
A Cloud Computing-Enabled Spatio-Temporal Cyber-Physical Information Infrastructure for Efficient Soil Moisture Monitoring


Abstract
:
1. Introduction
1.1. Sensor Web and Soil Moisture (SM) Monitoring in Precision Agriculture
1.2. Existing Precision Agriculture (PA) Geospatial Cyber-Physical Information, Infrastructure, and Problems
1.3. Contribution and Organization
2. Cloud Computing-Enabled Spatio-Temporal Cyber-Physical Infrastructure (CESCI)
2.1. CESCI Framework
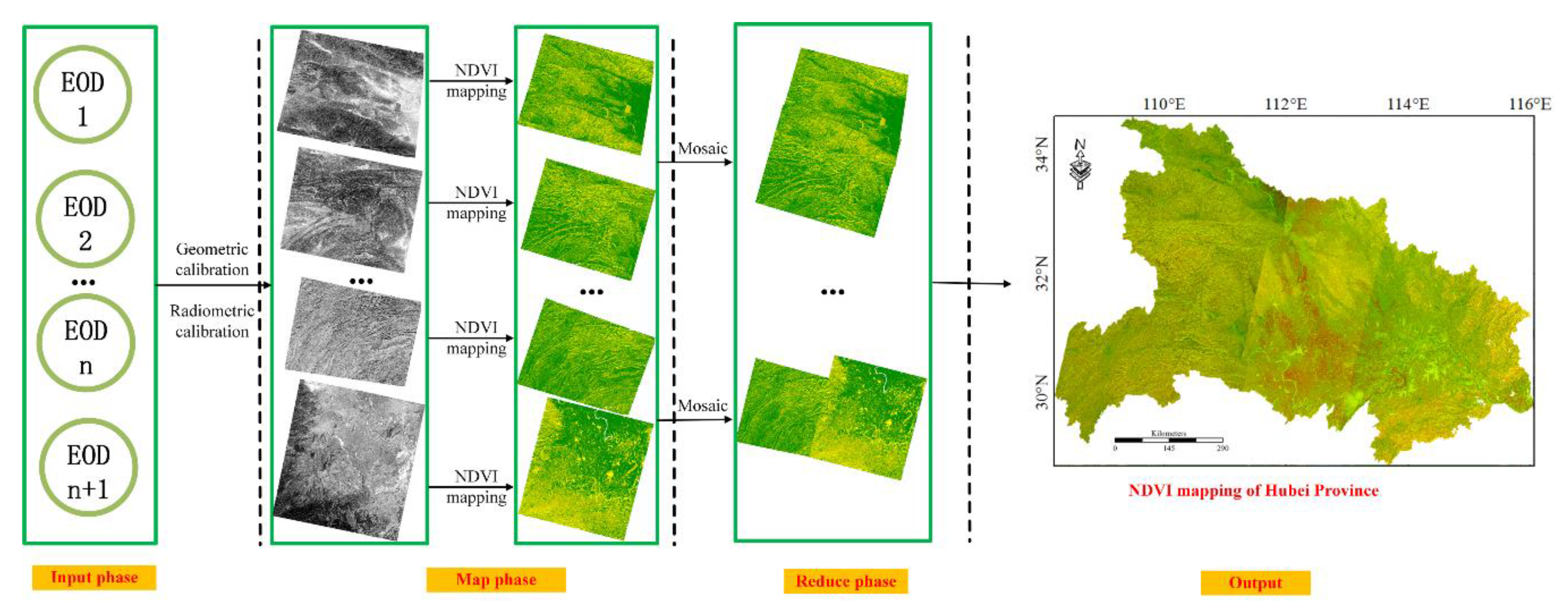
2.2. Kernel Map/Reduce Algorithm for Remote Sensing Imagery Mapping
| Algorithm 1: Flow of the map/reduce algorithm for mapping EOD |
Input: current EOD observation EODtn Output: Insertion result ExecuteOutput indicated by JobStatus Use: WebProcessingService(DatatnInput, AlgorithmIDEOD, ResponseFormat) inherits the data access object for WPS implementation doConfiguration(PathHDFS, IPHadoop, URLSOS) configures PathHDFS and IPHadoop setMap(EODtn, fSM) sets the map function in the map/reduce process setReduce(STtn, fMosaic) sets the distributed database parameters setOutput(InsertionOutput) sets the InsertionOutput status information of the result STEP 1: Inherit the mandatory interface of WPSEOD implementation using the function WebProcessingService(DatatnInput, AlgorithmIDEOD, ResponseFormat), i.e., implement the necessary function embedded in the InsertObservation interface. WPSEOD represents the OGC standard web service that is used to process EOD and generate EOD mapping. STEP 2: Start configuring the parameters of the input path of the Hadoop Distributed File System (HDFS)’s Internet Protocol (IP) address for entry into the Hadoop cluster environment. Create a new job, utilizing the parameters such as IP and port number configured above. HDFS represents the storage layer in the file system. STEP 3: Obtain the set of objects STtn from EODtn using the get4(EODtn) function. The implementation of the get4(EODtn) function is based on the Observation & Measurement encoding model with the help of SOSEOD. SOSEOD represents the OGC standard web service used to access EOD. STEP 4: Implement the map setMap(EODtn, fSM) function, achieving EODtn SM mapping via the fSM function. The decomposition algorithm fSM is called here. After data preprocessing, including geometry correction and radiation correction, EODtn can be mapped via the SM computation model. The specified SM computation model is referenced here. By invoking the application program interface (API) of ArcGIS and the Environment for Visualizing Images (ENVI) tools, SM mapping can be accomplished. ArcGIS and ENVI contain the specific API needed to process the EOD and obtain the SM mapping result. STEP 5: Combine the regional and partial SM maps into a large-scale SM map via the ENVI IDL interface using the setReduce(STtn, fMosaic) function. The fMosaic function refers to the image mosaicking process. The InsertionOutput status information indicated by JobStatus is generated last using the setOutput(InsertionOutput) function. Furthermore, the statistical result will be inserted into the MongoDB database via the SOS data insertion interface and the SOS web address. |
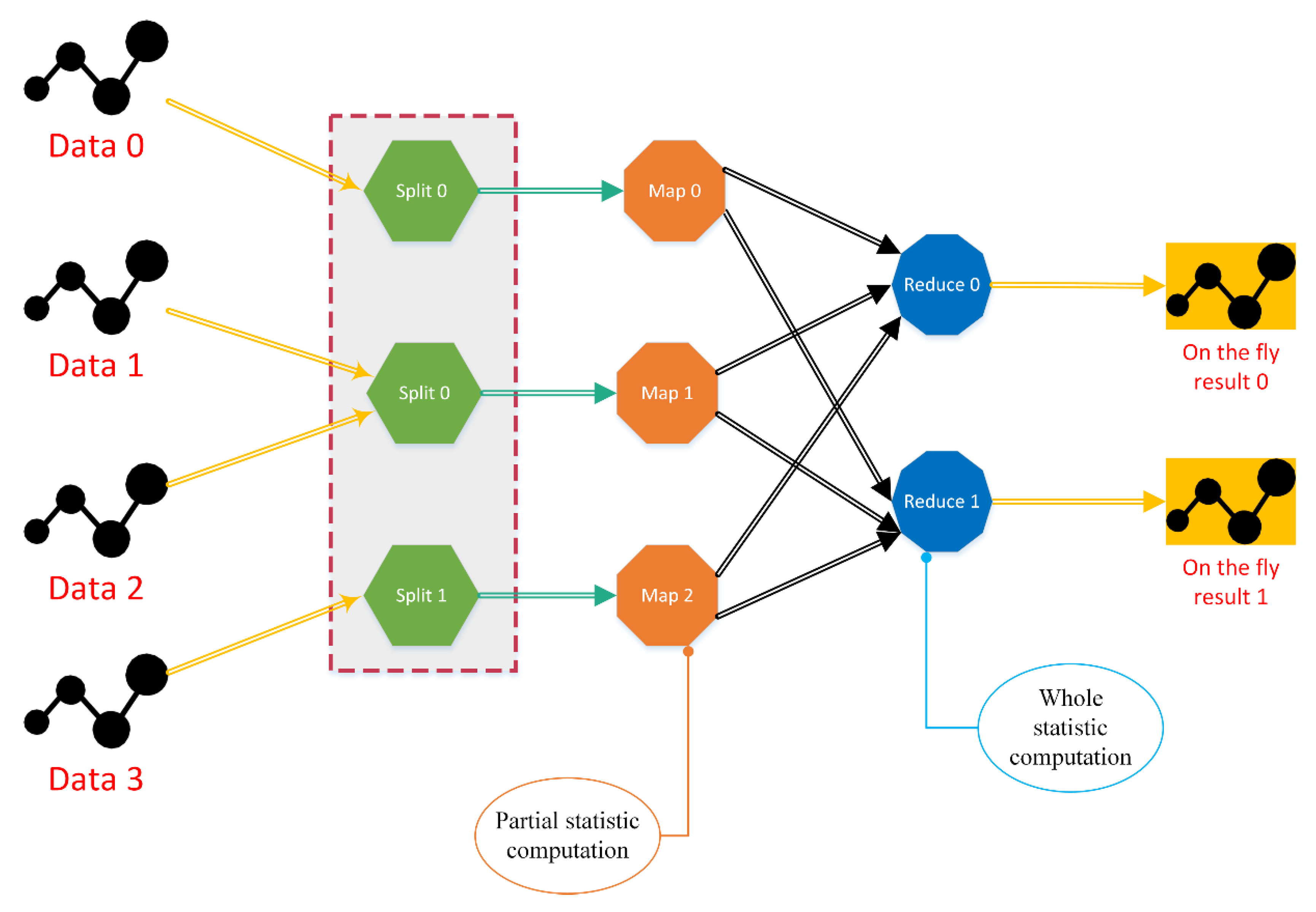
2.3. Kernel Map/Reduce Algorithm for in Situ Sensors
| Algorithm 2. Flow of the map/reduce algorithm for an in situ sensor-based statistical analysis |
Input: Current in situ sensor observation In-situObservationtn Output: Insertion result ExecuteOutput indicated by JobStatus Use: WebProcessingService(DatatnInput, AlgorithmIDin-situ, ResponseForm) inherits the data access object for WPS implementation doConfiguration(PathHDFS, IPHadoop, URLSOS) configures PathHDFS and IPHadoop setMap(In-situObservationtn, fpartial-statistic) sets the map function in the map/reduce process setReduce(statistictn, foverall-statistic) sets the distributed database parameters setOutput(InsertionOutput) sets the InsertionOutput status information of the result STEP 1: Inherit the mandatory interface of WPSin-situ implementation using the function WebProcessingService(DatatnInput, AlgorithmIDin-situ, ResponseForm), which involves implementing the necessary function embedded in the InsertObservation interface. WPSin-situ represents the OGC standard web service used to process the in situ sensor observations. STEP 2: Start configuring the parameters of the input path of the HDFS’ Internet Protocol address for entry into the Hadoop cluster environment. Create a new job, utilizing parameters such as IP and port number, as configured above. STEP 3: Insert the in situ sensor observation sets into the SOS address automatically via the data insertion interface of the SOS. The observation sets are encoded with the Observation & Measurement encoding model. The in situ sensor observations can be inserted into the MongoDB in this step. The SOS represents the OGC standard web service used to access the in situ sensor observations. STEP 4: Obtain the set of objects STtn from EODtn using the get4(In-situObservationtn) function with the help of SOS. The get4(In-situObservationtn) function is implemented based on the Observation & Measurement encoding model. The spatial and temporal ranges can be specifically set in the following steps. STEP 5: Implement the map function setMap(In-situObservationtn, fpartial-statistic), yielding the In-situObservationtn statistic via the fpartial-statistic function with WPS. The statistic algorithm fpartial-statistic is invoked here to compute the partial statistic result. The statistical algorithm fpartial-statistic is implemented in Java or C#. The partial statistic refers to a partial in situ sensor observational data set statistic. STEP 6: Combine the partial statistic result and the overall statistic result using the function setReduce(statistictn, foverall-statistic). STtn represents the spatiotemporal parameters in foverall-statistic, which is the function used to generate the overall result of all the in situ sensor-based observation sets. The analysis algorithm foverall-statistic is developed in Java or C#. The InsertionOutput status information indicated by JobStatus is generated last with the setOutput(InsertionOutput) function. Overall statistic refers to the overall in situ sensor observational data set statistic. |
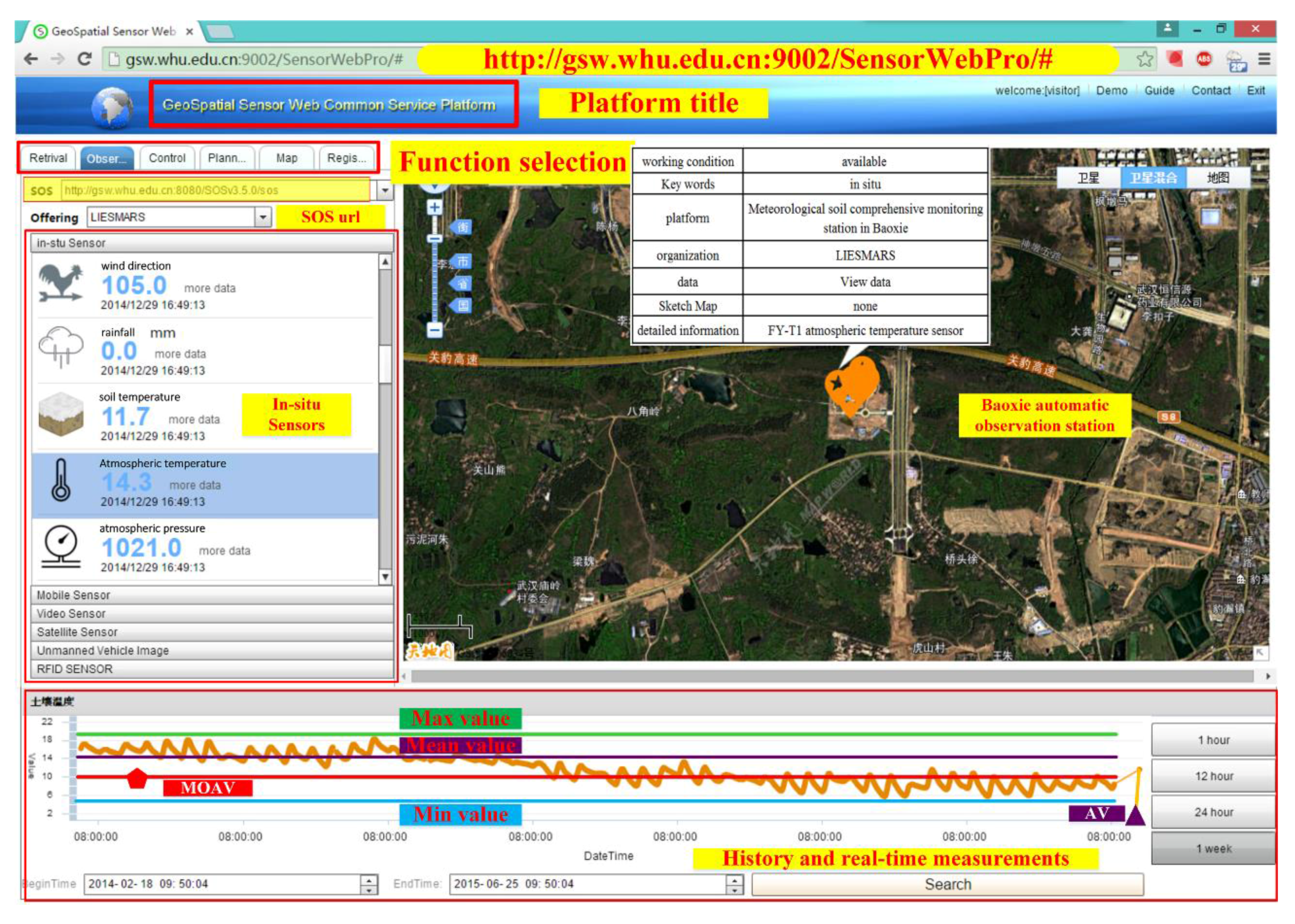
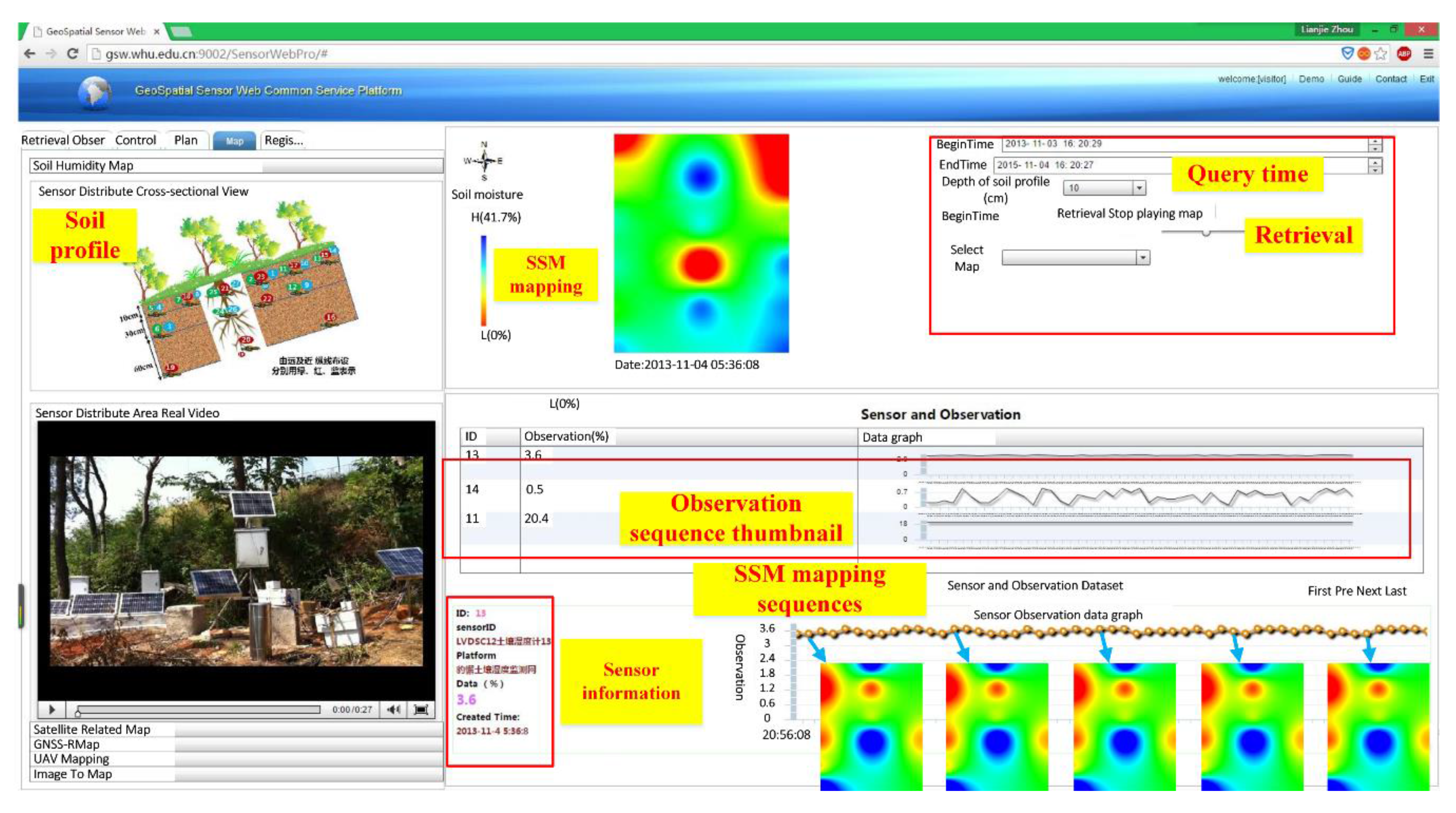
2.4. Web Service Operation Flow in SM Monitoring
3. Experiments
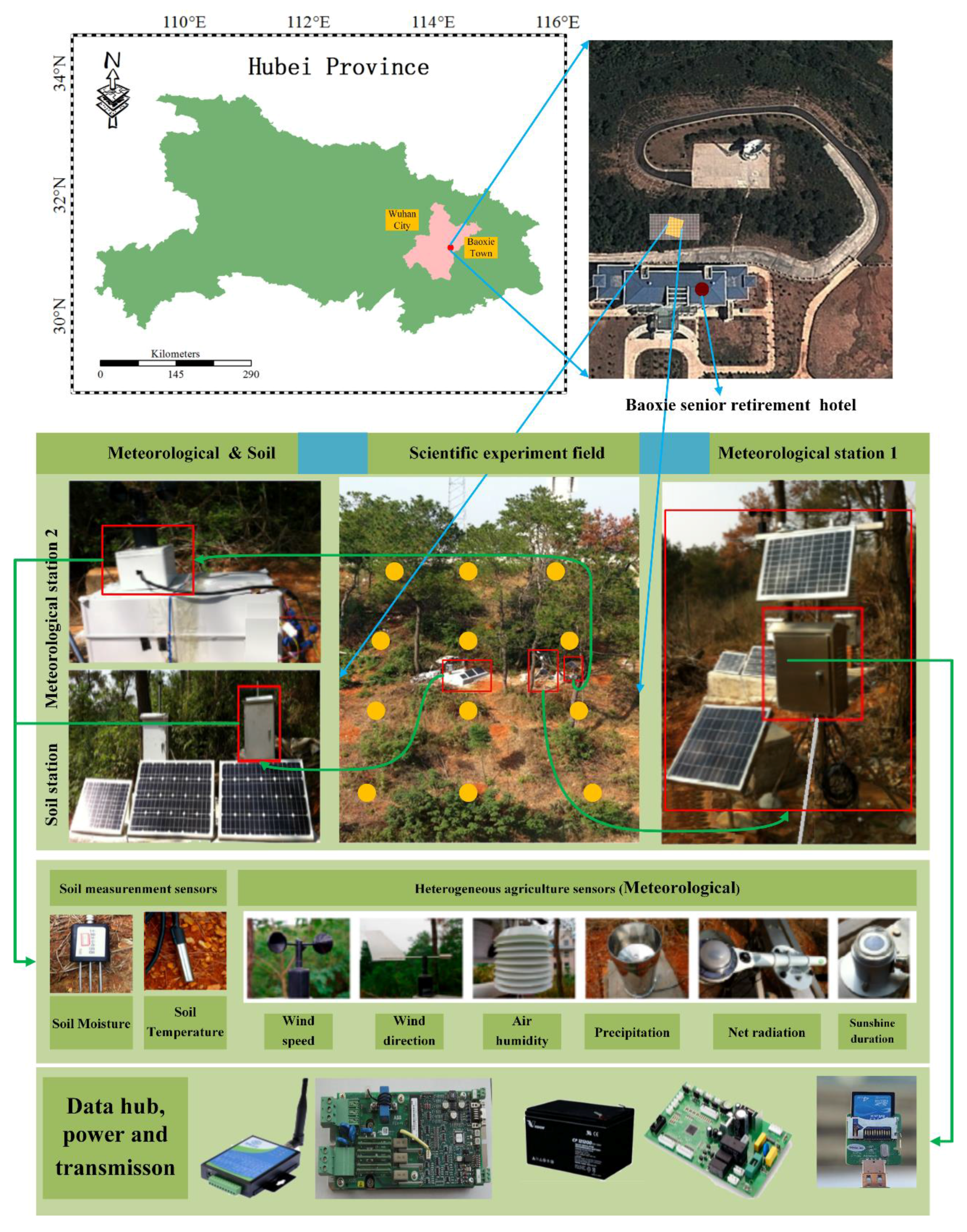
3.1. Experimental Environment
3.2. In the Context of Remote Sensing: Earth Observation data Vegetation Index (VI) Mapping
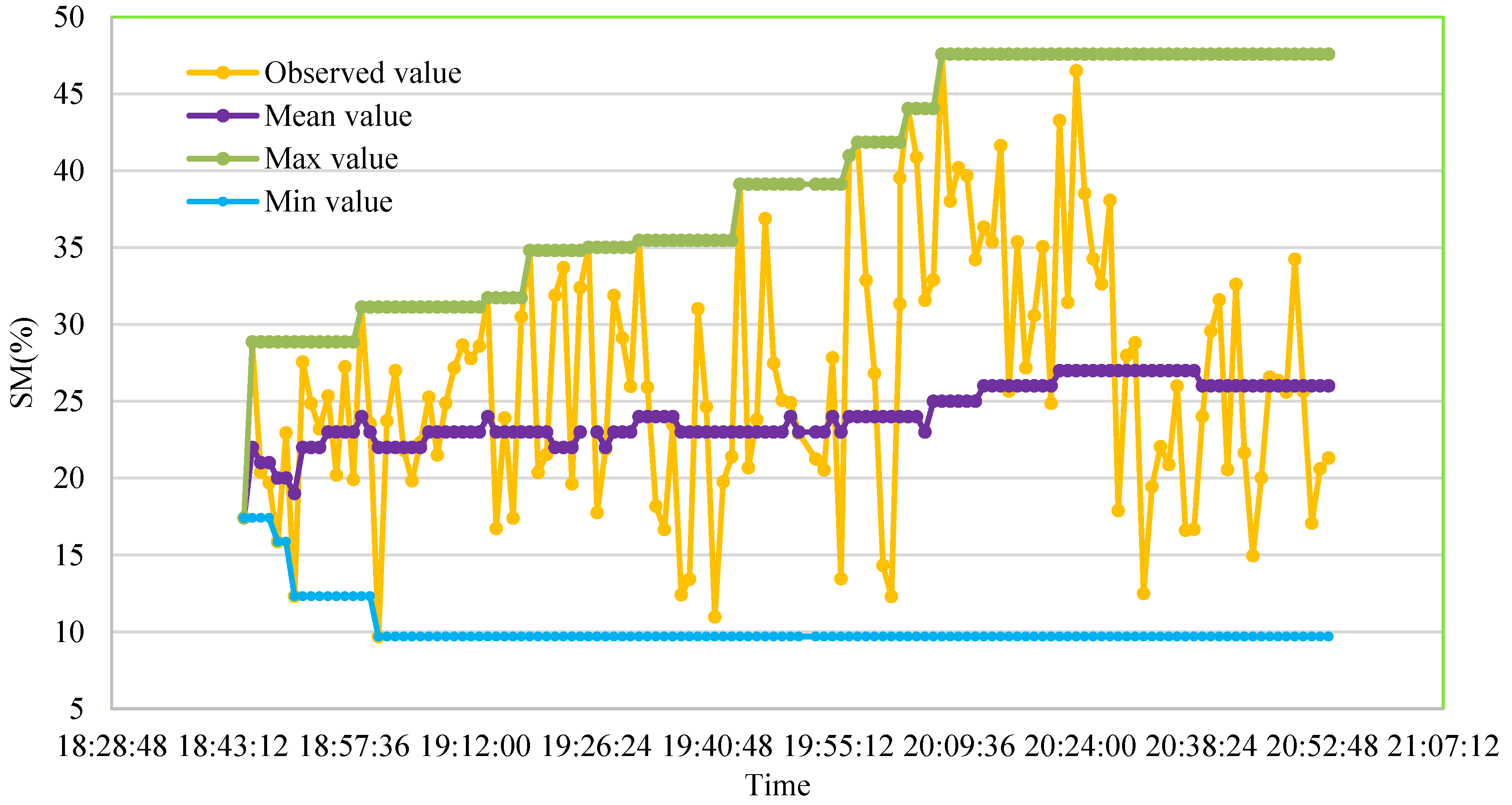
3.3. In the Context of in Situ Sensors: Near Real-Time Analysis
4. Discussion
4.1. Eligible Algorithm for PA Monitoring Based on Remote Sensing and in Situ Sensors
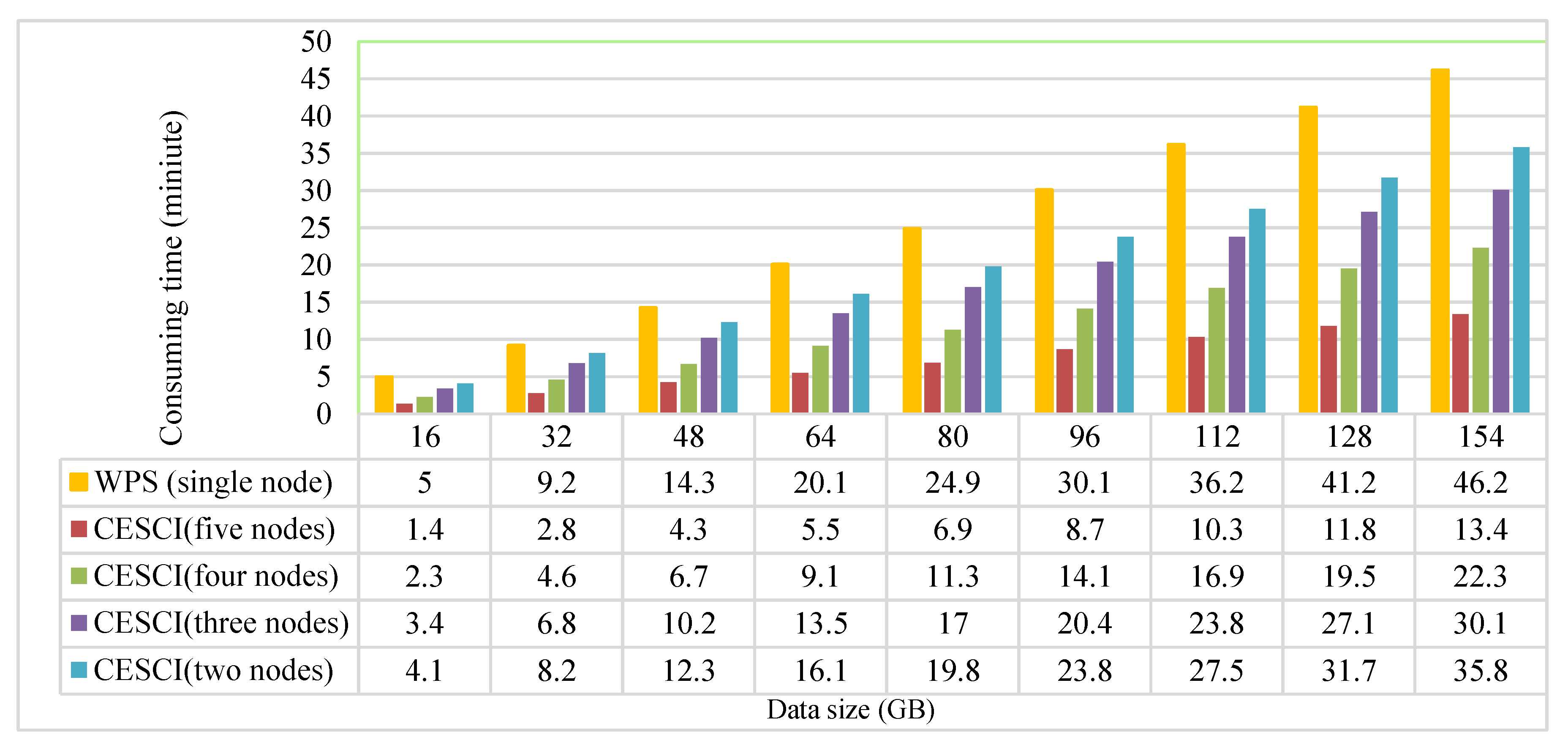
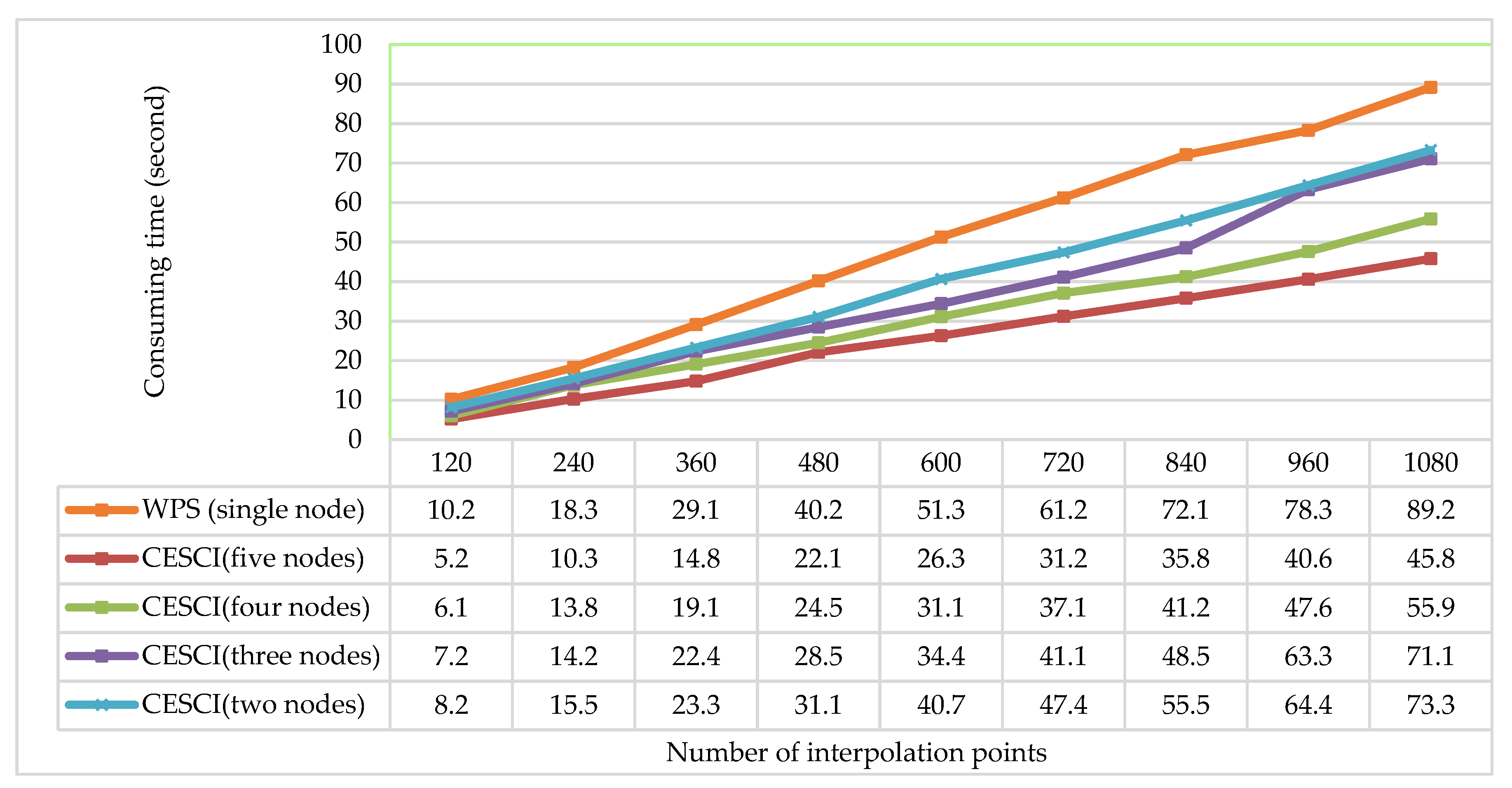
4.2. High-Efficiency Solution for PA Monitoring
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| PA | precision agriculture |
| SM | soil moisture |
| EOD | Earth Observation data |
| OGC | Open Geospatial Consortium |
| CI | cyberinfrastructure |
| CESCI | cloud computing-enabled spatio-temporal cyber-physical infrastructure |
| SOS | Sensor Observation Service |
| WPS | Web Processing Service |
| GDAL | Geospatial Data Abstraction Library |
| NDVI | Normalized Difference Vegetation Index |
| WFV | wide field of view |
| VI | vegetation indices |
| API | application interface |
| SOA | Service-Oriented Architecture |
References
- Zhang, N.; Wang, M.; Wang, N. Precision agriculture—a worldwide overview. Comput. Electron. Agric. 2002, 36, 113–132. [Google Scholar] [CrossRef]
- Yufeng, G.; Thomasson, J.A.; Sui, R. Remote sensing of soil properties in precision agriculture: A review. Front. Earth Sci. 2011, 5, 229–238. [Google Scholar]
- Schellberg, J.; Hill, M.J.; Gerhards, R.; Rothmund, M.; Braun, M. Precision agriculture on grassland: Applications, perspectives and constraints. Eur. J. Agron. 2008, 29, 59–71. [Google Scholar] [CrossRef]
- Sidorova, V.A.; Zhukovskii, E.E.; Lekomtsev, P.V.; Yakushev, V.V. Geostatistical analysis of the soil and crop parameters in a field experiment on precision agriculture. Eurasian Soil Sci. 2012, 45, 783–792. [Google Scholar] [CrossRef]
- Silva, C.B.; Moraes, M.A.F.D.D.; Molin, J.P. Adoption and use of precision agriculture technologies in the sugarcane industry of Sao Paulo state, Brazil. Precis. Agric. 2011, 12, 67–81. [Google Scholar] [CrossRef]
- Brocca, L.; Melone, F.; Moramarco, T.; Morbidelli, R. Soil moisture temporal stability over experimental areas in Central Italy. Geoderma 2009, 148, 364–374. [Google Scholar] [CrossRef]
- Legates, D.R.; Mahmood, R.; Levia, D.F.; DeLiberty, T.L.; Quiring, S.M.; Houser, C.; Nelson, F.E. Soil moisture: A central and unifying theme in Physical Geography. Prog. Phys. Geog. 2011, 35, 65–86. [Google Scholar] [CrossRef]
- Cho, E.; Choi, M.; Wagner, W. An assessment of remotely sensed surface and root zone soil moisture through active and passive sensors in northeast Asia. Remote Sens. Environ. 2015, 160, 166–179. [Google Scholar] [CrossRef]
- Entekhabi, D.; Rodriguez-Iturbe, I.; Castelli, F. Mutual interaction of soil moisture state and atmospheric processes. J. Hydrol. 1996, 184, 3–17. [Google Scholar] [CrossRef]
- Finn, M.P.; Lewis, M.D.; Bosch, D.D.; Giraldo, M.; Yamamoto, K.; Sullivan, D.G.; Kincaid, R.; Luna, R.; Allam, G.K.; Kvien, C.; et al. Remote Sensing of Soil Moisture Using Airborne Hyperspectral Data. GISci. Remote Sens. 2011, 48, 522–540. [Google Scholar] [CrossRef]
- Aquino-Santos, R.; González-Potes, A.; Edwards-Block, A.; Virgen-Ortiz, R.A. Developing a new wireless sensor network platform and its application in precision agriculture. Sensors 2011, 11, 1192–1211. [Google Scholar] [CrossRef] [PubMed]
- Srbinovska, M.; Gavrovski, C.; Borozan, V.; Dimcev, V.; Krkoleva, A. Environmental parameters monitoring in precision agriculture using wireless sensor networks. J. Clean. Prod. 2015, 88, 297–307. [Google Scholar] [CrossRef]
- Lausch, A.; Zacharias, S.; Dierke, C.; Pause, M.; Kühn, I.; Doktor, D. Analysis of vegetation and Soil Patterns using Hyperspectral Remote Sensing, EMI, and Gamma-Ray Measurements. Vadose Zone J. 2013, 12, 108–112. [Google Scholar] [CrossRef]
- Gooley, L.; Huang, J.; Pagé, D.; Triantafilis, J. Digital soil mapping of available water content using proximal and remotely sensed data. Soil Use Manag. 2013, 30, 139–151. [Google Scholar] [CrossRef]
- Hao, C.; Zhang, J.; Yao, F. Combination of multi-sensor remote sensing data for drought monitoring over Southwest China. Int. J. Appl. Earth Obs. 2015, 35, 270–283. [Google Scholar] [CrossRef]
- Botts, M.; Percivall, G.; Reed, C.; Davidson, J. OGC Sensor Web Enablement: Overview and High Level Architecture; Open Geospatial Consortium: Wayland, MA, USA, 2008. [Google Scholar]
- Bröring, A.; Echterhoff, J.; Jirka, S.; Simonis, I.; Everding, T.; Stasch, C.; Liang, S.; Lemmens, R. New generation sensor web enablement. Sensors 2011, 11, 2652–2699. [Google Scholar] [CrossRef] [PubMed]
- Stewart, C.A.; Simms, S.; Plale, B.; Link, M.; Hancock, D.Y.; Fox, G.C. What is cyberinfrastructure? In Proceedings of the 38th annual ACM SIGUCCS fall conference: Navigation and discovery, Norfolk, VI, USA, 24–27 October 2010.
- Moghaddam, M.; Entekhabi, D.; Goykhman, Y.; Li, K.; Liu, M.; Mahajan, A.; Nayyar, A.; Shuman, D.; Teneketzis, D. A wireless soil moisture smart sensor web using physics-based optimal control: Concept and initial demonstrations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 522–535. [Google Scholar] [CrossRef]
- Cyberinfrastructure Software Sustainability and Reusability: Report from an NSF-funded Workshop. Available online: https://scholarworks.iu.edu/dspace/handle/2022/6701 (accessed on 27 May 2016).
- Wang, S.; Zhu, X.G. Coupling cyberinfrastructure and geographic information systems to empower ecological and environmental research. BioScience 2008, 58, 94–95. [Google Scholar] [CrossRef]
- Wright, D.J.; Wang, S. The emergence of spatial cyberinfrastructure. Proc. Natl. Acad. Sci. USA 2011, 108, 5488–5491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, S.; Liu, Y. TeraGrid GIScience gateway: Bridging cyberinfrastructure and GIScience. Int. J. Geogr. Inf. Sci. 2009, 23, 631–656. [Google Scholar] [CrossRef]
- Wang, S.; Anselin, L.; Bhaduri, B.; Crosby, C.; Goodchild, M.F.; Liu, Y.; Nyerges, T.L. CyberGIS software: A synthetic review and integration roadmap. Int. J. Geogr. Inf. Sci. 2013, 27, 2122–2145. [Google Scholar] [CrossRef]
- Phillips, A.J.L.; Newlands, N.K.; Liang, S.H.L.; Ellert, B.H. Integrated sensing of soil moisture at the field-scale: sampling, modelling and sharing for improved agricultural decision-support. Comput. Electron. Agric. 2014, 107, 73–88. [Google Scholar] [CrossRef]
- Korduan, P.; Bill, R.; Böling, S. An interoperable Geodata infrastructure for precision agriculture. In Proceedings of the 7th AGILE Conference on Geographic Information Science, Heraklion, Greece, 29 April–1 May 2004.
- Zhang, X.; Seelan, S.; Seielstad, G. Digital northern great plains: A web-based system delivering near real time remote sensing data for precision agriculture. Remote Sens. 2010, 2, 861–873. [Google Scholar] [CrossRef]
- Abdelfattah, M.A.; Kumar, A.T. A web-based GIS enabled soil information system for the United Arab Emirates and its applicability in agricultural land use planning. Arab. J. Geosci. 2014, 8, 1–15. [Google Scholar] [CrossRef]
- Stanoevska-Slabeva, K.; Wozniak, T.; Ristol, S. (Eds.) Grid and Cloud Computing: A Business Perspective on Technology and Applications; Springer: Berlin, Germany, 2010.
- Chung, W.C.; Chen, C.C.; Jm, H.; Lin, C.Y.; Hsu, W.L.; Wang, Y.C.; Lee, D.T.; Lai, F.; Huang, C.W.; Chang, Y.J. CloudDOE: A user-friendly tool for deploying Hadoop clouds and analyzing high-throughput sequencing data with MapReduce. PLoS ONE 2014, 9, e98146. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.L.P.; Zhang, C.Y. Data-intensive applications, challenges, techniques and technologies: A survey on big data. Inform. Sci. 2014, 275, 314–347. [Google Scholar] [CrossRef]
- Yang, W.; Liu, X.; Zhang, L.; Yang, L.T. Big data real-time processing based on storm. In Proceedings of the 12th IEEE International Conference on Trust, Security and Privacy in Computing and Communications, Melbourne, VIC, Australia, 16–18 July 2013; Volume 8, pp. 1784–1787.
- Dean, J.; Ghemawat, S. MapReduce: Simplified data processing on large clusters. Commun. ACM 2008, 51, 107–113. [Google Scholar] [CrossRef]
- Juve, G.; Deelman, E.; Berriman, G.B.; Berman, B.P.; Maechling, P. An evaluation of the cost and performance of scientific workflows on Amazon EC2. J. Grid Comput. 2012, 10, 5–21. [Google Scholar] [CrossRef]
- Behzad, B.; Padmanabhan, A.; Liu, Y.; Liu, Y.; Wang, S. Integrating CyberGIS gateway with Windows Azure: A case study on MODFLOW groundwater simulation. In Proceedings of the ACM SIGSPATIAL Second International Workshop on High Performance and Distributed Geographic Information Systems, Chicago, IL, USA, 1 November 2011; pp. 26–29.
- Jiang, W.; Zhang, L.; Liao, X.; Jin, H.; Peng, Y. A novel clustered MongoDB-based storage system for unstructured data with high availability. Computing 2014, 96, 455–478. [Google Scholar] [CrossRef]
- Bröring, A.; Stasch, C.; Echterhoff, J. OGC Sensor Observation Service Interface Standard; Version 2.0; Open Geospatial Consortium: Wayland, MA, USA, 2012. [Google Scholar]
- Yue, P.; Jiang, L.; Hu, L. Google fusion tables for managing soil moisture sensor observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4414–4421. [Google Scholar] [CrossRef]
- Schut, P. OpenGIS Web Processing Service; Open Geospatial Consortium: Wayland, MA, USA, 2007. [Google Scholar]
- Chen, Z.; Chen, N.; Yang, C.; Di, L. Cloud computing enabled web processing service for earth observation data processing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1637–1649. [Google Scholar] [CrossRef]
- Qin, C.; Zhan, L.; Zhu, A. How to apply the Geospatial Data Abstraction Library (GDAL) properly to parallel geospatial raster I/O? Trans. GIS 2014, 18, 950–957. [Google Scholar] [CrossRef]
- Ghulam, A.; Qin, Q.; Teyip, T.; Li, Z. Modified Perpendicular Drought Index (MPDI): A real-time drought monitoring method. ISPRS J. Photogramm. Remote Sens. 2007, 62, 150–164. [Google Scholar] [CrossRef]
- Candiago, S.; Remondino, F.; de Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef]
- McNally, A.; Shukla, S.; Arsenault, K.R.; Wang, S.; Peters-Lidard, C.D.; Verdin, J.P. Evaluating ESA CCI soil moisture in east Africa. Int. J. Appl. Earth Obs. 2016, 48, 96–109. [Google Scholar] [CrossRef]
- Xiao, Z.; Liang, S.; Wang, T.; Liu, Q. Reconstruction of satellite-retrieved land-surface reflectance based on temporally-continuous vegetation indices. Remote Sens. 2015, 7, 9844–9864. [Google Scholar] [CrossRef]
- Yagci, A.L. The effect of corn–soybean rotation on the NDVI-based drought indicators: A case study in Iowa, USA, using vegetation condition index. Gisci. Remote Sens. 2015, 52, 290–314. [Google Scholar] [CrossRef]
- Geospatial Sensor Web Common Service Management Platform. Available online: http://gsw.whu.edu.cn:9002/SensorWebPro/# (accessed on 22 October 2015).
- Lu, G.; Wong, D. An adaptive inverse-distance weighting spatial interpolation technique. Comput. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Mueller, T.G.; Pusuluri, N.B.; Mathias, K.K.; Cornelius, P.L.; Barnhisel, R.I.; Shearer, S.A. Map quality for ordinary kriging and inverse distance weighted interpolation. Soil Sci. Soc. Am. J. 2004, 68, 2042–2047. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Map part (split0 < splitk < splitm, observation[0]~observation[m × n]) | Reduce part |
|---|---|---|
| Max Value | max[splitk] = observation[splitk × n]; | max = max[split0]; |
| for (i = 1; i++; i < n) | for (i = split1; i++; i < splitm) | |
| if (observation[splitk × n + i] > max) max[splitk] = observation[splitk × n + i]; | if (max[i] > max) max = max[i]; | |
| Min Value | min[splitk] = observation[splitk × n]; | min = min[split0]; |
| for (i = 1; i++; i < n) | for (i = split 1; i++; i < splitm) | |
| if (observation[splitk × n + i] < mix) mix[splitk] = observation[i + splitk × n]; | if (min[i] < min) min = min[i]; | |
| Mean Value | sum[splitk] = observation[splitk × n]; | sum = mean[split0]; |
| for (i = 1; i++; i < n) | for (i = split1; i++; i < splitm) | |
| sum[splitk] = sum[splitk] + observation[splitk × n + i]; | sum= sum + mean[i]; | |
| mean[splitk] = sum[splitk]/n; | mean = sum/m; | |
| Most Often Appearing Value (MOAV) | MOAV[splitk] = observation[splitk × n]; | MOAV = MOAV[split0]; |
| for (i = 1; i++; i < n) | for (i = split1; i++; i < splitm) | |
| if (frequency.(observation [splitk × n + i]) > frequency.(MOAV[splitk])) MOAV[splitk] = observation[splitk × n + i]; | if (frequency.(MOAV[i]) > frequency.(MOAV)) MOAV = MOAV[i]; | |
| Abnormal Value (AV) | AV[splitk] = observation[splitk × n]; | None |
| for (i = 1; i++; i < n) | ||
| {if (! (Valuemin ≤ observation[splitk × n + i] ≤ Valuemax)) return observation[splitk × n + i]; | ||
| continue; | ||
| } |
| CIs and Methods | Characteristic | |||
|---|---|---|---|---|
| SM Mapping Computational Capability | In Situ Observation Analysis Timeliness | Distributed | SOA | |
| CESCI (five nods) | 1.4 min/Hubei province | Near real-time | Yes | Yes |
| Korduan | Unsupported | Unsupported | No | No |
| Zhang | Unsupported | Near real-time | No | No |
| Mahmoud | Unsupported | Unsupported | No | No |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, L.; Chen, N.; Chen, Z. A Cloud Computing-Enabled Spatio-Temporal Cyber-Physical Information Infrastructure for Efficient Soil Moisture Monitoring. ISPRS Int. J. Geo-Inf. 2016, 5, 81. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5060081
Zhou L, Chen N, Chen Z. A Cloud Computing-Enabled Spatio-Temporal Cyber-Physical Information Infrastructure for Efficient Soil Moisture Monitoring. ISPRS International Journal of Geo-Information. 2016; 5(6):81. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5060081
Chicago/Turabian StyleZhou, Lianjie, Nengcheng Chen, and Zeqiang Chen. 2016. "A Cloud Computing-Enabled Spatio-Temporal Cyber-Physical Information Infrastructure for Efficient Soil Moisture Monitoring" ISPRS International Journal of Geo-Information 5, no. 6: 81. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5060081