
A Research on Landslides Automatic Extraction Model Based on the Improved Mask R-CNN



 ,
,
Abstract
:1. Introduction
2. Model
2.1. The Developed Model
RoI Align
2.2. Improvement of the Mask R-CNN Network Structure
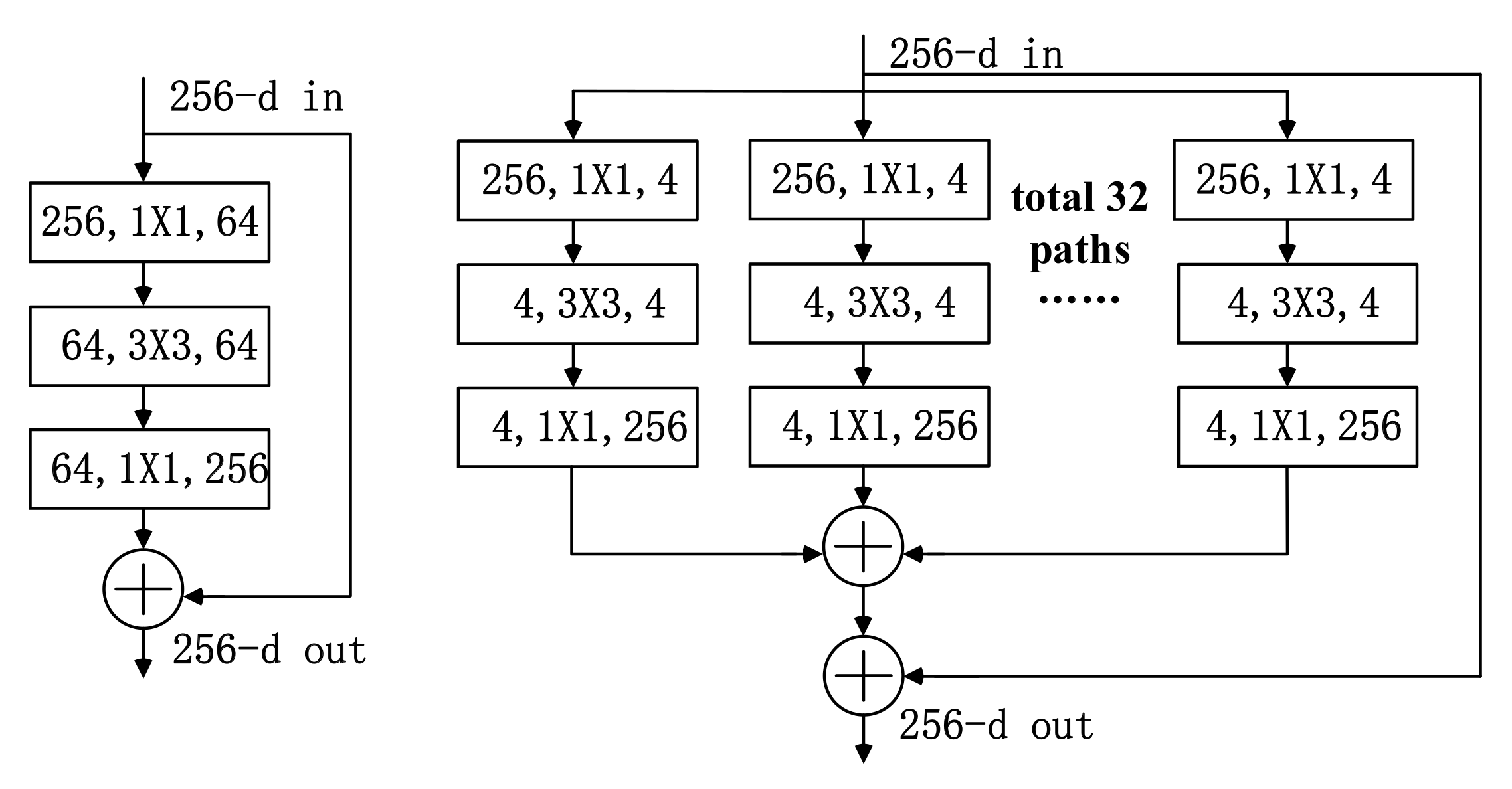
2.2.1. Improvement of the Feature Extraction Network Structure
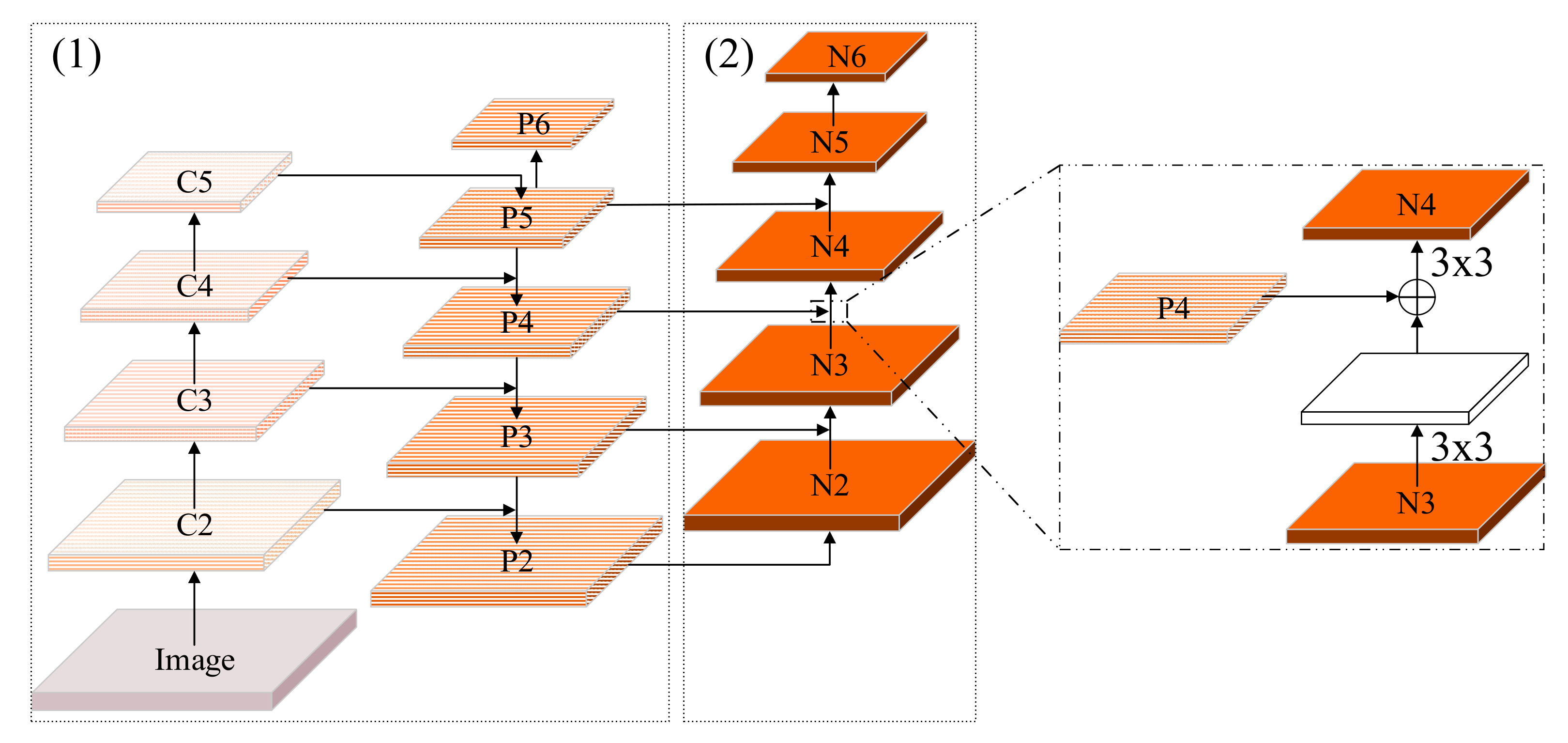
2.2.2. Improvement of FPN
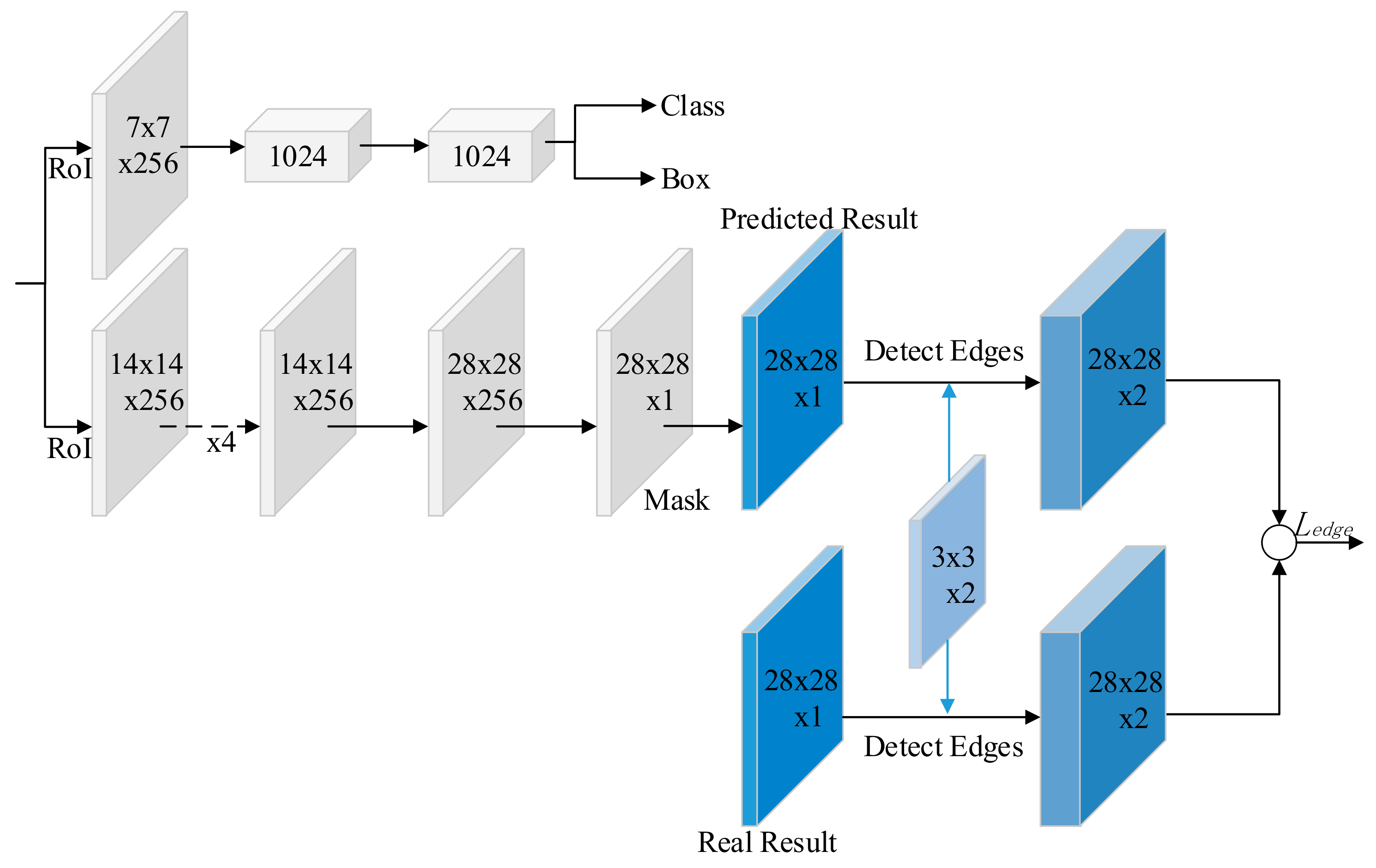
2.3. Improvement of the Mask R-CNN Loss Functions
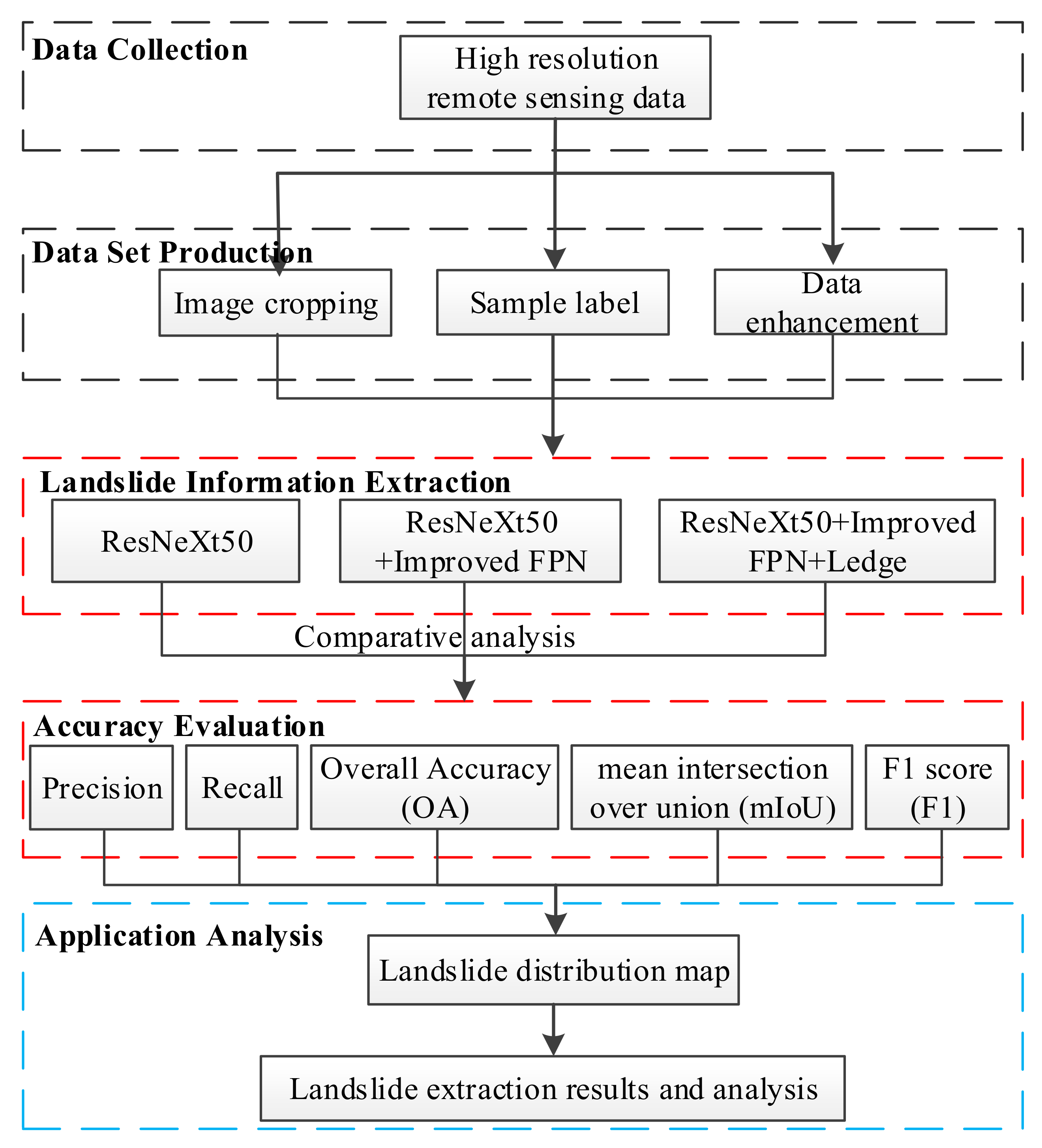
2.4. Technical Flowchart
2.5. Accuracy Evaluation
2.5.1. Precision, Recall, and OA
2.5.2. Mean Intersection over Union
2.5.3. F1 Score
3. Experiment
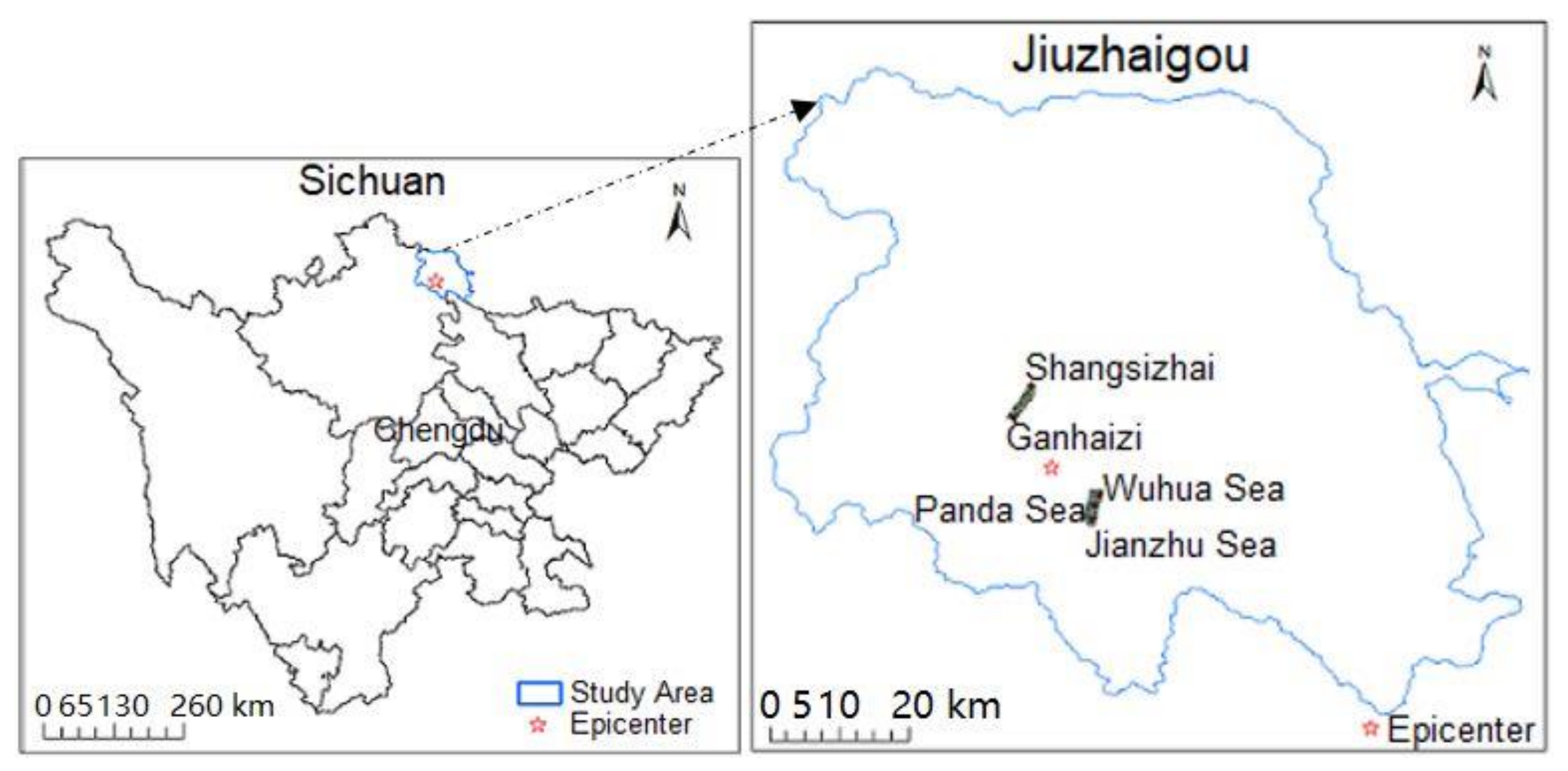
3.1. Application of the Model to the Jiuzhaigou County
3.2. Data Set
3.2.1. Remote Sensing Data Acquisition
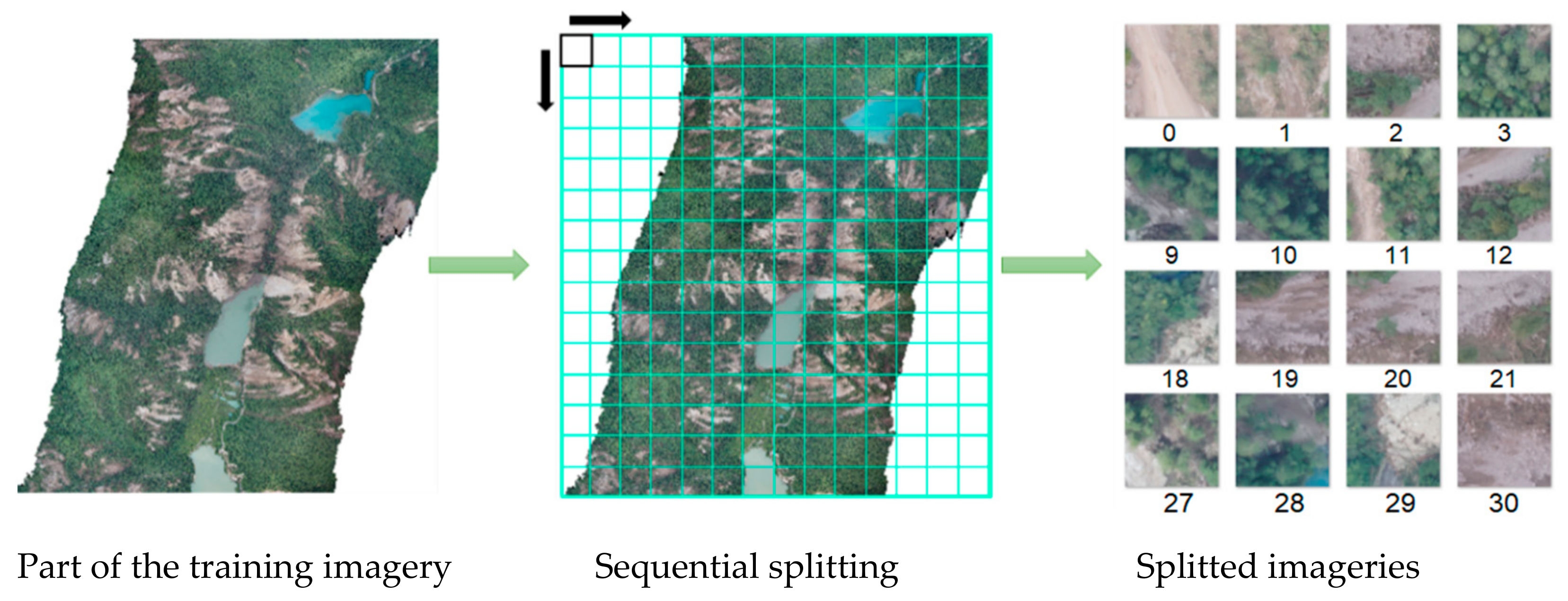
3.2.2. Data Set Production
3.2.3. Data Set Enhancement
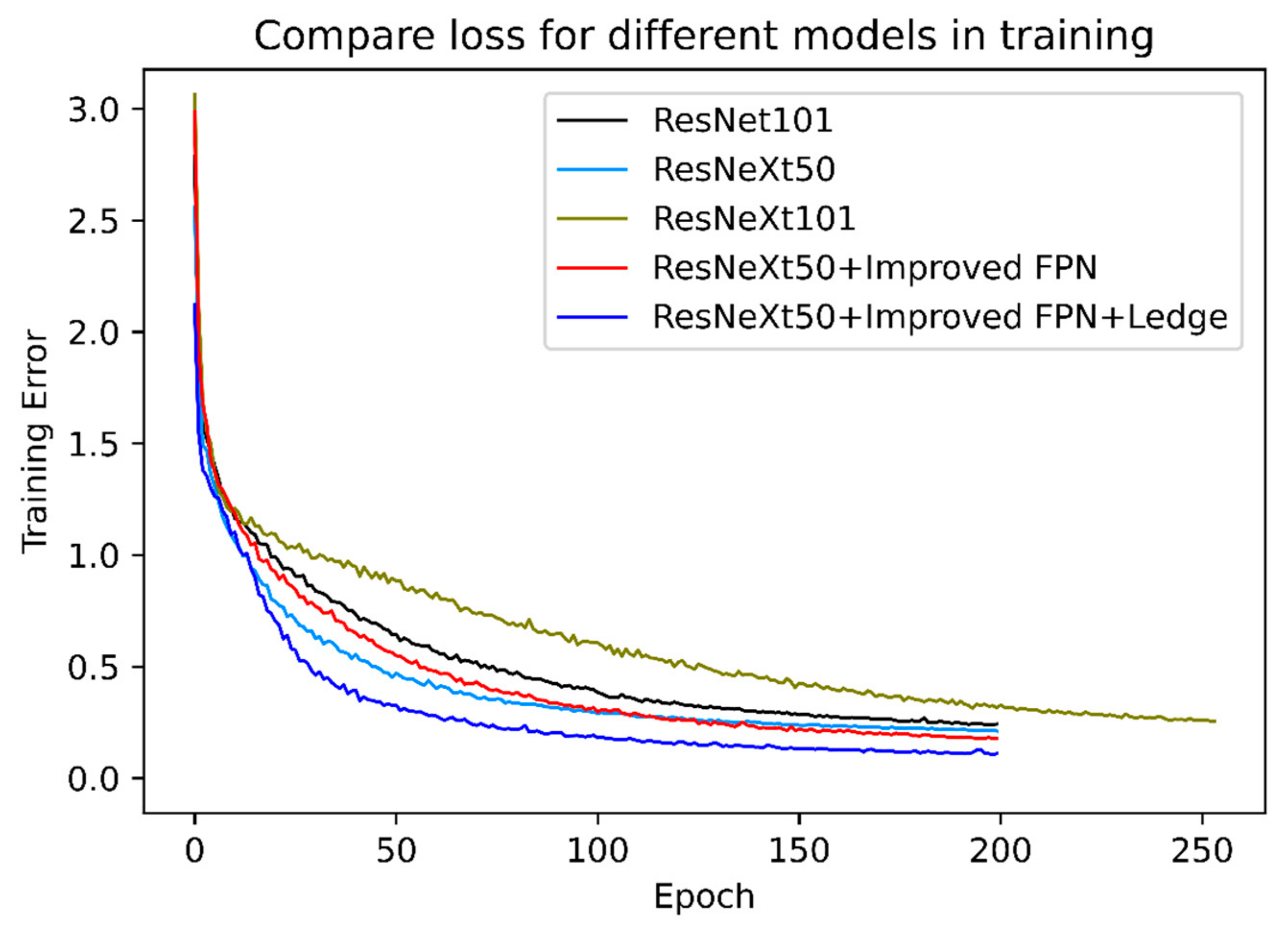
3.3. Experimental Environment and Model Training
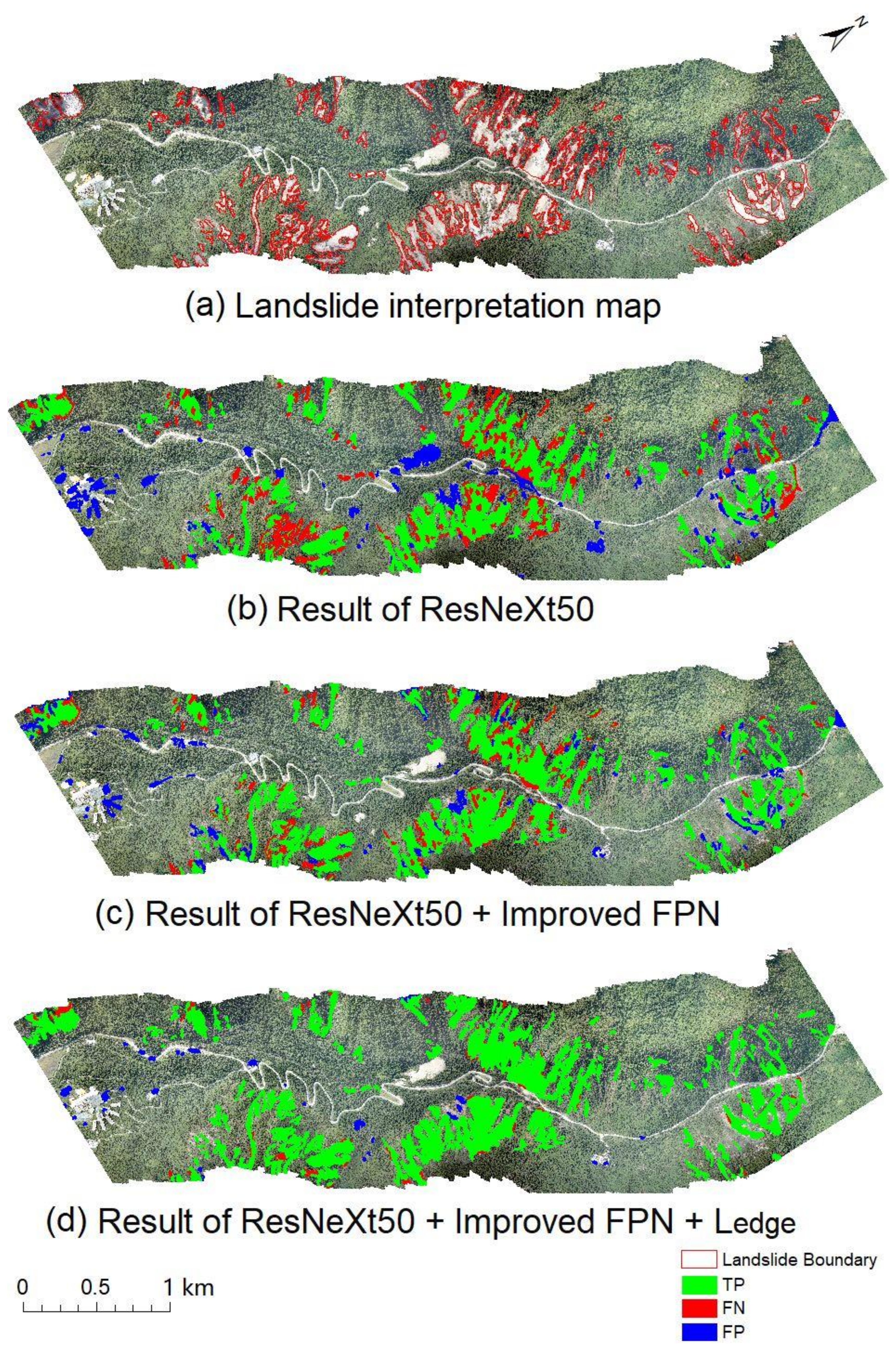
3.4. Experimental Results
4. Conclusions and Prospects
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tien Bui, D.; Shahabi, H.; Shirzadi, A.; Chapi, K.; Alizadeh, M.; Chen, W.; Mohammadi, A.; Ahmad, B.; Panahi, M.; Hong, H. Landslide Detection and Susceptibility Mapping by AIRSAR Data Using Support Vector Machine and Index of Entropy Models in Cameron Highlands, Malaysia. Remote Sens. 2018, 10, 1527. [Google Scholar] [CrossRef] [Green Version]
- Yin, Y.; Wang, F.; Sun, P. Landslide hazards triggered by the 2008 Wenchuan earthquake, Sichuan, China. Landslides 2009, 6, 139–152. [Google Scholar] [CrossRef]
- Zhao, C.; Lu, Z. Remote Sensing of Landslides-A Review. Remote Sens. 2018, 10, 279. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.-L.; Shan, X.-J.; Wang, M.-M.; Liu, C.-G.; Han, N.-N. Distribution Pattern of Coseismic Landslides Triggered by the 2017 Jiuzhaigou Ms 7.0 Earthquake of China: Control of Seismic Landslide Susceptibility. ISPRS Int. J. Geo Inf. 2020, 9, 198. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y. Principles and Methods in Remote Sensing Application and Analysis; Science Press: Beijing, China, 2003; pp. 188–190. [Google Scholar]
- Solari, L.; Del Soldato, M.; Raspini, F.; Barra, A.; Bianchini, S.; Confuorto, P.; Casagli, N.; Crosetto, M. Review of Satellite Interferometry for Landslide Detection in Italy. Remote Sens. 2020, 12, 1351. [Google Scholar] [CrossRef]
- Lv, Z.Y.; Shi, W.; Zhang, X.; Benediktsson, J.A. Landslide Inventory Mapping From Bitemporal High-Resolution Remote Sensing Images Using Change Detection and Multiscale Segmentation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1520–1532. [Google Scholar] [CrossRef]
- Barbarella, M.; Di Benedetto, A.; Fiani, M.; Guida, D.; Lugli, A. Use of DEMs Derived from TLS and HRSI Data for Landslide Feature Recognition. ISPRS Int. J. Geo Inf. 2018, 7, 160. [Google Scholar] [CrossRef] [Green Version]
- Ding, C.; Feng, G.; Zhou, Y.; Wang, H.; Du, Y.; Chen, C. Nepal Earthquake Triggered Landslides Recognition and Deformation Analysis of Avalanches’ Region. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 847–854. [Google Scholar]
- Zhao, Y. The Research of Building Earthquake Damage Change Detection Based on Object-Oriented Technology with Remote Sensing Image. Ph.D. Thesis, China University of Geosciences, Beijing, China, 2017. [Google Scholar]
- Wang, Q.; Lin, Q.; Li, M.; Wang, L.; Tian, Q. A Target-Highlighting Method in Multispectral Remote Sensing. Spectrosc. Spectr. Anal. 2009, 29, 1018–1022. [Google Scholar]
- Nichol, J.; Wong, M.S. Satellite remote sensing for detailed landslide inventories using change detection and image fusion. Int. J. Remote Sens. 2005, 26, 12–21. [Google Scholar] [CrossRef]
- Chen, T.; He, H.; Li, D.; An, P.; Hui, Z. Damage Signature Generation of Revetment Surface along Urban Rivers Using UAV-Based Mapping. ISPRS Int. J. Geo-Inf. 2020, 9, 283. [Google Scholar] [CrossRef]
- Lu, P.; Qin, Y.; Li, Z.; Mondini, A.C.; Casagli, N. Landslide mapping from multi-sensor data through improved change detection-based Markov random field. Remote Sens. Environ. 2019, 231, 235–248. [Google Scholar] [CrossRef]
- Stumpf, A.; Kerle, N. Object-oriented mapping of landslides using Random Forests. Remote Sens. Environ. 2011, 115, 2564–2577. [Google Scholar] [CrossRef]
- Lu, P.; Stumpf, A.; Kerle, N.; Casagli, N. Object-Oriented Change Detection for Landslide Rapid Mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 701–705. [Google Scholar] [CrossRef]
- Lu, H.; Ma, L.; Fu, X.; Liu, C.; Wang, Z.; Tang, M.; Li, N. Landslides Information Extraction Using Object-Oriented Image Analysis Paradigm Based on Deep Learning and Transfer Learning. Remote Sens. 2020, 12, 752. [Google Scholar] [CrossRef] [Green Version]
- Mondini, A.C.; Guzzetti, F.; Reichenbach, P.; Rossi, M.; Cardinali, M.; Ardizzone, F. Semi-automatic recognition and mapping of rainfall induced shallow landslides using optical satellite images. Remote Sens. Environ. 2011, 115, 1743–1757. [Google Scholar] [CrossRef]
- Liu, P.; Wei, Y.; Wang, Q.; Chen, Y.; Xie, J. Research on Post-Earthquake Landslide Extraction Algorithm Based on Improved U-Net Model. Remote Sens. 2020, 12, 894. [Google Scholar] [CrossRef] [Green Version]
- Thouret, J.C.; Kassouk, Z.; Gupta, A.; Liew, S.C.; Solikhin, A. Tracing the evolution of 2010 Merapi volcanic deposits (Indonesia) based on object-oriented classification and analysis of multi-temporal, very high resolution images. Remote Sens. Environ. 2015, 170, 350–371. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image seg-mentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 26, 11–21. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 26–29 July 2017; pp. 7263–7271. [Google Scholar]
- Chan, T.-H.; Jia, K.; Gao, S.; Lu, J.; Zeng, Z.; Ma, Y. PCANet: A Simple Deep Learning Baseline for Image Classification? IEEE Trans. Image Process. 2015, 24, 5017–5032. [Google Scholar] [CrossRef] [Green Version]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. Comput. Sci. 2014, 59, 62–78. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, Y.; Yang, F.; Chu, T.; Zhou, H. A Postearthquake Multiple Scene Recognition Model Based on Classical SSD Method and Transfer Learning. ISPRS Int. J. Geo-Inf. 2020, 9, 238. [Google Scholar] [CrossRef]
- Lei, T.; Zhang, Y.; Lv, Z.; Li, S.; Liu, S.; Nandi, A.K. Landslide Inventory Mapping From Bitemporal Images Using Deep Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2019, 16, 982–986. [Google Scholar] [CrossRef]
- Hong, Y.; Yi, M.; Wang, L.; Zhai, Y.; Wang, X. A landslide intelligent detection method based on CNN and RSG_R. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 6–9 August 2017; pp. 444–448. [Google Scholar]
- Ding, A.; Zhang, Q.; Zhou, X.; Dai, B. Automatic recognition of landslide based on CNN and texture change detection. In Proceedings of the Chinese Association of Automation, Jinan, China, 22–26 July 2016; pp. 444–448. [Google Scholar]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Wang, J.; Lei, D. Research on Landslide Detection Based on Deep Learning Target Detection Algorithm. Inf. Commun. 2019, 193, 16–18. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y. SSD: Single Shot MultiBox Detector. In Proceeding of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–14 October 2016; Springer: Cham, Switzerland; pp. 735–740. [Google Scholar]
- Wang, H.; Zhang, L.; Yin, K.; Luo, H.; Li, J. Landslide identification using machine learning. Geosci. Front. 2020, 28, 29–38. [Google Scholar] [CrossRef]
- He, K.; Georgia, G.; Piotr, D.; Ross, G. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 42, 386–397. [Google Scholar] [CrossRef] [PubMed]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Boston, MA, USA, 26–29 July 2015; pp. 1440–1448. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 26–29 July 2014; pp. 580–587. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 26–29 July 2017; pp. 2117–2125. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–29 July 2016; pp. 770–778. [Google Scholar]
- Xie, S.; Girshick, R.; Dollár, P.; Tu, Z.; He, K. Aggregated Residual Transformations for Deep Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 26–29 July 2017; pp. 1492–1500. [Google Scholar]
- Zimmermann, R.S.; Siems, J.N. Faster training of Mask R-CNN by focusing on instance boundaries. Comput. Vision Image Underst. 2019, 188, 102–110. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y. Study on Instance Segmentation Algorithms Based on Mask R-CNN. Master’s Thesis, Huazhong University of Science and Technology, Hubei, China, 2019. [Google Scholar]
- Ying-Dong, Q.; Cheng-Song, C.; San-Ben, C.; Jin-Quan, L. A fast subpixel edge detection method using Sobel-Zernike moments operator. Image Vis Comput. Image Vision Comput. 2005, 23, 11–17. [Google Scholar] [CrossRef]
- Garcia-Garcia, A.; Orts-Escolano, S.; Oprea, S.; Villena-Martinez, V.; Garcia-Rodriguez, J. A Review on Deep Learning Techniques Applied to Semantic Segmentation. arXiv 2017, arXiv:1704.06857. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer Vision, Cham, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | Output | ResNet-50 | ResNeXt-50 |
|---|---|---|---|
| Conv1 | , 64, stride2 | , 64, stride2 | |
| , max pool, stride2 | , max pool, stride2 | ||
| Conv2 | |||
| Conv3 | |||
| Conv4 | |||
| Conv5 | |||
| Global average pool 1000-d fc, softmax | Global average pool 1000-d fc, softmax | ||
| #params | |||
| FLOPs | |||
| Real Results | Landslides | Others | |
|---|---|---|---|
| Predicted Results | |||
| Landslides | True Positive (TP) | False Positive (FP) | |
| Others | False Negative (FN) | True Negative (TN) | |
| Name | Parameter |
|---|---|
| Learning Rate | 0.0001 |
| Batch Size | 4 |
| Epoch | 200 |
| Steps-Per-Epoch | 2440 |
| Precision/% | Recall/% | OA/% | mIoU/% | F1/% | |
|---|---|---|---|---|---|
| ResNeXt50 | 81.9 | 79.7 | 84.8 | 73.2 | 84.5 |
| ResNeXt50 + Improved FPN | 86.7 | 88.8 | 87.9 | 78.2 | 87.7 |
| ResNeXt50 + Improved FPN + | 95.8 | 93.1 | 94.7 | 89.6 | 94.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, P.; Wei, Y.; Wang, Q.; Xie, J.; Chen, Y.; Li, Z.; Zhou, H. A Research on Landslides Automatic Extraction Model Based on the Improved Mask R-CNN. ISPRS Int. J. Geo-Inf. 2021, 10, 168. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10030168
Liu P, Wei Y, Wang Q, Xie J, Chen Y, Li Z, Zhou H. A Research on Landslides Automatic Extraction Model Based on the Improved Mask R-CNN. ISPRS International Journal of Geo-Information. 2021; 10(3):168. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10030168
Chicago/Turabian StyleLiu, Peng, Yongming Wei, Qinjun Wang, Jingjing Xie, Yu Chen, Zhichao Li, and Hongying Zhou. 2021. "A Research on Landslides Automatic Extraction Model Based on the Improved Mask R-CNN" ISPRS International Journal of Geo-Information 10, no. 3: 168. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10030168