
Research on Three-Dimensional Electronic Navigation Chart Hybrid Spatial Index Structure Based on Quadtree and R-Tree


Abstract
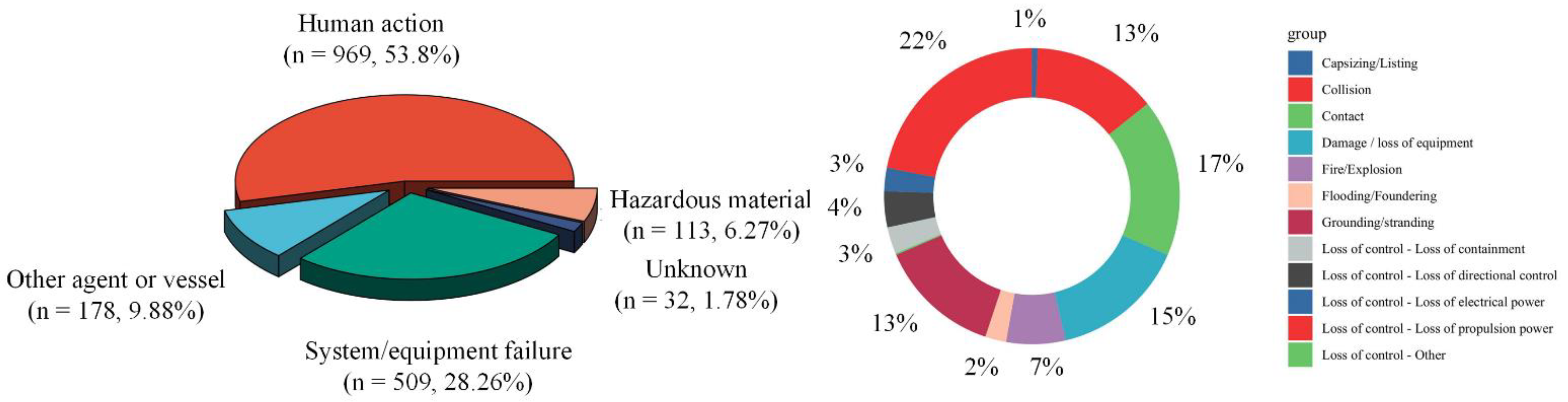
:1. Introduction
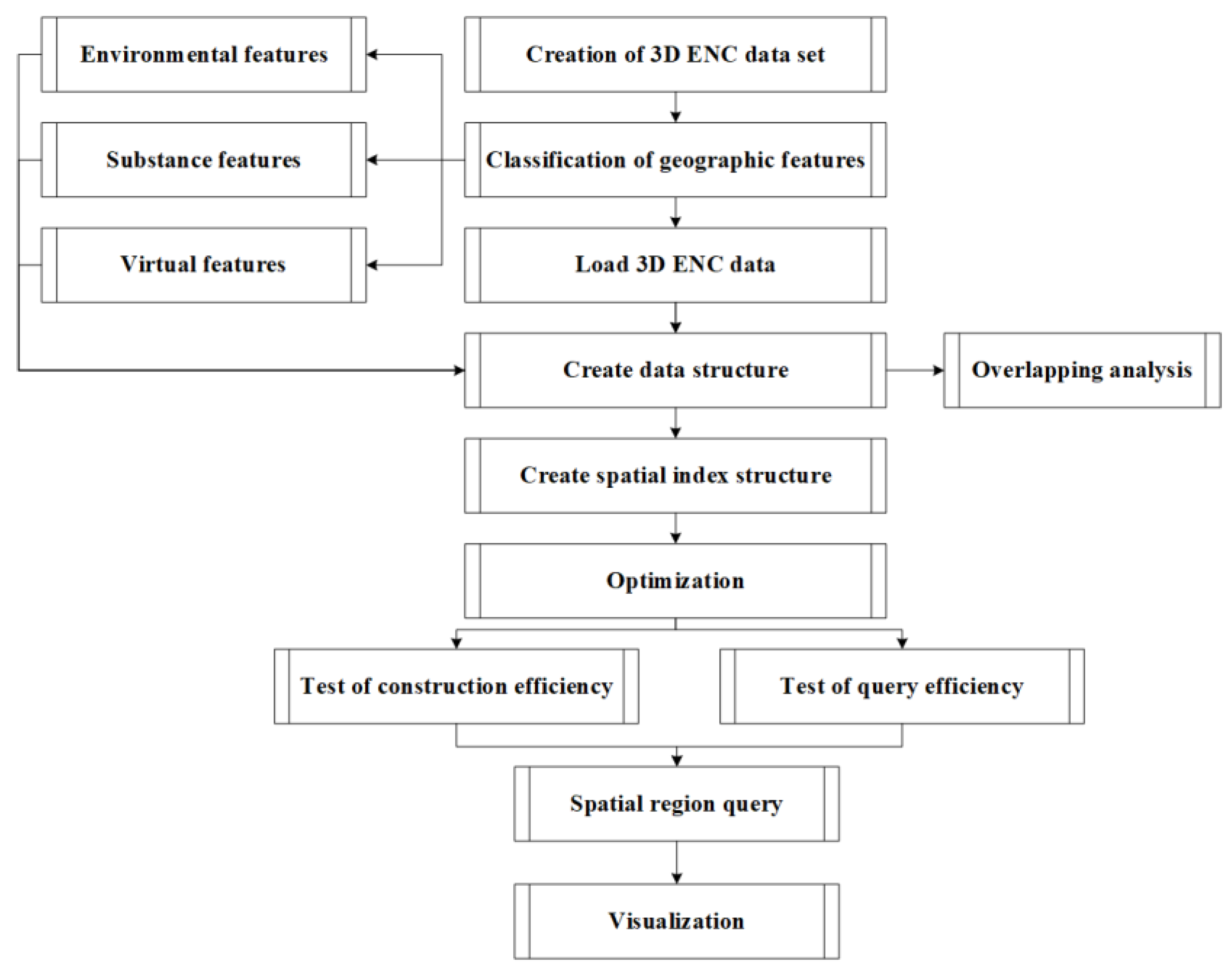
2. Creation of the 3D ENC Data Set
2.1. Classification of Geographic Features Based on S-101
2.2. The 3D ENC Data Sets of Geographic Features
2.2.1. Environmental Features
2.2.2. Substance Features
2.2.3. Virtual Features
3. Spatial Index Structure
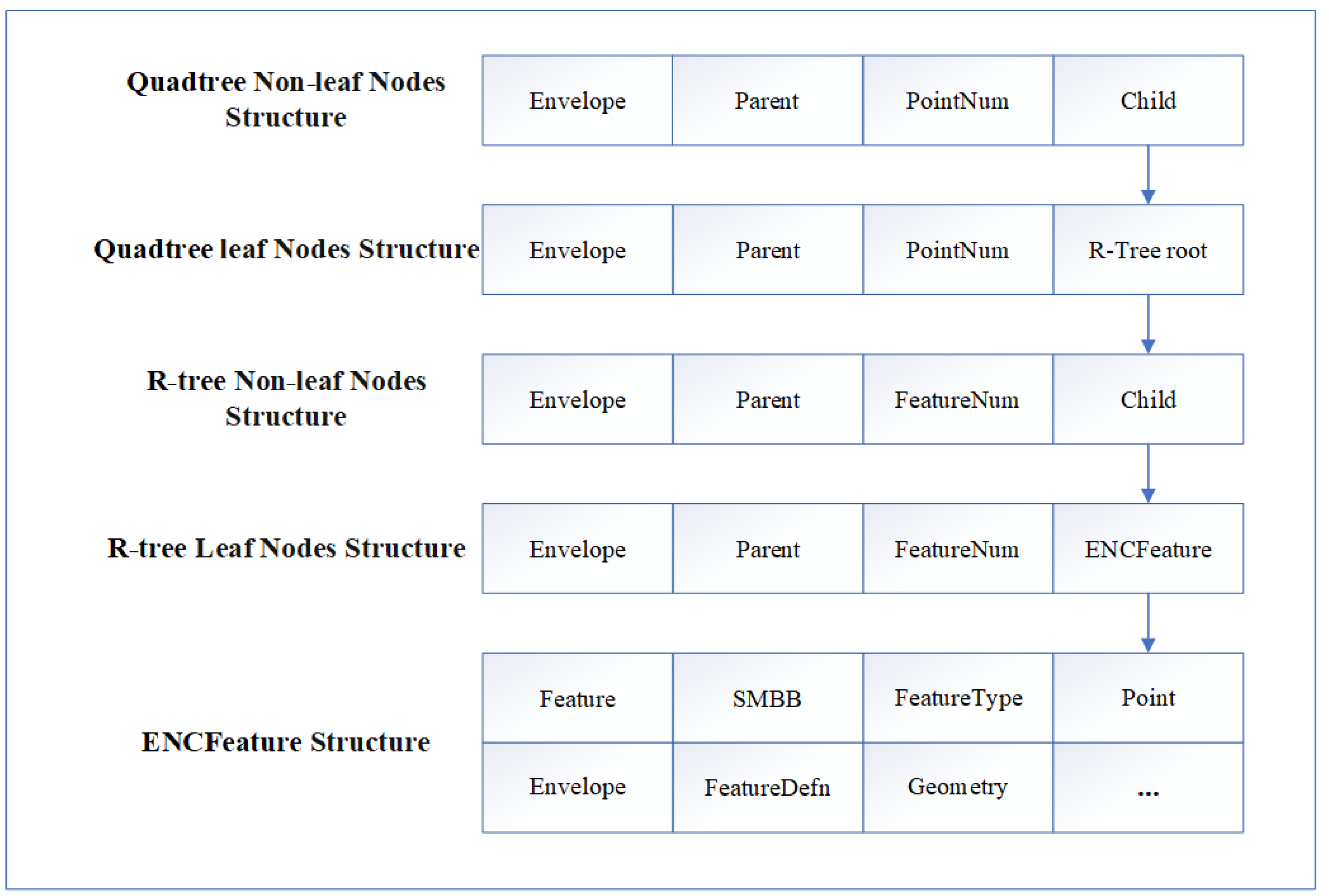
3.1. Data Structures of 3D ENC Features
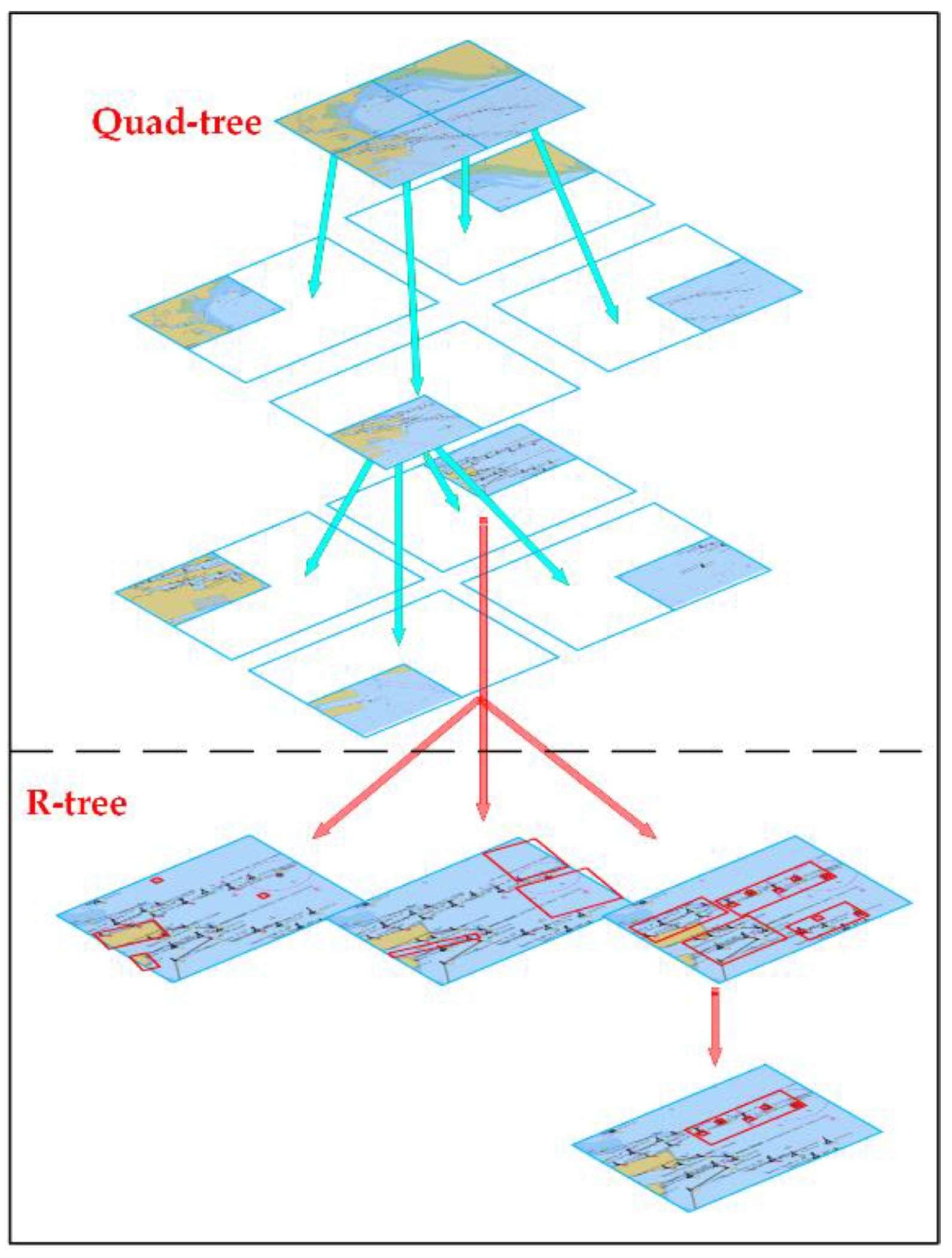
3.2. Spatial Index Structures of 3D ENC Features
- Read the information of all ENC features, calculate the envelope and SMBB of ENC features, and save the position information of all points in the features. Since ENC features usually have no height information in space, this paper sets a height value for the features point according to the attribute and draws the proportion of the features to form a 3D space feature.
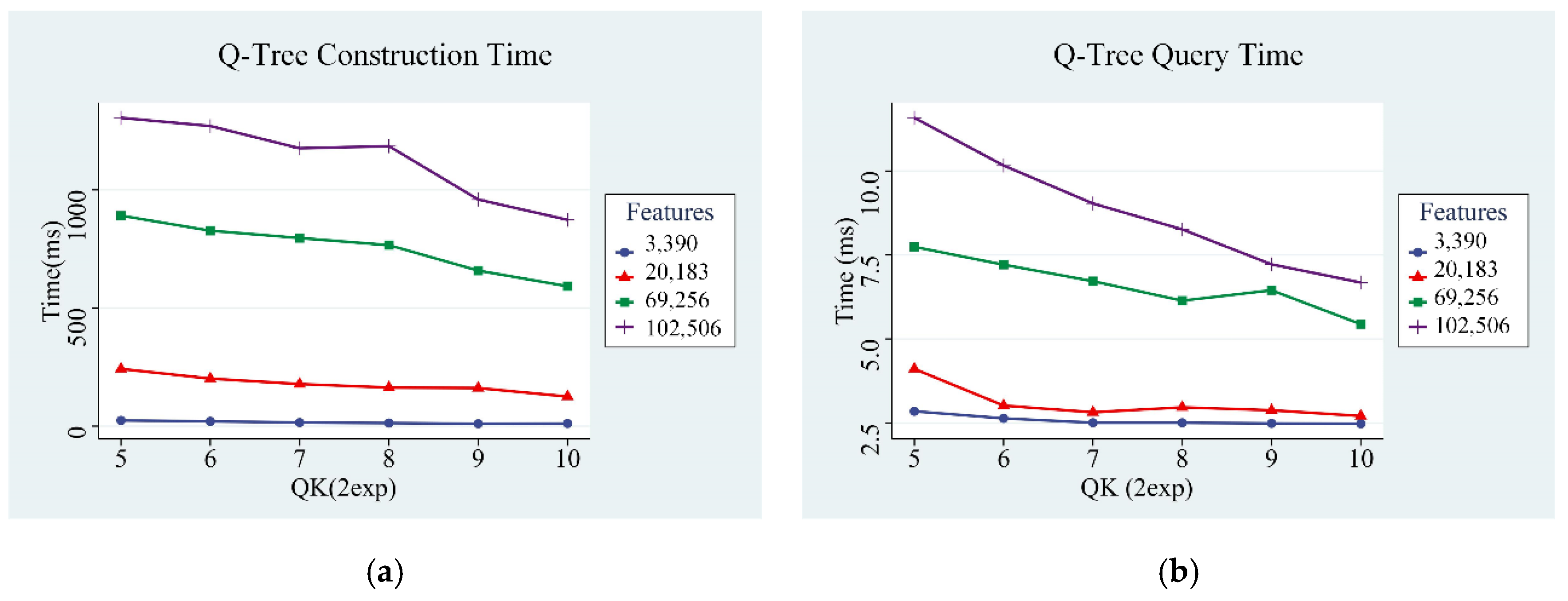
- Create a quadtree and insert ENC features E in sequence. If the points number of the node is less than the threshold QK, continue to insert. If the threshold QK is exceeded, the quadtree node is evenly divided into four sub-nodes, and the ENC features of the node are reallocated to the corresponding sub-nodes.
- R-trees were constructed on the quadtree leaf nodes that completed spatial division. According to the types of ENC features, environmental features, substance features, and virtual features were inserted into the three R-trees, one by one.
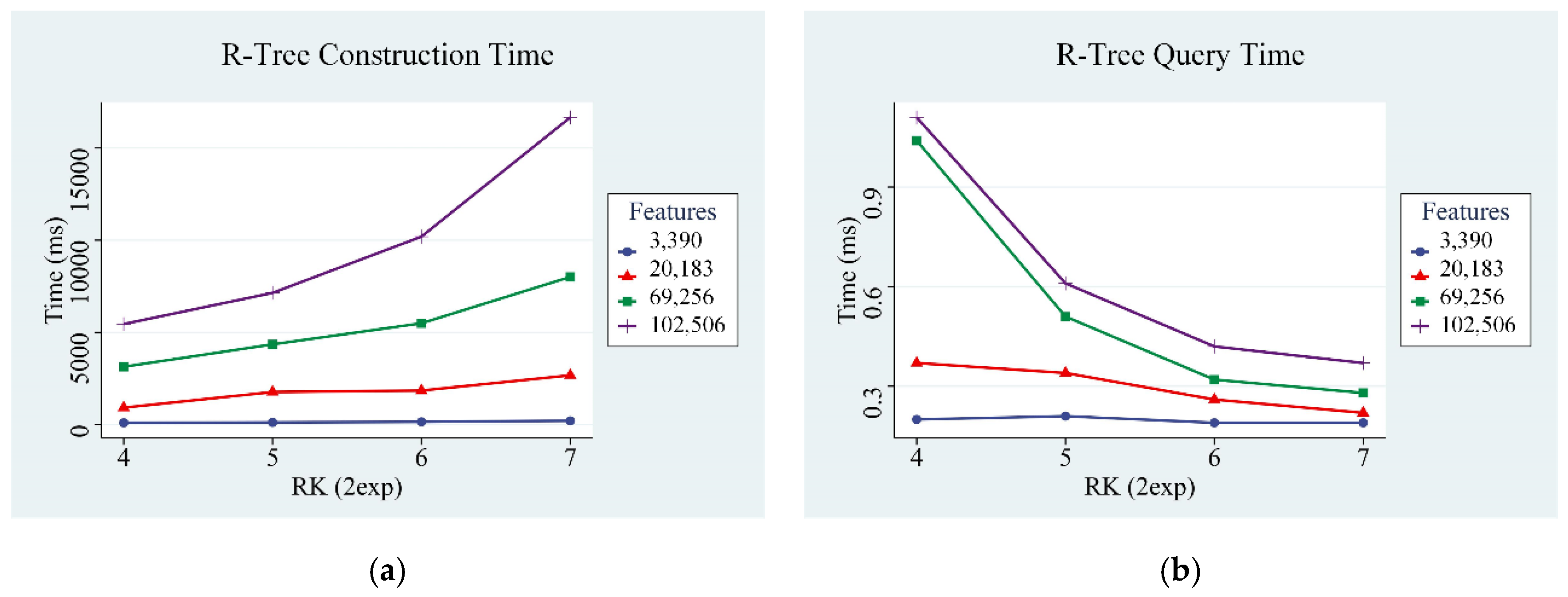
- In the process of inserting ENC features E into the R-tree node L, if the node L does not reach the threshold of leaf node features number RK, then features E is inserted. Otherwise, nodes are split to get two child nodes that contain all the features in features E and node L, and then adjust from the leaf node to the root node.
- Step 4 is performed recursively until all ENC features are inserted into the R-tree to complete the construction of the 3DENCQR-tree index structure.
3.3. Spatial Query of 3D ENC Features
- Set the query area SA.
- Query from the quadtree root node and calculate the spatial relationship between each node QN in the quadtree and SA of. If QN is included by SA, all leaf nodes of the QN are returned as query results and stop the spatial query process of the QN. If QN and SA are separated, there is no query result and the spatial query process of the QN stops. If other relationships are formed, the query operation is iterated in the child nodes of QN until the leaf node of the quadtree is reached, and then step 3 is performed.
- Starting from all the returned leaf nodes of the quadtree, query the root nodes of the three R-trees, respectively, and calculate the spatial relationship between each node RN of the R-tree and SA. If RN is included by SA, all leaf nodes of this RN are returned as query results and the spatial query process of this RN is stopped. If RN and SA are separated, there is no query result and the spatial query process of this RN stops. If other relationships are formed, the query operation is iterated in the child nodes of RN until the leaf node of R-tree is reached, and step 4 is performed.
- Visit all returned leaf nodes of R-tree and iteratively calculate the relationship between each ENC feature and SA. Then, the ENC features contained in or intersected with SA are added to the query result until all features are calculated.
3.4. Optimization Method
- Obtain the envelope of ENC features, MaxX, MinX, MaxY, and MinY, construct four tangents according to the range boundary, and determine two “clamping” sets.
- If one or two lines coincide with an edge, calculate the area of the rectangle determined by the four lines and save it as the current minimum. Otherwise, the current minimum is defined as infinity.
- Rotate the lines clockwise until one of them coincides with one of the sides of the polygon.
- Calculate the area of the new rectangle and compare it to the current minimum. Updates if it is less than the current minimum and save the rectangle information that determines the minimum.
- Repeat steps 3 and 4 until the line has been rotated at an angle greater than 90 degrees.
- Print the minimum area of the enclosing rectangle and save the rectangle information.
4. Results and Discussion
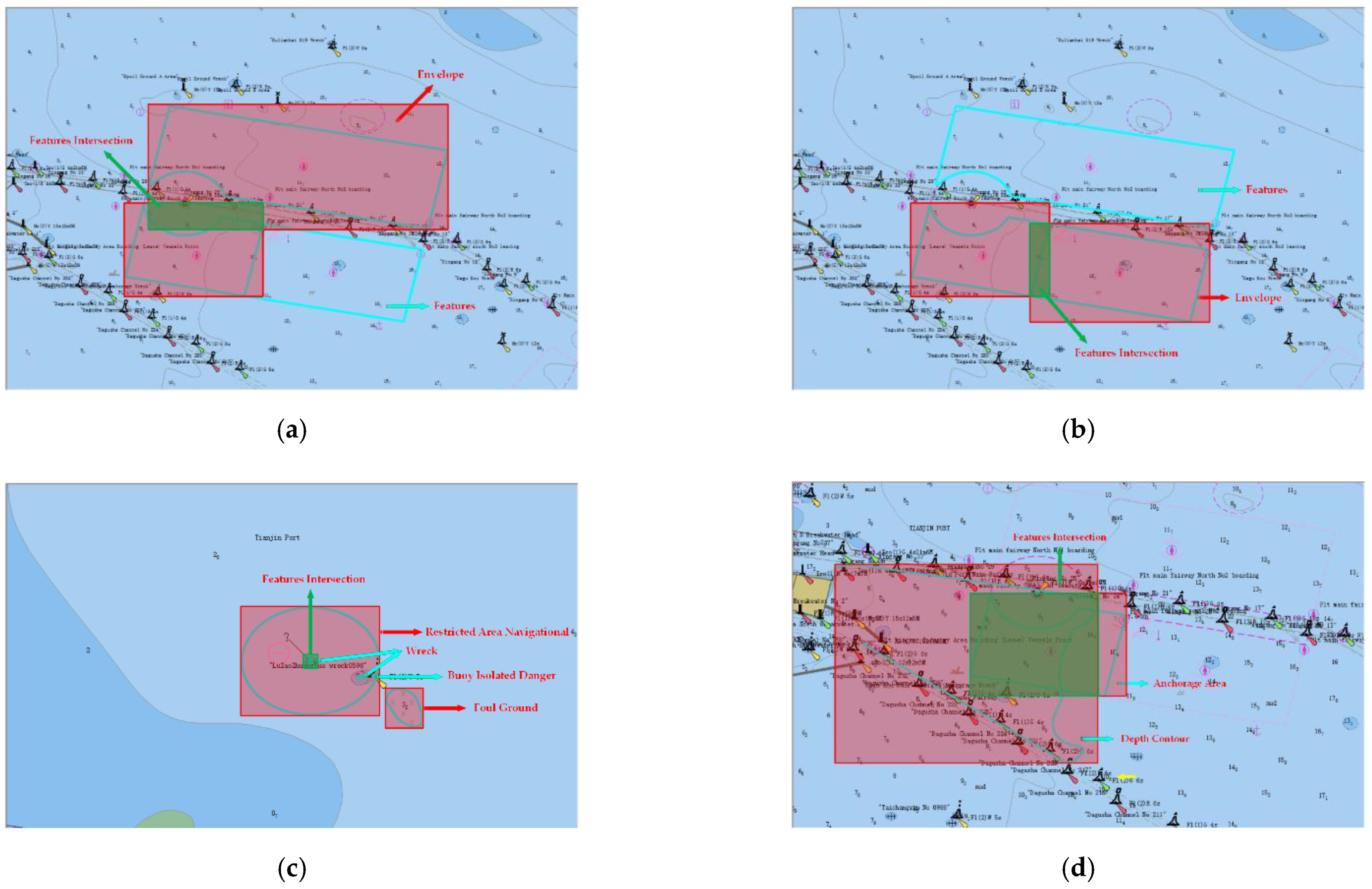
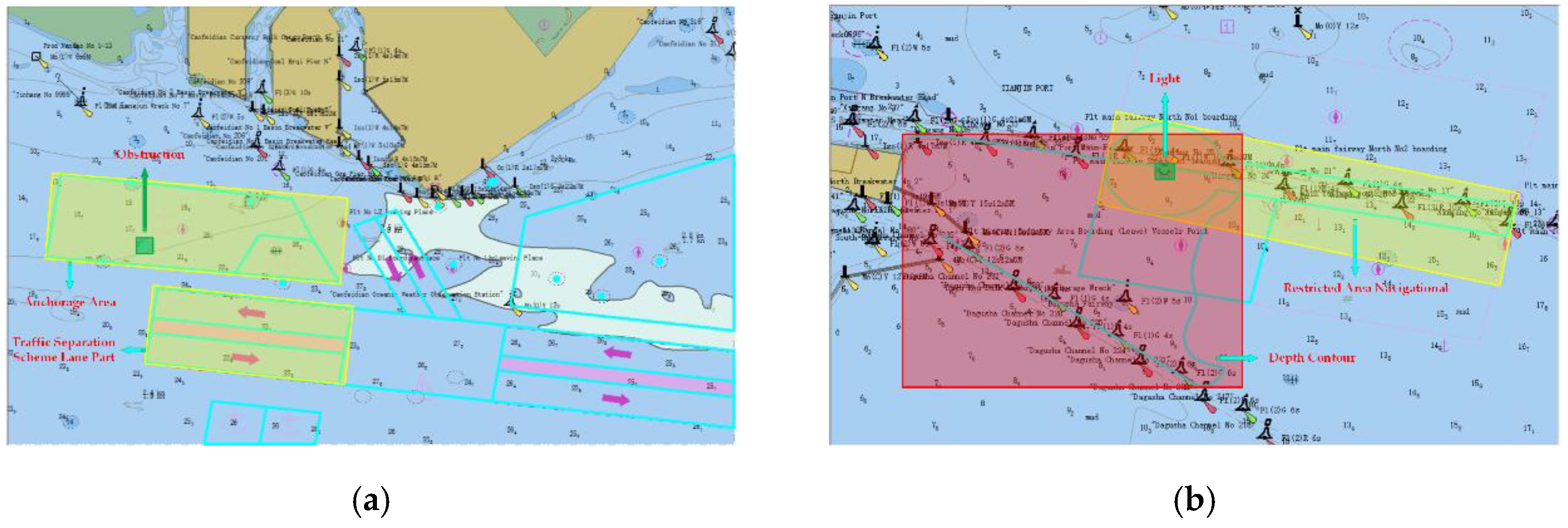
4.1. Overlapping Analysis of ENC Features
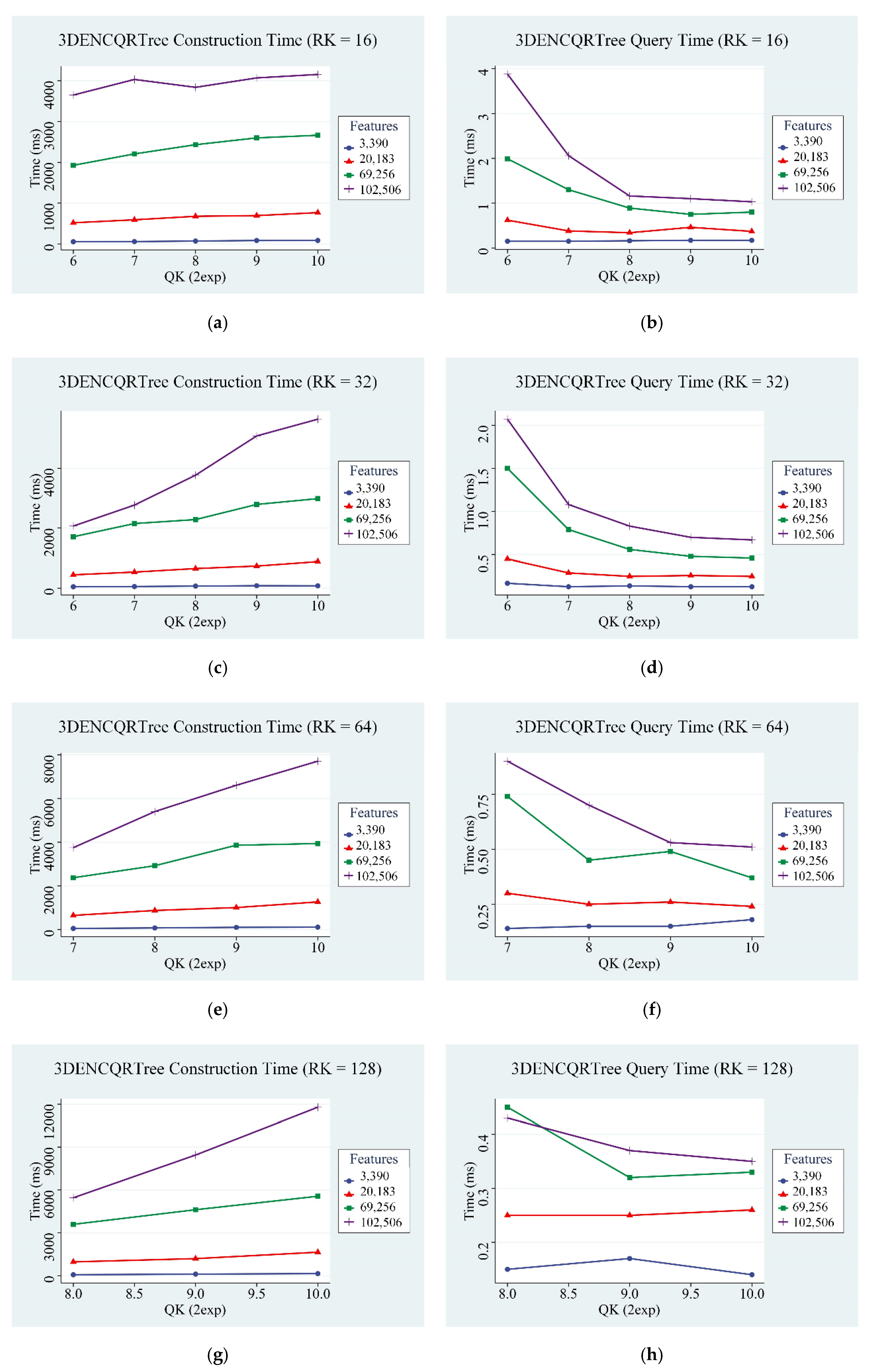
4.2. Test Results of Spatial Index Structure
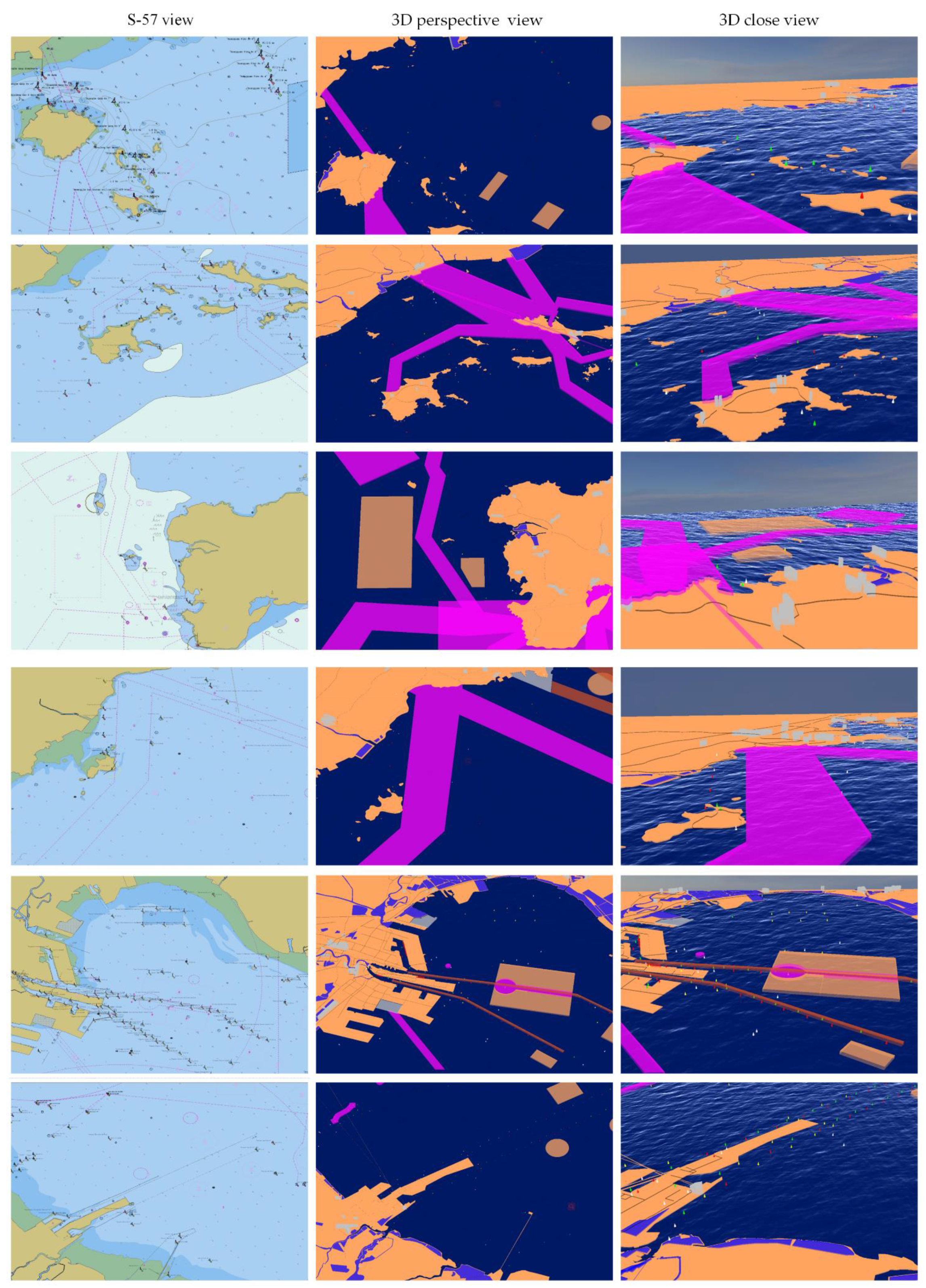
4.3. Visualization of the 3D ENC
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| 2D ENC | Two-Dimensional Electronic Navigational Chart |
| 3D ENC | Three-Dimensional Electronic Navigational Chart |
| AIS | Automatic Identification System |
| BSP | Binary Space Partitioning |
| BVH | Bounding Volume Hierarchies |
| ECDIS | Electronic Chart Display and Information System |
| ENC | Electronic Navigational Charts |
| FFT | Fast Fourier Transform |
| GIS | Geographic Information System |
| IHO | International Hydrographic Organization |
| MBB | Minimum Bounding Box |
| S-100 | The S-100 Universal Hydrological Data Model |
| S-101 | The S-101 Universal Hydrological Data Model |
| S-57 | The S-57 Universal Hydrological Data Model |
| SMBB | Smallest Minimum Bounding Box |
| WEND | Worldwide Electronic Navigational Charts Database |
References
- Turna, İ.; Öztürk, O.B. A causative analysis on ECDIS-related grounding accidents. Ships Offshore Struct. 2020, 15, 792–803. [Google Scholar] [CrossRef]
- Weintrit, A. Accuracy of bathymetric data in electronic navigational charts. Sci. J. Marit. Univ. Szczec. Zesz. Nauk. Akad. Mor. W Szczec. 2018, 55, 60–69. [Google Scholar]
- Acomi, N. Impact of Chart Data Accuracy on the Safety of Navigation. TransNav 2020, 14, 411–415. [Google Scholar] [CrossRef]
- European Maritime Safety Agency. Annual Overview of Marine Casualties and Incidents; European Maritime Safety Agency: Lisbon, Portugal, 2020. [Google Scholar]
- Goralski, R.; Ray, C.; Gold, C. Applications and Benefits for the Development of Cartographic 3D Visualization Systems in support of Maritime Safety. TransNav-Int. J. Mar. Navig. Saf. Sea Transp. 2011, 5, 423–431. [Google Scholar]
- Weintrit, A. Clarification, Systematization and General Classification of Electronic Chart Systems and Electronic Navigational Charts Used in Marine Navigation. Part 1—Electronic Chart Systems. TransNav-Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 471–482. [Google Scholar] [CrossRef] [Green Version]
- Weintrit, A. Clarification Systematization and General Classification of Electronic Chart Systems and Electronic Navigational Charts Used in Marine Navigation. Part 2 Electronic Navigational Charts. TransNav-Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 769–780. [Google Scholar] [CrossRef] [Green Version]
- Arsenault, R.; Smith, L.T.; Ware, C.; Mayer, L.A.; Plumlee, M.D. Fusing information in a 3D Chart-of-the-Future display. In Proceedings of the U.S. Hydro 2003 Conference, Biloxi, MS, USA, 24–27 March 2003. [Google Scholar]
- Goralski, R.; Gold, C. Marine GIS: Progress in 3D Visualization for Dynamic GIS; Springer: Berlin/Heidelberg, Germany, 2008; pp. 401–416. [Google Scholar]
- Liu, T.; Zhao, D.; Pan, M. Generating 3D Depiction for a Future ECDIS Based on Digital Earth. J. Navig. 2014, 67, 1049–1068. [Google Scholar] [CrossRef]
- Gold, C.; Chau, M.; Dzieszko, M.; Goralski, R. 3D Geographic Visualization: The Marine GIS; Springer: Berlin/Heidelberg, Germany, 2005; pp. 17–28. [Google Scholar]
- Grishentcev, A.; Elsukov, A. Design and analysis of algorithm for smooth stiching of electronic navigation charts. In Proceedings of the 2018 IEEE International Conference on Electrical Engineering and Photonics (EExPolytech), St. Petersburg, Russia, 22–23 October 2018. [Google Scholar]
- Park, D.; Park, S. E-Navigation-supporting data management system for variant S-100-based data. Multimed. Tools Appl. 2015, 74, 6573–6588. [Google Scholar] [CrossRef]
- Park, D.; Park, S. Syntactic-level integration and display of multiple domains’ S-100-based data for e-navigation. Clust. Comput. 2017, 20, 721–730. [Google Scholar] [CrossRef]
- Lin, H.; Huang, P.; Hsu, K. A new indexing method with high storage utilization and retrieval efficiency for large spatial databases. Inf. Softw. Technol. 2007, 49, 817–826. [Google Scholar] [CrossRef]
- Zhu, Q.; Gong, J.; Zhang, Y. An efficient 3D R-tree spatial index method for virtual geographic environments. ISPRS J. Photogramm. Remote Sens. 2007, 62, 217–224. [Google Scholar] [CrossRef]
- Wang, W.; Xuan, Z.; Sun, L.; Jiang, Z.; Shang, J. BRLO-Tree: A Data Structure Used for 3D GIS Dynamic Scene Rendering. Cybern. Inf. Technol. 2015, 15, 124–137. [Google Scholar] [CrossRef] [Green Version]
- Tayeb, J. A Quadtree-Based Dynamic Attribute Indexing Method. Comput. J. 1998, 41, 185–200. [Google Scholar] [CrossRef]
- Ma, M.; Wu, Y.; Ouyang, X.; Chen, L.; Li, J.; Jing, N. HiVision: Rapid visualization of large-scale spatial vector data. Comput. Geosci. 2021, 147, 104665. [Google Scholar] [CrossRef]
- Zhang, Z.J. Research on Index Method of Waterborne Big Data with Location Information. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2015; p. 156. [Google Scholar]
- Gong, J.; Shengnan, K.E.; Qing, Z.H.U. An Efficient Management Method for Point Cloud Data Based on Octree and 3D R-tree. Acta Geod. Et Cartogr. Sin. 2012, 9, 597–604. [Google Scholar]
- Kun, Z.G.; Guo, L.X.; Hui, Y. Research on Spatial Index Structure of LOD-OR Tree in 3D GIS. Bull. Surv. Mapp. 2005, 5, 27–29. [Google Scholar]
- Wang, Y.; Lv, H.; Ma, Y. Geological tetrahedral model-oriented hybrid spatial indexing structure based on Octree and 3D R*-tree. Arab. J. Geosci. 2020, 13, 1–11. [Google Scholar] [CrossRef]
- International Hydrographic Organization. Universal Hydrographic Data Model Special, Publication S-100, Edition 4.0.0. Available online: https://iho.int/en/s-100-universal-hydrographic-data-model (accessed on 31 December 2018).
- Kastrisios, C.; Pilikou, M. Nautical cartography competences and their effect to the realisation of a worldwide Electronic Navigational Charts database, the performance of ECDIS and the fulfilment of IMO chart carriage requirements. Mar. Policy 2017, 75, 29–37. [Google Scholar] [CrossRef]
- International Hydrographic Organization. IHO Electronic Navigational Chart Product Specification, Publication S-101, Edition 1.0.0. Available online: https://iho.int/en/standards-and-specifications (accessed on 21 December 2018).
- Johanson, C. Real-Time Water Rendering. Master’s Thesis, Lund University, Lund, Sweden, 2004. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geographic Features | Content | ||
| Environmental Features | Substance Features | Virtual Features | |
| Magnetic Data | Magnetic Variation, Local Magnetic Anomaly | ||
| Natural Features | Coastline, Land Area, Island group, Land elevation, River, River, Rapids, Waterfall, Lake, Land region, Vegetation, Ice area, Sloping Ground, Slope Topline, Tideway | ||
| Cultural Features | Built-up area, Building, Airport/Airfield, Runway, Bridge, Span Fixed, Span Opening, Conveyor, Cable Overhead, Pipeline Overhead, Pylon/Bridge Support, Fence/wall, Railway, Road, Tunnel | ||
| Landmarks | Landmark, Silo/tank, Wind Turbine, Fortified Structure,Production/Storage Area | ||
| Ports | Checkpoint, Hulks,Piles, Dyke, Shoreline Construction, Causeway, Canal,Distance Mark, Gate, Dam, Crane,Berth, Mooring/Warping Facility, Dry Dock, Floating Dock, Pontoon,Dock Area, Gridiron, Lock Basin, Mooring Trot | ||
| Topographic Terms | Sea Area/Named Water Area | ||
| Tides, Currents | Tidal Stream–Flood/Ebb, Current–Non-Gravitational, Water Turbulence, Tidal Stream Panel Data | ||
| Depths | Sounding, Dredged Area, Swept Area, Depth Contour, Depth Area, Depth–No Bottom Found, Unsurveyed Area | ||
| Nature of the Seabed | Seabed Area, Weed/Kelp, Sandwaves, Spring | ||
| Rocks, Wrecks, Foul Ground, Obstructions | Underwater/Awash Rock, Wreck, Obstruction,Foul Ground, Discolored Water,Fishing Facility, Marine Farm/Culture | ||
| Offshore Installations | Offshore Platform, Cable Submarine,Cable Area, Pipeline Submarine/On Land,Submarine Pipeline Area, Offshore Production Area | ||
| Tracks and Routes | Navigation Line, Recommended Track, Range System, Fairway, Fairway System, Recommended Route Centerline, Two-Way Route Part, Two-Way Route, Recommended Traffic Lane Part, Deep Water Route Centerline, Deep Water Route Part, Deep Water Route, Inshore Traffic Zone, Precautionary Area, Traffic Separation Scheme Lane Part, Traffic Separation Zone, Traffic Separation Line, Traffic Separation Scheme Boundary, Traffic Separation Scheme Crossing, Traffic Separation Scheme Roundabout, Traffic Separation Scheme, Archipelagic Sea Lane Area, Archipelagic Sea Lane Axis, Archipelagic Sea Lane, Ferry Route, Radar Line, Radar Range,Radar Station | ||
| Areas, Limits | Anchorage Area, Anchor Berth, Seaplane Landing Area, Dumping Ground, Military Practice Area, Administration Area, Cargo Transshipment Area, Caution Area, Information Area, Contiguous Zone, Continental Shelf Area, Custom Zone, Exclusive Economic Zone, Fishery Zone, Fishing Ground, Free Port Area, Harbor Area (Administrative), Log Pond, Oil Barrier, Straight Territorial Sea Baseline, Territorial Sea Area, Submarine Transit Lane, Pilotage District, Collision Regulations Limit | ||
| Restricted Areas | Restricted Area Navigational, Restricted Area Regulatory | ||
| Lights | Light All Around, Light Sectored, Light Fog Detector, Light Air Obstruction | ||
| Buoys, Beacons | Buoy Lateral, Buoy Cardinal, Buoy Isolated Danger, Buoy Safe Water, Buoy Special Purpose/General, Buoy Emergency Wreck Marking, Buoy Installation, Beacon Lateral, Beacon Cardinal, Beacon Isolated Danger, Beacon Safe Water, Beacon Special Purpose/General,Daymark,Light Float, Light Vessel, Retroreflector, Radar Reflector, Fog Signal | ||
| Radar, Radio | Physical AIS Aid to Navigation,Virtual AIS Aid to Navigation, Radio Station, Radar Transponder Beacon | ||
| Services | Pilot Boarding Place, Vessel Traffic Service Area,Coastguard Station, Signal Station Warning, Signal Station Traffic, Rescue Station, Harbor Facility, Small Craft Facility | ||
| ENC Data (.000) | Byte (KB) | Environmental Features | Substance Features | Virtual Features | Number of Features | Number of Points |
|---|---|---|---|---|---|---|
| CN323101 | 1066 | 1736 | 628 | 743 | 3107 | 70,723 |
| CN321001 | 1759 | 1551 | 384 | 1330 | 3265 | 181,937 |
| CN322001 | 490 | 1203 | 235 | 140 | 1578 | 28,704 |
| CN324101 | 1443 | 1783 | 507 | 358 | 2648 | 209,746 |
| CN333001 | 474 | 1230 | 401 | 194 | 1825 | 54,212 |
| CN334001 | 1450 | 1859 | 610 | 1198 | 3667 | 114,760 |
| Mean Area | Before Optimization (km2) | Optimization (km2) | Ratio of Decreased Area |
|---|---|---|---|
| Envelope | 30.472 | 23.387 | 23.251% |
| Features Intersection | 19.002 | 12.509 | 34.170% |
| Environmental Features Intersection | 18.369 | 13.255 | 27.840% |
| Substance Features Intersection | 0.129 | 0.012 | 90.698% |
| Virtual Features Intersection | 14.767 | 8.090 | 45.216% |
| Environmental Features Intersect with Substance Features | 1.013 | 0.571 | 43.633% |
| Environmental Features Intersect with Virtual Features | 31.687 | 22.388 | 29.346% |
| Substance Features Intersect with Virtual Features | 1.615 | 0.991 | 38.638% |
| Intersect with Features of the Same Type | 15.790 | 9.731 | 38.372% |
| Intersect with Features of Different Types | 24.364 | 17.173 | 29.515% |
| Features | Legend | Features | Legend | ||
|---|---|---|---|---|---|
| 1 | Land Area |  | 7 | Sea Area |  |
| 2 | Built-Up Area |  | 8 | Unsurveyed Area |  |
| 3 | Caution Area |  | 9 | Lake |  |
| 4 | Restricted Area |  | 10 | Anchorage Area |  |
| 5 | Road |  | 11 | Lights |  |
| 6 | Fairway |  | 12 | Buoys, Beacons |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhang, A.; Gao, M.; Liang, Y. Research on Three-Dimensional Electronic Navigation Chart Hybrid Spatial Index Structure Based on Quadtree and R-Tree. ISPRS Int. J. Geo-Inf. 2022, 11, 319. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi11050319
Zhang Y, Zhang A, Gao M, Liang Y. Research on Three-Dimensional Electronic Navigation Chart Hybrid Spatial Index Structure Based on Quadtree and R-Tree. ISPRS International Journal of Geo-Information. 2022; 11(5):319. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi11050319
Chicago/Turabian StyleZhang, Yunong, Anmin Zhang, Miao Gao, and Yi Liang. 2022. "Research on Three-Dimensional Electronic Navigation Chart Hybrid Spatial Index Structure Based on Quadtree and R-Tree" ISPRS International Journal of Geo-Information 11, no. 5: 319. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi11050319