
Combining 2D Mapping and Low Density Elevation Data in a GIS for GNSS Shadow Prediction


Abstract
:1. Introduction
- Combining readily available 2D vector data with low-density 3D data to create the Digital Surface Model (DSM).
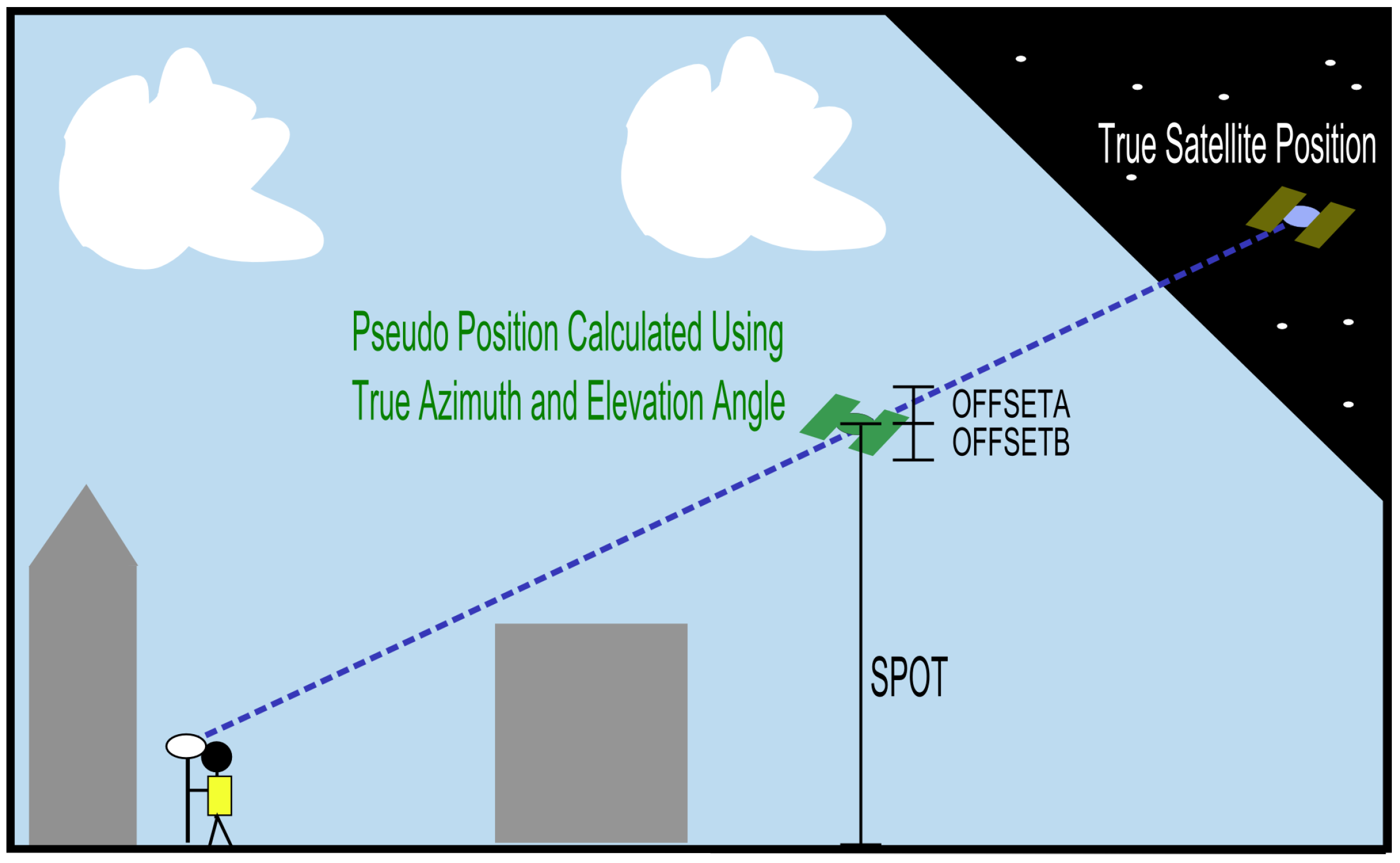
- Reversing output from GNSS shadow prediction tools to calculate pseudo-satellite positions.
- Applying a GIS viewshed with distant observer points in a different coordinate system.


2. Background and Related Work
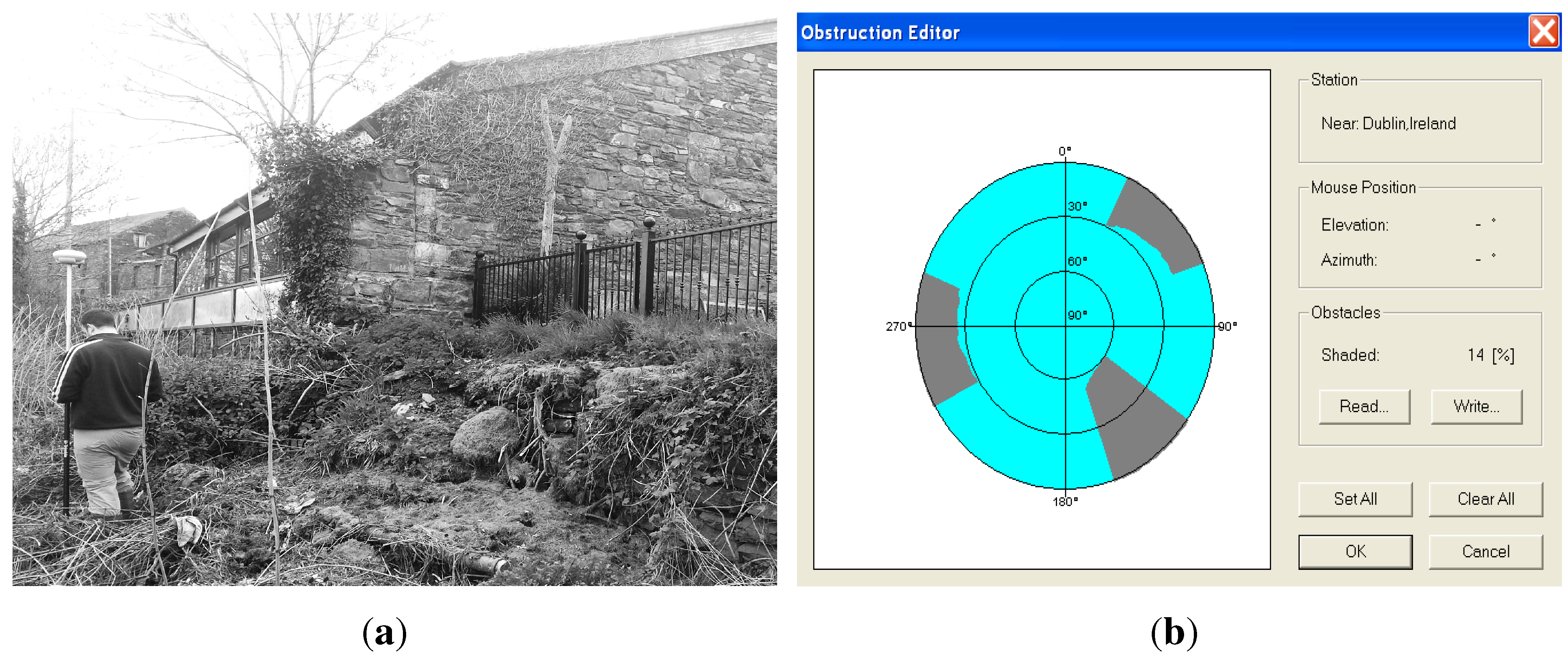
2.1. Modelling Obstructions
2.1.1. Modelling with 3D Vectors
2.1.2. Modelling with 2.5D Rasters
2.1.3. Proposed Substitution of 2D Vector Files and Basic 3D Data
2.2. Satellite Location
2.3. Visibility Calculation in a GIS
3. Datasets
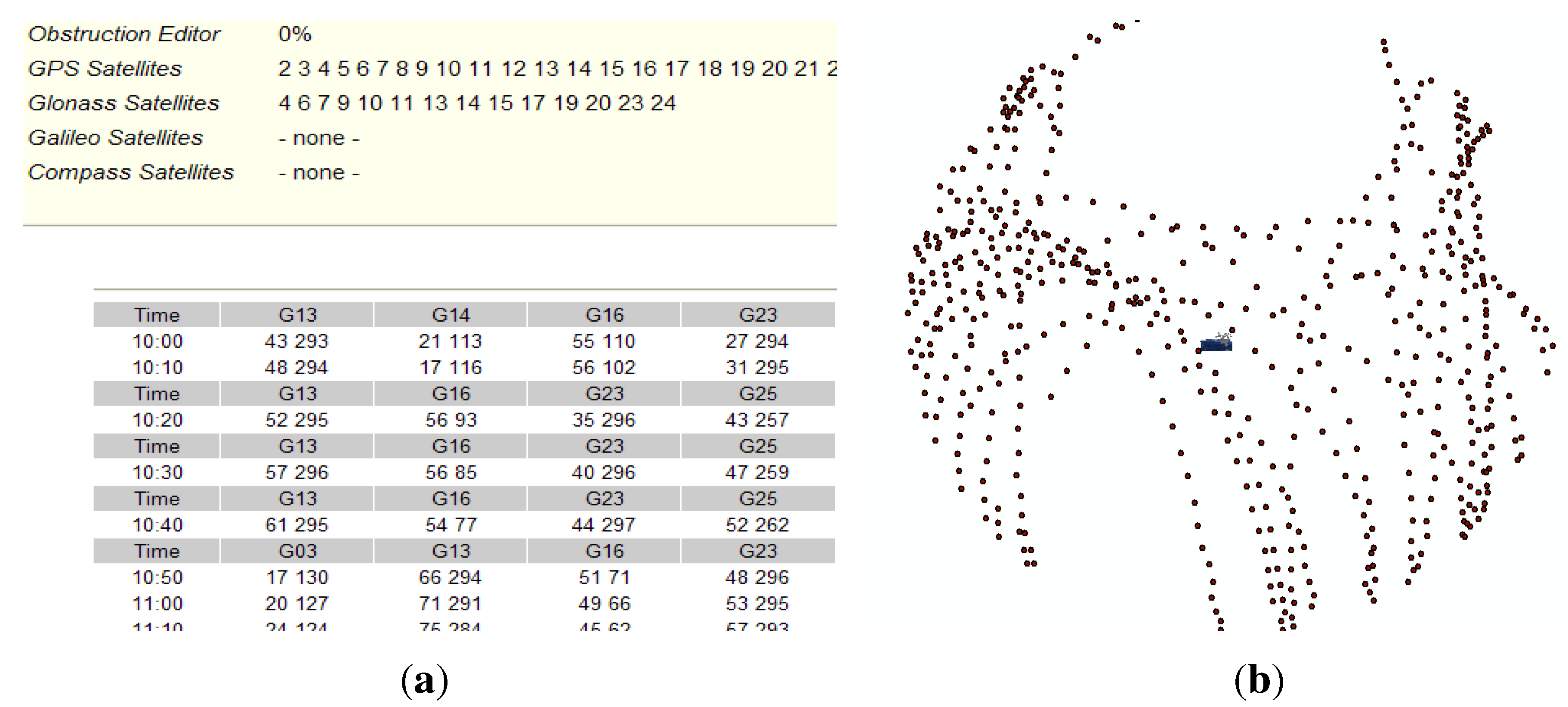
3.1. GNSS Almanac/Trimble Software
3.2. OSi Digital Mapping

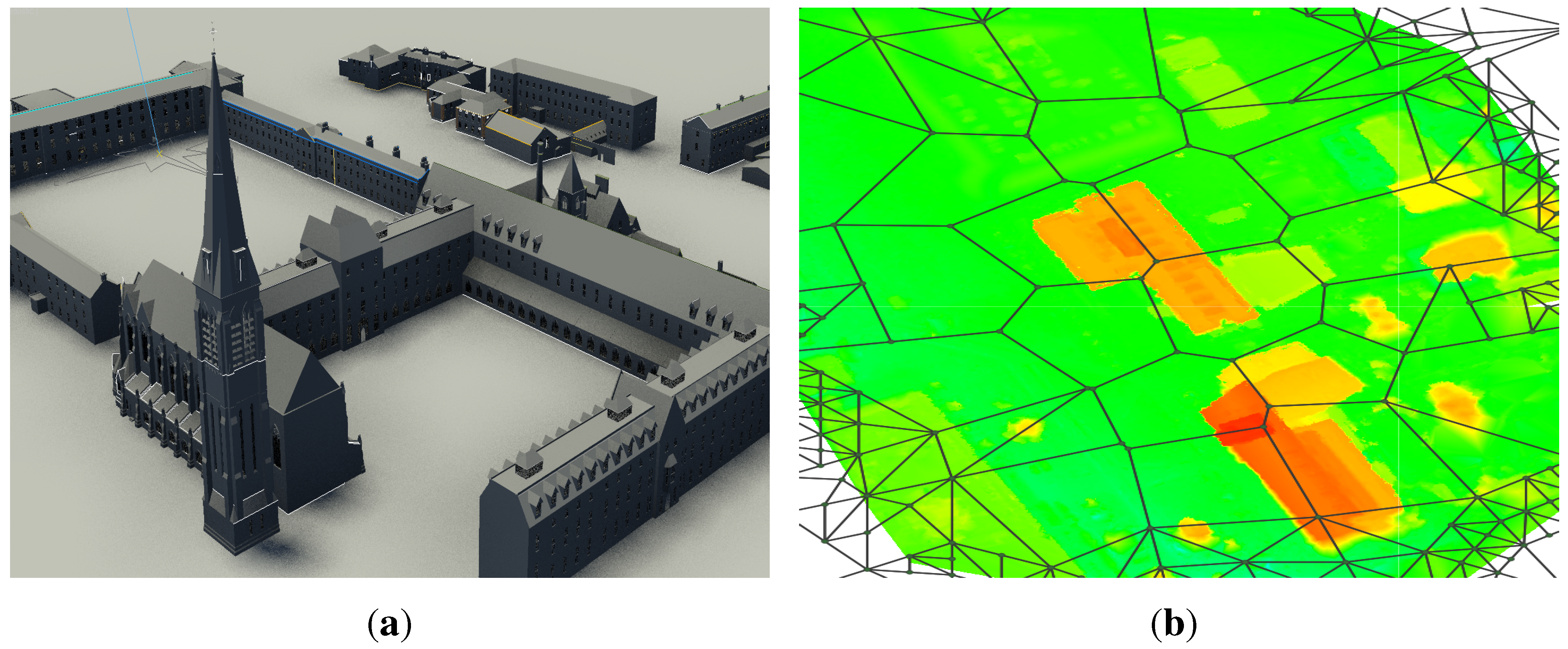
3.3. 3D Campus
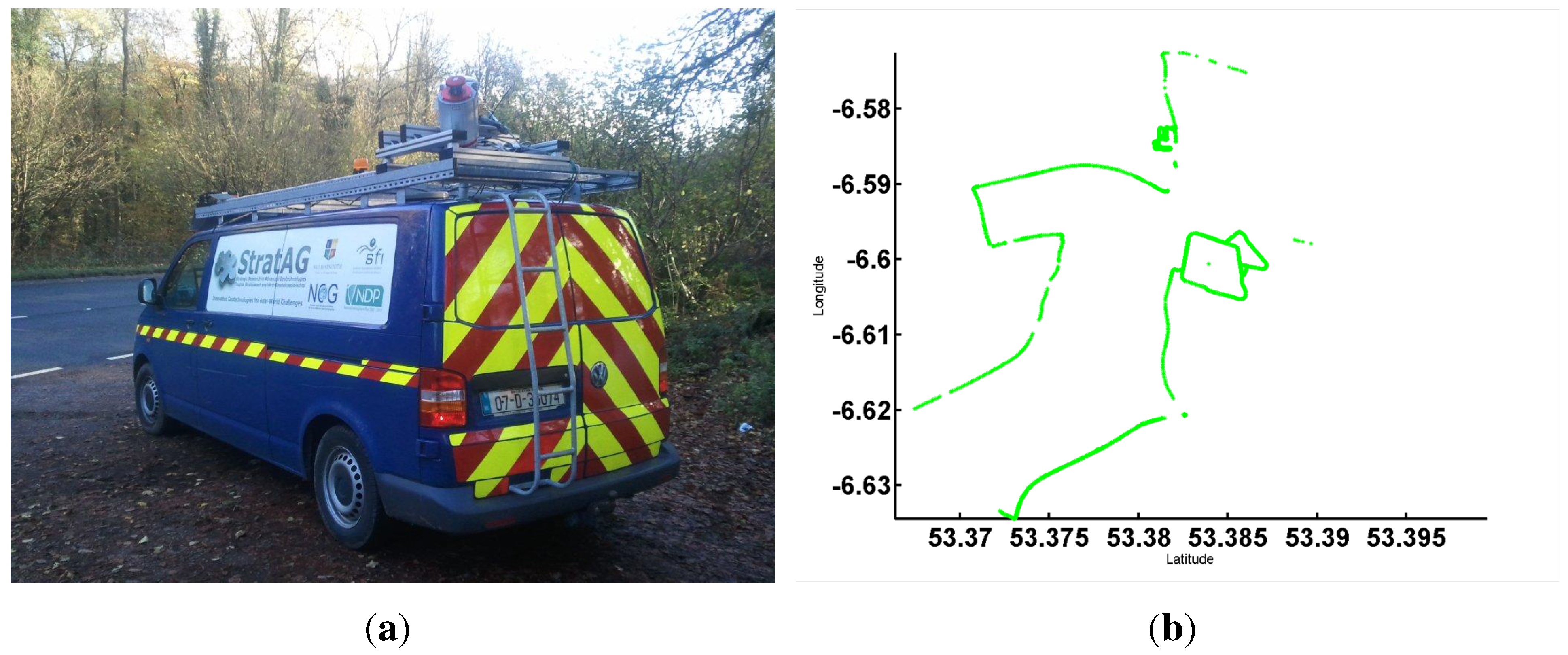
3.4. Trimble R8 GNSS Survey Data
4. Methodology
4.1. Calculate Satellite Positions
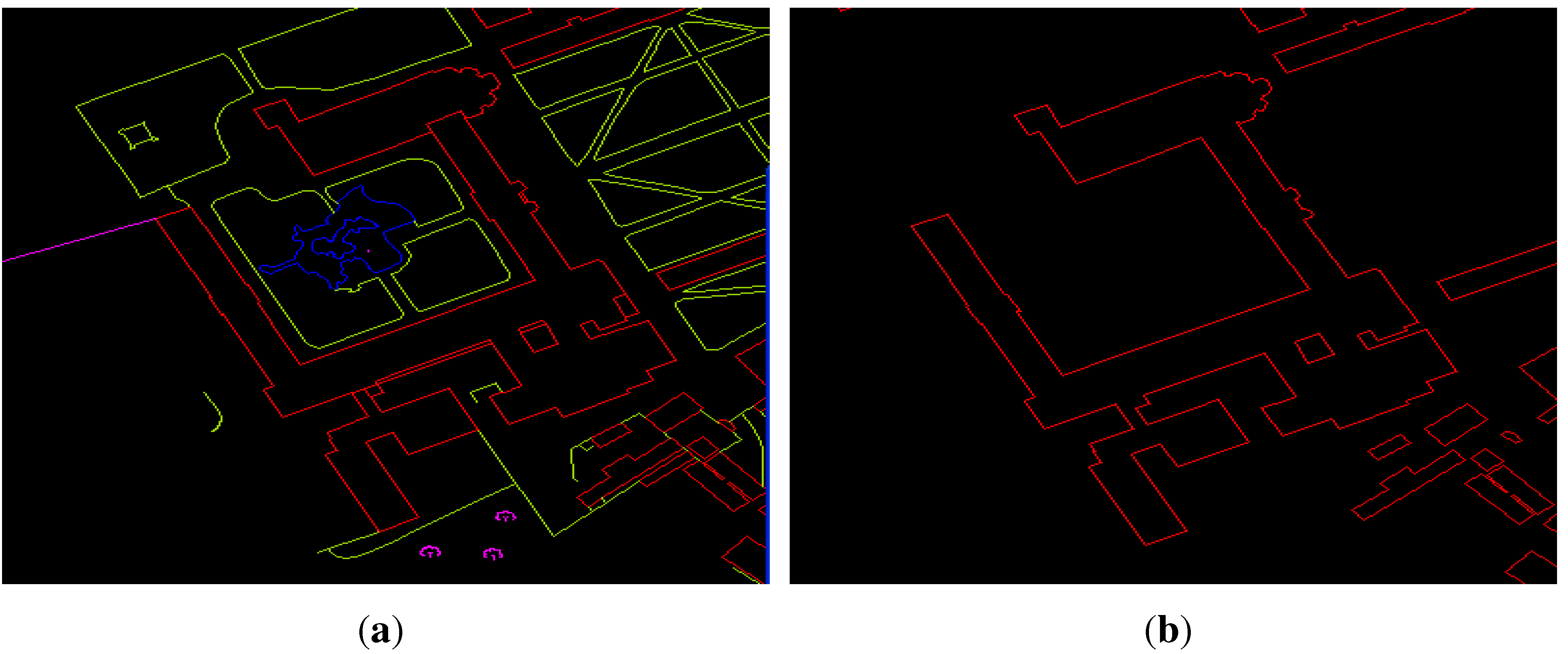
4.2. Extract 2D Vector Building Polygons
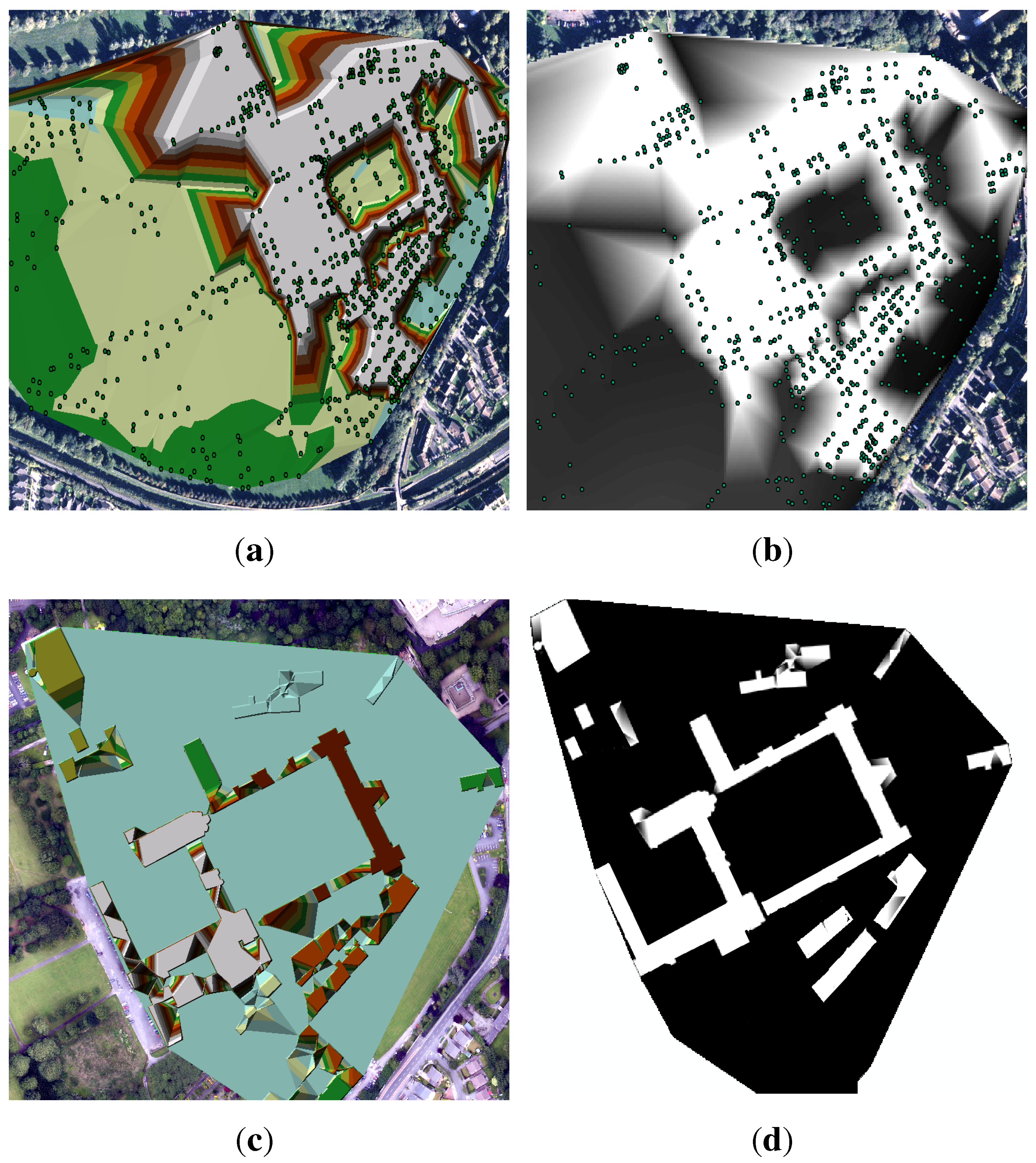
4.3. Create 2.5D Raster Campus

4.4. 3D Analyst Viewshed GIS Calculation


5. Results and Discussion
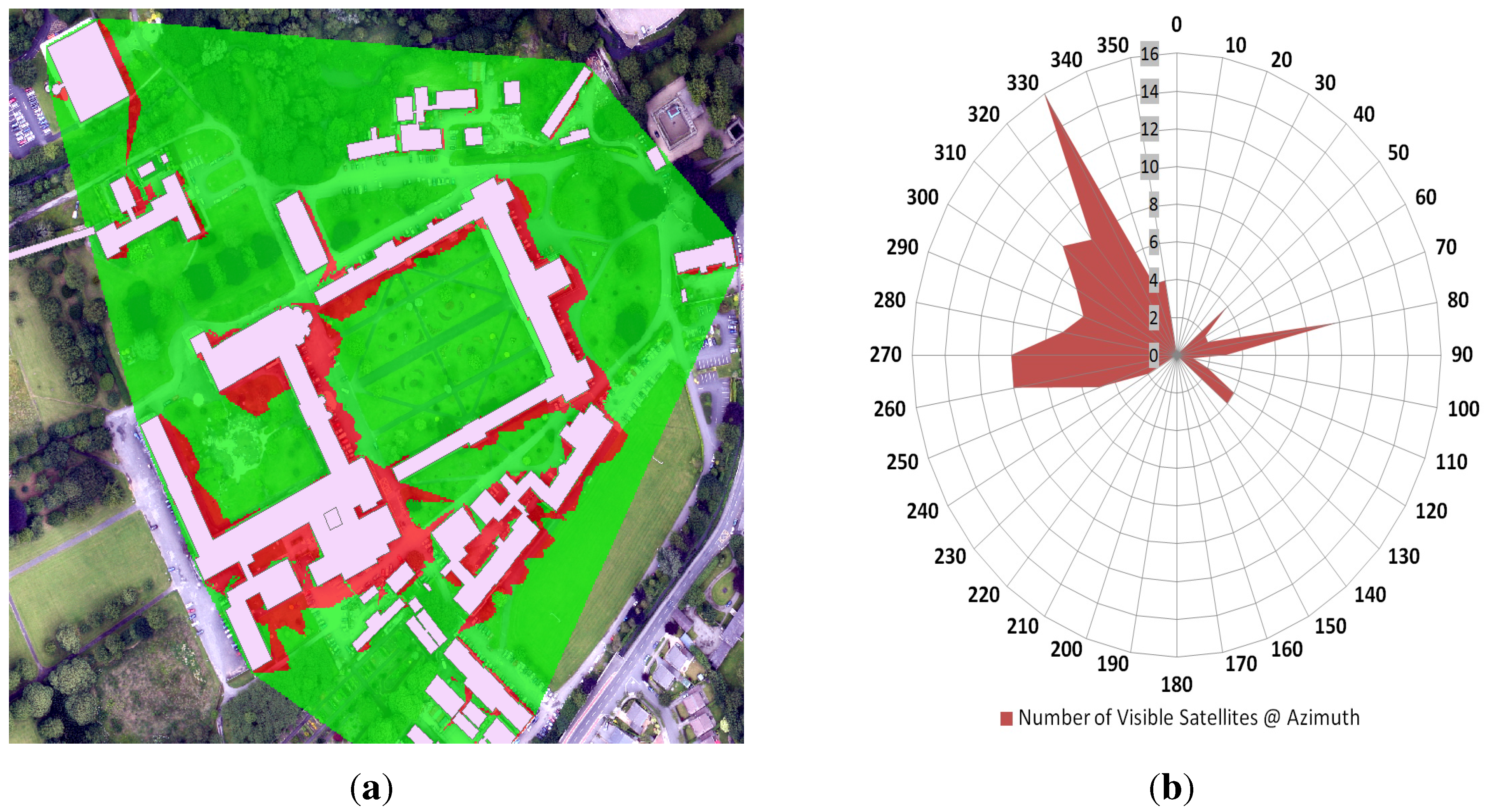
5.1. Interpretation of GNSS Prediction Results
- The long slender shadow to the south of the central courtyard in the prediction results was caused by the tall spire of the cathedral on campus, which is over 80 m in height.
- Areas of the smaller courtyards were almost completely in shadow, implying that if a surveyor were operating in that area they would find it extremely difficult to acquire any GNSS signal, as would be expected in real life.
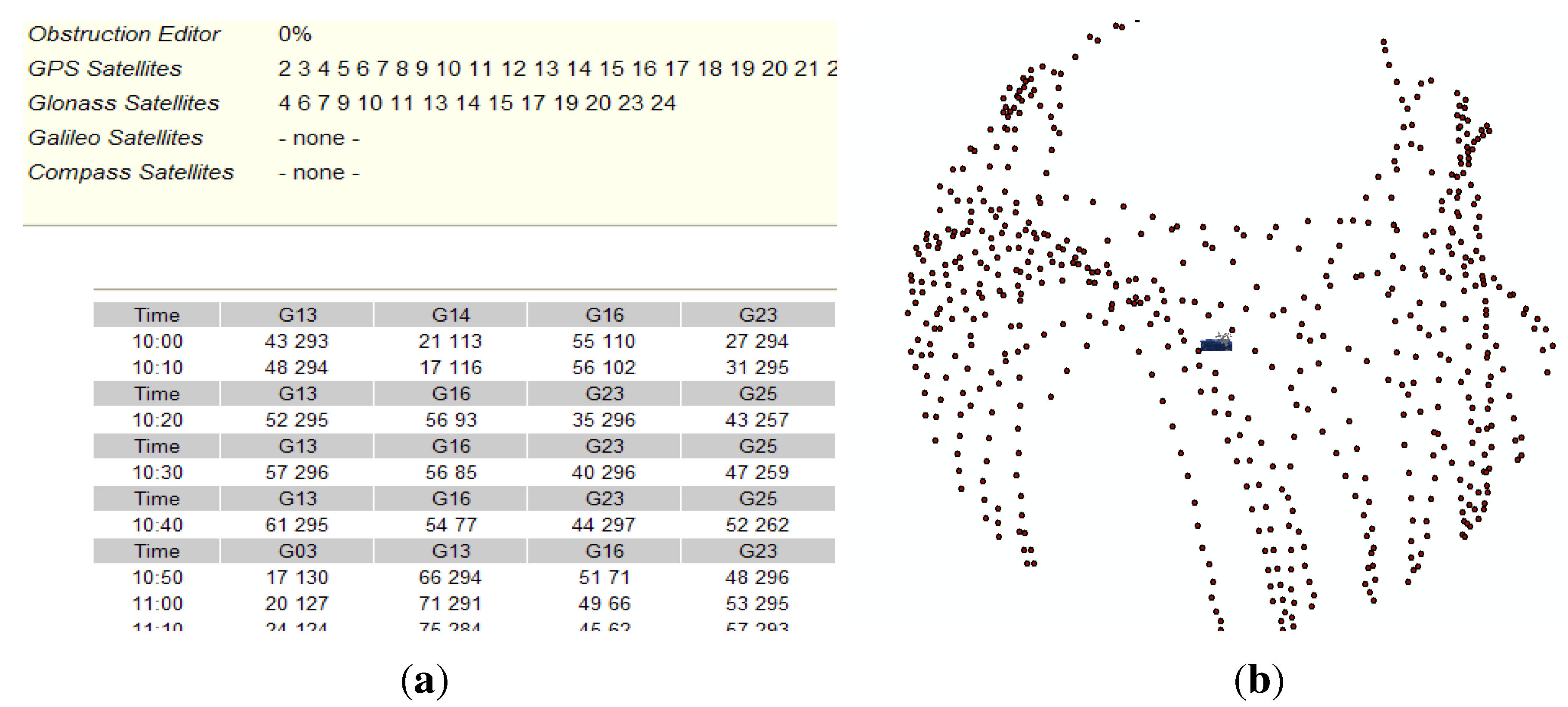
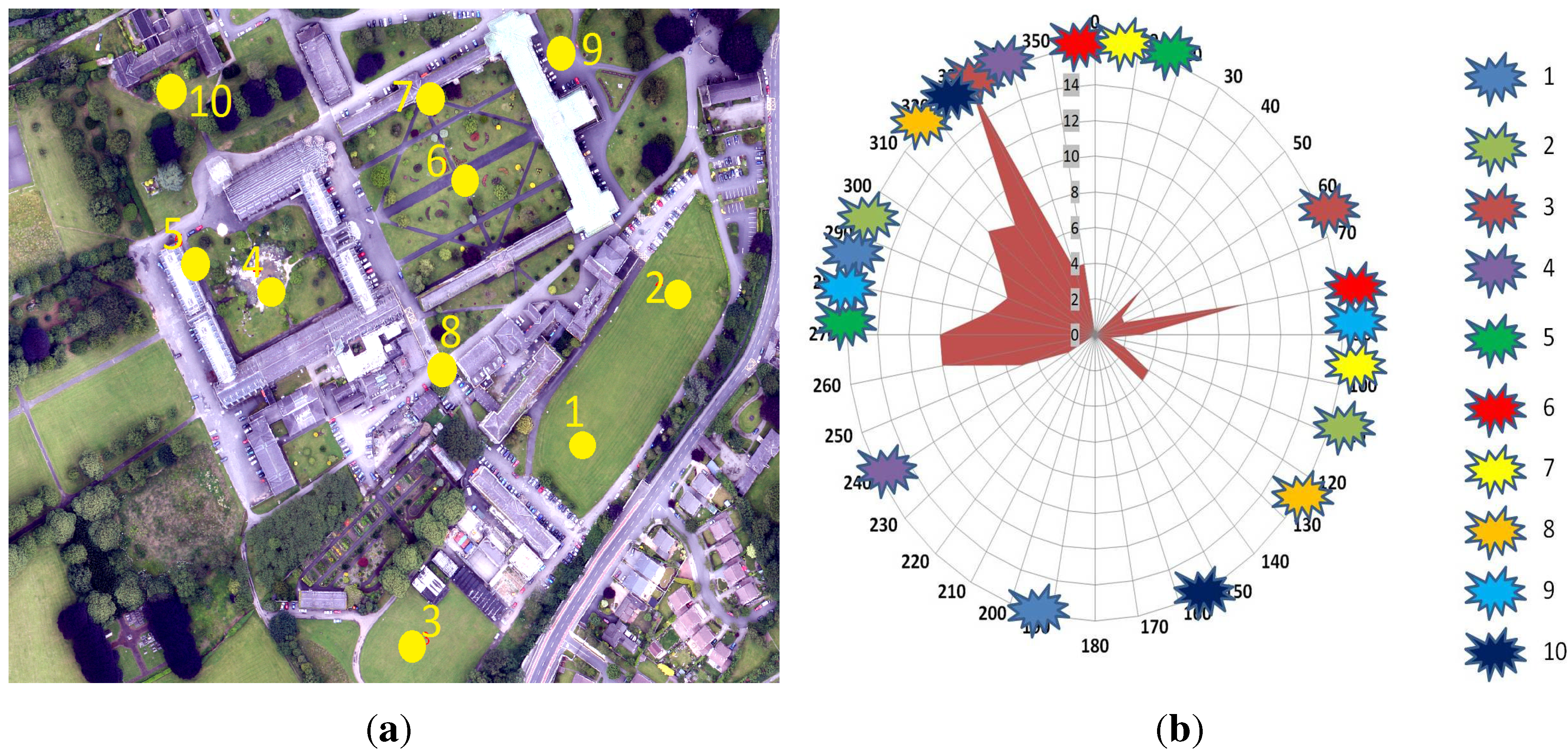
- This shadow was potentially caused by a satellite in the southwest of the area that eliminated a shadow close to the building or a satellite high in the horizon in the northwest that was able to view part of the southern face of the building, thus eliminating the rest of the shadow in this area. Figure 9b proves that there were satellites in the southwest throughout the survey.
- Alternatively, there could be an error in the TIN in this area, as this building exhibited a triangular extension in Figure 7c. This was not apparent in the resulting raster DSM, however, so the ultimate cause is uncertain.
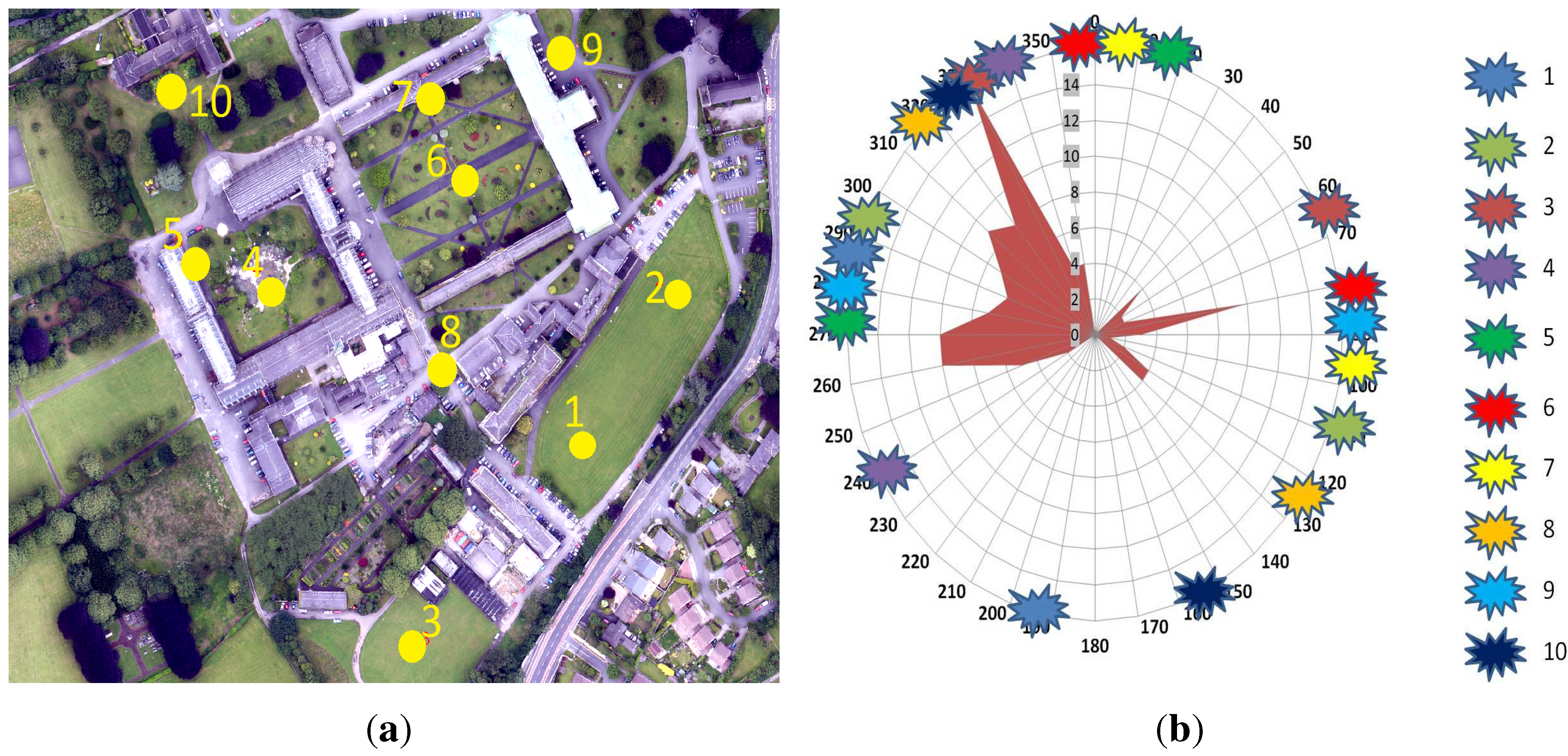
5.2. Choice of GNSS Sample Locations
5.3. Validation of the Methodology

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Term | Definition |
|---|---|
| Number of satellites predicted at the receiver location assuming no obstructions. | |
| Number of satellites predicted once obstructions have been included. | |
| Number of satellites observed once obstructions have been included. | |
| Discrepancy between and . |
| Point | Time | Location | Shadowing Objects | ||||
|---|---|---|---|---|---|---|---|
| 1 | 10:24 | 9 | 9 | 8 | 1 | Pitches | Buildings |
| 2 | 10:26 | 9 | 9 | 8 | 1 | Pitches | Buildings, Trees |
| 3 | 10:31 | 10 | 9 | 7 | 2 | Open Space | Trees |
| 4 | 10:39 | 10 | 8 | 8 | 0 | Courtyard | Buildings, Spire |
| 5 | 10:41 | 9 | 2 | 2 | 0 | Courtyard | Buildings, Spire |
| 6 | 10:45 | 9 | 9 | 9 | 0 | Square | Buildings, Spire |
| 7 | 10:47 | 9 | 4 | 4 | 0 | Square | Buildings |
| 8 | 10:55 | 10 | 2 | 2 | 0 | Junction | Buildings, Spire |
| 9 | 11:03 | 10 | 5 | 4 | 1 | Car Park | Buildings , Trees |
| 10 | 11:17 | 11 | 1 | 1 | 0 | Open Space | Building, Trees |
| Observations | Shadow Object 1 | Shadow Object 2 | |||||
|---|---|---|---|---|---|---|---|
| Point | Error | Azimuth | Height | Range | Azimuth | Height | Range |
| 1 | 1 | 195 | 13.8 m | 30.6 m | 283 | 12.7 m | 45 m |
| 2 | 1 | 287 | 9.6 m | 23.5 m | 110 | Veg | 33.9 m |
| 3 | 2 | 65 | 13.8 m | 75 m | 340 | Veg | 18.7 m |
| 4 | 0 | 345 | 76.5 m | 67.5 m | 295 | 5 m | 20 m |
| 5 | 0 | 17 | 76.5 | 39.3 m | 270 | 24 m | 2 m |
| 6 | 0 | 75 | 14.4 m | 49.3 m | 0 | 14.4 m | 40.5 m |
| 7 | 0 | 0 | 14.4 m | 2 m | 90 | 14.4 m | 54.8 m |
| 8 | 0 | 325 | 8 m | 40.4 m | 125 | 12.7 m | 39.3 |
| 9 | 1 | 270 | 14.4 m | 5.6 m | 90 | Veg | 22.6 m |
| 10 | 0 | 342 | 7.5 m | 4.6 m | 156 | Veg | 12.5 m |
5.4. Investigating Error Sources
5.4.1. Excluding Vegetation
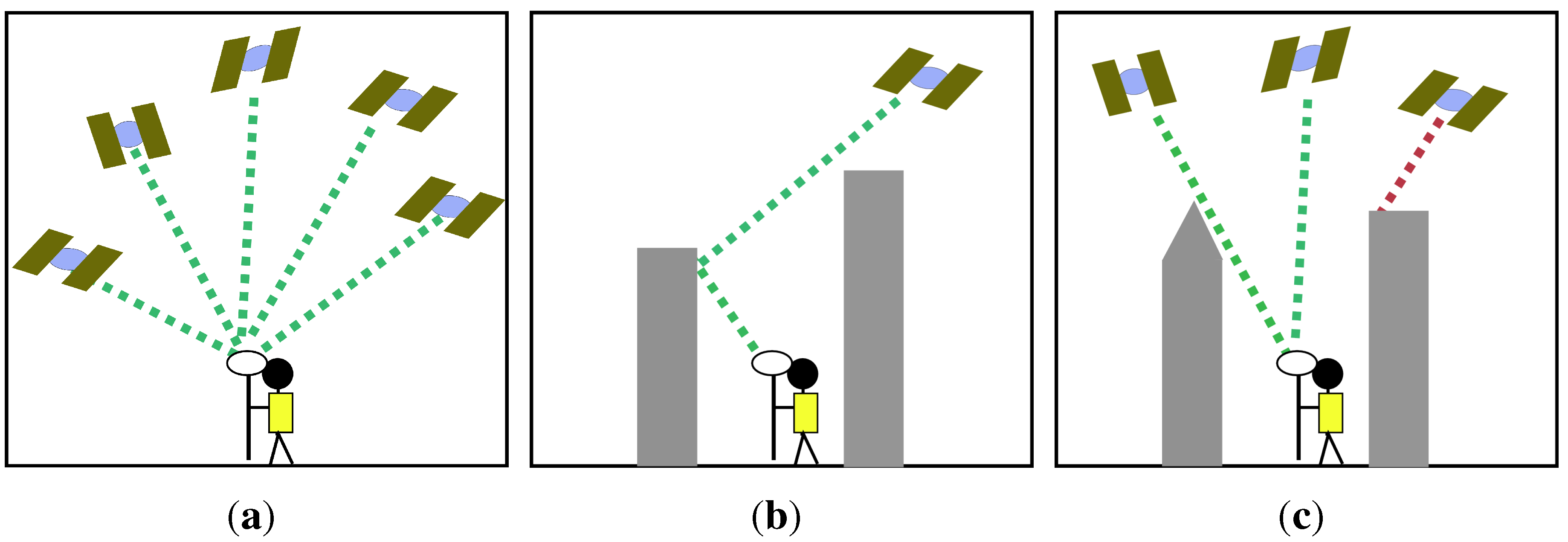
5.4.2. Multi-path
5.4.3. Model Generalisation
6. Conclusions
Acknowledgments
Conflicts of Interest
References
- Grewal, M.S.; Weill, L.R.; Andrews, P.A. Fundamentals of satellite and inertial navigation. In Global Positioning Systems, Inertial Navigation and Integration, 2nd ed.; Wiley: Interscience, NJ, USA, 2007; pp. 34–48. [Google Scholar]
- Trimble Planning Software Desktop Version. Available online: http://ww2.trimble.com/planningsoftware_ts.asp (accessed on 5 December 2014).
- Trimble Online Planning Tool. Available online: http://www.trimble.com/GNSSPlanningOnline/#/IonoInformation (accessed on 5 December 2014).
- Cahalane, C.; McElhinney, C.P.; Lewis, P.; McCarthy, T. MIMIC: Mobile mapping point density calculator. In Proceedings of the 3rd International Conference on Computing for Geospatial Research and Applications, Washington, DC, USA, 1–3 July 2012.
- El-Sheimy, N. An overview of mobile mapping systems. In Proceedings of the FIG Working Week 2005 and GSDI-8—From Pharaohs to Geoinformatics, Cairo, Egypt, 16–21 April 2005.
- Grejner-Brzezinska, D.A.; Toth, C.K.; Yi, Y. Bridging GPS gaps in urban canyons: Can ZUPT really help? In Proceedings of the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation, Salt Lake City, UT, USA, 11–14 September 2001.
- Barber, D.; Mills, J.; Smith-Voysey, S. Geometric validation of a ground-based mobile laser scanning system. ISPRS J. Photogramm. Remote Sens. 2008, 63, 128–141. [Google Scholar] [CrossRef]
- Hesse, R. LiDAR—Derived Local Relief Models—A new tool for archaelogical prospection. Arch. Proscenium 2010, 17, 67–72. [Google Scholar]
- Williams, K.; Olsen, M.J.; Roe, G.V.; Glennie, C. Synthesis of transportation applications of mobile LiDAR. Remote Sens. 2013, 5, 4652–4692. [Google Scholar] [CrossRef]
- McArdle, G.; Demšar, U.; van der Spek, S.; McLoone, S. Classifying pedestrian movement behaviour from GPS trajectories using visualization and clustering. Ann. GIS 2014, 20, 85–98. [Google Scholar] [CrossRef]
- Conway, C.J.; Keane, C.; McCarthy, S.; Ahern, C.; Behan, A. Leveraging Lean in construction: A case study of a BIM-based HVAC manufacturing process. J. Sustain. Des. Appl. Res. 2014, 2, 2–8. [Google Scholar]
- Hoegner, L.; Stilla, U. Thermal leakage detection on building facades using infrared textures generated by mobile mapping. In Proceedings of the 2009 Joint Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009.
- Matikainen, L.; Hyyppä, J.; Ahokas, E.; Markelin, L.; Kaartinen, H. Automatic detection of buildings and changes in buildings for updating of maps. Remote Sens. 2010, 2, 1217–1248. [Google Scholar] [CrossRef]
- Patel, D.P.; Srivastava, P.K. A flood hazards mitigation analysis using remote sensing and GIS: Correspondence with town planning scheme. Water. Res. Man 2013, 27, 2353–2368. [Google Scholar] [CrossRef]
- CityGML Implementation Specification. Candidate OpenGIS Implementation Specification. Available online: https://portal.opengeospatial.org/files/artifact_id=16675 (accessed on 5 December 2014).
- Kleijer, F.; Odijk, D.; Verbree, E. Prediction of GNSS availability and accuracy in urban environments—Case study schiphol airport. In Location Based Services and TeleCartography II, From Sensor Fusion to Context Models; Springer: Berlin, Germany, 2009; pp. 387–406. [Google Scholar]
- Kirchöfer, M.K.; Chandler, J.H.; Wachrow, R.; Bryan, P. Direct exterior orientation determination for a low-cost heritage recording system. Photogramm. Rec. 2012, 27, 443–461. [Google Scholar] [CrossRef]
- Verbree, E.; Tiberius, C.; Vosselman, G. Combined GPS—Galileo positioning for location based services in an urban environment. In Proceedings of the Location Based Services and Tele-Cartography Symposium, Vienna, Austria, 28–29 January 2004.
- McElhinney, C.P.; Kumar, P.; Cahalane, C.; McCarthy, T. Initial results from European Road Safety Inspection (EURSI) mobile mapping project. In Proceedings of the ISPRS Commission V Technical Symposium, Newcastle, UK, 22–24 June 2010.
- Lafarge, F.; Descombes, X.; Zerubia, J.; Pierrot-Deseilligny, M. Automatic building extraction from DEMs using an object approach and application to the 3D-city modeling. ISPRS J. Photogramm. Remote Sens. 2009, 63, 365–381. [Google Scholar] [CrossRef] [Green Version]
- Hinz, S.; Abelen, S. Theoretical analysis of building height estimation using space-borne SAR-interferometry for rapid mapping applications. Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2009, 38, 163–168. [Google Scholar]
- Hoffman, K.; Fischer, P. DOSAR : A multifrequency polarimetric and interferometric airborne SAR-system. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS ’02), Toronto, ON, Canada, 24–28 June 2002.
- Li, T.; Liu, G.; Lin, H.; Jia, H.; Zhang, R.; Yu, B.; Luo, Q. A hierarchical multi-temporal InSAR method for increasing the spatial density of deformation measurements. Remote Sens. 2014, 6, 3349–3368. [Google Scholar] [CrossRef]
- Vrhovski, D. Surface modelling for GPS satellite visibility. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, OR, USA, 9–12 September 2003.
- Cahalane, C.; McCarthy, T. UAS flight planning—An initial investigation into the influence of VTOL UAS mission parameters on orthomosaic and DSM accuracy. In Proceedings of the Remote Sensing and Photogrammety Society Annual Conference—“Earth Observation for Problem Solving”, Glasgow, Scotland, 4–6 September 2013.
- Pix4Dmapper Product Page. Available online: http://pix4d.com/products/ (accessed on 5 December 2014).
- Peyraud, S.; Bétaille, D.; Renault, S.; Ortiz, M.; Mougel, F.; Meizel, D.; Peyret, F. About non-line-of-sight satellite detection and exclusion in a 3D map-aided localization algorithm. Sensors 2013, 13, 829–847. [Google Scholar] [CrossRef] [PubMed]
- Kitamura, M.; Suzuki, T.; Amano, Y.; Hashizume, T. Improvement of GPS and GLONASS positioning accuracy by multipath mitigation using omnidirectional InfraRed camera. J. Robot. Mechatron. 2011, 23, 1125–1131. [Google Scholar]
- Marais, J.; Meurie, C.; Attia, D.; Ruichek, Y.; Flancquart, A. Toward accurate localization in guided transport: Combining GNSS data and imaging information. Transp. Res. Part C: Emerg. Technol. 2014, 43, 188–197. [Google Scholar] [CrossRef]
- Meguro, J.; Murata, T.; Takiguchi, J.; Amano, Y.; Hashizume, T. GPS accuracy tmprovement by satellite selection using omnidirectional infrared camera. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 22–26 September 2008.
- Groves, P.D. Shadow Matching: A new GNSS positioning technique for urban canyons. J. Navig. 2011, 64, 417–430. [Google Scholar] [CrossRef]
- Wang, L.; Groves, P.D.; Ziebart, M.K. GNSS shadow matching: Improving urban positioning accuracy using a 3D city model with optimized visibility prediction scoring. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 17–21 September 2012.
- Germroth, M.; Carstensen, L. GIS and satellite visibility: Viewsheds from space. In Proceedings of the 2005 ESRI International User Conference, San Diego, CA, USA, 25–29 July 2005.
- Coveney, S.; Fotheringham, S.; Charlton, M.; Butler, D. Fusion of Terrestrial LIDAR, 2d vector and image data in the generation of a 3D campus model. In Proceedings of the 4th International Workshop on 3D Geo-Information, Ghent, Belgium, 4–5 November 2009.
- Federici, B.; Giacomelli, D.; Sguerso, D.; Vitti, A.; Zatelli, P. A web processing service for GNSS realistic planning. Appl. Geom. 2013, 5, 45–57. [Google Scholar] [CrossRef]
- Taylor, G.; Li, J.; Kidner, D.; Ware, M. Surface modelling for GPS satellite visibility. In Proceedings of the W2GIS, LNCS, Lausanne, Switzerland, 15–16 December 2005.
- Lake, M.W.; Woodman, P.E.; Mithen, S.J. Tailoring GIS software for archaeological applications: An example concerning viewshed analysis. J. Arch. Sci. 1998, 25, 27–38. [Google Scholar] [CrossRef]
- Lee, J.; Stucky, D. On applying viewshed analysis for determining least-cost paths on Digital Elevation Models. Int. J. Geogr. Inf. Sci. 1998, 12, 891–905. [Google Scholar]
- Rich, P.M.; Dubayah, R.O.; Hetrick, W.A.; Savinc, S.C. Using Viewsheds to Calculate Intercepted Solar Radiation: Applications in Ecology; American Society for Photogrammetry and Remote Sensing: Bethesda, MA, USA, 1994. [Google Scholar]
- Suzuki, T.; Kubo, N. Simulation of GNSS satellite availability in urban environments using Google Earth. In Proceedings of the ION’s Pacific PNT 2015, Honolulu, HI, USA, 20–23 April 2015.
- Bentley Microstation V8 Datasheet. Available online: http://www.bentley.com/en-US/Products/MicroStation/ (accessed on 5 December 2014).
- Greenway, I.; Curran, S. Ordnance Survey Ireland—Life after New Mapping. In Proceedings of the IRLOGI 2005, Dublin, Ireland, 18 October 2005.
- Leica Cyclone Basic Datasheet. Available online: http://hds.leica-geosystems.com/downloads123/hds/hds/cyclone/brochures-datasheet/Leica_Cyclone_BASIC_DS_en.pdf (accessed on 5 December 2014).
- 3D Studio Product Specification. Available online: http://www.autodesk.com/products/3ds-max/overview (accessed on 5 December 2014).
- Trimble R8 GNSS System Datasheet Software. Available online: http://files-trl.trimble.com/docushare/dsweb/Get/Document-140079/022543-079M_TrimbleR8GNSS_DS_0413_LR.pdf (accessed on 5 December 2014).
- Prendergast, W.P.; Corrigan, P.; Scully, P.; Shackleton, C.; Sweeny, B. Coordinate reference systems. In Best Practice Guidelines for Precise Surveying in Ireland, 1st ed.; Irish Institution of Surveyors: Dublin, Ireland, 2004; pp. 17–20. [Google Scholar]
- Girres, J.F.; Touya, G. Quality assessment of the French OpenStreetMap dataset. Trans. GIS 2010, 4, 435–459. [Google Scholar] [CrossRef]
- Prendergast, W.P.; Flynn, M.; Corrigan, P.; Sweeny, B.; Martin, A.; Moran, P. OSi and boundary features. In Green Paper Proposing Reform of Boundary Surveys, 1st ed.; Irish Institution of Surveyors: Dublin, Ireland, 2008; pp. 1–8. [Google Scholar]
© 2015 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cahalane, C. Combining 2D Mapping and Low Density Elevation Data in a GIS for GNSS Shadow Prediction. ISPRS Int. J. Geo-Inf. 2015, 4, 2769-2791. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi4042769
Cahalane C. Combining 2D Mapping and Low Density Elevation Data in a GIS for GNSS Shadow Prediction. ISPRS International Journal of Geo-Information. 2015; 4(4):2769-2791. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi4042769
Chicago/Turabian StyleCahalane, Conor. 2015. "Combining 2D Mapping and Low Density Elevation Data in a GIS for GNSS Shadow Prediction" ISPRS International Journal of Geo-Information 4, no. 4: 2769-2791. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi4042769