | ON | Motion 3 | 90° | 90° |
| OFF | OFF | OFF | Do nothing | 0° | 0° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laksono, P.W.; Matsushita, K.; Suhaimi, M.S.A.b.; Kitamura, T.; Njeri, W.; Muguro, J.; Sasaki, M. Mapping Three Electromyography Signals Generated by Human Elbow and Shoulder Movements to Two Degree of Freedom Upper-Limb Robot Control. Robotics 2020, 9, 83. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040083
Laksono PW, Matsushita K, Suhaimi MSAb, Kitamura T, Njeri W, Muguro J, Sasaki M. Mapping Three Electromyography Signals Generated by Human Elbow and Shoulder Movements to Two Degree of Freedom Upper-Limb Robot Control. Robotics. 2020; 9(4):83. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040083
Chicago/Turabian StyleLaksono, Pringgo Widyo, Kojiro Matsushita, Muhammad Syaiful Amri bin Suhaimi, Takahide Kitamura, Waweru Njeri, Joseph Muguro, and Minoru Sasaki. 2020. "Mapping Three Electromyography Signals Generated by Human Elbow and Shoulder Movements to Two Degree of Freedom Upper-Limb Robot Control" Robotics 9, no. 4: 83. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040083