
Coastline Zones Identification and 3D Coastal Mapping Using UAV Spatial Data




Abstract
:1. Introduction
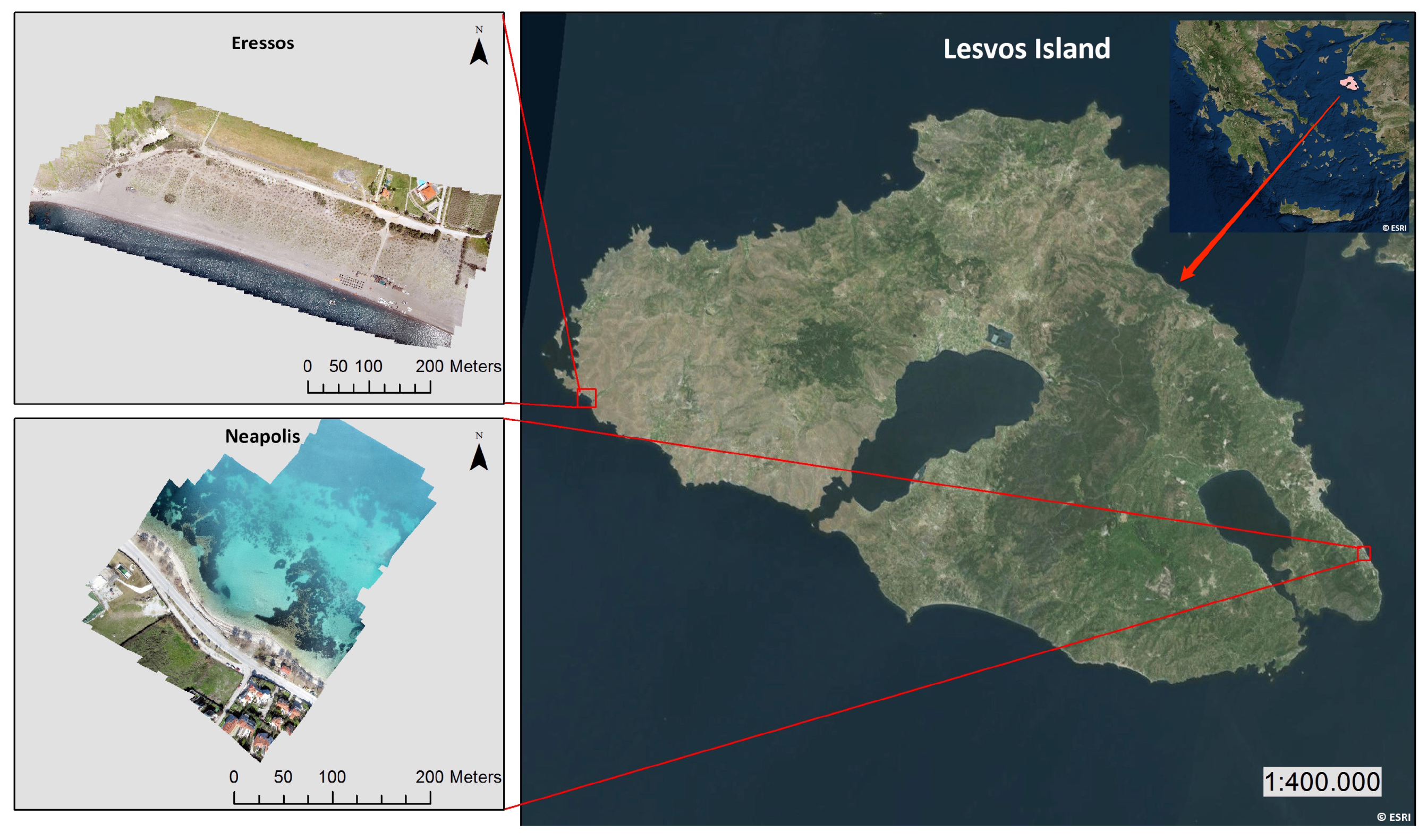
2. Materials and Methods
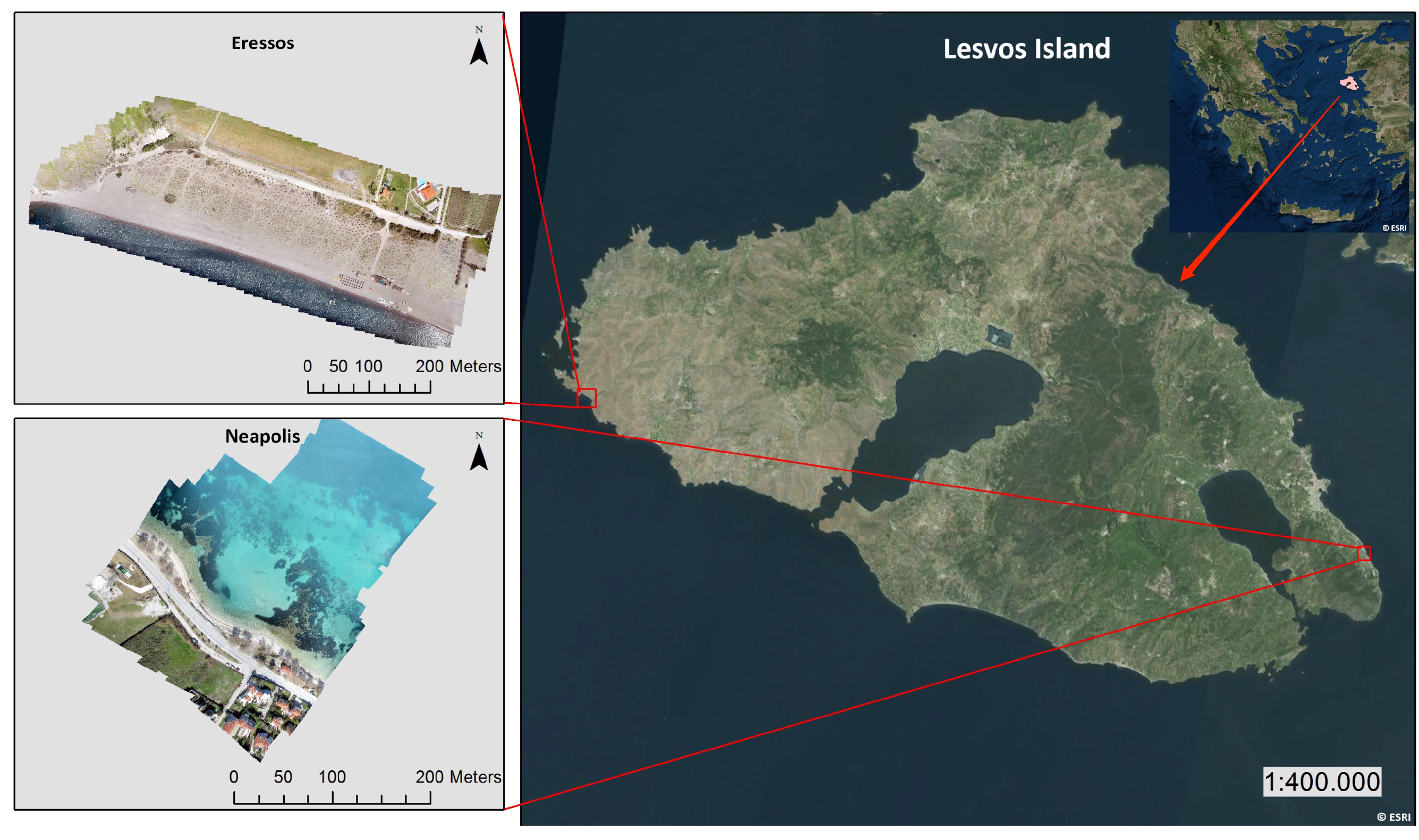
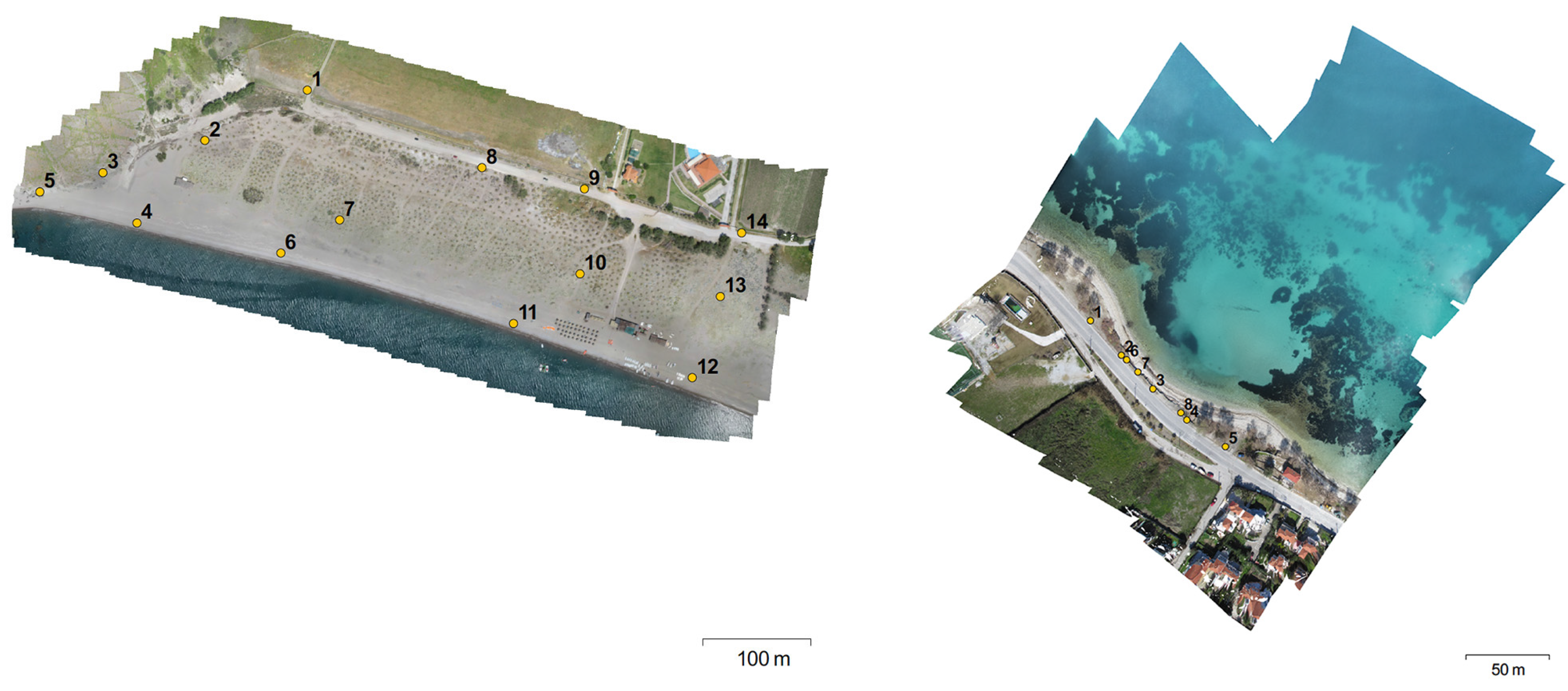
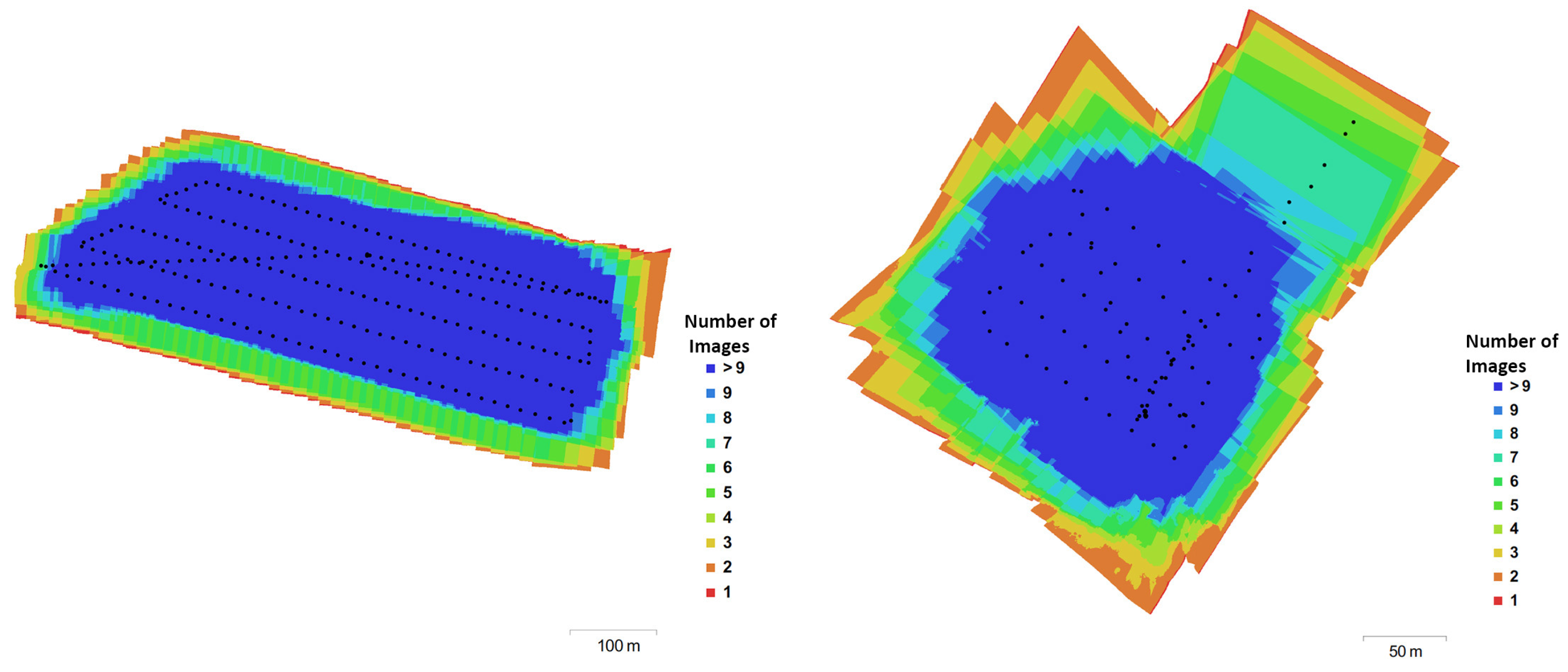
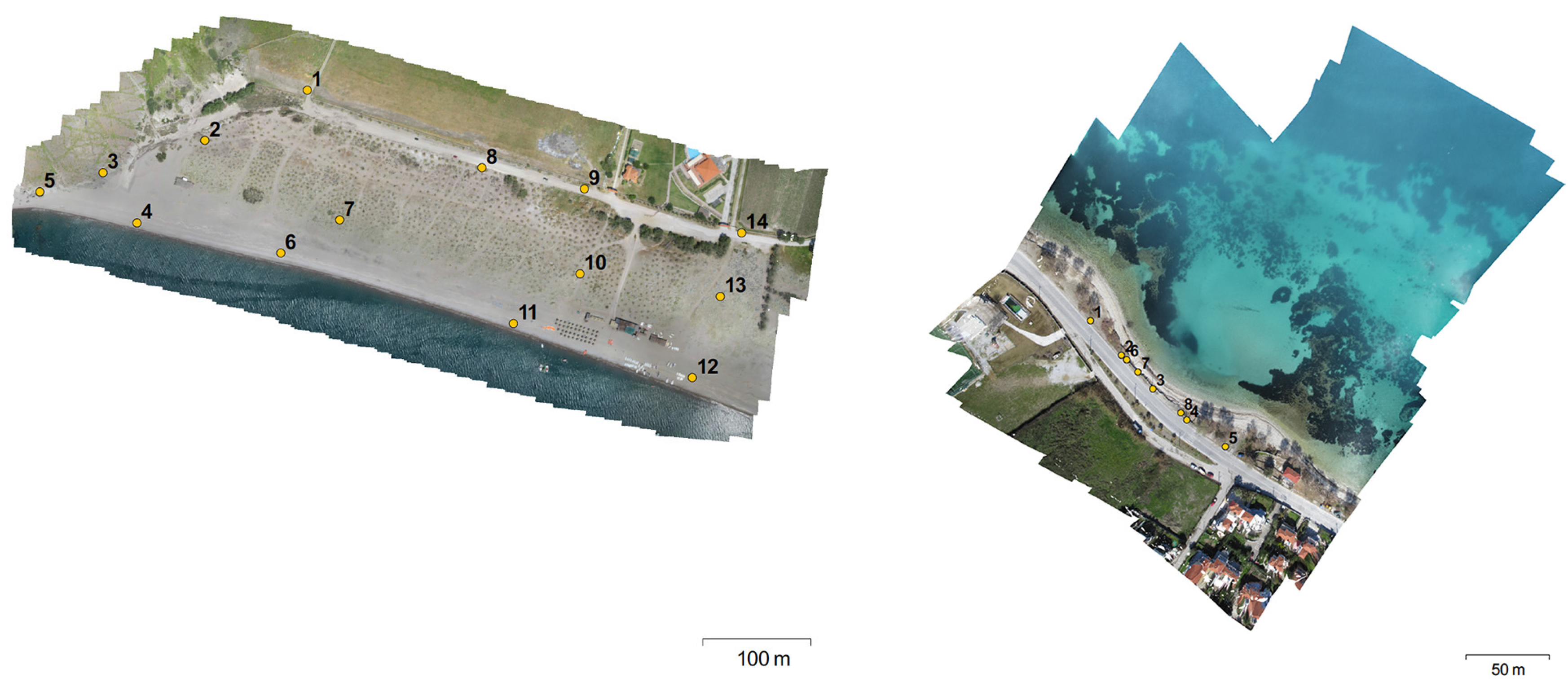
2.1. UAV System Data Collection
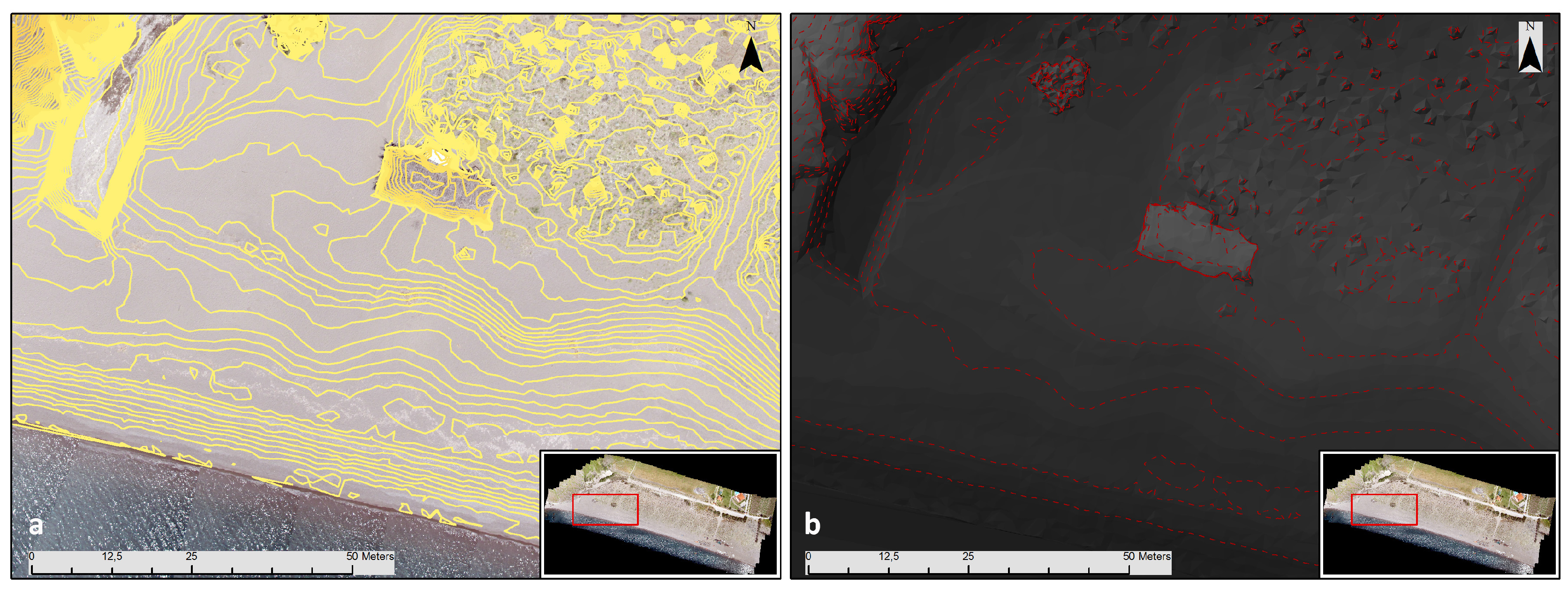
2.2. 3D Visualization and Orthophoto Map Production
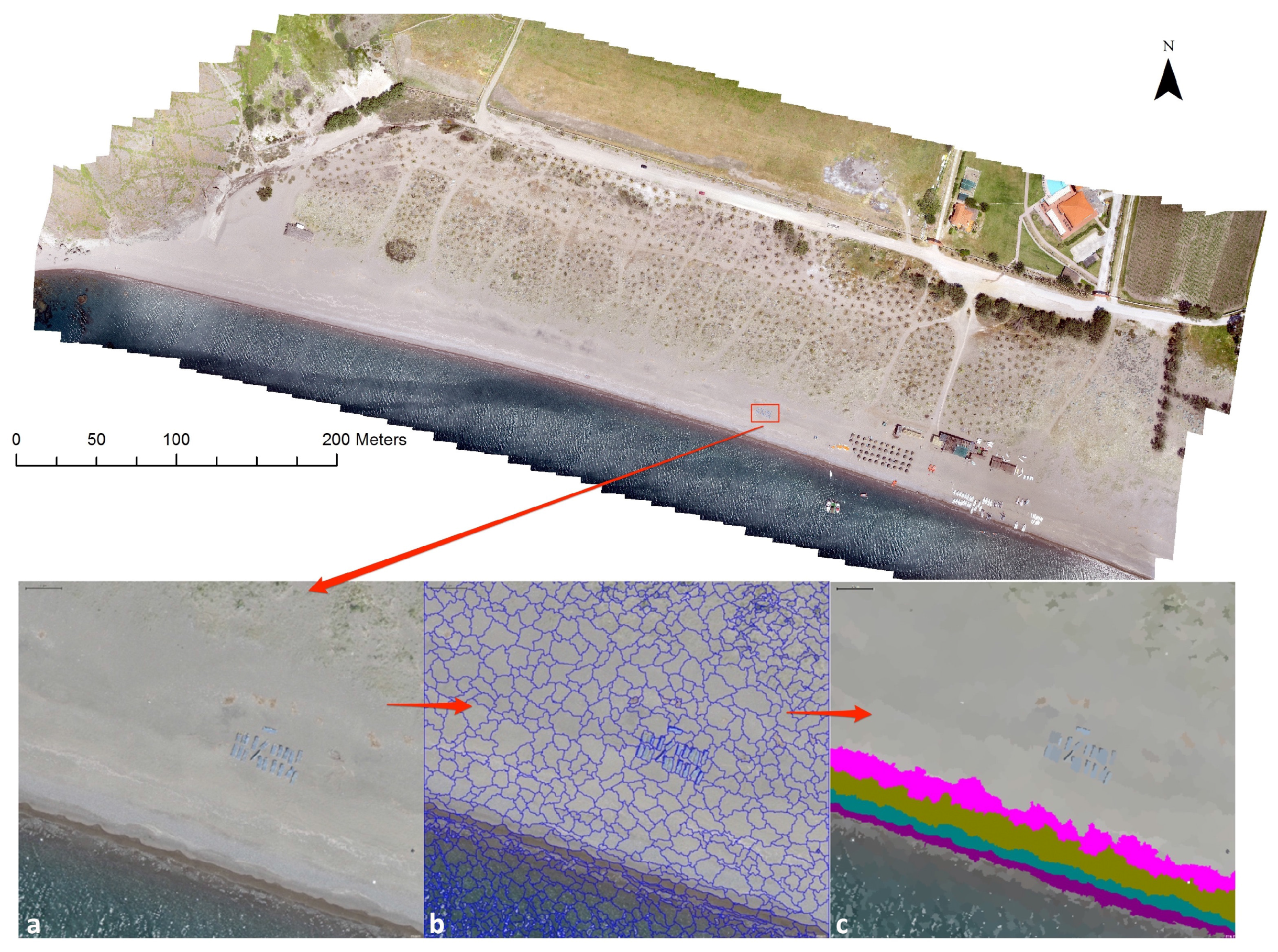
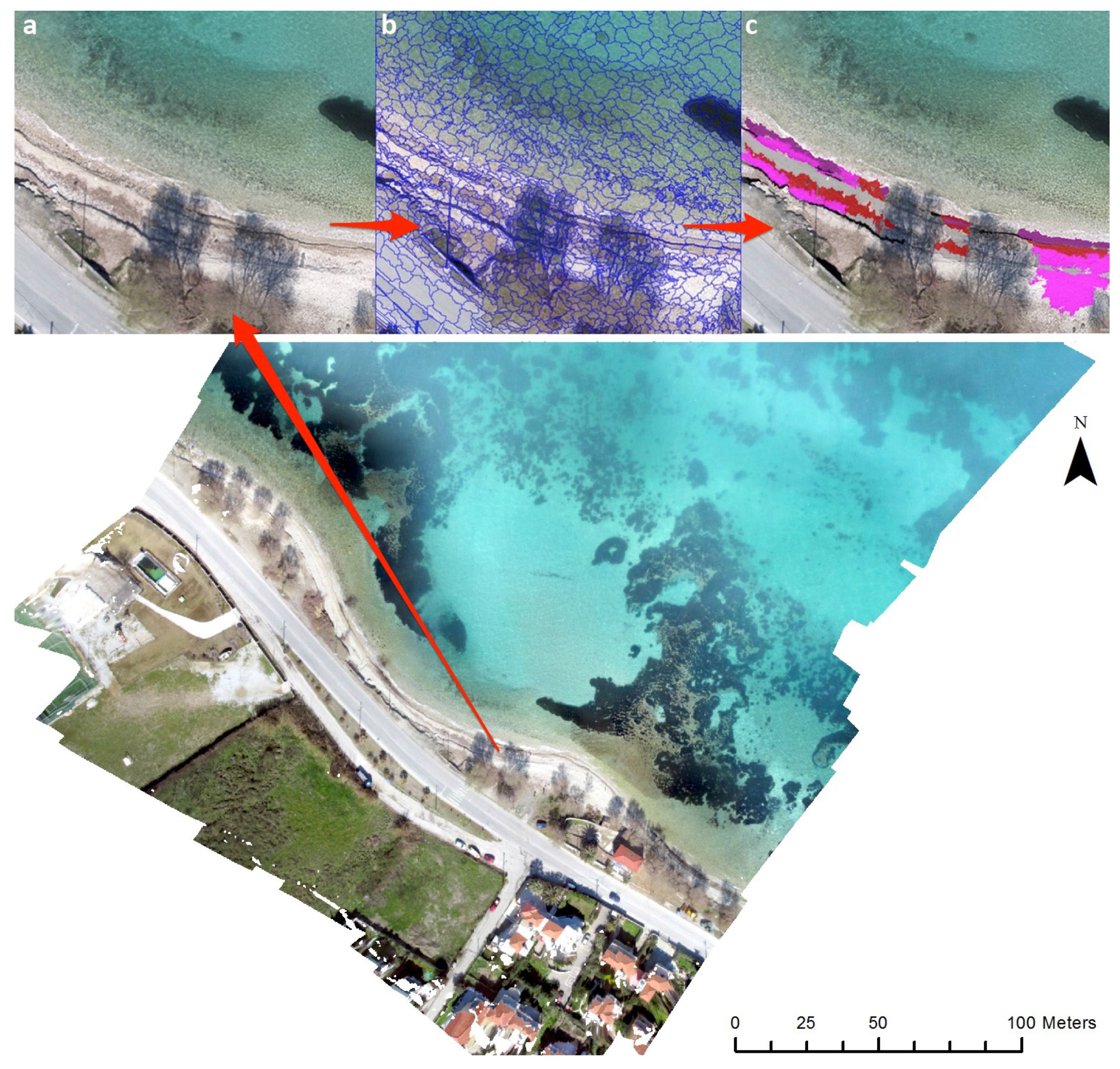
2.3. GEOBIA - Coastline Detection
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kolednik, D. Coastal monitoring for change detection using multi-temporal LiDAR data. In Proceedings of the CESCG 2014: The 18th Central European Seminar on Computer Graphics, Smolenice, Slovakia, 25–27 May 2014; pp. 73–78.
- Pajares, G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef]
- Yastikli, N.; Bagci, I.; Beser, C. The processing of image data collected by light UAV systems for GIS data capture and updating. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-7/W2, 267–270. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2015, 260, 4–15. [Google Scholar] [CrossRef]
- Brunier, G.; Fleury, J.; Anthony, E.J.; Gardel, A.; Dussouillez, P. Close-range airborne structure-from-motion photogrammetry for high-resolution beach morphometric surveys: Examples from an embayed rotating beach. Geomorphology 2016, 261, 76–88. [Google Scholar] [CrossRef]
- Casella, E.; Rovere, A.; Pedroncini, A.; Mucerino, L.; Casella, M.; Cusati, L.A.; Vacchi, M.; Ferrari, M.; Firpo, M. Study of wave runup using numerical models and low-altitude aerial photogrammetry: A tool for coastal management. Estuar. Coast. Shelf Sci. 2014, 149, 160–167. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Solbo, S.; Storvold, R. Mapping svalbard glaciers with the cryowing UAS. Int. Arch. Photogramm. Remote Sens. 2013, XL, 4–6. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Dietrich, J.T. Riverscape mapping with helicopter-based structure-from-motion photogrammetry. Geomorphology 2016, 252, 144–157. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned aerial vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef]
- Klemas, V.V. Coastal and environmental remote sensing from unmanned aerial vehicles: An overview. J. Coast. Res. 2015, 315, 1260–1267. [Google Scholar] [CrossRef]
- Lechner, A.; Fletcher, A.; Johansen, K.; Erskine, P. Characterising upland swamps using object-based classification methods and hyper-spatial resolution imagery derived from an unmanned aerial vehicle. Proc. XXII ISPRS Congr. Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 4, 101–106. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery, based on Structure from Motion (SFM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Topouzelis, K.; Kitsiou, D. Detection and classification of mesoscale atmospheric phenomena above sea in SAR imagery. Remote Sens. Environ. 2015, 160, 263–272. [Google Scholar] [CrossRef]
- Verhoeven, G.; Taelman, D.; Vermeulen, F. Computer vision-based orthophoto mapping of complex archaeological sites: The ancient quarry Of Pitaranha (Portugal-Spain). Archaeometry 2012, 54, 1114–1129. [Google Scholar] [CrossRef]
- Topouzelis, K.; Papakonstantinou, A.; Pavlogeorgatos, G. Coastline change detection using UAV , Remote Sensing , GIS and 3D reconstruction. In Proceedings of the 5th International Conference on Environmental Management, Engineering, Planning and Economics (CEMEPE) and SECOTOX Conference, Mykonos Island, Greece, 14–18 June 2015.
- Furukawa, Y.; Ponce, J. Accurate camera calibration from multi-view stereo and bundle adjustment. Int. J. Comput. Vis. 2009, 84, 257–268. [Google Scholar] [CrossRef]
- Wu, C. Towards linear-time incremental structure from motion. In Proceedings of the 2013 International Conference on 3D Vision, Seattle, WA, USA, 29 June–1 July 2013; pp. 127–134.
- Klingner, B.; Martin, D.; Roseborough, J. Street view motion-from-structure-from-motion. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 953–960.
- Hay, G.J.; Castilla, G. Geographic object-based image analysis (GEOBIA): A new name for a new discipline. In Lecture Notes in Geoinformation and Cartography; Blaschke, T., Lang, S., Hay, G.J., Eds.; Springer: Berlin, Germany, 2008; pp. 75–89. [Google Scholar]
- Urbanski, J.A. The extraction of coastline using OBIA and GIS. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 46, 378. [Google Scholar]
- Mathews, A.J.; Jensen, J.L.R. Visualizing and quantifying vineyard canopy LAI using an unmanned aerial vehicle (UAV) collected high density structure from motion point cloud. Remote Sens. 2013, 5, 2164–2183. [Google Scholar] [CrossRef]
- Giannini, M.B.; Parente, C. An object based approach for coastline extraction from Quickbird multispectral images. Int. J. Eng. Technol. 2015, 6, 2698–2704. [Google Scholar]
- Alesheikh, A.; Ghorbanali, A.; Nouri, N. Coastline change detection using remote sensing. Int. J. Environ. Sci. Technol. 2007, 4, 61–66. [Google Scholar] [CrossRef]
- DIY Drones. Available online: http://diydrones.com/ (accessed on 11 February 2016).
- Agisoft Photonscan. Available online: http://www.agisoft.com/ (accessed on 11 February 2016).
- Dellaert, F.; Seitz, S.; Thorpe, C.; Thrun, S. Structure from motion without correspondence. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hilton Head Island, SC, USA, 13–15 June 2000.
- Topouzelis, K.; Karathanassi, V.; Pavlakis, P.; Rokos, D. Detection and discrimination between oil spills and look-alike phenomena through neural networks. ISPRS J. Photogramm. Remote Sens. 2007, 62, 264–270. [Google Scholar] [CrossRef]
- Karathanassi, V.; Topouzelis, K.; Pavlakis, P.; Rokos, D. An object–oriented methodology to detect oil spills. Int. J. Remote Sens. 2006, 27, 5235–5251. [Google Scholar] [CrossRef]
- eCognition|Trimble. Available online: http://www.ecognition.com/ (accessed on 11 February 2016).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| X Error | Y Error (m) | Z Error (m) | RSSE (m) | |
|---|---|---|---|---|
| 1 | −0.013946 | −0.027066 | +0.011029 | +0.032384 |
| 2 | −0.014527 | −0.064581 | +0.041894 | +0.078337 |
| 3 | −0.010834 | +0.031295 | +0.006176 | +0.033688 |
| 4 | +0.000407 | +0.01248 | −0.047335 | +0.048955 |
| 5 | −0.013913 | +0.003161 | +0.003906 | +0.014793 |
| 6 | +0.022724 | +0.041989 | −0.004675 | +0.047972 |
| 7 | +0.02499 | −0.022705 | +0.006861 | +0.034454 |
| 8 | +0.038457 | +0.072 | −0.05524 | +0.098561 |
| 9 | +0.029293 | −0.006734 | −0.003382 | +0.030247 |
| 10 | −0.03736 | −0.037101 | +0.055222 | +0.076301 |
| 11 | +0.00587 | −0.006312 | +0.001308 | +0.008719 |
| 12 | +0.026839 | −0.010243 | −0.016675 | +0.033216 |
| 13 | −0.016053 | −0.028462 | +0.029556 | +0.044061 |
| 14 | −0.041859 | +0.042076 | −0.029186 | +0.066139 |
| X Error (m) | Y Error (m) | Z Error (m) | RSSE (m) | |
|---|---|---|---|---|
| 1 | −0.084526 | −0.005193 | +0.032905 | +0.090853 |
| 2 | −0.007139 | +0.049133 | −0.039916 | +0.063705 |
| 3 | −0.156592 | +0.05385 | +0.015161 | +0.166285 |
| 4 | −0.101613 | +0.012272 | +0.019812 | +0.104251 |
| 5 | −0.012858 | +0.030812 | −0.011053 | +0.035169 |
| 6 | +0.141038 | −0.043869 | +0.016315 | +0.148602 |
| 7 | +0.079281 | −0.009084 | −0.04635 | +0.092284 |
| 8 | +0.139628 | −0.091736 | +0.016157 | +0.167847 |
| Fligh | Ortho GSD | DSM Resolution | X RMSE | Y RMSE | Z RMSE | RSS | RMSE |
|---|---|---|---|---|---|---|---|
| (cm/pix) | (cm/pix) | (m) | (m) | (m) | (m) | (pixels) | |
| Eressos | 2.34 | 4.68 | 0.0408 | 0.0389 | 0.00404 | 0.0565 | 0.187 |
| Neapolis | 2.41 | 4.15 | 0.1048 | 0.0459 | 0.0276 | 0.0117 | 0.585 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papakonstantinou, A.; Topouzelis, K.; Pavlogeorgatos, G. Coastline Zones Identification and 3D Coastal Mapping Using UAV Spatial Data. ISPRS Int. J. Geo-Inf. 2016, 5, 75. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5060075
Papakonstantinou A, Topouzelis K, Pavlogeorgatos G. Coastline Zones Identification and 3D Coastal Mapping Using UAV Spatial Data. ISPRS International Journal of Geo-Information. 2016; 5(6):75. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5060075
Chicago/Turabian StylePapakonstantinou, Apostolos, Konstantinos Topouzelis, and Gerasimos Pavlogeorgatos. 2016. "Coastline Zones Identification and 3D Coastal Mapping Using UAV Spatial Data" ISPRS International Journal of Geo-Information 5, no. 6: 75. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5060075