
Near Real-Time Semantic View Analysis of 3D City Models in Web Browser

 , , , and
, , , and
Abstract
:1. Introduction
1.1. 3D City Model Encoding Format CityJSON
1.2. View Analysis in Urban Environments
1.3. Research Aims
2. Related Studies
2.1. Real Estate Valuation and Infill Development
2.2. Green View Index (GVI) on the Street Level
3. Materials and Methods
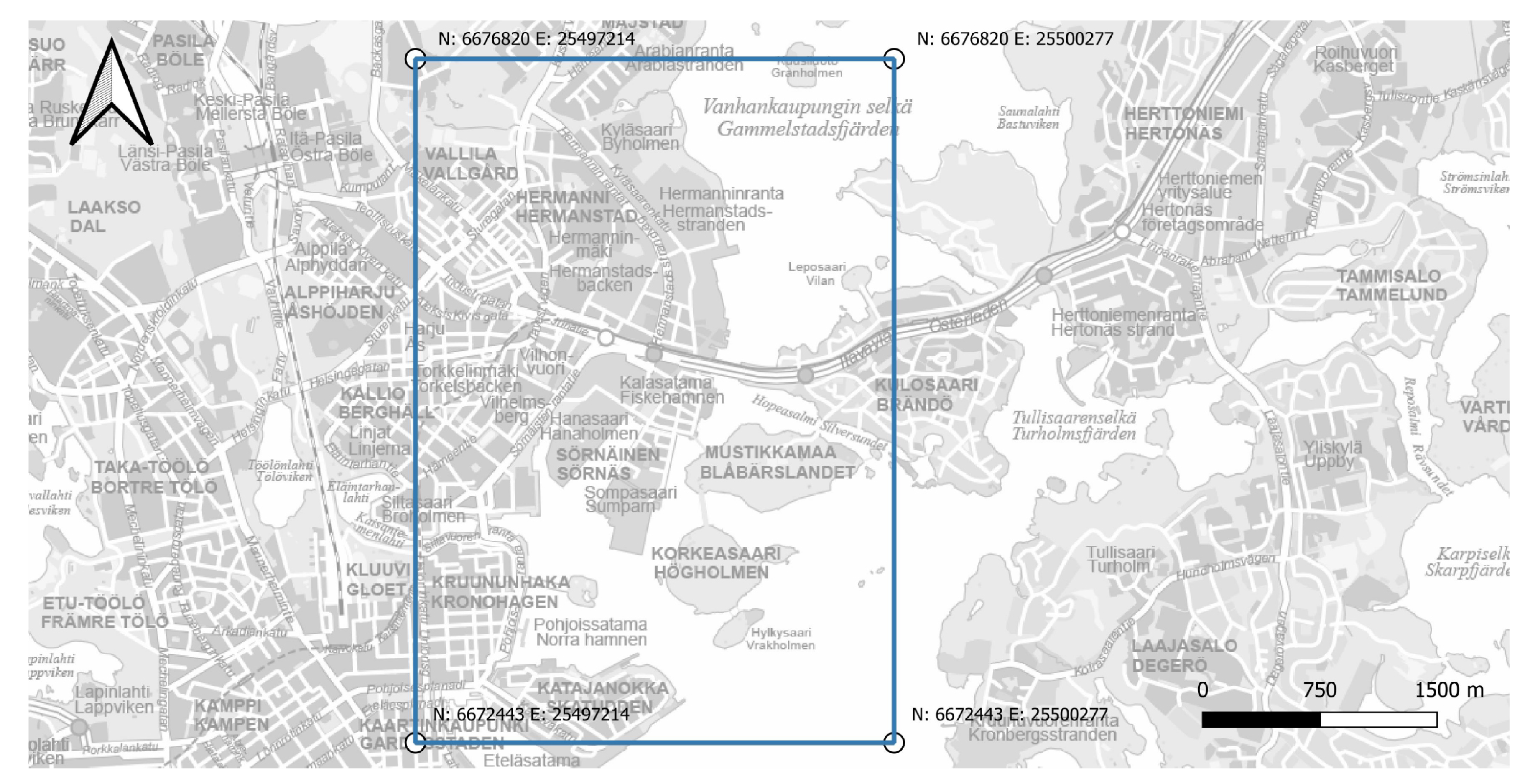
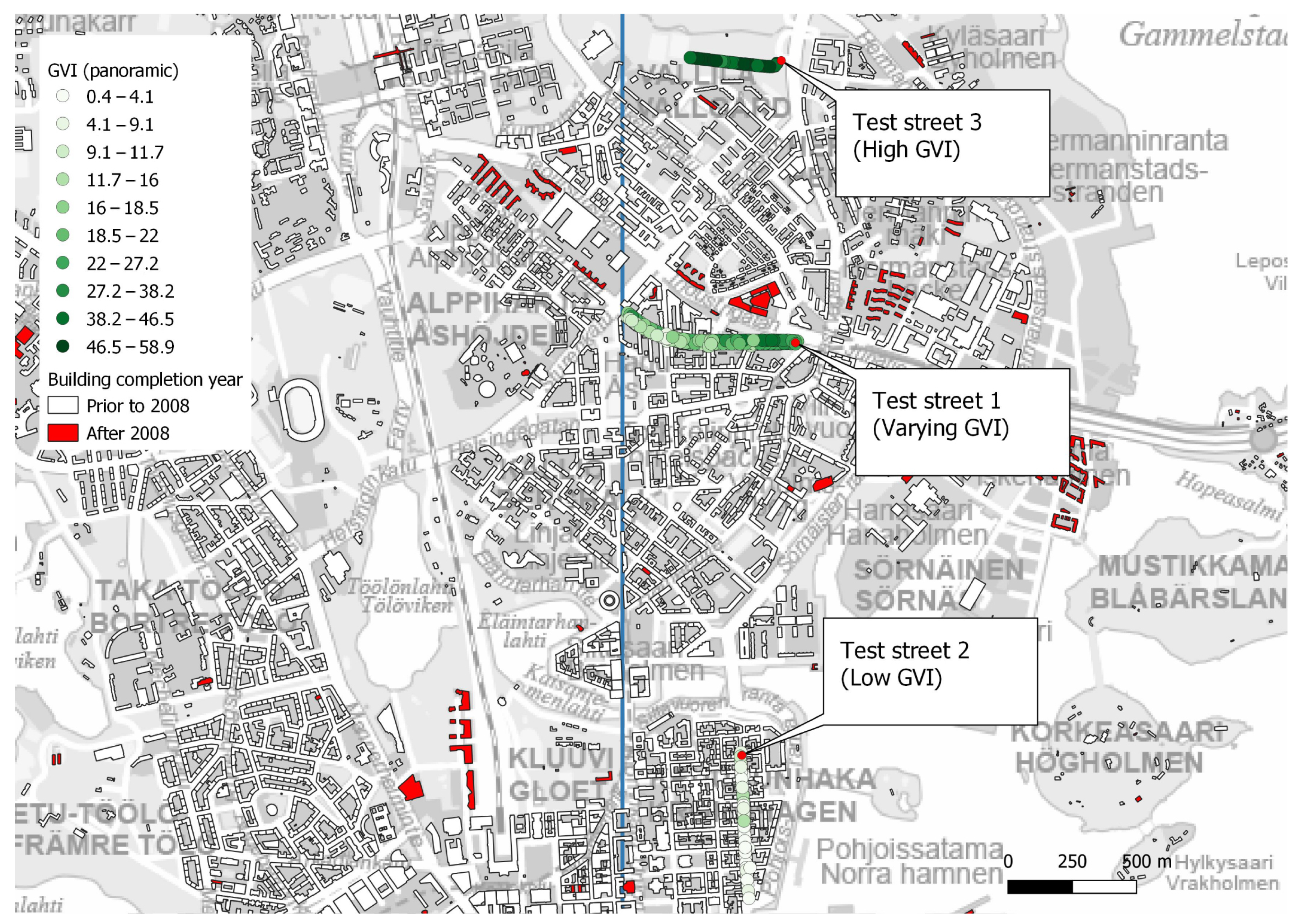
3.1. Test Site
3.2. Datasets
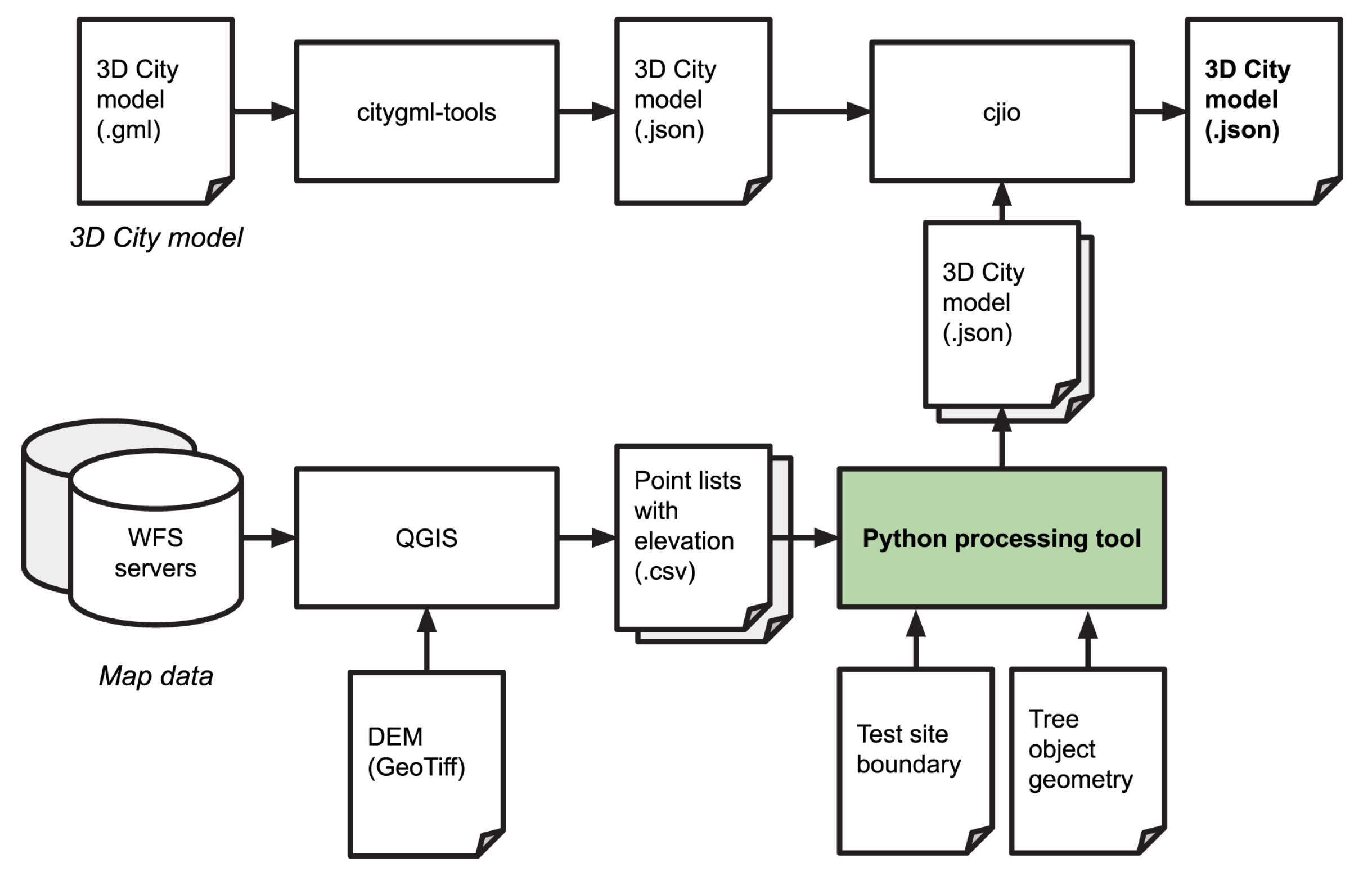
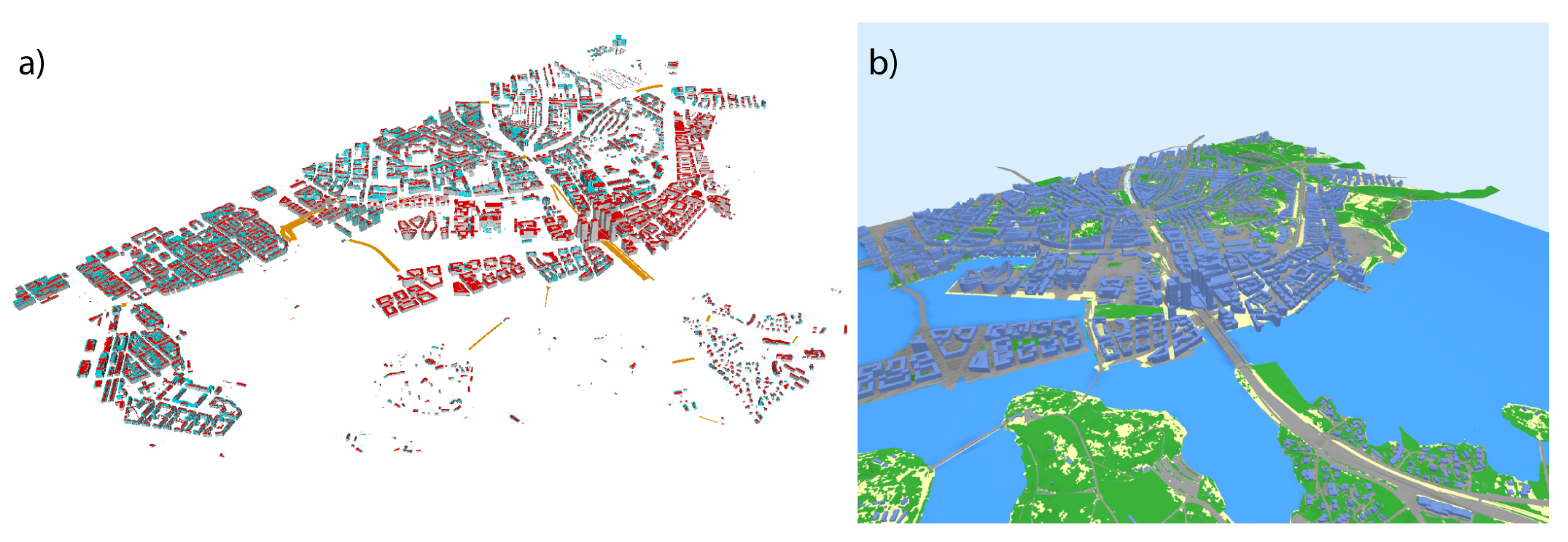
3.3. CityJSON Data Integration Pipeline
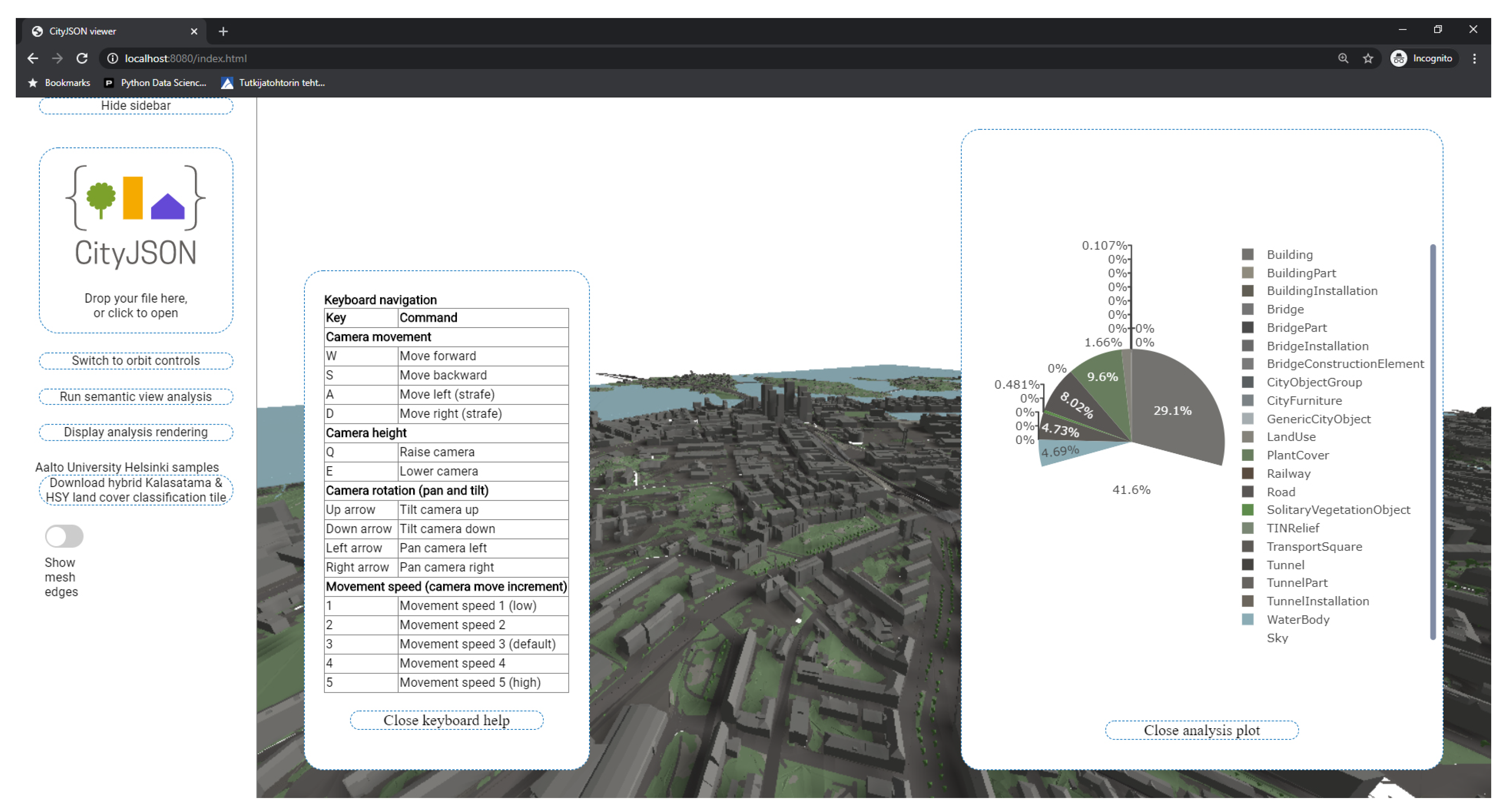
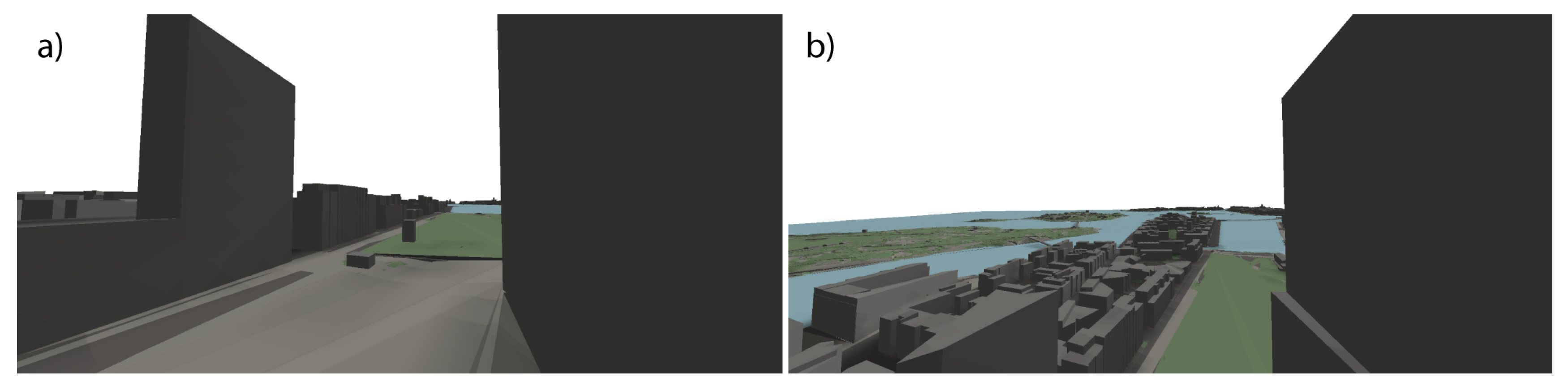
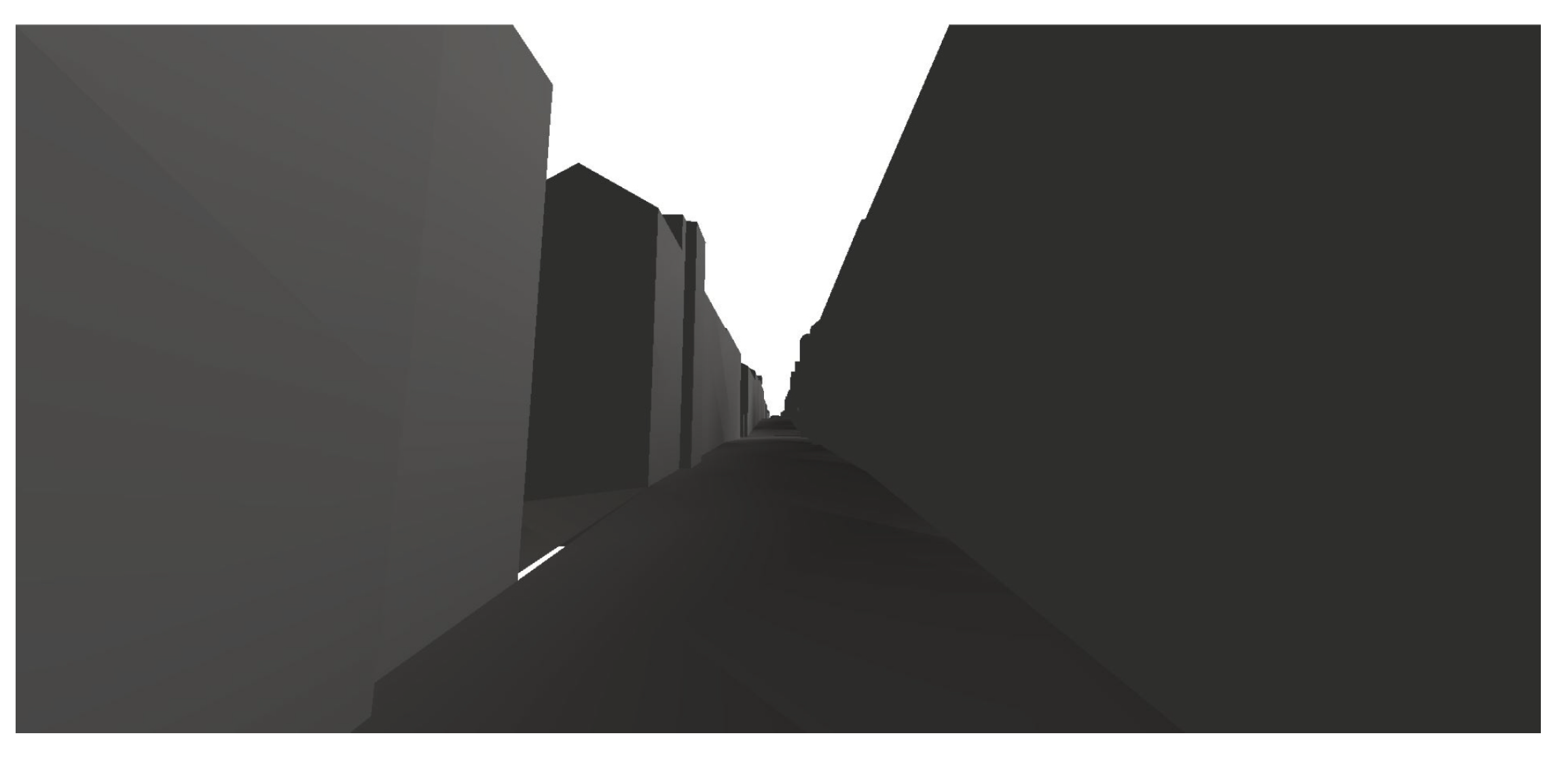
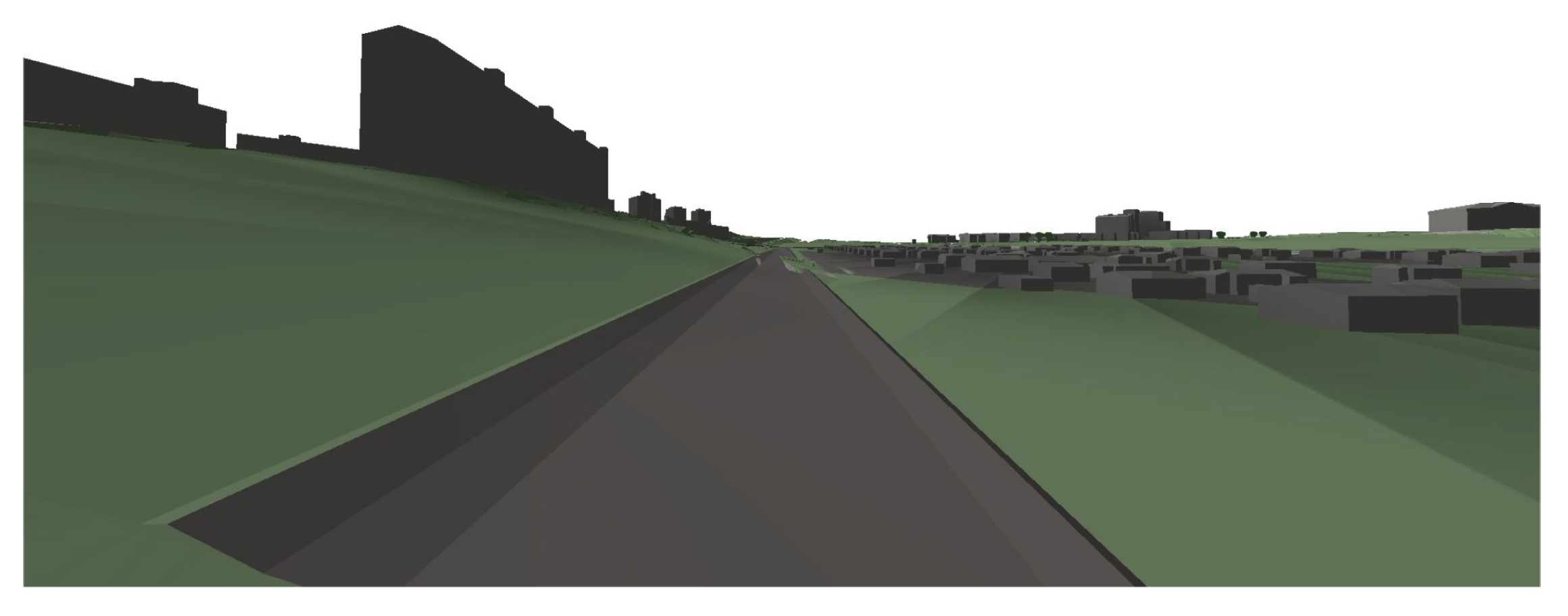
3.4. Semantic View Analysis in Browser
- Interrupt conventional rendering loop;
- Remove directional-, spot- and point lights, set ambient light to 100% intensity;
- Render individual frame.
- Obtain rendered frame as 2D array of pixel values
- Compute pixel counts for semantic view analysis categories
- Plot output (optional), log result to browser console (in CSV syntax)
- Restore shadows & other light sources, set ambient light to original intensity
- Render frame, display to user
- Resume normal rendering loop
3.5. Experiments
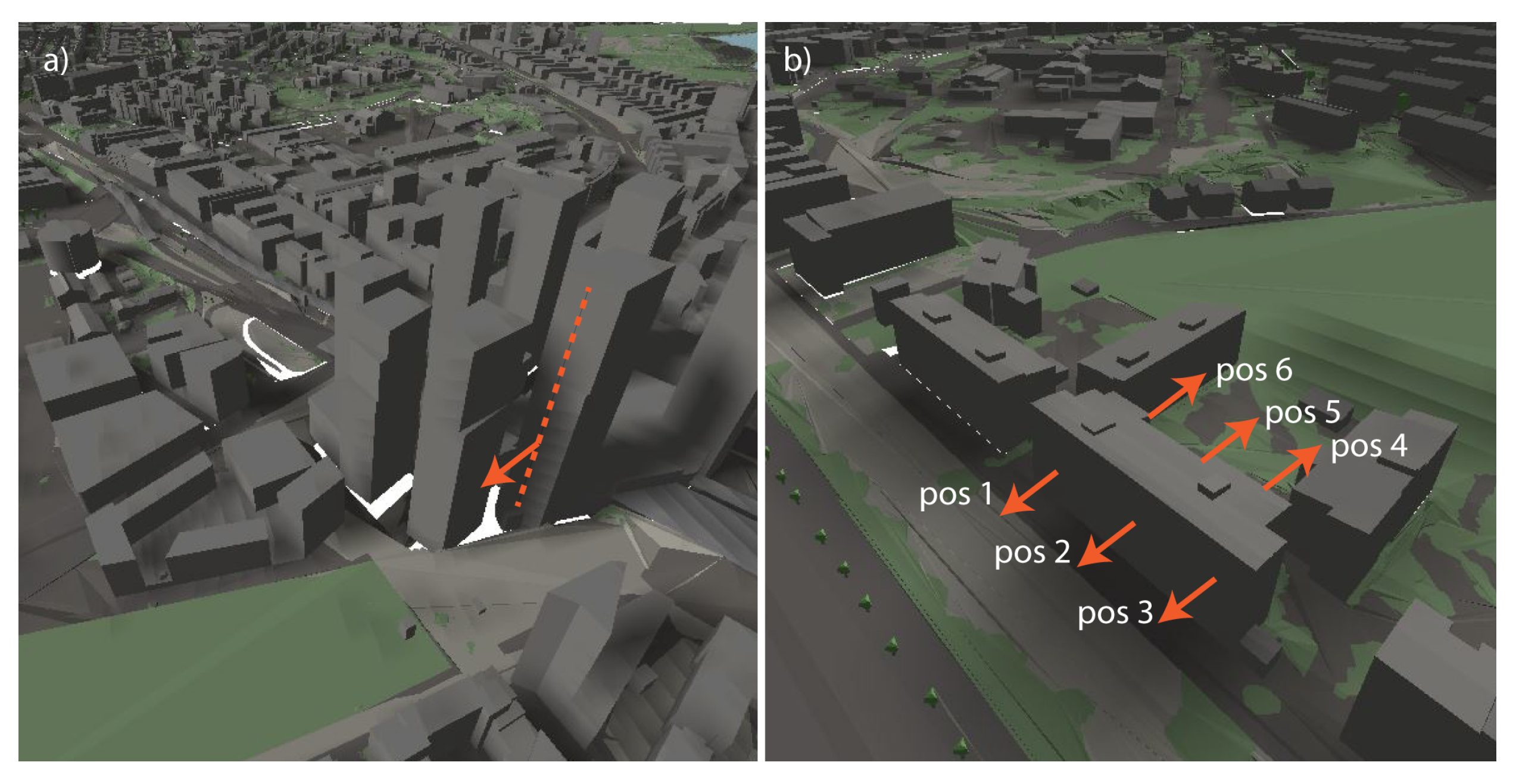
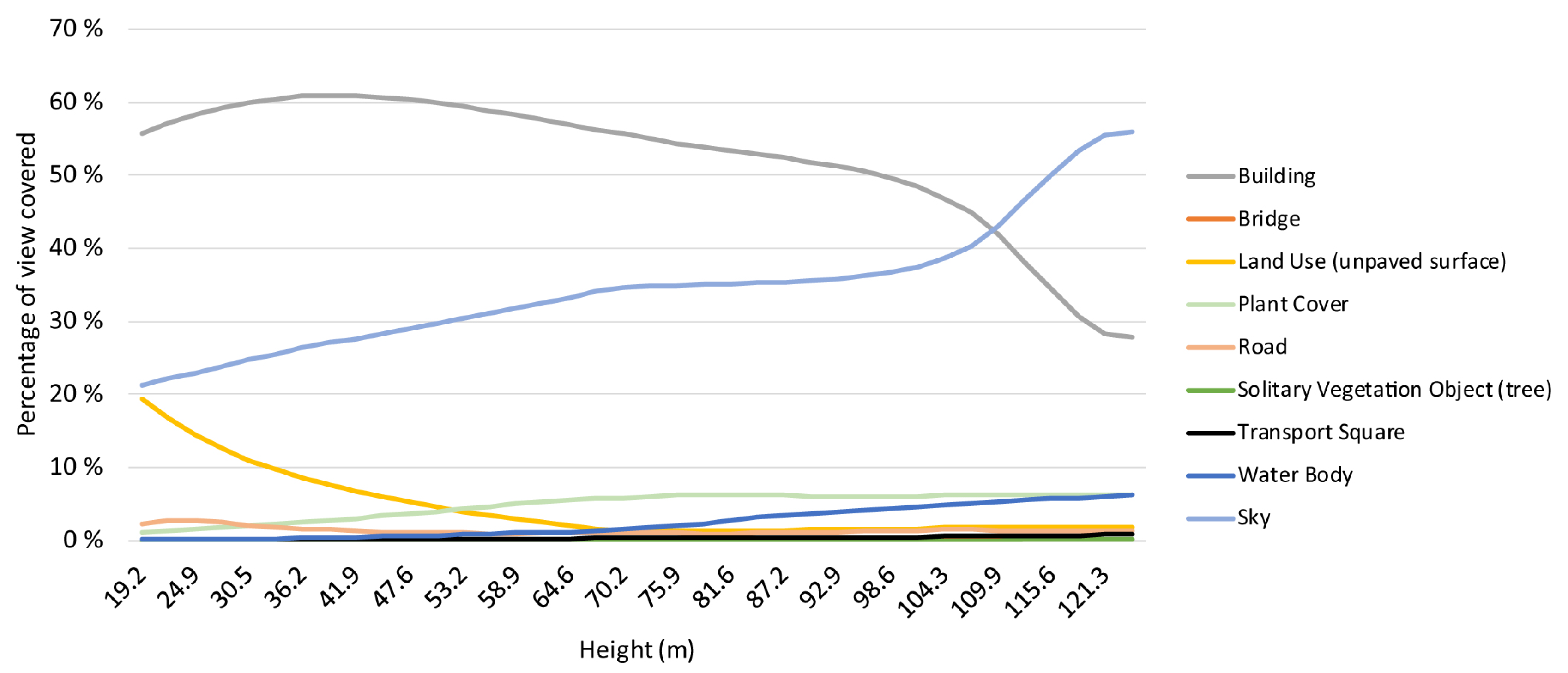
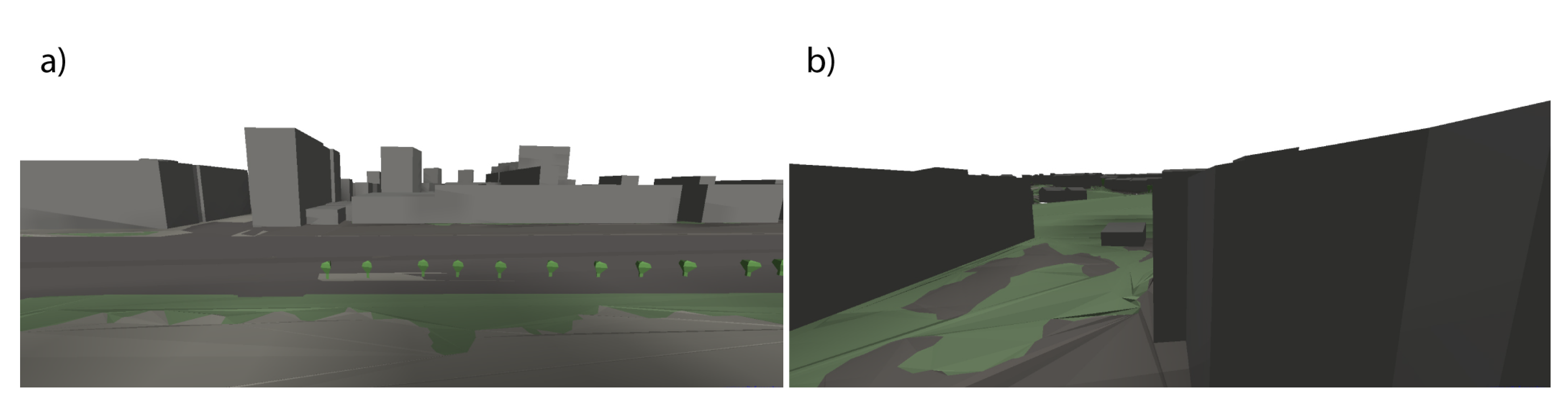
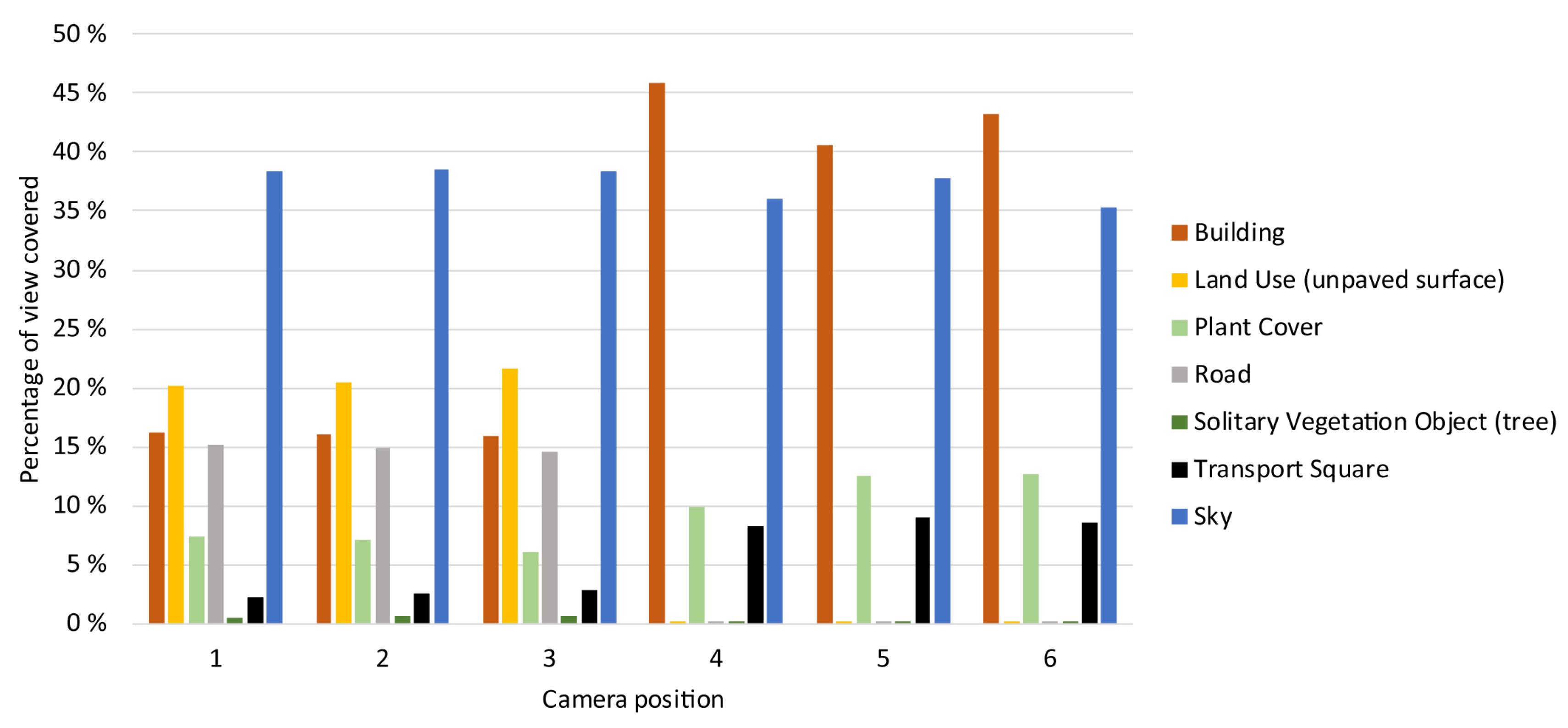
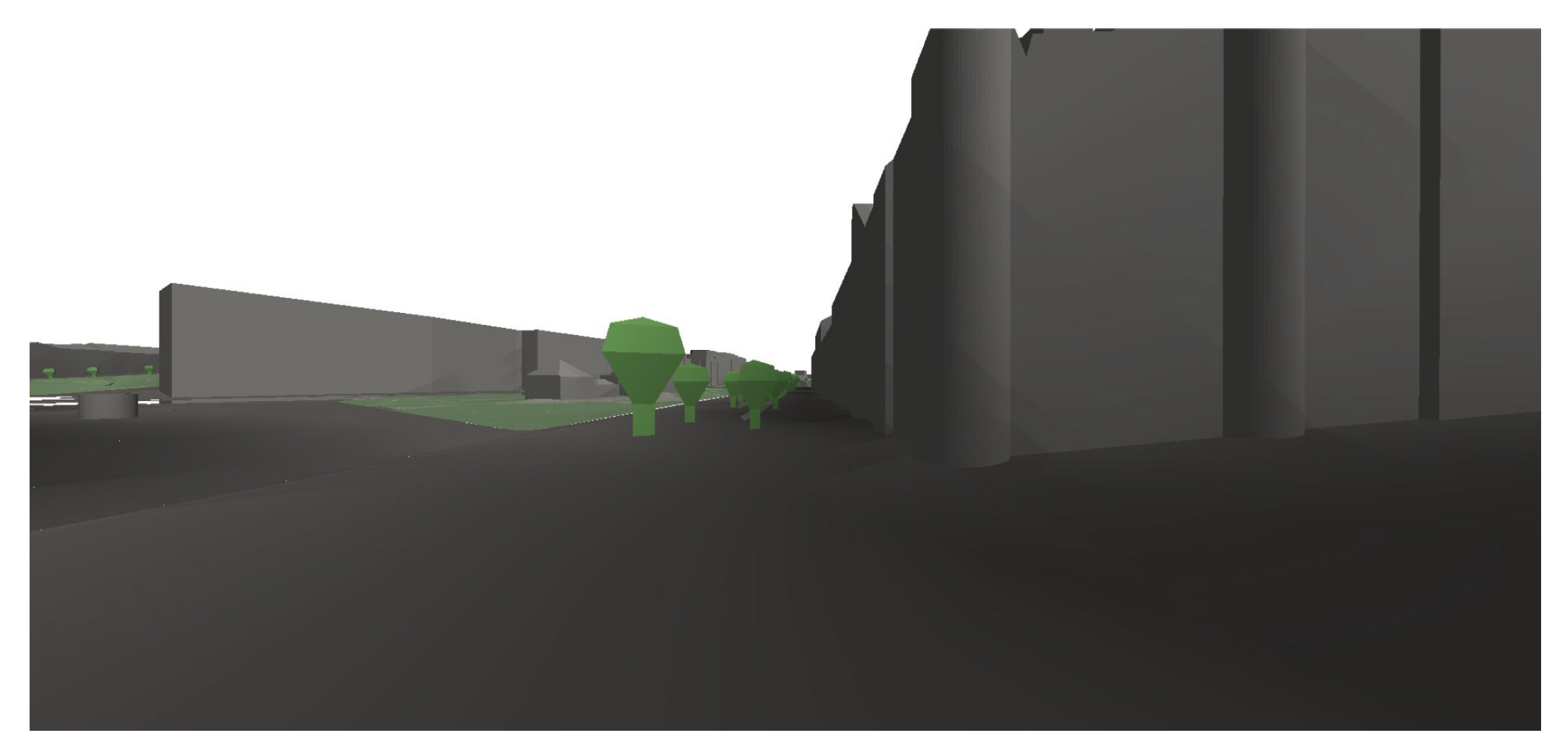
3.5.1. View Analysis for Varying Viewing Positions in Buildings
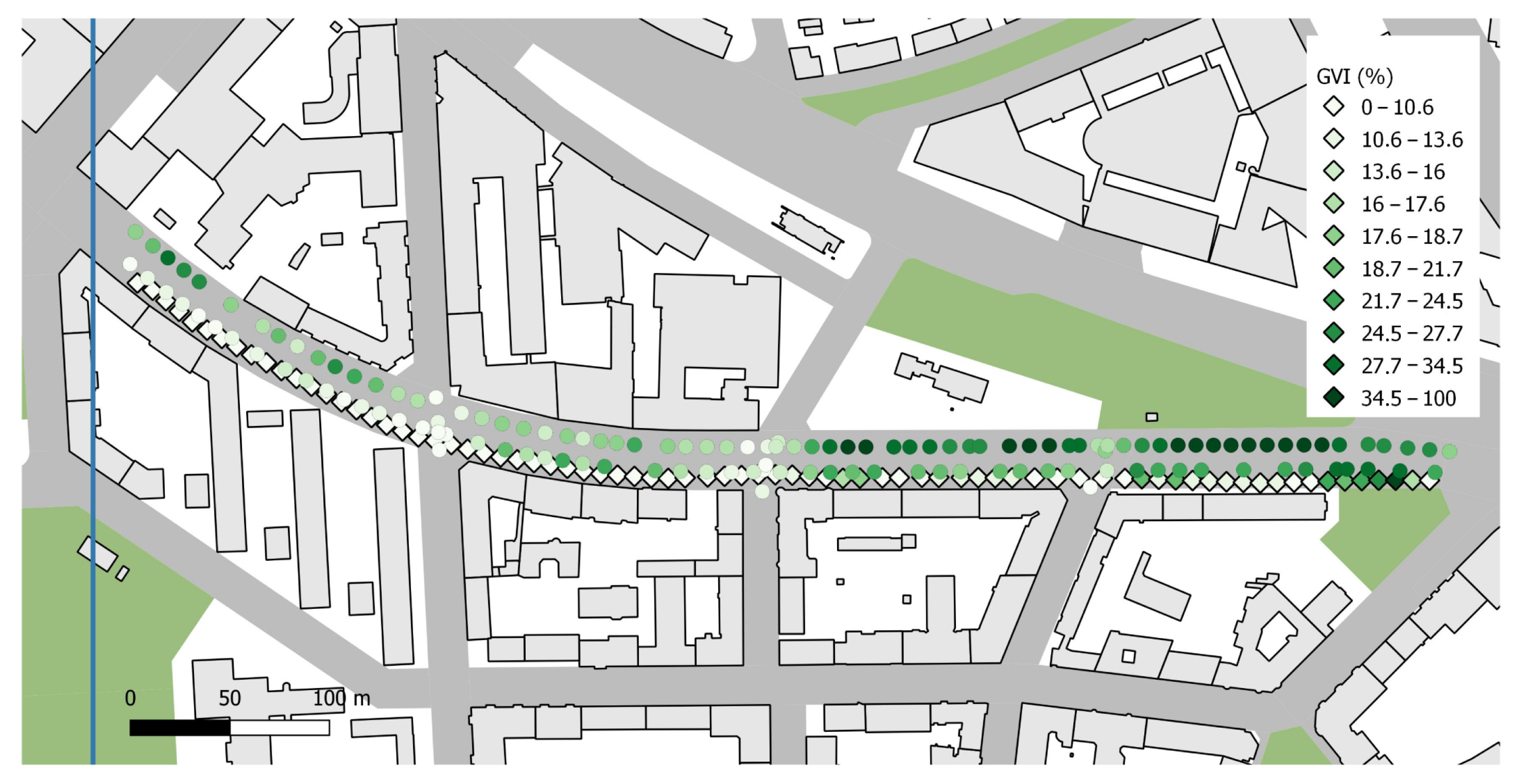
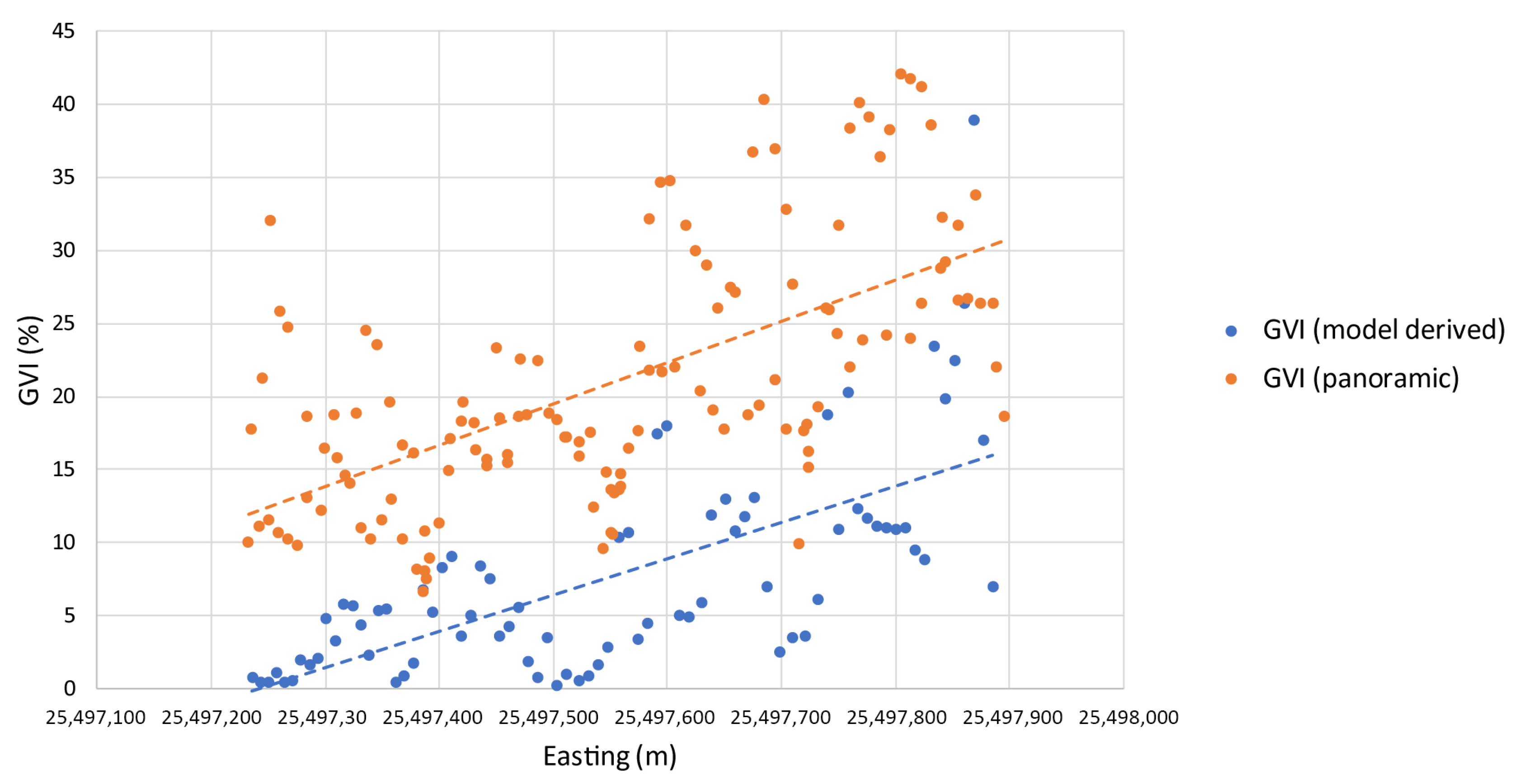
3.5.2. Comparison of Model Derived and Panoramic Image Street Level GVI
4. Results
4.1. Data Integration in CityJSON
4.2. View Analysis for Varying Viewing Positions in Buildings
4.3. Comparison of Model Derived and Panoramic Image Street Level GVI
5. Discussion
5.1. Notes on the Applied Data Integration Process
5.2. On GVI Comparison with Panoramic Images
5.3. On Limitations of Browser Based Implementation
5.4. Future Research Topics
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| VR | Virtual reality |
| UGI | Urban green infrastructure |
| GVI | Green view index |
| NDVI | Normalized difference vegetation index |
| JSON | JavaScript object notation |
| GSV | Google street view |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1st or 2nd Level City Object | R, G, B Values (8 Bit) | Color Sample |
|---|---|---|
| Building | 115, 114, 111 | |
| Building part | 143, 139, 126 | |
| Building installation | 97, 94, 84 | |
| Bridge | 117, 117, 117 | |
| Bridge part | 74, 74, 74 | |
| Bridge installation | 105, 105, 105 | |
| Bridge construction element | 122, 122, 122 | |
| City object group | 90, 95, 97 | |
| City furniture | 123, 130, 133 | |
| Generic city object | 165, 173, 176 | |
| LandUse | 133, 131, 123 | |
| Plant cover | 104, 125, 94 | |
| Railway | 89, 75, 63 | |
| Road | 89, 86, 84 | |
| Solitary vegetation object | 94, 140, 76 | |
| TINRelief | 122, 135, 116 | |
| Transport square | 92, 89, 85 | |
| Tunnel | 69, 67, 64 | |
| Tunnel part | 102, 99, 95 | |
| Tunnel installation | 107, 101, 92 | |
| Water body | 139, 172, 181 |
References
- Zhu, Q.; Hu, M.; Zhang, Y.; Du, Z. Research and practice in three-dimensional city modeling. Geo-Spat. Inf. Sci. 2009, 12, 18–24. [Google Scholar] [CrossRef]
- Gröger, G.; Plümer, L. CityGML—Interoperable semantic 3D city models. ISPRS J. Photogramm. Remote Sens. 2012, 71, 12–33. [Google Scholar] [CrossRef]
- Cousins, S. 3D mapping Helsinki: How mega digital models can help city planners. Constr. Res. Innov. 2017, 8, 102–106. [Google Scholar] [CrossRef]
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D City Models: State of the Art Review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Bao, K.; Padsala, R.; Thrän, D.; Schröter, B. Urban Water Demand Simulation in Residential and Non-Residential Buildings Based on a CityGML Data Model. ISPRS Int. J. Geo-Inf. 2020, 9, 642. [Google Scholar] [CrossRef]
- HosseiniHaghighi, S.; Izadi, F.; Padsala, R.; Eicker, U. Using Climate-Sensitive 3D City Modeling to Analyze Outdoor Thermal Comfort in Urban Areas. ISPRS Int. J. Geo-Inf. 2020, 9, 688. [Google Scholar] [CrossRef]
- Agugiaro, G.; González, F.G.G.; Cavallo, R. The City of Tomorrow from… the Data of Today. ISPRS Int. J. Geo-Inf. 2020, 9, 554. [Google Scholar] [CrossRef]
- Yao, Z.; Nagel, C.; Kunde, F.; Hudra, G.; Willkomm, P.; Donaubauer, A.; Adolphi, T.; Kolbe, T.H. 3DCityDB—A 3D geodatabase solution for the management, analysis, and visualization of semantic 3D city models based on CityGML. Open Geospat. Data Softw. Stand. 2018, 3, 5. [Google Scholar] [CrossRef] [Green Version]
- Döllner, J.; Kolbe, T.H.; Liecke, F.; Sgouros, T.; Teichmann, K. The virtual 3d city model of berlin-managing, integrating, and communicating complex urban information. In Proceedings of the 25th International Symposium on Urban Data Management (UDMS), Aalborg, Denmark, 15–17 May 2006. [Google Scholar]
- Czyńska, K. Application of Lidar Data and 3D-City Models in Visual Impact Simulations of Tall Buildings. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-7/W3, 1359–1366. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; He, Z.; Gong, J. A virtual globe-based 3D visualization and interactive framework for public participation in urban planning processes. Comput. Environ. Urban Syst. 2010, 34, 291–298. [Google Scholar] [CrossRef]
- Hildebrandt, D.; Döllner, J. Service-oriented, standards-based 3D geovisualization: Potential and challenges. Comput. Environ. Urban Syst. 2010, 34, 484–495. [Google Scholar] [CrossRef]
- Hagedorn, B.; Hildebrandt, D.; Döllner, J. Towards Advanced and Interactive Web Perspective View Services. In Developments in 3D Geo-Information Sciences; Neutens, T., Maeyer, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 33–51. [Google Scholar] [CrossRef] [Green Version]
- Virtanen, J.P.; Hyyppä, H.; Kurkela, M.; Vaaja, M.T.; Puustinen, T.; Jaalama, K.; Julin, A.; Pouke, M.; Kukko, A.; Turppa, T.; et al. Browser based 3D for the built environment. Nord. J. Surv. Real Estate Res. 2018, 13, 54–76. [Google Scholar] [CrossRef]
- Romero Rodríguez, L.; Duminil, E.; Sánchez Ramos, J.; Eicker, U. Assessment of the photovoltaic potential at urban level based on 3D city models: A case study and new methodological approach. Sol. Energy 2017, 146, 264–275. [Google Scholar] [CrossRef]
- Julin, A.; Jaalama, K.; Virtanen, J.P.; Maksimainen, M.; Kurkela, M.; Hyyppä, J.; Hyyppä, H. Automated Multi-Sensor 3D Reconstruction for the Web. ISPRS Int. J. Geo-Inf. 2019, 8, 221. [Google Scholar] [CrossRef] [Green Version]
- Virtanen, J.P.; Kurkela, M.; Turppa, T.; Vaaja, M.T.; Julin, A.; Kukko, A.; Hyyppä, J.; Ahlavuo, M.; von Numers, J.; Haggrén, H.; et al. Depth camera indoor mapping for 3D virtual radio play. Photogramm. Rec. 2018, 33, 171–195. [Google Scholar] [CrossRef] [Green Version]
- Julin, A.; Jaalama, K.; Virtanen, J.P.; Pouke, M.; Ylipulli, J.; Vaaja, M.; Hyyppä, J.; Hyyppä, H. Characterizing 3D City Modeling Projects: Towards a Harmonized Interoperable System. ISPRS Int. J. Geo-Inf. 2018, 7, 55. [Google Scholar] [CrossRef] [Green Version]
- Ledoux, H.; Arroyo Ohori, K.; Kumar, K.; Dukai, B.; Labetski, A.; Vitalis, S. CityJSON: A compact and easy-to-use encoding of the CityGML data model. Open Geospat. Data Softw. Stand. 2019, 4, 4. [Google Scholar] [CrossRef]
- Nys, G.A.; Poux, F.; Billen, R. CityJSON Building Generation from Airborne LiDAR 3D Point Clouds. ISPRS Int. J. Geo-Inf. 2020, 9, 521. [Google Scholar] [CrossRef]
- Vitalis, S.; Arroyo Ohori, K.; Stoter, J. CityJSON in QGIS: Development of an open-source plugin. Trans. GIS 2020, 24, 1147–1164. [Google Scholar] [CrossRef]
- Kumar, K.; Ledoux, H.; Stoter, J. Dynamic 3D Visualization of Floods: Case of the Netherlands. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-4/W10, 83–87. [Google Scholar] [CrossRef] [Green Version]
- Delikostidis, I.; Engel, J.; Retsios, B.; van Elzakker, C.P.; Kraak, M.J.; Döllner, J. Increasing the Usability of Pedestrian Navigation Interfaces by means of Landmark Visibility Analysis. J. Navig. 2013, 66, 523–537. [Google Scholar] [CrossRef] [Green Version]
- Yang, P.P.J.; Putra, S.Y.; Li, W. Viewsphere: A GIS-Based 3D Visibility Analysis for Urban Design Evaluation. Environ. Plan. B Plan. Des. 2007, 34, 971–992. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.; Yu, B.; Song, W.; Wu, B.; Zhou, J.; Huang, Y.; Wu, J.; Zhao, F.; Mao, W. View-based greenery: A three-dimensional assessment of city buildings’ green visibility using Floor Green View Index. Landsc. Urban Plan. 2016, 152, 13–26. [Google Scholar] [CrossRef]
- Yu, S.M.; Han, S.S.; Chai, C.H. Modeling the Value of View in High-Rise Apartments: A 3D GIS Approach. Environ. Plan. B Plan. Des. 2007, 34, 139–153. [Google Scholar] [CrossRef]
- Hamilton, S.E.; Morgan, A. Integrating lidar, GIS and hedonic price modeling to measure amenity values in urban beach residential property markets. Comput. Environ. Urban Syst. 2010, 34, 133–141. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhang, C.; Li, W.; Ricard, R.; Meng, Q.; Zhang, W. Assessing street-level urban greenery using Google Street View and a modified green view index. Urban For. Urban Green. 2015, 14, 675–685. [Google Scholar] [CrossRef]
- Bishop, I.D. Assessment of Visual Qualities, Impacts, and Behaviours, in the Landscape, by Using Measures of Visibility. Environ. Plan. B Plan. Des. 2003, 30, 677–688. [Google Scholar] [CrossRef]
- Toikka, A.; Willberg, E.; Mäkinen, V.; Toivonen, T.; Oksanen, J. The green view dataset for the capital of Finland, Helsinki. Data Brief 2020, 30, 105601. [Google Scholar] [CrossRef]
- Gong, Z.; Ma, Q.; Kan, C.; Qi, Q. Classifying Street Spaces with Street View Images for a Spatial Indicator of Urban Functions. Sustainability 2019, 11, 6424. [Google Scholar] [CrossRef] [Green Version]
- Ye, Y.; Richards, D.; Lu, Y.; Song, X.; Zhuang, Y.; Zeng, W.; Zhong, T. Measuring daily accessed street greenery: A human-scale approach for informing better urban planning practices. Landsc. Urban Plan. 2019, 191, 103434. [Google Scholar] [CrossRef]
- Zhang, Y.; Dong, R. Impacts of Street-Visible Greenery on Housing Prices: Evidence from a Hedonic Price Model and a Massive Street View Image Dataset in Beijing. ISPRS Int. J. Geo-Inf. 2018, 7, 104. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Zhou, C.; Li, F. Quantifying the green view indicator for assessing urban greening quality: An analysis based on Internet-crawling street view data. Ecol. Indic. 2020, 113, 106192. [Google Scholar] [CrossRef]
- Virtanen, J.P.; Puustinen, T.; Pennanen, K.; Vaaja, M.T.; Kurkela, M.; Viitanen, K.; Hyyppä, H.; Röonnholm, P. Customized visualizations of urban infill development scenarios for local stakeholders. J. Build. Constr. Plan. Res. 2015, 3, 68. [Google Scholar] [CrossRef] [Green Version]
- Czyńska, K. High Precision Visibility and Dominance Analysis of Tall Building in Cityscape On a basis of Digital Surface Model. In Proceedings of the 36th Annual Conference eCAADe 2018, Lodz, Poland, 17–21 September 2018. [Google Scholar]
- Puustinen, T.; Pennanen, K.; Falkenbach, H.; Viitanen, K. The distribution of perceived advantages and disadvantages of infill development among owners of a commonhold and its’ implications. Land Use Policy 2018, 75, 303–313. [Google Scholar] [CrossRef] [Green Version]
- Puustinen, T. Infill Development in Growing Urban Areas: Experiences in Finnish Housing Companies and Perspectives of Owner-Occupiers [Täydennysrakentaminen Kasvavilla Kaupunkialueilla: Kokemuksia Suomalaisissa Asunto-Osakeyhtiöissä ja Asukasosakkaiden Näkökulmia]. Ph.D. Thesis, Aalto University, Espoo, Finland, 2020. [Google Scholar]
- Ulrich, R. View through a window may influence recovery from surgery. Science 1984, 224, 420–421. [Google Scholar] [CrossRef] [Green Version]
- Tsunetsugu, Y.; Lee, J.; Park, B.J.; Tyrväinen, L.; Kagawa, T.; Miyazaki, Y. Physiological and psychological effects of viewing urban forest landscapes assessed by multiple measurements. Landsc. Urban Plan. 2013, 113, 90–93. [Google Scholar] [CrossRef]
- Helbich, M.; Yao, Y.; Liu, Y.; Zhang, J.; Liu, P.; Wang, R. Using deep learning to examine street view green and blue spaces and their associations with geriatric depression in Beijing, China. Environ. Int. 2019, 126, 107–117. [Google Scholar] [CrossRef]
- Li, X.; Ghosh, D. Associations between Body Mass Index and Urban “Green” Streetscape in Cleveland, Ohio, USA. Int. J. Environ. Res. Public Health 2018, 15, 2186. [Google Scholar] [CrossRef] [Green Version]
- Wolch, J.R.; Byrne, J.; Newell, J.P. Urban green space, public health, and environmental justice: The challenge of making cities ‘just green enough’. Landsc. Urban Plan. 2014, 125, 234–244. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Zhao, L.; Mcbride, J.; Gong, P. Can you see green? Assessing the visibility of urban forests in cities. Landsc. Urban Plan. 2009, 91, 97–104. [Google Scholar] [CrossRef]
- Verma, D.; Jana, A.; Ramamritham, K. Machine-based understanding of manually collected visual and auditory datasets for urban perception studies. Landsc. Urban Plan. 2019, 190, 103604. [Google Scholar] [CrossRef]
- Wang, R.; Lu, Y.; Wu, X.; Liu, Y.; Yao, Y. Relationship between eye-level greenness and cycling frequency around metro stations in Shenzhen, China: A big data approach. Sustain. Cities Soc. 2020, 59, 102201. [Google Scholar] [CrossRef]
- Fu, Y.; Song, Y. Evaluating Street View Cognition of Visible Green Space in Fangcheng District of Shenyang with the Green View Index. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 144–148. [Google Scholar] [CrossRef]
- Falfán, I.; Muñoz-Robles, C.A.; Bonilla-Moheno, M.; MacGregor-Fors, I. Can you really see ‘green’? Assessing physical and self-reported measurements of urban greenery. Urban For. Urban Green. 2018, 36, 13–21. [Google Scholar] [CrossRef]
- Villeneuve, P.J.; Ysseldyk, R.L.; Root, A.; Ambrose, S.; DiMuzio, J.; Kumar, N.; Shehata, M.; Xi, M.; Seed, E.; Li, X.; et al. Comparing the Normalized Difference Vegetation Index with the Google Street View Measure of Vegetation to Assess Associations between Greenness, Walkability, Recreational Physical Activity, and Health in Ottawa, Canada. Int. J. Environ. Res. Public Health 2018, 15, 1719. [Google Scholar] [CrossRef] [Green Version]
- Ki, D.; Lee, S. Analyzing the effects of Green View Index of neighborhood streets on walking time using Google Street View and deep learning. Landsc. Urban Plan. 2021, 205, 103920. [Google Scholar] [CrossRef]
- Shen, Q.; Zeng, W.; Ye, Y.; Arisona, S.M.; Schubiger, S.; Burkhard, R.; Qu, H. StreetVizor: Visual Exploration of Human-Scale Urban Forms Based on Street Views. IEEE Trans. Vis. Comput. Graph. 2018, 24, 1004–1013. [Google Scholar] [CrossRef]
- Larkin, A.; Hystad, P. Evaluating street view exposure measures of visible green space for health research. J. Expo. Sci. Environ. Epidemiol. 2019, 29, 447–456. [Google Scholar] [CrossRef]
- Li, X. Examining the spatial distribution and temporal change of the green view index in New York City using Google Street View images and deep learning. Environ. Plan. Urban Anal. City Sci. 2020. [Google Scholar] [CrossRef]
- Zhou, H.; He, S.; Cai, Y.; Wang, M.; Su, S. Social inequalities in neighborhood visual walkability: Using street view imagery and deep learning technologies to facilitate healthy city planning. Sustain. Cities Soc. 2019, 50, 101605. [Google Scholar] [CrossRef]
- Yu, X.; Zhao, G.; Chang, C.; Yuan, X.; Heng, F. BGVI: A New Index to Estimate Street-Side Greenery Using Baidu Street View Image. Forests 2019, 10, 3. [Google Scholar] [CrossRef] [Green Version]
- DeFries, R.S.; Townshend, J.R.G. NDVI-derived land cover classifications at a global scale. Int. J. Remote Sens. 1994, 15, 3567–3586. [Google Scholar] [CrossRef]
- Kumakoshi, Y.; Chan, S.Y.; Koizumi, H.; Li, X.; Yoshimura, Y. Standardized Green View Index and Quantification of Different Metrics of Urban Green Vegetation. Sustainability 2020, 12, 7434. [Google Scholar] [CrossRef]
- 3D Models of Helsinki-Kalasatama Digital Twins Pilot Project’s CityGML Files. Available online: https://hri.fi/data/en_GB/dataset/helsingin-3d-kaupunkimalli/resource/cd7ed6e8-fd77-4319-bc67-692f7dfc43de (accessed on 5 February 2021).
- Register of Public Areas in the City of Helsinki. Available online: https://hri.fi/data/en_GB/dataset/helsingin-kaupungin-yleisten-alueiden-rekisteri (accessed on 5 February 2021).
- Metropolitan Area Land Cover. Available online: https://hri.fi/data/en_GB/dataset/paakaupunkiseudun-maanpeiteaineisto (accessed on 5 February 2021).
- Urban Tree Database of the City of Helsinki. Available online: https://hri.fi/data/en_GB/dataset/helsingin-kaupungin-puurekisteri (accessed on 5 February 2021).
- Elevation Model 2 m. Available online: https://www.maanmittauslaitos.fi/en/maps-and-spatial-data/expert-users/product-descriptions/elevation-model-2-m (accessed on 5 February 2021).
- citygml-Tools. Available online: https://github.com/citygml4j/citygml-tools (accessed on 5 February 2021).
- CityJSON/io. Available online: https://github.com/cityjson/cjio (accessed on 5 February 2021).
- Point Sampling Tool. Available online: https://plugins.qgis.org/plugins/pointsamplingtool/ (accessed on 5 February 2021).
- CityJSON Specifications 1.0.1. Available online: https://www.cityjson.org/specs/1.0.1/ (accessed on 5 February 2021).
- CityJSON Viewer. Available online: https://github.com/tudelft3d/CityJSON-viewer (accessed on 5 February 2021).
- Three.js. Available online: https://threejs.org/ (accessed on 5 February 2021).
- Earcut. Available online: https://github.com/mapbox/earcut (accessed on 5 February 2021).
- OrbitControls. Available online: https://threejs.org/docs/#examples/en/controls/OrbitControls (accessed on 5 February 2021).
- Vitalis, S.; Labetski, A.; Boersma, F.; Dahle, F.; Li, X.; Arroyo Ohori, K.; Ledoux, H.; Stoter, J. CITYJSON + WEB = NINJA. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, VI-4/W1-2020, 167–173. [Google Scholar] [CrossRef]
- Prandi, F.; Devigili, F.; Soave, M.; Di Staso, U.; De Amicis, R. 3D web visualization of huge CityGML models. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-3/W3, 601–605. [Google Scholar] [CrossRef] [Green Version]
- Weinmann, M.; Jutzi, B.; Hinz, S.; Mallet, C. Semantic point cloud interpretation based on optimal neighborhoods, relevant features and efficient classifiers. ISPRS J. Photogramm. Remote Sens. 2015, 105, 286–304. [Google Scholar] [CrossRef]
- Virtanen, J.P.; Daniel, S.; Turppa, T.; Zhu, L.; Julin, A.; Hyyppä, H.; Hyyppä, J. Interactive dense point clouds in a game engine. ISPRS J. Photogramm. Remote Sens. 2020, 163, 375–389. [Google Scholar] [CrossRef]
- CesiumJS. Available online: https://cesium.com/cesiumjs/ (accessed on 5 February 2021).
- Lafrance, F.; Daniel, S.; Dragićević, S. Multidimensional Web GIS Approach for Citizen Participation on Urban Evolution. ISPRS Int. J. Geo-Inf. 2019, 8, 253. [Google Scholar] [CrossRef] [Green Version]
- Onyimbi, J.R.; Koeva, M.; Flacke, J. Public Participation Using 3D Web-Based City Models: Opportunities for E-Participation in Kisumu, Kenya. ISPRS Int. J. Geo-Inf. 2018, 7, 454. [Google Scholar] [CrossRef] [Green Version]
- Feltynowski, M.; Kronenberg, J.; Bergier, T.; Kabisch, N.; Łaszkiewicz, E.; Strohbach, M. Challenges of urban green space management in the face of using inadequate data. Urban For. Urban Green. 2018, 31, 56–66. [Google Scholar] [CrossRef]

















| Dataset | Role | Description | Source |
|---|---|---|---|
| CityGML model of the Kalasatama region | Starting point for creating the enriched 3D city model for view analysis | Building & bridge models | [58] |
| Register of public areas in the city of Helsinki | Map data used in enriching the 3D city model | Polygons of road areas | [59] |
| Polygons describing public vegetated areas (e.g., parks) | |||
| Land cover classification (in polygons) | Polygons of land cover classes (obtained from aerial imagery) | [60] | |
| Tree register | Registry of trees, represented as points with positions and stem widths (in five classes) | [61] | |
| Elevation model (2 m resolution) | Used to provide elevation for the map data | Digital elevation model (obtained from airborne laser scanning) | [62] |
| GVI derived from Google panoramic images | Comparison data set for experiment 2 | GVI indexes for panoramic imaging positions | [30] |
| Data Set | Object Group/Class | 1st Level City Objects (CityJSON 1.0.1) |
|---|---|---|
| CityGML model | Bridges | Bridge |
| Buildings | Building | |
| Register of public areas in the city of Helsinki | Polygons of road areas | Road |
| Polygons of vegetated areas | Plant cover | |
| Tree register | Individual trees | Solitary vegetation object |
| Land cover classification (in polygons) | Bare bedrock | Land use |
| Unclassified | Discarded | |
| Sea surface | Water body | |
| Other low vegetation | Plant cover | |
| Other paved surface | Transport square | |
| Unpaved road | Road | |
| Paved road | Discarded | |
| Bare ground | Land use | |
| Field | Not present in test site | |
| Trees, height over 20 m | Plant cover | |
| Trees, height 15–20 m | ||
| Trees, height 10–15 m | ||
| Trees, height 2–10 m | ||
| Building | Discarded | |
| Water surface | Water body | |
| CityJSON 1st level city objects not used | TIN Relief | |
| Generic city object | ||
| City furniture | ||
| City object group | ||
| Tunnel | ||
| Railway | ||
| Test Street 1 (Varying GVI) | Test Street 2 (Low GVI) | Test Street 3 (High GVI) | |
|---|---|---|---|
| Minimum GVI (%) | 6.6 | 0.4 | 36.5 |
| Maximum GVI (%) | 42.0 | 18.9 | 58.9 |
| Average GVI (%) | 21.0 | 5.7 | 49.1 |
| Std.Dev. of GVI | 8.7 | 3.9 | 6.6 |
| Total sample count | 132 | 48 | 37 |
| Test Street 1 (Varying GVI) | Difference to Panoramic GVI (pp) | Test Street 2 (Low GVI) | Difference to Panoramic GVI (pp) | Test Street 3 (High GVI) | Difference to Panoramic GVI (pp) | |
|---|---|---|---|---|---|---|
| Minimum GVI (%) | 0.3 | −6.4 | 0 | −0.4 | 23.1 | −13.4 |
| Maximum GVI (%) | 38.9 | −3.2 | 0.1 | −18.9 | 37.2 | −21.7 |
| Average GVI (%) | 7.6 | −13.4 | 0.01 | −5.7 | 29.1 | −20.0 |
| Std.Dev. of GVI | 7.1 | −1.6 | 0.02 | −3.8 | 3.8 | −2.6 |
| Sample count | 77 | 42 | 23 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Virtanen, J.-P.; Jaalama, K.; Puustinen, T.; Julin, A.; Hyyppä, J.; Hyyppä, H. Near Real-Time Semantic View Analysis of 3D City Models in Web Browser. ISPRS Int. J. Geo-Inf. 2021, 10, 138. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10030138
Virtanen J-P, Jaalama K, Puustinen T, Julin A, Hyyppä J, Hyyppä H. Near Real-Time Semantic View Analysis of 3D City Models in Web Browser. ISPRS International Journal of Geo-Information. 2021; 10(3):138. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10030138
Chicago/Turabian StyleVirtanen, Juho-Pekka, Kaisa Jaalama, Tuulia Puustinen, Arttu Julin, Juha Hyyppä, and Hannu Hyyppä. 2021. "Near Real-Time Semantic View Analysis of 3D City Models in Web Browser" ISPRS International Journal of Geo-Information 10, no. 3: 138. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10030138