
How Image Acquisition Geometry of UAV Campaigns Affects the Derived Products and Their Accuracy in Areas with Complex Geomorphology



Abstract
:1. Introduction
2. Materials and Methods
2.1. Case Study
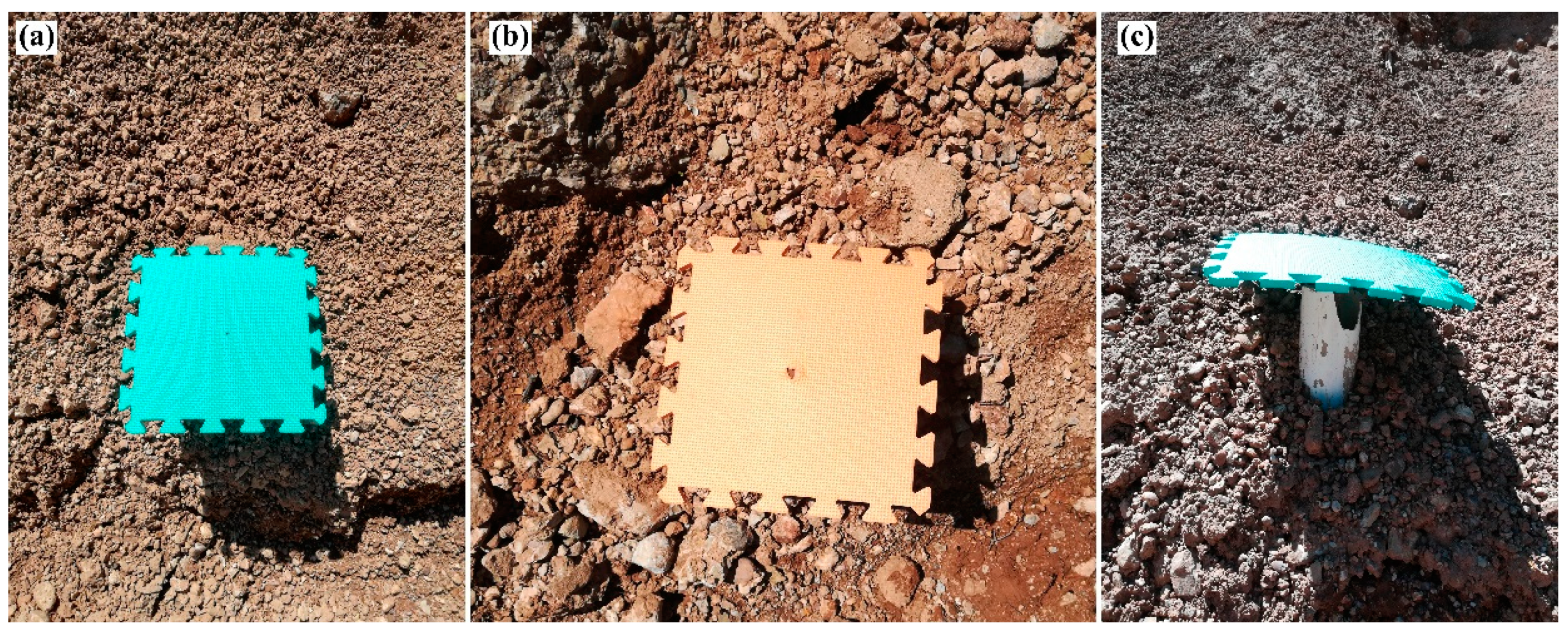
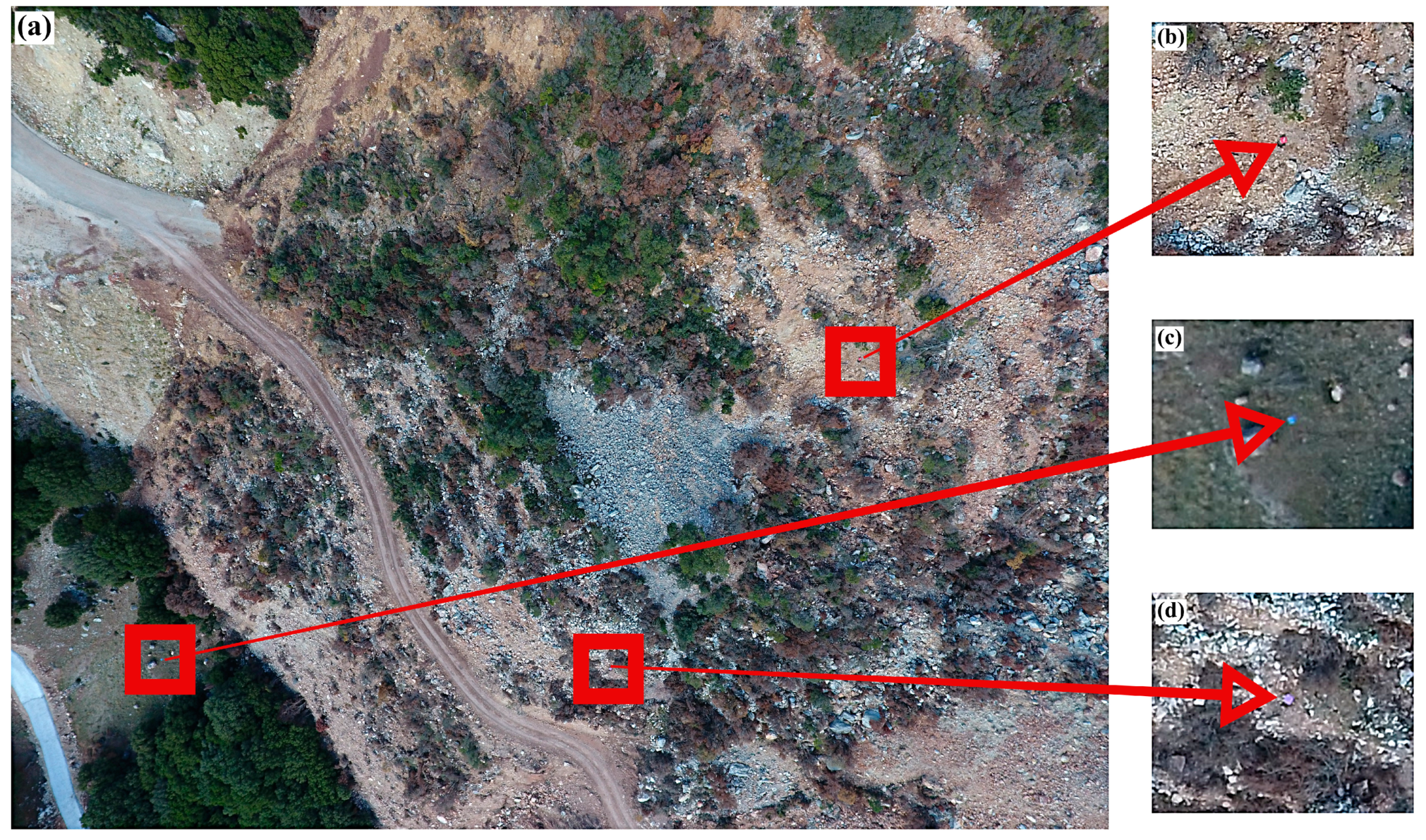
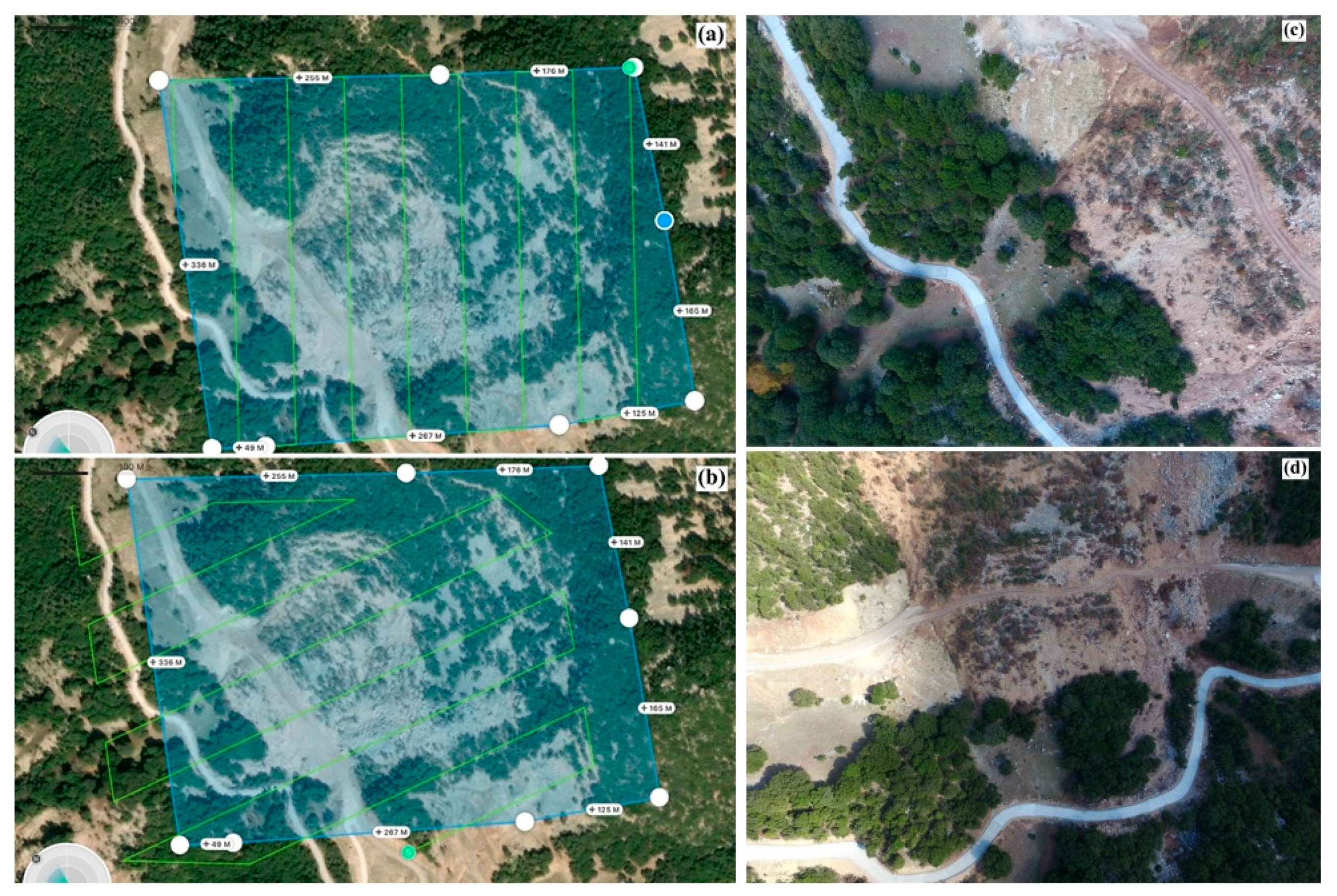
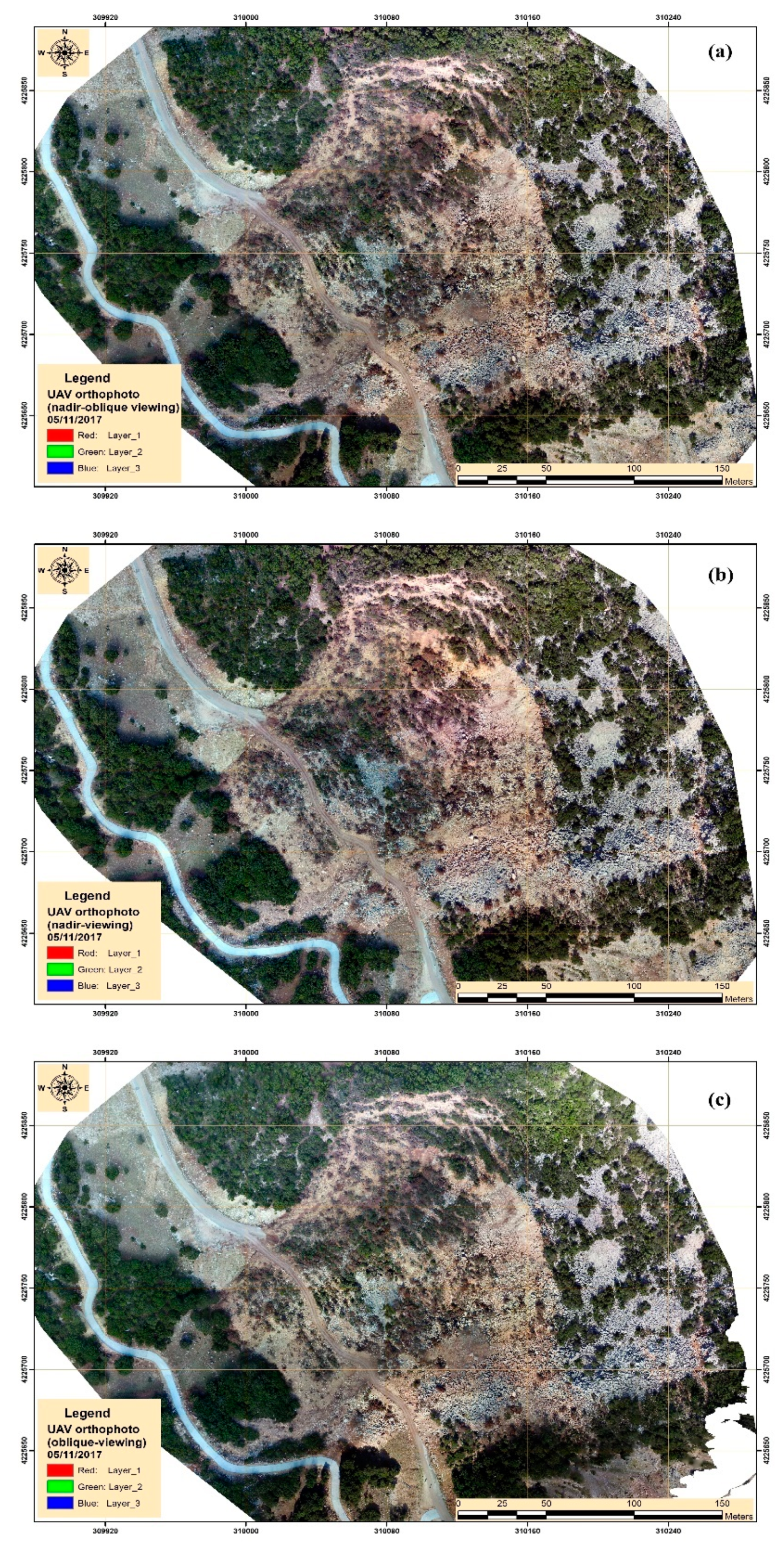
2.2. Equipment and Data Collection
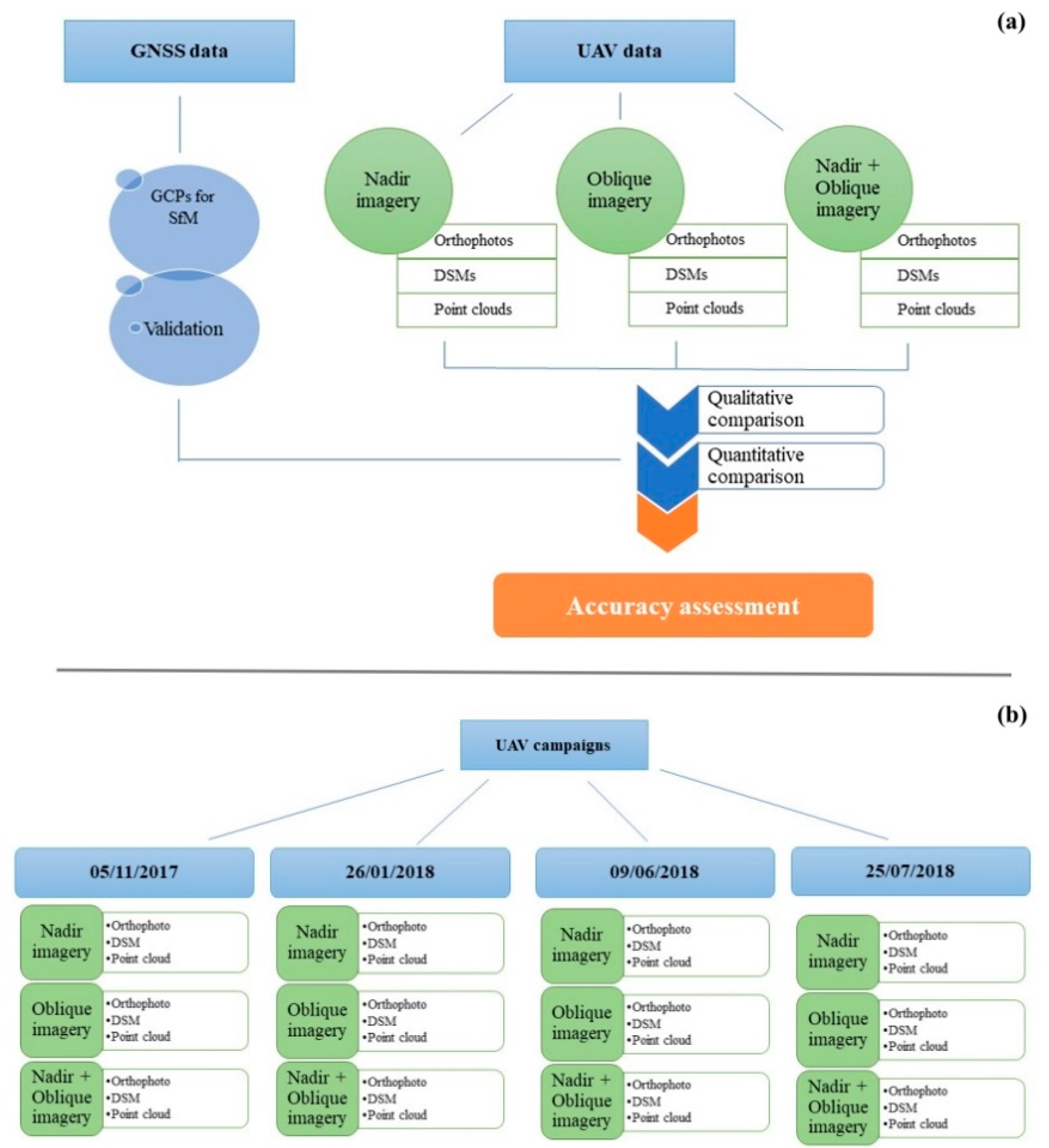
2.3. Processing Methodology
3. Results
3.1. Orthophotos Accuracy Assessment
3.2. Digital Surface Models (DSMs) Accuracy Assessment
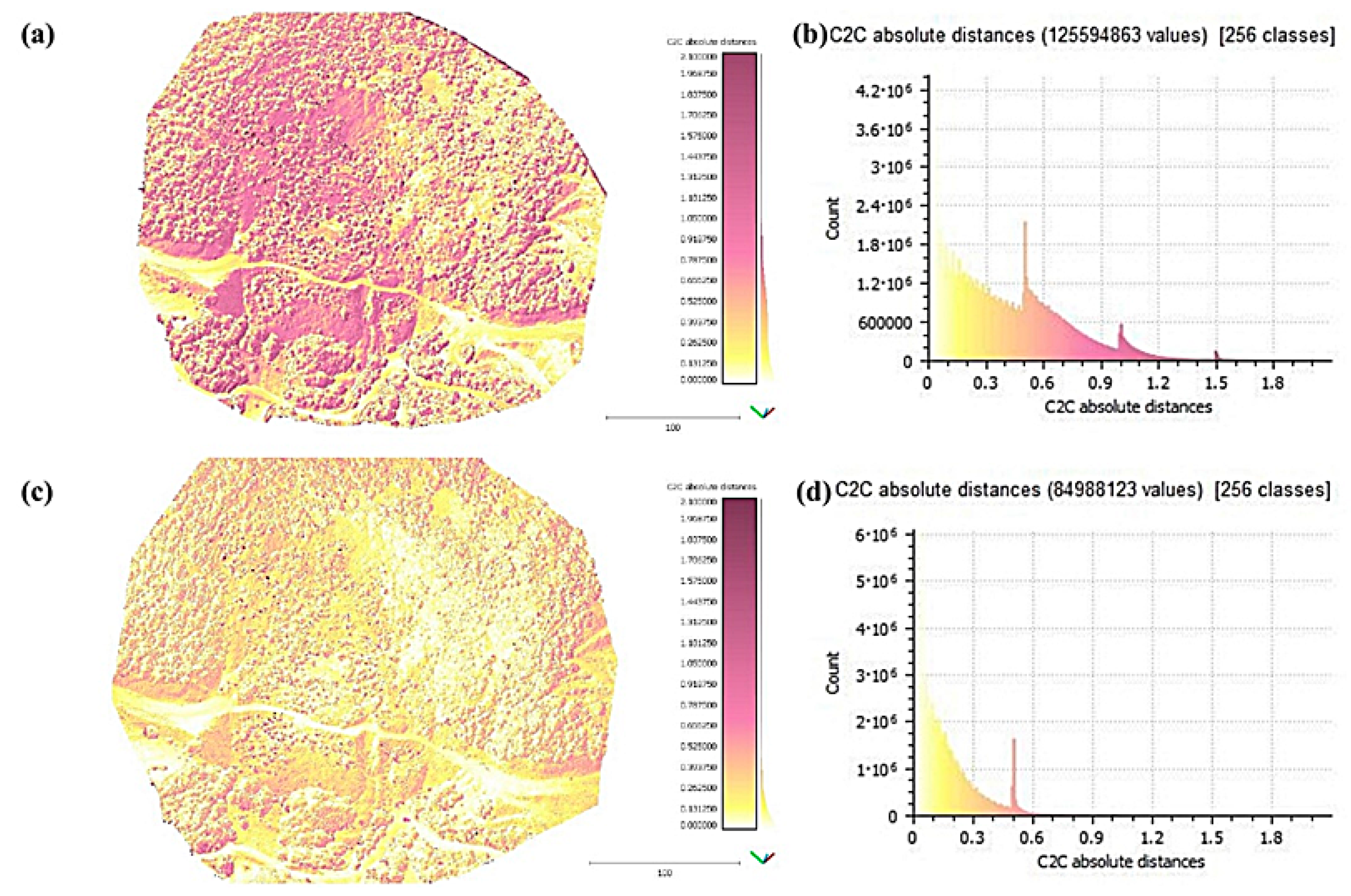
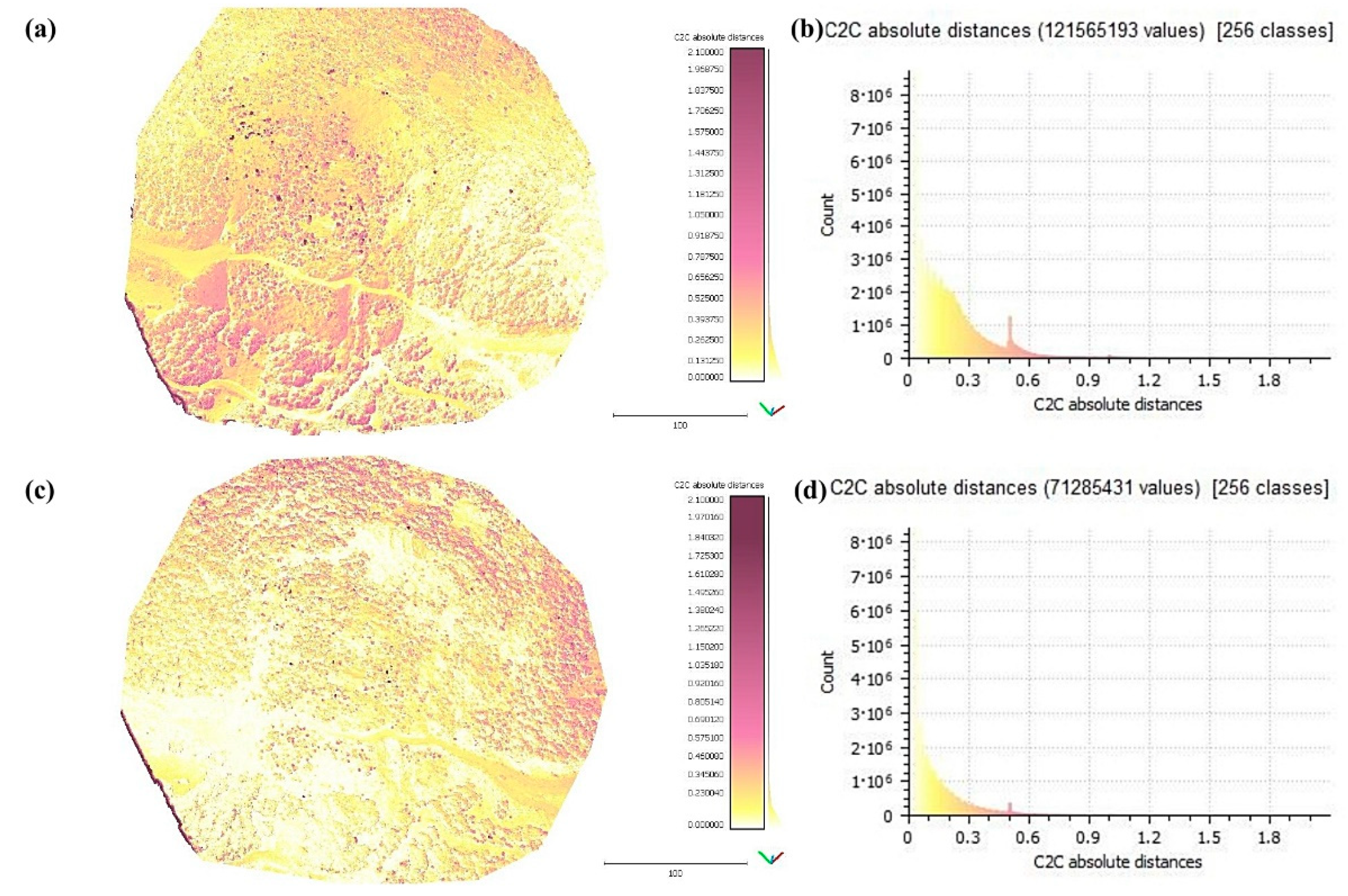
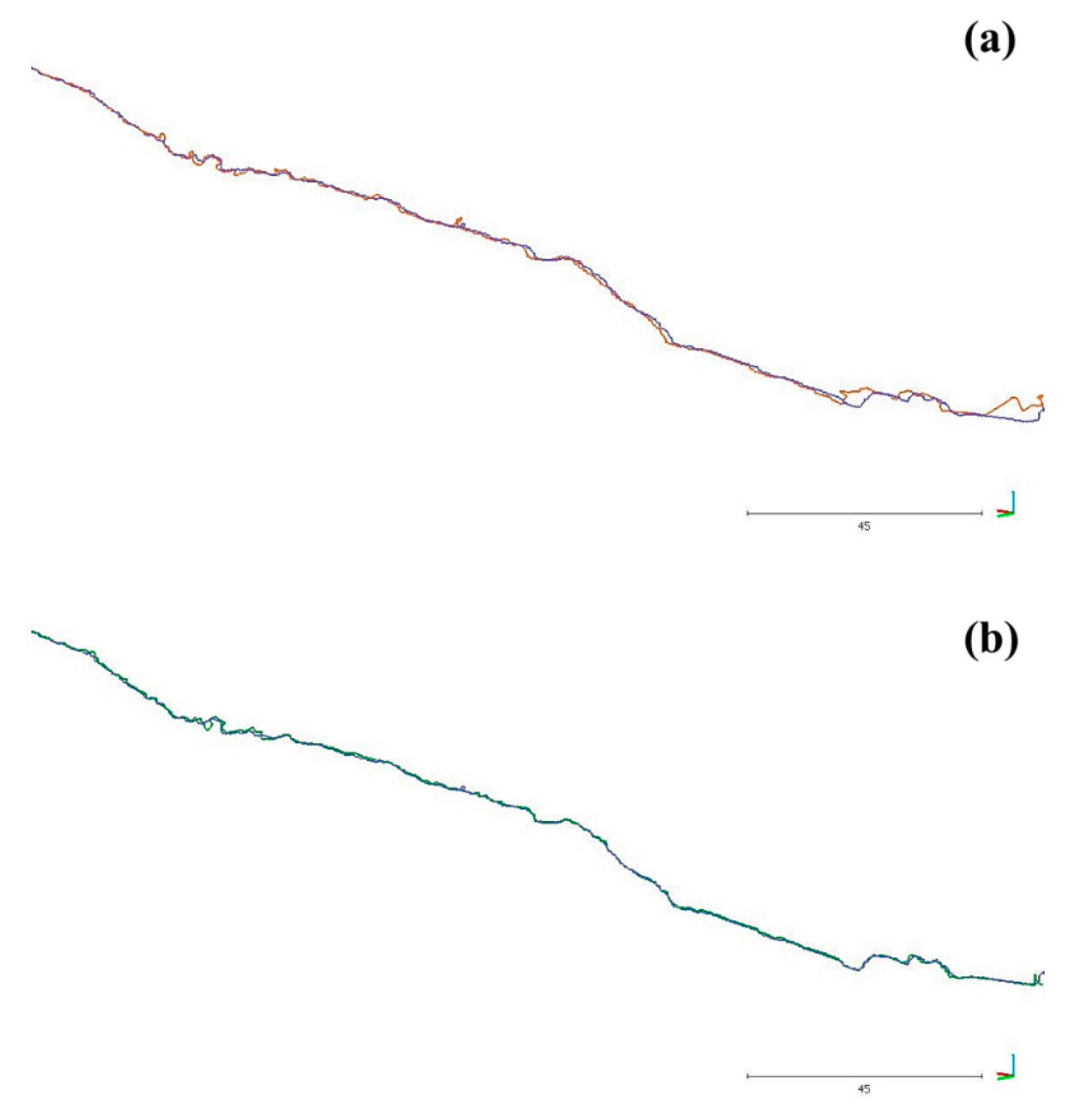
3.3. Point Clouds Accuracy Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding

Data Availability Statement
Conflicts of Interest
References
- Gobiet, A.; Kotlarski, S.; Beniston, M.; Heinrich, G.; Rajczak, J.; Stoffel, M. 21st century climate change in the European Alps—A review. Sci. Total Environ. 2014, 493, 1138–1151. [Google Scholar] [CrossRef]
- Sauerborn, R.; Ebi, K. Climate change and natural disasters—Integrating science and practice to protect health. Glob. Health Action 2012, 5, 19295. [Google Scholar] [CrossRef] [PubMed]
- Alcántara-Ayala, I.; Altan, O.; Baker, D.; Briceño, S.; Cutter, S.; Gupta, H.; Holloway, A.; Ismail-Zadeh, A.; Jiménez Díaz, V.; Johnston, D.; et al. Disaster Risks Research and Assessment to Promote Risk Reduction and Management; Ismail-Zadeh, A., Cutter, S., Eds.; ICSU: Paris, France, 2015. [Google Scholar]
- Themistocleous, K.; Danezis, C. Monitoring Cultural Heritage Sites Affected by Geo-Hazards Using In-Situ and SAR Data: The Choirokoitia Case Study. In Remote Sensing for Archaeology and Cultural Landscapes—Best Practices and Perspectives across Europe and Middle East; Hadjimitsis, D.G., Themisloceous, K., Cuca, B., Agapiou, A., Lysandrou, V., Lasaponara, R., Masini, N., Schreirer, G., Eds.; Springer Remote Sensing/Photogrammetry: Cham, Switzerland, 2020; ISBN 978-3-030-10978-3. [Google Scholar]
- Garnica-Peña, R.J.; Alcántara-Ayala, I. The use of UAVs for landslide disaster risk research and disaster risk management: A literature review. J. Mt. Sci. 2021, 18, 482–498. [Google Scholar] [CrossRef]
- Themistocleous, K. Themistocleous, K. The Use of UAVs for Cultural Heritage and Archaeology. In Remote Sensing for Archaeology and Cultural Landscapes—Best Practices and Perspectives across Europe and Middle East; Hadjimitsis, D.G., Themisloceous, K., Cuca, B., Agapiou, A., Lysandrou, V., Lasaponara, R., Masini, N., Schreirer, G., Eds.; Springer Remote Sensing/Photogrammetry: Cham, Switzerland, 2020; ISBN 978-3-030-10978-3. [Google Scholar]
- Themistocleous, K.; Hadjimitsis, D.G.; Michaelides, S.; Spizzichino, D.J.; Crosta, G.B.; Fernandez Merodo, J.A.; Bee, E. Best Practices for Monitoring, Mitigation and Preservation of Cultural Heritage Sites Affected By Geo-Hazards. In Proceedings of the EGU2018, Vienna, Austria, 8–13 April 2018; Volume 20. [Google Scholar]
- Nikolakopoulos, K.G.; Soura, K.; Koukouvelas, I.K.; Argyropoulos, N.G. UAV vs. classical aerial photogrammetry for archaeological studies. J. Arch. Sci. Rep. 2017, 14, 758–773. [Google Scholar] [CrossRef]
- Koeva, M.; Muneza, M.; Gevaert, C.; Gerke, M.; Nex, F. Using UAVs for map creation and updating. A case study in Rwanda. Surv. Rev. 2018, 50, 312–325. [Google Scholar] [CrossRef] [Green Version]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Piras, M.; Taddia, G.; Forno, M.G.; Gattiglio, M.; Aicardi, I.; Dabove, P.; Lo Russo, S.; Lingua, A. Detailed geological mapping in mountain areas using an unmanned aerial vehicle: Application to the Rodoretto Valley, NW Italian Alps. Geomat. Nat. Hazards Risk 2017, 8, 137–149. [Google Scholar] [CrossRef]
- Themistocleous, K. The Use of UAVs to Monitor Archeological Sites: The Case Study of Choirokoitia within the PROTHEGO Project. In Proceedings of the Fifth International Conference on Remote Sensing and Geo-information of Environment, Paphos, Cyprus, 20–23 March 2017. [Google Scholar]
- Gao, M.; Xu, X.; Klinger, Y.; van der Woerd, J.; Tapponnier, P. High-resolution mapping based on an Unmanned Aerial Vehicle (UAV) to capture paleoseismic offsets along the Altyn-Tagh fault, China. Sci. Rep. 2017, 7, 8281. [Google Scholar] [CrossRef]
- Baldi, P.; Coltelli, M.; Fabris, M.; Marsella, M.; Tommasi, P. High precision photogrammetry for monitoring the evolution of the NW flank of Stromboli volcano during and after the 2002–2003 eruption. Bull. Volcanol. 2008, 70, 703–715. [Google Scholar] [CrossRef]
- Rau, J.Y.; Jhan, J.P.; Lo, C.F.; Lin, Y.S. Landslide mapping using imagery acquired by a fixed-wing UAV. Int. Arch. Photogramm. 2012, 38, 195–200. [Google Scholar] [CrossRef] [Green Version]
- Rossi, G.; Tanteri, L.; Tofani, V.; Vannocci, P.; Moretti, S.; Casagli, N. Multitemporal UAV surveys for landslide mapping and characterization. Landslides 2018, 15, 1045–1052. [Google Scholar] [CrossRef] [Green Version]
- Kyriou, A.; Nikolakopoulos, K.; Koukouvelas, I.; Lampropoulou, P. Repeated UAV Campaigns, GNSS Measurements, GIS, and Petrographic Analyses for Landslide Mapping and Monitoring. Minerals 2021, 11, 300. [Google Scholar] [CrossRef]
- Themistocleous, K.; Danezis, C. Monitoring cultural heritage sites affected by geohazards. In Earth Resources and Environmental Remote Sensing/GIS Applications IX; International Society for Optics and Photonics: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Themistocleous, K.; Danezis, C.; Mendonidis, E.; Lymperopoulou, E. Monitoring ground deformation of cultural heritage sites using UAVs and geodetic techniques: The case study of Choirokoitia, JPI PROTHEGO project. In Earth Resources and Environmental Remote Sensing/GIS Applications VIII, Proceedings of the SPIE Remote Sensing Conference, Warsaw, Poland, 11–14 September 2017; SPIE: Washington, DC, USA, 2017; Volume 10428. [Google Scholar] [CrossRef]
- Amrullah, C.; Suwardhi, D.; Meilano, I. Product accuracy effect of oblique and vertical non-metric digital camera utilization in UAV-photogrammetry to determine fault plane. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 41–48. [Google Scholar] [CrossRef] [Green Version]
- Meinen, B.U.; Robinson, D.T. Mapping erosion and deposition in an agricultural landscape: Optimization of UAV image acquisition schemes for SfM-MVS. Remote Sens. Environ. 2020, 239, 111666. [Google Scholar] [CrossRef]
- Casella, V.; Franzini, M. Modelling steep surfaces by various configurations of nadir and oblique photogrammetry. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 175–182. [Google Scholar] [CrossRef] [Green Version]
- Rossi, P.; Mancini, F.; Dubbini, M.; Mazzone, F.; Capra, A. Combining nadir and oblique UAV imagery to reconstruct quarry topography: Methodology and feasibility analysis. Eur. J. Remote Sens. 2017, 50, 211–221. [Google Scholar] [CrossRef] [Green Version]
- Lingua, A.; Noardo, F.; Spanò, A.; Sanna, S.; Matrone, F. 3D model generation using oblique images acquired by UAV. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 107–115. [Google Scholar] [CrossRef] [Green Version]
- Vacca, G.; Dessì, A.; Sacco, A. The Use of Nadir and Oblique UAV Images for Building Knowledge. ISPRS Int. J. Geo-Inf. 2017, 6, 393. [Google Scholar] [CrossRef] [Green Version]
- Tu, Y.-H.; Johansen, K.; Aragon, B.; Stutsel, B.M.; Angel, Y.; Camargo, O.A.L.; Al-Mashharawi, S.K.M.; Jiang, J.; Ziliani, M.G.; McCabe, M.F. Combining Nadir, Oblique, and Façade Imagery Enhances Reconstruction of Rock Formations Using Unmanned Aerial Vehicles. IEEE Trans. Geosci. Remote Sens. 2021, 1–13. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the Georeferencing Accuracy of a Photogrammetric Model Using a Quadrocopter with Onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry Using UAV-Mounted GNSS RTK: Georeferencing Strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Teppati Losè, L.; Chiabrando, F.; Giulio Tonolo, F. Boosting the Timeliness of UAV Large Scale Mapping. Direct Georeferencing Approaches: Operational Strategies and Best Practices. ISPRS Int. J. Geo-Inf. 2020, 9, 578. [Google Scholar] [CrossRef]
- Eltner, A.; Sofia, G. Chapter 1—Structure from motion photogrammetric technique. In Developments in Earth Surface Processes; Tarolli, P., Mudd, S.M., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; Volume 23, pp. 1–24. [Google Scholar]
- Westoby, M.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Micheletti, N.; Chandler, J.; Lane, S.N. Chapter 2—Structure from motion (SFM) photogrammetry. In Geomorphological Techniques; Section 2.2; British Society for Geomorphology: London, UK, 2015. [Google Scholar]
- Photoscan Manual. Available online: http://www.agisoft.com/pdf/photoscan-pro_1_1_en.pdf (accessed on 27 February 2021).
- Nikolakopoulos, K.; Kyriou, A.; Koukouvelas, I.; Zygouri, V.; Apostolopoulos, D. Combination of Aerial, Satellite, and UAV Photogrammetry for Mapping the Diachronic Coastline Evolution: The Case of Lefkada Island. ISPRS Int. J. Geo-Inf. 2019, 8, 489. [Google Scholar] [CrossRef] [Green Version]
- ArcMap (Mean Center). Available online: https://desktop.arcgis.com/en/arcmap/latest/tools/spatial-statistics-toolbox/mean-center.htm (accessed on 2 March 2021).
- Mitchell, A. The ESRI Guide to GIS Analysis, 1st ed.; ESRI Press: Redlands, CA, USA, 2005; Volume 2. [Google Scholar]
- ArcMap (Near Analysis). Available online: https://desktop.arcgis.com/en/arcmap/10.3/tools/analysis-toolbox/near.htm (accessed on 2 March 2021).
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data Principles and Practices; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.J.; Rumbao, I.C.; Berrocal, J.A.B.; Porras, A.G.-F. Positional Quality Assessment of Orthophotos Obtained from Sensors Onboard Multi-Rotor UAV Platforms. Sensors 2014, 14, 22394–22407. [Google Scholar] [CrossRef] [PubMed]
- Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. Accuracy of Digital Surface Models and Orthophotos Derived from Unmanned Aerial Vehicle Photogrammetry. J. Surv. Eng. 2017, 143, 04016025. [Google Scholar] [CrossRef]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy Assessment of Digital Surface Models from Unmanned Aerial Vehicles’ Imagery on Glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S.; Pinkerton, H.; Ball, M. Oblique photogrammetry with visible and thermal images of active lava flows. Bull. Volcanol. 2006, 69, 105–108. [Google Scholar] [CrossRef]
- James, M.R.; Pinkerton, H.; Robson, S. Image-based measurement of flux variation in distal regions of active lava flows. Geochem. Geophys. Geosyst. 2007, 8, Q03006. [Google Scholar] [CrossRef] [Green Version]
- Aicardi, I.; Chiabrando, F.; Grasso, N.; Lingua, A.M.; Noardo, F.; Spanò, A. UAV photogrammetry with oblique images: First analysis on data acquisition and processing. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. In Proceedings of the XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016; Volume XLI-B1. [Google Scholar]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SfM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef] [Green Version]
- Mosbrucker, A.R.; Major, J.J.; Spicer, K.R.; Pitlick, J. Camera system considerations for geomorphic applications of SfM photogrammetry. Earth Surf. Process. Landf. 2017, 42, 969–986. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Sammartano, G.; Chiabrando, F.; Spanò, A. Oblique images and direct photogrammetry with a fixed wing platform: First test and results in Hierapolis of Phrygia (TK). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 75–82. [Google Scholar] [CrossRef]
- Alganci, U.; Besol, B.; Sertel, E. Accuracy Assessment of Different Digital Surface Models. ISPRS Int. J. Geo-Inf. 2018, 7, 114. [Google Scholar] [CrossRef] [Green Version]
- Wessel, B.; Huber, M.; Wohlfart, C.; Marschalk, U.; Kosmann, D.; Roth, A. Accuracy assessment of the global TanDEM-X Digital Elevation Model with GPS data. ISPRS J. Photogramm. Remote Sens. 2018, 139, 171–182. [Google Scholar] [CrossRef]
- Elkhrachy, I. Vertical accuracy assessment for SRTM and ASTER Digital Elevation Models: A case study of Najran city, Saudi Arabia. Ain Shams Eng. J. 2018, 9, 1807–1817. [Google Scholar] [CrossRef]
- Hobi, M.L.; Ginzler, C. Accuracy Assessment of Digital Surface Models Based on WorldView-2 and ADS80 Stereo Remote Sensing Data. Sensors 2012, 12, 6347–6368. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahmad Fuad, N.; Yusoff, A.R.; Ismail, Z.; Majid, Z. Comparing the performance of point cloud registration methods for landslide monitoring using mobile laser scanning data. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, International Conference on Geomatics and Geospatial Technology (GGT 2018), Kuala Lumpur, Malaysia, 3–5 September 2018; Volume XLII-4/W9. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Campaign | Date |
|---|---|
| 1 | 5 November 2017 |
| 2 | 26 January 2018 |
| 3 | 9 June 2018 |
| 4 | 25 July 2018 |
| Flight Parameters | |
|---|---|
| UAV altitude (m) | 110 |
| GSD (cm) | 4 |
| Along the track overlap % | 90 |
| Across the track overlap % | 75 |
| Campaign | Subcategories | Number of Photos |
|---|---|---|
| 1,2,3,4 | Nadir imagery | 189 |
| Oblique imagery | 174 | |
| Nadir + Oblique imagery | 363 |
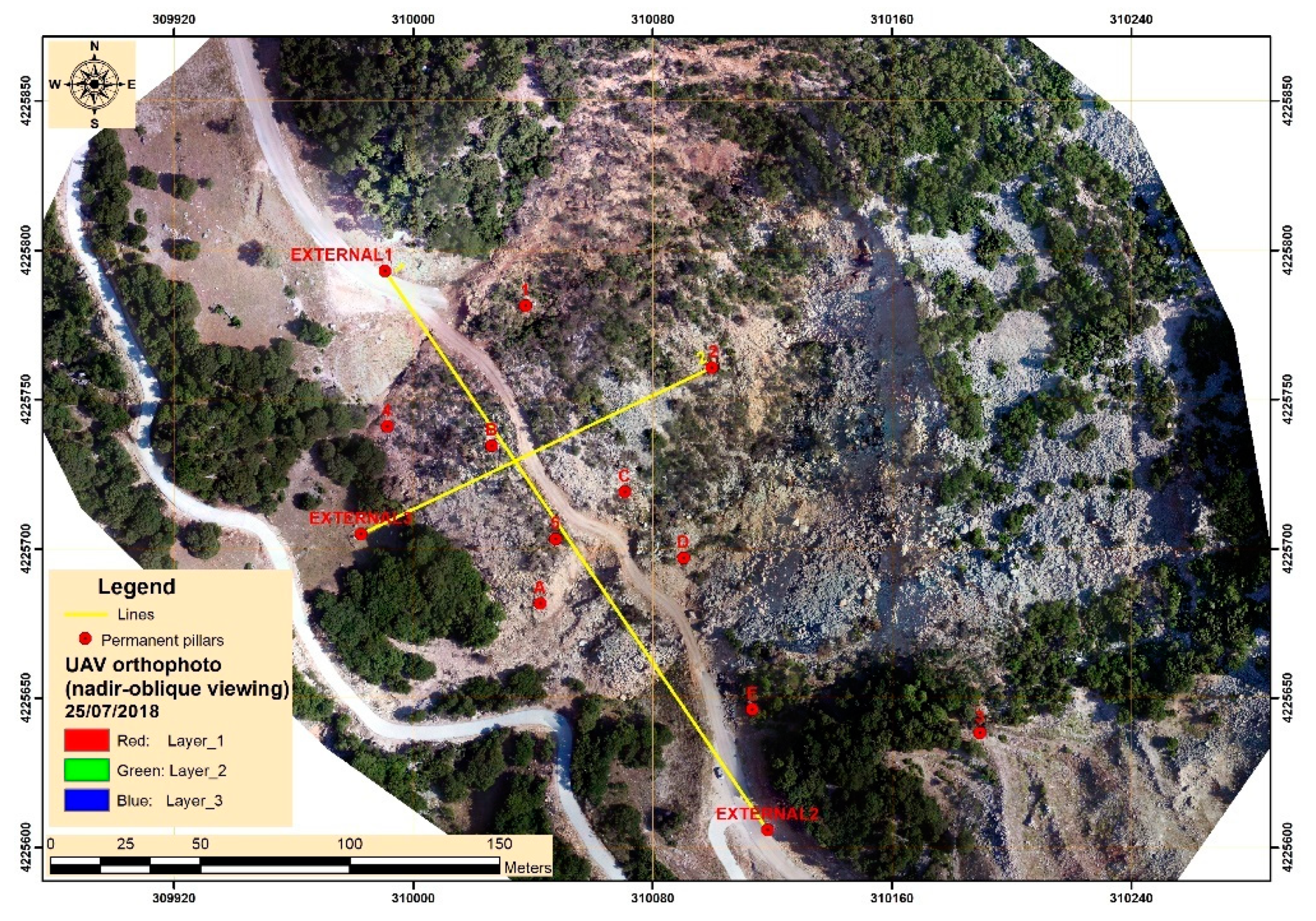
| a/a | Permanent Pillar | x-Coordinate | y-Coordinate | z-Coordinate |
|---|---|---|---|---|
| 1 | External 1 | 309990.459 | 4225793.033 | 716.803 |
| 2 | External 2 | 310118.355 | 4225605.885 | 720.698 |
| 3 | External 3 | 309982.350 | 4225704.945 | 685.452 |
| 4 | C | 310070.577 | 4225719.056 | 725.759 |
| 5 | 2 | 310099.674 | 4225760.662 | 738.102 |
| 6 | 3 | 310189.374 | 4225638.392 | 759.777 |
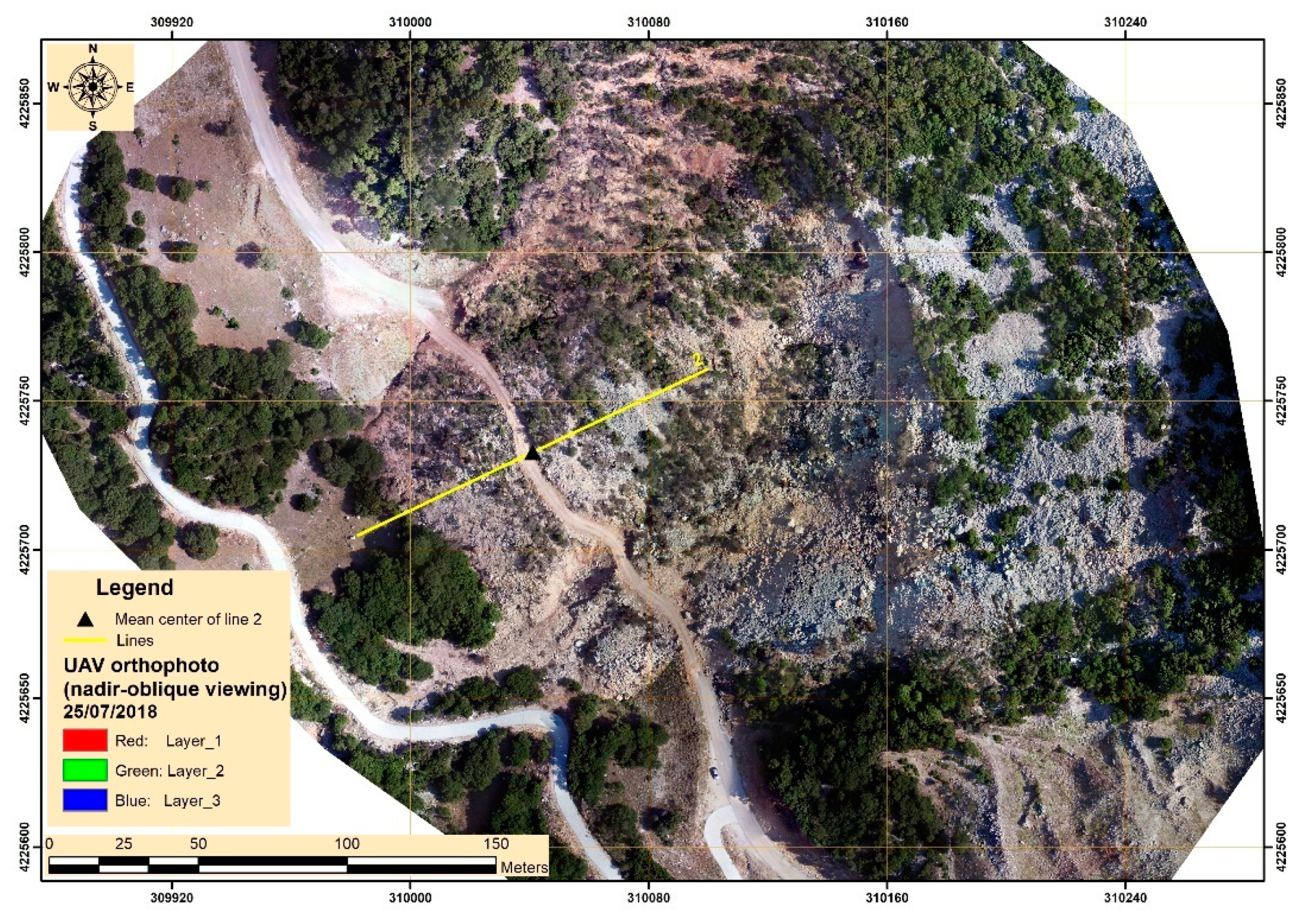
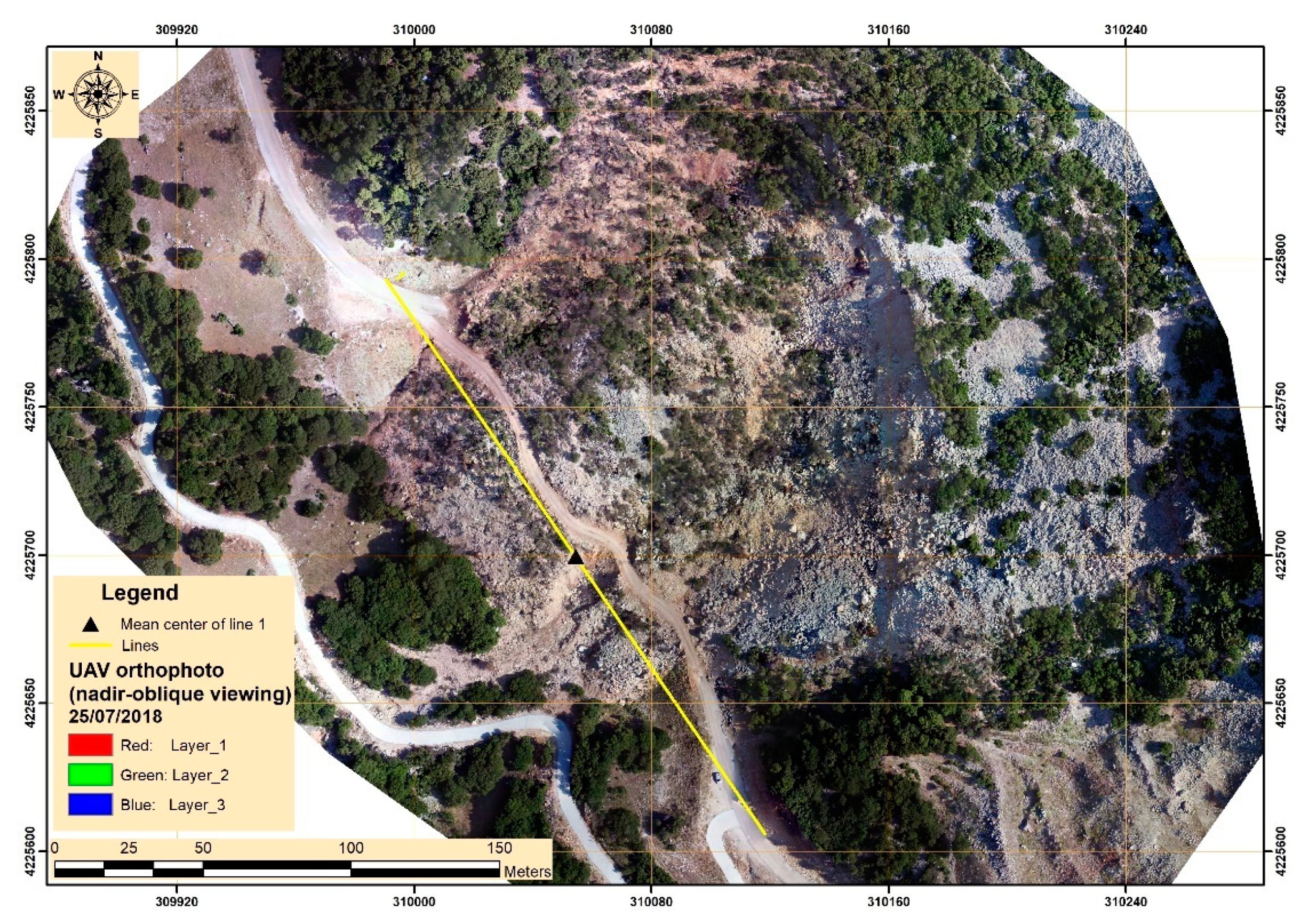
| Campaigns | Subcategories | Length Line 1 (m) | Difference (m) | Difference % | Length Line 2 (m) | Difference (m) | Difference % |
|---|---|---|---|---|---|---|---|
| Reference line from x-y coordinates | - | 226.676 | - | - | 129.881 | - | - |
| 1 5 November 2017 | Nadir + Oblique imagery | 227.176 | −0.500 | −0.22% | 129.901 | 0.020 | 0.02% |
| Nadir imagery | 227.13 | −0.454 | −0.20% | 129.684 | 0.197 | 0.15% | |
| Oblique imagery | 226.921 | −0.245 | −0.11% | 129.919 | −0.038 | −0.03% | |
| 2 9 June 2018 | Nadir + Oblique imagery | 226.734 | −0.058 | −0.03% | 129.725 | 0.156 | 0.12% |
| Nadir imagery | 226.933 | −0.257 | −0.11% | 129.55 | 0.331 | 0.25% | |
| Oblique imagery | 226.745 | −0.069 | −0.03% | 129.937 | −0.056 | −0.04% | |
| 3 25 July 2018 | Nadir + Oblique imagery | 226.419 | 0.257 | 0.11% | 129.748 | 0.133 | 0.10% |
| Nadir imagery | 226.813 | −0.137 | −0.06% | 129.741 | 0.140 | 0.11% | |
| Oblique imagery | 226.462 | 0.214 | 0.09% | 130.031 | −0.150 | −0.12% | |
| 4 26 January 2018 | Nadir + Oblique imagery | 226.761 | −0.085 | −0.04% | 129.851 | −0.030 | −0.02% |
| Nadir imagery | 226.68 | −0.004 | 0.00% | 129.921 | −0.040 | −0.03% | |
| Oblique imagery | 226.597 | 0.079 | 0.03% | 129.932 | −0.051 | −0.04% |
| Campaign | Subcategories | Near Distance (m) Mean Center of Line 1 | Near Distance (m) Mean Center Line 2 |
|---|---|---|---|
| 1 5 November 2017 | Nadir imagery | 0.117 | 0.231 |
| Oblique imagery | 0.072 | 0.108 | |
| Nadir + Oblique imagery | 0.067 | 0.078 | |
| 2 9 June 2018 | Nadir imagery | 0.023 | 0.095 |
| Oblique imagery | 0.015 | 0.049 | |
| Nadir + Oblique imagery | 0.013 | 0.112 | |
| 3 25 July 2018 | Nadir imagery | 0.345 | 0.194 |
| Oblique imagery | 0.179 | 0.183 | |
| Nadir + Oblique imagery | 0.152 | 0.082 | |
| 4 26 January 2018 | Nadir imagery | 0.161 | 0.198 |
| Oblique imagery | 0.051 | 0.081 | |
| Nadir + Oblique imagery | 0.048 | 0.095 |
| Campaign | Subcategories | RMSE (m) |
|---|---|---|
| 1 5 November 2017 | Nadir imagery | 0.34 |
| Oblique imagery | 0.28 | |
| Nadir + Oblique imagery | 0.21 | |
| 2 9 June 2018 | Nadir imagery | 0.38 |
| Oblique imagery | 0.26 | |
| Nadir + Oblique imagery | 0.14 | |
| 3 25 July 2018 | Nadir imagery | 0.32 |
| Oblique imagery | 0.27 | |
| Nadir + Oblique imagery | 0.17 | |
| 4 26 January 2018 | Nadir imagery | 0.34 |
| Oblique imagery | 0.26 | |
| Nadir + Oblique imagery | 0.19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyriou, A.; Nikolakopoulos, K.; Koukouvelas, I. How Image Acquisition Geometry of UAV Campaigns Affects the Derived Products and Their Accuracy in Areas with Complex Geomorphology. ISPRS Int. J. Geo-Inf. 2021, 10, 408. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10060408
Kyriou A, Nikolakopoulos K, Koukouvelas I. How Image Acquisition Geometry of UAV Campaigns Affects the Derived Products and Their Accuracy in Areas with Complex Geomorphology. ISPRS International Journal of Geo-Information. 2021; 10(6):408. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10060408
Chicago/Turabian StyleKyriou, Aggeliki, Konstantinos Nikolakopoulos, and Ioannis Koukouvelas. 2021. "How Image Acquisition Geometry of UAV Campaigns Affects the Derived Products and Their Accuracy in Areas with Complex Geomorphology" ISPRS International Journal of Geo-Information 10, no. 6: 408. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10060408