
SPPD: A Novel Reassembly Method for 3D Terracotta Warrior Fragments Based on Fracture Surface Information

 ,
,
Abstract
:1. Introduction
- A novel reassembly method for 3D Terracotta Warrior fragments is proposed;
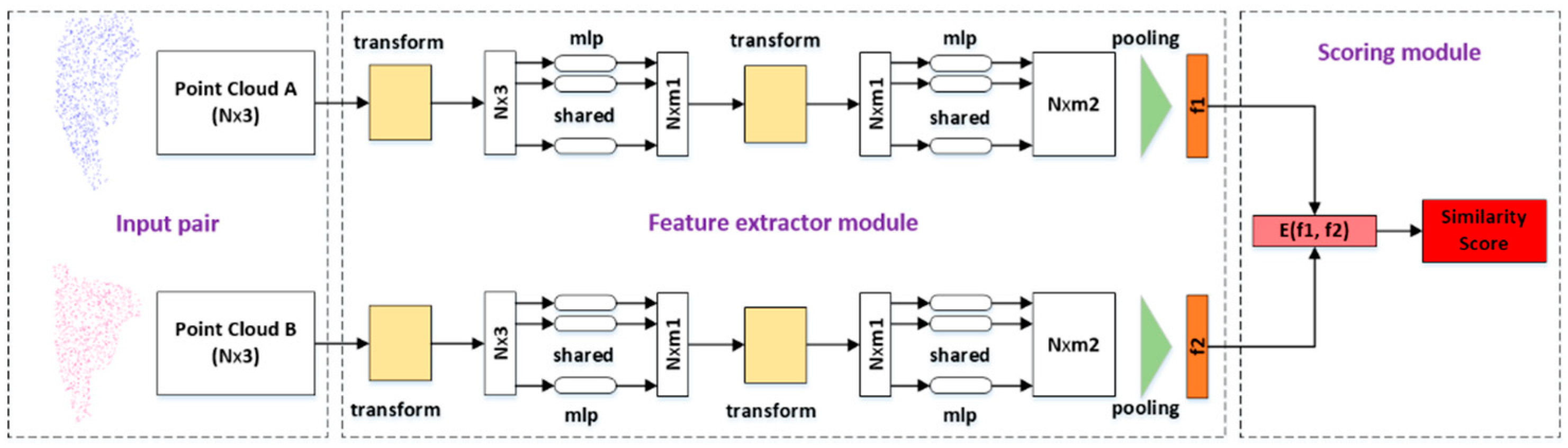
- A deep network called SiamesePointNet to evaluate the similarity of fracture surfaces is proposed;
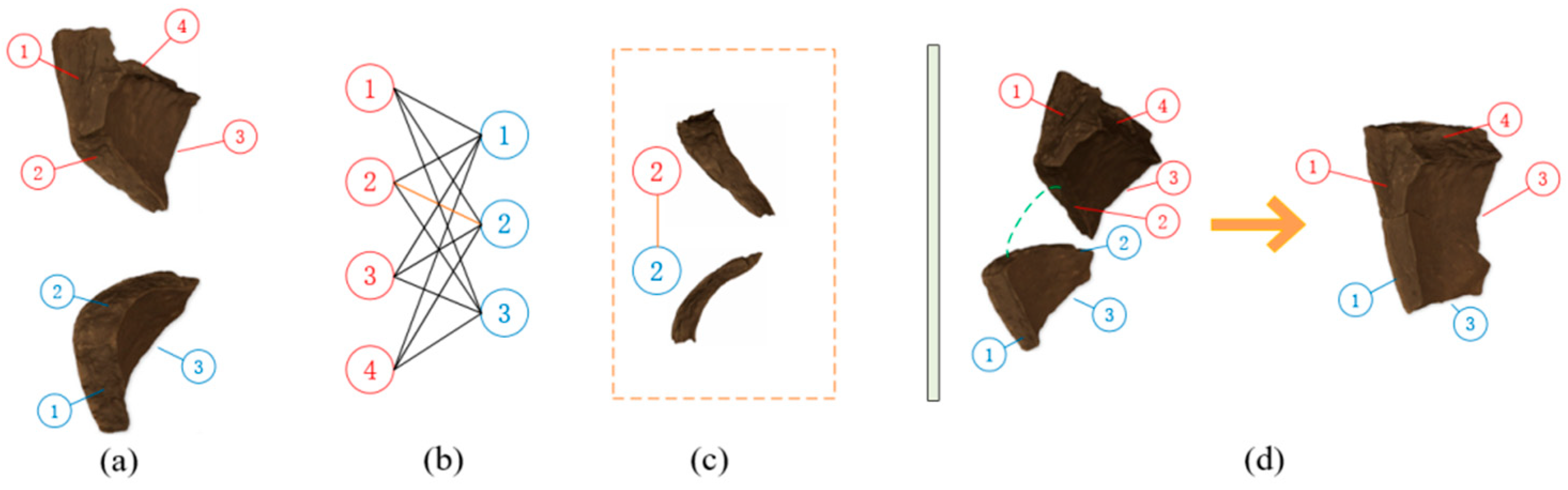
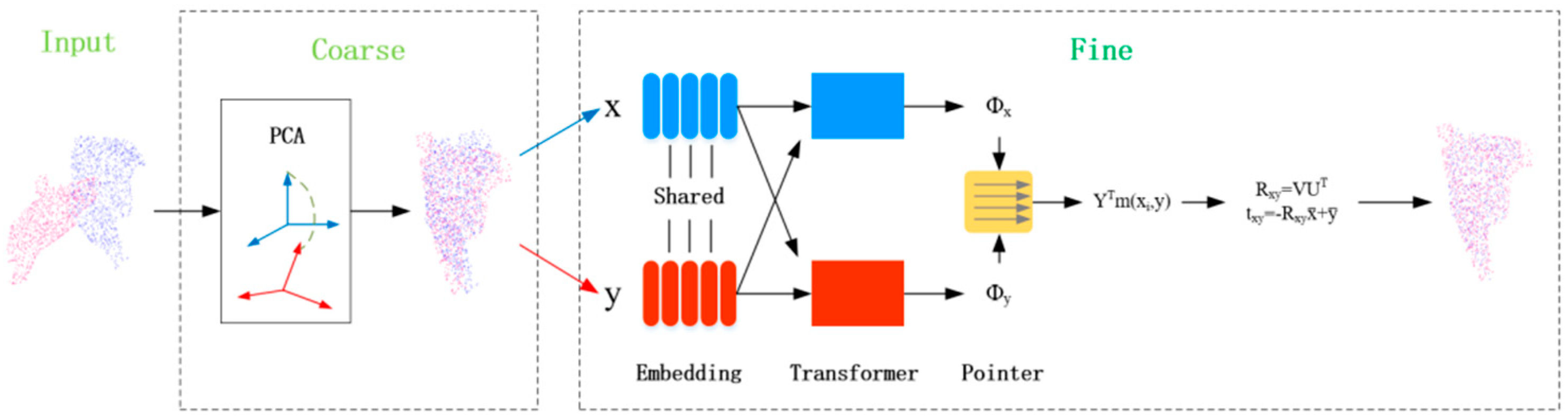
- A coarse-to-fine registration method combining PCA and DCP is proposed;
- A series of real-world-based experiments have been conducted to prove the validity of the proposed method.
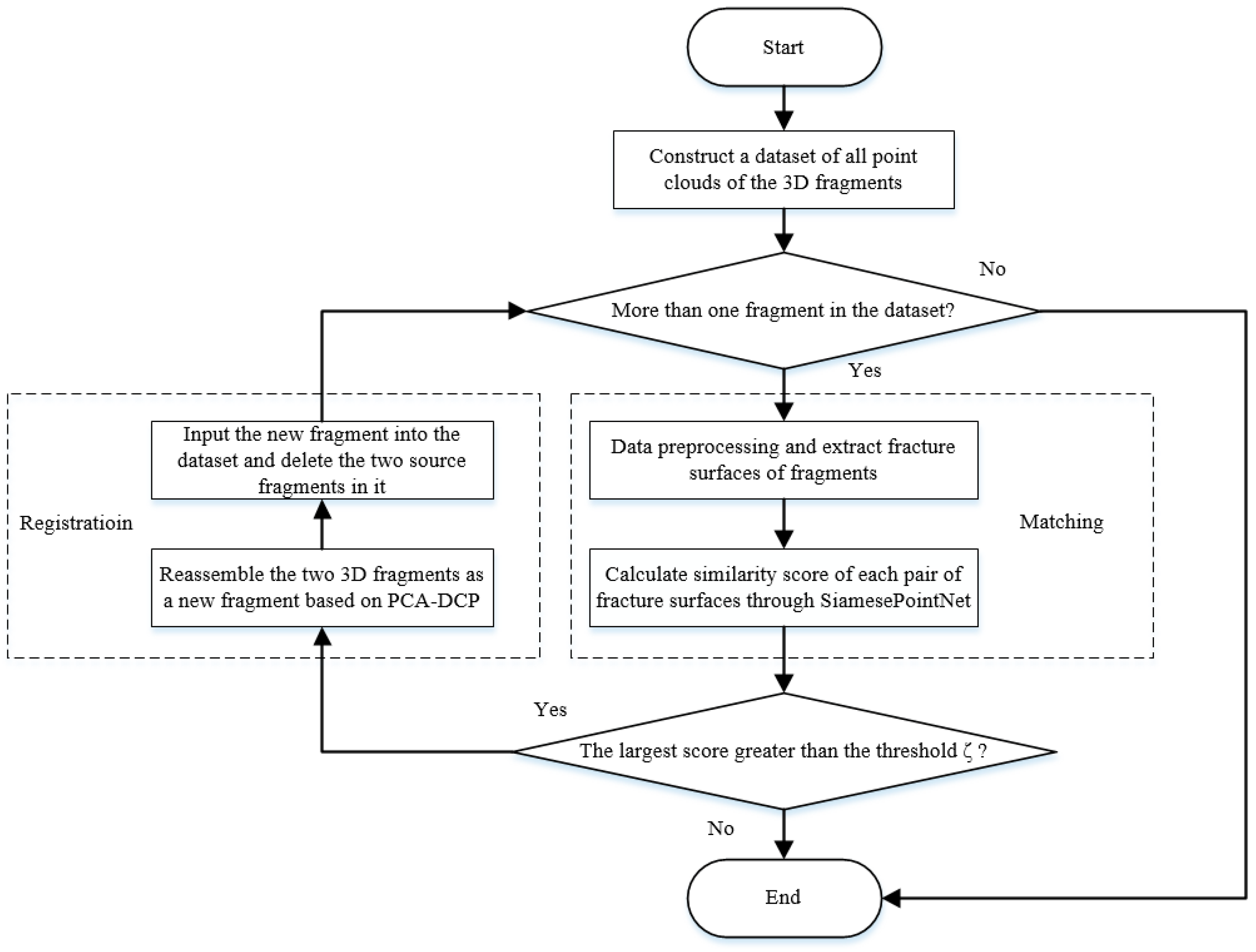
2. Materials and Methods
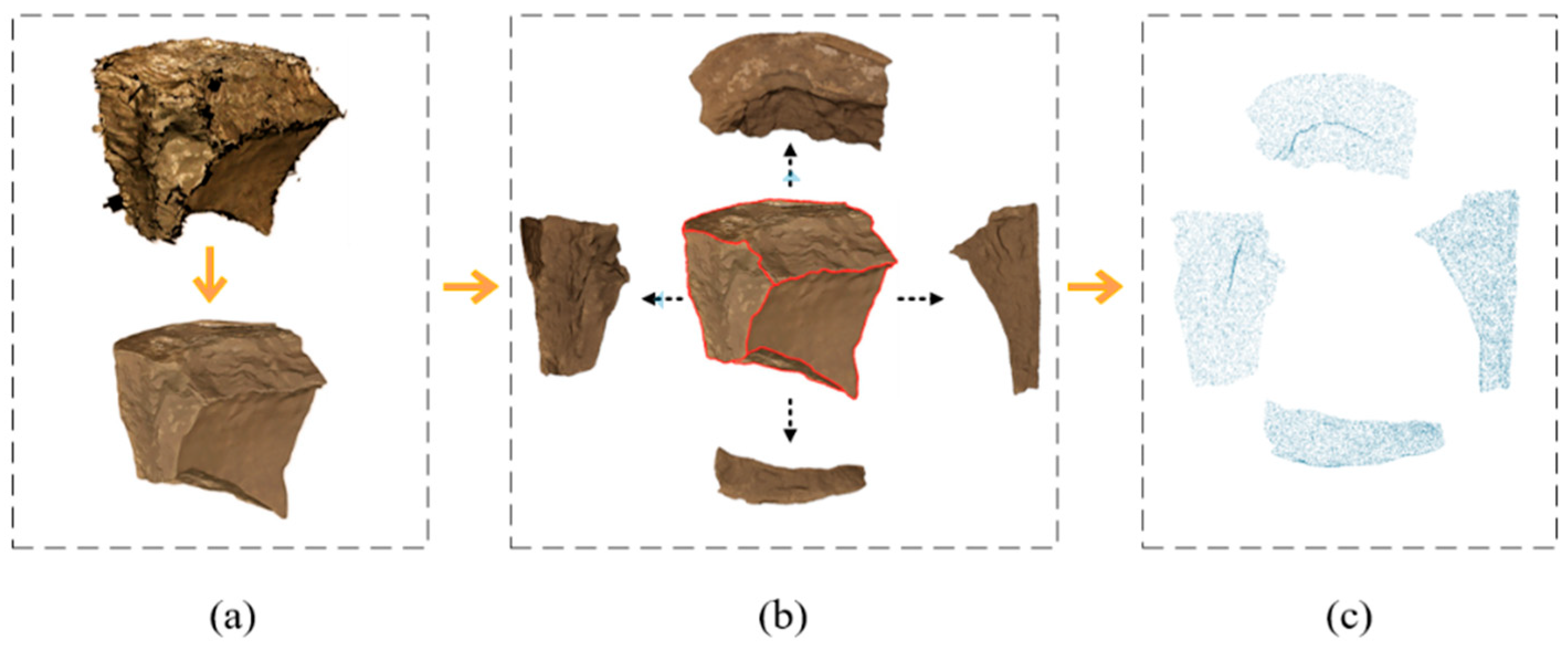
2.1. Data Preprocessing and Fracture Surfaces Extraction
2.2. Network Architecture for Matching Stage
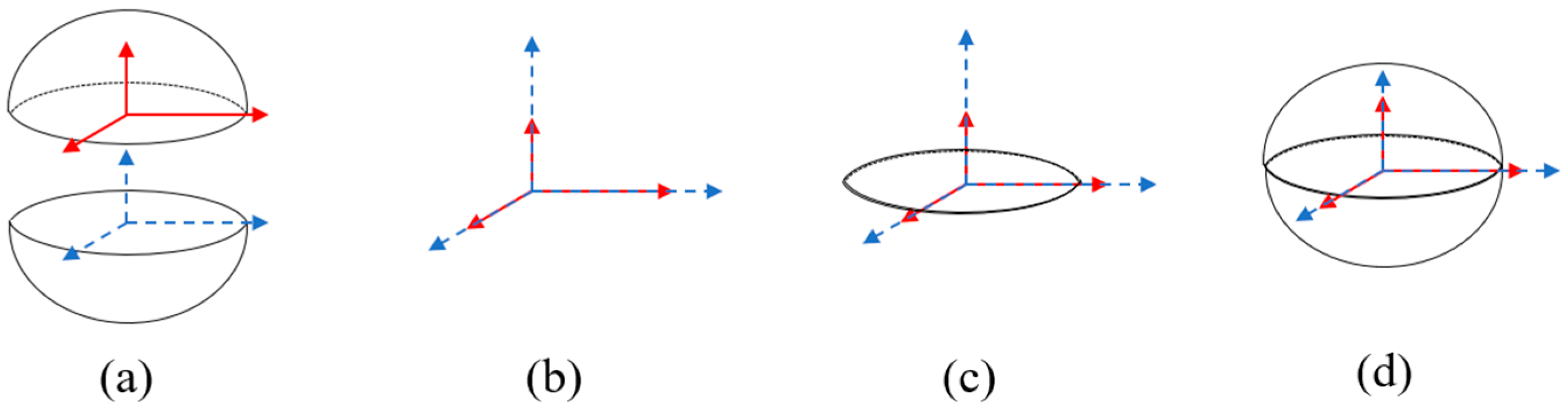
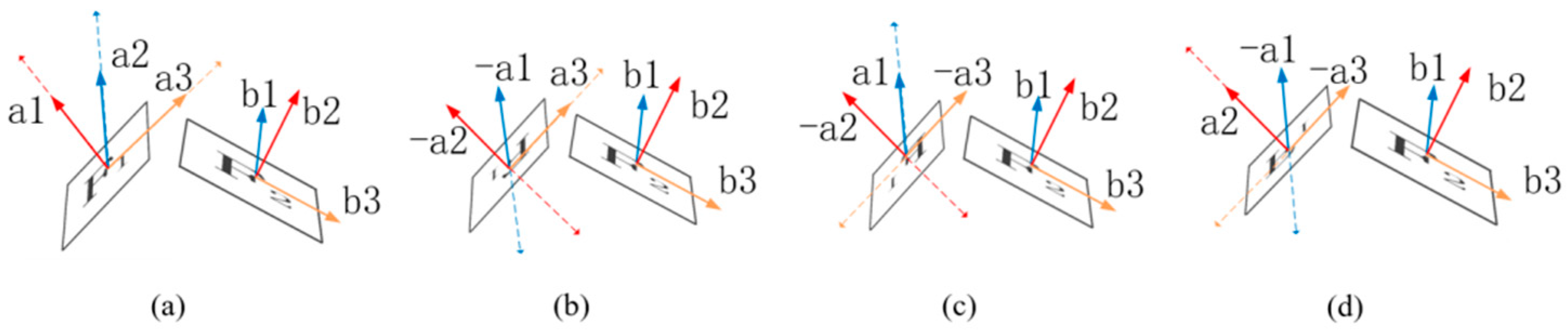
2.3. PCA-DCP Based Method for Registration Stage
3. Results
3.1. SiamesePointNET Network for Matching Stage
3.2. PCA-DCP Based Method for Registration Stage
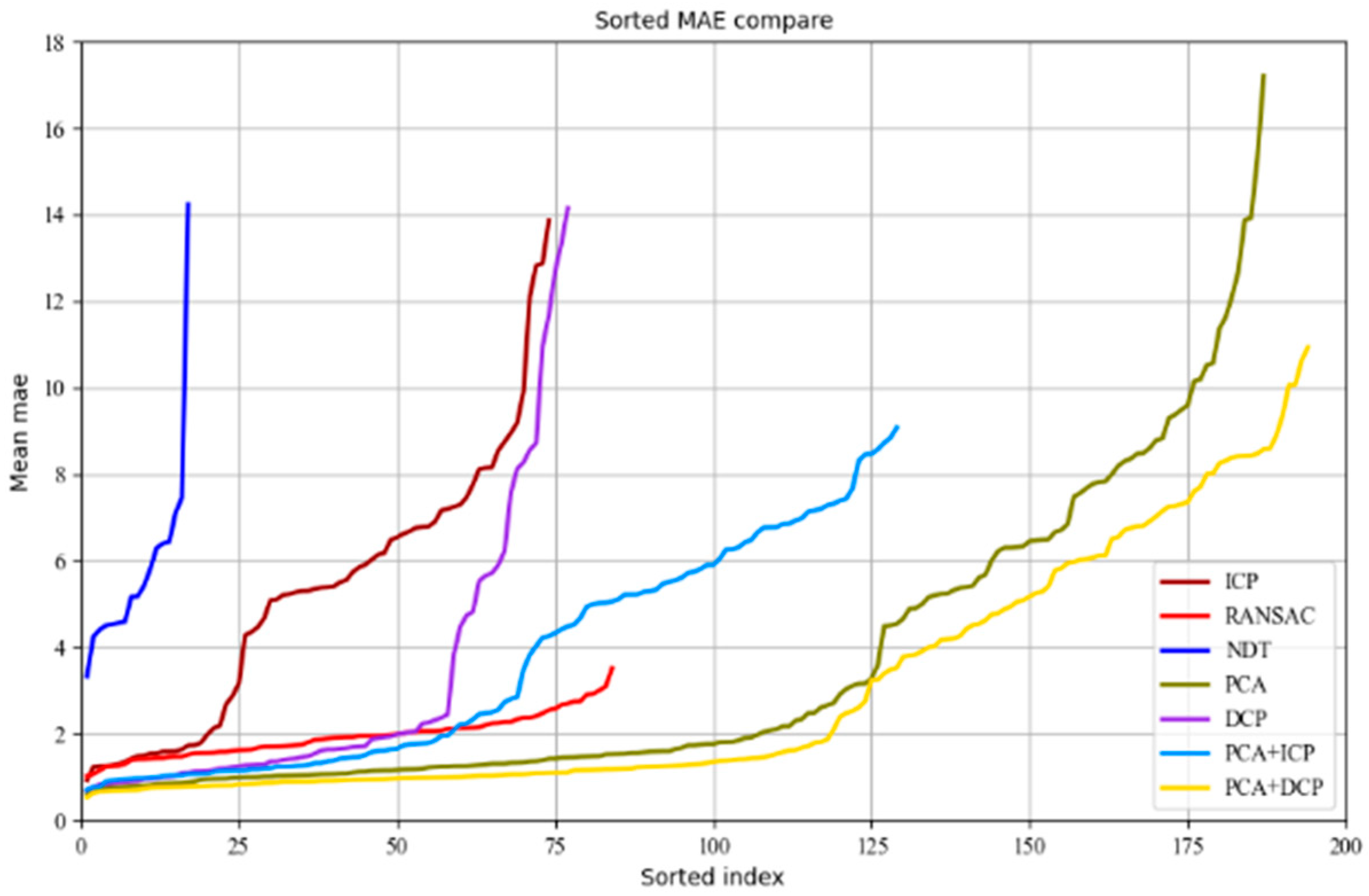
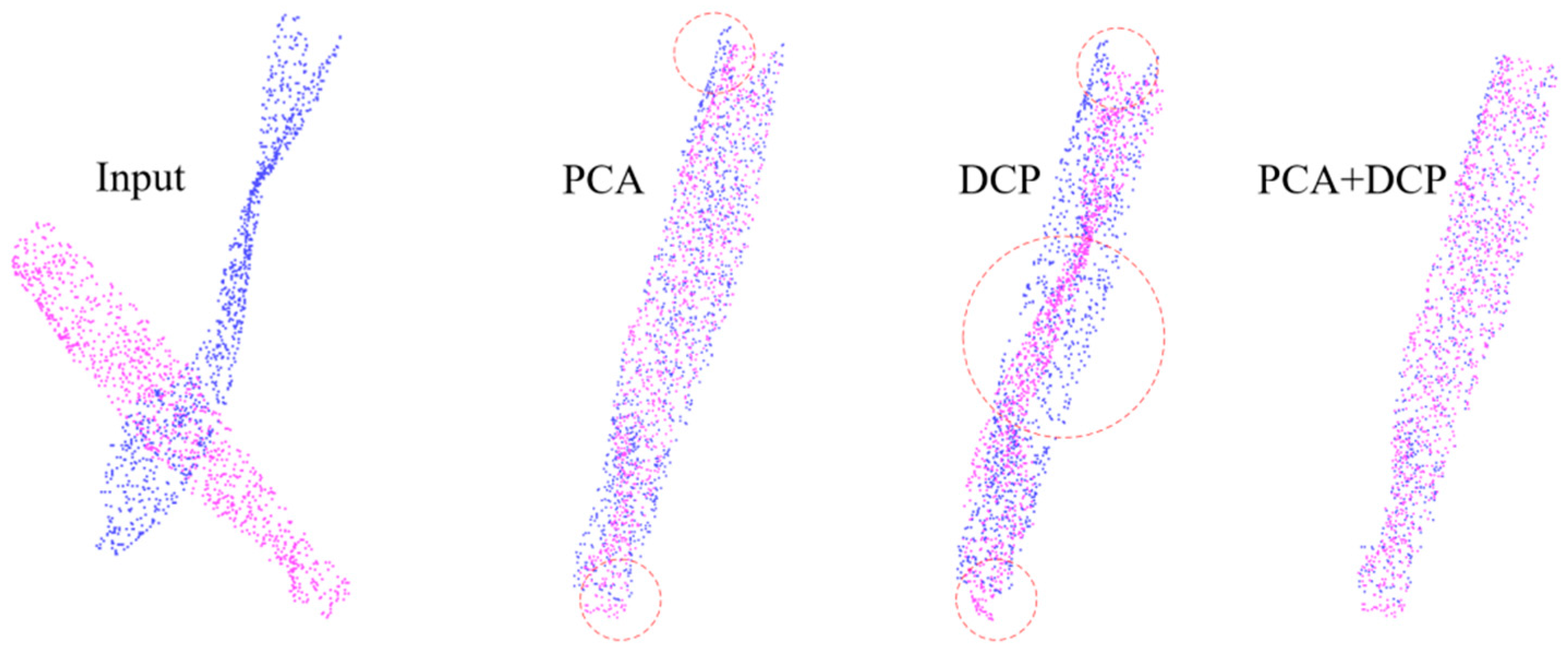
3.2.1. Comparison of Registration Results of Different Methods
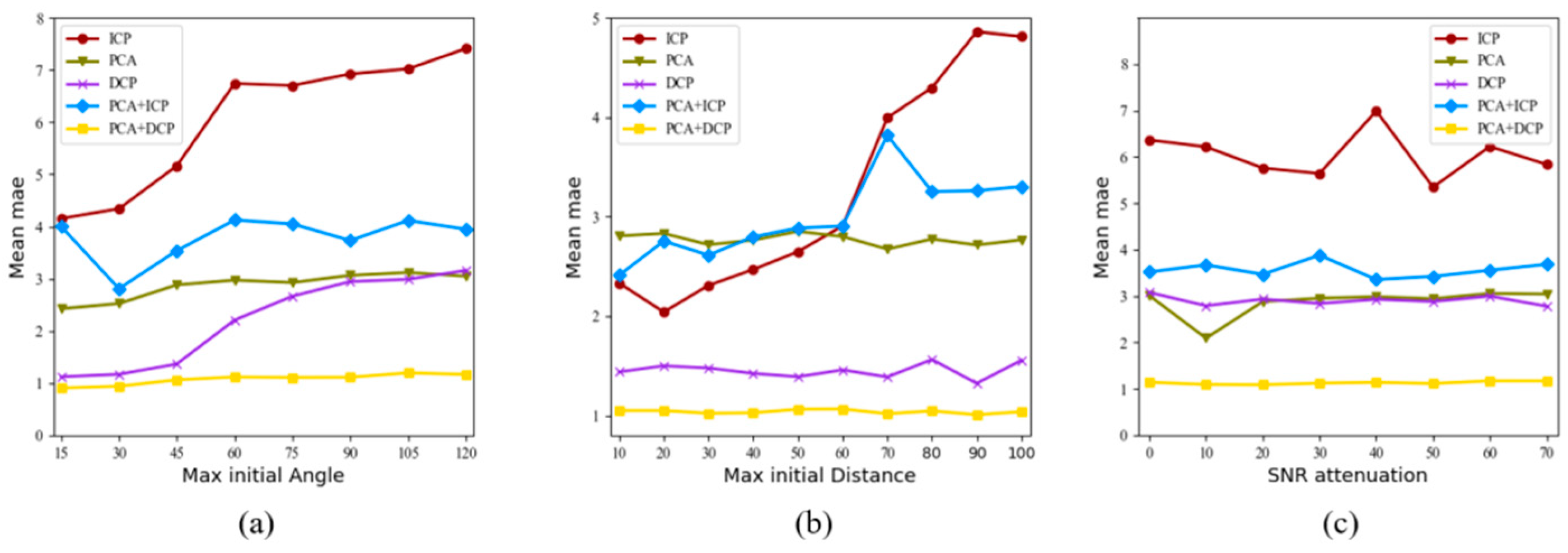
3.2.2. Robustness Experiments
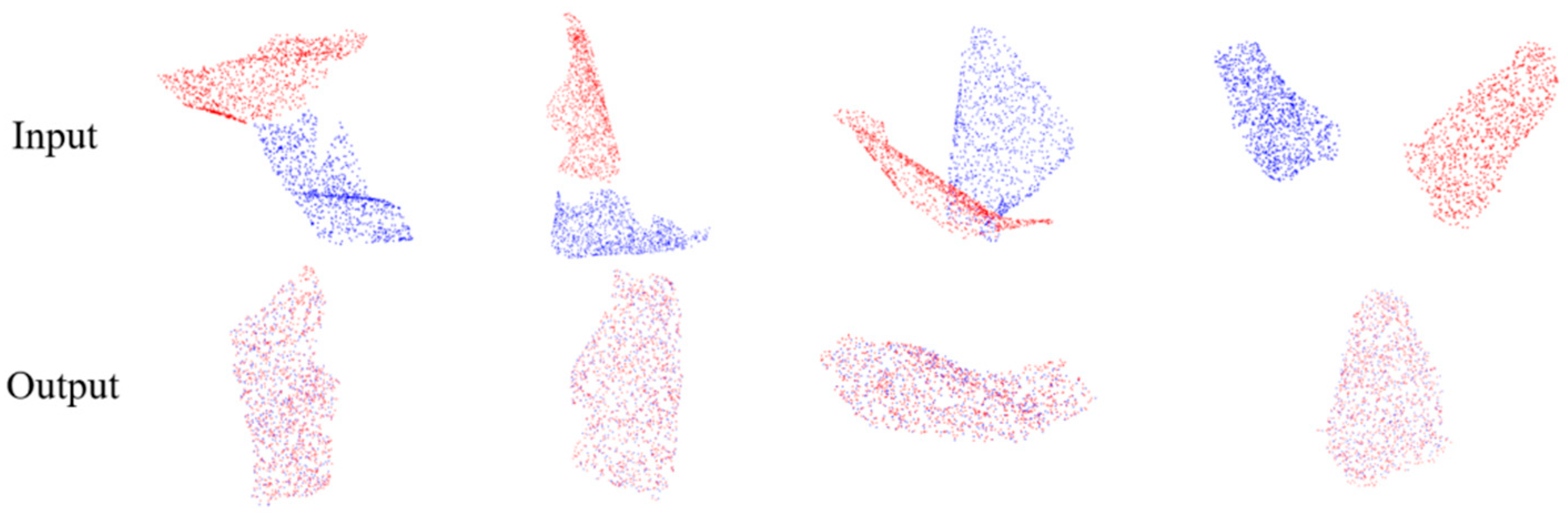
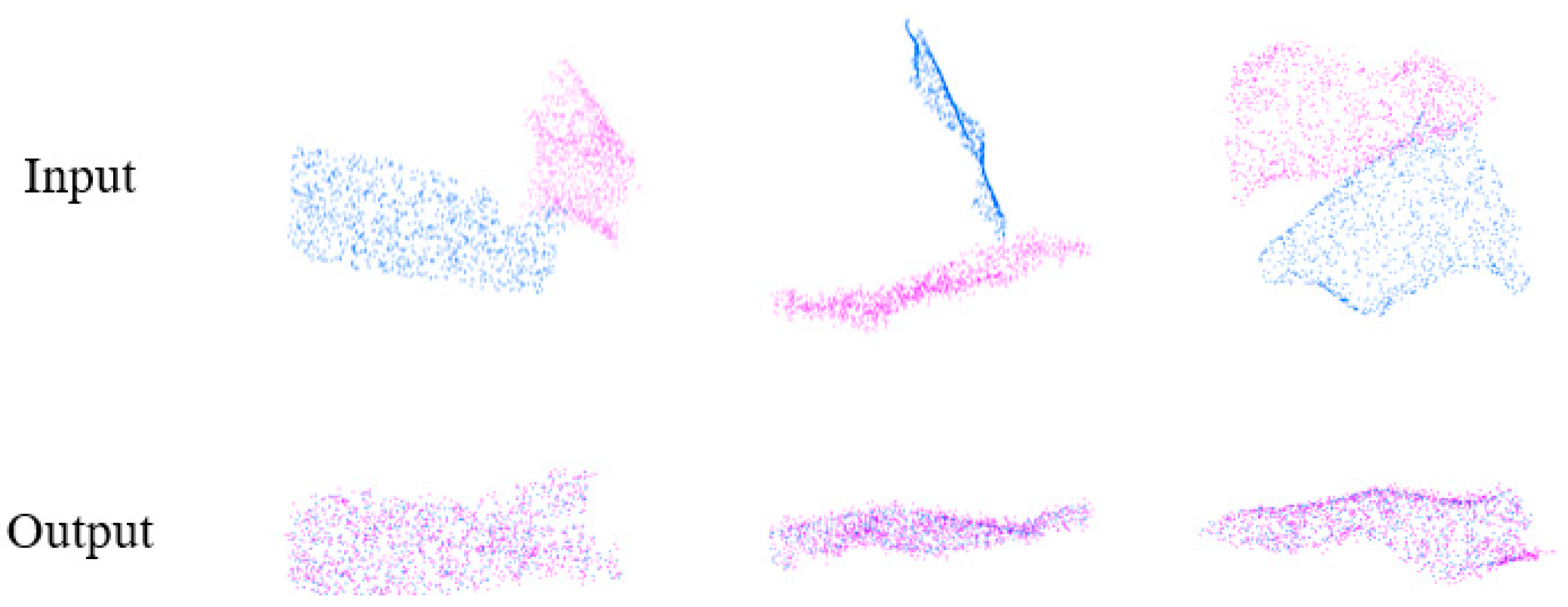
3.3. Reassembling Feasibility on Multiple Real-World Terracotta Warrior Fragments
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gao, H.; Geng, G. Classification of 3D Terracotta Warrior Fragments Based on Deep Learning and Template Guidance. IEEE Access 2020, 8, 4086–4098. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, K.; Chen, X.; Zhang, S.; Geng, G. A multi feature fusion method for reassembly of 3D cultural heritage artifacts. J. Cult. Herit. 2018, 33, 191–200. [Google Scholar] [CrossRef]
- Pan, Y.; Yang, B.; Liang, F.; Dong, Z. Iterative Global Similarity Points: A Robust Coarse-to-Fine Integration Solution for Pairwise 3D Point Cloud Registration. In Proceedings of the 2018 International Conference on 3D Vision (3DV), Verona, Italy, 5–8 September 2018; pp. 180–189. [Google Scholar]
- Vendrell-Vidal, E.; Sánchez-Belenguer, C. A Discrete Approach for Pairwise Matching of Archaeological Fragments. J. Comput. Cult. Herit. 2014, 7, 1–19. [Google Scholar] [CrossRef]
- Altantsetseg, E.; Matsuyama, K.; Konno, K. Pairwise matching of 3D fragments using fast fourier transform. Vis. Comput. 2014, 30, 929–938. [Google Scholar] [CrossRef]
- Papaioannou, G.; Karabassi, E.-A. On the automatic assemblage of arbitrary broken solid artefacts. Image Vis. Comput. 2003, 21, 401–412. [Google Scholar] [CrossRef] [Green Version]
- Wu, M.; Wang, J. Reassembling fractured sand particles using fracture-region matching algorithm. Powder Technol. 2018, 338, 55–66. [Google Scholar] [CrossRef]
- Huang, Q.-X.; Flöry, S.; Gelfand, N.; Hofer, M.; Pottmann, H. Reassembling fractured objects by geometric matching. In Proceedings of the ACM SIGGRAPH 2006 Papers, Boston, MA, USA, 30 July 2006; pp. 569–578. [Google Scholar]
- Son, T.-G.; Lee, J.; Lim, J.; Lee, K. Reassembly of fractured objects using surface signature. Vis. Comput. 2018, 34, 1371–1381. [Google Scholar] [CrossRef]
- Zhang, K.; Yu, W.; Manhein, M.; Waggenspack, W.; Li, X. 3D Fragment Reassembly Using Integrated Template Guidance and Fracture-Region Matching. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 2138–2146. [Google Scholar]
- Li, Q.; Geng, G.; Zhou, M. Pairwise Matching for 3D Fragment Reassembly Based on Boundary Curves and Concave-Convex Patches. IEEE Access 2020, 8, 6153–6161. [Google Scholar] [CrossRef]
- Zhu, H.; Guo, B.; Zou, K.; Li, Y.F.; Yuen, K.V.; Mihaylova, L.; Leung, H. A Review of Point Set Registration: From Pairwise Registration to Groupwise Registration. Sensors 2019, 19, 1191. [Google Scholar] [CrossRef] [Green Version]
- Besl, P.; McKay, N. Method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Du, S.; Liu, J.; Zhang, C.; Zhu, J.; Li, K. Probability iterative closest point algorithm for m-D point set registration with noise. Neurocomputing 2015, 157, 187–198. [Google Scholar] [CrossRef]
- Li, W.; Song, P. A modified ICP algorithm based on dynamic adjustment factor for registration of point cloud and CAD model. Pattern Recognit. Lett. 2015, 65, 88–94. [Google Scholar] [CrossRef]
- Sharp, G.C.; Lee, S.W.; Wehe, D.K. ICP registration using invariant features. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 90–102. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A Globally Optimal Solution to 3D ICP Point-Set Registration. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2241–2254. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Yang, M.; Wang, C.; Wang, B. Cubature Split Covariance Intersection Filter-Based Point Set Registration. IEEE Trans. Image Process. 2018, 27, 3942–3953. [Google Scholar] [CrossRef]
- Moghari, M.H.; Abolmaesumi, P. Point-Based Rigid-Body Registration Using an Unscented Kalman Filter. IEEE Trans. Med. Imaging 2007, 26, 1708–1728. [Google Scholar] [CrossRef]
- Sandhu, R.; Dambreville, S.; Tannenbaum, A. Point Set Registration via Particle Filtering and Stochastic Dynamics. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1459–1473. [Google Scholar] [CrossRef] [Green Version]
- Jian, B.; Vemuri, B.C. Robust Point Set Registration Using Gaussian Mixture Models. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1633–1645. [Google Scholar] [CrossRef]
- Tao, W.B.; Sun, K. Asymmetrical Gauss Mixture Models for Point Sets Matching. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1598–1605. [Google Scholar]
- Wang, G.; Chen, Y. Fuzzy correspondences guided Gaussian mixture model for point set registration. Knowl. Based Syst. 2017, 136, 200–209. [Google Scholar] [CrossRef]
- Zhang, S.; Yang, K.; Yang, Y.; Luo, Y.; Wei, Z. Non-rigid point set registration using dual-feature finite mixture model and global-local structural preservation. Pattern Recognit. 2018, 80, 183–195. [Google Scholar] [CrossRef]
- Maiseli, B.; Gu, Y.; Gao, H. Recent developments and trends in point set registration methods. J. Vis. Commun. Image Represent. 2017, 46, 95–106. [Google Scholar] [CrossRef]
- Cheng, L.; Chen, S.; Liu, X.Q.; Xu, H.; Wu, Y.; Li, M.C.; Chen, Y.M. Registration of Laser Scanning Point Clouds: A Review. Sensors 2018, 18, 1641. [Google Scholar] [CrossRef] [Green Version]
- Kim, C.; Son, H.; Kim, C. Fully automated registration of 3D data to a 3D CAD model for project progress monitoring. Autom. Constr. 2013, 35, 587–594. [Google Scholar] [CrossRef]
- Mandikal, P.; Navaneet, K.L.; Agarwal, M.; Babu, R.V. 3D-LMNet: Latent Embedding Matching for Accurate and Diverse 3D Point Cloud Reconstruction from a Single Image. arXiv 2018, arXiv:1870.07796. [Google Scholar]
- Qi, C.R.; Su, H.; Mo, K.C.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2016; pp. 77–85. [Google Scholar]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. PointNet plus plus: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. In Advances in Neural Information Processing Systems 30; Guyon, I., Luxburg, U.V., Bengio, S., Wallach, H., Fergus, R., Vishwanathan, S., Garnett, R., Eds.; Neural Information Processing Systems (Nips): San Diego, CA, USA, 2017; Volume 30. [Google Scholar]
- Uy, M.A.; Lee, G.H. PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition. In Proceedings of the 2018 IEEE/Cvf Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4470–4479. [Google Scholar]
- Zhou, Y.; Tuzel, O. VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection. In Proceedings of the 2018 IEEE/Cvf Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4490–4499. [Google Scholar]
- Aoki, Y.; Goforth, H.; Srivatsan, R.A.; Lucey, S. PointNetLK: Robust & Efficient Point Cloud Registration Using PointNet. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 7156–7165. [Google Scholar]
- Lu, W.; Wan, G.; Zhou, Y.; Fu, X.; Song, S. DeepICP: An End-to-End Deep Neural Network for 3D Point Cloud Registration. arXiv 2019, arXiv:1905.04153. [Google Scholar]
- Wang, Y.; Solomon, J. Deep Closest Point: Learning Representations for Point Cloud Registration. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–12 November 2019; pp. 3522–3531. [Google Scholar]
- Zhang, Z.; Dai, Y.; Sun, J. Deep learning based point cloud registration: An overview. Virtual Real. Intell. Hardw. 2020, 2, 222–246. [Google Scholar] [CrossRef]
- Chopra, S.; Hadsell, R.; LeCun, Y. Learning a similarity metric discriminatively, with application to face verification. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 539–546. [Google Scholar]
- Makovetskii, A.; Voronin, S.; Kober, V.; Voronin, A. An algorithm for rough alignment of point clouds in three-dimensional space. In Proceedings of the 2020 International Conference on Information Technology and Nanotechnology (ITNT), Samara, Russia, 26–29 May 2020; pp. 1–4. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast Point Feature Histograms (FPFH) for 3D registration. In Proceedings of the IEEE International Conference on Robotics & Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Tombari, F.; Salti, S.; Stefano, L.D. Unique Signatures of Histograms for Local Surface Description. In Proceedings of the European Conference on Computer Vision Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; pp. 356–369. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Magnusson, M. The Three-Dimensional Normal-Distributions Transform—An Efficient Representation for Registration, Surface Analysis, and Loop Detection. Ph.D. Thesis, Örebro University, Örebro, Sweden, 2013. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Points Number | 256 | 512 | 1024 | 2048 | 4096 |
|---|---|---|---|---|---|
| Acc avg class | 92.85% | 93.10% | 95.23% | 96.53% | 95.60% |
| Acc overall | 92.86% | 93.15% | 95.39% | 96.58% | 95.83% |
| Method | FPFH | SHOT | OURS |
|---|---|---|---|
| Acc avg class | 77.93% | 77.04% | 95.60% |
| Acc overall | 77.38% | 77.08% | 95.83% |
| Method | Suc_Rate | MSE | RMSE | MAE | Iteration |
|---|---|---|---|---|---|
| ICP | 20.56% | 9.48 | 3.08 | 1.73 | 23.74 |
| RANSAC | 23.33% | 1.17 | 1.08 | 0.64 | ------ |
| NDT | 4.72% | 13.83 | 3.72 | 1.95 | ------ |
| PCA | 51.67% | 5.28 | 2.30 | 1.18 | ------ |
| DCP | 21.38% | 4.26 | 2.06 | 1.01 | ------ |
| PCA + ICP | 35.83% | 4.77 | 2.19 | 1.21 | 9.03 |
| PCA + DCP | 53.89% | 3.11 | 1.76 | 0.92 | ------ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, W.; Chu, T.; Tang, W.; Wang, J.; Cao, X.; Zhao, F.; Li, K.; Geng, G.; Zhou, M. SPPD: A Novel Reassembly Method for 3D Terracotta Warrior Fragments Based on Fracture Surface Information. ISPRS Int. J. Geo-Inf. 2021, 10, 525. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10080525
Yao W, Chu T, Tang W, Wang J, Cao X, Zhao F, Li K, Geng G, Zhou M. SPPD: A Novel Reassembly Method for 3D Terracotta Warrior Fragments Based on Fracture Surface Information. ISPRS International Journal of Geo-Information. 2021; 10(8):525. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10080525
Chicago/Turabian StyleYao, Wenmin, Tong Chu, Wenlong Tang, Jingyu Wang, Xin Cao, Fengjun Zhao, Kang Li, Guohua Geng, and Mingquan Zhou. 2021. "SPPD: A Novel Reassembly Method for 3D Terracotta Warrior Fragments Based on Fracture Surface Information" ISPRS International Journal of Geo-Information 10, no. 8: 525. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi10080525