
Updating Road Networks by Local Renewal from GPS Trajectories



Abstract
:1. Introduction
1.1. Trajectory Data Acquisition
1.2. Road Map Generation with Trajectories
1.3. Hidden Markov Model
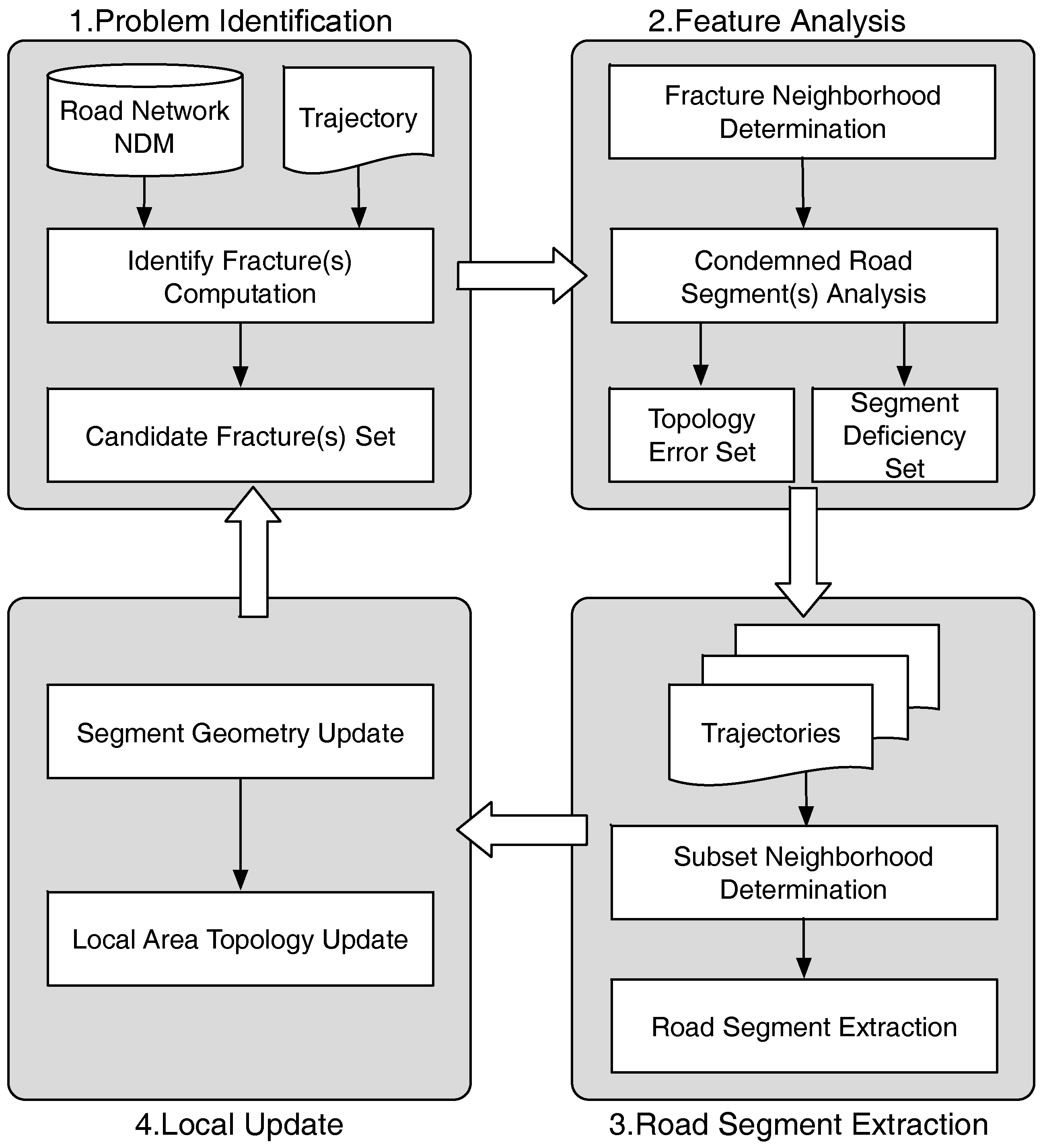
2. A Spiral Inspection and Renewal Strategy
2.1. Problem Statement
2.2. Spiral Updating Strategy
- The determination of the neighborhood(s) of PRS(s) considers not only the position information of the corresponding candidate points but also takes account of the distance from the candidate points of the first sampling point to the candidate points of the final sampling point in a fracture. To avoid involving massive amounts of trajectory data in the later computation, we employ the Euclidean distance to determine the range of each neighborhood.
- Characteristic and type analysis measures the transition probabilities in the HMM, great circle distances and the actual average speeds between neighboring points falling into the neighborhood(s) built above. It then compares these values with regular constraints on relative path(s).
3. The HMM-Based PRS Detection Algorithm
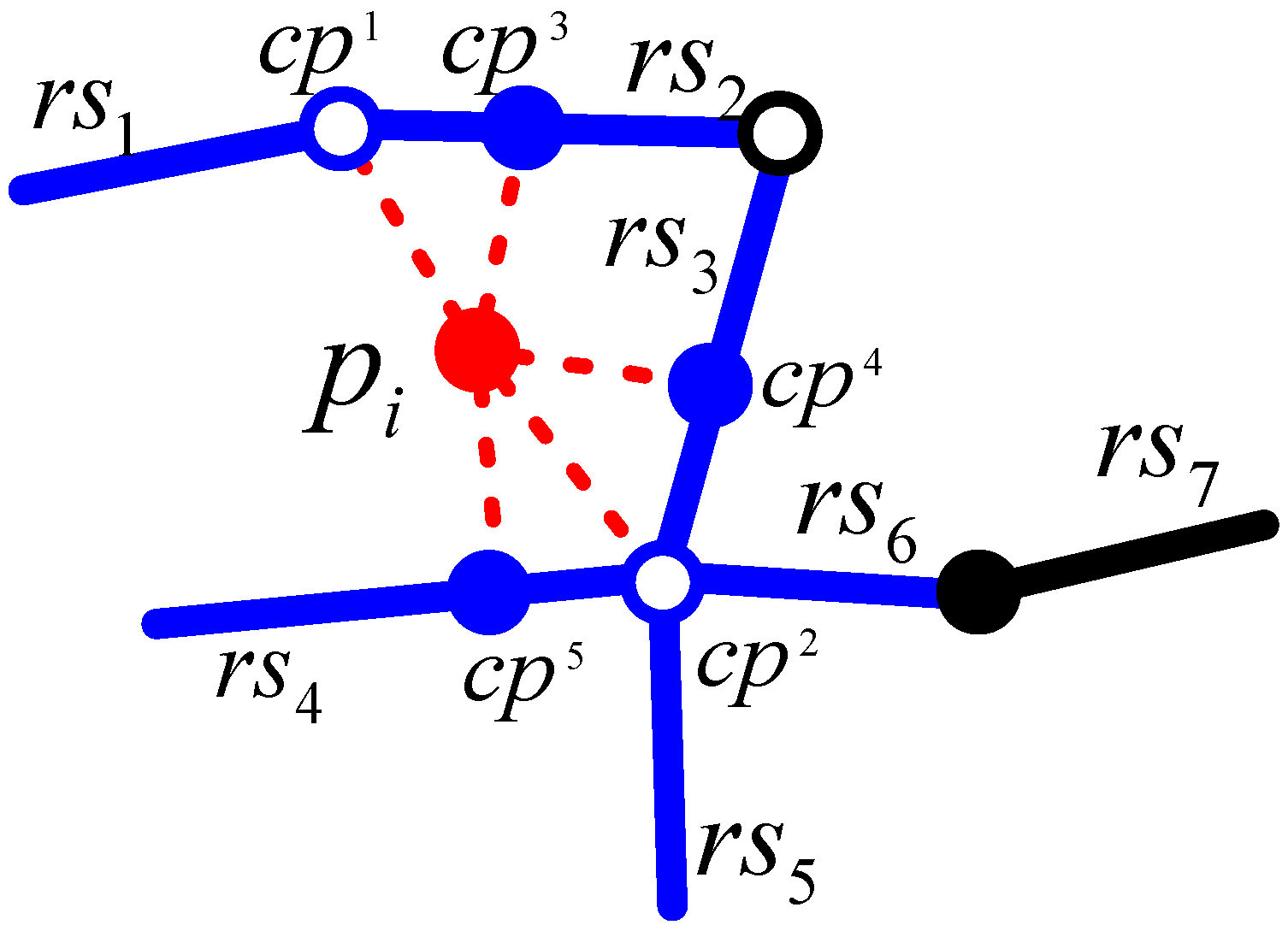
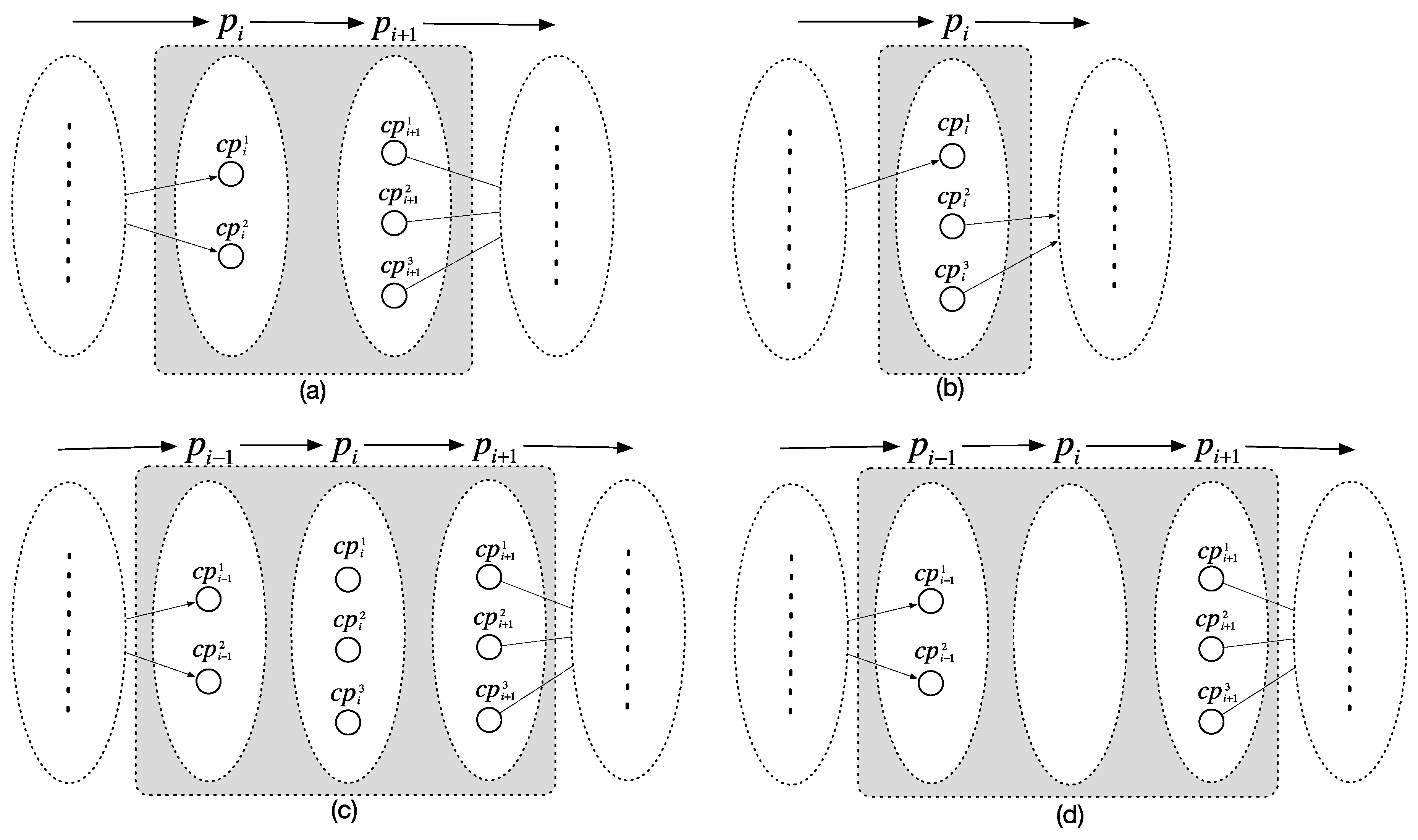
3.1. Candidate Position Preparation
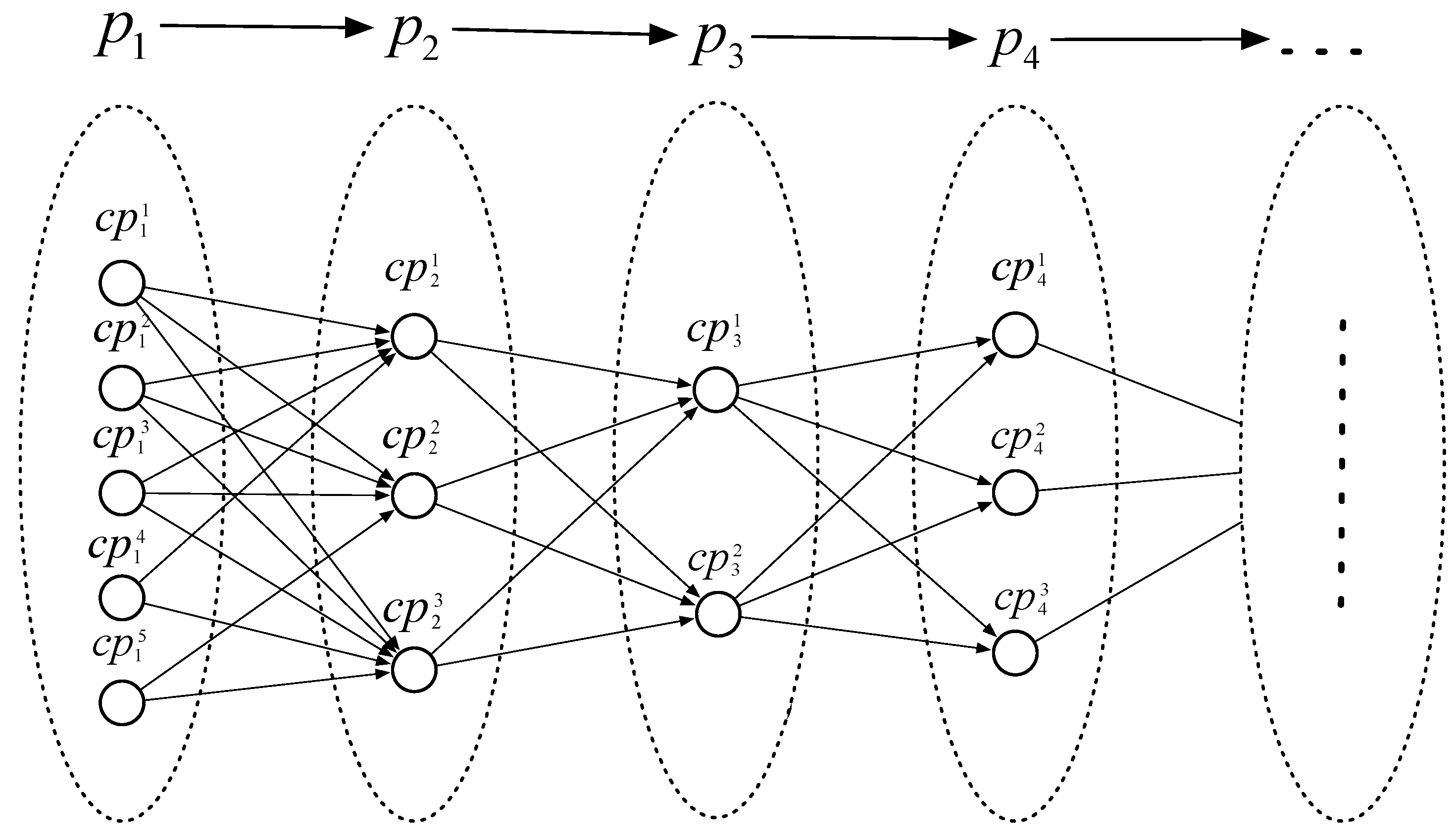
3.2. HMM for Problem Detection
3.3. Problem Detection
| Algorithm IdentifyFracture |
| Input: The candidate position sequence CPs, Road network G. |
| Output: The fracture sequence F in G |
| 1: G′ = GenerateHMMG(G,CPs); // generates HMM graph G’ |
| 2: Initialize F as an empty list; // a sequence of fractures |
| 3: Initialize f as an empty fracture; // a container of fractures |
| 4: for each sampling point pi do |
| 5: if cp set of pi is empty then add pi to f; |
| 6: continue;// moves to the next sampling point |
| 7: if no subpath from cp set of pi to next is available then add pi to f; |
| 8: continue;// moves to the next sampling point |
| 9: if no cp of pi both connects subpaths on two sides then |
| 10: if pi is not endpoint of trajectory then add pi to f; |
| 11: if the fracture is not empty then push f into F and clear f; |
| 12: return F; |
4. Local Road Segments Extraction and Updating
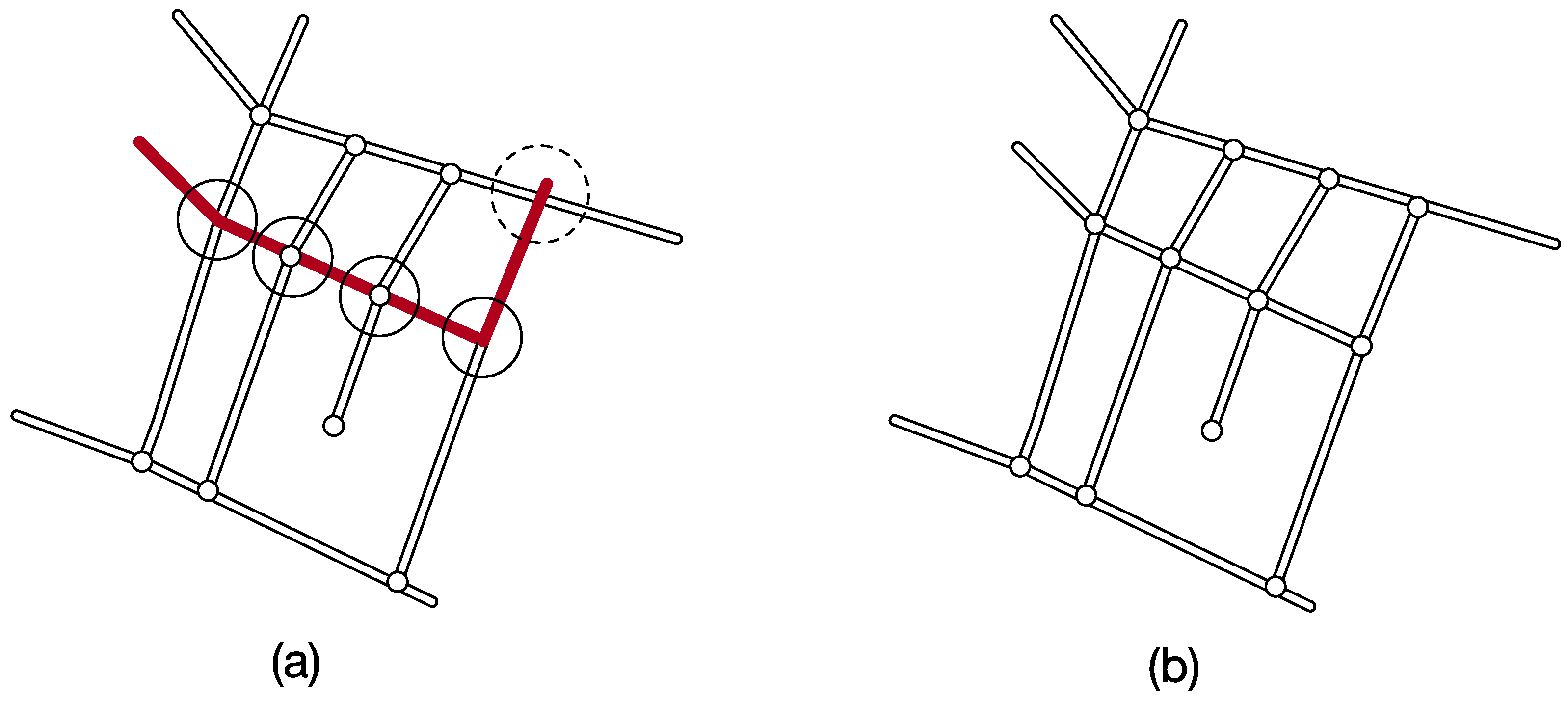
4.1. Problem Neighborhood
4.2. Road Segment Extraction
- (1)
- determining a suitable number of clusters (k) by means of “Silhouettes” [32] after obtaining the subsections of multiple trajectory data inside the problem neighborhood;
- (2)
- randomly selecting k sampling points as the initial medoids and iteratively checking whether any medoid needs to be replaced by calculating the dissimilarities between the unselected points and medoids;
- (3)
- reducing all medoids by thresholds, such as the steering angle and distance, and connecting the remaining medoids in sequence.
4.3. Local Road Segments Updating
5. Experiments
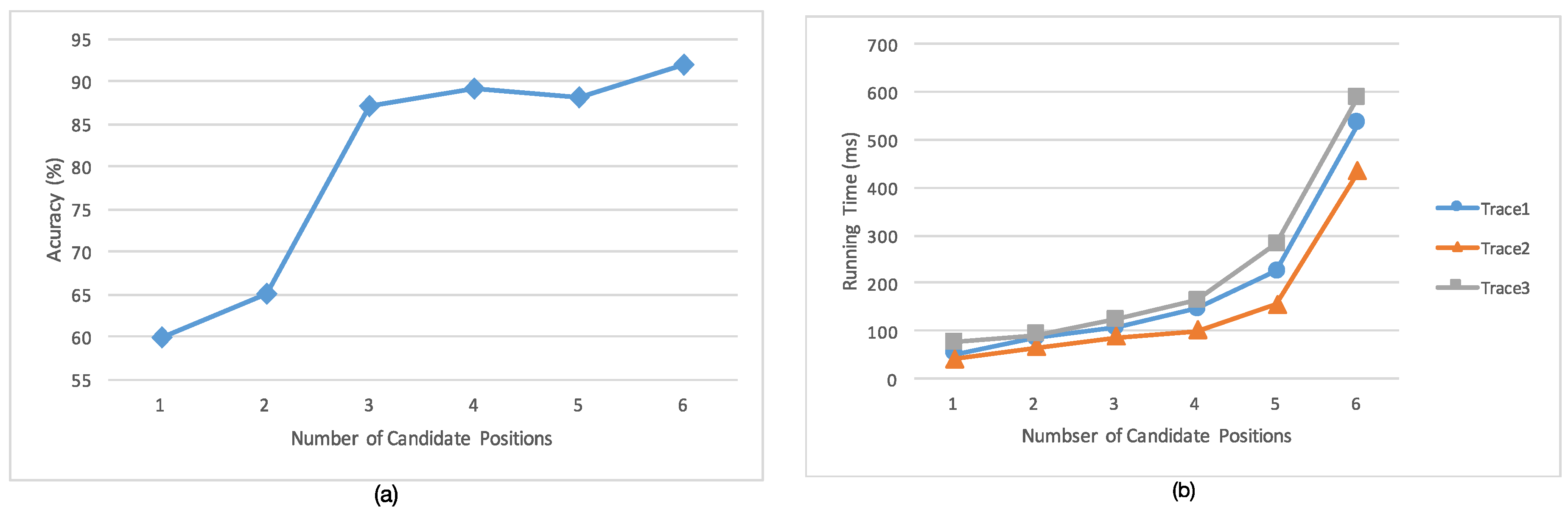
5.1. Experimental Setting
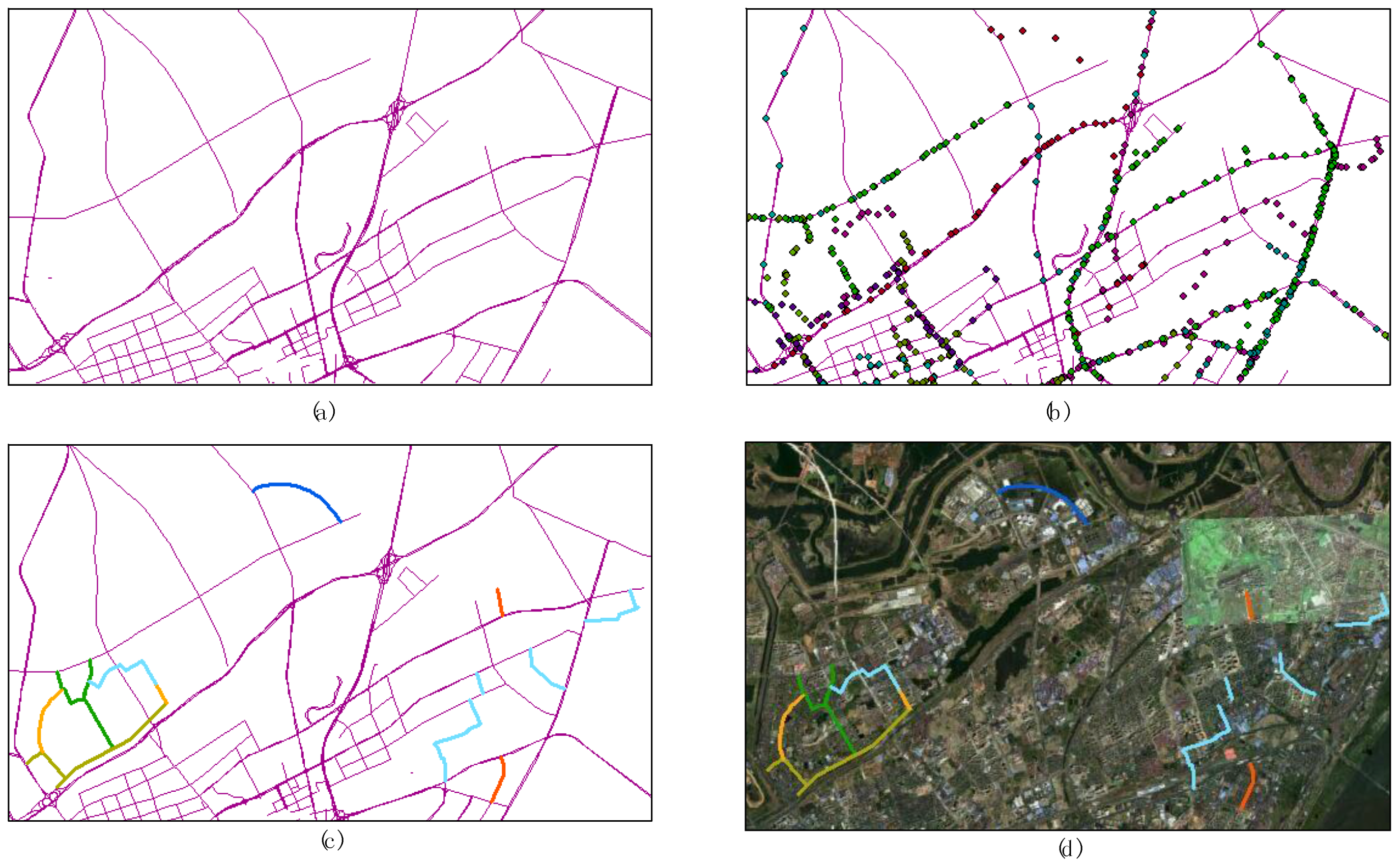
5.2. Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| LBSN | Location-based Social Networking |
| HMM | Hidden Markov Model |
| OSM | OpenStreetMap |
| PRS | Problem Road Segment |
References
- Fusco, S.J.; Michael, K.; Michael, M.G. Using a social informatics framework to study the effects of location-based social networking on relationships between people: A review of literature. In Proceedings of the IEEE International Symposium on Technology and Society (ISTAS’10), Wollongong, Australia, 7–9 June 2010.
- Karimi, H.A.; Zimmerman, B.; Ozcelik, A.; Roongpiboonsopit, D. SoNavNet: A framework for social navigation networks. In Proceedings of the International Workshop on Locations Based Social Networks (LBSN’09), Seattle, WA, USA, 4–6 November 2009.
- Haklay, M.; Weber, P. OpenStreetMap: User-generated street maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- Porikli, F. Road extraction by point-wise Gaussian models. Proc. SPIE 2003. [Google Scholar] [CrossRef]
- Li, X.; Zhang, S.; Pan, X.; Dale, P.; Cropp, R. Straight road edge detection from high-resolution remote sensing images based on ridgelet transform with revised parallel-beam radon transform. Int. J. Remote Sens. 2010, 31, 5041–5059. [Google Scholar] [CrossRef]
- Unsalan, C.; Sirmacek, B. Road network detection using probabilistic and graph theoretical methods. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4441–4453. [Google Scholar] [CrossRef]
- Doucette, P.; Agouris, P.; Stefanidis, A.; Musavi, M. Self-organised clustering for road extraction in classified imagery. ISPRS J. Photogramm. Remote Sens. 2001, 55, 347–358. [Google Scholar] [CrossRef]
- Shi, W.; Miao, Z.; Wang, Q.; Zhang, H. Spectral-spatial classification and shape features for urban road centreline extraction. IEEE Geosci. Remote Sens. Lett. 2014, 11, 788–792. [Google Scholar]
- Mumtaz, S.A.; Kevin, M. Fusion of high resolution LiDAR and aerial images for object extraction. In Proceedings of the 2nd International Conference on Advances in Space Technologies, Islamabad, Pakistan, 29–30 November 2008; pp. 137–142.
- Fang, L.; Yang, B. Automated extracting structural roads from mobile laser scanning point clouds. Acta Geod. Cartogr. Sin. 2013, 42, 260–267. [Google Scholar]
- Lee, Y.; Cho, S.B. Extracting meaningful contexts from mobile life log. In Lecture Notes in Computer Science; Springer: Berlin, Germany, 2007; pp. 750–759. [Google Scholar]
- Zheng, Y.; LI, Q.; Chen, Y.; Xie, X.; Ma, W. Understanding mobility based on GPS data. In Proceedings of the 10th International Conference on Ubiquitous Computing (UbiComp’08), Seoul, Korea, 21–24 September 2008.
- Efentakis, A.; Brakatsoulas, S.; Grivas, N.; Lamprianidis, G.; Patroumpas, K.; Pfoser, D. Towards a flexible and scalable fleet management service. In Proceedings of the ACM Sigspatial International Workshop on Computational Transportation Science, Orlando, FL, USA, 5–8 November 2013; pp. 79–84.
- Brakatsoulas, S.; Pfoser, D.; Salas, R.; Wenk, C. On map-matching vehicle tracking data. In Proceedings of the 31st VLDB Conference on Very Large Data Bases, Trento, Italy, 4–6 October 2005; pp. 853–864.
- Guo, T.; Iwamura, K.; Koga, M. Towards high accuracy road maps generation from massive GPS traces data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGRASS’07), Barcelona, Spain, 23–28 July 2007; pp. 667–670.
- Ahmed, M.; Wenk, C. Constructing street networks from GPS trajectories. In Proceedings of the 20th Annual European Symposium on Algorithms, Ljubljana, Slovenia, 10–12 September 2012; pp. 60–71.
- Ahmed, M.; Karagiorgou, S.; Pfoser, D.; Wenk, C. A comparison and evaluation of map construction algorithms using vehicle tracking data. Geoinformatica 2015, 19, 601–632. [Google Scholar] [CrossRef]
- Edelkamp, S.; Schroedl, S. Route planning and map inference with global positioning traces. In Computer Science in Perspective: Essays Dedicated to Thomas Ottmann; Springer-Verlag: New York, NY, USA, 2003; pp. 128–151. [Google Scholar]
- Schroedl, S.; Wagstaff, K.; Rogers, S.; Langley, P.; Wilson, C. Mining GPS traces for map refinement. Data Min. Knowl. Discov. 2004, 9, 59–87. [Google Scholar] [CrossRef]
- Worrall, S.; Nebot, E. Automated process for generating digitized maps through GPS data compression. In Proceedings of the 2007 Australasian Conference on Robotics and Automation Brisbane, Brisbane, Australia, 10–12 December 2007.
- Chen, C.; Cheng, Y. Roads digital map generation with multi-track GPS data. In Proceedings of the 2008 International Workshop on Geoscience and Remote Sensing, Washington, DC, USA, 21–22 December 2008.
- Shi, W.; Shen, S.; Liu, Y. Automatic generation of road network map from massive GPS vehicle trajectories. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009; pp. 48–53.
- Cao, L.; Krumm, J. From GPS traces to a routable road map. In Proceedings of the Workshop on Advances in Geographic Information Systems, Seattle, WA, USA, 4–6 November 2009.
- Fathi, A.; Krumm, J. Detecting road intersections from GPS traces. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2010; pp. 56–69. [Google Scholar]
- Kasemsuppakorn, P.; Karimi, A.H. A pedestrian network construction algorithm based on multiple GPS traces. Transp. Res. Part C 2013, 26, 285–300. [Google Scholar] [CrossRef]
- Biagioni, J.; Eriksson, J. Map inference in the face of noise and disparity. In Proceedings of the International Conference on Advances in Geographic Information Systems, Redondo Beach, CA, USA, 7–9 November 2012.
- Karagiorgou, S.; Pfoser, D.; Skoutas, D. Segmentation-based road network construction. In Proceedings of the International Conference on Advances in Geographic Information Systems, Orlando, FL, USA, 5–8 November 2013.
- Rogers, S.; Langley, P.; Wilson, C. Mining GPS data to augment road models. In Proceedings of the International Conference on Knowledge Discovery and Data Mining, San Jose, CA, USA, 15–18 August 1999.
- Zhang, L.; Thiemann, F.; Sester, M. Integration of GPS traces with road map. In Proceedings of the International Conference on Advances in Geographic Informatics Systems (ACM SIGSPATIAL’10), San Jose, CA, USA, 3–5 November 2010.
- Li, J.; Qin, Q.; Xie, C.; Zhao, Y. Integrated use of spatial and semantic relationships for extracting road networks from floating car data. Int. J. Appl. Earth Obs. Geoinform. 2012, 19, 238–247. [Google Scholar] [CrossRef]
- Rabiner, L.; Juang, B. An introduction to hidden Markov models. IEEE ASSP Mag. 1986, 3, 4–16. [Google Scholar] [CrossRef]
- Kaufman, L.; Rousseeuw, P.J. Clustering by means of medoid. In Statistical Data Analysis Based on the L1 Norm; Dodge, Y., Ed.; Elsevier/North-Holland: Amsterdam, the Netherlands, 1987; pp. 405–416. [Google Scholar]
- Newson, P.; Krumm, J. Hidden markov map matching through noise and sparseness. In Proceedings of the International Conference on Advances in Geographic Informatics Systems (ACM SIGSPATIAL’09), Seattle, WA, USA, 4–6 November 2009.
- Raymond, R.; Morimura, T.; Osogami, T.; Hirosue, H. Map matching with hidden Markov model on sampled road network. In Proceedings of the 21st International Conference on Pattern Recognition (ICPR 2012), Tsukuba, Japan, 11–15 November 2012.
- Szwed, P.; Pekala, K. An incremental map-matching algorithm based on hidden Markov model. In Proceedings of International Conference on Artificial Intellifence and Soft Computing, Zakopane, Poland, 1–5 June 2014; pp. 579–590.
- Wiedemann, C. External evaluation of road networks. ISPRS Arch. 2003, 34, 93–98. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Round 1 | Round 2 | Round 3 | Round 4 | Round 5 | Round 6 | |
|---|---|---|---|---|---|---|
| Mgeometry | 75.5% | 88.5% | 88.5% | 85.8% | 87.4% | 86.6% |
| Mtopology | 80% | 77.8% | 66.7% | 75% | 66.7% | 76.9% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, T.; Xiang, L.; Gong, J. Updating Road Networks by Local Renewal from GPS Trajectories. ISPRS Int. J. Geo-Inf. 2016, 5, 163. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5090163
Wu T, Xiang L, Gong J. Updating Road Networks by Local Renewal from GPS Trajectories. ISPRS International Journal of Geo-Information. 2016; 5(9):163. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5090163
Chicago/Turabian StyleWu, Tao, Longgang Xiang, and Jianya Gong. 2016. "Updating Road Networks by Local Renewal from GPS Trajectories" ISPRS International Journal of Geo-Information 5, no. 9: 163. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi5090163