Robotic Development for the Nuclear Environment: Challenges and Strategy

Nuclear National Laboratory, Havelock Road, Workington, Cumbria CA143YQ, UK
*
Author to whom correspondence should be addressed.
Robotics 2020, 9(4), 94; https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040094
Submission received: 12 October 2020
/
Revised: 6 November 2020
/
Accepted: 11 November 2020
/
Published: 13 November 2020
(This article belongs to the Special Issue Advances in Robots for Hazardous Environments in the UK)
{kind=link}
{kind=link}
{kind=link}
Abstract
:Improvements in robotics and artificial intelligence have enabled robotics to be developed for use in a nuclear environment. However, the harsh environment and dangerous nature of the tasks pose several challenges in deploying robots. There may be some unique requirements for a nuclear application that a commercial system does not meet, such as radiation effects, the needs remote maintenance and deployment constraints. This paper reviews the main challenges that robots need to face to be deployed in a nuclear environment, examines the development and assessment processes required in the nuclear industry, and highlights the assistance that is available for developers. Due to comparable environments and operating restrictions, the development process employed by the nuclear industry has a similar structure as that employed by NASA and the ESA for space exploration. The nuclear industry has introduced a number of development support programs, such as Innovate and Game Changers, to fund and mentor developers through the initial design stages to proving viability in a representative independently assessed test environment. Robust and reliable technologies, which may also have application beyond the original nuclear application, are being successfully developed and tested, enabling robotics in making nuclear operations safer and more efficient. Additional development sources are given in the text.
Keywords:
nuclear robotics; radiation; deployment; development; nuclear environment; challenges; innovation1. Introduction
Recent technological improvements in the robotics and artificial intelligence (RAI) field have driven the development of intelligent robotic systems, with RAI being introduced in several applications, such as health care, entertainment, and transport.
Given the benefits achieved in several sectors, the use of robotics has also been identified as a highly recommended practice in a nuclear environment by the International Atomic Energy Agency (IAEA) and the Nuclear Decommissioning Authority (NDA) [1,2]. The key drivers of robotics applications in the nuclear sector are to avoid human exposure to hazardous environments and to increase efficiency and safety while reducing costs in performing several tasks such as inspection, maintenance, decontamination, waste handling, and post-accidental activities. This increasing need is not only due to the advancement in robotics but also associated to the raising concern related to the human and environmental safety, especially after the Fukushima accident [3]. Thus, the demand of RAI systems has been growing in the nuclear industry in order to increase the safety and efficiency of nuclear facilities, to detect anomalies through an inspection, and to protect the human workers in a radioactive environment [4].
Robotic systems that could be used in the nuclear industry have been developed for decades, whilst the most significant technological advances have taken place recently. Currently, the nuclear industry utilises tele-operated robots to handle dangerous tasks in hazardous environments, but also for mobile monitoring and surveillance and cleaning tasks. These advances have helped to enable access to previously restricted spaces and have improved efficiency, thus reducing the workface time that human operators are exposed to radiation and the need for operator’s access in contaminated environments [5,6]. Even though the human operator is still in the control loop, robotic subsystems capabilities have improved significantly. However, development specifically for the nuclear industry has been limited by comparison to other industries. After the Fukushima Daiichi nuclear power plant accident, many robotic systems have been deployed. Many of these had to be developed after the incident as existing robotic technologies were either not suitable or available [7].
Some robotic systems have been tested and applied in nuclear environments [3,4,8]; however, more often, they have only been applied for limited tasks, or they did not evolve beyond the research stage.
The aim of this paper is to provide broad information about the main challenges that robots face to be deployed in a nuclear environment and suggest possible solutions to bridge the gap between research and innovative technologies and deployment in the nuclear industry.
Thus, this paper provides a thorough insight on how to approach research and development, tailoring the outcome to be nuclear-industry-specific. In the next section, the main challenges in deploying robotics in the nuclear industry are discussed, while Section 3 focuses on what is required to bring a technology from a research prototype to the use in an industrial nuclear environment. Finally, Section 4 discusses some case studies as examples, followed by conclusions.
2. Challenges in Deploying Robotic Technologies in the Nuclear Environment
Development of robotic technology for applications within industrial sectors is increasing at an accelerating rate. Robotics have been developed for application in sectors such as automotive and pharmaceutical industries for some years; however, now, all sectors of industry are starting to benefit from robotic technologies. Improved productivity, increased safety and cost reduction are frequently highlighted as benefits for using robotic technologies in highly structured environments; however, as the technology develops, these benefits are starting to be realised in more complex and unstructured working environments carrying out non-repetitive tasks. As these applications develop, the opportunity to transfer technologies between applications also grows. There is an overlap between what nuclear applications need from robotic technologies and what other applications require; therefore, nuclear applications will be able to reap the rewards of the accelerated developments that are taking place in other sectors and vice versa.
In the past, developing bespoke equipment has often been the default route for nuclear applications; however, this does not always deliver the best solution. Other commercial developments and applications could provide directly transferable technologies and solutions. An example of this could be in tele-operated robot hand control: an ergonomically designed multi-function robust handheld joystick controller can be used for many hours without causing the operator discomfort. Developing and testing such a device would cost a considerable amount of time and money; however, the video gaming industry has spent many years and considerable expenditure developing a reliable handheld controller for game consoles. Therefore, it would make sense to consider the transferability of their commercial off-the-shelf (COTS) technology to nuclear applications.
However, the harsh environment and dangerous nature of nuclear-related tasks pose several challenges in deploying robots. In some cases, there may be some unique requirements for a nuclear application that a commercial system does not meet. These may be influenced by the operating environment or methods and, for example, require changes in material or a higher ingress protection (IP) rating to allow for decontamination. Ideally, a technology should be maintenance-free, as very often, once deployed, there will be no further human access possible. These additional requirements may not preclude a commercial product but may require some adaptation or modification. Modification to a COTS product would make it a modified off-the-shelf (MOTS) solution; any modifications to a product are generally carried out with the cooperation of the original manufacturers or at the least an acknowledgment from the original manufacturer modifications to not adversely impact the function of the product being modified. Examples of modifications could be the relocation of sensitive electronics away from areas of radiation exposure or the fitting of additional brackets to make an item easier for a robotic gripper to manipulate. While COTS is preferable, it can still be a lot cheaper and faster to deploy a MOTS solution rather than developing from scratch.
When considering COTS equipment and what modification we may need to make, it is important to bear in mind the as-low-as-reasonably-practicable (ALARP) principle. For example, a radioactive environment is known to affect electronics. This does not mean all electronics needs to be removed from the operating environment; there are many simple modifications that can be made to mitigate the effect, if it needs mitigating against. Electronics, while sensitive to radiation, are still a lot more resilient than humans.
In many cases the cost of modification may not be cost-effective. If an assessment is made that a device may become unreliable after a year of use due to detrition of insulating materials, the cost of a COTS product may be low enough that replacement after six months is cheaper, faster, and more cost-effective than developing a MOTS or custom product. This would meet the ALARP principle and allow a task to be started sooner than if a custom or MOTS solution was pursued.
Before being able to use a chosen system, it will need to be validated and verified to ensure that the system will perform as desired and that it will survive the environment it is being deployed into long enough to justify its use. For this reason, careful testing and the planning of trials becomes as important as the design, a cost often ignored at the planning stage. Crucially, in many cases, a robot will not leave a radioactive environment as anything other than waste for disposal. This is due to the difficulty and cost of decontamination; thus, reliability of operation is of the upmost importance. It is also very important to take a holistic view of an entire process when developing a robotic solution, not only how a device functions in performing its task, but also how it will be deployed, decommissioned, and what happens when it goes wrong.
2.1. Maintenance and Recovery
One of the most important requirements to consider when deploying robotic systems into hazardous nuclear environments is the ability to fail safe and be able to safely recover the equipment in order to repair or replace it, in the event of some sort of failure mode. In certain circumstances, it may be more suitable and cost-effective to abandon the equipment, and dispose of it as waste, rather than attempt to decontaminate and repair it. However, even in this latter case, it is essential that the robotic system is designed so that it can be remotely recovered to a status where it does not interfere with the subsequent plant process operations.
Deploying robotic technologies into a highly radioactive and contaminated environment produces significant challenges when considering the maintenance requirements of the equipment. The radiation and contamination levels are usually so high that man access to the operating area for maintenance or repair purposes is prohibited. An alternative strategy is to remotely recover the system to an area where it can be decontaminated to permit hands-on access for repair and replacement maintenance activities. However, these process interruptions can be costly in terms of down time and the exposure of operators wearing protective equipment to hazardous tasks.
Thus, when developing robotic technologies, there is a strong requirement for very high equipment reliability and very low equipment maintenance needs. Hence, the preference for selecting technologies with high technology readiness levels (TRLs) [9], and for using COTS equipment, which has well-proven track records of performance and reliability, rather than designing bespoke from scratch.
Often there is a need to modify COTS equipment to make it more suitable for deployment in a nuclear environment. Examples of this may include:
- Relocating electronics components out of the direct radiation exposure or alternatively providing shielding to them.
- Replacing certain vulnerable components, which can be damaged by radiation with ones that are more radiation tolerant, e.g., certain polymeric seals and greases, electronic components.
- Providing additional features to enable equipment recovery in the event of a failure mode, e.g., secondary drive mechanisms.
- Increasing equipment resilience in certain areas by, for example, providing additional physical protection, guarding snagging points, minimising contamination traps, or providing gaiters or covers, etc.
However, it should be noted that there is a preference for minimising any possible modifications to COTS equipment to only those that are deemed as absolutely essential for nuclear application. This reduces the likelihood of altering the reliable performance and behaviour of the standard COTS equipment.
The overall reliability of robotic systems can also be improved (and correspondingly the maintenance requirements reduced) by measures such as:
- Providing redundancy and back-ups in equipment, such that failure of one element does not necessarily mean total loss of the whole system.
- Providing modularity in the design to assist with quick and easy changeover of components upon failure.
- Reducing equipment complexity.
2.2. Environmental Factors
Deploying a robot in the nuclear industry uniquely means that the type of environment will be subject to a radiation field. It follows that environmental effects, which may include conventional “hazardous” attributes, are also influenced by the impact of radiation on the materials and engineered systems within the robot as a whole. Thus, robots for deployment in the nuclear industry must have resilience; in addition to careful materials selection, recognition of possible robot malfunction is prudent, and countermeasures need to be considered [10,11].
An important part of assessing environmental effects on a robot in a nuclear environment is to understand the necessary mission. Rather than the task(s) to perform, this means the envelope of conditions within which the task(s) are executed. The radiation field to be expected should be quantified, both in terms of the type of radiation, the expected dose rate, and also, the time the robot will spend in the radiation field (will it be 24/7 or will the robot work 9–5 on weekdays, being sheltered when idle?). A very common first task a robotic vehicle is required to carry out when entering a remote location will be to gather this information if it is not known. In this case, an indication of the likely environment will be known, as the area operator will know what radiological materials were used in an area originally. In addition, it is crucial to assess what the IP factor is (for dust or liquid), preventing direct access of radioactive materials to vulnerable components. Key factors to establish are whether the robot will be retrievable for repair and maintenance or will spend its working life beyond the reach of a service engineer; what is the design life of the robot and if the robot has to be replaced at some point, regardless of its physical condition.
Certain materials are vulnerable to radiation. For example, organic polymers and oils may (depending on the specific compound) degrade by mechanisms that physically weaken the polymer and may cause outgassing of product molecules, some of which may be corrosive gases. Historically, research organisations such as the European Organization for Nuclear Research (CERN) [12,13] and Electric Power Research Institute (EPRI) [14] commissioned review summaries of material performance. However, the development of novel copolymers and the ever-evolving formulation of polymer additives mean that those summaries are no longer comprehensive. Historical tests generally failed to simulate the effect of materials flexing or stretching during the irradiation period. Robots generally move, so this aspect of polymers under irradiation may be misrepresented in test data. It has also long been recognised that the effects of radiation on electronic or computer systems can be significant (single-event upset, leading to latch-up); similarly, effects on electronic systems and components (particularly metal oxide semiconductors) have been described [15], together with a description of the effects of radiation on image sensors [16] and television cameras [17] (leading to white-out). Consequently radiation-hardened systems and components have been developed [18,19]. These are generally expensive; therefore, they need to be specified only if genuinely required. The tension between the development of novel materials and measuring their radiation resistance and developing means of improving it if necessary is a recurring and continuing theme in the assessment of the effect of the environment on robots.
2.3. Safety Assessment
A robot safety assessment, often referred to as a safety case in the nuclear industry, uses a standard frequency/consequence matrix approach, with risk scores being broadly defined as acceptable, tolerable, or intolerable. Suitable and proportionate defence in depth engineering and/or operational safety measures are identified to ensure the risk is reduced to a score of acceptable and ALARP. When the facility design, or the nature of the task, does not permit operation of the robot with operators in close proximity, the main safety concern related to impact damage resulting in the potential for a radiological and/or chemotoxic release, or hazards due to the failure of containment. The containment of a hazardous material could range from a container to an entire room, the integrity of which must be maintained. There is the need for a multiple safety system to be implemented within the robotic system; these focus on limiting the robot’s movement to a controlled safe working area and reducing the amount of human intervention required in order to reduce rig downtime. For instance, the access door to the industrial robot enclosure must be interlocked with the robotic movement to prevent access to the enclosure during usage. Furthermore, the robot should have physical hard-stops installed in each joint to limit robot joint range to prevent any potential damage to the enclosure structure.
2.4. Deployment and Decommissioning Restrictions
In addition to a particular task a robotic system needs to carry out, the method of deployment must also be taken into account. Many nuclear environments are only accessible through access ports that could be only 160 mm in diameter; often work areas can be underwater. In addition to access restrictions, the area the robot needs to work in could be many meters away from an access port. Very often the innovation behind a very simple task can be the mechanism developed to reach the task site. For instance, development of the miniature robot for restricted access exploration, or MIRRAX for short, as explained in Section 4. This is an example of an innovative delivery system to deploy sensors into a difficult to reach area.
Communications with remotely operated vehicles within a nuclear environment can be a challenge. The use of wireless communications such as Wi-Fi can be severely limited when used in an environment that contains high levels of shielding and robots that rely on wireless communications must be tolerant to signal loss. The use of an umbilical is most common for underwater remote operated vehicles (ROVs) and ground-based vehicles, as it provides power for unlimited operating time and reliable communications. An umbilical can also provide a very useful recovery mechanism in the event of a failure. While an umbilical provides some advantages, the challenge of cable management cannot be underestimated. The use of drones within nuclear applications has only recently been explored with some success, one example is the development of Remote Intelligence Survey Equipment for Radiation (Riser), a survey drone used on the Sellafield site, development of which was funded through an Innovate UK program [20].
In addition to deployment restrictions, the robotic system must also satisfy decommissioning requirements. The processing and storage of contaminated materials is expensive and often requires many decades of monitored storage. For each material in a particular application, there needs to be a disposal route that defines how that material is processed and how it will be stored. In some cases, a material could be used that has no defined disposal route. This material must be stored where it is used until a disposal route can be developed. Waste with no disposal route is referred to as orphan waste and is a particular decommissioning problem. In order to avoid orphan waste, restrictions on the range of materials available for use in a robotic system may be enforced. This could particularly apply to chemical devices such as batteries. This is one reason why, among others, the use of wireless devices can be restricted.
Maintenance must be taken into account when an application allows for it. This is often available in some nuclear environments; however, restrictions in terms of access or time may apply. When developing any system for long-term deployment in a nuclear environment, ease of maintenance must be observed. Historically, there have been examples of robotic deployment within a glove box that removed an operator. Unfortunately, the robot was so complex and difficult to maintain that the hazards to maintenance personnel were greater than the original hazard faced by the operators. Ultimately, this caused the robotic system to be decommissioned. During development and as a robotic system moves through TRL levels 6 to 8, its deployment, decommissioning, and maintenance ability will be assessed. Unfortunately, it is possible for a robotic system that is able to perform a task in a reliable and innovative way to fail to reach TRL level 8 and be deployed due to the difficulties described above. Due to the deployment, maintenance, and decommissioning restrictions that exist within nuclear applications, the principle of ALARP is widely applied to technology. If equipment that carries out a task is going to be treated as waste if it fails or at the end of a task, then reliability of operation is of extreme importance.
2.4.1. Standardised System Architecture
A number of key challenges exist when deploying robotic deployments in the nuclear industry. Currently one of the biggest is that of system architecture. There is a requirement to reduce the number of bespoke systems that are being used and developed. This is primarily due to the high cost of deployment and maintenance when every system is unique and requires its own specific safety case. While every application may be unique and will require a safety case to be made for its physical operation, when an assessment also has to be made for a system’s internal architecture, the difficulties in deployment can escalate. This is particularly difficult when systems designed to carry out similar tasks or replace a previous system that is coming to the end of its working life is so different in its architecture that none of the previous safety cases or reliability data can be applied. The current non-standardisation of system architectures and the desire to introduce COTS or MOTS solutions can create contradictory requirements. For example, COTS systems are produced by individual industrial developers who tailor their architecture for their application requirements and will issue system updates independently of other manufactures. Ideally, the nuclear industry would like all robotic systems to share not only the same core architecture but also the same validated version of that core system across all development. In order to meet this requirement, a single industry standard would be needed that meets the nuclear industry’s requirements. This would need to be carefully worded so as not to stifle independent industrial development. That single standard architecture does not presently exist.
To solve this dilemma, a number of changes need to occur. Over the past few years, some systems previously not considered for use in the nuclear industry have been adopted. This occurred when pressure from three different factors combined; namely, when those systems achieved a strong historic reliability and safety record in real world use, the introduction of well-defined national safety standards enabling independent third-party evaluation and certification, and finally, a requirement to solve a nuclear application to a reasonable budget and time frame, we reached a point that made the adoption of the technology acceptable and cost-effective. A good example of this is the use of robotic arms manufactured by Kuka and ABB, among others, in supporting some nuclear operations.
Currently, within the nuclear industry, there is significant work being carried out to address this issue, however no definitive universal solution has yet been defined, and so, currently, each system architecture must be evaluated on its own merits. While work towards an industry wide solution is sought, robotic systems need to adopt a development approach that allows for evaluation and provides proof of reliability and operational stability. This will place a particular emphasis on code documentation, version control, and verification—disciplines many software writers find burdensome and restrictive. If it is assumed that any robotic system considered for the nuclear industry must be able to conform, at least, to recognised national and international standards then these best practices will need to be adopted.
2.4.2. Regulatory Framework
With the increased use of robotics and autonomous systems in everyday life, the regulatory systems in many countries, and internationally, are introducing more appropriate standards that address many of the issues. These standards, while not directly applying to the nuclear industry, can help the acceptance of a system for use in a nuclear application. The development of powerful robotic systems designed to work in close co-operation with humans, such as self-driving cars and co-robots, that could cause severe injury or death if they malfunction has prompted a better defined and structured regulatory framework. The development and adoption of standards (such as ANSI/RIA R15.06-2012 Industrial Robots and Robot Systems—Safety Requirements, and ISO 13,482 for personal care robots in 2014) can provide the evaluation framework, third party evaluation, and certification that assists in the adoption of robotic systems in the nuclear industry. An example of this could be a robot arm designed to perform tasks within a glove box. Due to the nature of the materials within a glove box, there may be a requirement that the arm should not be capable of causing damage both inside the glove box and to the glove box itself, putting containment at risk. It may not be unreasonable to assume that a robot arm, certified to ISO 13,482, and is safe to use as a personal care robot, could be applied to this application. In this case, the glove box could be considered as fragile and as susceptible to damage as an elderly person that the robot is certified to work with is susceptible to injury. While not a perfect fit to the glove box requirements, the ISO standard does assist in offering a way forward for evaluation and acceptance. In 2019, an Omron LD90 warehouse robot was demonstrated within a nuclear (non-active) licensed site for survey use. This was permitted partly because the vehicle conformed to ANSI B56.5-2019, a standard for guided industrial vehicles.
In order to take full advantage of the current regulatory framework, developers need to apply and adopt existing standards in a way that will assist in the evaluation of robotic systems for use in the nuclear industry.
3. Bridging the Gap between Research and Deployment in Nuclear Environment: How to Achieve a High Technology Readiness Level
The technology readiness level was originated by NASA in the early 1970s, providing an evaluation framework for the assessment of a technology’s stage of development for use in a hazardous environments. In recent years, the use of TRL levels has become more universally adopted beyond space exploration with a number of organisations using a TRL scale based upon the original NASA model. Up until 2013, TRL levels were primarily used by the UK nuclear industry, US military, UK military, and both US and European space agencies. With the start of the European Union H2020 development program, the TRL method of technology assessment was applied to all technology areas within Europe. Although there are slight wording differences between TRL assessment systems, the levels are all broadly the same across all commonly used TRL assessment schemes. It is important to recognise that TRL levels apply to software and operating systems as much as to a system’s physical structure and performance.
Research within a laboratory environment has the potential to achieve TRL 1–3, regarded as the science of the developed concept, while gaining TRL 4 (working prototype) and higher requires the use of an industrial test rig. TRL level 4 can be achieved by developers independently, however for a system to be deployable within the nuclear environment, a TRL level of 6 (pilot scale prototype validated in a relevant environment) will be required as a minimum. It is often difficult to bridge the divide between basic research and a commercially ready product, and this gap is referred to as the “valley of death”. Bridging this gap is crucial for introducing innovation in the nuclear industry. The valley of death is, therefore, considered as a critical challenge that results in several lost innovation opportunities. There is a variety of obstacles that results in many lost potential nuclear robotic solutions, among them the high cost and high risk of robotics. There are a number of possible routes across the “valley of death” and which one is most appropriate for a developer will be dictated by a number of different factors. Following are a couple of suggested routes that could be perused.
A developer, be it academia or a private company, could work with a national research organisation or laboratory. These organisations are often government funded and accessed directly or through innovation programs (see routes to innovation below). A national development organisation can assist in developing a low TRL idea into an engineered solution, by acting as a liaison between developers, researchers, and an end user. By facilitating interactions between all interested parties, providing industrial expertise and giving feedback to ensure the solutions proposed are applicable, the development organization can make sure the end user is comfortable with an emerging technology. The development organization can also provide crucial facilities for trials and demonstrations in a representative environment enabling the successful transfer of technology.
An approach that has been very successful in recent years is to work with the end user through a development or innovation organisation. These, often government-run organisations, will act as mentors, end-user-to-developer intermediaries, and evaluators and also assist in promoting a development to an end user. In many cases, grant funding is available, and they will assist in taking an idea to a high TRL level, often TRL 6. At this point, if a development meets a user’s requirement, then a development route with funding with an end use for the development can be established. This route has enabled a number of systems to successfully navigate the valley of death and is increasingly becoming the development route of choice. See the section on “routes into innovation and deployment” below for more details.
Another possible route over the “valley of death” is to pursue a commercial route. This may be a longer approach than working through a research organisation or the end user directly and could be viewed as indirect route to solving the issue. However, many technologies that have application in the nuclear industry are also applicable to other industries and applications with a much less torturous route to market. By developing a commercial product first, the technology can mature and develop a performance, reliability, and safety record through use. This will assist in bridging the gap when applying the technology to the nuclear industry. For example, a well-proven industrial technology may be credited with a TRL 6 when applied to a nuclear application and be able to enter trials within a relatively short time compared to developing a nuclear-specific technology from a much lower initial TRL. The developing company will also benefit from its existing users experience and also from the financial stability a technology with multiple applications and uses will provide.
3.1. Trials and Long-Term Reliability
Before a new robotic system can be deployed within the nuclear industry, it will need to go into a program of structured trials to demonstrate its suitability for deployment. This applies to all industries, especially nuclear. Before any system can be deployed, it must demonstrate its ability to perform a specified function it is designed for and demonstrate long-term reliability. This testing will be applied to both its physical performance as well as its software. At this stage, software verification and validation will be carried out as well as a range of trials that will test all elements of the system in an environment that will, as close as practical, replicate the expected operating conditions. For the nuclear industry, these will normally be non-active trials. For equipment that is expected to operate in high-radiation environments, there may be a requirement for separate radiation exposure trials to take place. This will involve the robotic system, or at least key elements considered to be most at risk to be exposed to a radioactive source in a controlled environment.
Trials of robotic systems will normally be carried out by independent third party companies that are able to give an impartial assessment of a systems capability. The independence of the assessment and trials is important for both the original developer and the end user to be confident that the system is robust and reliable. The trials and assessment should not be considered a pass or fail test but a process carried out in partnership with the developers, assessors, and end user. Results are fed back to the developers to give an opportunity to improve or correct any issues detected and forward to the customer to allow them to gain confidence in the robustness of the process.
In 2018, full-scale trials of a robotic waste handling plant for use in the Box Encapsulation Plant (BEP) on the Sellafield site (see Figure 1) were conducted. The project took commercially available industrial heavy foundry robots and developed a cell that could sort, size-reduce, and repack waste for efficient long-term storage. The robots used standard industrial tools, such as shears and grabs. The trials took the project from TRL level 3 to 6 and replicated the proposed design for use on site for the repacking of legacy waste. As a result of the trials, many enhancements were developed such as semi-automated housekeeping routines that will save considerable amounts of time when deployed [21]. The non-active test rig allowed the developers to refine the process and program code the robots were using, while independent assessment ensured the end user had confidence the system would perform as expected. This is an example of existing proven technology, the industrial robots, being applied in an application that had not been done before. This was the first time industrial robots were used for waste processing in this way.
3.2. Software Verification and Validation
The reliability of software has been of concern since its first use in safety critical systems. The widespread use of software in systems used in almost every aspect of life does mean that the potential for a software failure having an impact in terms of cost, time, and sometimes health including causing death is more widespread now and growing. For the nuclear industry, software reliability is of extreme importance due to the nature of the materials being handled and the environment being operated in. Before a system can be reliably deployed, it must be proven to be reliable. There are only two ways to achieve this level of confidence. The first is to deploy a software system commercially and prove its reliability over years of operation in monitored and varied industrial environments. This approach has allowed some robotic systems to be used in a nuclear environment; however, those systems are being used within the limits of their commercial applications and are not carrying out new or novel applications. For robotics that are developed specifically to carry out tasks using custom written code, a formal verification and validation procedure must be carried out. In order to be confident with the robot’s behaviour, it is crucial to specify what actions to expect from the system in particular scenarios, verify that the system actually achieves this, and validate that the requirements are what the user wants. Typically those requirements can be technical, legal, or ethical and certified by a regulator body [22]. Thus, the aim of formal verification is to prove whether such requirements hold for the model of the system against all possible scenarios and ensure they are all met in all possible executions of the system.
There are a number of international standards that have been developed to provide a framework for verification and validation, mostly by a consortium of companies led by the European Space Agency (ESA). The latest edition of its standard was issued in 2008. This standard has also led to the development of other nationally recognised standards such as IEEE 1012. While these standards apply to software development, there may also be standards that can be applicable to a robotic system. It is interesting to note that one major autonomous warehouse robot manufacturer does not quote IEEE 1012 or the ESA’s standard. They measure their robots against EN1525 (safety of industrial driverless trucks and their systems), JIS D6802 (a Japanese standard on automatic guided vehicle systems), and ANSI B56.5 (a safety standard for driverless and automatic guided industrial vehicles). This further highlights the difficulty that software developers face when trying to prove software reliability and choosing the most applicable standards to apply. In developing robotic systems’ more general standards such as ISO 26262, derived from IEC 61508, another recognised standard for electrical and electronic systems should also be considered.
In recent years, there have been a number of operating systems developed specifically for robotic applications. These systems offer the developer a veritable feast of functionality and rapid development routes, which accelerate the development process and allow prototype systems to be demonstrated at truly impressive speeds. Many of these systems are open source and contain a number of modules written to different and unknown standards. Before these systems can be deployed into a nuclear environment, some process of verification and validation will be required. This in no way reflects on the quality or stability of open source operating systems. In fact, due to the number of developers working worldwide, many modules will have been tested far more comprehensively than many commercially produced systems.
The lack of a verified and validated robotics orientated operating system is widely recognised as a challenge to the deployment of potentially new and innovative systems. Systems that have completed trials and have achieved TRL level 6 (pilot scale prototype validated in a relevant environment) can find it difficult to reach the finish line of TRL levels 8 or 9 (full deployment). Other organisations that make wide use of robotics in remote applications are experiencing the same dilemma. NASA does use the robot operating system (ROS), probably the most widely used open-source robotics system available, for prototype development but not currently for flight systems. ROS has, however, found its way into test systems on board the International Space Station within the Robonaut 2. This demonstrates that a pathway for deployment of open-source software into hazardous controlled environments can be achieved.
NASA’s experience with ROS does offer a potential light at the end of the tunnel for open source software such as ROS to be used within highly regulated environments. However, it will still require the lengthy requirements of validation and verification to be met. For a system such as ROS that relies heavily on publicly accessible libraries of code that are updated frequently for its functionality, there will be a requirement to freeze code blocks that have passed verification and validation and restrict systems only to use those libraries. This will mean that, in order to develop systems for the nuclear industry, a developer may need to restrict themselves to only use software version releases and libraries that have already achieved verification and validation status. If this approach was adopted, it would mean developers who want their systems to be early candidates for deployment will be denied the latest shiny new toys of development, at least until they have managed to pass through the verification and validation process. This is one possible solution and one that is still unclear. There is, however, a recognition within the nuclear industry that this issue is hampering and restricting innovation and if the benefits of robotics are to be used it must be solved. Currently, discussions with regulatory bodies such as the Office for Nuclear Regulation (ONR) are being carried out to address this issue.
When considering software to be validated, it is important to recognise where software can reside. While high-level systems that operate on computers are easily identified, embedded firmware within microprocessors must also undergo the same level of verification and validation. The advantage of an embedded microprocessor-based system over a higher level computer is the embedded microprocessor generally does not include an operating system, and the code is simpler by comparison to understand and document and hence verify and validate. Microprocessor code is also not generally subject to system updates and so version control can be simplified.
3.3. Routes into Innovation and Deployment
The first step in any development is to understand the problem that requires solving. For many years this has been a barrier to new companies and organisations being able to participate in developing solutions not only for the nuclear industry but for many other industries. Without a direct relationship it was difficult, if not impossible to understand the issues the end user faced and what their requirement were. The lack of a sensible conversation meant that many innovative solutions never left the confines of the laboratory or workshop because either the developer did not fully appreciate the challenge or operating restrictions, or the end user was not made aware of the solution that had been developed. Both these shortcomings are addressed by better communication between the developer and end user. To address this, many governments have established innovation and development organisations that will act as an intermediary between the developer and the end user. These organisations will initially publicise technical challenges from the end user as well as often evaluate new ideas that are presented. Over the years, there have been many organisations established both in individual nations as well as internationally. Further many nations have established specialised agencies dedicated to an individual business sector. The following examples are by no means exhaustive and are presented to give the reader an appreciation of the style of assistance that exists.
In the UK, two publicly accessible sources created to publicise challenges and opportunities are Innovate [23] and Game Changers [24]. These are UK government organisations with websites dedicated to funding innovation and publicising innovation opportunities that exist within the UK. Innovate covers all sectors of industry and also government-funded projects. Game Changers are specifically focused on challenges faced by the nuclear industry and specifically Sellafield Ltd. Grants up to 70% are common with ideas developed to TRL level 6 when direct consultation with Sellafield Ltd. will look to progressing the development further. Ideas submitted through Game Changers are assessed independently by two partner companies, National Nuclear Laboratory (NNL) and FIS360. Companies of any size and individuals are free to apply.
The Engineering and Physical Science Research Council (EPSRC) [25] is another major UK funder of innovation and research. The EPSRC is mainly focused on academia and postgraduate work but does have funding streams into industry as well.
Within Europe, there are a number of national and also pan-national development organisations that have been established. The Horizon 2020 program [26] publicises development opportunities within the EU. It provides a framework for development and is divided into four board areas, frontier research, training and career development, future and emerging technologies, and infrastructure. Very often, a project will require a team of developers to apply with an encouragement for cross border and multi-discipline cooperation. The European Commission, through its website, offers access to the Horizon 2020 program as well as others [27].
There are a number of international development programs available; one of the biggest and longest running is Eureka [28]. Established in 1985, it has grown to have a membership of over 40 countries including all EU countries. Its main function is to provide international co-operation and networking opportunities for users and developers as well as funding streams. Other countries worldwide have other notable development organisations that were primarily setup to promote develop of technology within their individual countries; the US DARPA program (Defence Advanced Research Projects Agency) [29] is one such example.
4. Case Studies
Since 2016, Sellafield Ltd. has published its Technology Development and Delivery Summary, which gives an overview of its development programs [30,31]. These guides, publicly available, give a broad outline of the range of development projects being undertaken and an assessment of their current TRL level. For each project, details of the organisations that are both carrying out the development and assisting in trialling and the technology’s assessment are provided. Each summary starts with an overview of Sellafield Ltd.’s current strategy for technology development. Any current and new developer wanting to introduce new technology to the nuclear industry will find these summaries very helpful in understanding the development process. The following two case studies are taken from the latest summary.
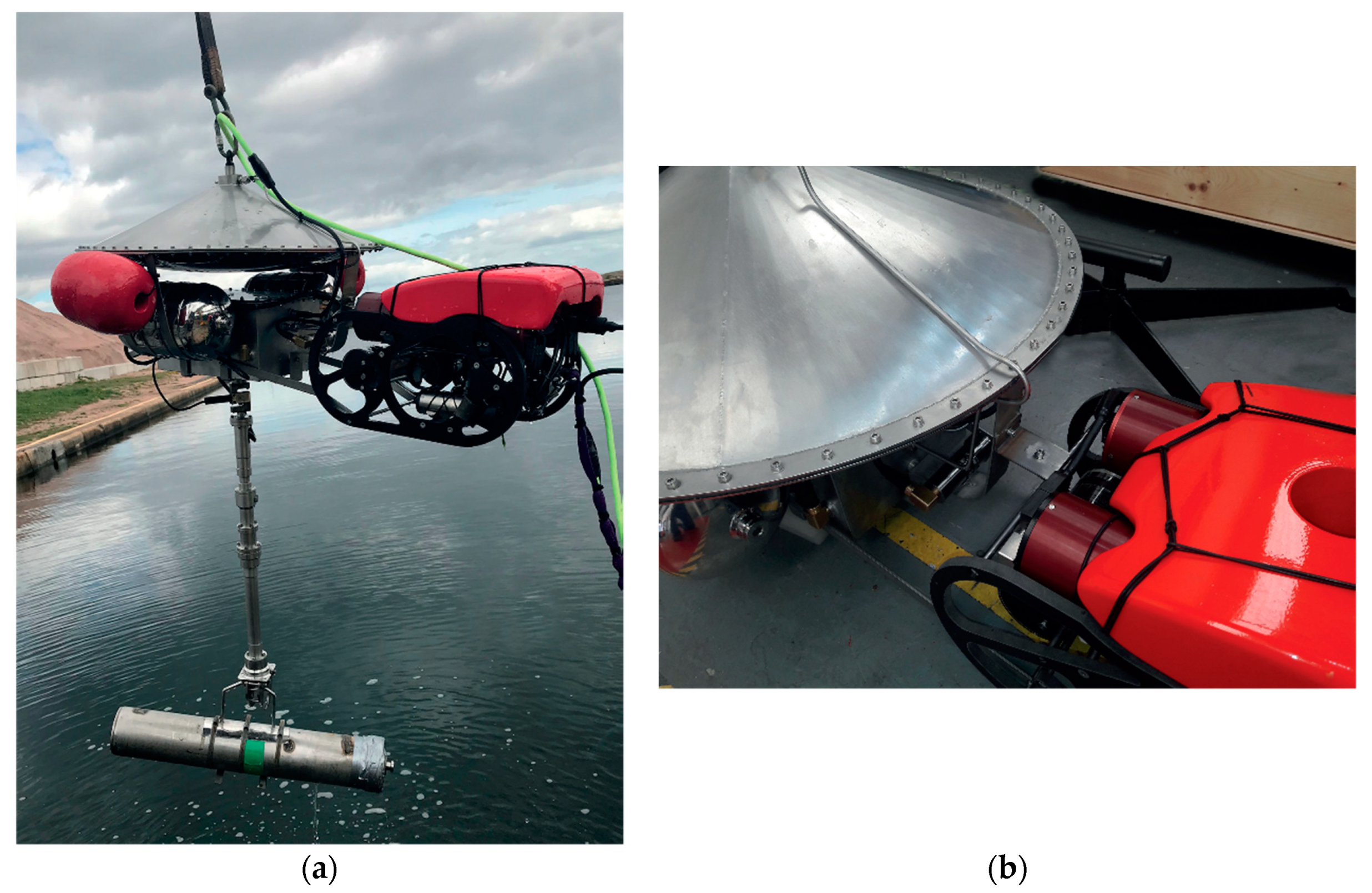
4.1. Variable Buoyancy Heavy Lift Remotely Operated Vehicle
In order to store radioactive waste safely, a number of ponds were built at the Sellafield nuclear site. These ponds, which look like very large concrete swimming pools, use water to shield the workers and environment from the waste. In order to decommission the ponds, waste items require recovery for repacking for long-term storage. A number of remote operated vehicles (ROVs) are used as part for this task to recover individual waste items, however some items like fuel rods weighing up to 30 kg lying within very light sludge posed a particular problem, as standard ROVs could not recover them without disturbing the sludge and losing visibility.
This problem was shared with supplier ROVTech, an ROV development and operations company, who proposed a variable buoyancy solution. Working with funding through Innovate UK and the National Nuclear Laboratory (NNL), ROVTech was able to develop the idea from its initial TRL 3 (Analytical and experimental proof of critical functions) stage to TRL 6 (pilot scale prototype validated in a relevant environment).
In 2018, the variable buoyancy heavy lift remotely operated vehicle (see Figure 2) was trialled at a number of locations. The trials were overseen by NNL. The system was able to recover heavy items from a pond without causing disturbance by avoiding the use of thrusters and achieving the lift by inflating an internal bladder.
NNL’s role in the trials was to act as independent assessors, develop a trial schedule, and to advise the developers as to the end users requirements when issues were identified. Trials were carried out initially at the developers’ location; however, final trials were carried out at NNL’s test facility (usually final trials of any system are carried out at the assessment company or organisation’s facilities to ensure a neutral and fair test environment for both developer and end user).
The trials undertaken were defined by NNL using the original scope documents issued by the end user to the developer. Once the end user agrees to the test schedule, the trials can start. During trials of the variable buoyancy ROV, a number of issues were identified by NNL and the end user. After discussion, a plan was agreed to address the issues and further trials put in place to test the modifications. After prolonged testing, the modifications were verified by NNL and successfully demonstrated to the satisfaction of the end user. This demonstrated the co-operative relationship between the developers and NNL in conducting supervised trials and feeding information back to increase reliability and robustness. This project took the prototype from TRL level 3, a proof of principle, to TRL level 6, ready for representative trials. Trials of this system are ongoing into 2019, and it has now been delivered to the Sellafield site achieving a high TRL score.
This project demonstrates the process of working through an innovation scheme in partnership with a national laboratory. The program was effective in guiding the developers through the end users requirements via the NNL as an independent assessor and intermediary. On one occasion after a trial, additional instrumentation was identified by NNL as a requirement to meet end user expectations. The requirement was discussed with the developer and rectified for the next trials smoothing the development process and ensuring early customer acceptance of the overall system.
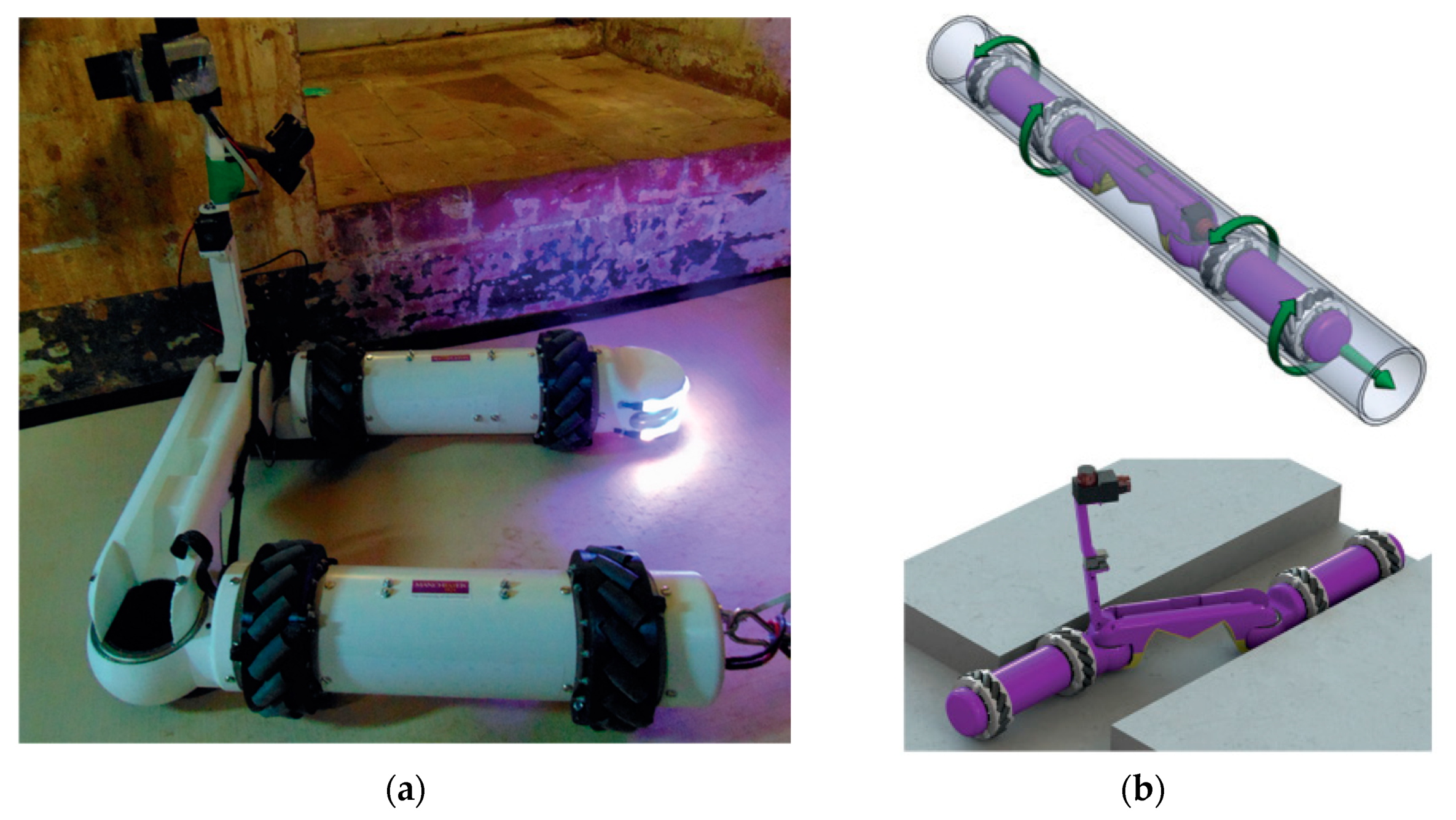
4.2. MIRRAX (MIniature Robot for Restricted Access eXploration)
The University of Manchester has been working with Sellafield Ltd. over a number of years to develop the MIRRAX remote-operated ground vehicle (in Figure 3) [30,31]. The vehicle is able to reconfigure itself to fit down a 150 mm diameter access port or move on a flat surface, much like a standard ground robot vehicle. It incorporates a central payload area with extending arm. The vehicle has been developed to enter and survey areas difficult to access by human operators. The prototype vehicle carries a light detection and ranging (LiDAR) feature and other payloads are planned. Sellafield worked with developers by defining specific scenario driven development programs that gave the university a framework to work to.
In March 2018, the vehicle was deployed into the First Generation Reprocessing Plant (FGRP) to scan an area of interest. After successful deployment, the LiDAR was recovered for later use, while the vehicle itself was disposed of, due to possible contamination, as planned. This project delivered a 3D map of the area. Future plans include to further develop the vehicle to carry radiological detection sensors to semi-remotely 3D scan an area giving 3D data with radiological overlay in real time. Furthermore, there are plans to extend the sensing range of MIRRAX to include leak detection and corrosion mapping.
The trials conducted by Sellafield Ltd. have allowed Manchester University to demonstrate the development of a low cost disposable platform for remote characterisation work. The vehicle currently sits at TRL 5 with further trials planned [30,31].
This project, which was funded through the EPSRC [25], demonstrates the importance of direct communication with end users and developers. The requirement for a reconfigurable large area survey vehicle that can navigate through a small 150 mm diameter aperture before reconfiguring itself is novel and will have limited application outside the nuclear industry. It is an example of a robotics application that would not have reached deployable maturity outside of direct communication and working closely with the end user, in this case, Sellafield. During the development, the end user was involved in early non-active trials by providing a test environment. It was found that the vehicle fitted through 150 mm diameter penetrations within the laboratory, but, due to the variations in construction within old buildings, the vehicle did not fit through a penetration. The vehicle was re-designed to give greater clearance before being successfully trialled. This demonstrates the requirements for systems to be tested in real-world environments as soon as possible in their development to discover issues that may not be immediately apparent from an design brief. This is only possible through working closely with and involving the end user within the development process as much as possible.
The MIRRAX uses the robot operating system (ROS) for its control system. This was one reason the vehicle only reached a TRL of 5. However, this did not prevent a trial in a radiological active area with the end user. The vehicle was able to carry out a 3D survey of an area that had not been entered for 30 years. This was only possible by developing a good working relationship with Sellafield giving them the confidence to sponsor such a trial.
5. Conclusions
Bridging the gap between robotic research and development in other sectors and deployment in the nuclear industry can be seen as a complex process governed by a number of variables. The purpose of this paper is to identify these challenges and discuss possible methodologies to overcome them.
When considering a harsh environment for robotics, it can seem at times that the description should not just be applied to the operating environment but also to the development process as well, and this can seem especially true when it comes to developments for the nuclear industry. The process employed by the nuclear industry has at its roots a similar structure as that employed by NASA and the ESA for space exploration. In many ways, the environment and operating restrictions that apply to space developments also apply to a nuclear application. Often, any technology that is deployed will have little or no opportunity for maintenance, and its operation must be very reliable. Unlike space exportation where disposal of failed or redundant technology is not often an issue, the cost of disposal of equipment used in a nuclear application is very high. For these reasons, the TRL assessment scale for technology is employed.
It has been recognised that there can be difficulty for developers to prove the viability of new and novel developments that could be of significant benefit to various industries and nuclear applications in particular. In the past, development has only been viable for large well-funded organisations, and this has limited innovation by individuals and small companies. Proving the reliability of technologies has been left to commercial applications, which has limited novel and new ideas that may have limited application outside a specialist industry, such as nuclear, from developing to maturity. For this reason, national and international funding and research bodies have been established. Within the UK’s nuclear industry, particularly through Sellafield Ltd., a number of development support programs have been introduced. These programs fund and, more importantly, mentor developers through the initial design stages to proving viability in a representative, independently assessed test environment. These development initiatives are enabling new robotic technologies and applying them to some of the most difficult problems facing the nuclear industry.
Programs throughout the world are offering developers, through publicised challenge statements, opportunities to apply both existing technologies and new ideas to development applications. These opportunities cover all disciplines of science and technology. The development opportunities, programs, and funding that are in most cases publicly available, combined with the TRL assessment structure, is enabling robust and reliable technologies to emerge that may have application beyond the original applications. The programs also provide a robust trial evaluation and communication channel with the end user, ensuring technologies are developed to a deployable level in as little time as possible. Within the nuclear industry, robotic technologies that successfully complete this development process are solving some of the most challenging harsh environment problems, making nuclear operations safer and more efficient. Successful robots can claim levels of reliability and development maturity that could normally take many years of commercial work to achieve.
Author Contributions
Investigation, R.S. and E.C.; writing—original draft, R.S. and E.C.; writing—review and editing, E.C. and C.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
It is acknowledged that other NNL experts contributed with their expertise to this paper; in particular, maintenance and recovery, Jim Harken; environmental factors, Steve Walters; and safety cases, Howard Chapman. The authors would also like to acknowledge Rustam Stolkin for the feedback and support provided.
Conflicts of Interest
The authors declare no conflict of interest.
References
- IAEA Technical Report. Nuclear Power Plant Outage Optmisation Strategy; Report no. IAEA-TECDOC-1315; Nuclear Power Engineering Section, IAEA: Vienna, Austria, 2002. [Google Scholar]
- NDA Report, Robotics and Artificial Intelligence Research and Development; Preferred Option—Issue 1, NDA Document Ref: 29469555 SMS/TS/F2-RD/004/B; Westlakes Science & Technology Park: Cumbria, UK, 2018.
- Iqbal, J.; Tahir, A.M.; ul Islam, R. Robotics for Nuclear Power Plants—Challenges and Future Perspectives. In Proceedings of the 2nd International Conference on Applied Robotics for the Power Industry, ETH Zurich, Zurich, Switzerland, 11–13 September 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 151–156. [Google Scholar]
- Kim, S.; Jung, S.H.; Lee, S.U.; Kim, C.H.; Shin, H.C.; Seo, Y.C.; Lee, N.H.; Jung, K.M. Application of robotics for the nuclear power plants in Korea. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry (CARPI 2010), Montreal, QC, Canada, 5–7 October 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–5. [Google Scholar]
- Bogue, R. Robots in the nuclear industry: A review of technologies and applications. Ind. Robot Int. J. 2011, 38, 113–118. [Google Scholar] [CrossRef]
- Gelhaus, F.E.; Roman, H.T. Robotic applications in nuclear power plants. Prog. Nucl. Energy 1990, 23, 1–33. [Google Scholar] [CrossRef]
- Tsitsimpelis, I.; Taylor, C.J.; Lennox, B.; Joyce, M.J. A review of ground-based robotic systems for the characterization of nuclear environments. Prog. Nucl. Energy 2019, 111, 109–124. [Google Scholar] [CrossRef]
- Marinceu, D.; Murchison, A.; Hatton, C. Use of Robotic Equipment in a Canadian Used Nuclear Fuel Packing Plant. In Proceedings of the 2nd International Conference on Applied Robotics for the Power Industry (CARPI), ETH Zurich, Zurich, Switzerland, 11–13 September 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 139–144. [Google Scholar]
- Guide to Technology Readiness Levels for the NDA Estate and its Supply Chain, 6th ed.; NDA, Westlakes Science & Technology Park: Cumbria, UK, 2014.
- Visinsky, M.L.; Walker, I.D.; Cavallero, A.R. Robot fault tolerance: Algorithms and architectures. In Robotics and Remote Systems for Hazardous Environment; Jamshidi, M., Eicker, P.J., Eds.; Prentice Hall: Upper Saddle River, NJ, USA, 1993; pp. 53–73. [Google Scholar]
- Walker, I.D.; Cavallero, J.R. The Use of Fault Trees for the Design of Robots for Hazardous Environments. In Proceedings of the 1996 IEEE Annual Symposium on Reliability and Maintainability, Las Vegas, NV, USA, 22–25 January 1996; p. 229. [Google Scholar]
- De Voorde, M.H.V.; Restat, C. Selection Guide to Organic Material for Nuclear Engineering; Report CERN-72-7, CERN 1972; European Organization for Nuclear Research: Geneva, Switzerland, 1972. [Google Scholar]
- Tavlet, M.; Fontaine, A.; Schonbacher, H. Compilation of Radiation Damage Test Data: Part 2, Thermoset and Thermoplastic Resins, Composite Materials; Report CERN 98-01, CERN 1998; European Organization for Nuclear Research: Geneva, Switzerland, 1998. [Google Scholar]
- Bruce, M.B.; Davis, M.V. Radiation Effects on Organic Materials in Nuclear Plants; EPRI Report NP-2129; Nuclear Engineering Dept., Georgia Inst. of Tech.: Atlanta, GA, USA, 1981. [Google Scholar]
- Holmes-Seidle, A.; Adams, L. Handbook of Radiation Effects; Oxford Science Publications: Oxford, UK, 1993. [Google Scholar]
- Bardoux, A.; Penquer, A.; Gilard, O.; Eccofet, R.; Auvergne, M. Radiation effects on image sensors. In Proceedings of the International Conference on Space Optics, Ajiacio, Corsica, 9–12 October 2012. [Google Scholar]
- Hutchins, M.F.E.S. Radiation tests on solid state cameras for instrumentation. In Proceedings of the DIPAC 2005, Lyon, France, 6–8 June 2005; p. 315. [Google Scholar]
- Rickets, L.W. Fundamentals of Nuclear Hardening of Electronic Equipment; Wiley: New York, NY, USA, 1972. [Google Scholar]
- Houssay, L.P. Robotics and Radiation Hardening in the Nuclear Industry. Master’s Thesis, University of Florida, Tampa, FL, USA, 2000. [Google Scholar]
- Sellafield: Remotely Operated Unmanned Aerial Vehicle Combined with Radiation Mapping Software. Available online: https://www.gov.uk/government/case-studies/sellafield-remotely-operated-unmanned-aerial-vehicle-combined-with-radiation-mapping-software (accessed on 1 March 2020).
- Kuo, J.; Harken, J. Box Encapsulation Robotics Project. In Proceedings of the NIST Conference February 2016: Stephen Shackleford, NIST, Gaithersburg, MD, USA, 1–5 February 2016. [Google Scholar]
- Chiarisi, V.; Dennis, L.A.; Fisher, M.; Lieck, R.; Matthias, A.; Slavkovik, M.; Sombetzki, J.; Winfield, A.F.T.; Yampolskiy, R. Towards Moral Autonomous Systems. arXiv 2017, arXiv:1703.04741. [Google Scholar]
- Innovate UK. Available online: www.gov.uk/government/organisations/innovate-uk (accessed on 7 March 2019).
- Game Changers. Available online: https://www.gamechangers.technology (accessed on 7 March 2019).
- Engineering and Physical Sciences Research Council (EPSRC). Available online: https://epsrc.ukri.org/ (accessed on 15 May 2020).
- Horizon 2020. Available online: https://ec.europa.eu/programmes/horizon2020/en (accessed on 15 May 2020).
- European Commission Research and Innovation. Available online: https://ec.europa.eu/info/research-and-innovation_en (accessed on 15 May 2020).
- Eureka. Available online: https://www.eurekanetwork.org (accessed on 15 May 2020).
- DARPA. Available online: https://www.darpa.mil/ (accessed on 15 May 2020).
- Sellafield Ltd. The 2016/17 Technology Development and Delivery Summary; Sellafield Ltd.: Cumbria, UK, 2017. [Google Scholar]
- Sellafield Ltd. The 2017/18 Technology Development and Delivery Summary; Sellafield Ltd.: Cumbria, UK, 2018. [Google Scholar]
Figure 1.
Box Encapsulation Plant (BEP) robot rig trial being carried out at National Nuclear Laboratory (NNL)’s rig hall in Workington, Cumbria, UK.
Figure 1.
Box Encapsulation Plant (BEP) robot rig trial being carried out at National Nuclear Laboratory (NNL)’s rig hall in Workington, Cumbria, UK.

Figure 2.
Variable buoyancy heavy lift remotely operated vehicle: (a) lifting trials; (b) modifications carried out from trial data.
Figure 2.
Variable buoyancy heavy lift remotely operated vehicle: (a) lifting trials; (b) modifications carried out from trial data.

Figure 3.
MIRRAX: (a) surveying an area; (b) omnidirectional capabilities.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Smith, R.; Cucco, E.; Fairbairn, C. Robotic Development for the Nuclear Environment: Challenges and Strategy. Robotics 2020, 9, 94. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040094
AMA Style
Smith R, Cucco E, Fairbairn C. Robotic Development for the Nuclear Environment: Challenges and Strategy. Robotics. 2020; 9(4):94. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040094
Chicago/Turabian StyleSmith, Richard, Elisa Cucco, and Colin Fairbairn. 2020. "Robotic Development for the Nuclear Environment: Challenges and Strategy" Robotics 9, no. 4: 94. https://0-doi-org.brum.beds.ac.uk/10.3390/robotics9040094
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.