
Micro-Topography Mapping through Terrestrial LiDAR in Densely Vegetated Coastal Environments

 , ,
, ,
Abstract
:1. Introduction
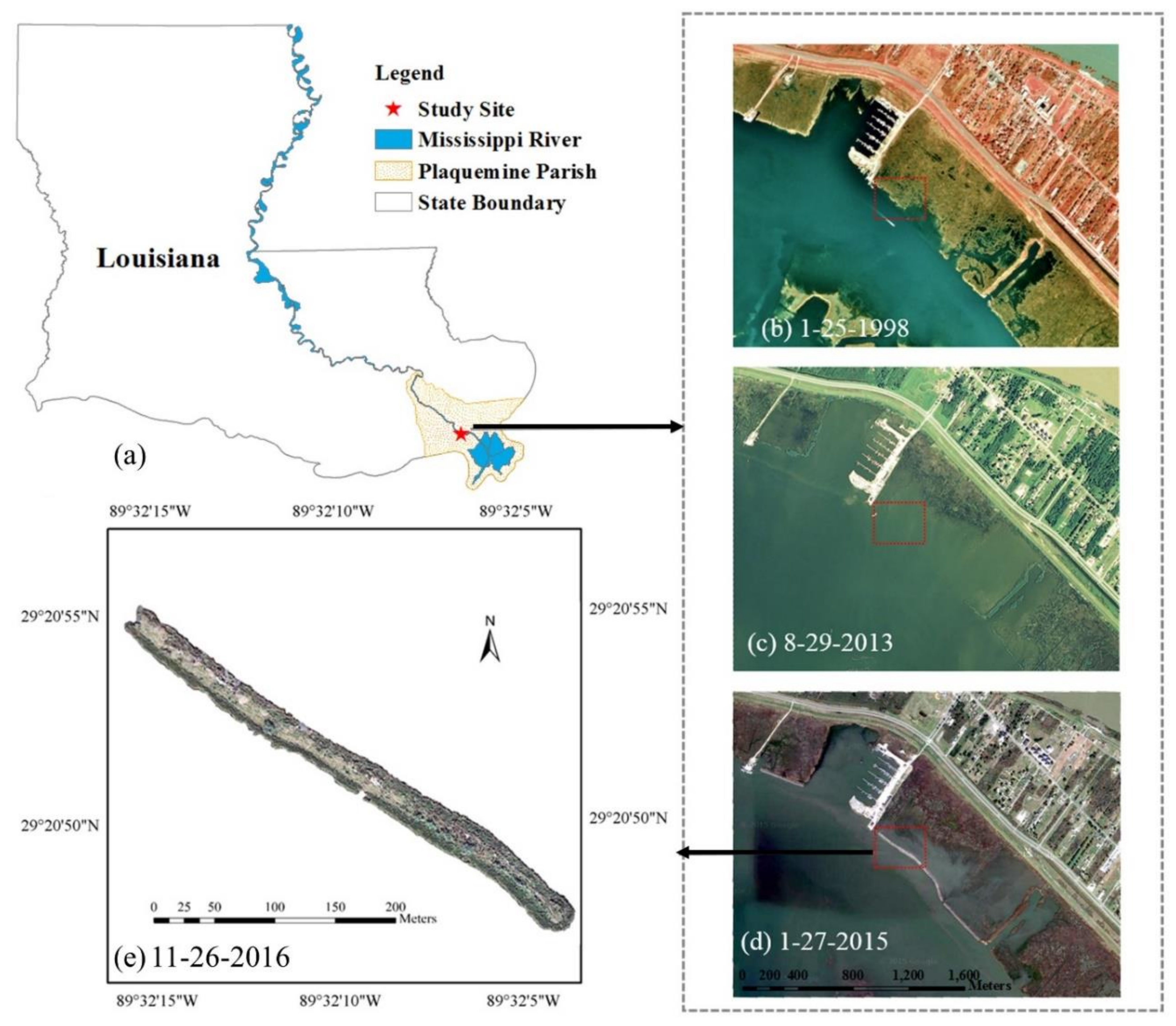
2. Study Site and Field Data Collection
3. Methodology
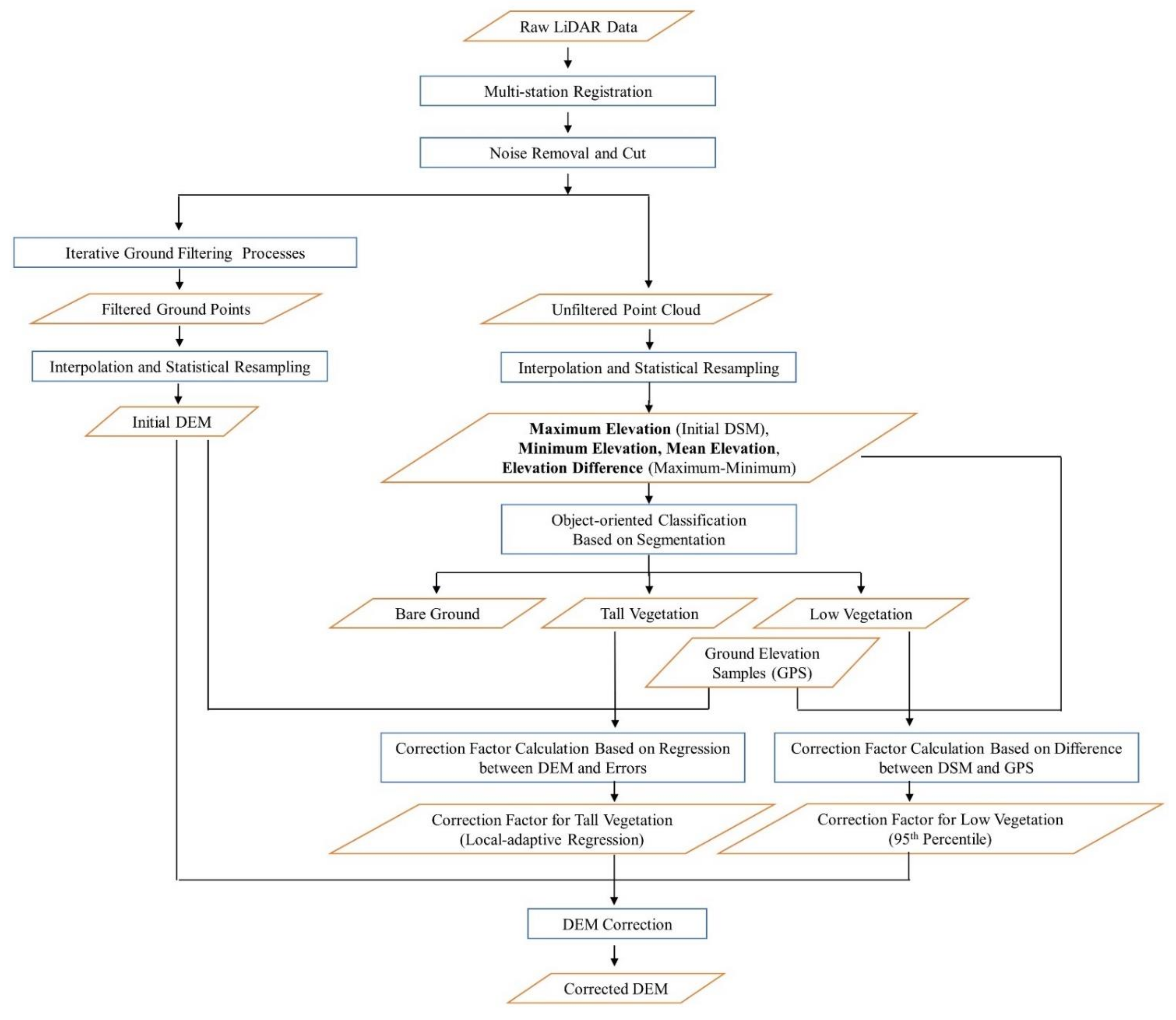
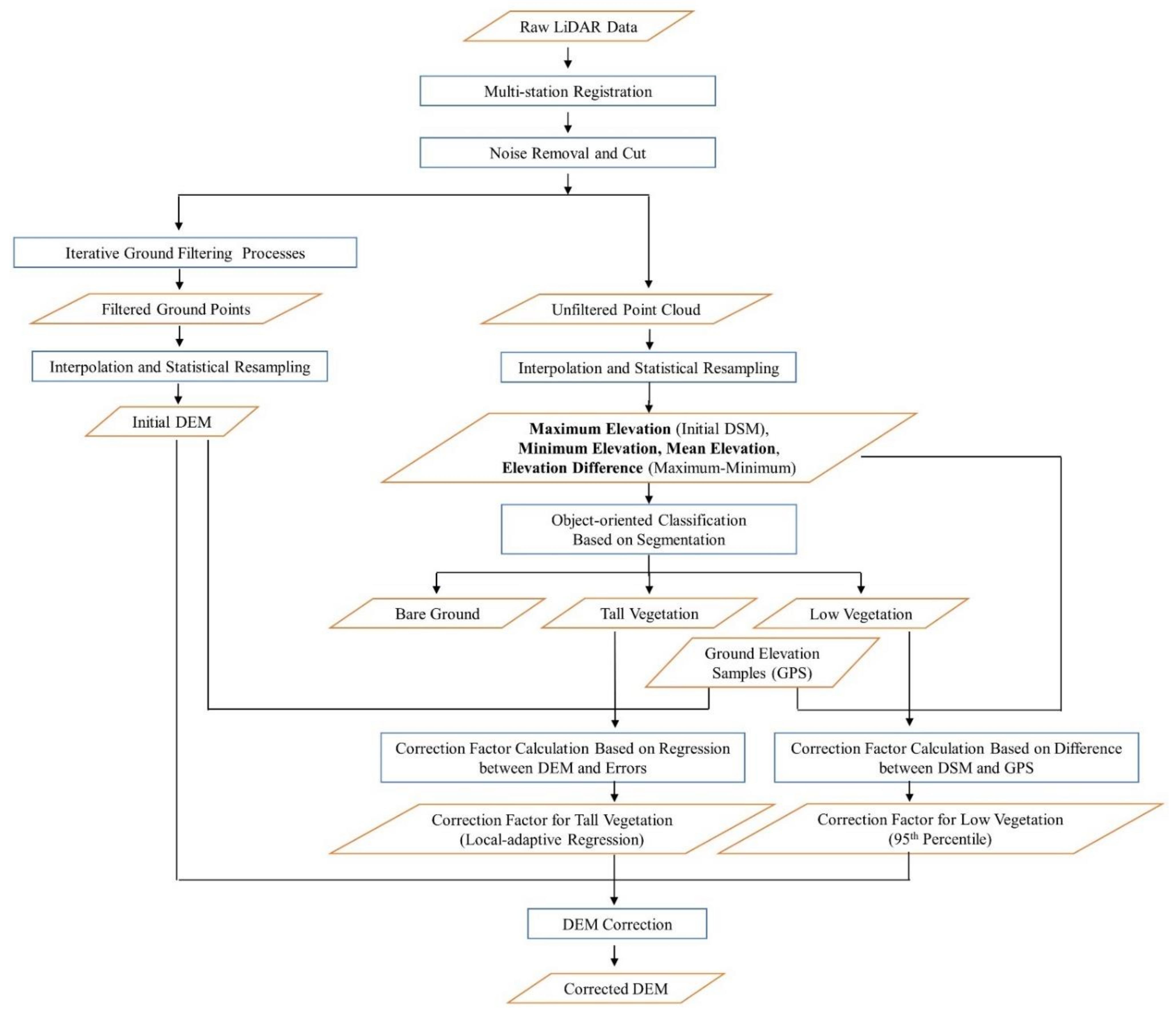
3.1. Overview of an Adaptive Method for Terrain Correction
3.2. Stage 1: Initial DEM Generation
3.3. Stage 2: Object-Oriented Classification
3.4. Stage 3: Terrain Correction
3.4.1. DEM Correction for Tall Vegetation
3.4.2. DEM Correction for Low Vegetation
4. Results and Discussion
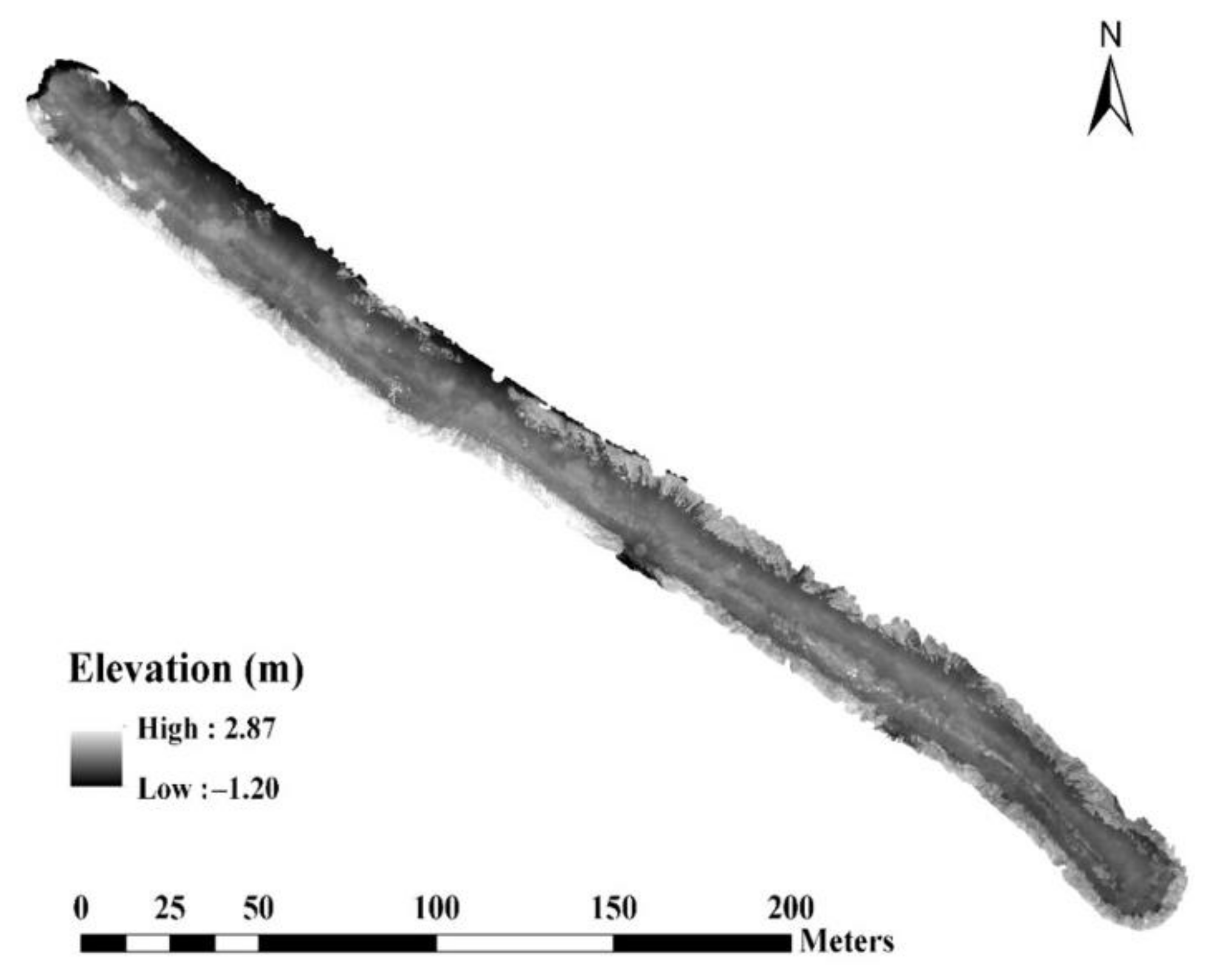
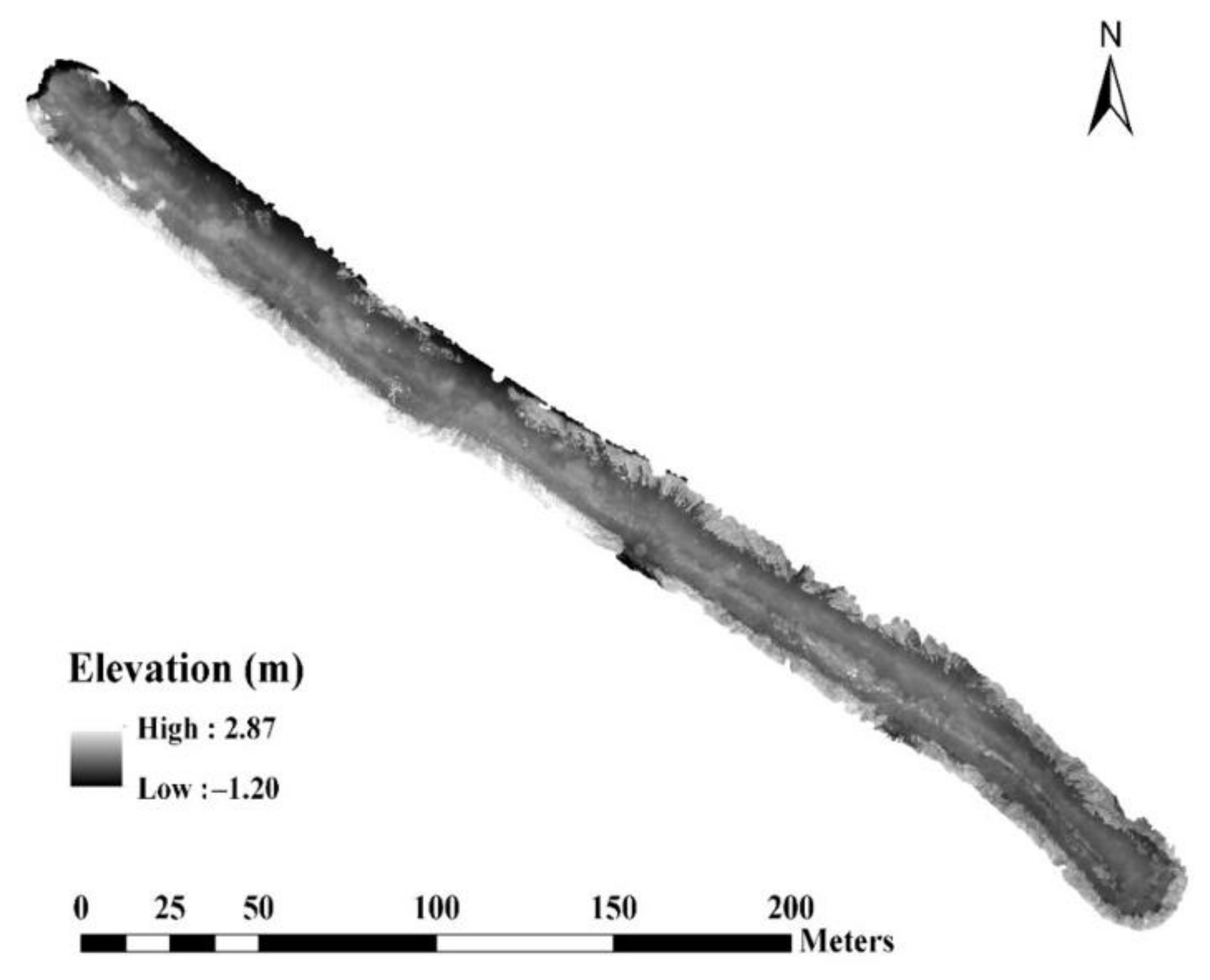
4.1. Initial DEM Generation and Accuracy Assessment
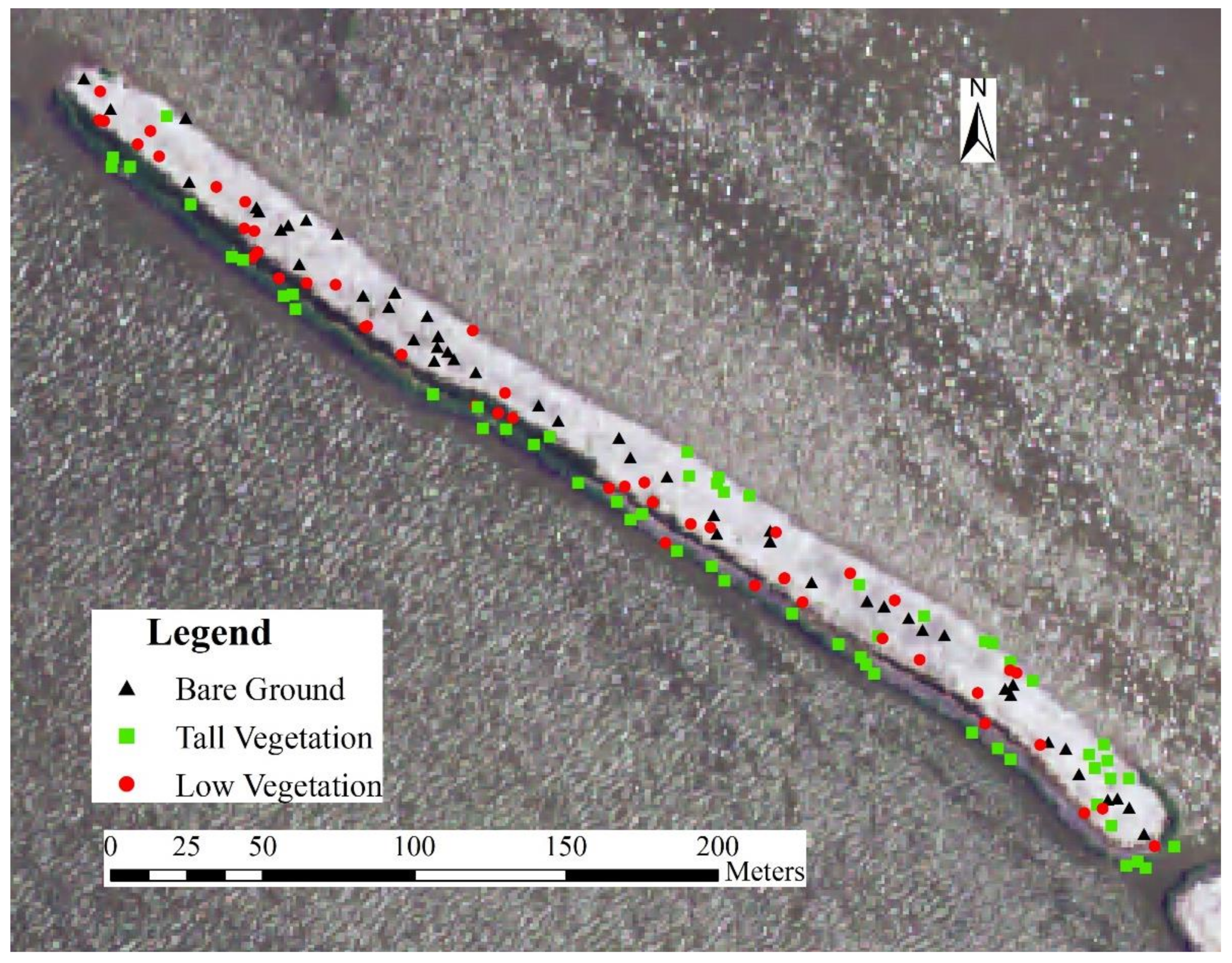
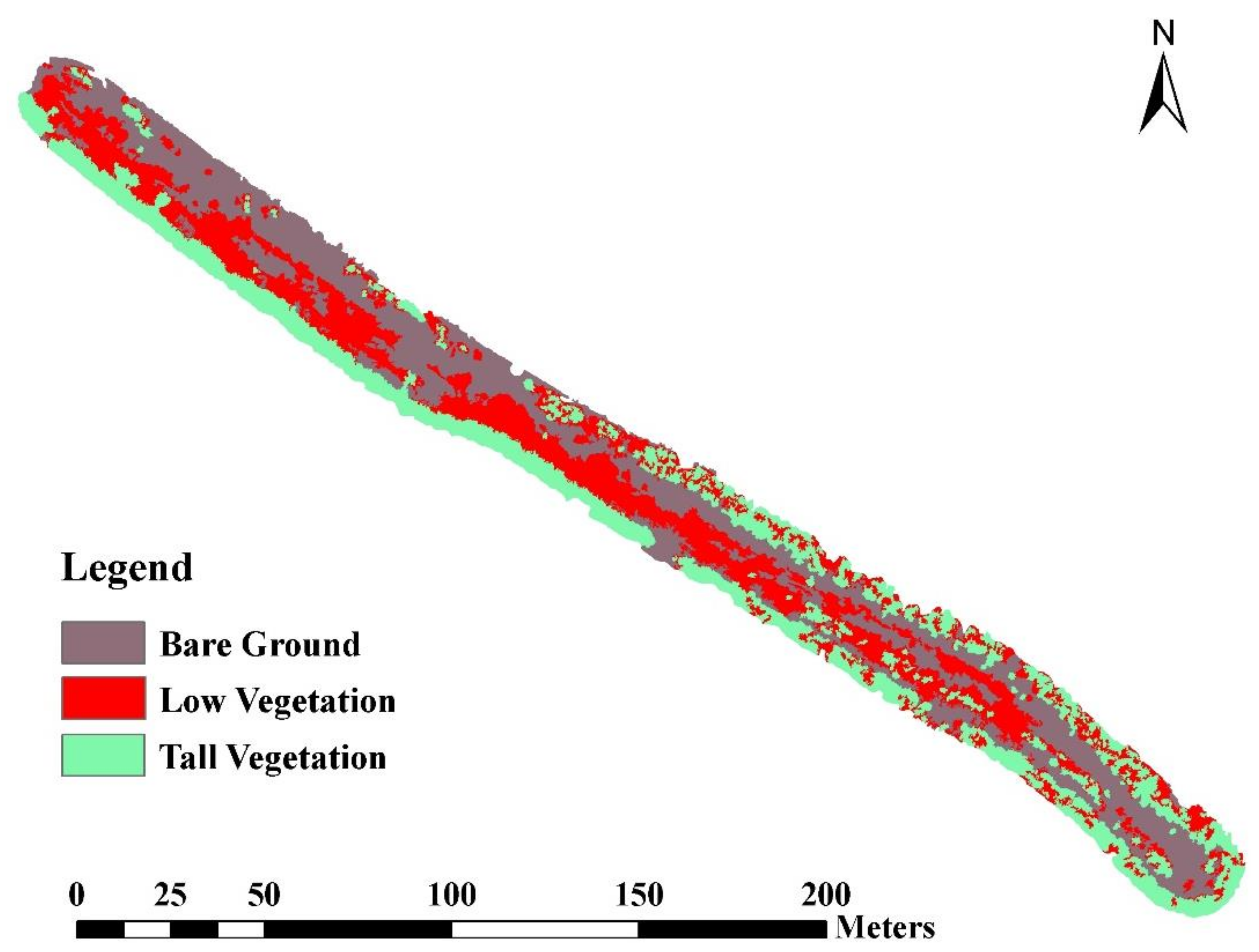
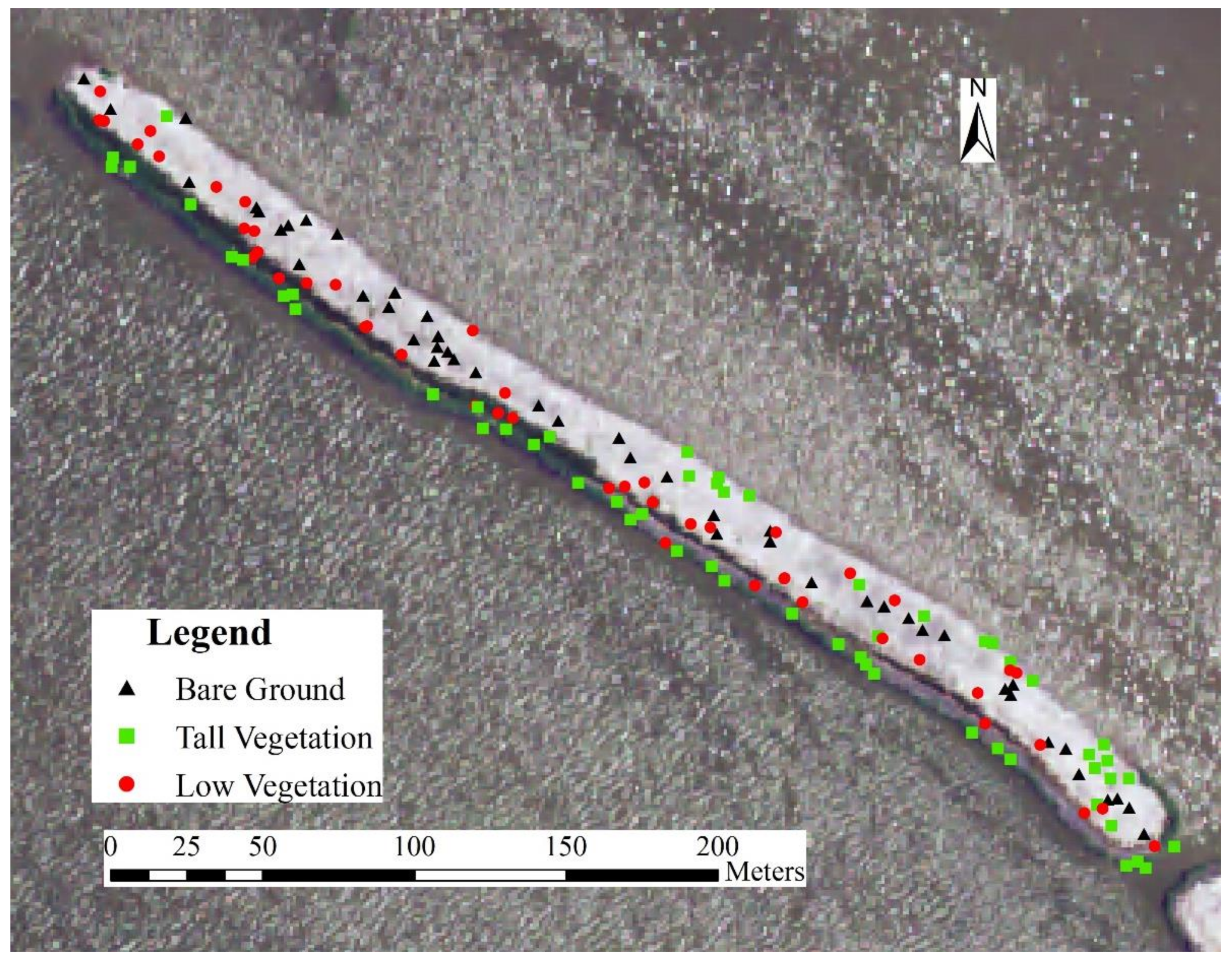
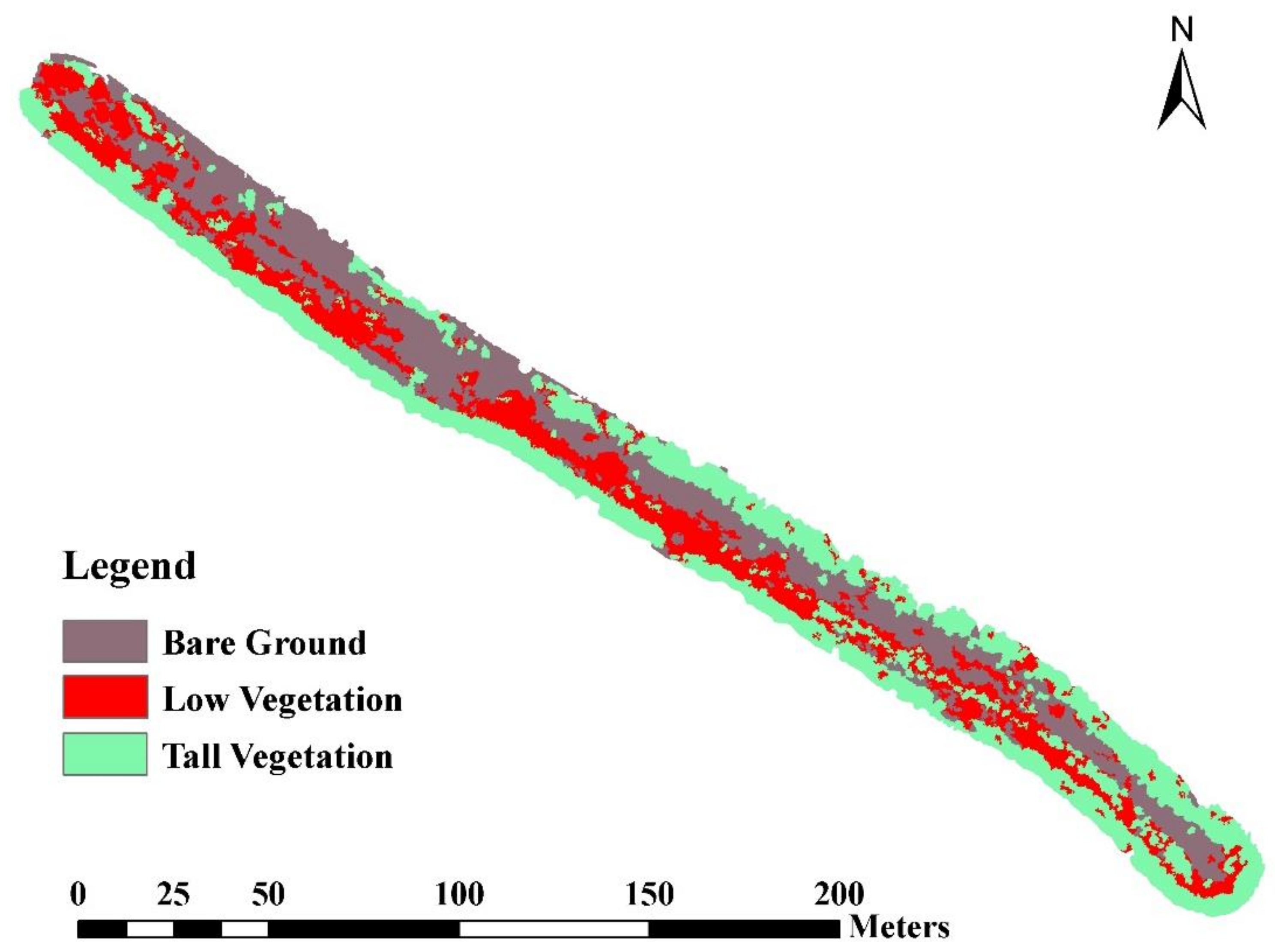
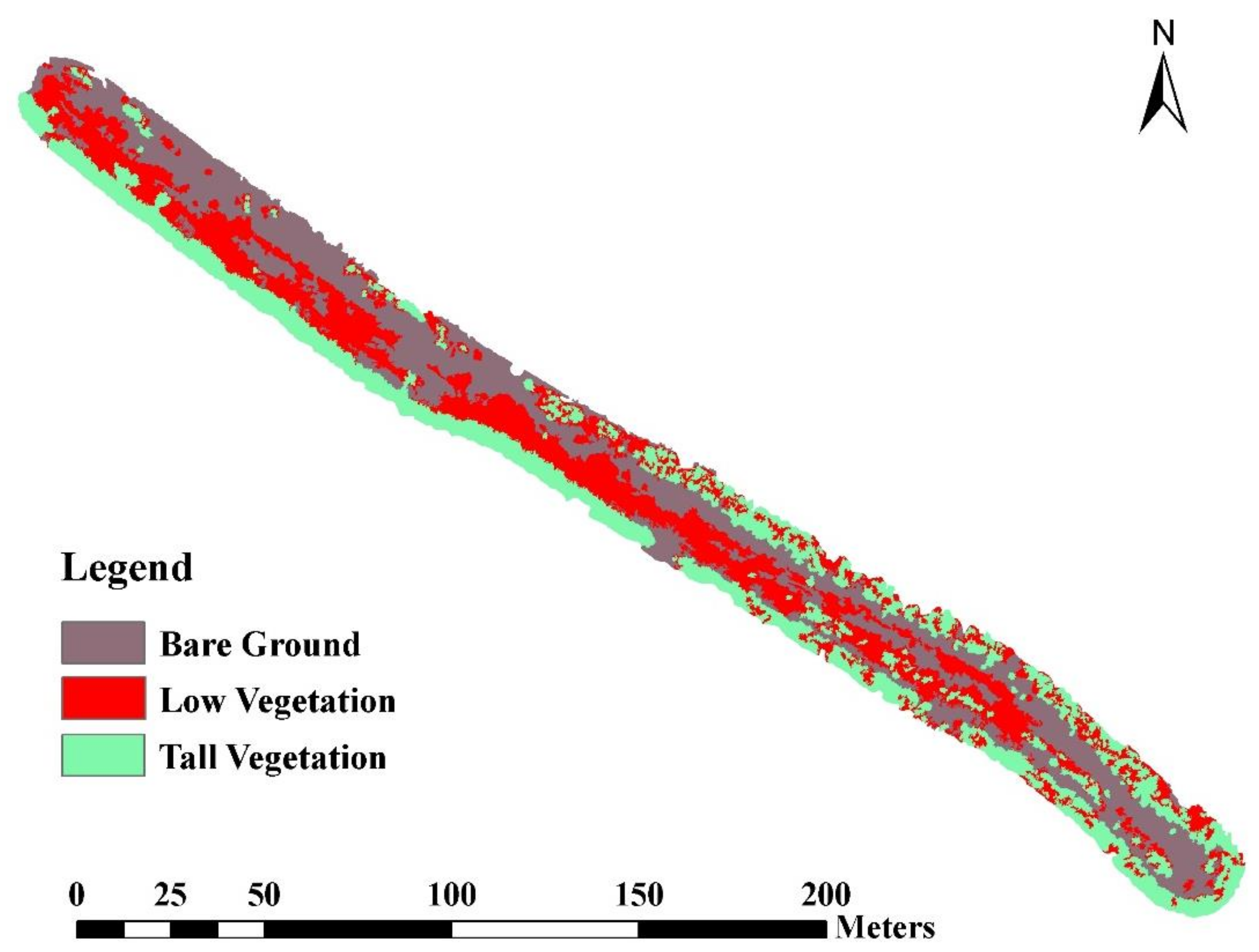
4.2. Land Cover Classification
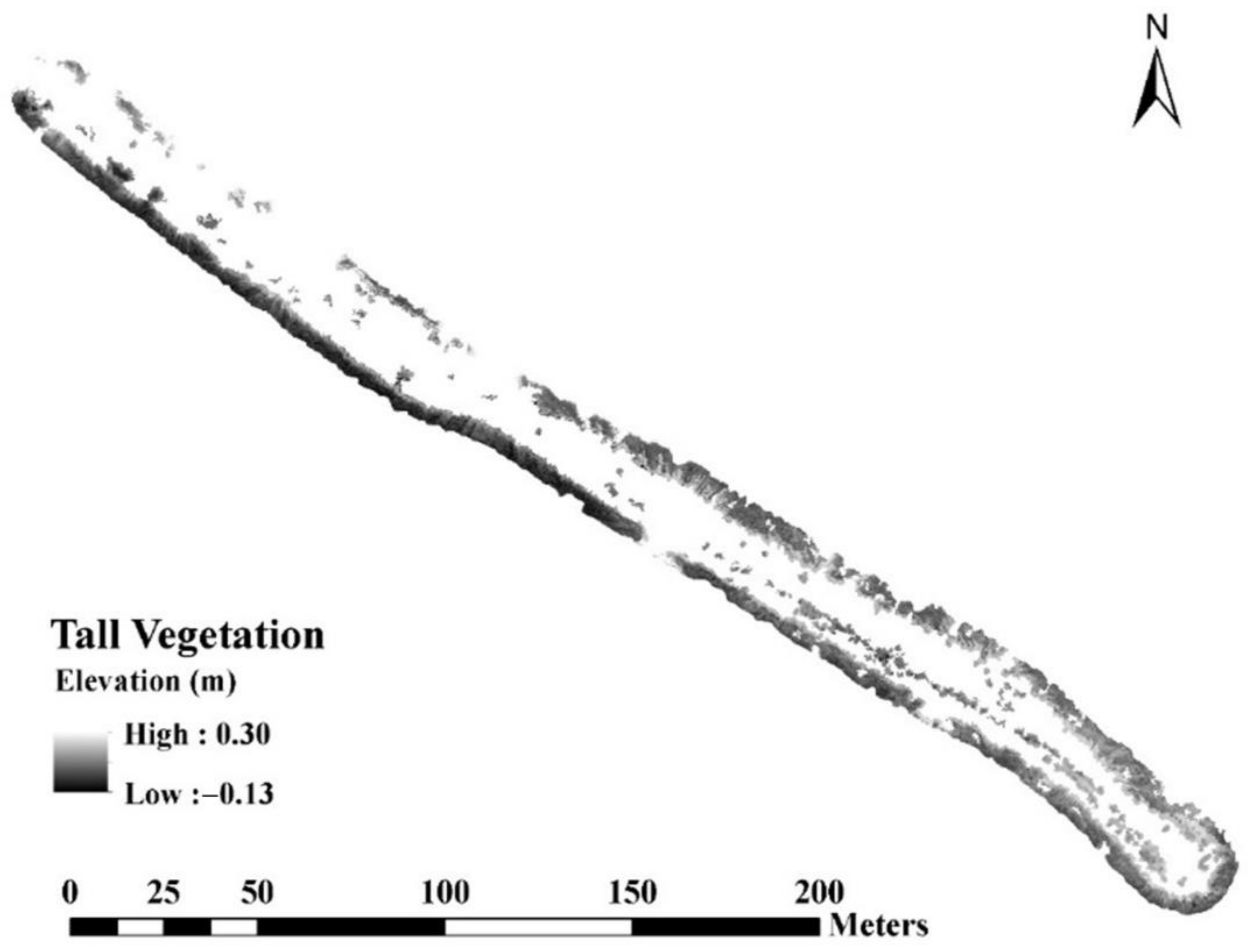
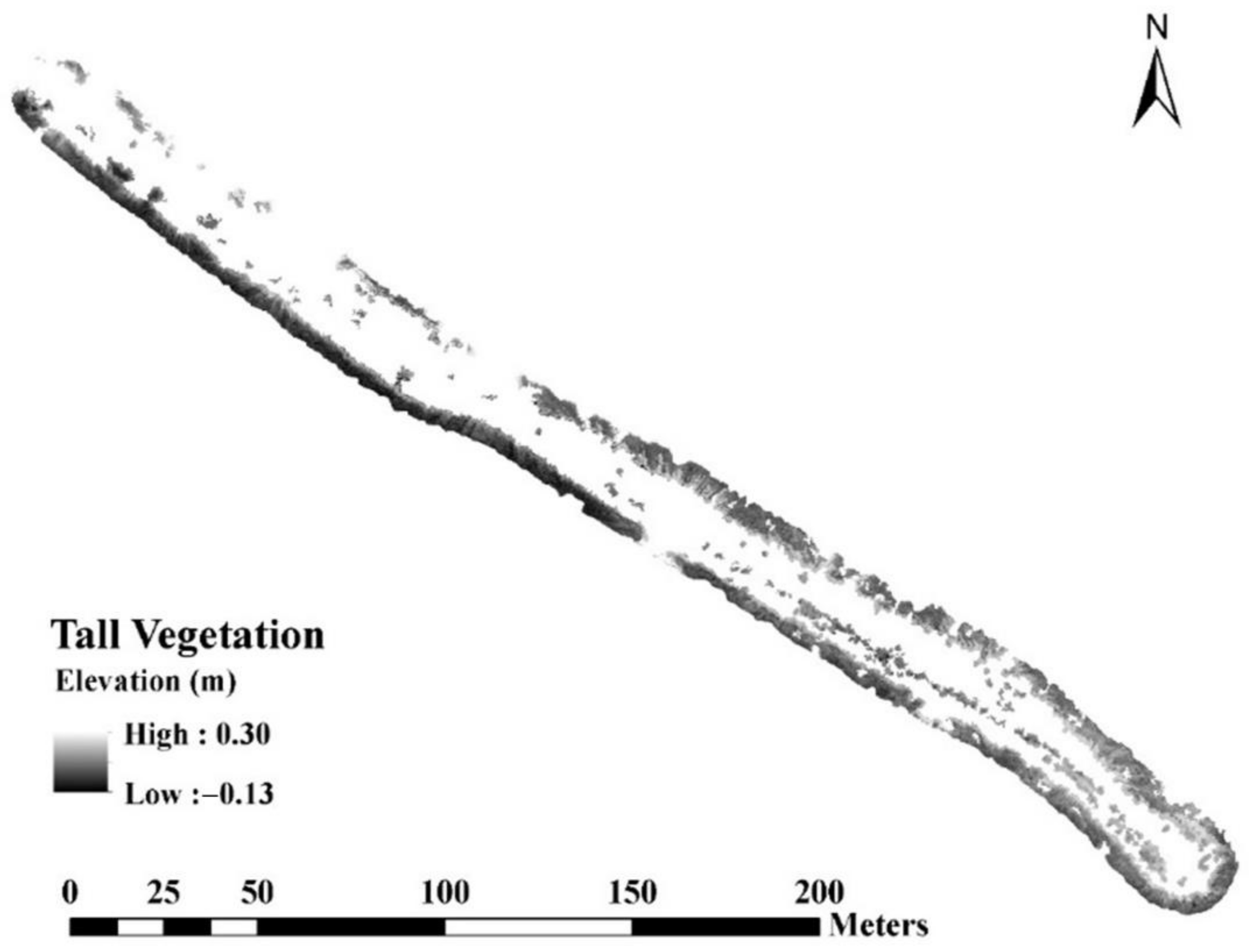
4.3. DEM Correction for Tall Vegetation
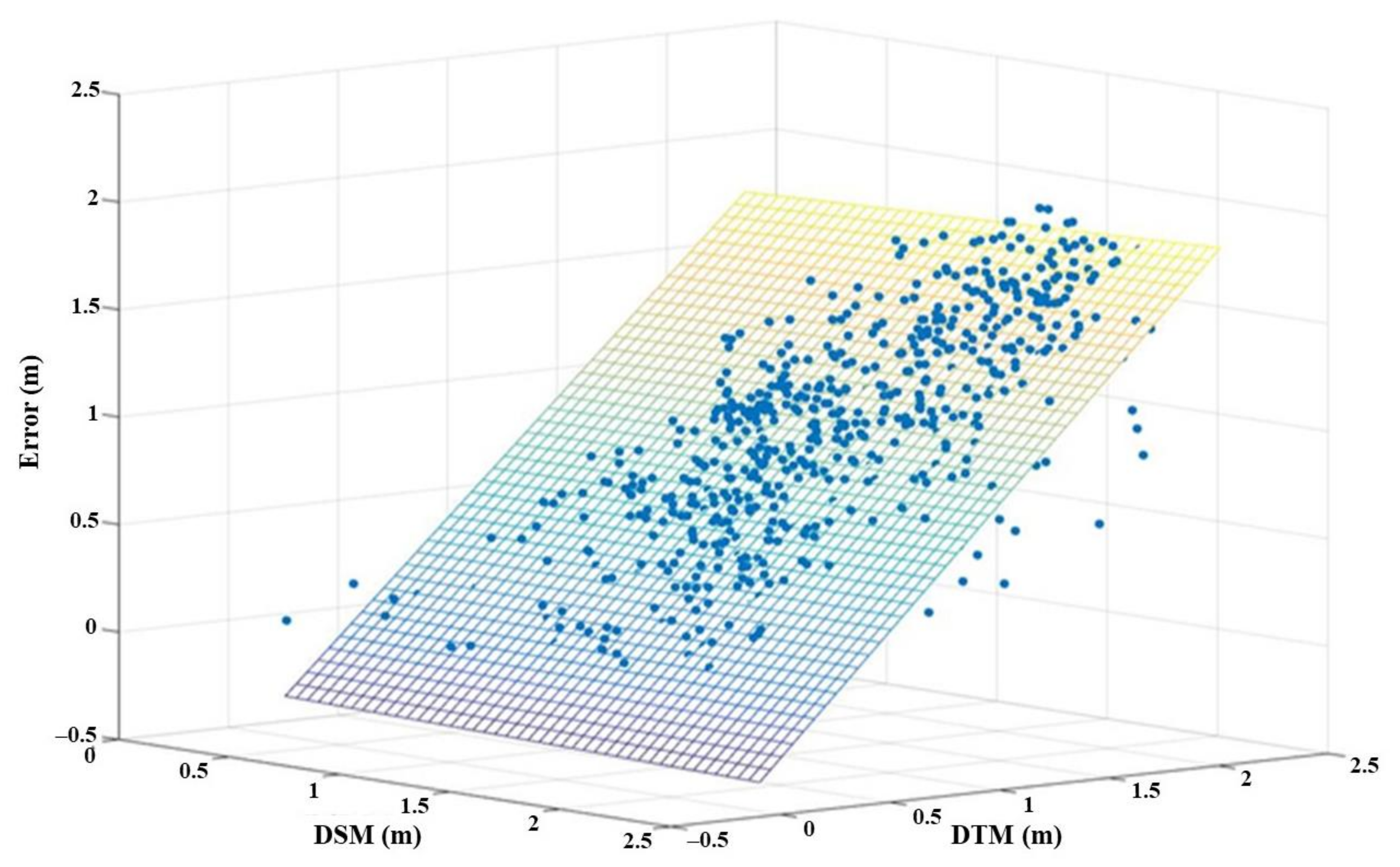
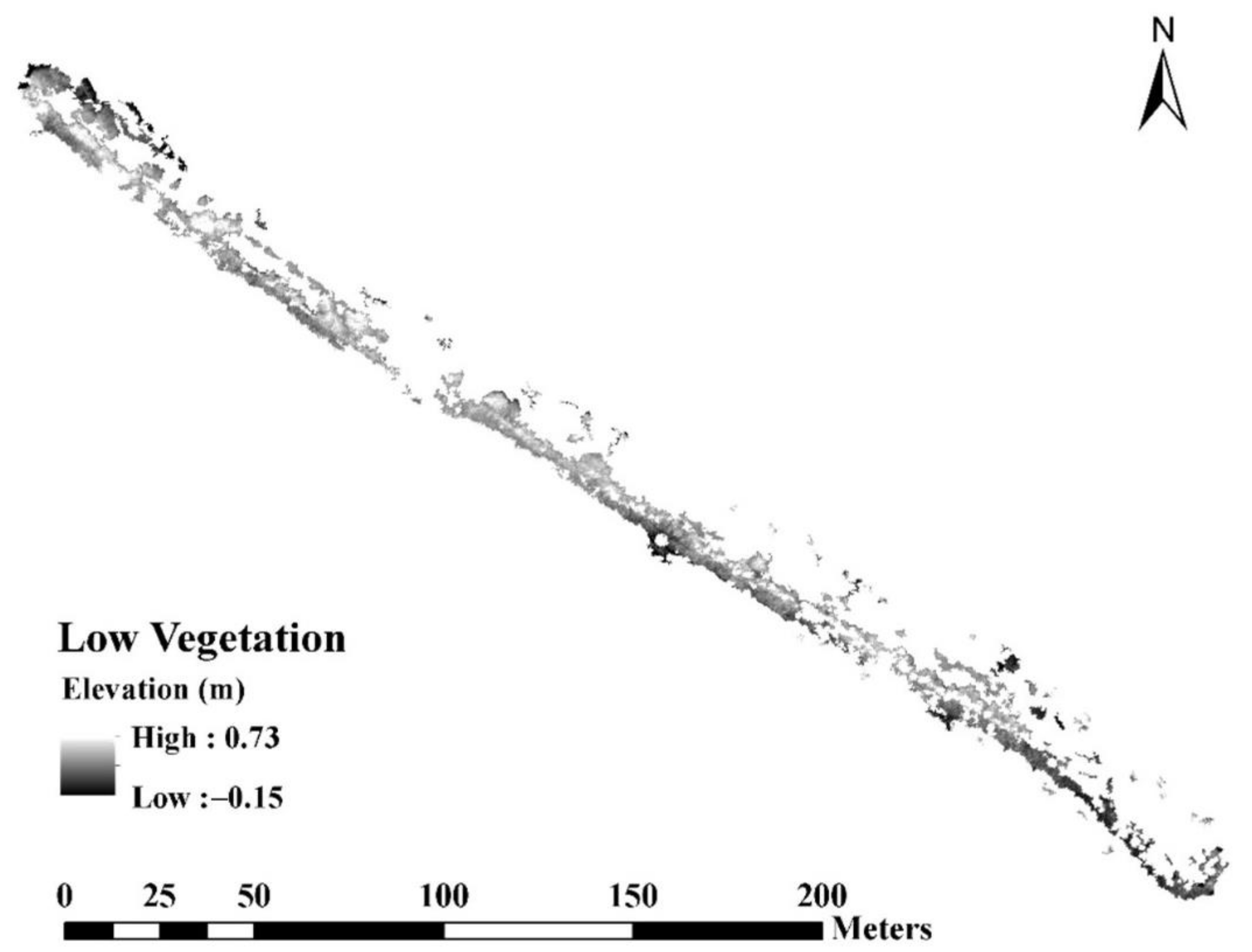
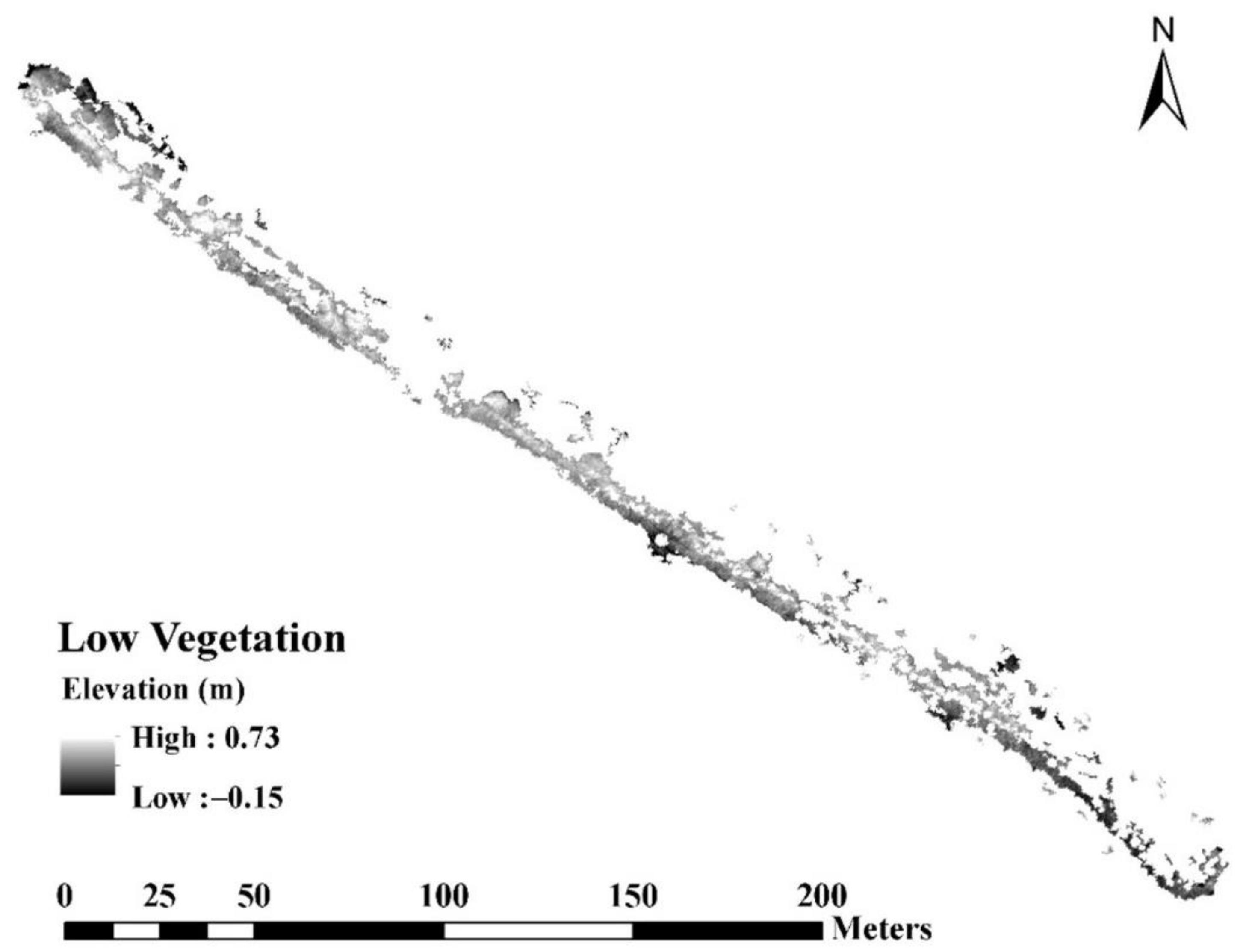
4.4. DEM Correction for Low Vegetation
4.5. Application of Existing Correction Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Almeida, L.P.; Almar, R.; Bergsma, E.W.; Berthier, E.; Baptista, P.; Garel, E.; Dada, O.A.; Alves, B. Deriving high spatial-resolution coastal topography from sub-meter satellite stereo imagery. Remote Sens. 2019, 11, 590. [Google Scholar] [CrossRef] [Green Version]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (uav) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Webster, T.L.; Forbes, D.L.; Dickie, S.; Shreenan, R. Using topographic lidar to map flood risk from storm-surge events for Charlottetown, Prince Edward Island, Canada. Can. J. Remote Sens. 2004, 30, 64–76. [Google Scholar] [CrossRef]
- Mentaschi, L.; Vousdoukas, M.I.; Pekel, J.-F.; Voukouvalas, E.; Feyen, L. Global long-term observations of coastal erosion and accretion. Sci. Rep. 2018, 8, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Masselink, G.; Pattiaratchi, C.B. Seasonal changes in beach morphology along the sheltered coastline of perth, western australia. Mar. Geol. 2001, 172, 243–263. [Google Scholar] [CrossRef]
- Dail, H.J.; Merrifield, M.A.; Bevis, M. Steep beach morphology changes due to energetic wave forcing. Mar. Geol. 2000, 162, 443–458. [Google Scholar] [CrossRef]
- Coops, H.; Geilen, N.; Verheij, H.J. Interactions between waves, bank erosion and emergent vegetation: An experimental study in a wave tank. Aquat. Bot. 1996, 53, 187–198. [Google Scholar] [CrossRef] [Green Version]
- Palmsten, M.L.; Holman, R.A. Laboratory investigation of dune erosion using stereo video. Coast. Eng. 2012, 60, 123–135. [Google Scholar] [CrossRef]
- Erikson, L.H.; Hanson, H. A method to extract wave tank data using video imagery and its comparison to conventional data collection techniques. Comput. Geosci. 2005, 31, 371–384. [Google Scholar] [CrossRef]
- Zhao, Q.; Bai, J.; Huang, L. A review of methodologies and success indicators for coastal wetland restoration. Ecol. Indic. 2016, 60, 442–452. [Google Scholar] [CrossRef]
- Jangir, B.; Satyanarayana, A.N.V.; Swati, S. Delineation of spatio-temporal changes of shoreline and geomorphological features of Odisha coast of India using remote sensing and GIS techniques. Nat. Hazards 2016, 82, 1437–1455. [Google Scholar] [CrossRef]
- Holland, K.T.; Puleo, J.A.; Kooney, T.N. Quantification of swash flows using video-based particle image velocimetry. Coast. Eng. 2001, 44, 65–77. [Google Scholar] [CrossRef]
- Dixon, T.H.; Amelung, F.; Ferretti, A. Space geodesy: Subsidence and flooding in New Orleans. Nature 2006, 441, 587–588. [Google Scholar] [CrossRef]
- Houser, C.; Hapke, C.; Hamilton, S. Controls on coastal dune morphology, shoreline erosion and barrier island response to extreme storms. Geomorphology 2008, 100, 223–240. [Google Scholar] [CrossRef]
- Hladik, C.; Alber, M. Accuracy assessment and correction of a LIDAR-derived salt marsh digital elevation model. Remote Sens. Environ. 2012, 121, 224–235. [Google Scholar] [CrossRef]
- Hladik, C.; Schalles, J.; Alber, M. Salt marsh elevation and habitat mapping using hyperspectral and lidar data. Remote Sens. Environ. 2013, 139, 318–330. [Google Scholar] [CrossRef]
- Su, J.; Bork, E. Influence of vegetation, slope, and lidar sampling angle on dem accuracy. Photogramm. Eng. Remote. Sens. 2006, 72, 1265–1274. [Google Scholar] [CrossRef]
- Heritage, G.; Hetherington, D. Towards a protocol for laser scanning in fluvial geomorphology. Earth Surf. Process. Landf. 2007, 32, 66–74. [Google Scholar] [CrossRef]
- Meng, X.L.; Wang, L.; Silvan-Cardenas, J.L. A multi-directional ground filtering algorithm for airborne LIDAR. ISPRS J. Photogramm. Remote Sens. 2009, 64, 117–124. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.L.; Currit, N.; Zhao, K.G. Ground Filtering Algorithms for Airborne LiDAR Data: A Review of Critical Issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef] [Green Version]
- Hebeler, F.; Purves, R.S. The influence of elevation uncertainty on derivation of topographic indices. Geomorphology 2009, 111, 4–16. [Google Scholar] [CrossRef] [Green Version]
- Hutton, C.; Brazier, R. Quantifying riparian zone structure from airborne lidar: Vegetation filtering, anisotropic interpolation, and uncertainty propagation. J. Hydrol. 2012, 442–443, 36–45. [Google Scholar] [CrossRef]
- Chen, Q.; Vaglio Laurin, G.; Valentini, R. Uncertainty of remotely sensed aboveground biomass over an african tropical forest: Propagating errors from trees to plots to pixels. Remote Sens. Environ. 2015, 160, 134–143. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Hall, R.J. The uncertainty in conifer plantation growth prediction from multi-temporal lidar datasets. Remote Sens. Environ. 2008, 112, 1168–1180. [Google Scholar] [CrossRef]
- Mascaro, J.; Detto, M.; Asner, G.P. Evaluating uncertainty in mapping forest carbon with airborne LiDAR. Remote Sens. Environ. 2011, 115, 3770–3774. [Google Scholar] [CrossRef]
- Meng, X.; Zhang, X.; Silva, R.; Li, C.; Wang, L. Impact of high-resolution topographic mapping on beach morphological analyses based on terrestrial LiDAR and object-oriented beach evolution. ISPRS Int. J. Geo-Inf. 2017, 6, 147. [Google Scholar] [CrossRef]
- Moser, K.; Ahn, C.; Noe, G. Characterization of microtopography and its influence on vegetation patterns in created wetlands. Wetlands 2007, 27, 1081–1097. [Google Scholar] [CrossRef]
- Moser, K.F.; Ahn, C.; Noe, G.B. The Influence of Microtopography on Soil Nutrients in Created Mitigation Wetlands. Restor. Ecol. 2009, 17, 641–651. [Google Scholar] [CrossRef]
- Pollock, M.M.; Naiman, R.J.; Hanley, T.A. Plant species richness in riparian wetlands—A test of biodiversity theory. Ecology 1998, 79, 94–105. [Google Scholar]
- Karstens, S.; Jurasinski, G.; Glatzel, S.; Buczko, U. Dynamics of surface elevation and microtopography in different zones of a coastal phragmites wetland. Ecol. Eng. 2016, 94, 152–163. [Google Scholar] [CrossRef]
- Coveney, S.; Fotheringham, A.S. Terrestrial laser scan error in the presence of dense ground vegetation. Photogramm. Rec. 2011, 26, 307–324. [Google Scholar] [CrossRef] [Green Version]
- Fan, L. Uncertainty in Terrestrial Laser Scanning for Measuring Surface Movements at a Local Scale; University of Southampton: Southampton, UK, 2014. [Google Scholar]
- Guarnieri, A.; Vettore, A.; Pirotti, F. Retrieval of small-relief marsh morphology from Terrestrial Laser Scanner, optimal spatial filtering, and laser return intensity. Geomorphology 2009, 113, 12–20. [Google Scholar] [CrossRef]
- Rodriguez-Caballero, E.; Afana, A.; Chamizo, S.; Sole-Benet, A.; Canton, Y. A new adaptive method to filter terrestrial laser scanner point clouds using morphological filters and spectral information to conserve surface micro-topography. ISPRS J. Photogramm. 2016, 117, 141–148. [Google Scholar] [CrossRef]
- Che, E.Z.; Olsen, M.J. Fast ground filtering for TLS data via Scanline Density Analysis. ISPRS J. Photogramm. Remote Sens. 2017, 129, 226–240. [Google Scholar] [CrossRef]
- Theriot, J.P. American Energy, Imperiled Coast: Oil and Gas Development in Louisiana’s Wetlands; Louisiana State University Press: Baton Rouge, LA, USA, 2014. [Google Scholar]
- Morton, R.A.; Bernier, J.C.; Barras, J.A. Evidence of regional subsidence and associated interior wetland loss induced by hydrocarbon production, Gulf Coast region, USA. Environ. Geol. 2006, 50, 261–274. [Google Scholar] [CrossRef]
- Zhao, K.G.; Garcia, M.; Liu, S.; Guo, Q.H.; Chen, G.; Zhang, X.S.; Zhou, Y.Y.; Meng, X.L. Terrestrial lidar remote sensing of forests: Maximum likelihood estimates of canopy profile, leaf area index, and leaf angle distribution. Agric. For. Meteorol. 2015, 209, 100–113. [Google Scholar] [CrossRef]
- Meng, X.L.; Currit, N.; Wang, L.; Yang, X.J. Detect residential buildings from lidar and aerial photographs through object-oriented land-use classification. Photogramm. Eng. Rem. Sens. 2012, 78, 35–44. [Google Scholar] [CrossRef]
- Bindzarova Gergelova, M.; Labant, S.; Mizak, J.; Sustek, P.; Leicher, L. Inventory of Locations of Old Mining Works Using LiDAR Data: A Case Study in Slovakia. Sustainability 2021, 13, 6981. [Google Scholar] [CrossRef]
- Li, L.; Nearing, M.A.; Nichols, M.H.; Polyakov, V.O.; Guertin, D.P.; Cavanaugh, M.L. The effects of DEM interpolation on quantifying soil surface roughness using terrestrial LiDAR. Soil Tillage Res. 2020, 198, 104520. [Google Scholar] [CrossRef]
- Cățeanu, M.; Ciubotaru, A. The effect of lidar sampling density on DTM accuracy for areas with heavy forest cover. Forests 2021, 12, 265. [Google Scholar] [CrossRef]
- Langridge, R.M.; Ries, W.F.; Farrier, T.; Barth, N.C.; Khajavi, N.; De Pascale, G.P. Developing sub 5-m LiDAR DEMs for forested sections of the Alpine and Hope faults, South Island, New Zealand: Implications for structural interpretations. J. Struct. Geol. 2014, 64, 53–66. [Google Scholar] [CrossRef]
- Shi, W.; Deng, S.; Xu, W. Extraction of multi-scale landslide morphological features based on local Gi* using airborne LiDAR-derived DEM. Geomorphology 2018, 303, 229–242. [Google Scholar] [CrossRef]
- McClure, A.; Liu, X.H.; Hines, E.; Ferner, M.C. Evaluation of error reduction techniques on a lidar-derived salt marsh digital elevation model. J Coast. Res 2016, 32, 424–433. [Google Scholar]
- Gao, Y.; Mas, J.F.; Maathuis, B.H.P.; Zhang, X.M.; Van Dijk, P.M. Comparison of pixel-based and object-oriented image classification approaches—A case study in a coal fire area, wuda, inner mongolia, china. Int. J. Remote Sens. 2006, 27, 4039–4055. [Google Scholar]
- Yu, Q.; Gong, P.; Clinton, N.; Biging, G.; Kelly, M.; Schirokauer, D. Object-based detailed vegetation classification. With airborne high spatial resolution remote sensing imagery. Photogramm. Eng. Rem. Sens. 2006, 72, 799–811. [Google Scholar] [CrossRef] [Green Version]
- Platt, R.V.; Rapoza, L. An evaluation of an object-oriented paradigm for land use/land cover classification. Prof. Geogr. 2008, 60, 87–100. [Google Scholar] [CrossRef]
- Myint, S.W.; Gober, P.; Brazel, A. Per-pixel vs. object-based classification of urban land cover extraction using high spatial resolution imagery. Remote Sens. Environ. 2011, 115, 1145–1161. [Google Scholar] [CrossRef]
- Duro, D.C.; Franklin, S.E.; Dube, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using spot-5 hrg imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Liu, Q.J.; Jing, L.H.; Wang, M.F.; Lin, Q.Z. Hyperspectral remote sensing image classification based on svm optimized by clonal selection. Spectrosc. Spect. Anal. 2013, 33, 746–751. [Google Scholar]
- Niu, X.; Ban, Y.F. Multi-temporal radarsat-2 polarimetric sar data for urban land-cover classification using an object-based support vector machine and a rule-based approach. Int. J. Remote Sens. 2013, 34, 1–26. [Google Scholar] [CrossRef]
- Pal, M.; Mather, P.M. Support vector machines for classification in remote sensing. Int. J. Remote Sens. 2005, 26, 1007–1011. [Google Scholar] [CrossRef]
- Zhang, C.Y.; Xie, Z.X. Data fusion and classifier ensemble techniques for vegetation mapping in the coastal everglades. Geocarto Int. 2014, 29, 228–243. [Google Scholar] [CrossRef]
- Fan, L.; Powrie, W.; Smethurst, J.; Atkinson, P.M.; Einstein, H. The effect of short ground vegetation on terrestrial laser scans at a local scale. ISPRS J. Photogramm. 2014, 95, 42–52. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.; Shang, N.; Zhang, X.; Li, C.; Zhao, K.; Qiu, X.; Weeks, E. Photogrammetric UAV mapping of terrain under dense coastal vegetation: An object-oriented classification ensemble algorithm for classification and terrain correction. Remote Sens. 2017, 9, 1187. [Google Scholar] [CrossRef] [Green Version]
- Milan, D.J.; Heritage, G.L.; Large, A.R.; Fuller, I.C. Filtering spatial error from DEMs: Implications for morphological change estimation. Geomorphology 2011, 125, 160–171. [Google Scholar] [CrossRef]
- Cooper, H.M.; Zhang, C.; Davis, S.E.; Troxler, T.G. Object-based correction of LiDAR DEMs using RTK-GPS data and machine learning modeling in the coastal Everglades. Environ. Model. Softw. 2019, 112, 179–191. [Google Scholar] [CrossRef]
- Streutker, D.R.; Glenn, N.F. LiDAR measurement of sagebrush steppe vegetation heights. Remote Sens. Environ. 2006, 102, 135–145. [Google Scholar] [CrossRef]
- Wang, C.; Menenti, M.; Stoll, M.P.; Feola, A.; Belluco, E.; Marani, M. Separation of ground and low vegetation signatures in lidar measurements of salt-marsh environments. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2014–2023. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Iterations | Raster Width (m) | Distance Threshold (m) |
|---|---|---|
| 1 | 10 | 15 |
| 2 | 5 | 7 |
| 3 | 2.5 | 3 |
| 4 | 0.75 | 0.5 |
| 5 | 0.5 | 0.1 |
| Land Cover | Minimum (m) | Maximum (m) | Mean (m) | Standard Deviation (m) |
|---|---|---|---|---|
| Bare ground | −0.067 | 0.091 | −0.003 | 0.023 |
| Low vegetation | −0.050 | 0.573 | 0.377 | 0.125 |
| Tall vegetation | 0.043 | 1.783 | 0.993 | 0.397 |
| Correction Factor | MBE (m) | RMSE(m) |
|---|---|---|
| Mean Error | 0.12 | 0.19 |
| 75th Percentile Error | 0.10 | 0.17 |
| 95th Percentile Error | −0.06 | 0.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Meng, X.; Li, C.; Shang, N.; Wang, J.; Xu, Y.; Wu, T.; Mugnier, C. Micro-Topography Mapping through Terrestrial LiDAR in Densely Vegetated Coastal Environments. ISPRS Int. J. Geo-Inf. 2021, 10, 665. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10100665
Zhang X, Meng X, Li C, Shang N, Wang J, Xu Y, Wu T, Mugnier C. Micro-Topography Mapping through Terrestrial LiDAR in Densely Vegetated Coastal Environments. ISPRS International Journal of Geo-Information. 2021; 10(10):665. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10100665
Chicago/Turabian StyleZhang, Xukai, Xuelian Meng, Chunyan Li, Nan Shang, Jiaze Wang, Yaping Xu, Tao Wu, and Cliff Mugnier. 2021. "Micro-Topography Mapping through Terrestrial LiDAR in Densely Vegetated Coastal Environments" ISPRS International Journal of Geo-Information 10, no. 10: 665. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10100665