
A Line Graph-Based Continuous Range Query Method for Moving Objects in Networks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
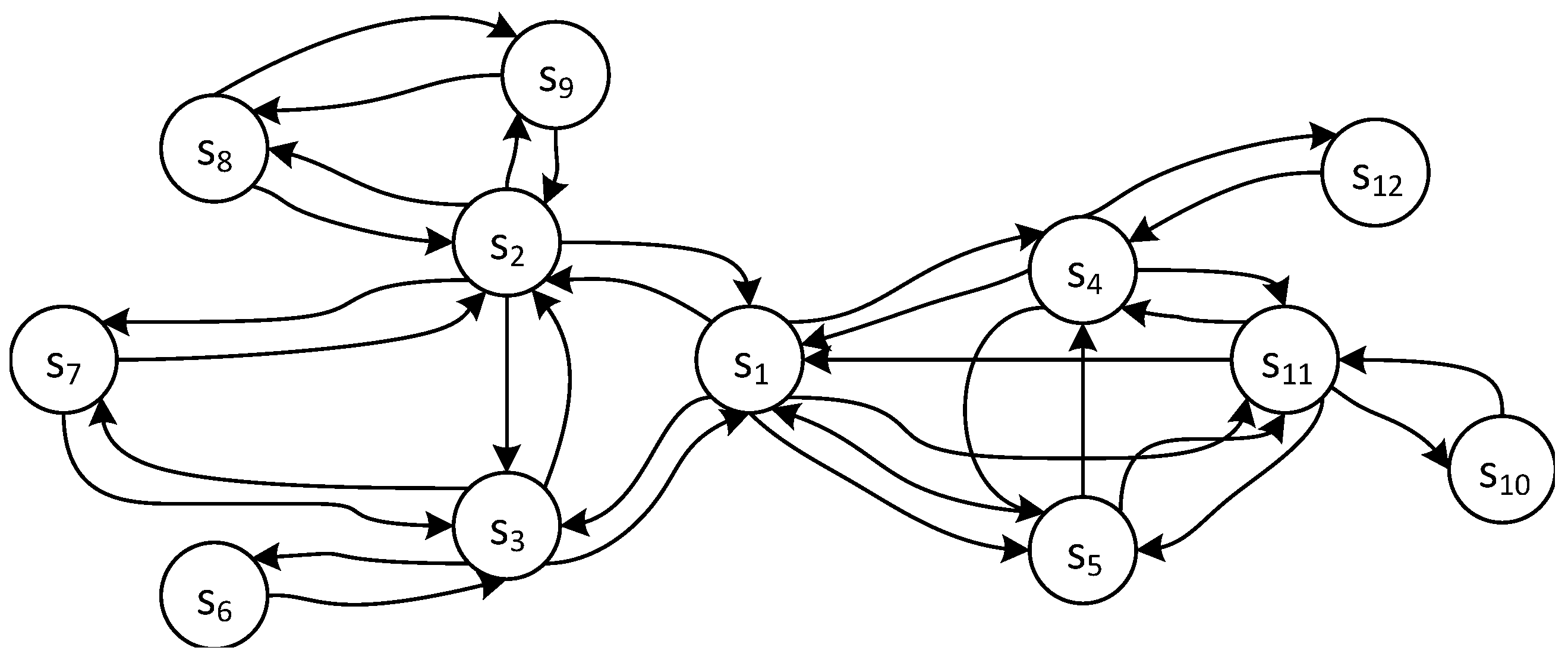
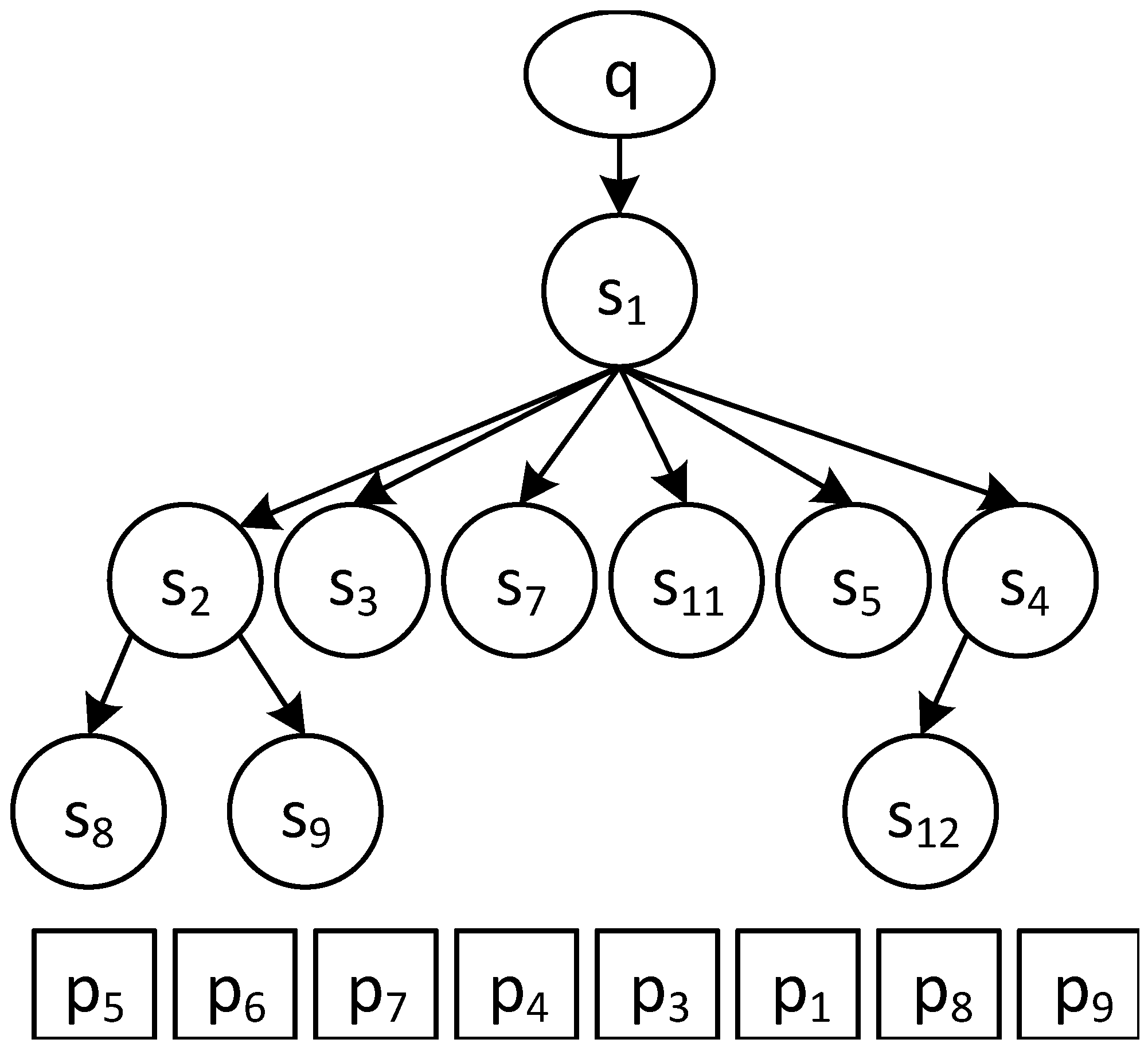
- We develop a novel graph-based expansion tree (GET) based on the line graph model of networks. It supports offline pre-computation and could effectively reduce the online maintenance time of the traditional expansion tree in continuous queries.
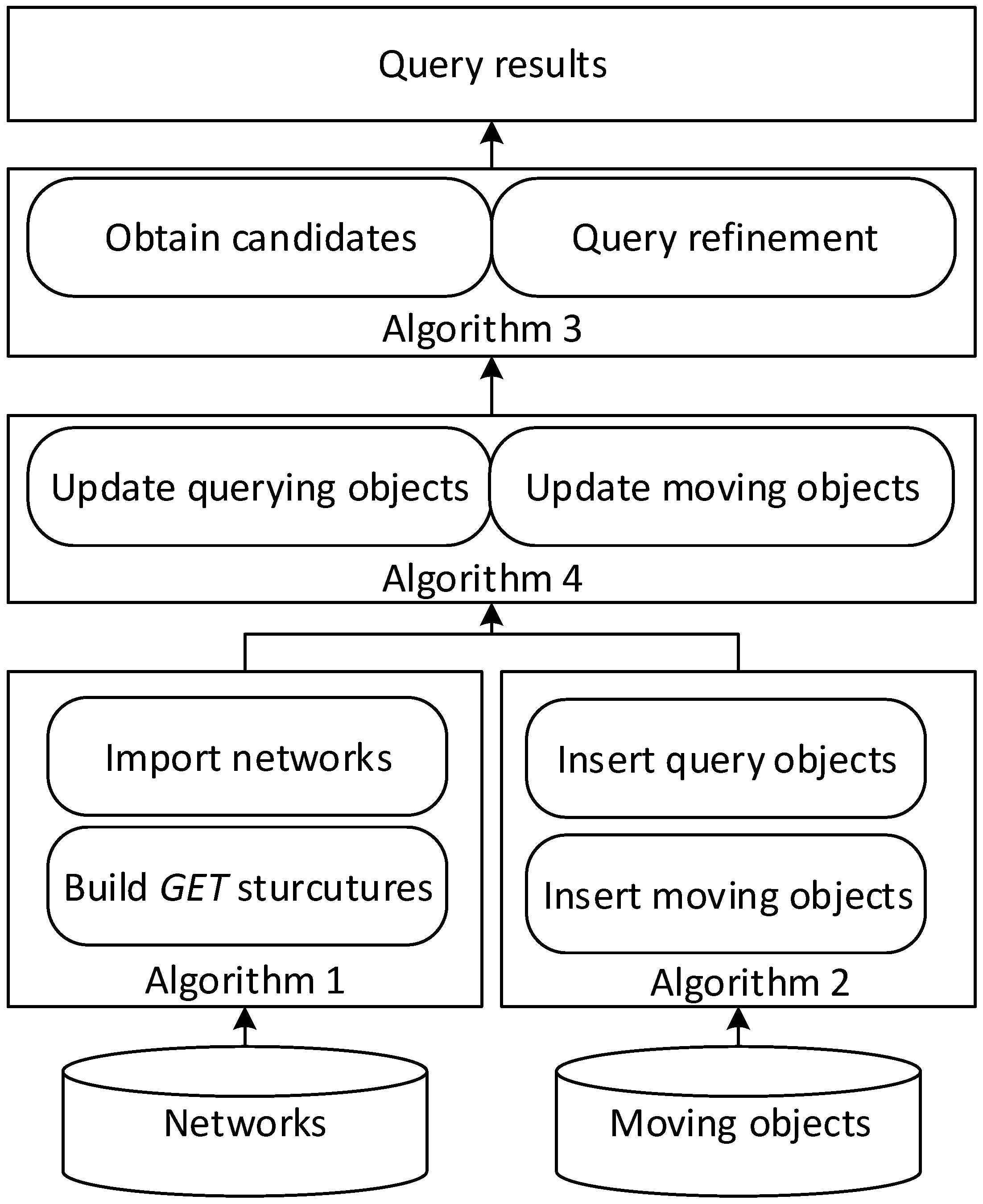
- Based on GET, we propose a line graph-based continuous range (LGCR) query algorithm for moving objects in networks, including the algorithms for initialization, insertion, location update, filter and refinement.
- We conducted experiments to evaluate our proposed LGCR using real-world networks and simulated moving objects and compare with existing classical algorithms to verify its effectiveness.
2. Related Work
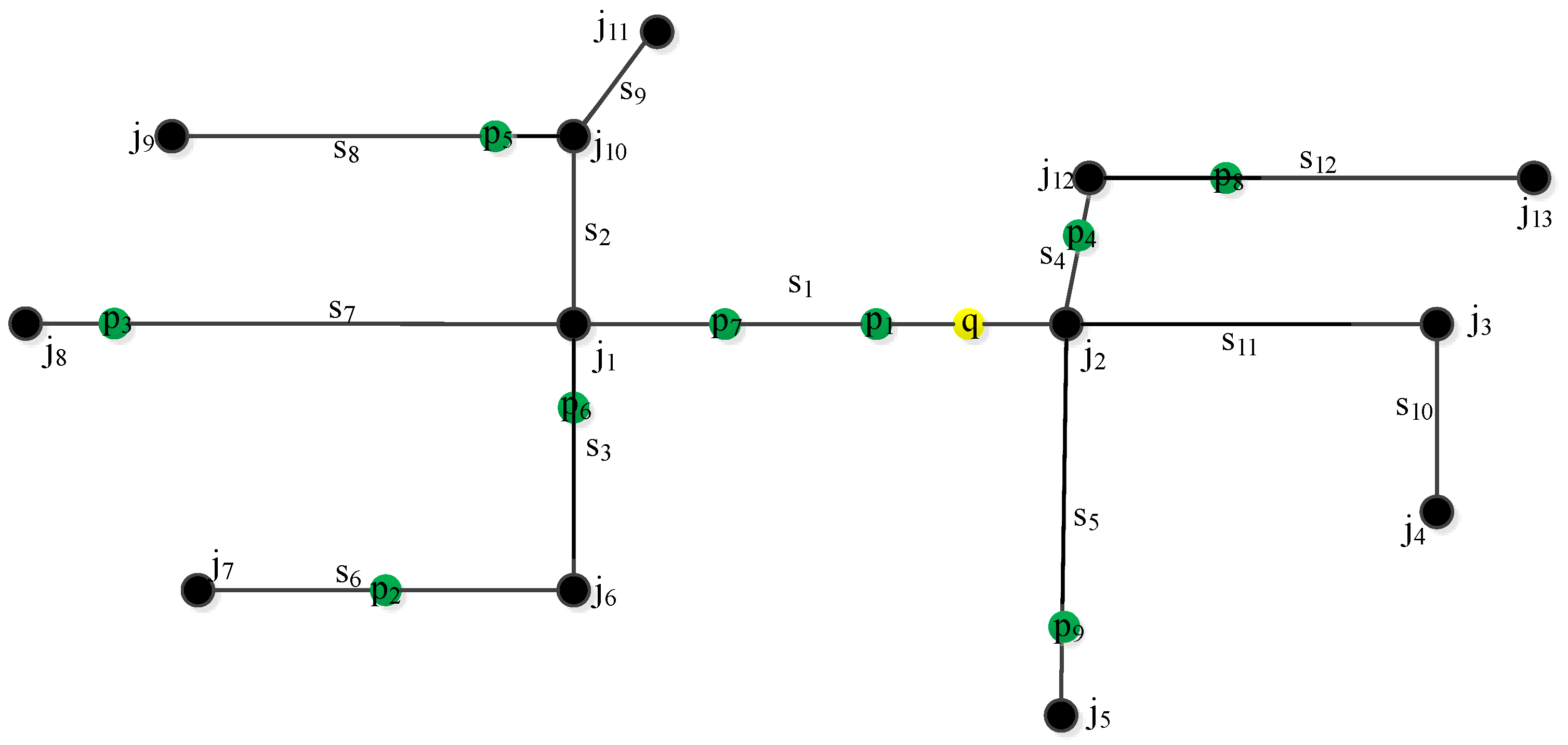
3. Proposed Data Structures
4. LGCR Query Algorithm
4.1. Algorithms
| Algorithm 1: Initialization algorithm. |
 |
| Algorithm 2: Insertion of moving objects and query objects. |
 |
| Algorithm 3: Filter and refinement step. |
 |
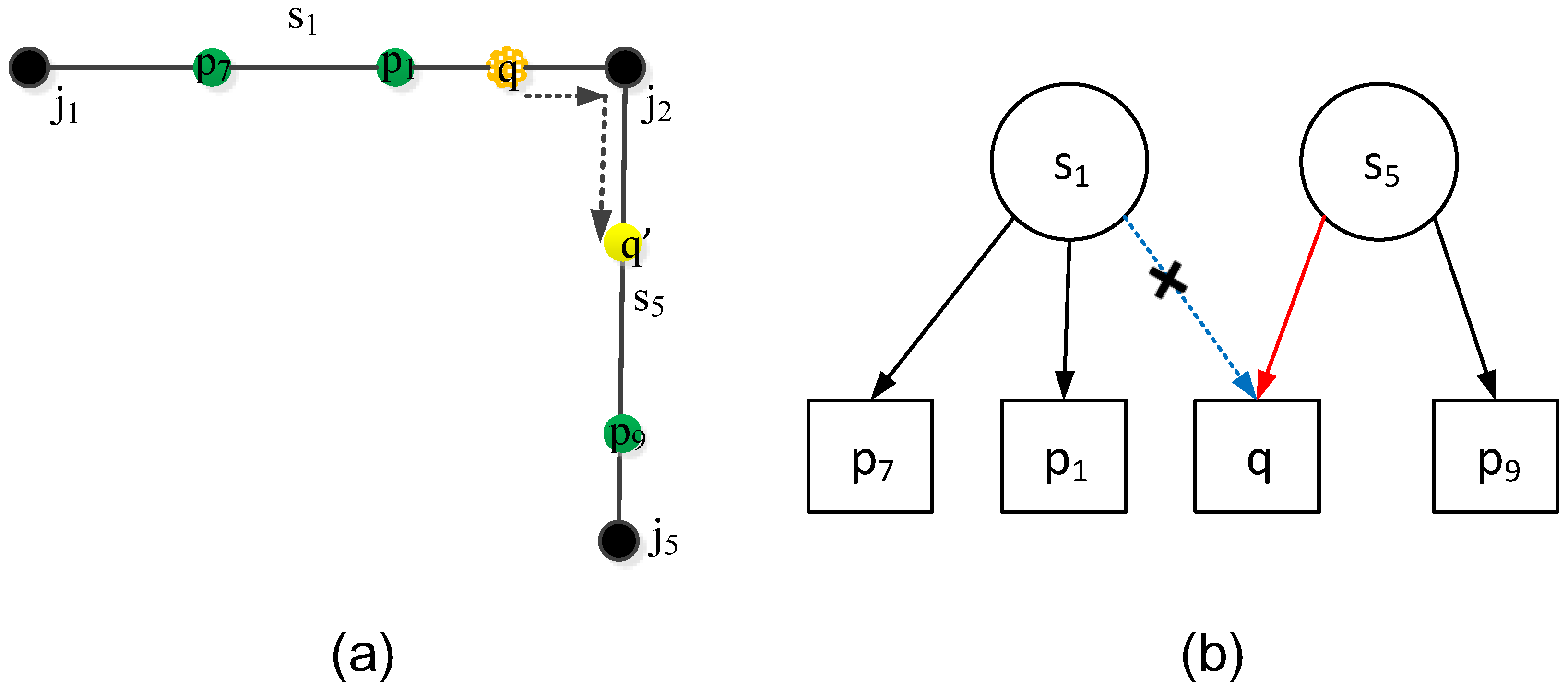
| Algorithm 4: Location update of a moving object or query object. |
 |
4.2. Analysis of the Algorithm’s Complexity
5. Experiments
5.1. Experimental Settings
5.2. Experimental Results
5.3. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wolfson, O.; Xu, B.; Chamberlain, S.; Jiang, L. Moving objects databases: Issues and solutions. In Proceedings of the 10th International Conference on Scientific and Statistical Database Management, Washington, DC, USA, 1–3 July 1998.
- Güting, R.H.; Ding, Z. Modeling and querying moving objects in networks. Int. J. Very Large Data Bases 2006, 15, 165–190. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Buonanno, A.; D’Urso, M.; Palmieri, F.A. Distributed classification of multiple moving targets with binary wireless sensor networks. In Proceedings of the 2011 Proceedings of the 14th International Conference on Information Fusion (FUSION), Chicago, IL, USA, 5–8 July 2011.
- Buonanno, A.; D’Urso, M.; Prisco, G.; Felaco, M.; Meliadò, E.; Mattei, M.; Palmieri, F.; Ciuonzo, D. Mobil sensor networks based on autonomous platforms for homeland security. In Proceedings of the 2012 Tyrrhenian Workshop on Advances in Radar and Remote Sensing (TyWRRS), Naples, Italy, 12–14 September 2012.
- Parent, C.; Spaccapietra, S.; Renso, C.; Andrienko, G.; Andrienko, N.; Bogorny, V.; Damiani, M.L.; Gkoulalas-Divanis, A.; Macedo, J.; Pelekis, N. Semantic trajectories modeling and analysis. ACM Comput. Surv. 2013, 45, 1–42. [Google Scholar] [CrossRef]
- Shekhar, S.; Jiang, Z.; Ali, R.Y.; Eftelioglu, E.; Tang, X.; Gunturi, V.; Zhou, X. Spatiotemporal Data Mining: A Computational Perspective. ISPRS Int. J. Geo-Inf. 2015, 4, 2306–2338. [Google Scholar] [CrossRef]
- Zheng, Y. Trajectory data mining: An overview. ACM Trans. Intell. Syst. Technol. 2015, 6, 1–29. [Google Scholar] [CrossRef]
- Cho, H.-J.; Ryu, K.; Chung, T.-S. An efficient algorithm for computing safe exit points of moving range queries in directed road networks. Inf. Syst. 2014, 41, 1–19. [Google Scholar] [CrossRef]
- Xuan, K.; Zhao, G.; Taniar, D.; Rahayu, W.; Safar, M.; Srinivasan, B. Voronoi-based range and continuous range query processing in mobile databases. J. Comput. Syst. Sci. 2011, 77, 637–651. [Google Scholar] [CrossRef]
- Zhu, T.; Wang, C.; Lv, W.; Huang, J. Continuous range monitoring of moving objects in road networks. In Proceedings of the 2010 10th International Conference on Intelligent Systems Design and Applications (ISDA), Cairo, Egypt, 29 November–1 December 2010.
- Yung, D.; Yiu, M.L.; Lo, E. A safe-exit approach for efficient network-based moving range queries. Data Knowl. Eng. 2012, 72, 126–147. [Google Scholar] [CrossRef]
- Zheng, K.; Trajcevski, G.; Zhou, X.; Scheuermann, P. Probabilistic range queries for uncertain trajectories on road networks. In Proceedings of the Proceedings of the 14th International Conference on Extending Database Technology, Uppsala, Sweden, 21–24 March 2011.
- Stojanovic, D.; Papadopoulos, A.N.; Predic, B.; Djordjevic-Kajan, S.; Nanopoulos, A. Continuous range monitoring of mobile objects in road networks. Data Knowl. Eng. 2008, 64, 77–100. [Google Scholar] [CrossRef]
- Huang, Y.K.; Chen, Z.W.; Lee, C. Continuous k-nearest neighbor query over moving objects in road networks. Adv. Data Web Manag. 2009, 5446, 27–38. [Google Scholar]
- Jensen, C.S.; Kolářvr, J.; Pedersen, T.B.; Timko, I. Nearest neighbor queries in road networks. In Proceedings of the ACM International Symposium on Advances in Geographic Information Systems, New Orleans, LA, USA, 3–8 November 2003.
- Kolahdouzan, M.R.; Shahabi, C. Continuous k-nearest neighbor queries in spatial network databases. In Proceedings of the STDBM’04, Toronto, ON, Canada, 30 August 2004.
- Safar, M.; Ibrahimi, D.; Taniar, D. Voronoi-based reverse nearest neighbor query processing on spatial networks. Multimedia Syst. 2009, 15, 295–308. [Google Scholar] [CrossRef]
- Safar, M.; El-Amin, D.; Taniar, D. Optimized skyline queries on road networks using nearest neighbors. Pers. Ubiquitous Comput. 2011, 15, 845–856. [Google Scholar] [CrossRef]
- Hao, X.; Meng, X.; Xu, J. Continuous density queries for moving objects. In Procedings of the ACM International Workshop on Data Engineering for Wireless and Mobile Access, Vancouver, BC, Canada, 13 June 2008.
- Jensen, C.S.; Lin, D.; Ooi, B.C.; Zhang, R. Effective Density Queries on Continuously Moving Objects. In Procedings of the International Conference on Data Engineering, Atlanta, GA, USA, 3–8 April 2006.
- Gao, Y.; Zheng, B.; Chen, G.; Li, Q.; Guo, X. Continuous visible nearest neighbor query processing in spatial databases. VLDB J. 2011, 20, 371–396. [Google Scholar] [CrossRef]
- Alamri, S.; Taniar, D.; Safar, M. A taxonomy for moving object queries in spatial databases. Future Gener. Comput. Syst. 2014, 37, 232–242. [Google Scholar] [CrossRef]
- Gaede, V.; Günther, O. Multidimensional access methods. ACM Comput. Surv. 1998, 30, 170–231. [Google Scholar] [CrossRef]
- Guo, X.; Zheng, B.; Ishikawa, Y.; Gao, Y. Direction-based surrounder queries for mobile recommendations. VLDB J. 2011, 20, 743–766. [Google Scholar] [CrossRef]
- Jung, H.; Kim, Y.S.; Chung, Y.D. QR-tree: An efficient and scalable method for evaluation of continuous range queries. Inf. Sci. 2014, 274, 156–176. [Google Scholar] [CrossRef]
- Tao, Y.; Xiao, X.; Cheng, R. Range search on multidimensional uncertain data. ACM Trans. Database Syst. 2007, 32, 1–15. [Google Scholar] [CrossRef]
- Xu, J.; Güting, R.H.; Zheng, Y. The TM-RTree: An index on generic moving objects for range queries. GeoInformatica 2015, 19, 487–524. [Google Scholar] [CrossRef]
- Sowell, B.; Salles, M.V.; Cao, T.; Demers, A.; Gehrke, J. An experimental analysis of iterated spatial joins in main memory. Proc. VLDB Endow. 2013, 6, 1882–1893. [Google Scholar] [CrossRef]
- Taniar, D.; Rahayu, W. A taxonomy for region queries in spatial databases. J. Comput. Syst. Sci. 2014, 81, 1508–1531. [Google Scholar] [CrossRef]
- Huang, Y.K.; Lin, L.F.; Chung, Y.C.; Su, I.F. Continuous min-max distance bounded query in road networks. In Web Technologies and Applications; Springer: Berlin, Germany, 2012; pp. 423–434. [Google Scholar]
- Long, J.A.; Nelson, T.A. A review of quantitative methods for movement data. Int. J. Geogr. Inf. Sci. 2013, 27, 292–318. [Google Scholar] [CrossRef]
- Mouratidis, K.; Yiu, M.L.; Papadias, D.; Mamoulis, N. Continuous nearest neighbor monitoring in road networks. In Proceedings of the 32nd International Conference on Very Large Data Bases, Seoul, Korea, 12–15 September 2006.
- Huang, Y.-K.; Lin, L.-F. Efficient processing of continuous min–max distance bounded query with updates in road networks. Inf. Sci. 2014, 278, 187–205. [Google Scholar] [CrossRef]
- Wang, H.; Zimmermann, R. Processing of continuous location-based range queries on moving objects in road networks. IEEE Trans. Knowl. Data Eng. 2011, 23, 1065–1078. [Google Scholar] [CrossRef]
- AL-Khalidi, H.; Taniar, D.; Betts, J.; Alamri, S. Dynamic safe regions for moving range queries in mobile navigation. Int. J. Ad Hoc Ubiquitous Comput. 2014, 16, 250–259. [Google Scholar] [CrossRef]
- Cheema, M.A.; Brankovic, L.; Lin, X.; Zhang, W.; Wang, W. Continuous monitoring of distance-based range queries. IEEE Trans. Knowl. Data Eng. 2011, 23, 1182–1199. [Google Scholar] [CrossRef]
- Papadias, D.; Zhang, J.; Mamoulis, N.; Tao, Y. Query Processing in Spatial Network Databases. In Proceedings of the 29th International Conference on Very Large Data Bases, Berlin, Germany, 9–12 September 2003.
- Egenhofer, M.J.; Franzosa, R.D. Point-set topological spatial relations. Int. J. Geogr. Inf. Syst. 1991, 5, 161–174. [Google Scholar] [CrossRef]
- Egenhofer, M.J.; Herring, J. A Mathematical Framework for the Definition of Topological Relationships. In Proceedings of the Fourth International Symposium on Spatial Data Handling, Zurich, Switzerland, 23–27 July 1990.
- Liu, F.; Do, T.; Hua, K. Dynamic range query in spatial network environments. In Database and Expert Systems Applications; Springer: Berlin, Germany, 2006; pp. 254–265. [Google Scholar]
- Ding, Z.; Guting, R.H. Managing moving objects on dynamic transportation networks. In Proceedings of the 16th International Conference on Scientific and Statistical Database Management, Santorini Island, Greece, 21–23 June 2004.
- GT-Mobisim. 2015. Available online: https://github.com/Sdcxv/gt-mobisim (accessed on 14 December 2016).










© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Lu, F.; Chen, J. A Line Graph-Based Continuous Range Query Method for Moving Objects in Networks. ISPRS Int. J. Geo-Inf. 2016, 5, 246. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5120246
Zhang H, Lu F, Chen J. A Line Graph-Based Continuous Range Query Method for Moving Objects in Networks. ISPRS International Journal of Geo-Information. 2016; 5(12):246. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5120246
Chicago/Turabian StyleZhang, Hengcai, Feng Lu, and Jie Chen. 2016. "A Line Graph-Based Continuous Range Query Method for Moving Objects in Networks" ISPRS International Journal of Geo-Information 5, no. 12: 246. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5120246