1. Introduction
Time geography is powerful for analyzing human movements and activities through space and time [
1]. Rather than predicting activity-travel behavior directly, time geography mainly focuses on the feasibility for an individual to participate in activities under various Space-time constraints [
2]. At the core of time geography is the Space-time prism (STP) model, which depicts Space-time extents that can be physically reached by the individual from specified locations within a given time budget. This STP model has been widely used for various applications, such as measuring individual accessibility to urban services [
3,
4,
5,
6,
7], and formulating activity-based models of travel demand [
8,
9,
10,
11].
Time geography was first introduced by Torsten Hägerstrand in the 1970s [
1]. In the decades after its introduction, time geography faded somewhat into the background [
12], mainly due to the lack of geo-computational algorithms and individual-level movement data. With the advances in geographical information science (GIS) technologies in the 1990s, the last two decades have witnessed a resurgence of time geography in the literature. Substantial research efforts have been made to improving STP models to represent individuals’ accessible Space-time extents in complex urban areas. Recognizing that human movements in urban areas are usually constrained by road networks, Miller [
13] proposed a network-based STP (or called network-time prism, NTP) model. Other researchers further improved this NTP model by considering travel environment complexities, including turn restrictions [
14], dynamic and heterogeneous traffic conditions [
15,
16] and travel time uncertainties [
17,
18]. Chen et al. [
19] extend the NTP model into public transit networks. A geo-computational algorithm was developed to efficiently construct STPs in public transit networks using the A* and branch-and-bound techniques. Several useful tools also have been developed for visually analyzing NTPs in real road networks [
20,
21,
22].
In recent years, there has been a wider resurgence of time-geographic studies due to the emerging spatiotemporal big data, collected by a variety of geospatial technologies, including human and vehicle trajectories collected by GPS (Global Positioning System) devices, mobile phone records, smart card data, social media check-ins, etc. These spatiotemporal big data provide an unprecedented opportunity for time-geographic studies to uncover people’s mobility patterns and their interactions with the urban environment [
23,
24,
25,
26,
27,
28,
29,
30]. To support such time-geographic studies in the era of spatiotemporal big data, efficient geo-computational algorithms for constructing NTPs in large-scale road networks are sorely needed.
In most previous time-geographic studies, NTPs are constructed by a straightforward algorithm [
31], which utilizes two one-to-all shortest path searches, based on the Dijkstra’s algorithm. This straightforward algorithm is hereafter referred to as the NTP-Dij algorithm for convenience. In the NTP-Dij algorithm, a forward shortest path search is firstly carried out from the origin to determine the earliest arrival time at every node. Then, a backward shortest path search is performed from the destination to obtain the latest departure time at every node. Finally, the accessible nodes (and links) can be determined by checking whether their earliest arrival time is larger than the latest departure time. Such a NTP-Dij algorithm is easy to implement by directly using the classical shortest path algorithm (i.e., Dijkstra’s algorithm). However, it requires exploration of the whole network twice, and leads to considerable computational overheads, given the fact that accessible nodes in the NTP are generally only a small portion of the entire network. To reduce the number of explored nodes, Kuijpers and Othman [
28,
29] proposed an algorithm (called NTP-SN in this study) to construct the NTP in a sub-network instead of the whole network. The sub-network is generated by selecting nodes and links within the STP in the planar space. Nevertheless, the computational advantage of this NTP-SN algorithm is marginal, because the STP in the planar space is generally quite large compared with the actual NTP [
28,
29]. Further, although several NTP construction algorithms have been developed, there is a lack of numerical experiments in the literature to systematically investigate the computational performance of existing NTP construction algorithms in real road networks.
To fill this gap, this study investigates models and geo-computational algorithms for efficiently constructing NTPs in real road networks. This study contributes to time-geography literature in the following aspects:
Firstly, an improved NTP model is proposed by considering the complexities of road networks, including turn restrictions and divided/undivided roads. The proposed NTP model differentiates divided and undivided roads, and allows for individuals to make U-turns and access partial links on undivided roads. The proposed model, thus, enhances the realistic representation of NTPs in road networks.
Secondly, an efficient geo-computational algorithm, called NTP-A*, is developed to construct NTPs in large-scale road networks. In the proposed NTP-A* algorithm, turn restrictions and partially accessible links on undivided roads are explicitly considered. The A* and branch-and-bound techniques are employed to improve the NTP construction performance by discarding inaccessible links during shortest path searches. The label-correcting and hybrid link-node labeling techniques are also introduced in order to improve the NTP construction performance. The proposed NTP-A* algorithm, therefore, significantly improves the NTP construction performance in large-scale road networks.
Thirdly, a comprehensive case study using several real road networks is carried out to examine the computational performance of the proposed NTP-A* algorithm. Two existing NTP construction algorithms, NTP-Dij and NTP-SN, are also implemented for comparison purposes. Several implantation techniques (including the A* technique, branch-and-bound technique, label-correcting technique and hybrid link-node labeling technique) in the NTP construction are examined and discussed. The results of the case study indicate that the proposed NTP-A* algorithm can significantly improve the existing NTP-Dij and NTP-SN algorithms by a factor of 100 in large-scale road networks.
The remainder of this paper is structured as follows. In the next section, the classical STP model in the planar space is briefly introduced to provide a necessary background. The improved NTP model is introduced in
Section 3. The proposed NTP-A* algorithm is presented in
Section 4. Computational experiments using real-world road networks are reported in
Section 5. Finally, the conclusions and future research recommendations are given in
Section 6.
2. The Classical Space-Time Prism Model in the Planar Space
This section briefly introduces the classical Space-time prism (STP) model in the planar space.
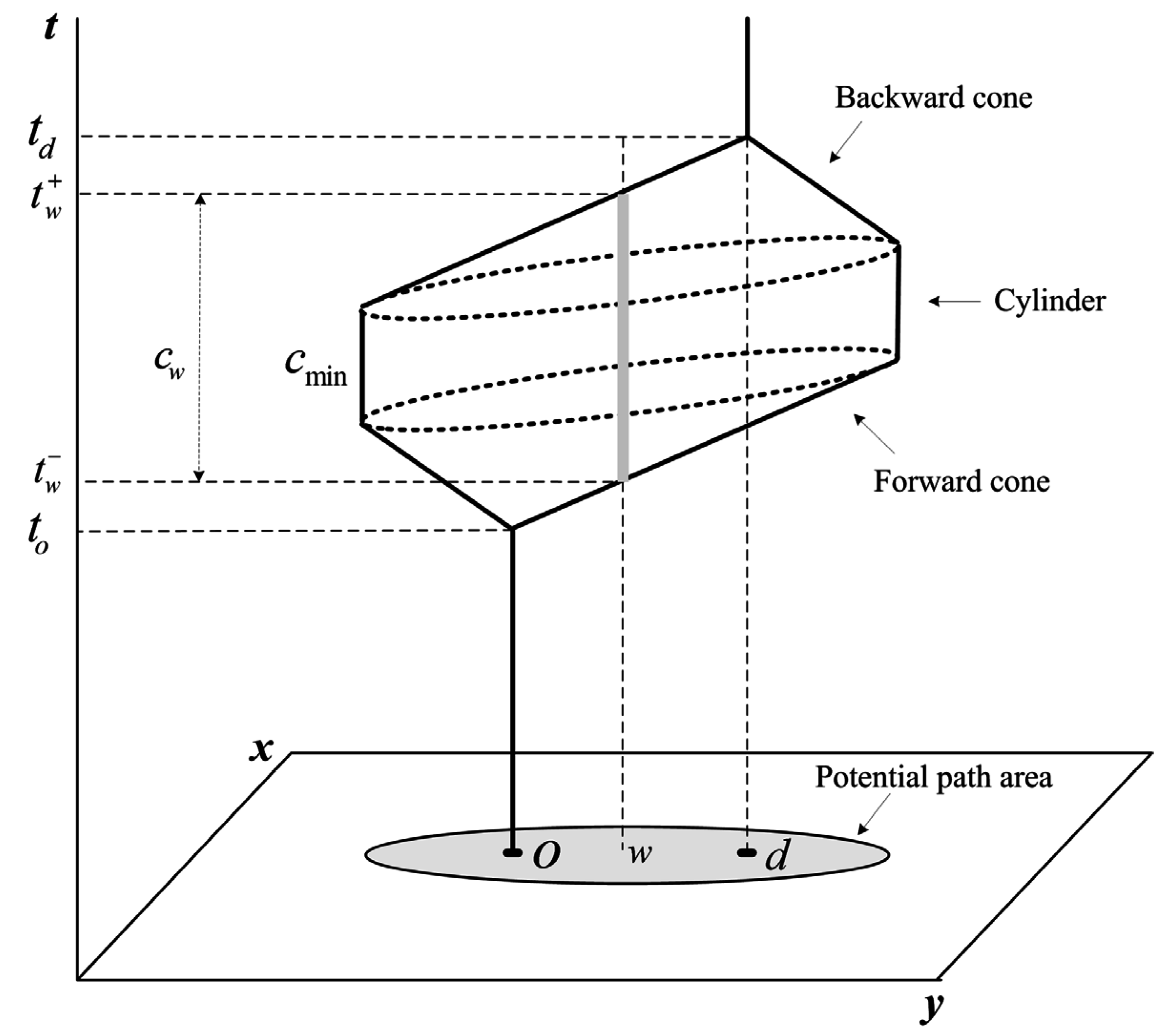
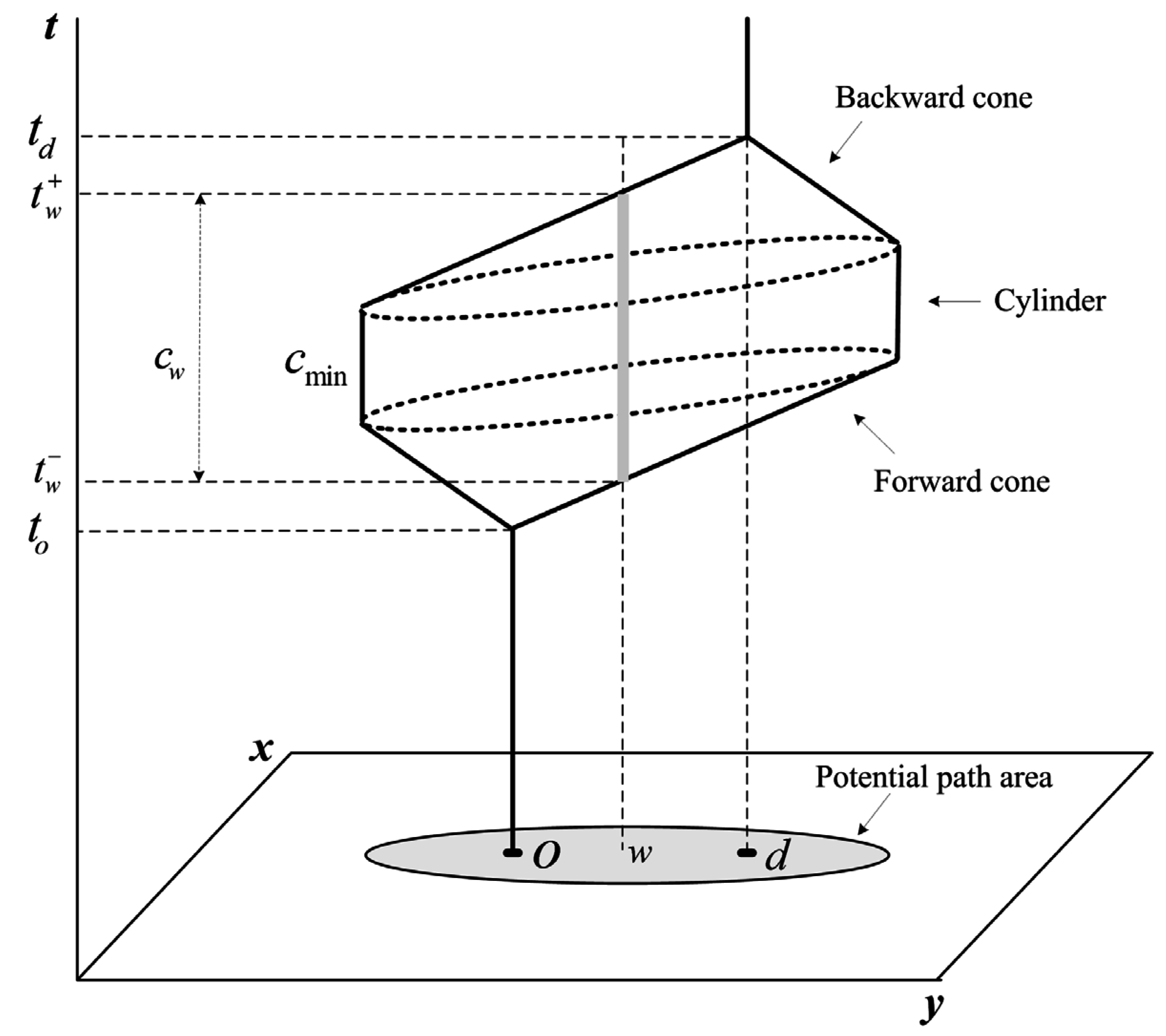
Figure 1 illustrates this prism model in a three-dimensional (3D) space, where the x and y axes represent two-dimensional (2D) geographic space and the t axis represents time. Suppose an individual planning to conduct two fixed activities at origin
and time instance
, and destination
and time instance
, respectively. The STP delimits Space-time extents for the individual to schedule another flexible activity between these two fixed activities. Analytically, the STP can be constructed by the intersection of a forward cone, a backward cone, and a cylinder. The forward cone,
, consists of all locations that can be reached from the origin at time
; the backward cone,
, comprises all locations that can arrive at the destination given the remaining time
; and the cylinder,
, delimits all geographic locations within the potential path area (PPA). According to Reference [
2], the STP in the planar space can be formally expressed as
where
is the minimum duration for flexible activity participations,
is the Euclidean travel time from the origin to a location
, and
is the Euclidean travel time from the location
to the destination. In the planar space, the Euclidean travel times (i.e.,
and
) can be calculated simply as Euclidean distances (denoted by
and
) between these two locations divided by the maximum travel speed
.
Projecting the STP onto the 2D geographical space forms a PPA that includes all accessible locations for flexible activity participations in the 2D geographic space as:
where
is the maximum time budget for traveling. The height of the Space-time prism at location
represents the maximum activity duration,
, at the location as:
where
is the earliest arrival time at the location, and
is the latest departure time from the location.
The above classical STP model in the planar space can be easily constructed and have rigorous formalization. However, this model builds on an unrealistic assumption that movements occur at a constant speed everywhere in the planar space [
2,
12,
13,
15]. In reality, people in urban areas do not move freely in the planar space, but, rather, within spatially embedded road networks. The classical STP model, thus, oversimplifies real travel environment complexities, and is inadequate for an individual’s activity-travel scheduling.
3. Constructing Space-Time Prisms in Road Networks
This section formulates a network-time prism (NTP) model, considering the complexities of road networks, including turn restrictions and divided/undivided roads. A road network can be represented as a directed graph
, comprising a set of nodes
, a set of links
, and a set of allowed turns
. Each directed link
has a tail node
, a head node
, and a link travel time
. A turn
, passing through links
and
, represents an allowed movement at node
(e.g., right turn or U-turn). Further,
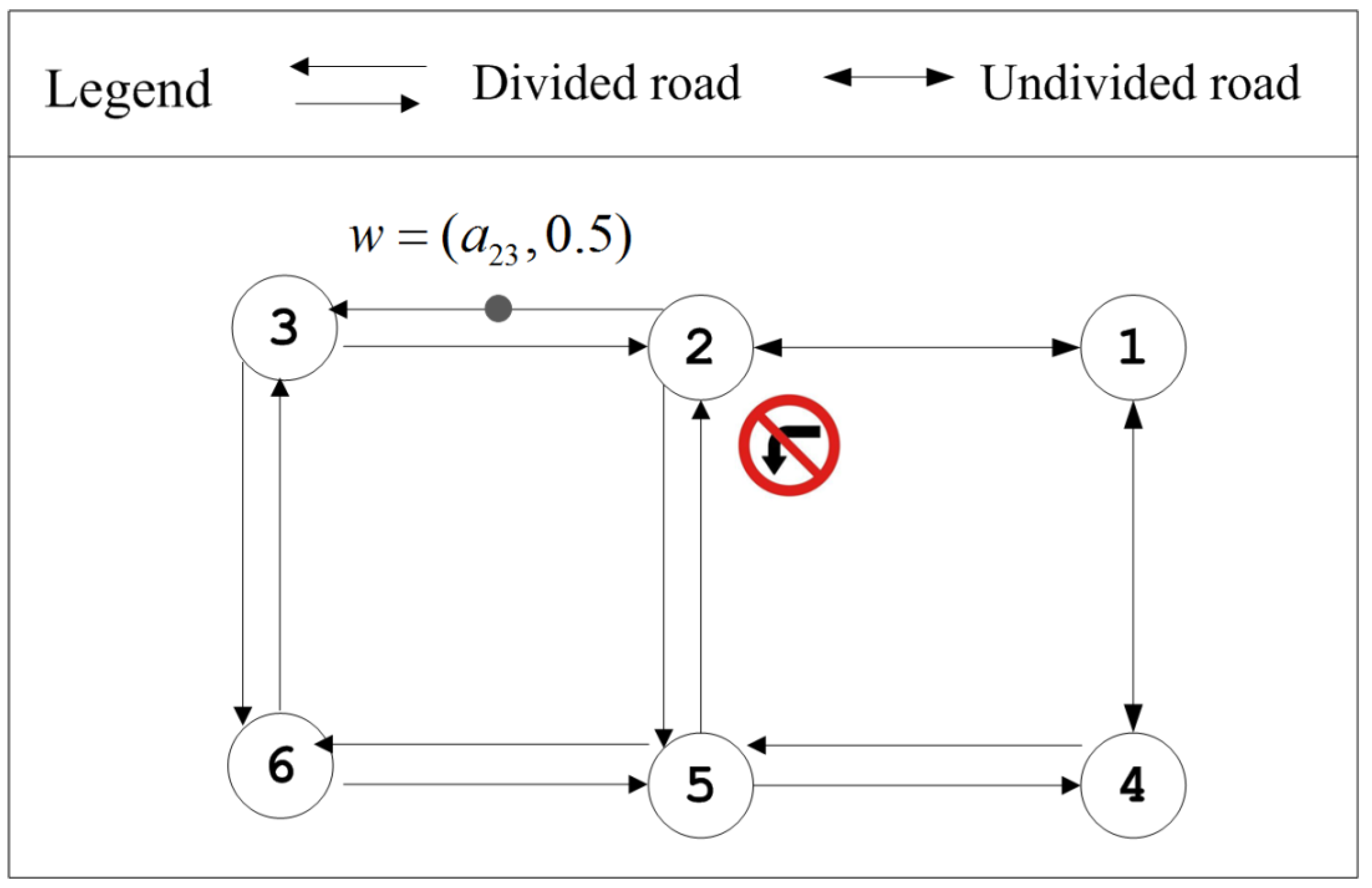
means that the movement from link
to link
is restricted at node
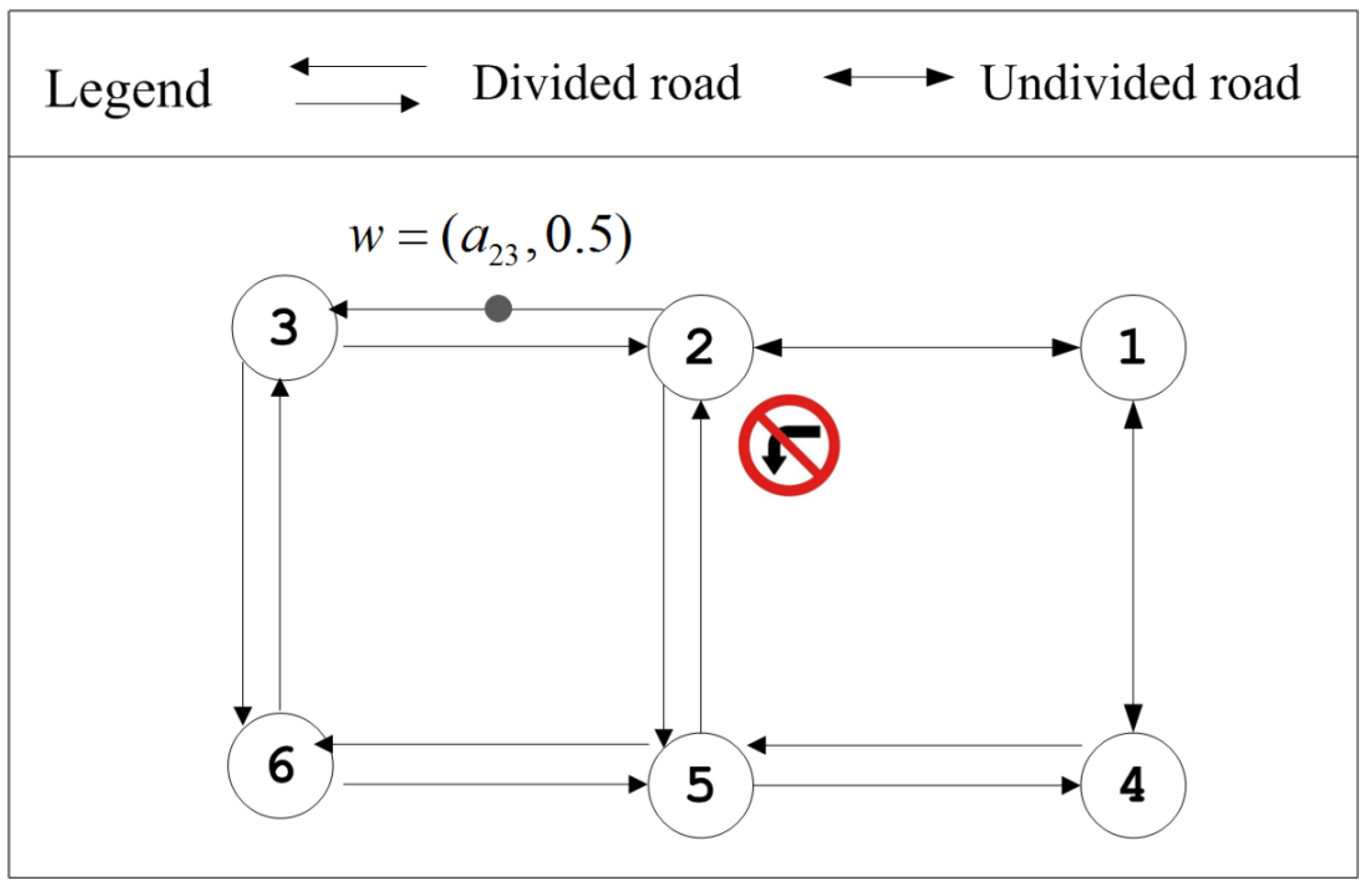
(e.g., left turn
in
Figure 2). In addition to making turns at nodes, U-turns are allowed at any location on an undivided link (e.g., a minor road), but restricted on a divided link (e.g., an arterial road). For example,
and
in
Figure 2 are two opposite links of an undivided road, and travelers can freely make U-turns between these two links. It should be noted that a two-way road, regardless of whether it is divided or undivided, is represented by two opposite directed links, while a one-way road is represented by only one directed link.
Any location
in the network can be represented as
using the linear reference technique [
23,
32], where
is the relative position on the link
. For example, location
in
Figure 2 indicates the middle of link
. The travel times of partial links
and
are assumed to be proportional to their distance as:
Let
be the least time path between two locations,
and
. The path travel time,
, can be calculated by summing the corresponding link travel times along the path:
where
is the link-path incidence relationship,
means that (partial) link
is on path
, and otherwise
. In the road network with turn restrictions, the least time path can be determined by shortest path algorithm using a link-based labeling technique [
33]. It should be noted that the classical node-based Dijkstra’s algorithm [
34] ignores turn restrictions and may lead to infeasible paths.
Let
be the least travel time from the origin to location
, and let
be the least travel time from location
to the destination. By replacing
and
with
and
in Equations (1)–(4), the NTP in the road network can be expressed as
This NTP delimits an individual’s accessible Space-time locations in the road network between origin
and destination
during the time period of
to
. The height of the NTP at location
represents the maximum activity duration
at the location as:
where
and
, respectively, are the earliest arrival time and the latest departure time from the location.
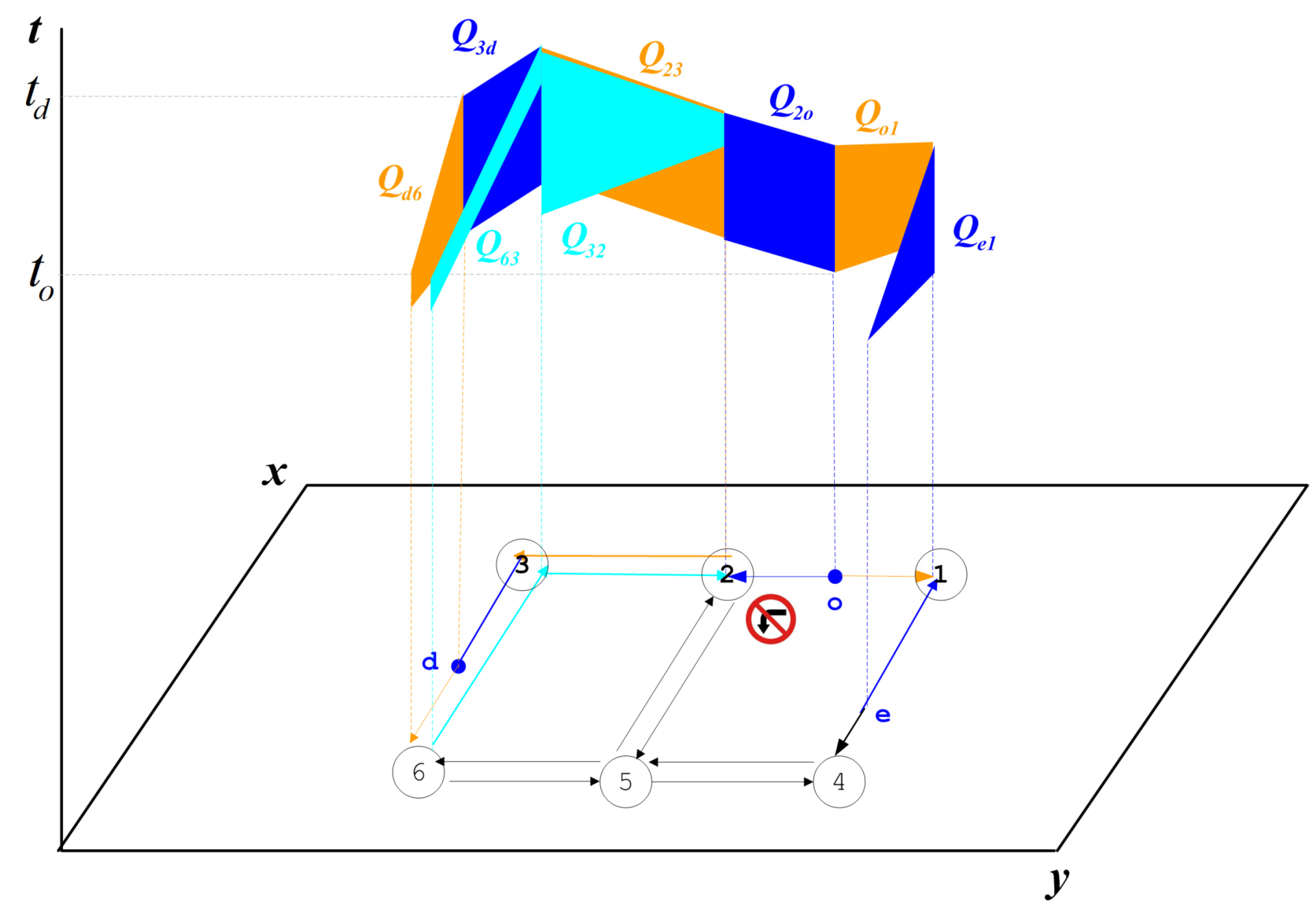
Figure 3 illustrates a simple NTP in a road network. As can be seen in the figure, the NTP comprises a set of 2D Space-time polygons
on network links. Each Space-time polygon
represents all accessible Space-time locations along network link
[
23]. The projection of the NTP onto the 2D geographic space is the potential network area (PNA), comprising a set of accessible (partial) links
. Let
be the least time path from origin
to node
passing through link
, and let
be the least time path from node
to destination
passing through link
. Their path travel times are
and
, respectively. Accessible link
should satisfy following travel time budget constraint:
It can be observed from
Figure 3 that divided and undivided links could have significant differences in their 2D polygons. Firstly, identical Space-time polygons can be generated on two opposite links of an undivided road, but not a divided road. For example, origin
in the figure is located on undivided link
. Since travelers can make U-turns freely on the undivided road, identical Space-time polygons (i.e.,
and
) are generated on opposite links
to
. The situation is, however, different for destination
, located on divided link
. As travelers cannot make U-turns at divided links, different shapes of Space-time polygons (i.e.,
and
) are generated on opposite links
to
. Secondly, partial links within the NTP can be observed only on undivided roads and not on divided roads. For example, it can be seen from the figure that Node 1 is within the PNA, but Node 4 is not. As link
is undivided, travelers can access part of the locations on the link and turn back to Node 1; and, thus, partial links
and
are accessible with Space-time polygons
and
. It can also be seen from the figure that partial links are not accessible for divided links
and
. Although Node 6 is accessible within the PNA, travelers cannot reach other locations at the link and return to Node 6 by making U-turns on the divided link. Therefore, divided and undivided links can have significantly different Space-time polygons and should be explicitly considered in the NTP model.
4. Geo-Computational Algorithms for Constructing Network-Time Prisms
Similar to the existing NTP-Dij algorithm [
6,
31], a straightforward algorithm for constructing a NTP is to apply two shortest path searches using the link-based one-all Dijkstra’s algorithm [
33]. The forward search is used to calculate the least travel time
from origin
to every link
(i.e., head node
). The backward search is to calculate the least travel time
from every link
(i.e., tail node
) to destination
. Then, accessible links
satisfying
can be identified. This straightforward algorithm is easy to implement by directly using the existing link-based Dijkstra’s algorithm. However, it can lead to considerable computational overheads by exploring all network links twice, given the fact that accessible links in the NTP are generally a small portion of the entire network.
In this study, an efficient algorithm (called the NTP-A* algorithm) is proposed by using A* and branch-and-bound techniques. The A* technique, utilizing a heuristic evaluation function, is proved to be effective in improving shortest path search performance. The branch-and-bound technique tries to discard inaccessible links (i.e., ) during forward and backward shortest path searches, rather than after the shortest path searches. Using these two techniques, the proposed NTP-A* algorithm can significantly reduce the number of explored links by the two shortest path searches and can thereby improve the NTP construction performance. The detailed steps of the NTP-A* algorithm are described below.
Step 1. Road network modification. In classical shortest path algorithms, the origin and destination should be located at network nodes. This step is to address the situation of the origin at link (destination at link ) by adding temporary node () and links and ( and ) into network . If link () is an undivided link, additional temporary links and ( and ) are also added in the opposite direction.
Step 2. Forward shortest path search. This step is to determine the least travel time
from the origin to each network link
by using the following R-FSP procedure (Road–Forward Search Procedure). Using the A* technique, a heuristic evaluation function
is used as heuristic cost for the forward shortest path
from the origin to link
, where
is the estimated lower bound of
. Since the Euclidean travel time
from node
to the destination always satisfies
, this study adopts
as the admissible
value. The
in the planar space can be calculated by
, where
is the maximum travel speed in the road network. Using the A* technique, the information of each link to the destination can be fully utilized to guide the forward shortest path search. The branch-and-bound technique is further incorporated in the forward search to discard all paths
satisfying
. Because
always holds, all paths satisfying
can be identified as inaccessible links outside the NTP, and thus can be eliminated during the forward search. In this way, the forward search explores only a part of links
; other links
outside the NTP are not explored.
| R-FSP Procedure |
| Inputs: origin and destination , travel time budget |
| Outputs: the least travel times at accessible links |
| Step 1. Initialization: |
| 01: For each link |
| 02: Set forward path , its travel time and heuristic cost . |
| 03: End For |
| 04: For each link emanating from origin |
| 05: Create a forward path , and set and . |
| 06: Insert into the scan eligible . |
| 07: End For |
| Step 2. Path selection: |
| 08: If , then stop; otherwise, continue. |
| 09: Select at the top of , and remove it from . |
| Step 3. Path extension: |
| 10: For each allowed movement from selected link to link |
| 11: Create a forward path , and set and . |
| 12: If then |
| 13: If is less than the existing path travel cost then |
| 14: If existing path , then set . |
| 15: Set and . |
| 16: End If |
| 17: End If |
| 18: End For |
| 19: Go back to Step 2. |
Step 3. Backward shortest path search. This step is to determine the least travel time
from each network link
to the destination by using the following R-BSP procedure (Road-Backward Search Procedure). Using the A* technique, the heuristic evaluation function
is used as the path heuristic cost for the backward shortest path from the destination to link
, where
is an estimated lower bound of
. In this study, the least travel time
calculated in the forward search is utilized as the
value in this backward search. Unexplored links (with
) in the forward search are outside the NTP and thus can be safely discarded in the backward search. Using this method, the results of the forward search are fully utilized to speed up the backward search. The branch-and-bound technique is incorporated to discard all links outside the NTP (i.e., all paths satisfying
) during the backward shortest path search process. After the back search, explored links with
can be determined as accessible full links within the NTP.
| R-BSP Procedure |
| Inputs: origin and destination , travel time budget |
| Outputs: all accessible links in the network-time prism |
| Step 1. Initialization: |
| 01: For each link |
| 02: Set backward path , its travel time and heuristic cost . |
| 03: End For |
| 04: For each link merging to destination |
| 05: If forward path at link then |
| 06: Create a backward path , and set and . |
| 07: Insert into the scan eligible . |
| 08: End If |
| 09: End For |
| Step 2. Path selection: |
| 10: If , then stop; otherwise, continue. |
| 11: Select at the top of , and remove it from . |
| Step 3. Path extension: |
| 12: For each allowed movement from link to selected link |
| 13: If forward path at link then |
| 14: Create a backward path , and set and . |
| 15: If then |
| 16: If is less than the existing path travel cost then |
| 17: If existing label , then set . |
| 18: Set and . |
| 19: End If |
| 20: End If |
| 21: End If |
| 22: End For |
| 23: Go back to Step 2. |
Step 4. Potential network area construction. This step is to determine accessible full and partial links in the NTP. Using the results of Step 3, all accessible full links can be easily determined as the explored links (with ). Among them, divided and undivided full links are maintained, respectively, in two link sets, and . For each accessible undivided full link , its opposite link is also included in . All accessible partial links are identified and stored in another set, . Any accessible partial link can be identified if the link is undivided, satisfies , and connects to an accessible link , .
Step 5. Network–time prism construction. This step is to construct Space-time polygon
for each accessible (partial) link
. Different shapes of space-time polygons are constructed for links in
,
and
as follows:
- ➢
The divided link scenario (i.e., ). The earliest arrival time and latest departure time at tail node can be calculated as and . The earliest arrival time and latest departure time at head node are determined as and . The Space-time polygon can be constructed as . If the link has one or many intermediate vertices, then are also calculated and included in for each intermediate vertex . The and values at each vertex can be interpolated from those of the tail and head nodes.
- ➢
The undivided link scenario (i.e., ). Firstly, two Space-time polygons and are constructed for two opposite links and , using the same method of the above-mentioned divided link scenario. Then, constructed polygons and are merged into a new polygon . Finally, the merged polygon is set as the polygons for both links and .
- ➢
The partial link scenario (i.e., ). Let be a set of accessible predecessor links of the link . The earliest arrival time and latest departure time at node are determined as and among all accessible predecessor links, . To determine accessible partial link , its end node is calculated by . Its earliest arrival time and latest departure time are calculated as and . A Space-time polygon is constructed for partial link through as . If partial link has one or many intermediate vertices, then the corresponding are also calculated and included in for every intermediate vertex . Then, using a similar method, polygon for partial link in the opposite direction is constructed. These two constructed polygons, and , are merged into a new polygon . Finally, the merged polygon is set as polygons for both directions.
Step 6. Road network restoration. This step is to restore road network by removing the temporary nodes and links added in Step 1.
The computational complexity of the proposed NTP-A* algorithm is analyzed. With the implementation of a priority queue using the F-heap structure [
35], both forward and backward shortest path searches (Steps 2 and 3) require
in the worst case, where
is the number of turns in the road network and
is the number of links in the road network. In Steps 4 and 5, both PNA construction and NTP construction run in
. In summary, the total computational time is
. Therefore, the performance of the NTP-A* algorithm is dominated by the two shortest path searches in Steps 2 and 3.
The improvement of the two shortest path searches (i.e., R-FSP and R-BSP algorithms) could significantly enhance the NTP construction performance. In addition to A* and branch-and-bound techniques, several implementation issues can affect the shortest path searching performance. Conventionally, the A*-based shortest path searches utilize the label-setting technique by using priority queue data structures (e.g., F-heap) for SE (scan eligible) implementation. The label-correcting technique, by using the linked-list data structure, is suggested for the proposed NTP-A* algorithm due to its computational efficiency. In the above-mentioned R-FSP and R-BSP algorithms, the link-based labeling technique [
33] is adopted to consider turn restrictions in the road network. Recently, Li et al. [
36] proposed a new hybrid link-node labeling technique by adaptively using a node-based labeling technique at nodes without turn restrictions and a link-based labeling technique at nodes with turn restrictions. It was reported [
36] that the hybrid link-node labeling technique can determine the least time path in a road network with turn restrictions, while achieving a similar computational performance as the classical node-based Dijkstra’s algorithm. It is noted that, theoretically, these techniques (i.e., A* and branch-and-bound techniques, and label-correcting and hybrid link-node labeling techniques) do not affect the worst-case complexity of the NTP-A* algorithm (which is the same as that of the existing NTP-Dij and NTP-SN algorithms). In practice, these techniques can significantly enhance the NTP construction performance in real-world road networks. The effectiveness of such techniques will be examined and discussed in the next section though a comprehensive case study.
5. Case Study
In this study, a comprehensive case study using real-world road networks is carried out to investigate the computational performance of the proposed NTP-A* algorithm. The proposed NTP-A* algorithm was implemented using the Visual C# programming language. A link-based adjacency list structure [
33] was employed to load the road network into the memory. The link-based label-correcting technique was adopted for implementing the R-FSP and R-BSP procedures. For comparison, three other NTP construction algorithms were also implemented using the same programming language. The first algorithm, called NTP-BB, only employs the branch-and-bound technique, but sets the heuristic evaluation function to be zero for both R-FSP and R-BSP algorithms. The second algorithm, called NTP-Dij, employs neither the A* technique nor the branch-and-bound technique. This algorithm was modified from the existing straightforward algorithm [
31] by using the link-based Dijkstra’s algorithm to consider the turn restrictions in road networks. The third algorithm (called NTP-SN) was implemented based on the existing algorithm of constructing the NTP within a sub-network [
28,
29]. In this NTP-SN algorithm, the sub-network was constructed by selecting nodes and links within the STP in the planar space; and then the NTP-Dij algorithm was directly utilized to construct the NTPs. In the implementation, the sub-network was generated by simply setting an “enable” attribute as true for corresponding nodes and links within the sub-network. The maximum travel speed (i.e.,
) was set as 120 km/h. In this case study, all experiments were conducted on a MacBook Air laptop with a four-core Intel i7 CPU running at 2.0 GHz and the Windows 7 operating system.
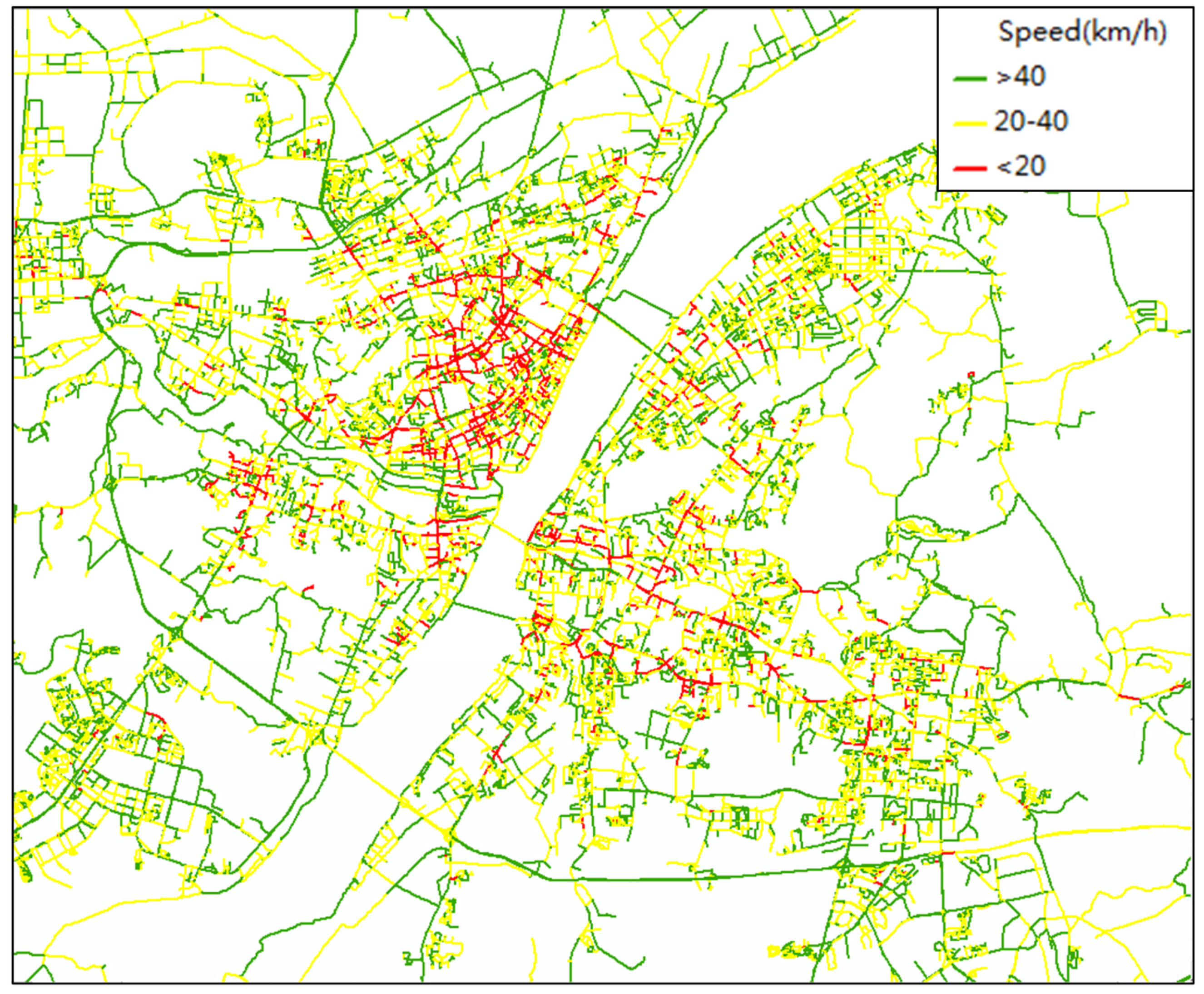
The road network in Wuhan, China, with detailed information of turn restrictions and divided/undivided roads, was adopted for this case study. As shown in
Figure 4, the Wuhan road network consists of 19,306 nodes, 46,757 links and 128,965 turns. In this road network, 24,909 links are divided (i.e., 53.3% of total links) and other 21,848 links (i.e., 46.7% of total links) are undivided. The number of restricted turns is 1681, accounting for only 1.30% of total turns. To obtain link travel times of the Wuhan road network, real-world floating car data (FCD) were collected on a typical Thursday (3 September 2009).
Figure 4 shows the estimated travel times during an evening peak period (6 p.m.–7 p.m.). For the detailed method of estimating these travel times, interested readers may refer to Reference [
5].
Table 1 reports the computational performance of all four algorithms (i.e., NTP-A*, NTP-BB, NTP-Dij and NTP-SN) in the Wuhan road network. The travel time budget (i.e.,
) values were set from 10 to 150 min. The size of a NTP was measured by the percentage of links within the NTP over the whole network. The computational performance of all algorithms was measured by computational times (
) and the number of selected links (
). The reported computational performance was the average of 100 runs using different origin and destination (O-D) pairs. The 100 O-D pairs were randomly generated in the network and the same set of O-D pairs was used for all algorithms.
As can be seen from the table, the computational performance of the NTP-A* algorithm degraded with the increase of the travel time budget (i.e., ) values. For example, when min, the NTP-A* algorithm requires only 5.75 ms. When min, this computational time significantly increases to 593.18 ms. This result is obvious, due to the increase in NTP size from 1.02% to 96.71% when the values increase from 10 to 150 min. It can be observed from the table that the travel time budget parameter has no impact on the computational performance of the NTP-Dij algorithm, which consumed 629.23 ms for all values. This is because the NTP-Dij algorithm utilizes two one-to-all shortest path searches to determine the earliest departure time and latest arrival time for every network link, regardless of different values. The NTP-Dij algorithm, therefore, can have a significant computational overhead by exploring a large number of unnecessary network links, when the NTP size is small. For example, when min, the computational time consumed by the NTP-Dij algorithm was about 108 times (i.e., 629.23/5.75 − 1) more than that of the proposed NTP-A* algorithm.
Compared with the NTP-Dij algorithm, the NTP-SN algorithm constructs the NTP in a sub-network within the STP in the planar space, instead of the whole network. It can be seen from the table that this NTP-SN algorithm can improve the NTP construction performance when the travel time budget is very small (e.g., min). However, this computational improvement degrades quickly with the increase of the travel time budget (e.g., min). This is because the sub-network defined by the STP in the planar space was generally quite a bit larger than the actual NTP. When the travel time budget becomes large (e.g., min), the sub-network may reach the whole network. In this case, the sub-network generation can introduce an additional computational burden.
The proposed NTP-A* algorithm utilizes both A* and branch-and-bound techniques to improve the NTP construction performance. The effectiveness of the branch-and-bound technique was investigated through a comparison between the NTP-Dij and NTP-BB algorithms. Using the branch-and-bound technique, the NTP-BB algorithm can discard inaccessible network links of which travel times to the destination (i.e., ) (or from the origin, i.e., ) are larger than the given travel time budget . Compared with the NTP-Dij algorithm, this introduced branch-and-bound technique can significantly reduce the number of explored unnecessary links and thereby improve the NTP construction performance. For example, when min, the branch-and-bound technique reduced the number of selected links by 98.96% (i.e., 1 − 7694/743853). The NTP-BB algorithm, therefore, runs about 83 times faster than the NTP-Dij algorithm when min. Nevertheless, it can be found from the table that the effectiveness of the branch-and-bound technique degrades with the increase of travel time budget values, and becomes marginal when the size of the NTP approaches the whole network (i.e., 100%).
The effectiveness of the A* technique was examined by a comparison between the NTP-BB and NTP-A* algorithms. In the proposed NTP-A* algorithm, both the A* and branch-and-bound techniques were employed to discard the unnecessary links of which heuristic costs to the destination (i.e., ) (or from the origin, i.e., ) are larger than the given travel time budget . In the forward search, a heuristic function was introduced by incorporating the information of each link to the destination, while, in the backward search, the heuristic function was adopted by best using the forward search results. Compared with the NTP-BB algorithm, the introduced A* technique was effective in reducing the number of selected links by 60.75% and improved the NTP construction performance by 30.78% when min. The effectiveness of this A* technique became more distinct when a medium-size NTP was used. For example, when min, the A* technique can reduce the number of selected links by 62.63% and improve the NTP construction performance by 103.90%. Similar to the branch-and-bound technique, the effectiveness of the A* technique becomes marginal when the size of the NTP approaches that of the whole network.
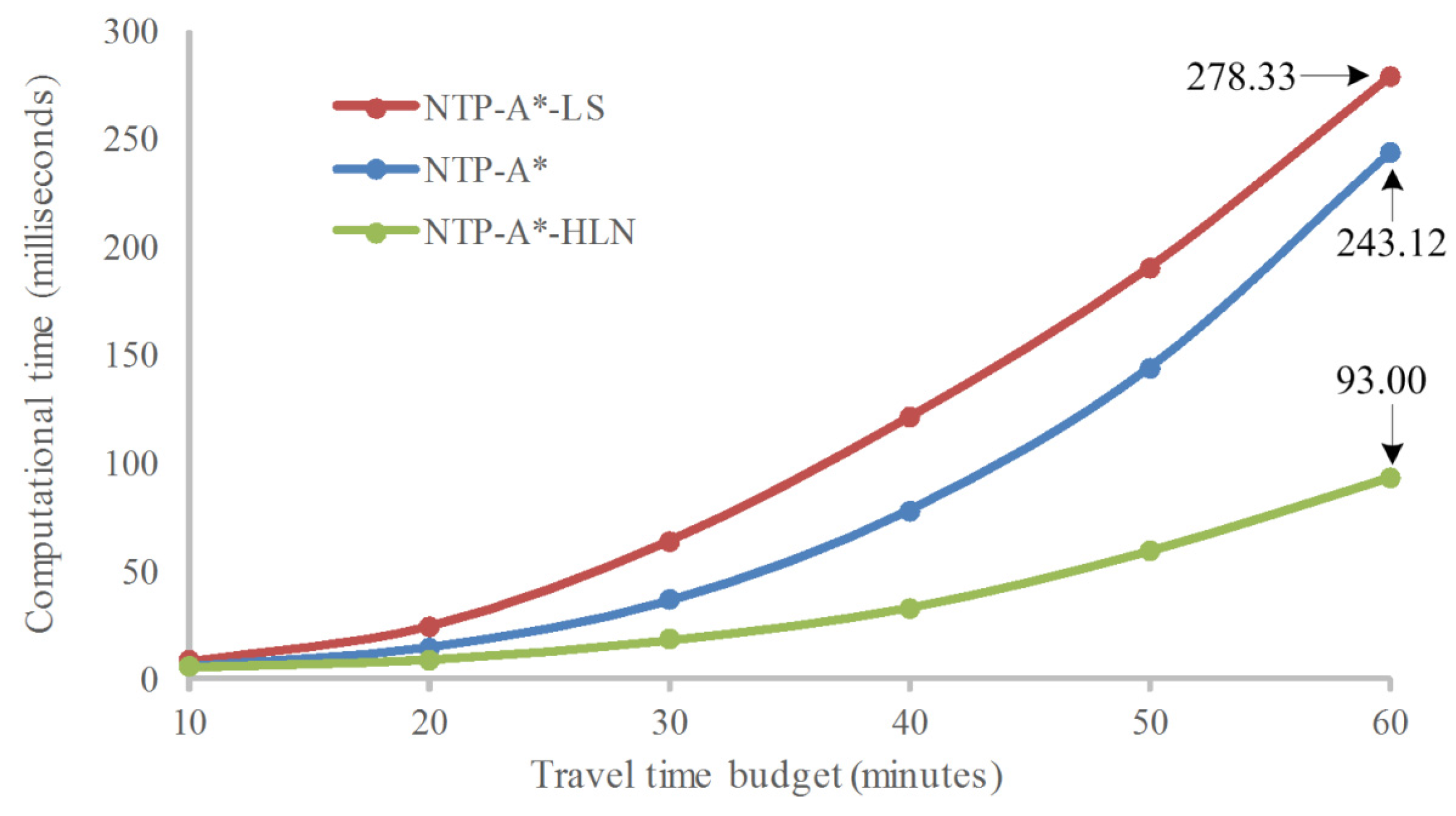
Several implementation techniques of the proposed NTP-A* algorithm were also examined. Examined first was the effectiveness of the label-correcting technique in SE implementation. Conventionally, the A*-type shortest path algorithm utilizes the label-setting technique [
37,
38]. For comparison, this label-setting technique was also implemented in the case study using an F-heap data structure [
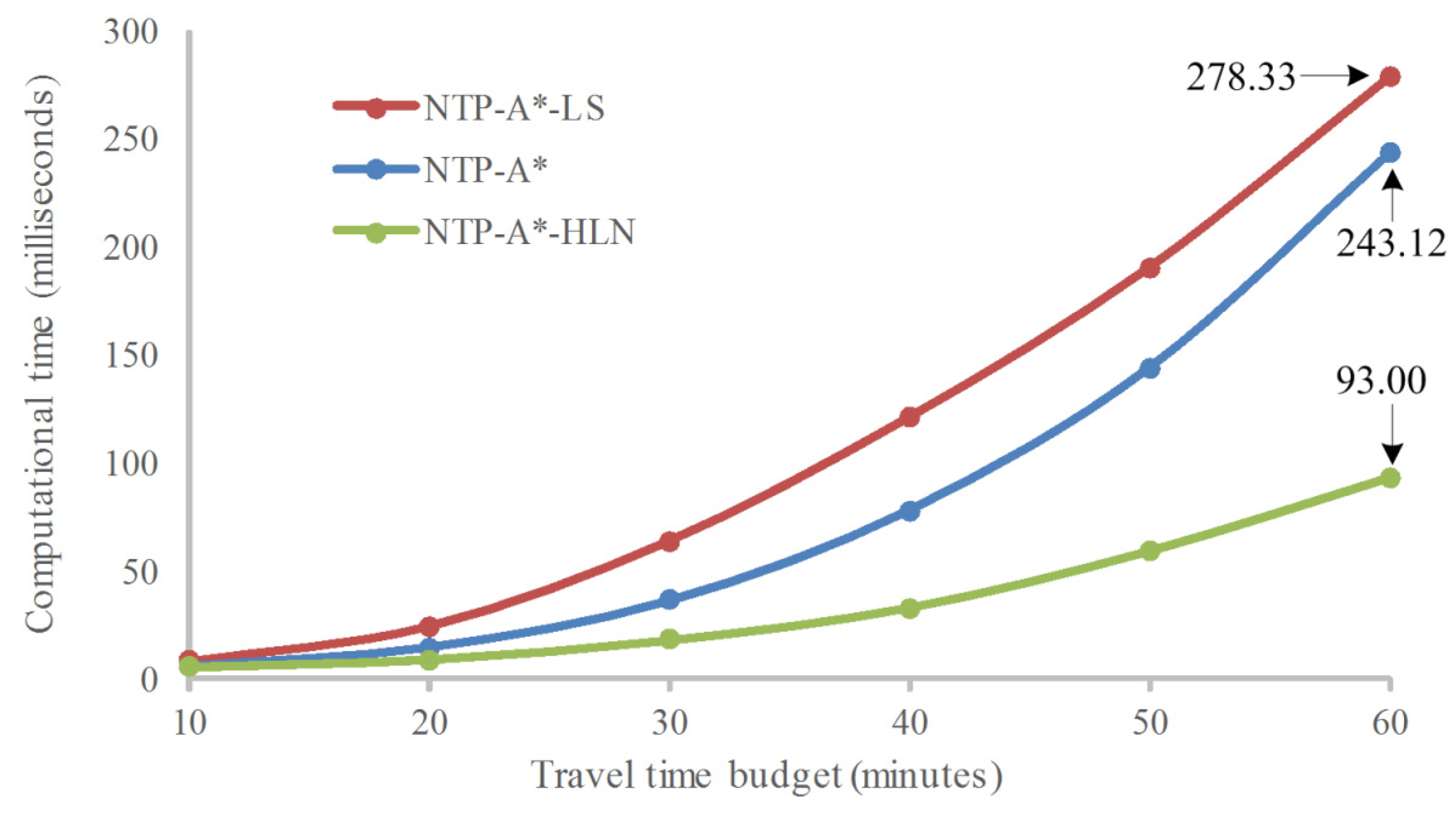
35] (called the NTP-A*-LS algorithm).
Figure 5 illustrates the computational performance of the NTP-A* and NTP-A*-LS algorithms in the Wuhan road network. As shown in the figure, the NTP-A* algorithm using the label-correcting technique runs faster than the NTP-A*-LS algorithm using the label-setting technique. This is because the priority queue structure in the label-setting technique was computationally expensive relative to the linked-list data structure used in the label-correcting technique.
The labeling techniques for considering turn restrictions were then examined. The NTP-A* algorithm (i.e., the R-FSP and R-BSP procedures) based on the link-based labeling technique can be further enhanced by using the hybrid link-node labeling technique [
36]. The hybrid link-node labeling technique adaptively uses the node-based labeling technique for unrestricted nodes without turn restrictions, and the link-based labeling technique for restricted nodes with turn restrictions. Using this hybrid link-node labeling technique, the number of paths generated, evaluated and maintained at unrestricted nodes can be reduced compared with the link-based labeling technique. Because the number of restricted nodes was small in most road networks (e.g., the Wuhan network), such a hybrid link-node labeling technique can significantly improve the computational performance of the R-BSP and R-BSP procedures. The enhanced algorithm was referred as the NTP-A*-HLN algorithm for convenience. As can be seen in the figure, the NTP-A*-HLN algorithm runs 1.99 times faster than the NTP-A* algorithm when
min.
The computational performance of the proposed NTP-A*-HLN algorithm was further examined using four road networks with different sizes. Two existing algorithms (NTP-Dij and NTP-SN) were also examined for comparison. In addition to the Wuhan network, three other networks, the Hong Kong RTIS, the Chicago Regional and the Beijing network, were obtained from References [
36,
38].
Table 2 gives the computational performance of the three algorithms. The reported computational performance was the average of 100 runs using randomly generated O-D pairs for each network. The travel time budget parameter was set as 30 min for all networks.
As can be seen from the table, the computational times of the three algorithms increased with the network size. The NTP-A*-HLN algorithm consumed only 2.85 ms for constructing NTPs in the Hong Kong RTIS with 3655 links. When the Beijing network was used, the size of the road network increased 30.39 times and the computational time increased by 17.24 times to 52.01 ms. Compared with the NTP-A*-HLN algorithm, the NTP-Dij algorithm degrades significantly with network size. For example, when the Beijing network was analyzed, the computational time required by the NTP-Dij algorithm increased by about 890.53 times (7809.83/8.76 − 1). This is because the NTP-Dij algorithm constructs the NTP by exploring the whole network twice. In this case, the computational time of the NTP-Dij algorithm is more sensitive to the network size. It can be observed from the table that the NTP-SN algorithm runs in a similar way to the NTP-Dij algorithm. This result confirmed that the effectiveness of constructing NTPs in the sub-networks using the STP in the planar space is marginal.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}