
A Novel Evaluation Approach for Line Simplification Algorithms towards Vector Map Visualization

Abstract
:1. Introduction
2. Related Work
3. Methodology of the Evaluation Based on a Consistent Strength of Simplification
3.1. Simplification-Related Factors
3.1.1. Display Resolution (Hres × Vres)
3.1.2. Display Size (Dscr)
3.1.3. Pixels per Inch (PPI)
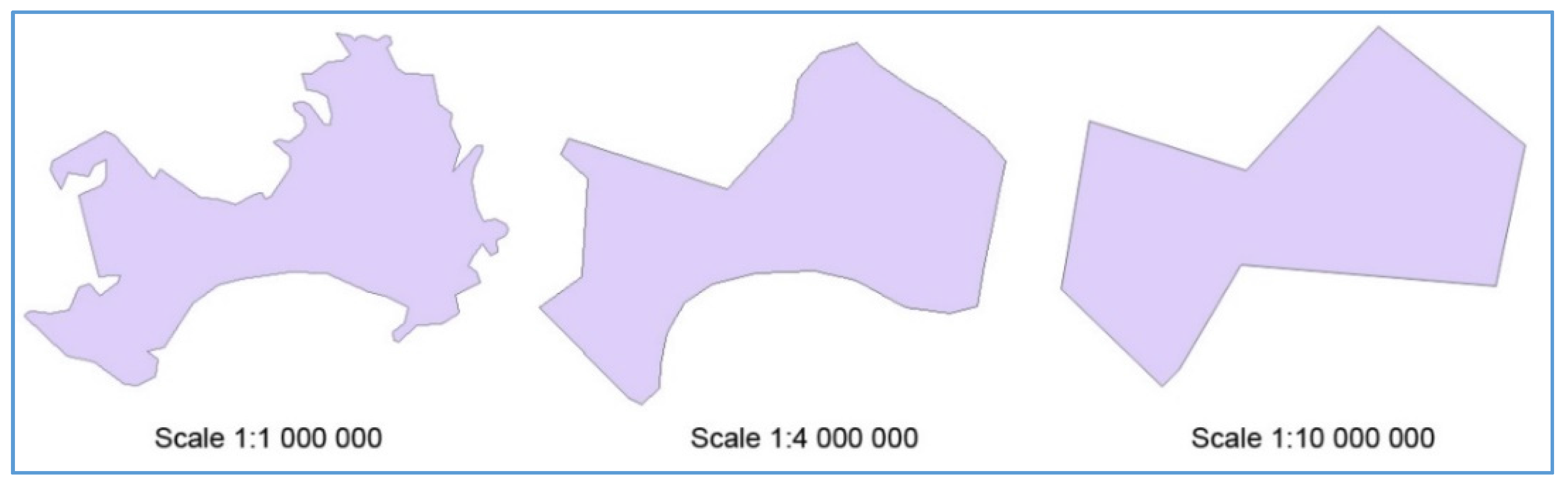
3.1.4. Map Scale (Scale)
3.1.5. Spatial Resolution of Pixels (SRpixel)
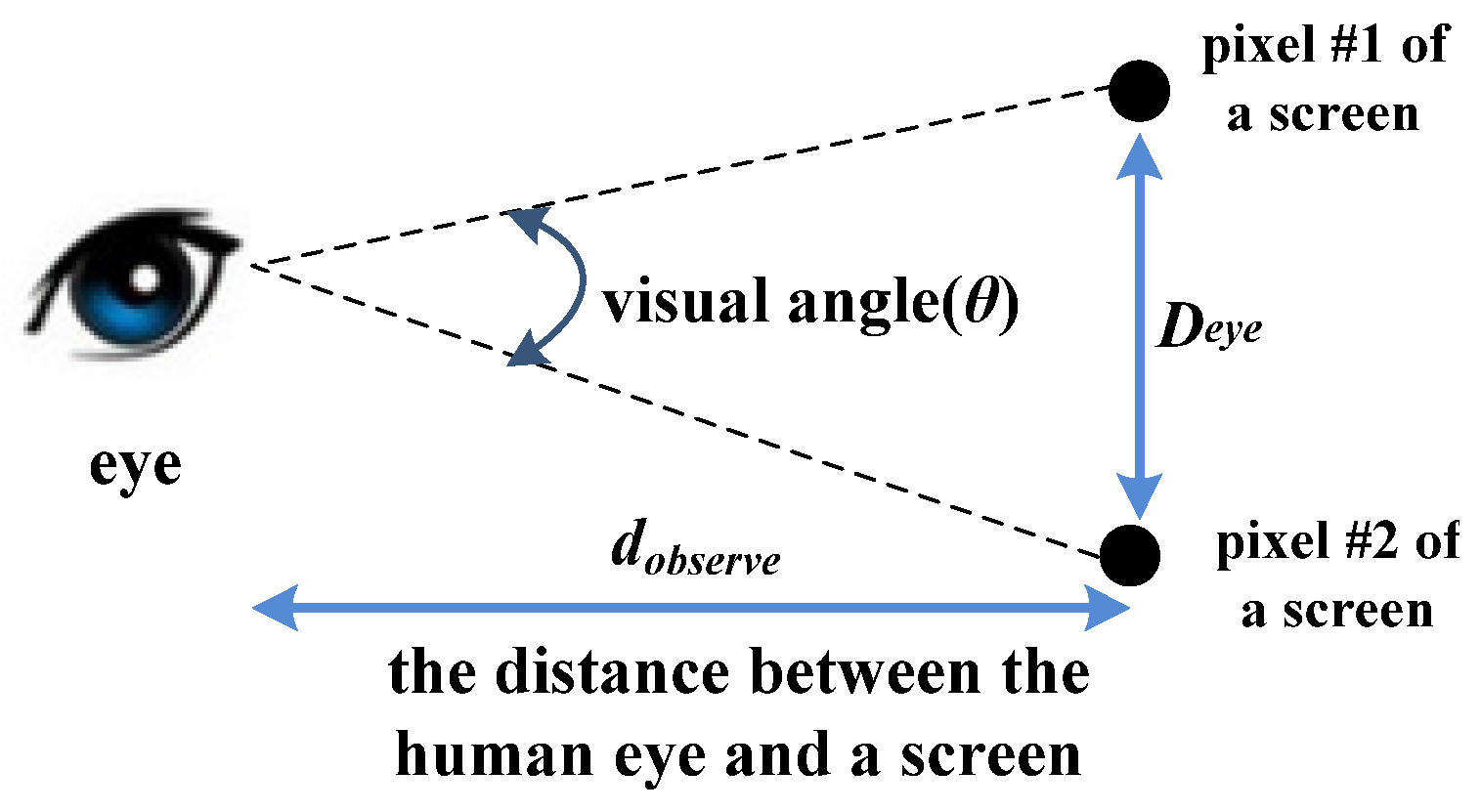
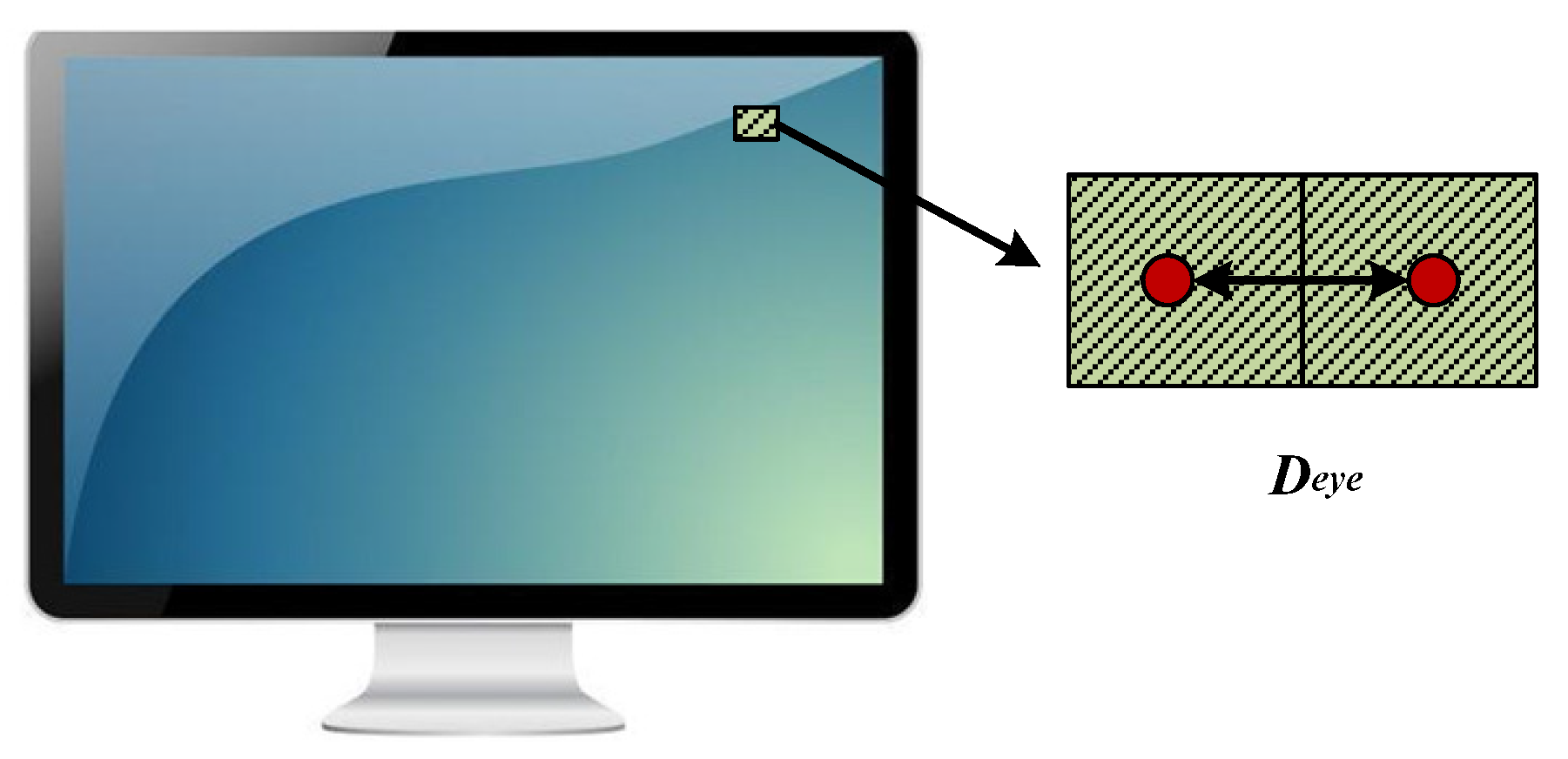
3.1.6. Resolution of the Human Eye
3.2. Appropriate Strength of Line Simplification
3.3. Evaluation Approach Based on a Consistent Strength of Simplification
4. Experiment and Results
4.1. Experimental Data and Enviroment
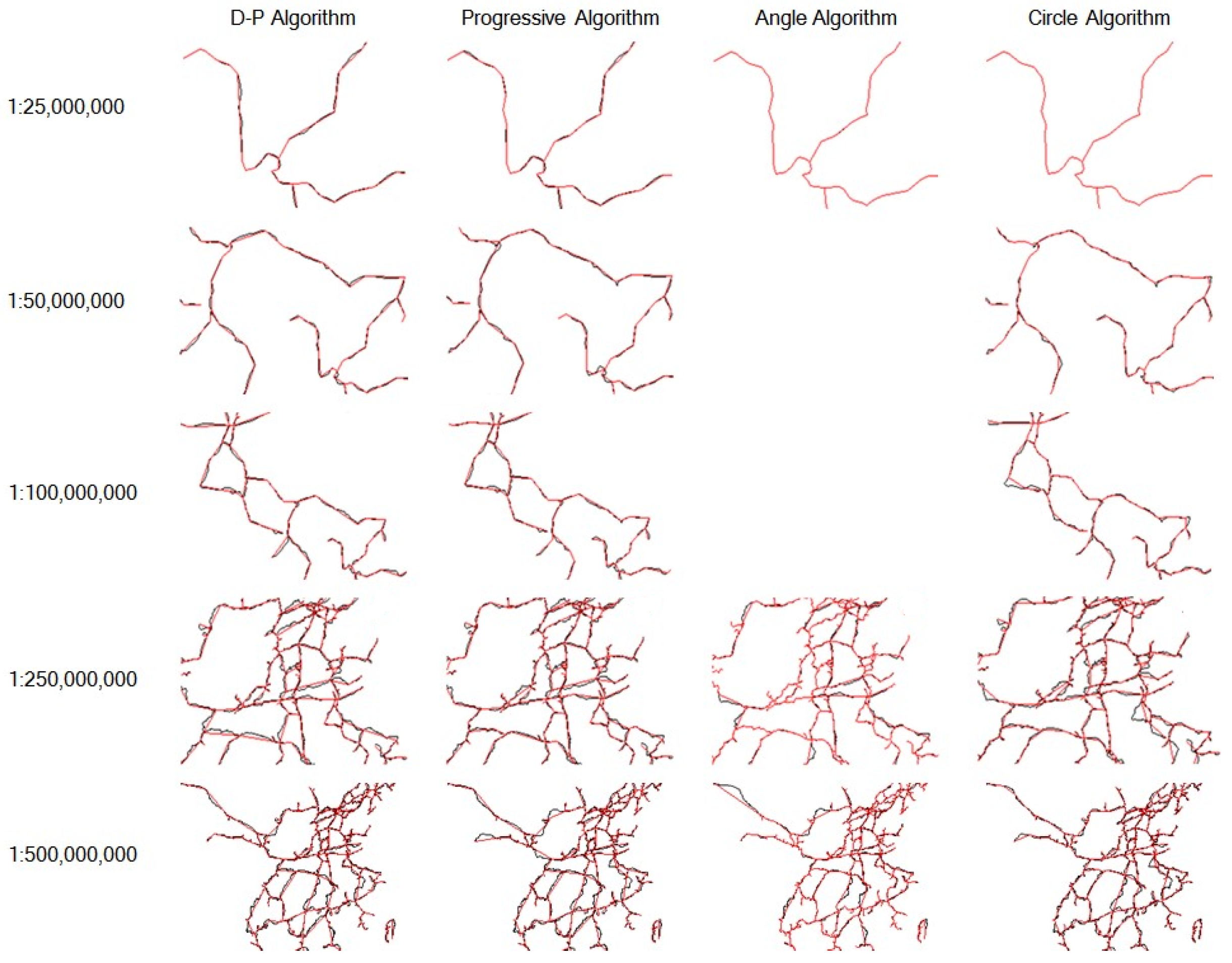
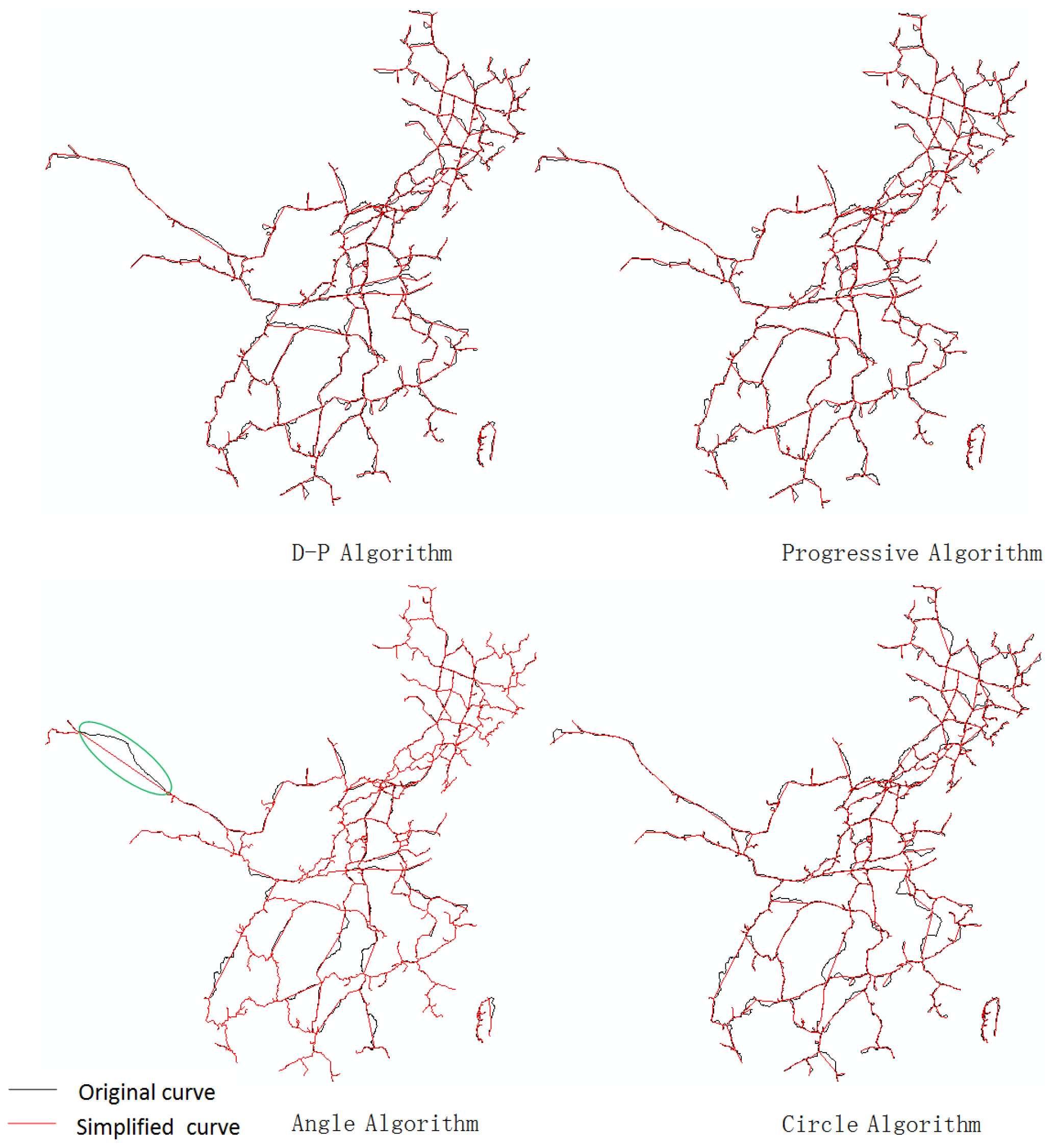
4.2. Results of the Simplification
4.3. Results of the Evaluation
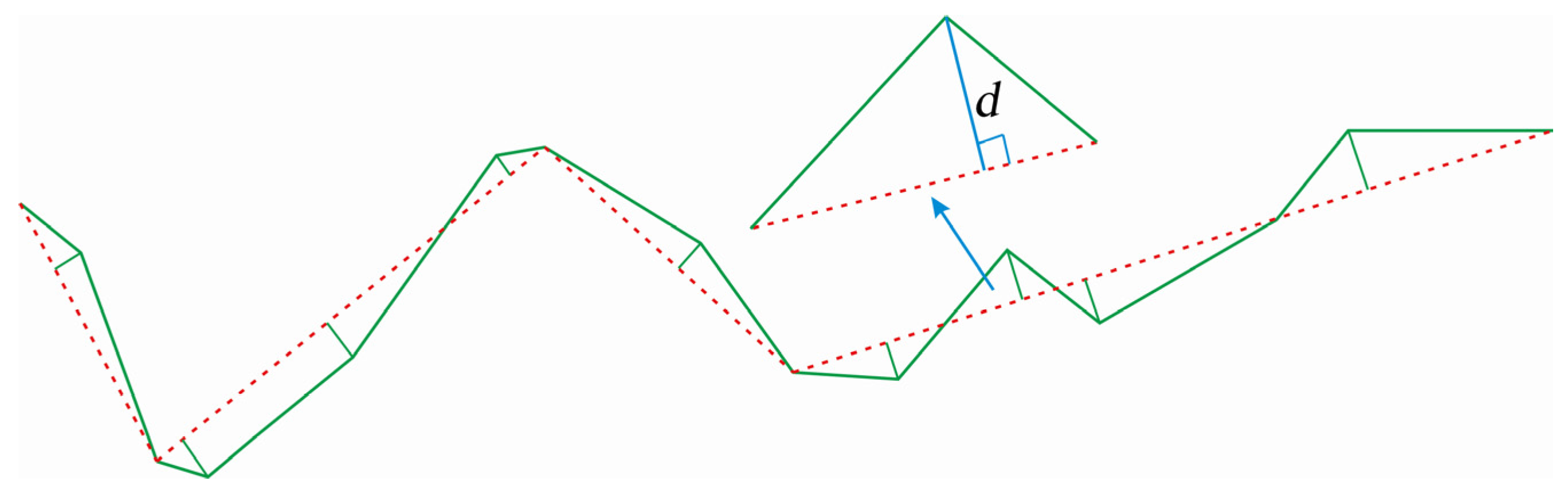
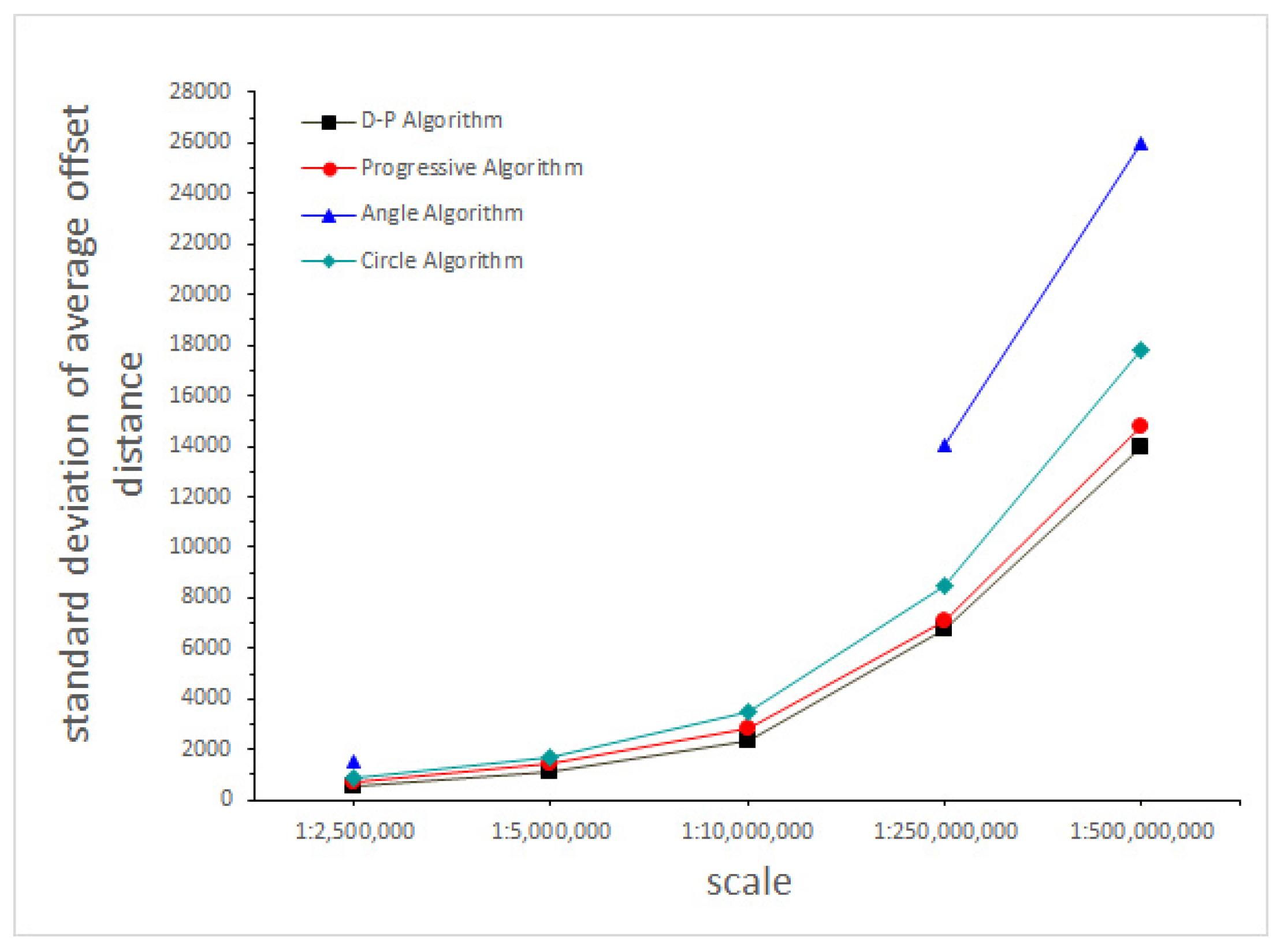
4.3.1. Standard Deviation of Average Offset Distance
4.3.2. Compression Ratio
4.3.3. Simplification Time
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jones, C.B.; Mark Ware, J. Map generalization in the web age. Int. J. Geogr. Inf. Sci. 2005, 19, 859–870. [Google Scholar] [CrossRef]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartogr. Int. J. Geogr. Inf. Geovis. 1973, 10, 112–122. [Google Scholar] [CrossRef]
- Reumann, K.; Witkam, A.P.M. Optimizing curve segmentation in computer graphics. In Proceedings of the International Computing Symposium, Davos, Switzerland, 4–7 September 1973; pp. 467–472.
- Rangayyan, R.M.; Guliato, D.; de Carvalho, J.D.; Santiago, S. Polygonal approximation of contours based on the turning angle function. J. Electron. Imaging 2008, 17, 023016. [Google Scholar]
- Li, Z.; Openshaw, S. A natural principle for the objective generalization of digital maps. Cartogr. Geogr. Inf. Syst. 1993, 20, 19–29. [Google Scholar] [CrossRef]
- Qingsheng, G.; Brandenberger, C.; Hurni, L. A progressive line simplification algorithm. Geo-Spat. Inf. Sci. 2002, 5, 41–45. [Google Scholar] [CrossRef]
- Lang, T. Rules for robot draughtsmen. Geogr. Mag. 1969, 42, 50–51. [Google Scholar]
- McMaster, R.B. Automated line generalization. Cartogr. Int. J. Geogr. Inf. Geovis. 1987, 24, 74–111. [Google Scholar] [CrossRef]
- Zhao, Z.; Saalfeld, A. Linear-time sleeve-fitting polyline simplification algorithms. In Proceedings of the Annual Convention and Exposition Technical Papers (AutoCarto), Seattle, WA, USA, 7–10 April 1997; Volume 13, pp. 214–223.
- Visvalingam, M.; Whyatt, J.D. Line generalisation by repeated elimination of points. Cartogr. J. 1993, 30, 46–51. [Google Scholar] [CrossRef]
- Qian, H.; Liu, Y.; Zhang, L.; Niu, H. Map generalization algorithm research based on circle characters. Hydrogr. Surv. Charting 2005, 25, 14–17. (In Chinese) [Google Scholar]
- Guilbert, E.; Saux, E. Cartographic generalisation of lines based on a B-spline snake model. Int. J. Geogr. Inf. Sci. 2008, 22, 847–870. [Google Scholar] [CrossRef]
- Balboa, J.L.G.; López, F.J.A. Sinuosity pattern recognition of road features for segmentation purposes in cartographic generalization. Pattern Recognit. 2009, 42, 2150–2159. [Google Scholar] [CrossRef]
- Veregin, H. Quantifying positional error induced by line simplification. Int. J. Geogr. Inf. Sci. 2000, 14, 113–130. [Google Scholar] [CrossRef]
- Cheung, C.K.; Shi, W. Estimation of the positional uncertainty in line simplification in GIS. Cartogr. J. 2004, 41, 37–45. [Google Scholar] [CrossRef]
- Shi, W.; Cheung, C.K. Performance evaluation of line simplification algorithms for vector generalization. Cartogr. J. 2006, 43, 27–44. [Google Scholar] [CrossRef]
- Zhu, K.P.; Wu, F. Error propagation model of linear features’ simplification algorithms. Geomat. Inf. Sci. Wuhan Univ. 2007, 32, 932–935. (In Chinese) [Google Scholar]
- Wu, F.; Zhu, K.P. Geometric accuracy assessment of linear features’ simplification algorithms. Geomat. Inf. Sci. Wuhan Univ. 2008, 33, 600–603. (In Chinese) [Google Scholar]
- Chen, B.; Zhu, K.P.; Xue, B.X. Analysis and assessment of linear features simplification algorithms. J. Zhengzhou Inst. Surv. Mapp. 2007, 24, 121–124. (In Chinese) [Google Scholar]
- Liu, P.C.; Luo, J.; Ai, T.H.; Li, C. Line features comprehensive evaluation model based on shape similarity. Geomat. Inf. Sci. Wuhan Univ. 2012, 37, 114–117. (In Chinese) [Google Scholar]
- Cao, Z.Z.; Li, M.C.; Xu, J.H. The measure of graphic similarity in cross-scaling. Sci. Surv. Mapp. 2013, 38, 131–132. (In Chinese) [Google Scholar]
- Cao, Z.Z. A similarity measurement model for multi-resolution transmission of curve datasets over the internet. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 1257–1260. (In Chinese) [Google Scholar]
- Deng, M.; Fan, Z.D.; Liu, H.M. Performance evaluation of line simplification algorithms based on hierarchical information content. Acta Geod. Cartogr. Sin. 2013, 42, 767–773. (In Chinese) [Google Scholar]
- Guo, L.S.; Shen, J.; Zhu, W. The time complexity of linear features simplification algorithms. J. Zhengzhou Inst. Surv. Mapp. 2012, 29, 226–230. (In Chinese) [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scale * | 1:2.5 M | 1:5 M | 1:10 M | 1:25 M | 1:50 M |
|---|---|---|---|---|---|
| Dground (meters) | 705 | 1411 | 2822 | 7055 | 14,111 |
| Scale * | 1:2.5 M | 1:5 M | 1:10 M | 1:25 M | 1:50 M | |
|---|---|---|---|---|---|---|
| Algorithm (Threshold) | ||||||
| D-P (vertical distance) | 1736 m | 4215 m | 9543 m | 33918 m | 79572 m | |
| Progressive(area) | 17 km2 | 73 km2 | 295.198 km2 | 2774 km2 | 15,373.778 km2 | |
| Angle (degree) | 2.21° | -- | -- | 4.53° | 5.62° | |
| Circle (radius) | 3.441 | 0.5547 | 0.2197 | 0.06091 | 0.0431 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Miao, R. A Novel Evaluation Approach for Line Simplification Algorithms towards Vector Map Visualization. ISPRS Int. J. Geo-Inf. 2016, 5, 223. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5120223
Song J, Miao R. A Novel Evaluation Approach for Line Simplification Algorithms towards Vector Map Visualization. ISPRS International Journal of Geo-Information. 2016; 5(12):223. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5120223
Chicago/Turabian StyleSong, Jia, and Ru Miao. 2016. "A Novel Evaluation Approach for Line Simplification Algorithms towards Vector Map Visualization" ISPRS International Journal of Geo-Information 5, no. 12: 223. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5120223