1. Introduction
Pedestrian Dead Reckoning (PDR) [
1,
2] is a priority technique for the first responder ubiquitous positioning system. Several positioning algorithms have been developed over the past ten years.
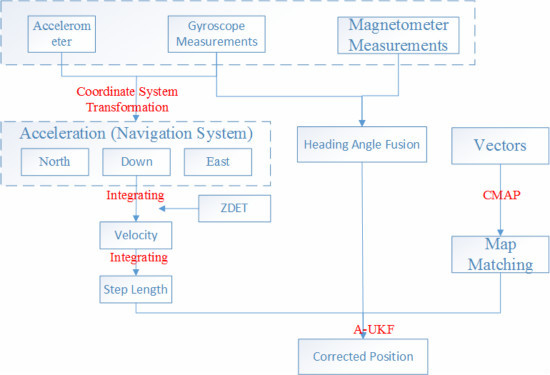
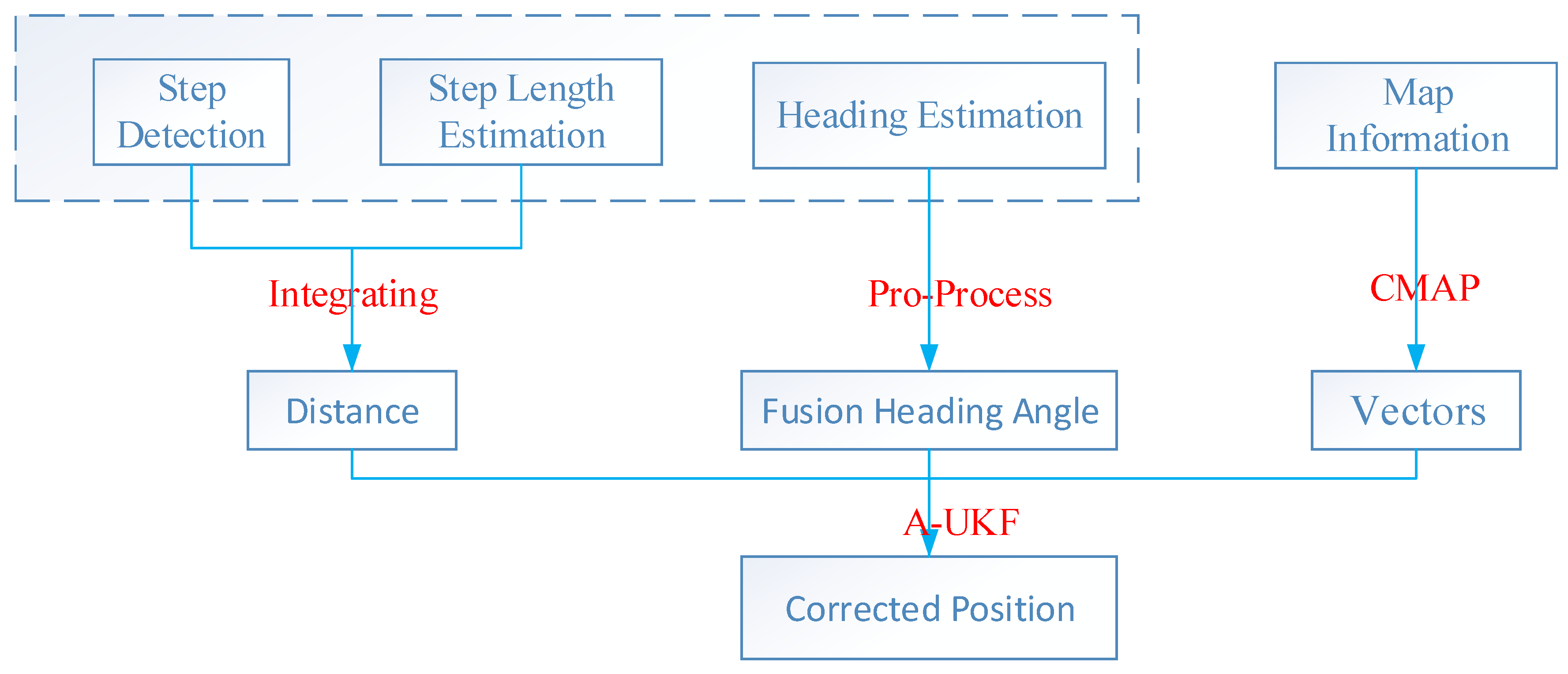
The basic PDR model involves three components: step detection, step length estimation and heading angle estimation [
3,
4]. Acceleration measurements are an ideal choice for step detection because of the periodicity of a pedestrian’s walking pattern. They require little or no infrastructure for pre-installation in buildings, but without an external reference, errors quickly accrue [
5].
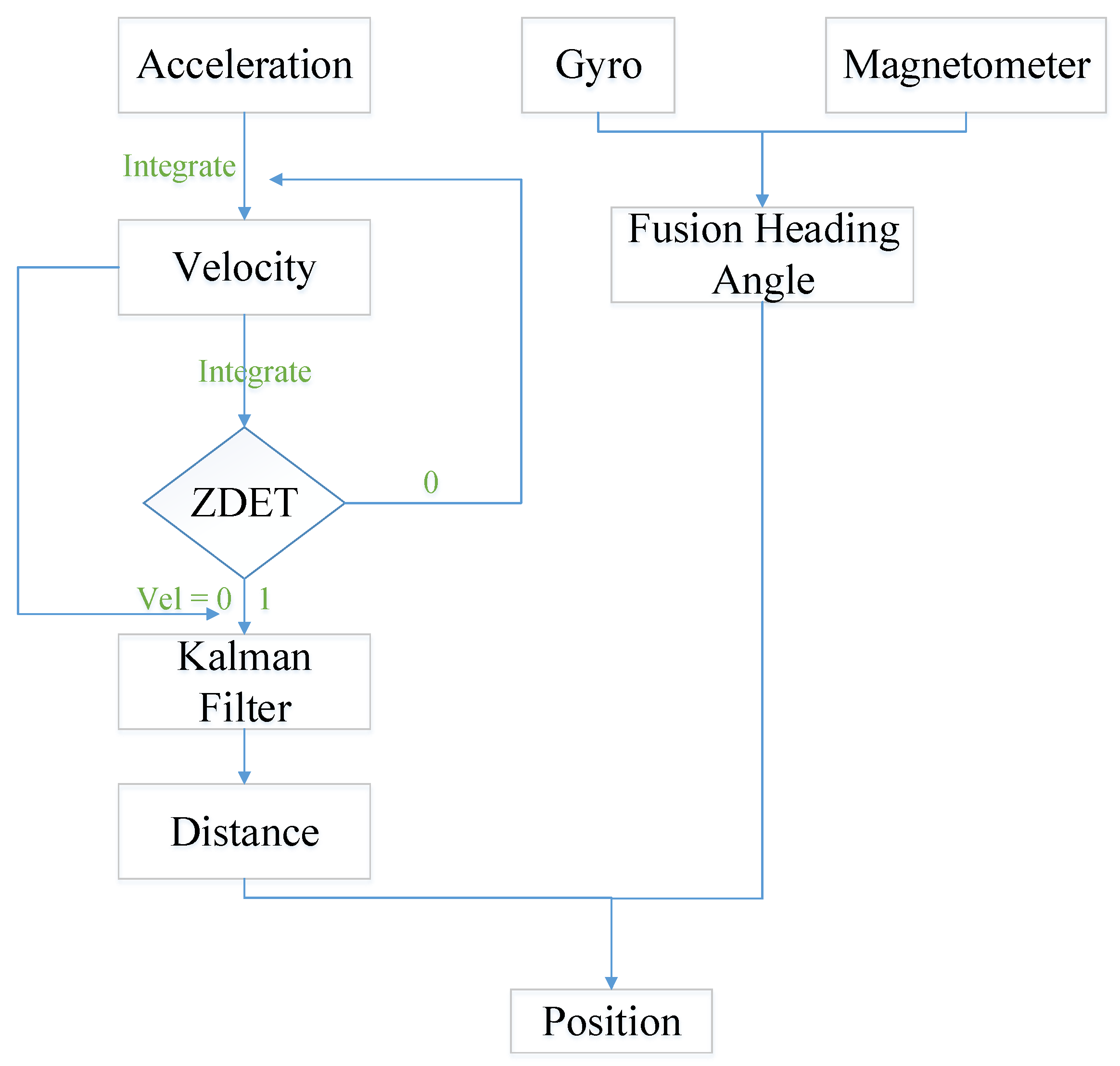
In a standard PDR algorithm, the step number and length are detected using the threshold for vertical acceleration, and the accuracy of the results is not as good as that of the estimates. In practice, while walking, the velocity of one foot should be zero when it is settled down. Therefore, considering the different walking patterns of different users, the Zero-velocity information, which can improve the position result, can be used to detect the step and calculate the step length.
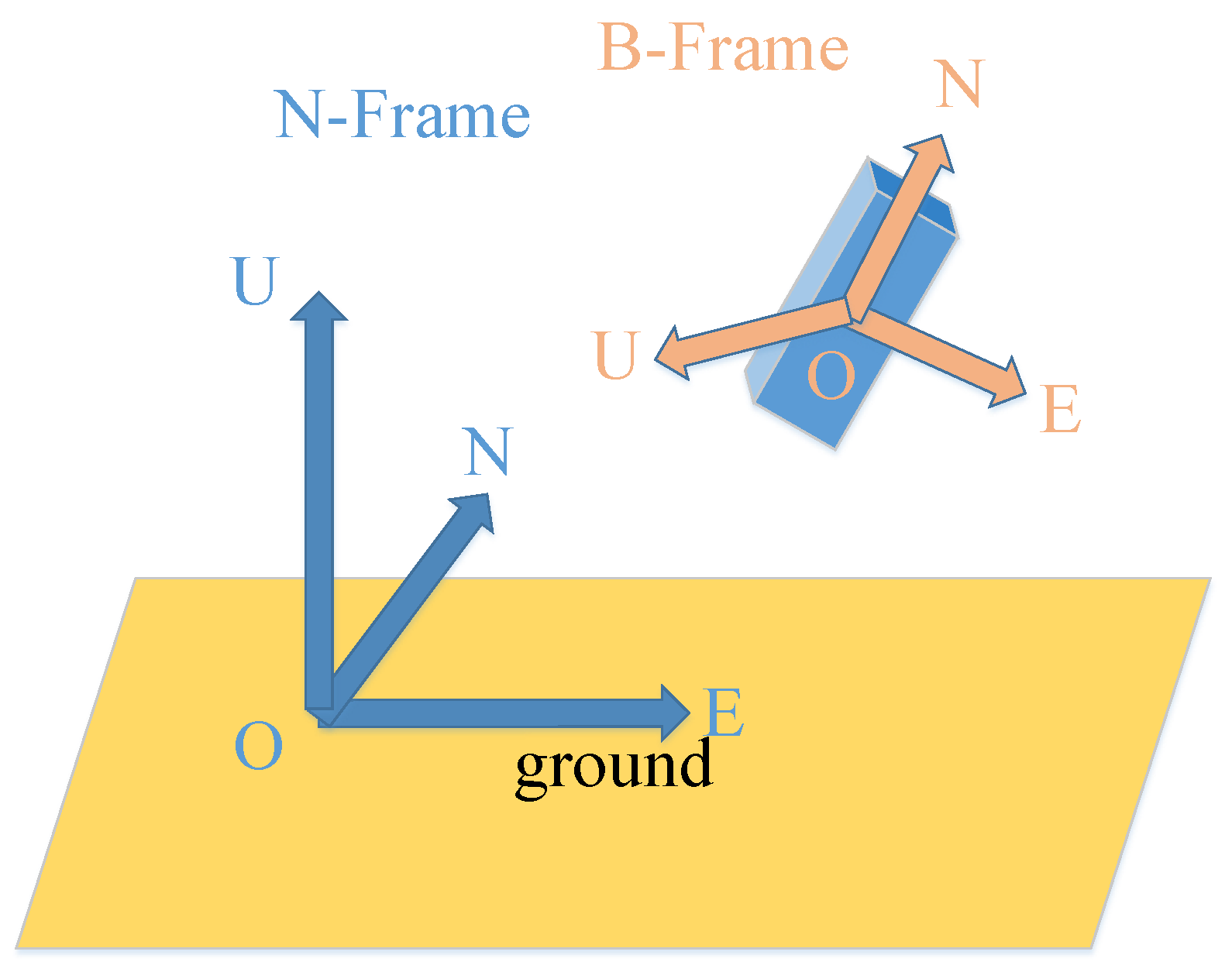
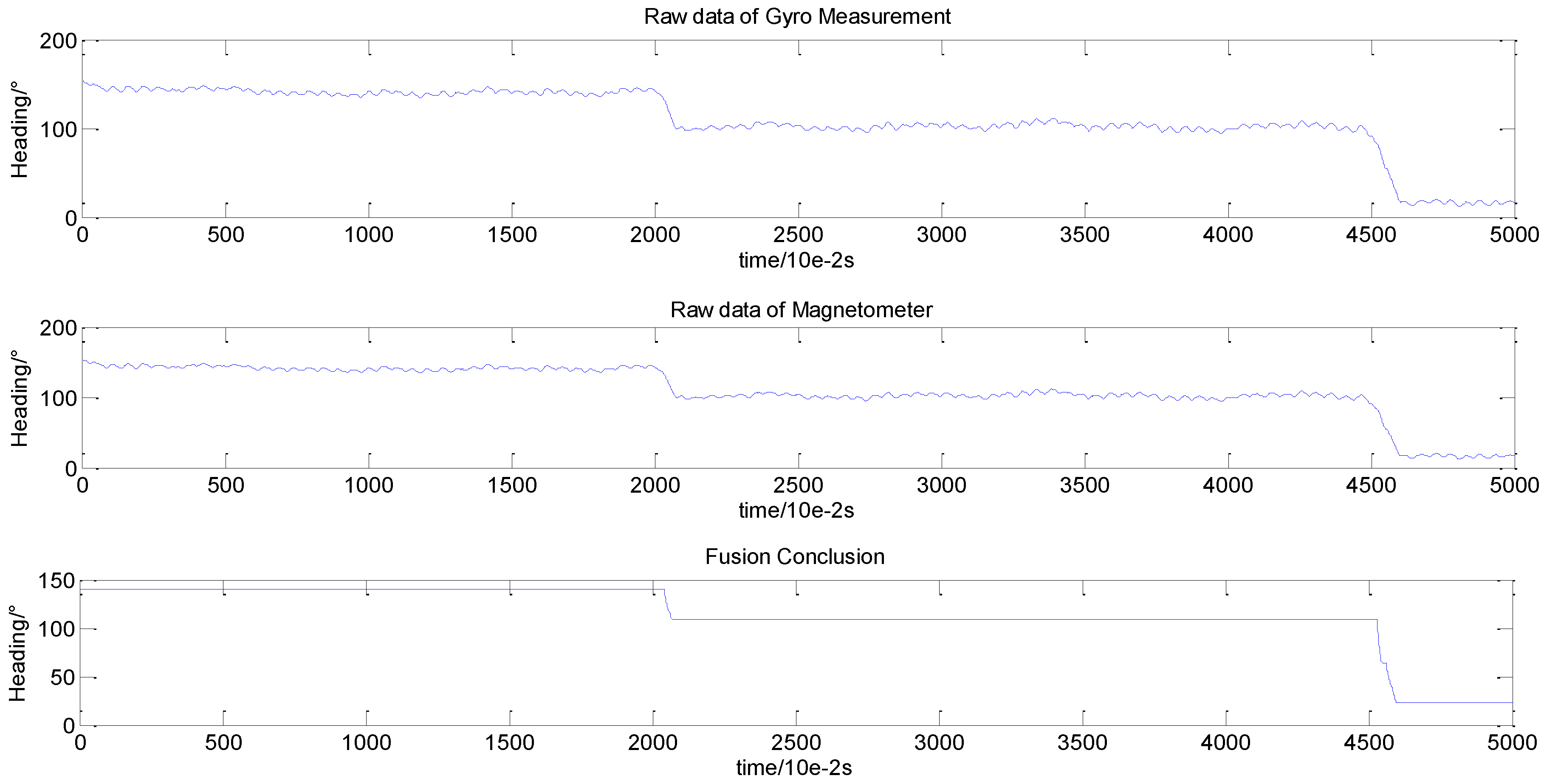
Meanwhile, orientation determination is also an essential issue for the PDR algorithm that requires attention because the sensor is unlikely to be axis-aligned. It continuously rotates with respect to the Navigation frame (N-frame) during the walking cycle. We must, therefore, track the rotation of the sensor by using the angular velocities provided by the gyroscopes and the magnetic field strength (MFS) from the magnetometer. However, both have their associated limitations.
Moreover, as we know, measurement errors are inevitably present within the sensor data, and a triple integration results in a potentially cubic growth in time (drift). Taking the drift into account has implications on regularly closing the integration loop by applying external constraints to the system. The most widespread PDR constraint is provided by Zero Velocity Updates (ZUPTs) [
6,
7,
8], which is also used in this paper [
9].
Hence, floor map information is important for this kind of research. To overcome the constraints we elaborated on before, a floor map can be used to further calibrate the bias and correct for unreasonable positioning results, keeping the walking trace under control. It works by rectifying the weight of the position information or correcting the heading angle, among others. For example, combining gyroscope measurements with the use of a floor map allows the orientation to be corrected using only map aids [
10,
11], and large heading errors are eliminated via long-range geometrical constraints exploited by Particle Filters (PFs) [
2,
11,
12]. Unfortunately, the large number of particles makes such algorithms unrealistic in terms of real-time operations. Hence, the unscented Kalman filter, which requires a limited number of particles (2
n+1, where
n denotes the dimension of the state vector) and still confers the advantage of a Kalman filter, has been chosen for this study.
In addition, it is also well recognized that there exist many surveys on various positioning systems in the literature such as WiFi [
13,
14], UWB [
15,
16], RFID [
17,
18], Zigbee [
19,
20], and Image-Based Location (IBL) [
21,
22], among others. However, most of them require a fundamental facility to support their detection. In this paper, zero-velocity is detected and used to develop an improved PDR model, and thereafter, it is used to fuse floor map topology to provide a more accurate position without any other hardware preparation.
In this paper, a scheme for indoor positioning by fusing the floor map and sensor data to obtain a real-time hybrid indoor navigation result is presented. Compared with the existing technology, integrating the zero-velocity detection method and high sampling frequency could improve the accuracy and sensitivity of step detection and step length estimation to some extent. Moreover, an adaptive unscented Kalman filter (A-UKF) is presented to fuse the map information with the improved PDR result, as a compromise for considering both accuracy and Computational Load (CL). In
Section 2, a type of zero-velocity detection method is proposed, and
Section 3 proposes the basic theory for map matching used in this method. Subsequently, a fusion algorithm based on an A-UKF is demonstrated in
Section 4. Then,
Section 5 details the methodologies used in this study.
Section 6 lists the equipment and environment for the experiments and the test designs to verify the accuracy and robustness of the idea, which is also analyzed. Finally,
Section 7 concludes the paper.
6. Experiment and Analysis
6.1. Equipment and Situation
We use a commercially available Inertial Measurement Unit, x-IMU, from x-io Technologies in UK.
Figure 12 shows this sensor. It is 55 × 35 × 18 mm (L × W × H) in size and almost 50 g in weight.
Figure 12.
Photos of the equipment and their usage: (a) the x-IMU and (b) foot-mount installation.
Figure 12.
Photos of the equipment and their usage: (a) the x-IMU and (b) foot-mount installation.
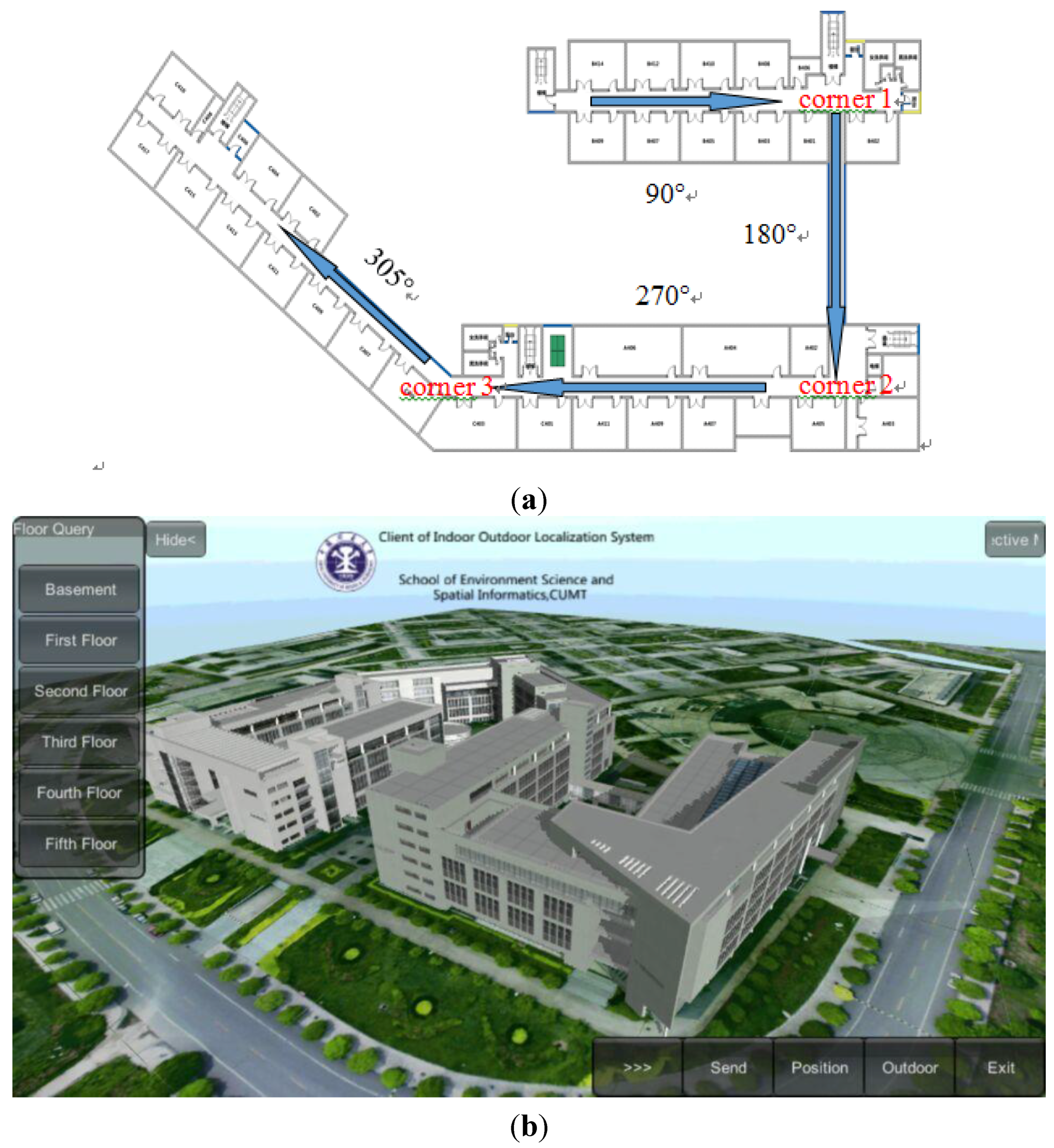
Figure 13.
Experimental site: (a) floor map of the fourth floor and (b) 3D model of the experimental site.
Figure 13.
Experimental site: (a) floor map of the fourth floor and (b) 3D model of the experimental site.
The x-IMU was designed to be the most versatile Inertial Measurement Unit (IMU) and Attitude Heading Reference System (AHRS) platform available. It hosts on-board sensors, a configurable auxiliary port and real-time communication via USB, Bluetooth or UART, which makes it both a powerful sensor and controller. The on-board SD card, battery charger (via USB), real-time clock/calendar and motion trigger wake up also make the x-IMU an ideal standalone data logger.
The x-IMU has three orthogonally oriented accelerometers, three gyroscopes and three magnetometers. The accelerometers and gyroscopes are MEMS solid state with capacitive readouts, providing linear acceleration and rate of turn, respectively. Magnetometers use a thin-film magnetoresistive principle to measure the Earth’s magnetic field.
The performance of each individual MEMS sensor within this facility is summarized in
Table 1. They suffer from a significant bias, and this bias also varies over time; therefore, PDR algorithms have the challenge of avoiding excessive error accumulation (drift) during integration.
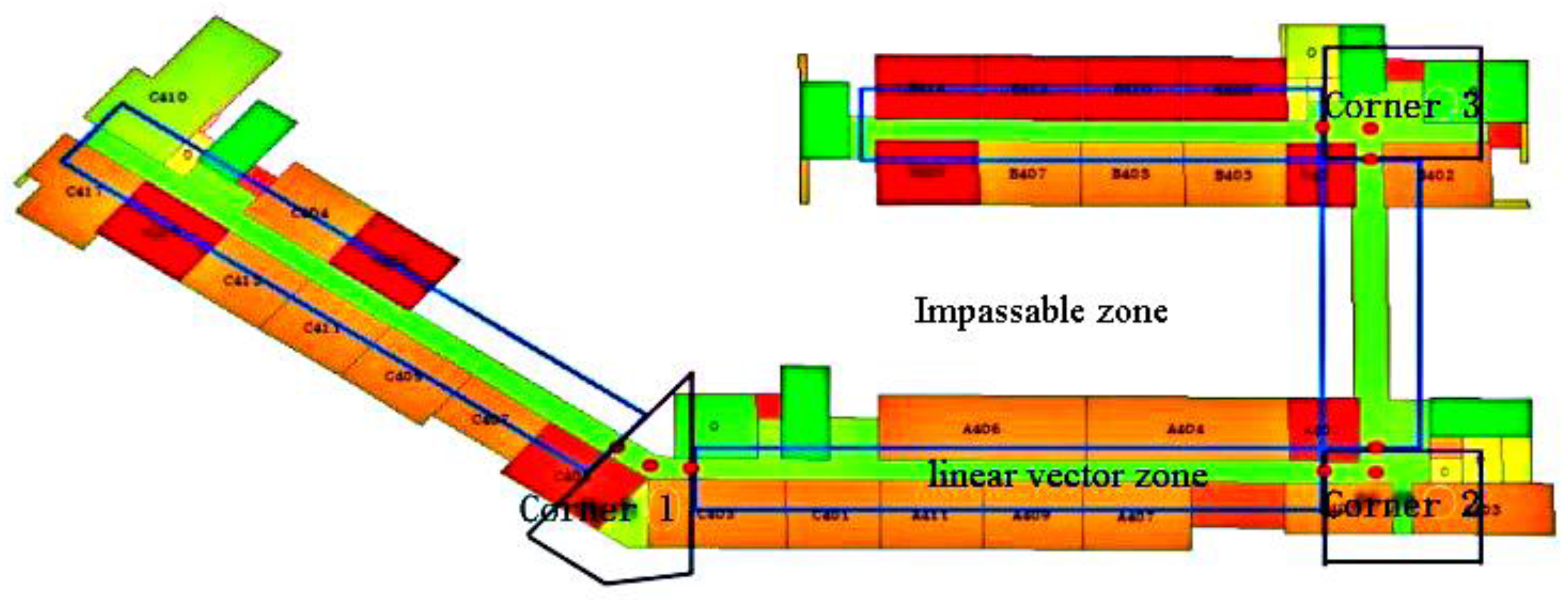
To verify the effectiveness of the proposed algorithm, a field experiment was performed on the fourth floor of the School of Environmental Science and Spatial Informatics (SESSI) building on the campus of China University of Mining and Technology (CUMT) in Xuzhou, Jiangsu, China. In
Figure 13a, blue arrows indicate linear corridors, and red “corners” indicate non-linear corridors and other areas that are unavailable for a person to pass through. A type of AHRS named x-imu produced by x-io Technologies Limited was used as the user terminal in the experiment; its technical specifications are shown in
Table 3.
Table 3.
Technical specifications of the IMU.
Table 3.
Technical specifications of the IMU.
| Instrument | Scale Factor | Random Walk |
|---|
| Accelerometer (m/s2) | 10.3333 | ±0.0005 |
| Gyroscope (m/s2) | 5.2457 | ±0.0003 |
| Magnetometer (μT) | 800.0000 | ±0.0400 |
6.2. Experiment
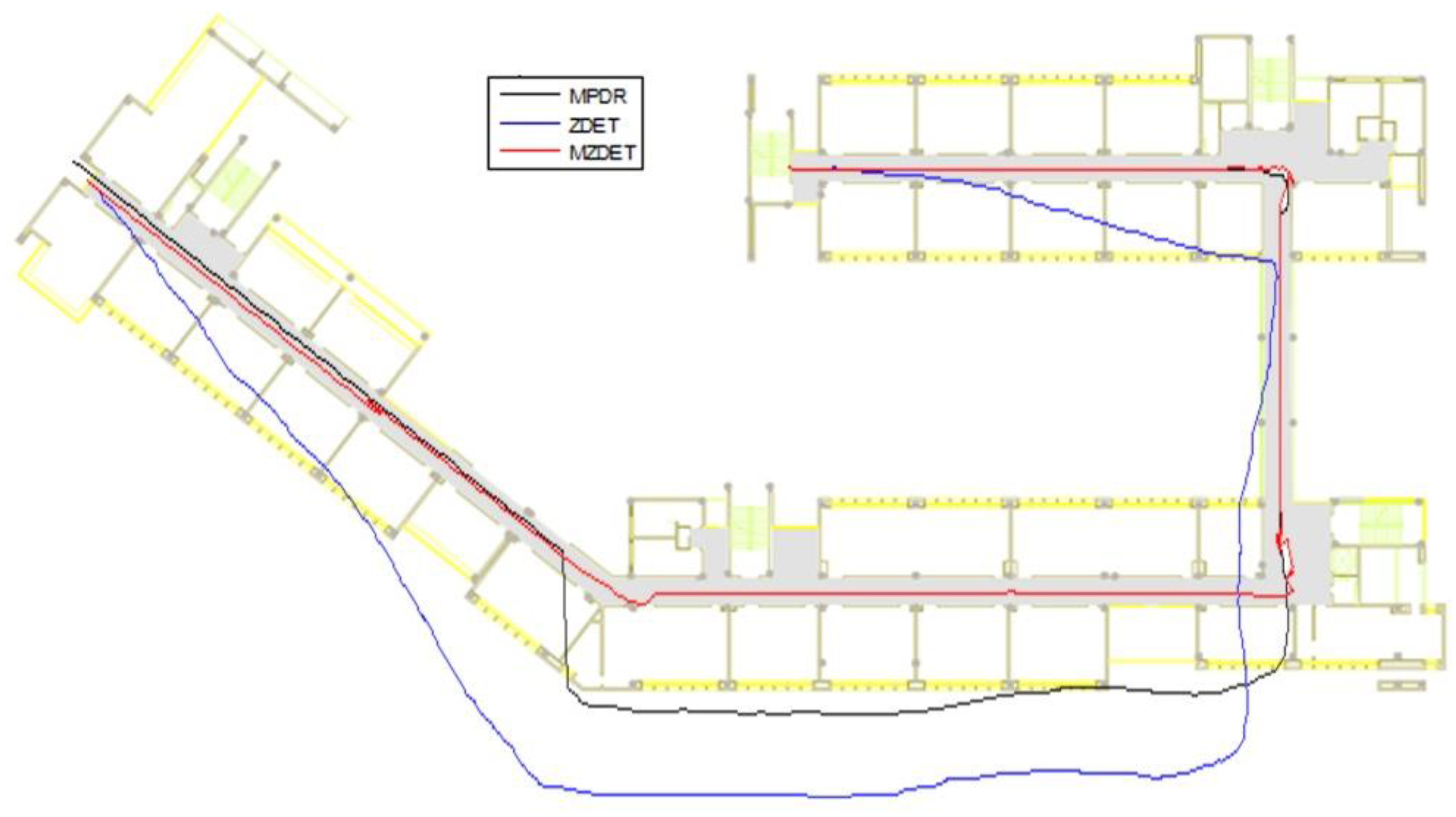
To compare the tracking results, four schemes were designed:
Scheme 1: Floor-map-aided PDR-based tracking result by hand-held smartphone (MPDR).
Scheme 2: ZDET-based indoor positioning test with ordinary data (ZDET).
Scheme 3: ZDET-based indoor positioning test with map-matching (MZDET).
Map matching (achieved by A-UKF) was used to correct the information from different sensors for Schemes 1 and 3. In Schemes 2 and 3, the ZDET was used for step detection and step length estimation, and the ordinary PDR was accepted by Scheme 1. The floor level should, in general, be determined in advance from Z-axis accelerometer measurements, although only 2D positioning was considered here.
Figure 14 shows the position trajectories for the three schemes. The colorful lines represent the travel paths calculated using the different schemes. In the test, the test participant walked with a uniform and stable gait; therefore, the true trajectory should be stable.
As seen from
Figure 15, the map-matching algorithm could help PDR eliminate the accumulated error, which should be an inevitable problem for classic PDR. However, some issues are still revealed to some degree; the step length estimation and step detection may be imprecise, and the error will be accumulated just as a black line in a block. Moreover, compared with ZDET, the positioning results of the MZDET are more accurate and rarely suffer from the influence of a variable heading angle.
Figure 14.
Estimated position of the three schemes.
Figure 14.
Estimated position of the three schemes.
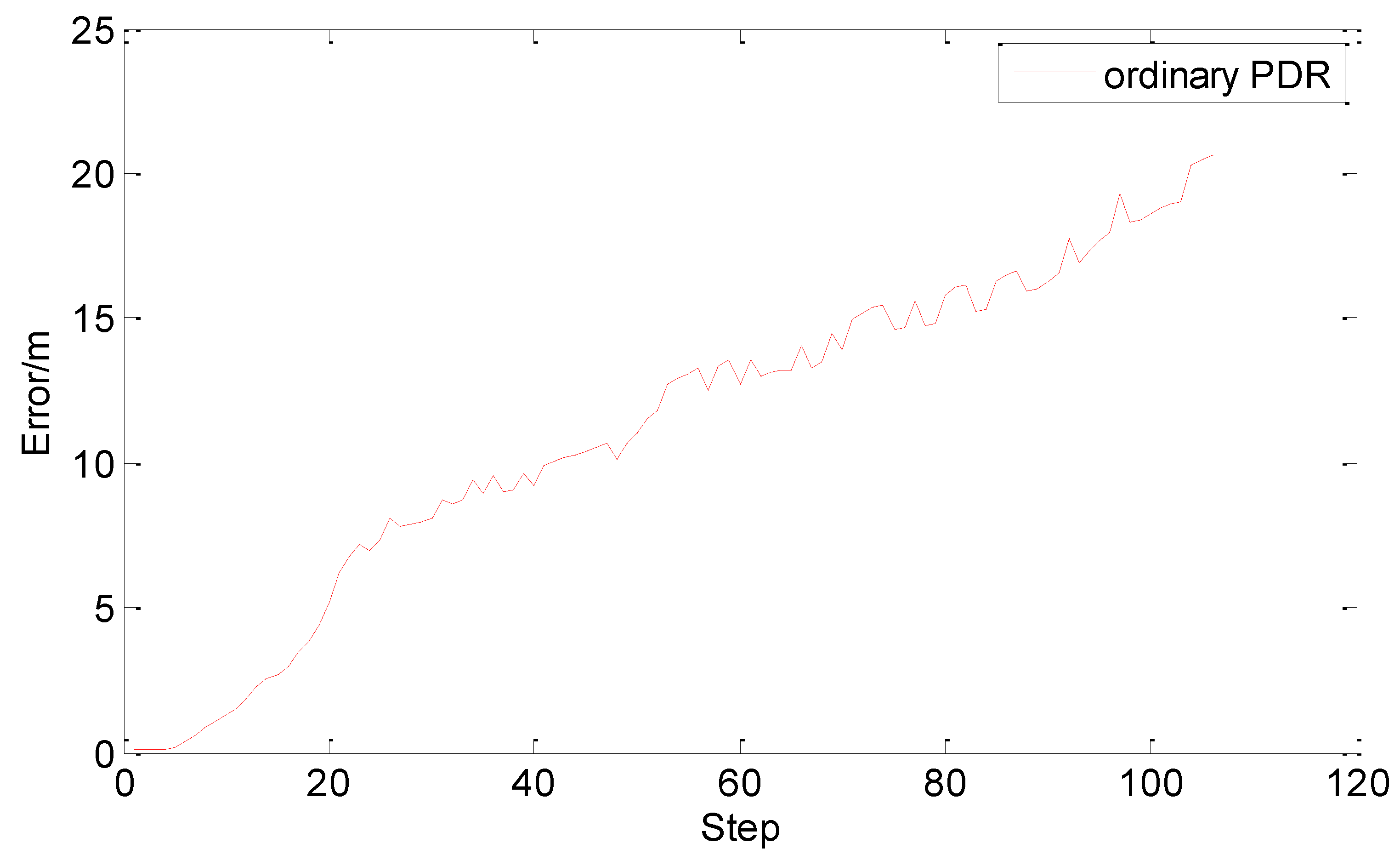
Figure 15.
The accumulated error of the PDR algorithm.
Figure 15.
The accumulated error of the PDR algorithm.
Moreover, compared with an ordinary PDR algorithm, the figure below illustrates that the UKF algorithm preserves the continuity and stability of the PDR algorithm while simultaneously restricting the accumulation of errors, thereby improving the positioning accuracy.
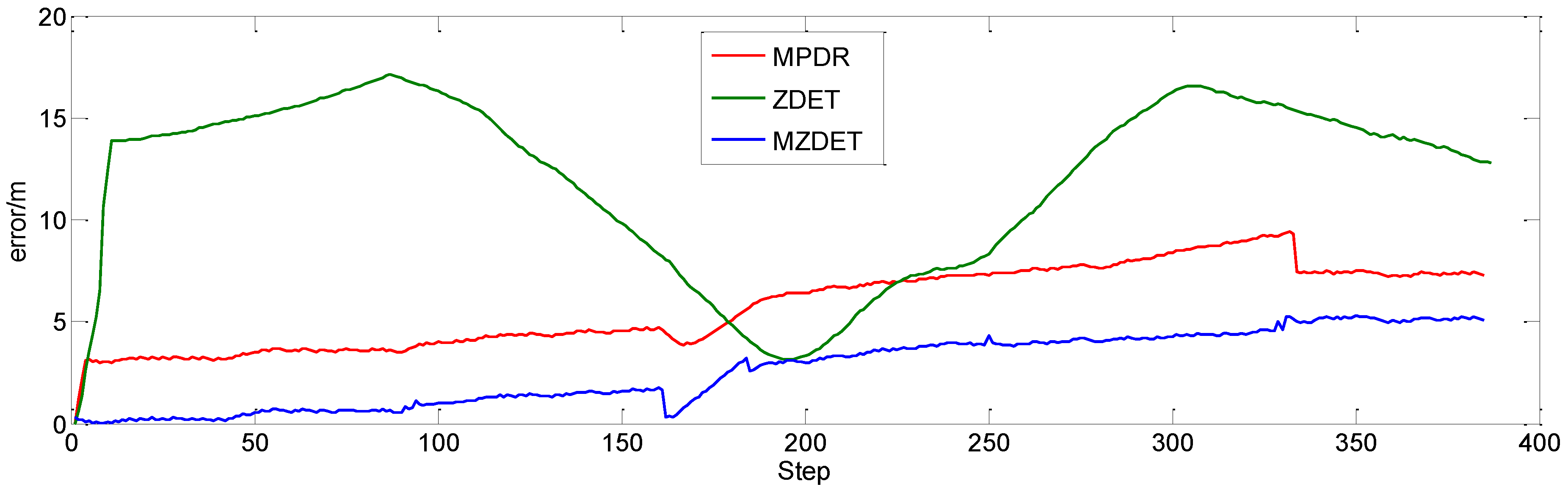
Figure 16 shows the step series of the position errors of the three schemes with respect to the reference positions provided by a master station. The largest errors of the MZDET integration algorithm were observed during hundreds of steps, which it shows much better than the other two methods.
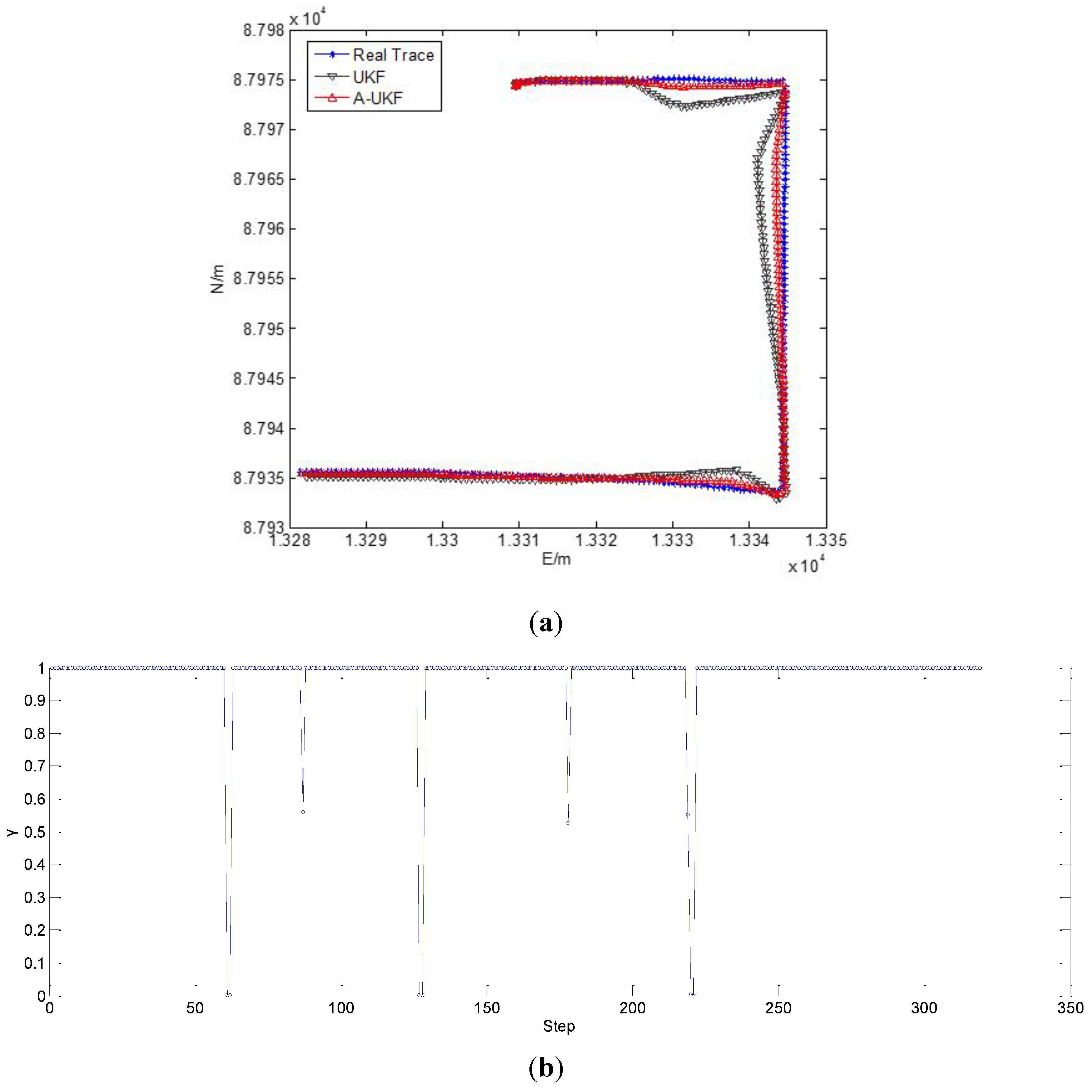
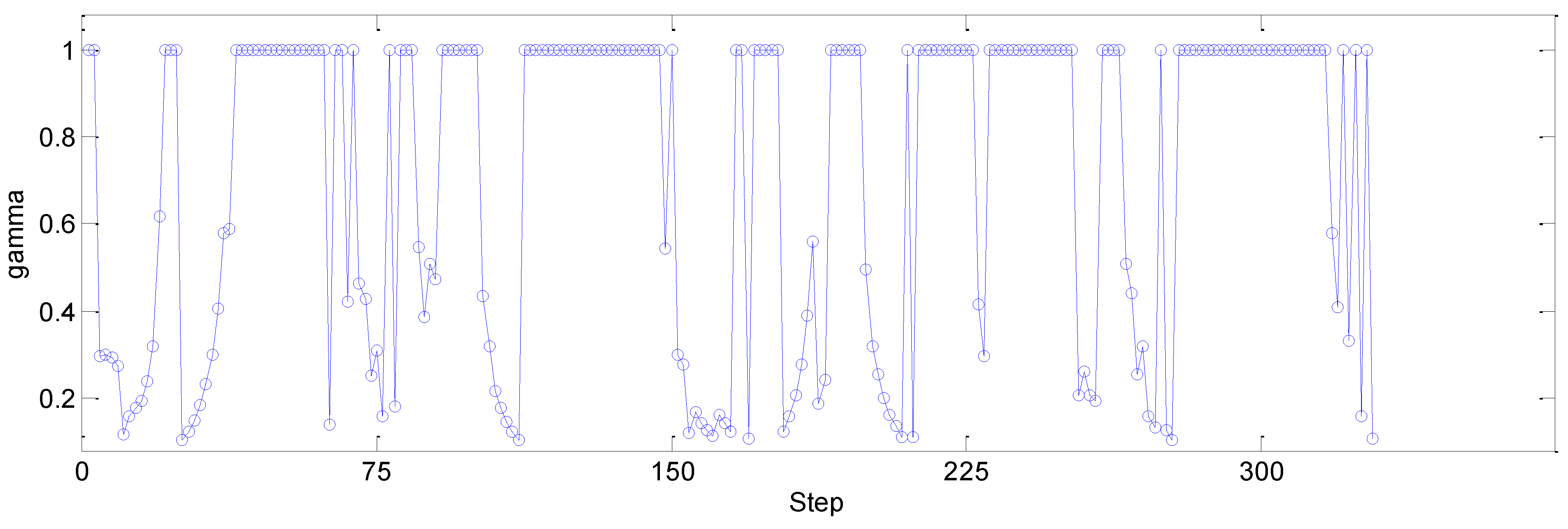
Moreover, we can see in
Figure 17 that when a gross error (huge error) is observed, the adaptive factor is able to react and rectifies it rapidly.
Figure 16.
The error step series of the three schemes.
Figure 16.
The error step series of the three schemes.
Figure 17.
The variance of the adaptive parameter.
Figure 17.
The variance of the adaptive parameter.
The MSE, the average error (AE) and the maximum error (ME) reveal that the map-aided ZDET algorithm achieved the most reliable and accurate positioning results. In this test, the accuracy indicated by the MSE of the integrated MZDET indoor positioning algorithm was improved by 78.3% compared with the pure ZDET algorithm, and the AE and ME were reduced by 73.8% and 69.2%, respectively. Compared with the MPDR algorithm, the MSE of the integrated WPO algorithm was improved by 32.2%, and the AE and ME were reduced by 39.5% and 53.7%, respectively (
Table 4).
Table 4.
Error analysis of the three schemes.
Table 4.
Error analysis of the three schemes.
| ERROR | MPDR | ZDET | MZDET |
|---|
| MSE/m | 4.443 | 13.903 | 3.011 |
| AE/m | 4.360 | 12.190 | 2.639 |
| ME/m | 11.427 | 17.142 | 5.285 |
As seen from the comparison, the integrated MZDET positioning algorithm results in an improvement in the accuracy, reliability, and calculation rate and a decrease in the accumulated error; therefore, this method is superior to the others to a certain extent.
6.3. Robustness Test
To demonstrate the robustness of the A-UKF integration algorithm for a foot-mounted indoor positioning system, some gross errors (three times the threshold of the step length covariance) were added to the step length observations as listed in
Table 5:
Table 5.
Gross errors added to the step length measurements.
Table 5.
Gross errors added to the step length measurements.
| Time (s) | 30 | 60 | 85 | 126 | 178 | 219 | 269 |
|---|
| s (m) | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
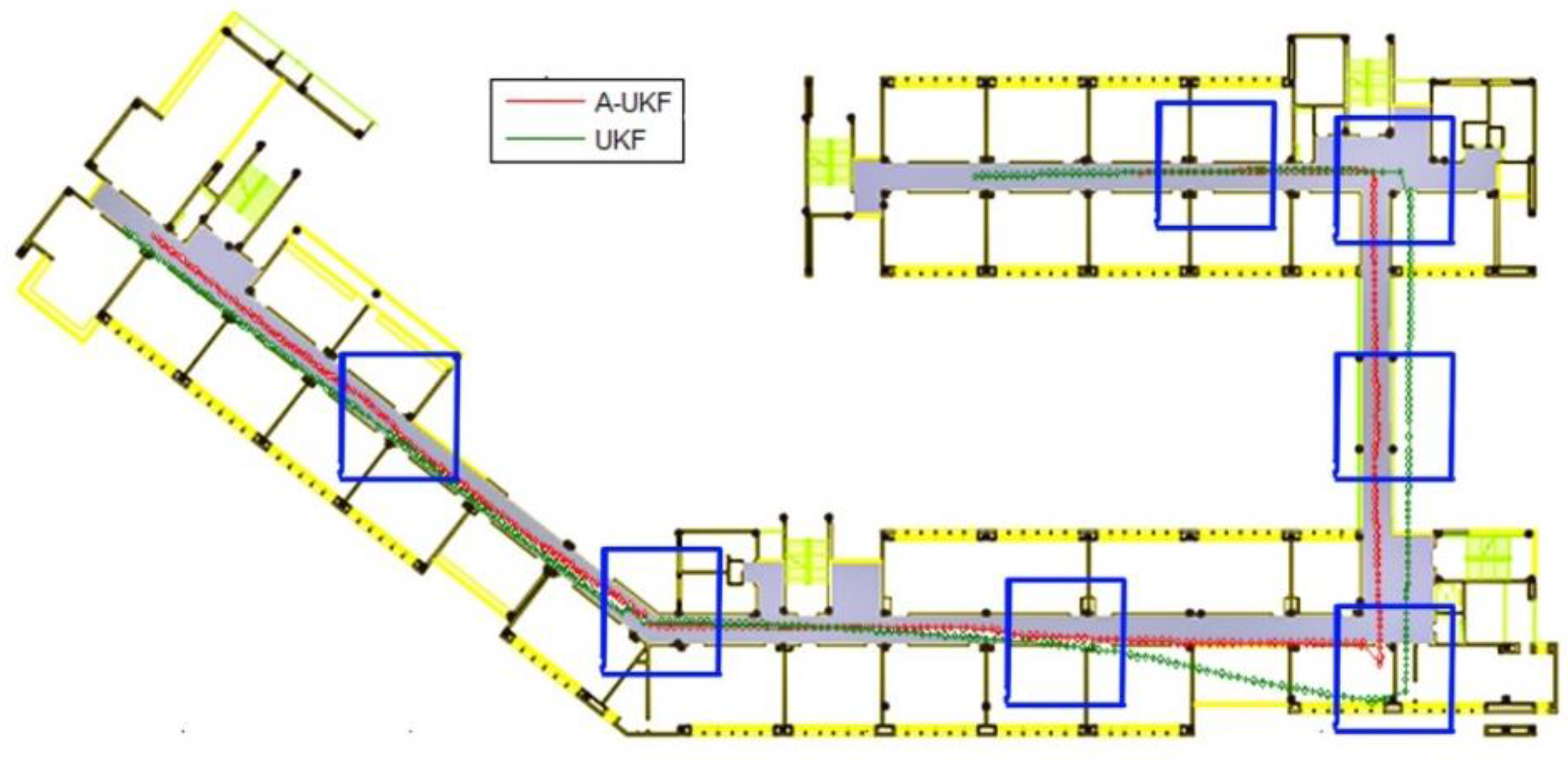
Figure 18 illustrates the positioning trajectories determined using the UKF algorithm and the A-UKF algorithm. As shown in
Table 6, seven gross-error-contaminated points, which cause the trajectory to be deteriorated, are observed around each corner and linear corridor in
Figure 13a.
Table 6 shows the residuals of these two algorithms for each affected time point (as shown in the table before), and the results demonstrate that the A-UKF algorithm achieves a much higher reliability and accuracy.
Figure 18.
Estimated position based on A-UKF and UKF.
Figure 18.
Estimated position based on A-UKF and UKF.
Table 6.
Residuals of the gross-error epochs.
Table 6.
Residuals of the gross-error epochs.
| Time (s) | UKF(m) | A-UKF (m) |
|---|
| 30 | 1.50 | 1.39 |
| 60 | 1.99 | 0.43 |
| 93 | 3.00 | 0.32 |
| 126 | 2.57 | 0.58 |
| 172 | 1.84 | 0.76 |
| 219 | 1.48 | 1.08 |
| 269 | 1.50 | 1.05 |
Gross errors were also added to the θ
k measurements (three times the threshold of the heading angle covariance), as listed in
Table 7, to verify the robustness of both algorithms. The resulting positioning trajectories obtained by using the UKF algorithm and the A-UKF algorithm are shown in
Figure 19. As shown in
Figure 19, the seven gross-error-contaminated points cause the trajectory to be deteriorated around the affected epochs as a result of the algorithms’ recursions.
Table 8 lists the residuals of the gross-error-contaminated epochs.
Table 7.
Gross errors added to the orientation measurements.
Table 7.
Gross errors added to the orientation measurements.
| Time (s) | 30 | 60 | 93 | 126 | 172 | 219 | 269 |
|---|
| θk (°) | +20 | +20 | +20 | +20 | +20 | +20 | +20 |
Figure 19.
Estimated position based on UKF and A-UKF.
Figure 19.
Estimated position based on UKF and A-UKF.
Table 8.
Residuals of the gross-error epochs.
Table 8.
Residuals of the gross-error epochs.
| Time (s) | UKF (m) | A-UKF (m) |
|---|
| 30 | 0.23 | 2.13 |
| 60 | 1.08 | 1.10 |
| 93 | 0.92 | 0.14 |
| 126 | 2.15 | 0.27 |
| 172 | 1.78 | 0.50 |
| 219 | 0.56 | 0.46 |
| 269 | 1.08 | 0.75 |
These results demonstrate that the A-UKF algorithm is more robust than the ordinary UKF algorithm, regardless of where the gross error originated.
These observations yield the following conclusions regarding the investigated positioning algorithms for indoor navigation systems.
- (1)
Considering the issue of step detection, a ZDET method was proposed to improve the accuracy of detection, thereby decreasing the fluctuation to an acceptable level and improving the accuracy of the entire algorithm.
- (2)
Despite the high accuracy provided by zero-velocity detection, PDR always requires a considerable precision of orientation, and therefore, most experiments using PDR require constraints to cope with the information obtained from the gyroscope or magnetometer. However, incorporating an electronic map of the structure by UKF into the analysis eliminates redundant operations, thereby helping to improve the computational speed and quality.
- (3)
Considering the stability of UKF, the adaptive parameter is integrated into the algorithm. The experiments show that compared with the classic UKF, A-UKF offers a much more powerful robustness, improving the positioning reliability and producing a dramatic upward shift in operating rate and quality.
- (4)
In view of the considerable CL of A-UKF, which could load upon read-time calculation on an ordinary smartphone, there is the possibility of quasi-real-time measurements using mobile phones instead of a central computer, as has generally been used in other recent experiments.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















