
Laser Scanning and Data Integration for Three-Dimensional Digital Recording of Complex Historical Structures: The Case of Mevlana Museum


Abstract
:1. Introduction
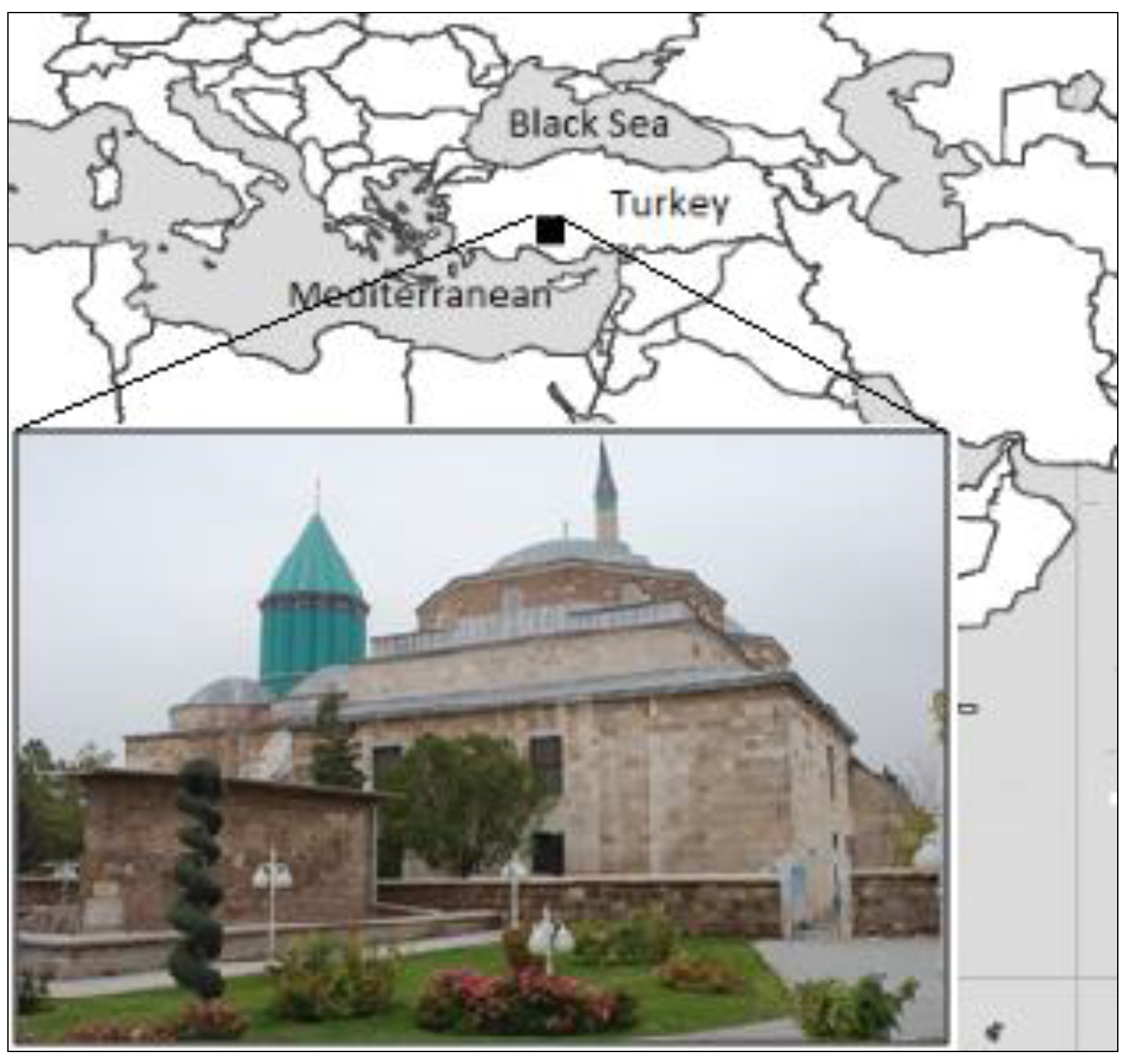
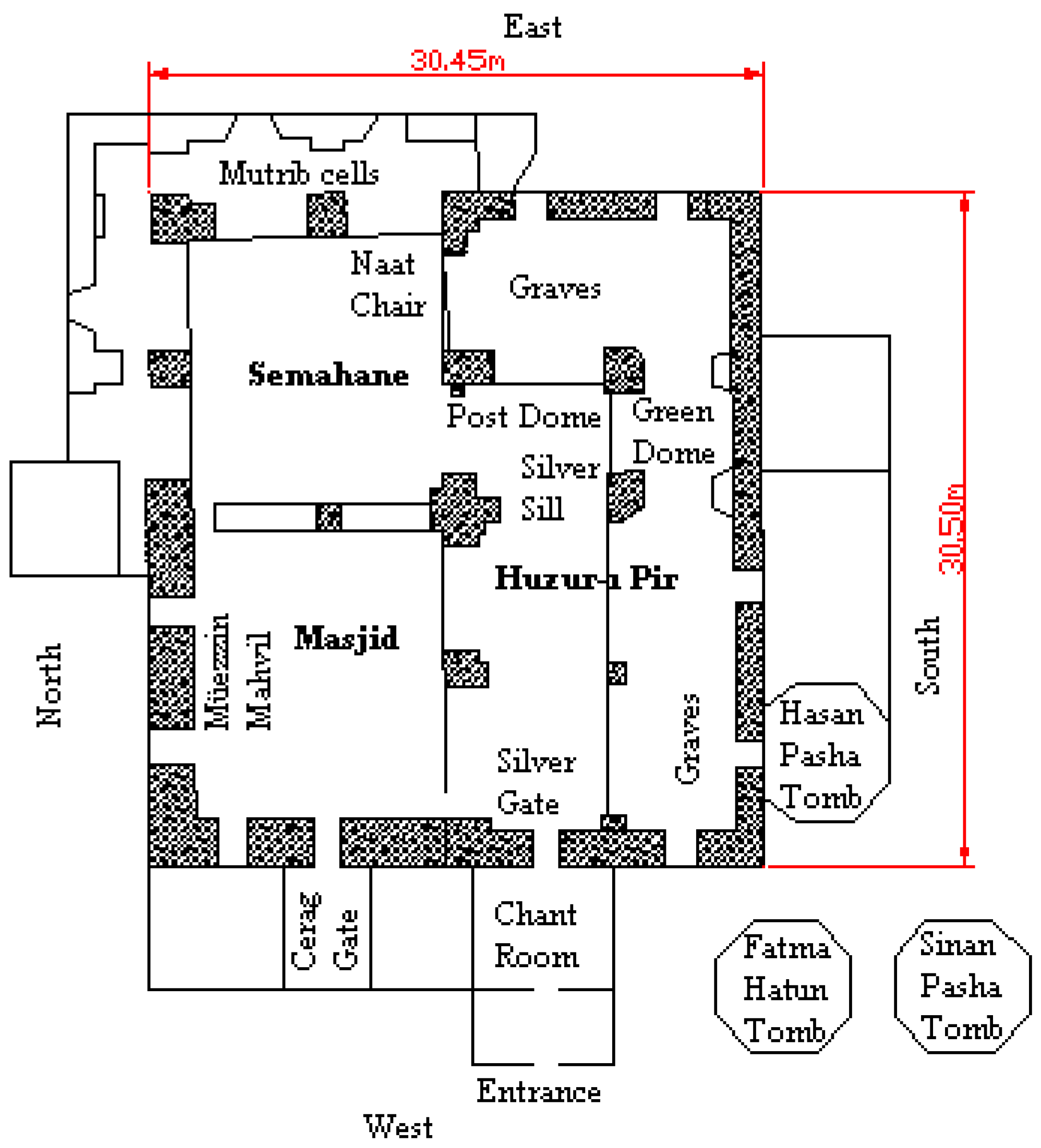
2. The Case Study: Mevlana Museum
3. Materials and Methods
3.1. Terrestrial Laser Scanning
3.2. Time-of-Flight (ToF) Imaging
4. Data Acquisition Process
4.1. Measurement of the Outside Surfaces
4.2. Measurement of the Indoor Environment
4.3. Image Acquisition
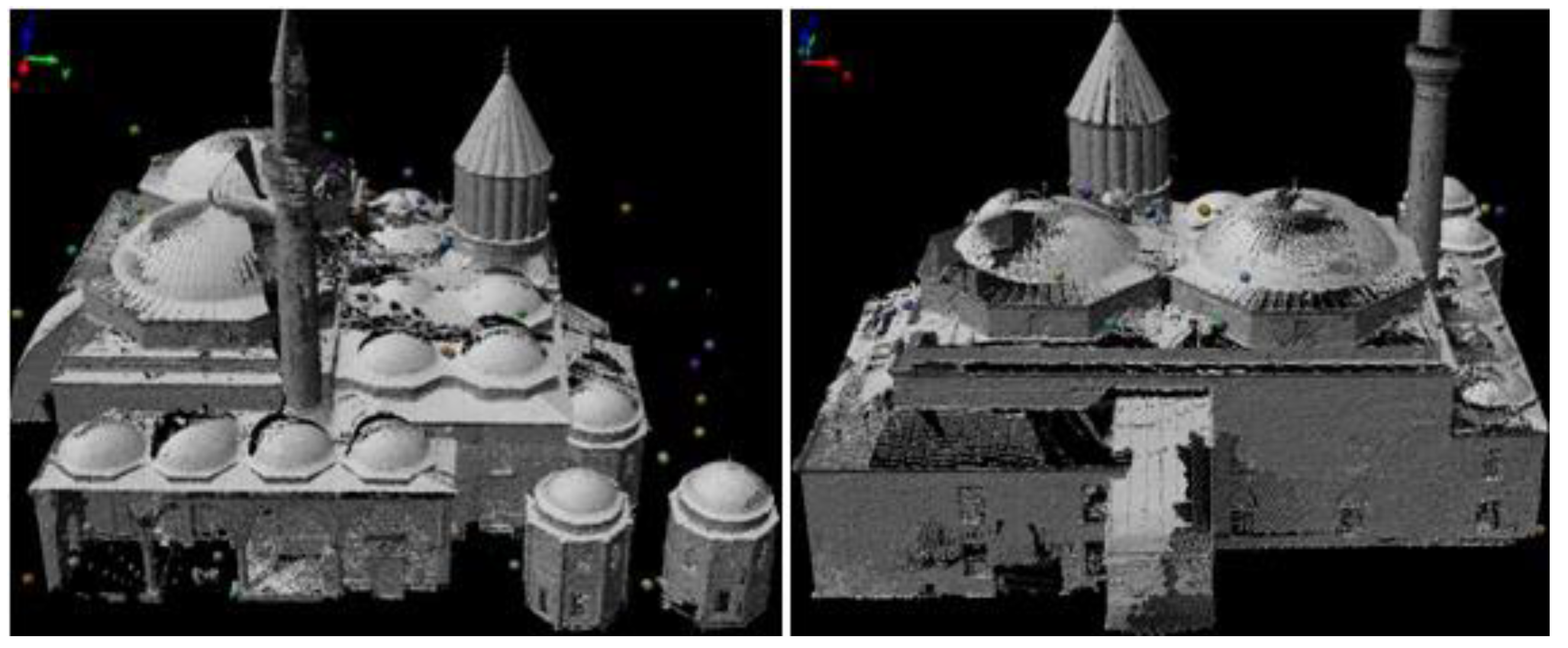
5. Creating 3D Point Cloud Model
5.1. Registration of Laser Scanner Measurements
5.2. Registration of ToF Camera Point Clouds
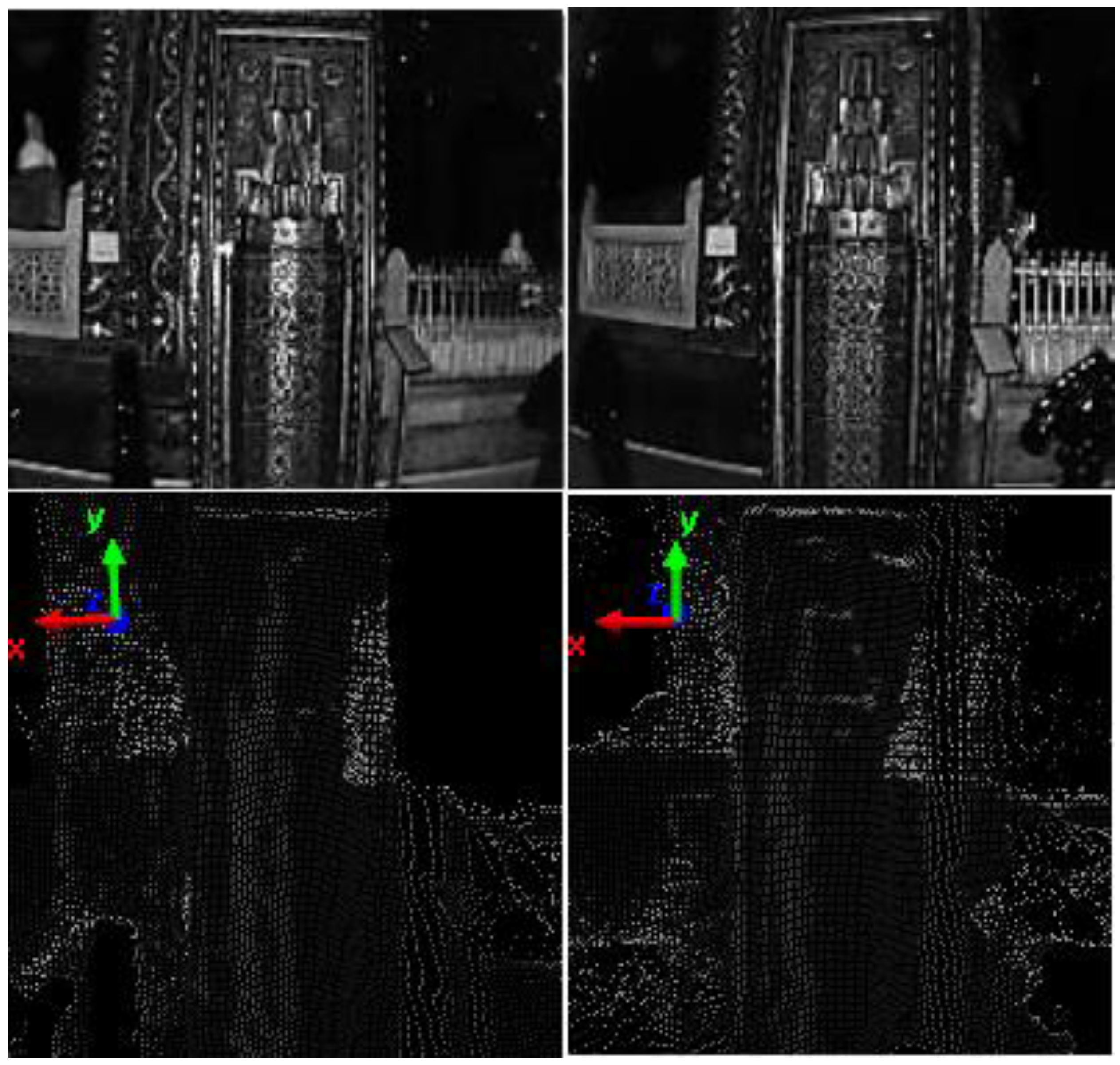
5.2.1. Case 1: Measurement of the Mihrab in Huzur-ı Pir Section
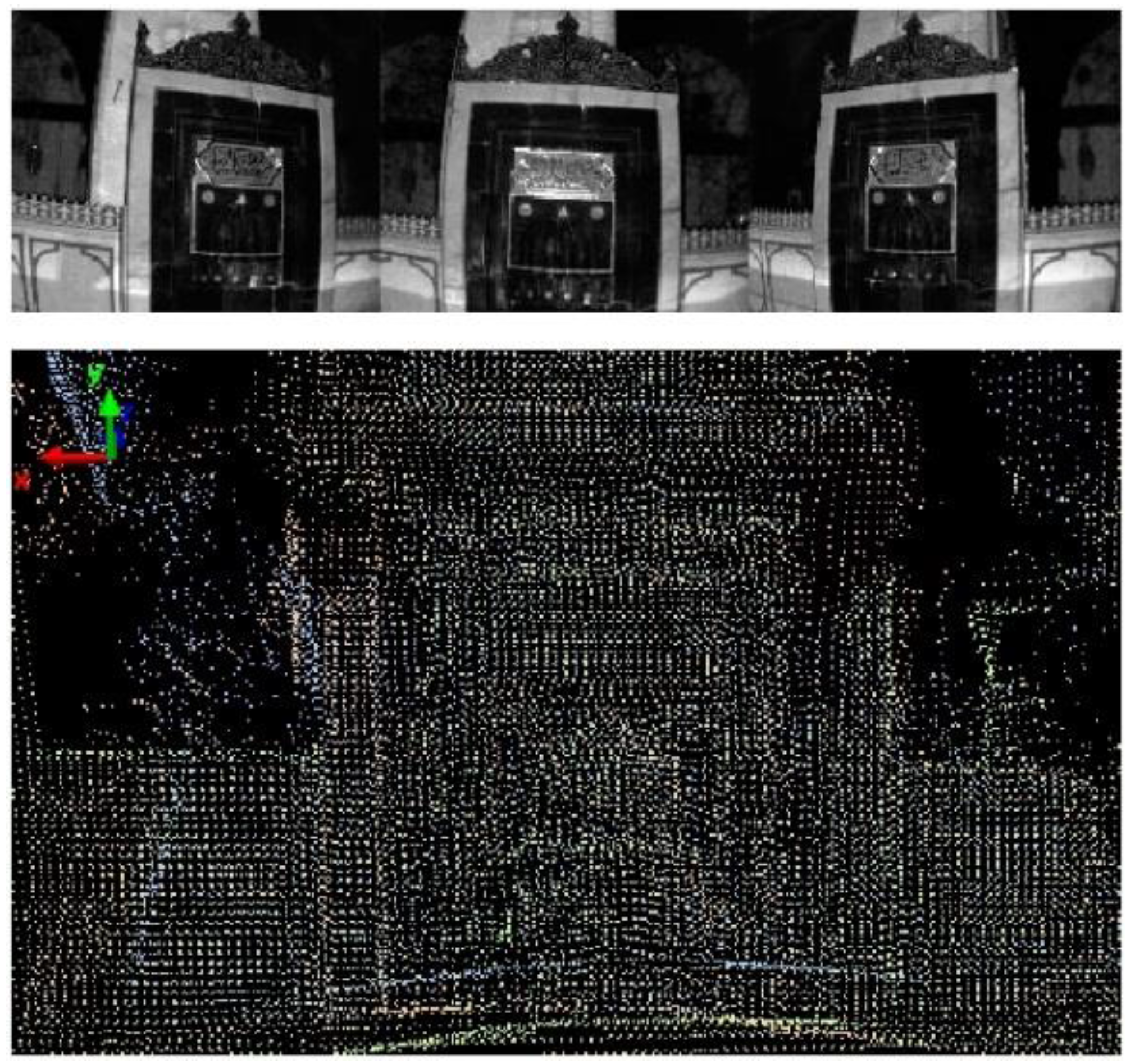
5.2.2. Case 2: Measurement of Mihrab on the Masjid
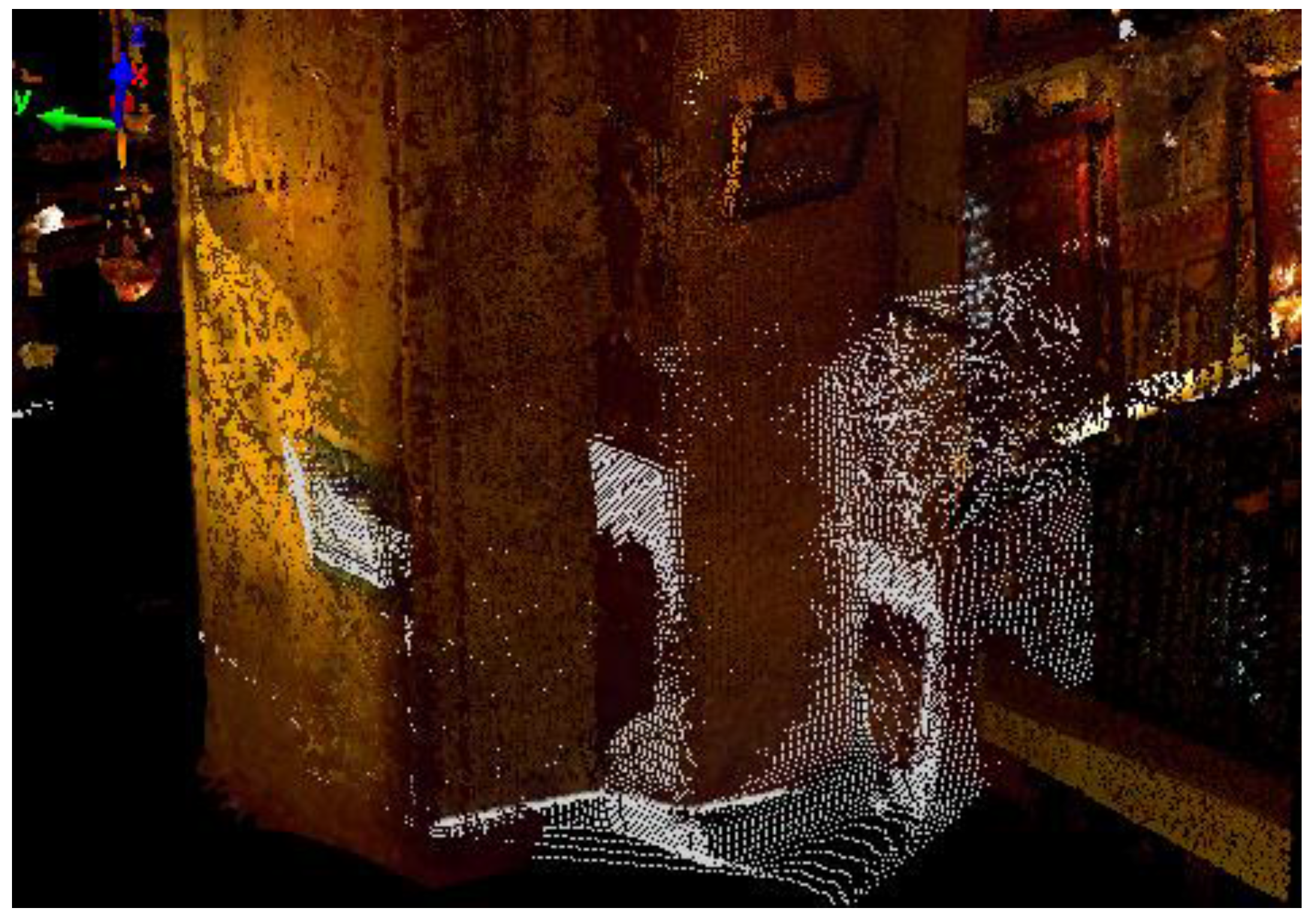
5.3. Integration of ToF Camera and TLS Data
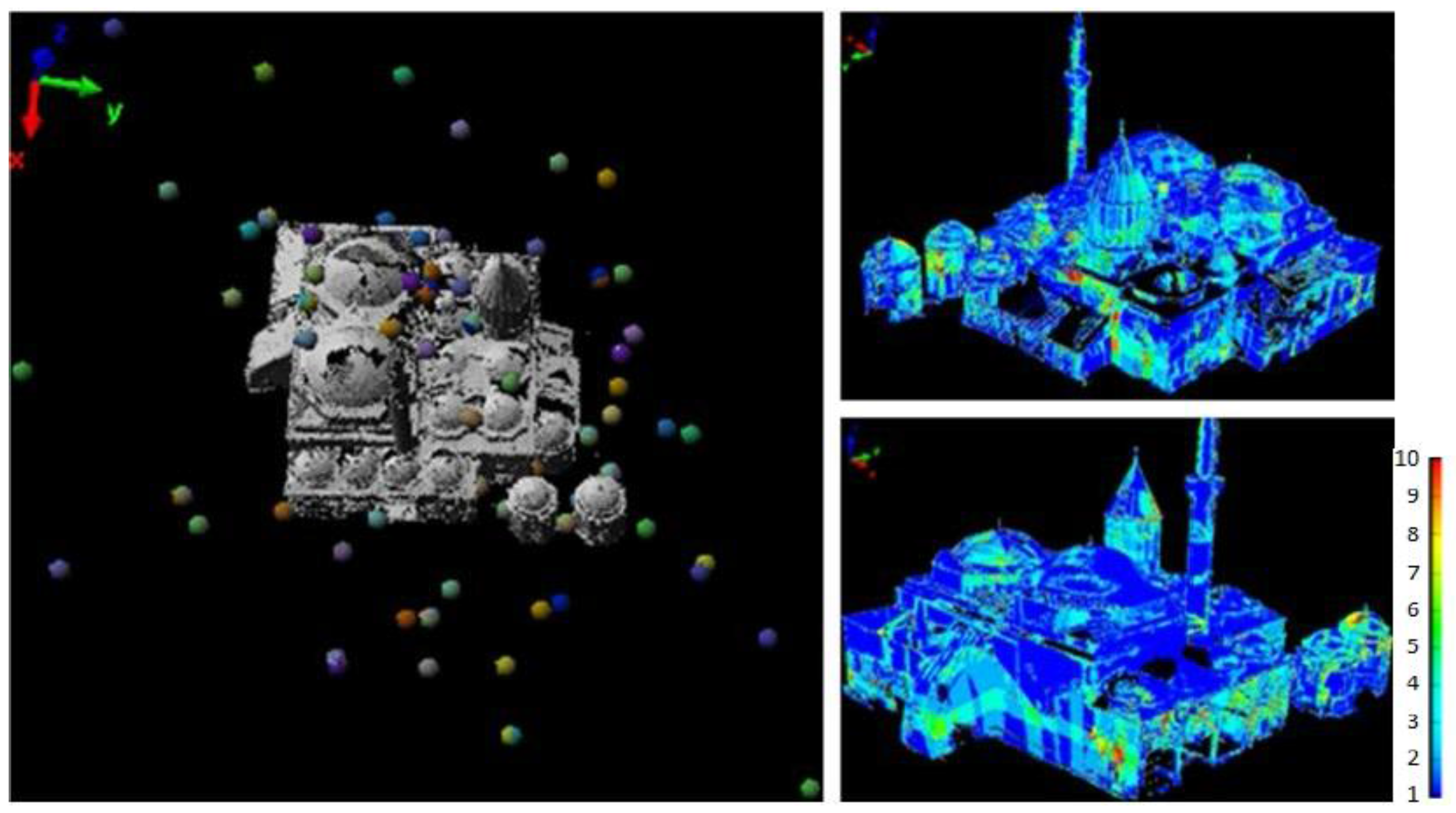
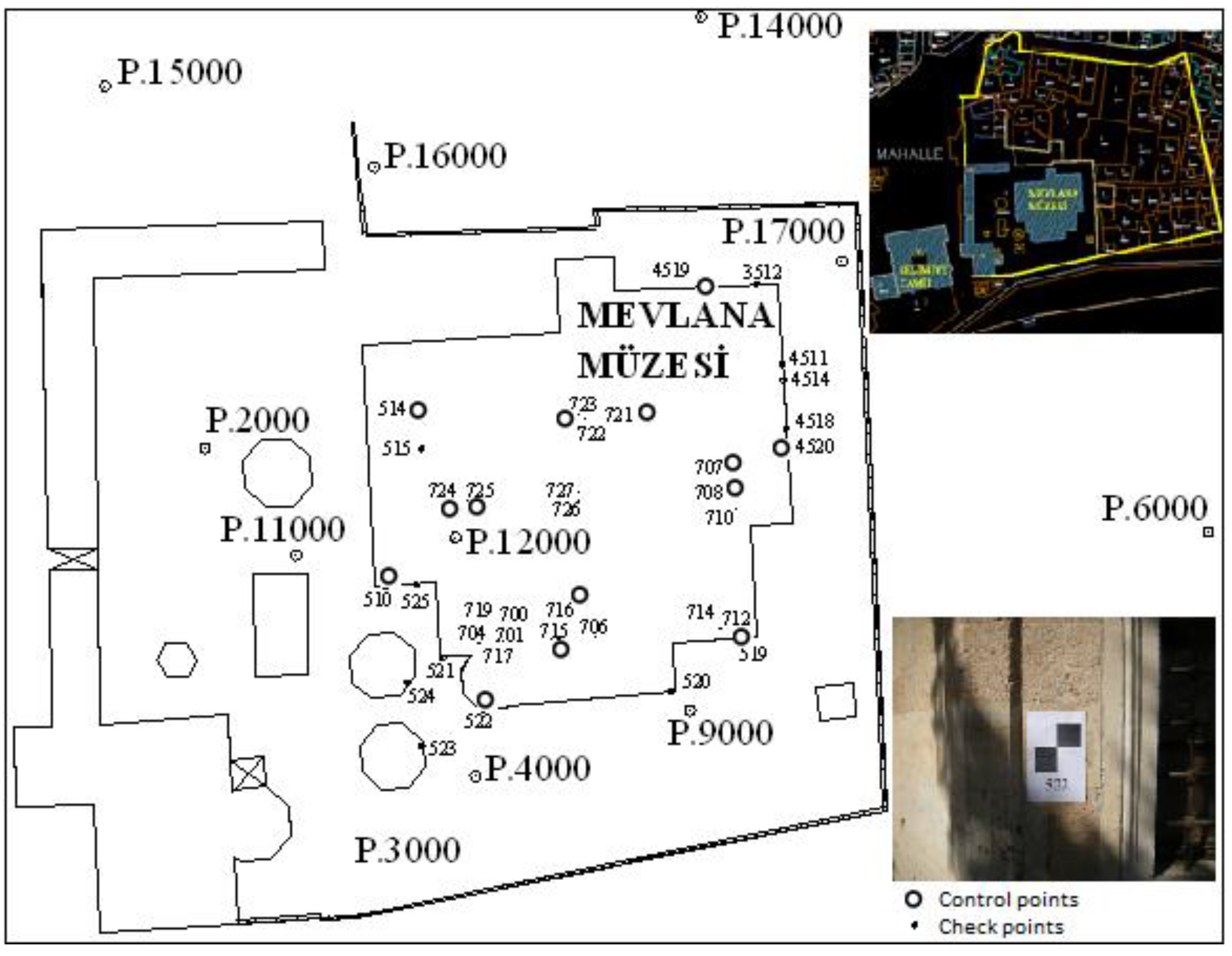
6. Georeferencing and 3D Model Accuracy Evaluation
7. Texture Mapping
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Seker, D.Z.; Alkan, M.; Büyüksalih, G.; Kutoglu, S.H.; Kahya, Y.; Akcin, H. Kültürel Mirasın Kaydı, Analizi, Korunması ve Yaşatılmasına Yönelik Bir Bilgi ve Yönetim Sisteminin Geliştirilmesi, Örnek Uygulama: Safranbolu Tarihi Kenti; The Scientific and Technological Research Council of Turkey (TUBITAK): Ankara, Turkey, 2011. [Google Scholar]
- Gruen, A.; Remondino, F.; Zhang, L. Document photogrammetric reconstruction of the Great Buddha of Bamiyan, Afghanistan. Photogramm. Rec. 2004, 19, 177–199. [Google Scholar] [CrossRef]
- Remondino, F. Heritage recording and 3D modeling with photogrammetry and 3D scanning. Remote Sens. 2011, 3, 1104–1138. [Google Scholar] [CrossRef] [Green Version]
- Remondino, F.; Boehm, J. Editorial: Theme section, terrestrial 3D modeling. ISPRS J. Photogram. Remote Sens. 2013, 76, 31–32. [Google Scholar] [CrossRef]
- Murphy, M.; McGovern, E.; Pavia, S. Historic building information modelling—Adding intelligence to laser and image based surveys of European classical architecture. ISPRS J. Photogram. Remote Sens. 2013, 76, 89–102. [Google Scholar] [CrossRef]
- Oreni, D.; Brumana, R.; Torre, S.D.; Banfi, F.; Barazzetti, L.; Previtali, M. Survey turned into HBIM: The restoration and the work involved concerning the Basilica di Collemaggio after the earthquake (L’Aquila). In Proceedings of the ISPRS Technical Commission V Symposium, Riva del Garda, Italy, 23–25 June 2014; pp. 267–273.
- Scaioni, M.; Vassena, G.; Kludas, T.; Pfeil, J.U. Automatic DEM generation using digital system InduSCAN: An application to the artworks of Milano Cathedral finalized to realize physical marble copies. In Proceedings of the XVIIIth ISPRS Congress, Vienna, Austria, 9–19 July 1996; pp. 581–586.
- Kedzierski, M.; Fryskowska, A. Methods of laser scanning point clouds integration in precise 3D building modelling. Measurement 2015, 74, 221–232. [Google Scholar] [CrossRef]
- Blais, F.; Beraldin, J.A. Recent developments in 3D multi-model laser imaging applied to cultural heritage. Mach. Vis. Appl. 2006, 17, 395–409. [Google Scholar] [CrossRef]
- El-Hakim, S.; Gonzo, L.; Voltolini, F.; Girardi, S.; Rizzi, A.; Remondino, F.; Whiting, E. Detailed 3D modelling of castles. Int. J. Archit. Comput. 2007, 5, 200–220. [Google Scholar] [CrossRef]
- Barazzetti, L.; Binda, L.; Scaioni, M.; Taranto, P. Importance of the geometrical survey for structural analyses and design for intervention on C.H. buildings: Application to a My Son Temple in Vietnam. In Proceedings of the 13th International Conference on Repair, Conservation and Strengthening of Traditionally Erected Buildings and Historic Buildings, Wroclaw, Poland, 2–4 December 2009; pp. 135–146.
- Alsadik, B.; Gerke, M.; Vosselman, G. Automated camera network design for 3D modeling of cultural heritage objects. J. Cult. Hérit. 2013, 14, 515–526. [Google Scholar] [CrossRef]
- Grussenmeyer, P.; Hanke, K. Cultural heritage applications. In Airborne and Terrestrial Laser Scanning; Vosselman, G., Maas, H.-G., Eds.; Whittles Publishing: Caithness, UK, 2010; pp. 271–290. [Google Scholar]
- Akca, D.; Remondino, F.; Novàk, D.; Hanusch, T.; Schrotter, G.; Gruen, A. Recording and modeling of cultural heritage objects with coded structured light projection systems. In Proceedings of the 2nd International Conference on Remote Sensing in Archaeology, Rome, Italy, 4–7 December 2006; pp. 375–382.
- Grussenmeyer, P.; Alby, E.; Assali, P.; Poitevin, V.; Hullo, J.F.; Smiciel, E. Accurate documentation in cultural heritage by merging TLS and high-resolution photogrammetric data. Proc. SPIE 2011. [Google Scholar] [CrossRef]
- Alba, M.; Scaioni, M. Comparison of techniques for terrestrial laser scanning data georeferencing applied to 3-D modelling of cultural heritage. In Proceedings of the 3D-ARCH, Zurich, Switzerland, 12–13 July 2007; pp. 1–8.
- Salvi, J.; Matabosch, C.; Fofi, D.; Forest, J. A review of recent range image registration methods with accuracy evaluation. Image Vis. Comput. 2007, 25, 578–596. [Google Scholar] [CrossRef]
- Aquilera, D.G.; Gonzalvez, P.R.; Lahoz, J.G. An automatic procedure for co-registration of terrestrial laser scanners and digital cameras. ISPRS J. Photogramm. Remote Sens. 2009, 64, 308–316. [Google Scholar]
- Altuntas, C. Pair-wise automatic registration of three-dimensional laser scanning data from historical building by created two-dimensional images. Opt. Eng. 2014, 53, 1–6. [Google Scholar] [CrossRef]
- Haala, N. The landscape of dense image matching algorithms. In Proceedings of the Photogrammetric Week 2013, Stuttgart, Germany, 9–13 September 2013; pp. 271–284.
- Barazzetti, L.; Scaioni, M.; Remondino, F. Orientation and 3D modelling from markerless terrestrial images: Combining accuracy with automation. Photogramm. Rec. 2010, 25, 356–381. [Google Scholar] [CrossRef]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Remondino, F.; Stoppa, D. ToF Range-Imaging Cameras; Springer: Berlin, Germany, 2013. [Google Scholar]
- Rinaudo, F.; Chiabrando, F.; Nex, F.; Piatti, D. New instruments and technologies for cultural heritage survey: Full integration between point clouds and digital photogrammetry. In Digital Heritage; Ioannides, M., Ed.; Springer: Berlin, Germany, 2010; pp. 56–70. [Google Scholar]
- Chiabro, F.; Rinaudo, F. ToF cameras for architectural surveys. In TOF Range-Imaging Cameras; Remondino, F., Stoppa, D., Eds.; Springer: Berlin, Germany, 2013; pp. 139–164. [Google Scholar]
- Rinaudo, F.; Chiabrando, F. Calibrating and evaluating a range camera for cultural heritage metric survey. In Proceedings of the XXIV International CIPA Symposium, Strasbourg, France, 2–6 September 2013; pp. 271–276.
- Republic of Turkey Ministry of Culture and Tourism. Available online: http://www.kulturvarliklari.gov.tr/TR,43870/konya---mevlana-muzesi.html (accessed on 3 December 2012).
- GEO3D Optech Ilris-3D Specifications. Available online: http://www.geo3d.hr/download/ilris_3d/brochures/ilris_36d.pdf (accessed on 10 January 2013).
- Vosselman, G.; Maas, H.G. Airborn and Terrestrial Laser Scanning; Whittles Publishing: Caithness, UK, 2010. [Google Scholar]
- Clark, J.; Robson, S. Accuracy of measurements made with a Cyrax 2500 laser scanner. Surv. Rev. 2004, 37, 626–638. [Google Scholar] [CrossRef]
- Vezočnik, R.; Ambrožič, T.; Sterle, O.; Bilban, G.; Pfeifer, N.; Stopar, B. Use of terrestrial laser scanning technology for long term high precision deformation monitoring. Sensors 2009, 9, 9873–9895. [Google Scholar] [CrossRef] [PubMed]
- Gikas, V. 3D terrestrial laser scanning for geometry documentation and construction management of highway tunnels during excavation. Sensors 2012, 12, 11249–11270. [Google Scholar]
- Hussmann, S.; Ringbeck, T.; Hagebeuker, B. A Performance review of 3D ToF vision systems in comparison to stereo vision systems. In Stereo Vision; Bhatti, A., Ed.; InTech: Rijeka, Croatia, 2008; pp. 103–120. [Google Scholar]
- Piatti, D.; Rinaudo, F. SR-4000 and CamCube 3.0 Time of Flight (ToF) cameras: Tests and comparison. Remote Sens. 2012, 4, 1069–1089. [Google Scholar]
- MesaImaging, SwissRanger SRSR4000 Overview. Available online: http://www.mesa-imaging.ch/products/sr4000/ (accessed on 9 March 2015).
- Piatti, D. Time-of-Flight Cameras: Tests, Calibration and Multi Frame Registration for Automatic 3D Object Reconstruction. Ph.D. Thesis, Politecnico di Torino, Torino, Italy, 2010. [Google Scholar]
- Lichti, D.D.; Qi, X.; Ahmed, T. Range camera self-calibration with scattering compensation. ISPRS J. Photogramm. Remote Sens. 2012, 74, 101–109. [Google Scholar] [CrossRef]
- Valverdea, S.A.; Castilloa, J.C.; Caballeroa, A.F. Mobile robot map building from time-of-fight camera. Expert Syst. Appl. 2012, 39, 8835–8843. [Google Scholar] [CrossRef]
- Oggier, T.; Büttgen, B.; Lustenberger, F.; Becker, G.; Rüegg, B.; Hodac, A. SwissRanger SR3000 and first experiences based on miniaturized 3D-ToF cameras. In Proceedings of the 1st Range Imaging Research Day, Zurich, Switzerland, 8–9 September 2005; pp. 97–108.
- Boehm, J.; Pattinson, T. Accuracy of exterior orientation for a range camera. In Proceedings of the ISPRS Commission V Mid-Term Symposium, Newcastle upon Tyne, UK, 21–24 June 2010; pp. 103–108.
- Cui, Y.; Schuan, S.; Chan, D.; Thrun, S.; Theobalt, C. 3D shape scanning with a time-of-flight camera. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 1173–1180.
- Altuntas, C.; Yildiz, F. The registration of point cloud data from range imaging camera. Géod. Cartogr. 2013, 39, 106–112. [Google Scholar] [CrossRef]
- Lichti, D.D.; Jamtsho, S.; El-Halawany, S.I.; Lahamy, H.; Chow, J.; Chan, T.O.; El-Badry, M. Structural deflection measurement with a range camera. ASCE J. Surv. Eng. 2012, 138, 66–76. [Google Scholar] [CrossRef]
- Qi, X.; Lichti, D.D.; El-Badry, M.; Chan, T.O.; El-Halawany, S.I.; Lahamy, H.; Steward, J. Structural dynamic deflection measurement with range cameras. Photogramm. Rec. 2014, 29, 89–107. [Google Scholar] [CrossRef]
- Ganapathi, V.; Plagemann, C.; Koller, D.; Thrun, S. Real time motion capture using a single time-of-flight camera. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 755–762.
- Clemente, L.A.; Davison, A.J.; Reid, I.D.; Neira, J.; Tardos, J.D. Mapping large loops with a single hand-held camera. In Proceedings of the Robotics: Science and Systems, Atlanta, GA, USA, 27–30 June 2007.
- Previtali, M.; Barazzetti, L.; Scaioni, M. An automated and accurate procedure for texture mapping from images. In Proceedings of the 18th International Conference on Virtual Systems and Multimedia (VSMM), Milan, Italy, 2–5 September 2012; pp. 591–594.
- Luhmann, T.; Robson, S.; Kyle, S.; Böhm, J. Close Range Photogrammetry: 3D Imaging Techniques; Walter De Gruyter: Berlin, Germany, 2013; p. 702. [Google Scholar]
- Yu, Y.; Debevec, P.; Malik, J.; Hawkins, T. Inverse global illumination: Recovering reflectance models of real scenes from photographs. In Proceedings of the 26th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 8–13 August 1999; pp. 215–227.
- Yang, H.; Welch, G.; Pollefeys, M. Illumination intensive model-based 3D object tracking and texture refinement. In Proceedings of the 3rd International Symposium on 3D Data Processing, Visualization, and Transmission (3DPVT’06), Chapel Hill, NC, USA, 14–16 June 2006; pp. 869–876.
- PolyWorks Software, version 9.0, InnovMetric Software Inc.: Ville de Québec, QC, Canada, 2007.
- Pomerleau, F.; Colas, F.; Siegwart, R.; Magnenat, S. Comparing ICP variants on real-world data sets. Auton. Robot. 2013, 34, 133–148. [Google Scholar] [CrossRef]
- Schofield, W.; Breach, M. Engineering Surveying, 6th ed.; Butterworth-Heinemann: Oxford, UK, 2007. [Google Scholar]
- Yastikli, N. Documentation of cultural heritage using digital photogrammetry and laser scanning. J. Cult. Hérit. 2007, 8, 423–427. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point Cloud | Control Points # | Check Points # | Average Residuals (m) | Std.Dev.of Residuals (m) | ||||
|---|---|---|---|---|---|---|---|---|
| dx | dy | dz | σx | σy | σz | |||
| Outside | 6 | 10 | 0.005 | −0.002 | −0.004 | 0.022 | 0.013 | 0.007 |
| Inside | 9 | 11 | 0.014 | −0.004 | 0.007 | 0.020 | 0.026 | 0.026 |
| Control/Check Point Line | ITRF-2005 Distance (m) | TLS Distance (m) | Discrepancy (m) | df (m) |
|---|---|---|---|---|
| 522–525 | 13.716 | 13.705 | −0.011 | 0.023 |
| 525–510 | 3.066 | 3.052 | −0.014 | |
| 510–521 | 8.880 | 8.902 | 0.021 | |
| 521–524 | 4.207 | 4.218 | 0.011 | |
| 524–523 | 6.314 | 6.278 | −0.035 | |
| 523–520 | 24.658 | 24.654 | −0.004 | |
| 520–519 | 9.157 | 9.167 | 0.010 | |
| 519–514 | 38.744 | 38.714 | −0.030 | |
| 514–515 | 3.566 | 3.541 | −0.024 | |
| 515–4519 | 34.237 | 34.255 | 0.018 | |
| 4519–3512 | 2.535 | 2.565 | 0.030 | |
| 3512–4514 | 9.661 | 9.647 | −0.014 | |
| 4514–4511 | 1.611 | 1.573 | −0.038 | |
| 4511–4520 | 8.293 | 8.332 | 0.038 | |
| 4520–4518 | 1.974 | 1.965 | −0.008 |
| Control/Check Point Line | ITRF-2005 Distance (m) | TLS Distance (m) | Discrepancy (m) | df (m) |
|---|---|---|---|---|
| 707–708 | 1.277 | 1.295 | −0.018 | 0.024 |
| 708–722 | 15.951 | 15.982 | −0.030 | |
| 722–723 | 1.161 | 1.148 | 0.013 | |
| 723–721 | 3.089 | 3.054 | 0.035 | |
| 721–715 | 21.408 | 21.425 | −0.017 | |
| 715–716 | 2.440 | 2.445 | −0.004 | |
| 716–724 | 17.087 | 17.060 | 0.027 | |
| 724–725 | 1.252 | 1.222 | 0.030 | |
| 725–706 | 18.098 | 18.106 | −0.008 | |
| 706–726 | 13.440 | 13.411 | 0.029 | |
| 726–727 | 0.680 | 0.694 | −0.015 | |
| 727–710 | 15.200 | 15.169 | 0.031 | |
| 710–700 | 25.912 | 25.912 | 0.001 | |
| 700–701 | 1.296 | 1.316 | −0.020 | |
| 701–704 | 2.328 | 2.365 | −0.037 | |
| 704–717 | 5.136 | 5.117 | 0.019 | |
| 717–719 | 3.217 | 3.249 | −0.032 | |
| 719–712 | 23.744 | 23.754 | −0.010 | |
| 712–714 | 2.559 | 2.594 | −0.035 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Altuntas, C.; Yildiz, F.; Scaioni, M. Laser Scanning and Data Integration for Three-Dimensional Digital Recording of Complex Historical Structures: The Case of Mevlana Museum. ISPRS Int. J. Geo-Inf. 2016, 5, 18. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5020018
Altuntas C, Yildiz F, Scaioni M. Laser Scanning and Data Integration for Three-Dimensional Digital Recording of Complex Historical Structures: The Case of Mevlana Museum. ISPRS International Journal of Geo-Information. 2016; 5(2):18. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5020018
Chicago/Turabian StyleAltuntas, Cihan, Ferruh Yildiz, and Marco Scaioni. 2016. "Laser Scanning and Data Integration for Three-Dimensional Digital Recording of Complex Historical Structures: The Case of Mevlana Museum" ISPRS International Journal of Geo-Information 5, no. 2: 18. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5020018