A Geometric Framework for Detection of Critical Points in a Trajectory Using Convex Hulls



Abstract
:1. Introduction
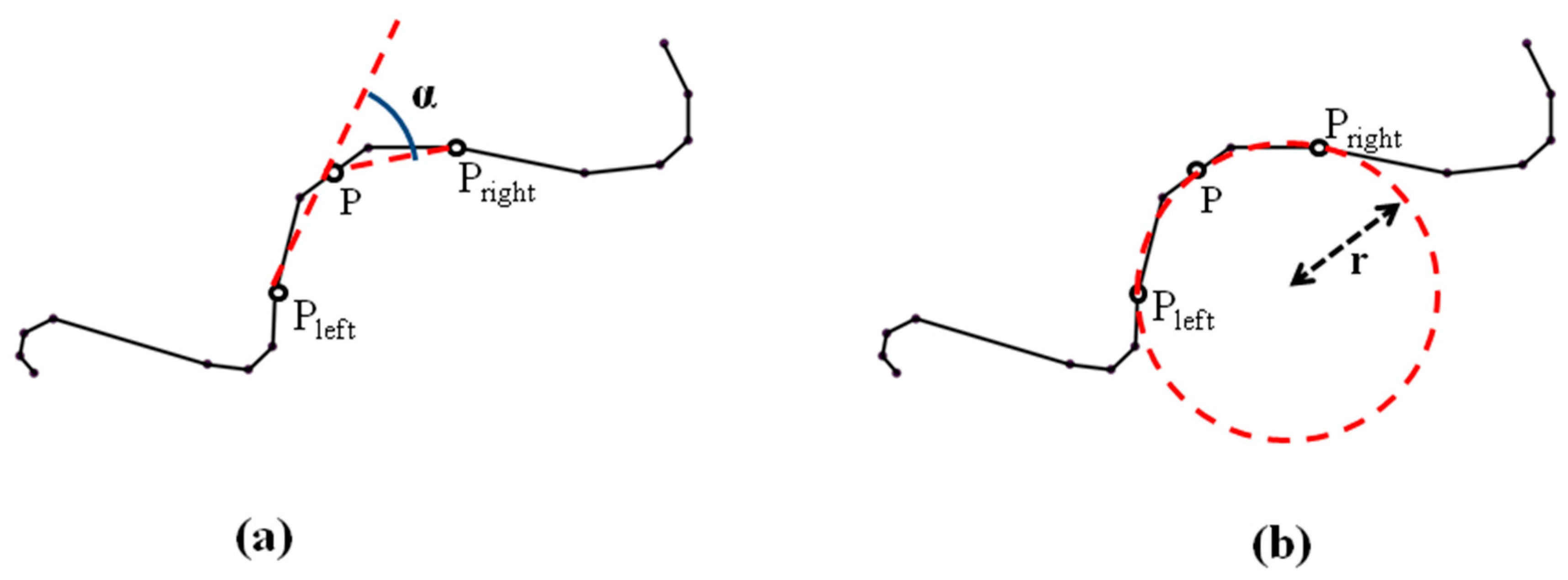
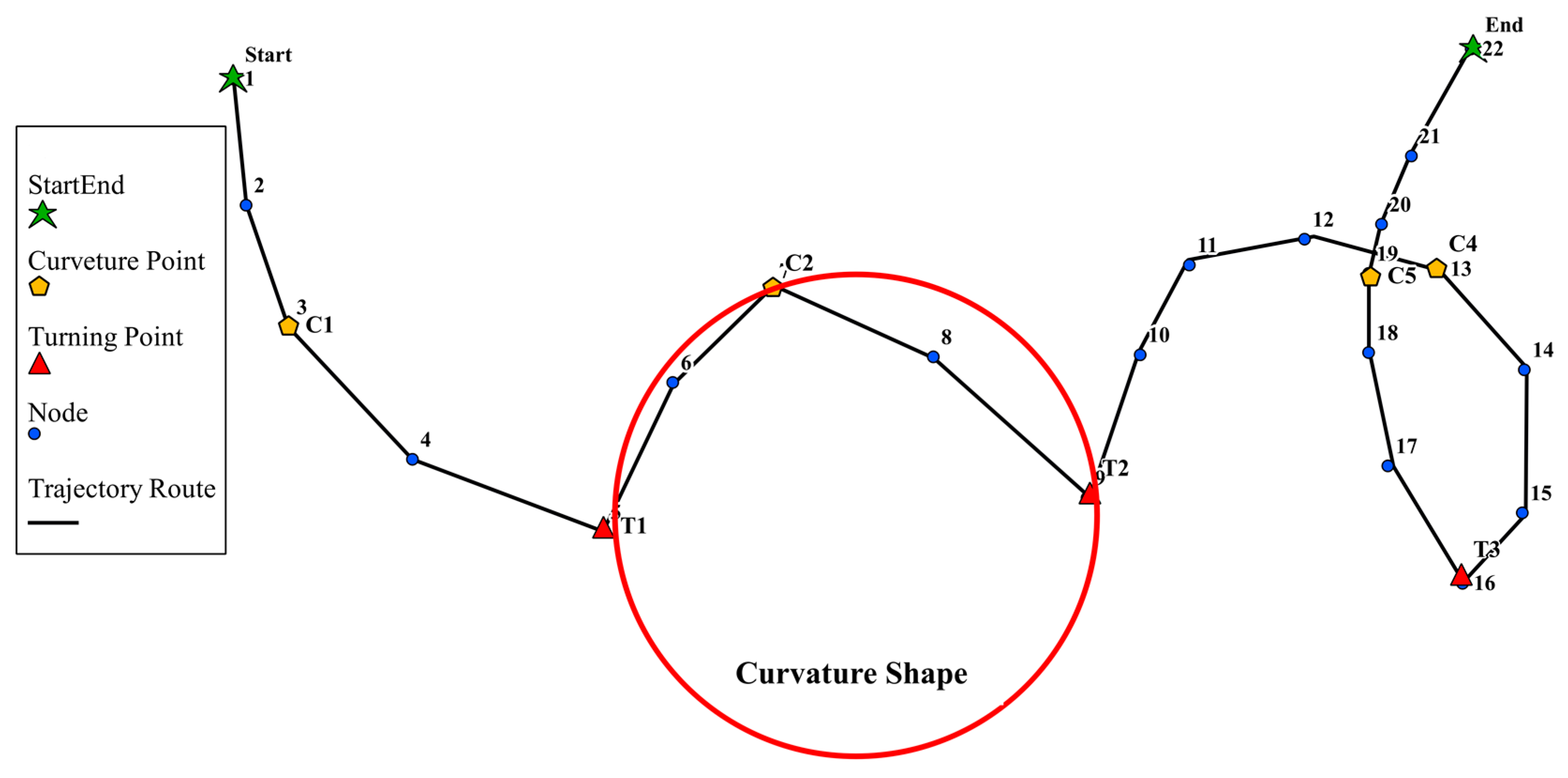
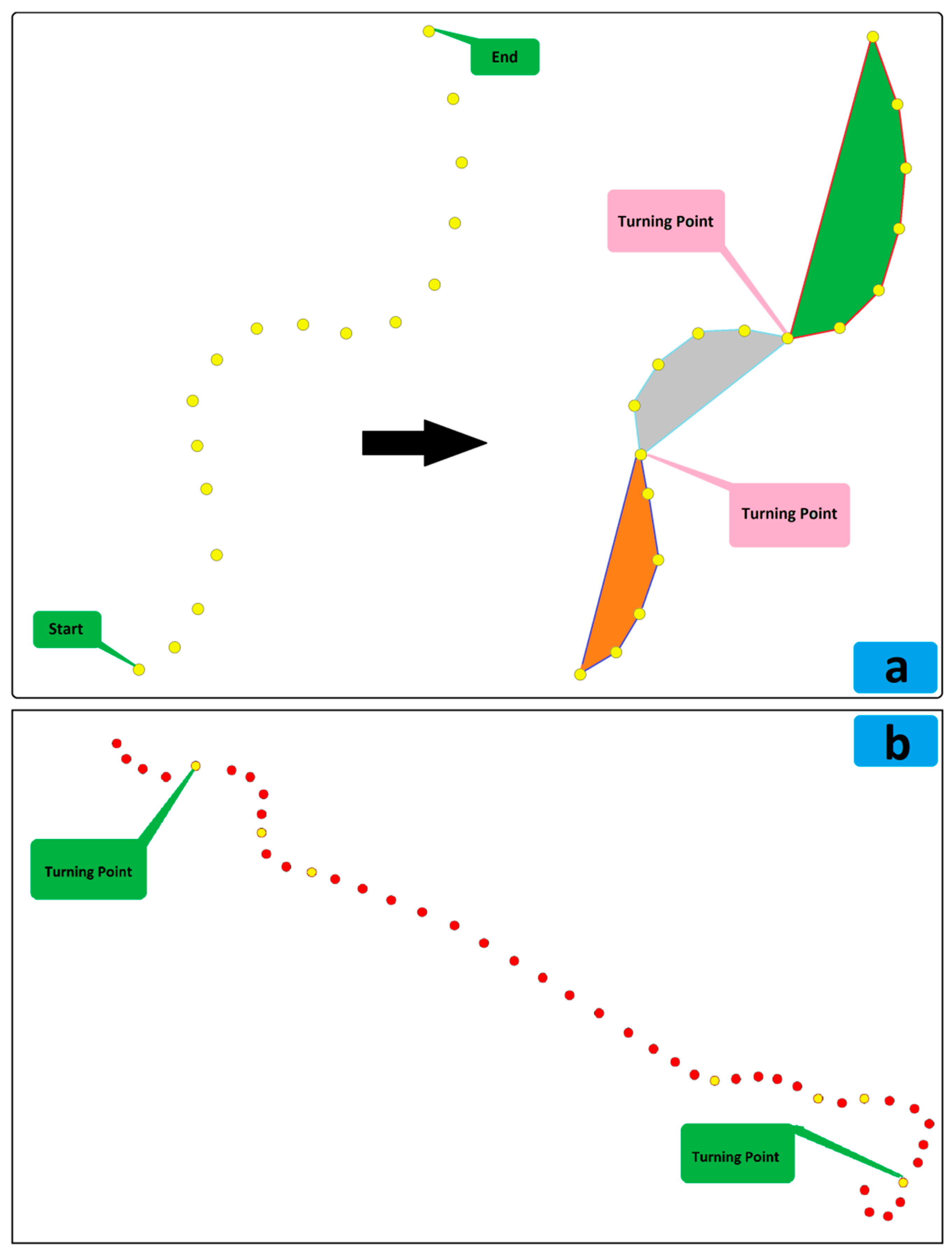
- Turning point: a turning point is considered as a changing direction point of a trajectory. For instance, a trajectory with no curve does not have any turning points, while two turning points arise for each curvature area (Figure 3).
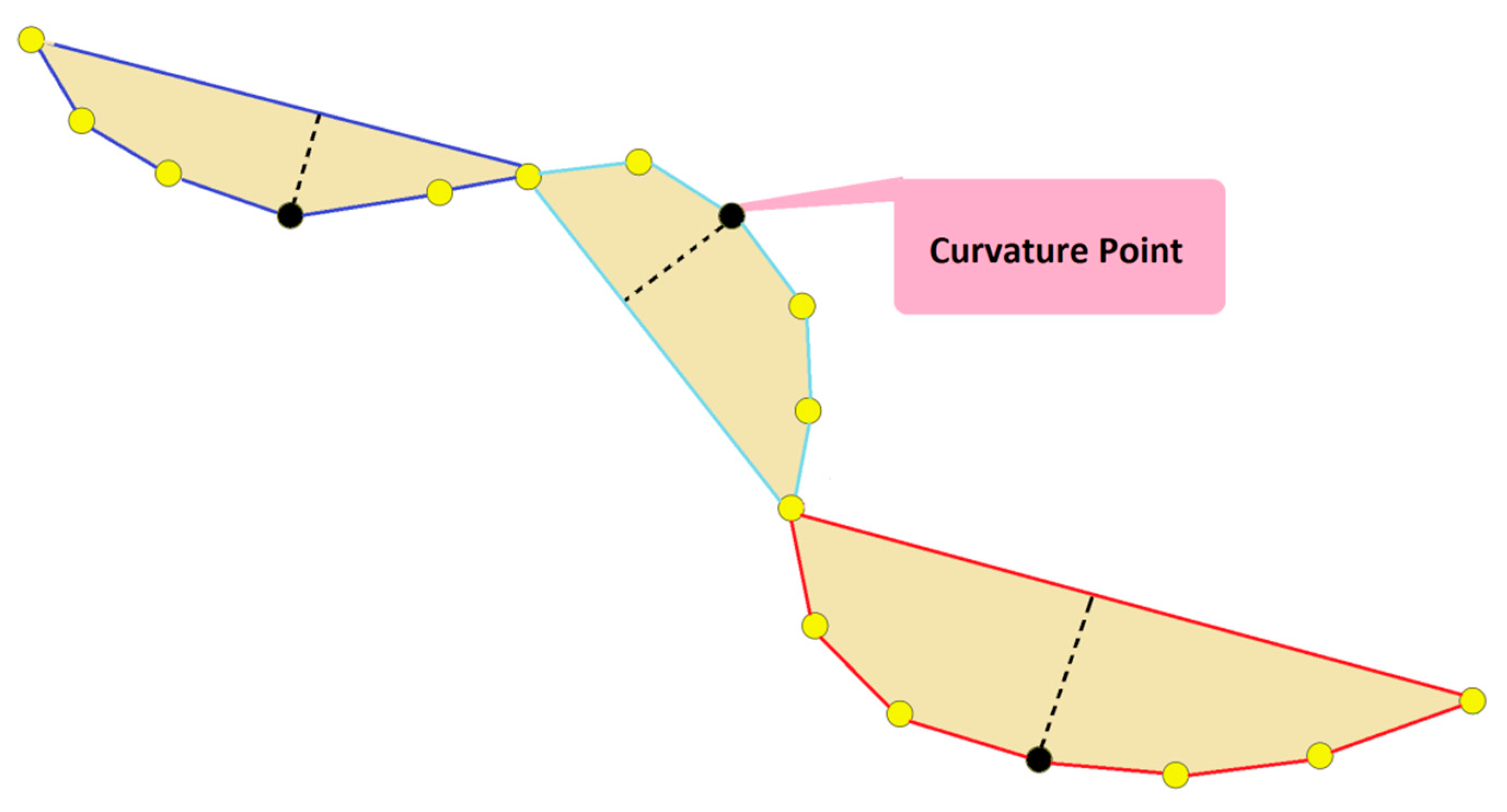
- Curvature: a curvature denotes a curve in a trajectory. Every curve has two turning points that denote the start and end of the curve, and a curvature point. A curvature can be also characterized by its length and shape (Figure 3).
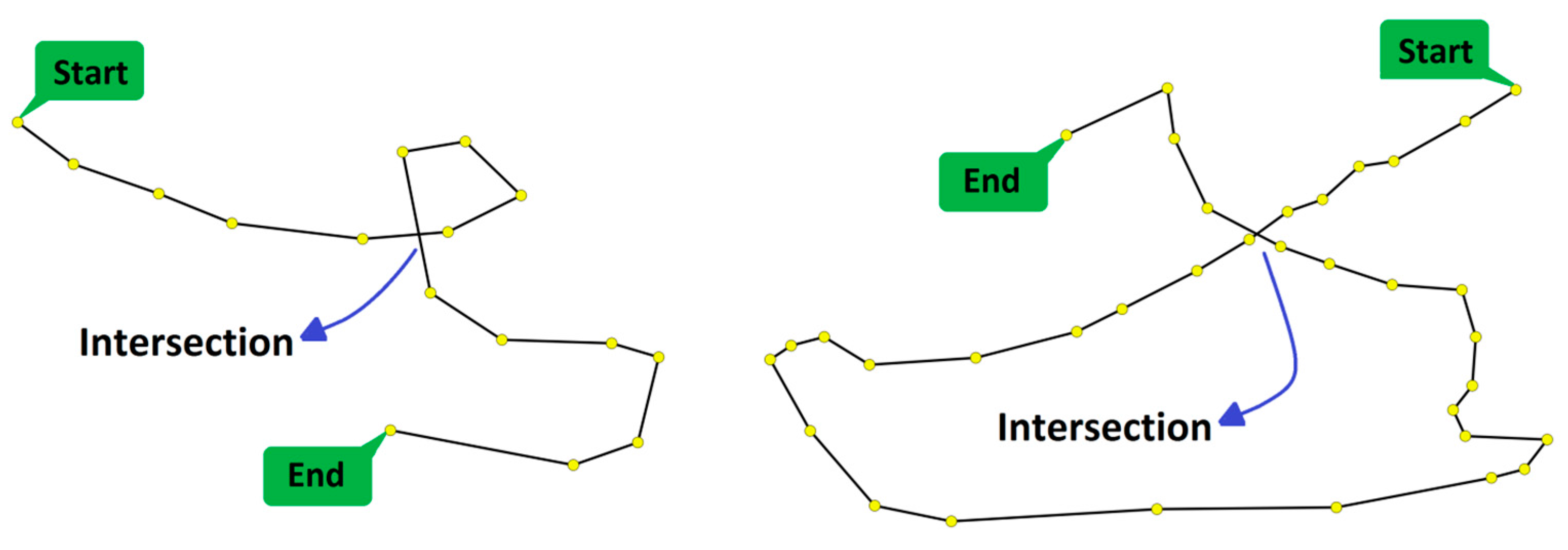
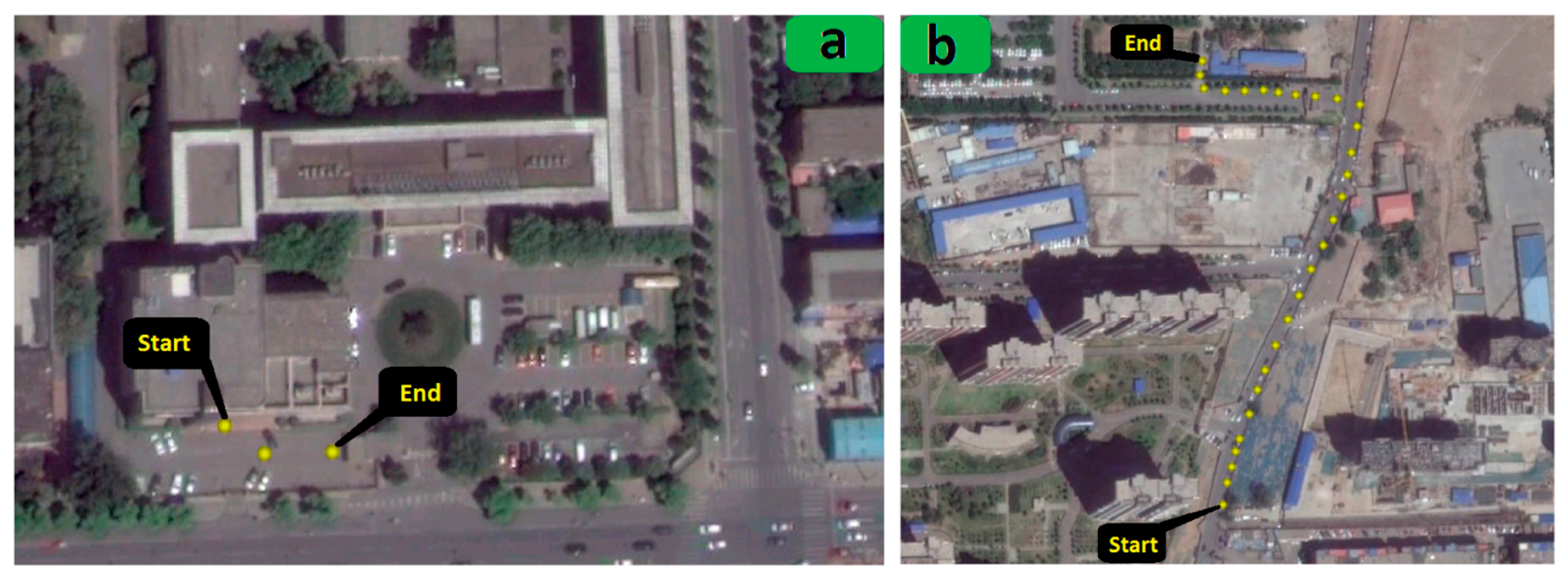
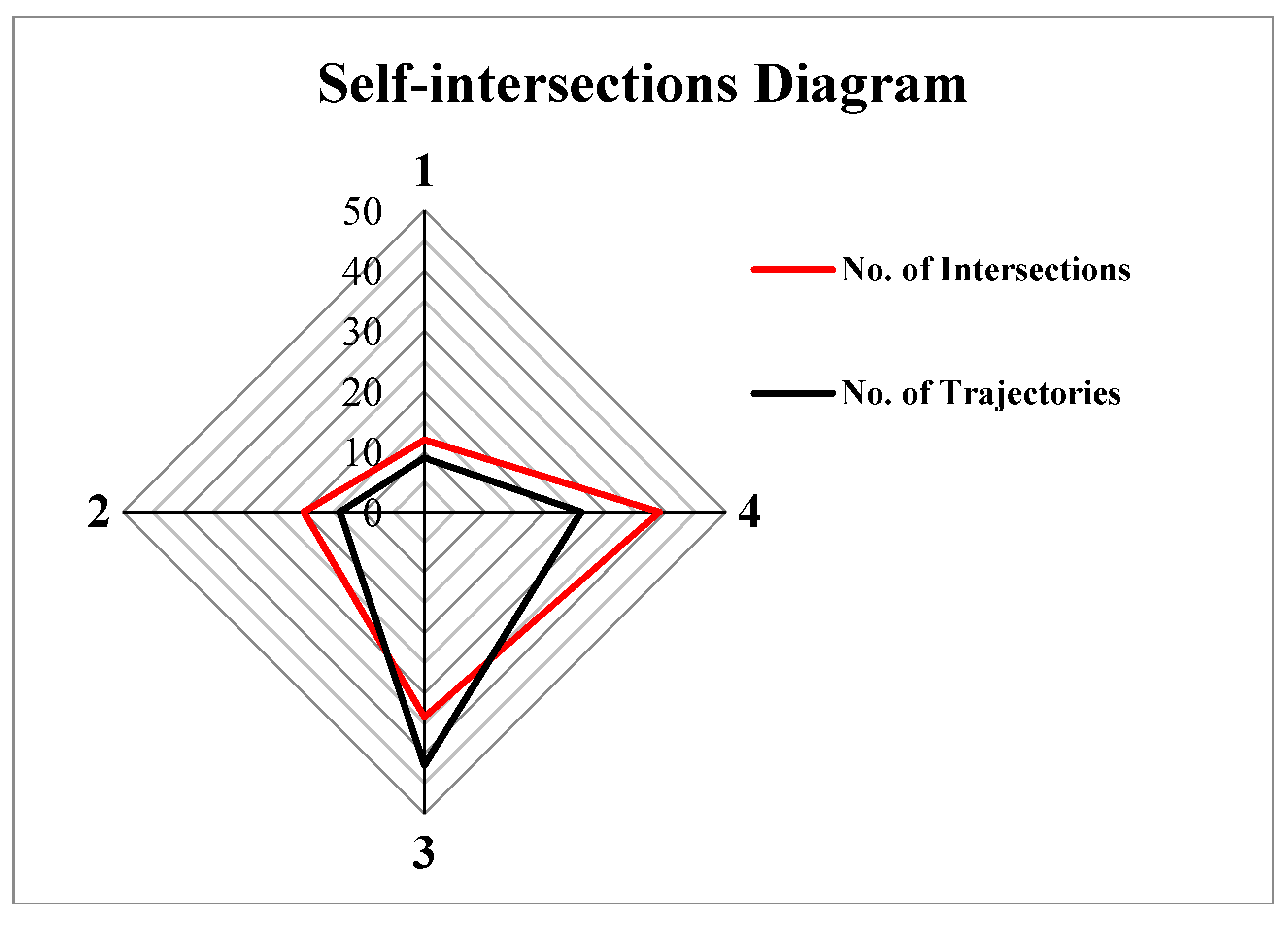
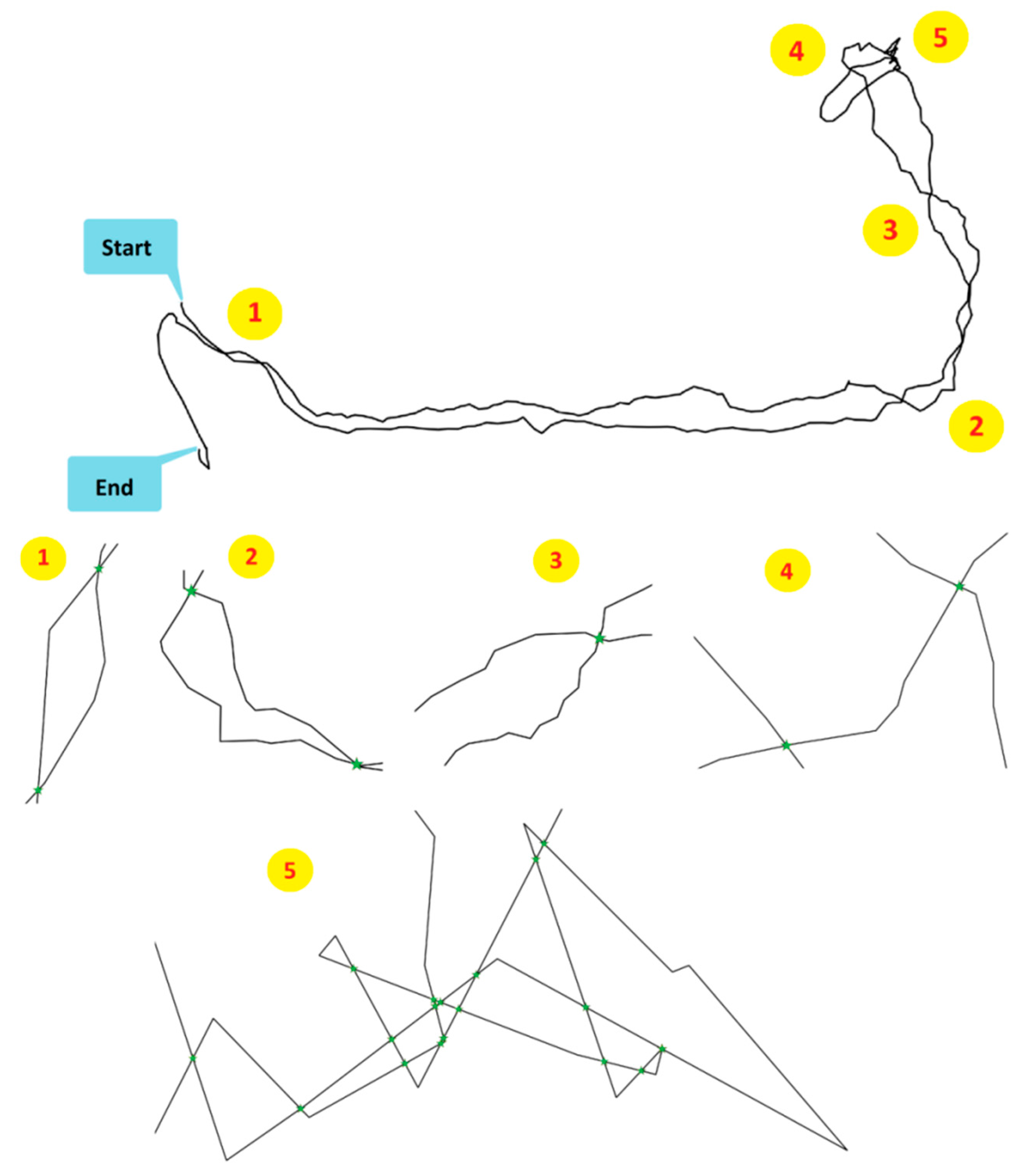
- Self-intersection point: a self-intersecting point denotes a point in the trajectories pass through at least twice. A self-interacting point is considered as a critical point as it encompasses some specific important properties: a self-intersecting point in a trajectory represents a node in the trajectory, in which the trajectory passes through twice, surely denoting the relative importance of that point. Amongst different parameters that can be considered for a self-intersecting point, the time and distance that is covered by the self-intersecting part of the trajectory can be mentioned. The role of self-intersecting trajectories has been studied in related work. For example, Keler et al. integrated 68 taxi trajectories in Shanghai to detect travel duration variety [62], while detecting 271 self-intersecting trajectories amongst 2750 intersections (Figure 4). Self-intersections are important for biological studies such as the ones applied to animal movement patterns and detection. In another related work, Bidder et al. studied horse trajectories [3], while Vrotsou et al. applied an approximation algorithm to study birds trajectories and extract movement and route patterns [63]. A few geometrical algorithms have been considered for detecting self-intersecting trajectories such as Douglas-Peucker. However, the resulting geometric simplification is not efficient enough and does not provide sufficient geometric simplification [64].
2. Algorithm Framework
2.1. Trajectory Convex Hull
2.2. Critical Points Derivation
2.2.1. Turning Points Detection
- 1.
- Conditions (2) and (3) are true for two values of j = i + 1 and s < i − 1
- 2.
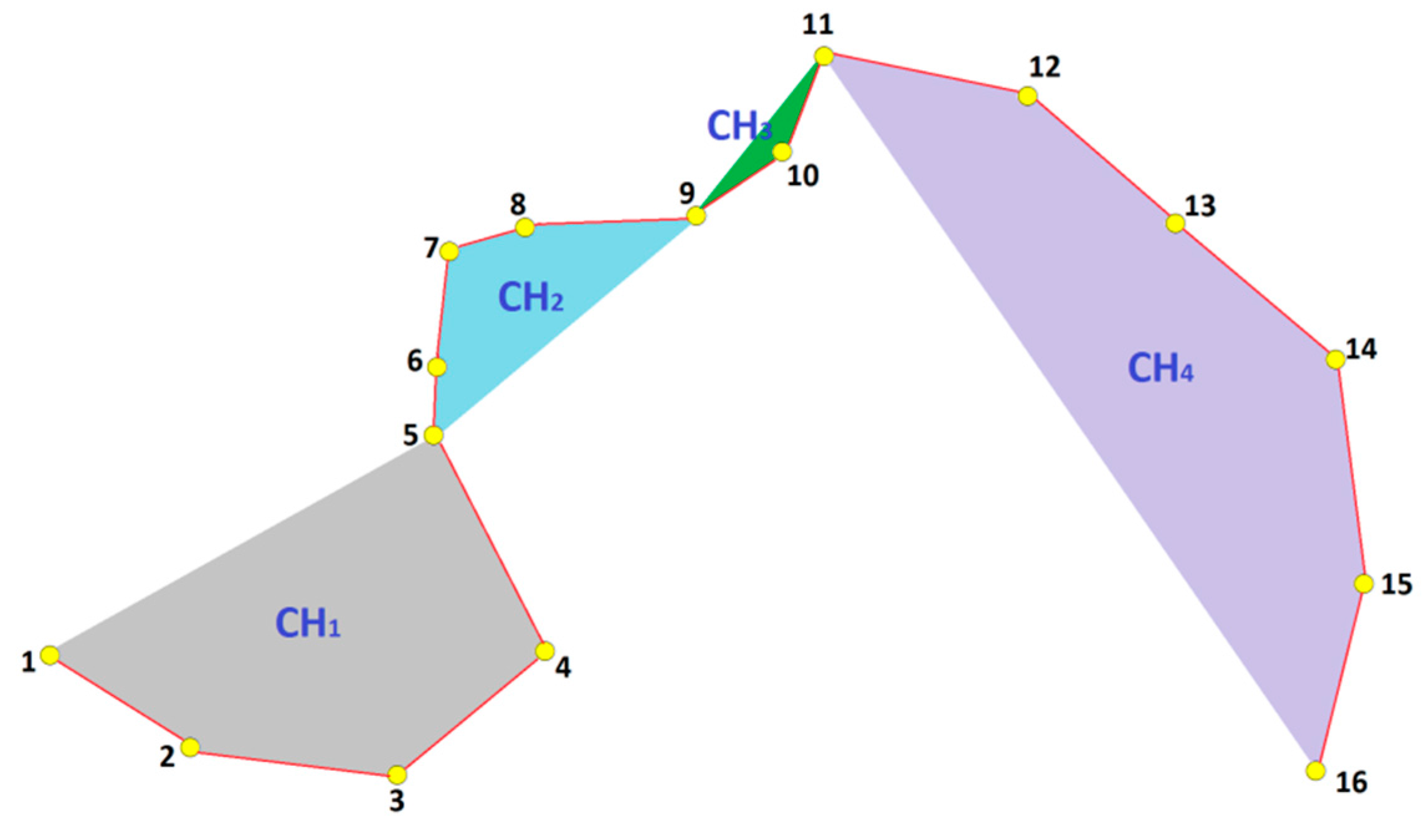
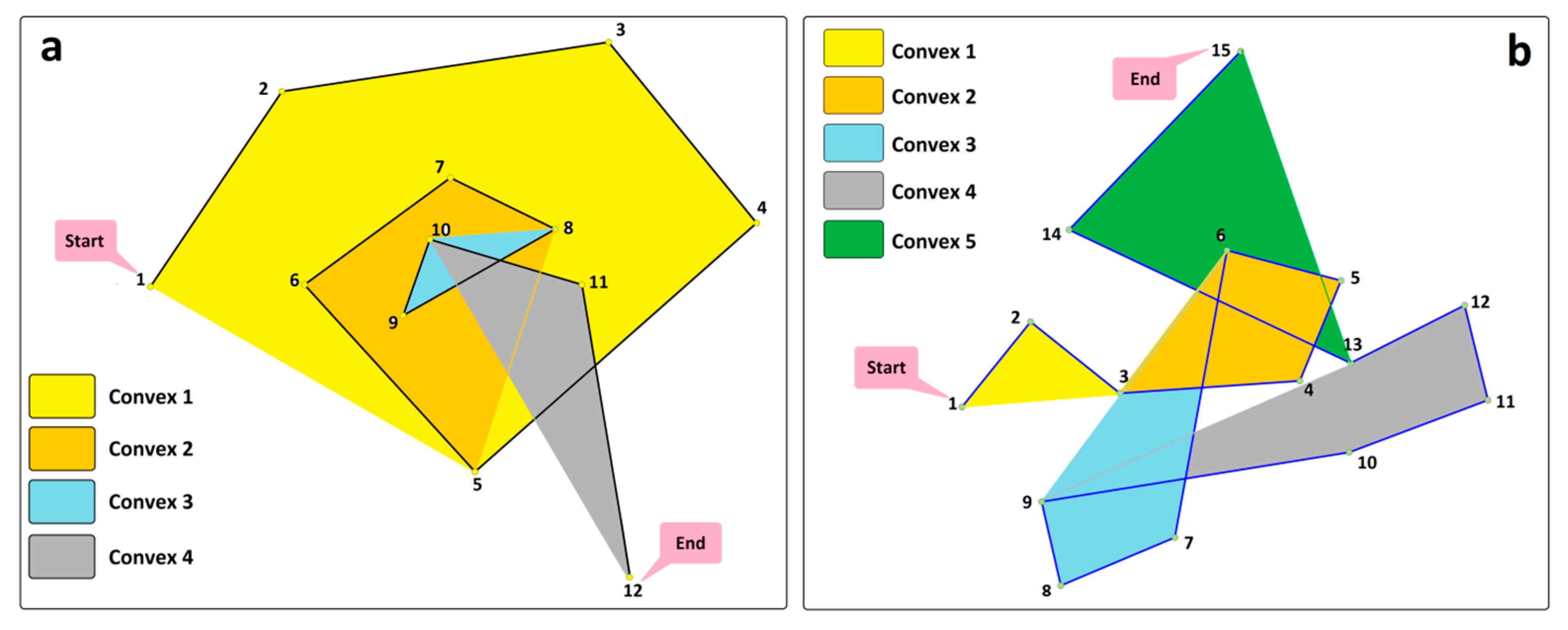
- The signs of the two values extracted from Relation (4) are same and opposite to the sign of Relation (5) for two values j and swhere and are the coordinate specifications of the point T() and same for the points s and j. Moreover, describes the distance between the connecting line of T() and T() to the point T(). Additionally, is the time difference of the points i and s. Figure 10 shows an example of trajectory with turning points. Figure 10a shows two sequential turning points, with a curvature between them. Convex hulls of a trajectory are sequentially derived as the end point of the ith convex hull is considered as the start point for the (i + 1)th convex hull. Figure 10b generalizes the case with a trajectory of seven turning points.
2.2.2. Curvature Point Detection
2.2.3. Intersection Point Detection
- 1-
- Condition 1: After derivation of convex hulls of a given trajectory, at least two convex hulls overlay.
- 2-
- Condition 2: For the points f and l that respectively denote the start and end points of the two convex hulls i and j, an intersection occurs between (fi, Ii) and (fj, Ij) if at least two edges of Ei and Ej (considering Ej є CHi and Ej є CHj) exist; that is, Ei is inside CHj and Ej is inside CHi.
3. Implementation
3.1. Detection of Curvature and Turning Points
3.2. Detection of Intersection Points
4. Conclusions
- -
- The TCP-CH method identifies critical curvature, turning and self-intersection descriptors using one common geometrical structure. In particular, we introduced a new parameter, named self-intersection, which improves the accuracy of trajectory similarity detection.
- -
- These critical points favor the generalization of derived trajectory that keeps the main and the most valuable geometrical characteristics of a given trajectory with sufficient accuracy. Overall, the TCP-CH method exhibits more than 96% of similarity when evaluating distance, area, direction, and shape parameters.
- -
- Comparison of the TCP-CH method with the turning function method—which is a common method applied for the detection of curvatures—shows more than 3% accuracy improvement when considering that the number of detected critical points is four times less than the mentioned method.
Author Contributions
Conflicts of Interest
References
- Zhao, P.; Qin, K.; Ye, X.; Wang, Y.; Chen, Y. A trajectory clustering approach based on decision graph and data field for detecting hotspots. Int. J. Geogr. Inf. Sci. 2016, 31, 1–27. [Google Scholar] [CrossRef]
- Bertrand, F.; Bouju, A.; Claramunt, C.; Devogele, T.; Ray, C. Web architecture for monitoring and visualizing mobile objects in maritime contexts. In Proceedings of the International Symposium on Web and Wireless Geographical Information Systems, Cardiff, UK, 28–29 November 2007; Springer: Berlin, Germany. [Google Scholar]
- Bidder, O.; Walker, J.; Jones, M.; Holton, M.; Urge, P.; Scantlebury, D.; Marks, N.; Magowan, E.; Maguire, I.; Wilson, R. Step by step: Reconstruction of terrestrial animal movement paths by dead-reckoning. Mov. Ecol. 2015, 3, 23. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bogorny, V.; Renso, C.; Aquino, A.R.; Lucca Siqueira, F.; Alvares, L.O. CONSTAnT—A conceptual data model for semantic trajectories of moving objects. Trans. GIS 2014, 18, 66–88. [Google Scholar] [CrossRef]
- Buchin, M.; Driemel, A.; van Kreveld, M.; Sacristán, V. Segmenting trajectories: A framework and algorithms using spatiotemporal criteria. J. Spat. Inf. Sci. 2011, 2011, 33–63. [Google Scholar]
- Sadahiro, Y.; Lay, R.; Kobayashi, T. Trajectories of moving objects on a network: Detection of similarities, visualization of relations, and classification of trajectories. Trans. GIS 2013, 17, 18–40. [Google Scholar] [CrossRef]
- Izakian, Z.; Mesgari, M.S.; Abraham, A. Automated clustering of trajectory data using a particle swarm optimization. Comput. Environ. Urban Syst. 2016, 55, 55–65. [Google Scholar] [CrossRef]
- Lu, M.; Wang, Z.; Liang, J.; Yuan, X. OD-Wheel: Visual design to explore OD patterns of a central region. In Proceedings of the 2015 IEEE Pacific Visualization Symposium (PacificVis), Hangzhou, China, 14–17 April 2015. [Google Scholar]
- Cao, H.; Mamoulis, N.; Cheung, D.W. Mining frequent spatio-temporal sequential patterns. In Proceedings of the Fifth IEEE International Conference on Data Mining, Houston, TX, USA, 27–30 November 2005. [Google Scholar]
- El Mahrsi, M.K.; Rossi, F. Graph-based approaches to clustering network-constrained trajectory data. In Proceedings of the International Workshop on New Frontiers in Mining Complex Patterns, Bristol, UK, 24 September 2012; Springer: Berlin, Germany, 2012. [Google Scholar]
- Jiang, X.; Zheng, C.; Tian, Y.; Liang, R. Large-scale taxi o/d visual analytics for understanding metropolitan human movement patterns. J. Vis. 2015, 18, 185–200. [Google Scholar] [CrossRef]
- Tang, J.; Liu, F.; Wang, Y.; Wang, H. Uncovering urban human mobility from large scale taxi GPS data. Phys. A Stat. Mech. Appl. 2015, 438, 140–153. [Google Scholar] [CrossRef]
- Hanaoka, K.; Nakaya, T.; Yano, K.; Inoue, S. Network-based spatial interpolation of commuting trajectories: Application of a university commuting management project in Kyoto, Japan. J. Transp. Geogr. 2014, 34, 274–281. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, L.; Xie, X.; Ma, W.Y. Mining interesting locations and travel sequences from GPS trajectories. In Proceedings of the 18th International Conference on World Wide Web, Madrid, Spain, 20–24 April 2009; ACM: New York, NY, USA, 2009. [Google Scholar]
- Chapleau, R.; Chu, K.K.A. Modeling transit travel patterns from location-stamped smart card data using a disaggregate approach. In Proceedings of the 11th World Conference on Transport Research, Berkeley, CA, USA, 24–28 June 2007. [Google Scholar]
- Aung, S.S.; Naing, T.T. Mining Data for Traffic Detection System Using GPS _enable Mobile Phone in Mobile Cloud Infrastructure. Int. J. Cloud Comput. Serv. Archit. 2014, 4, 1–12. [Google Scholar]
- Perttunen, M.; Kostakos, V.; Riekki, J.; Ojala, T. Urban traffic analysis through multi-modal sensing. Pers. Ubiquitous Comput. 2015, 19, 709–721. [Google Scholar] [CrossRef]
- Zheng, Y.; Chen, Y.; Li, Q.; Xie, X.; Ma, W.Y. Understanding transportation modes based on GPS data for web applications. ACM Trans. Web 2010, 4, 1. [Google Scholar] [CrossRef]
- Dodge, S.; Weibel, R.; Forootan, E. Revealing the physics of movement: Comparing the similarity of movement characteristics of different types of moving objects. Comput. Environ. Urban Syst. 2009, 33, 419–434. [Google Scholar] [CrossRef] [Green Version]
- Dodge, S.; Weibel, R.; Laube, P. Trajectory similarity analysis in movement parameter space. In Proceedings of the GIS Research UK Annual Conference, Plymouth, UK, 27–29 April 2011. [Google Scholar]
- Cao, H.; Mamoulis, N.; Cheung, D.W. Discovery of periodic patterns in spatiotemporal sequences. IEEE Trans. Knowl. Data Eng. 2007, 19, 453–467. [Google Scholar] [CrossRef]
- Lin, M.; Hsu, W.-J.; Lee, Z.Q. Predictability of individuals’ mobility with high-resolution positioning data. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; ACM: New York, NY, USA, 2012. [Google Scholar]
- Monreale, A.; Pinelli, F.; Trasarti, R.; Giannotti, F. Wherenext: A location predictor on trajectory pattern mining. In Proceedings of the 15th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Paris, France, 28 June–1 July 2009; ACM: New York, NY, USA, 2009. [Google Scholar]
- Han, J.; Dong, G.; Yin, Y. Efficient mining of partial periodic patterns in time series database. In Proceedings of the 15th IEEE International Conference on Data Engineering, Sydney, Australia, 23–26 March 1999. [Google Scholar]
- Gong, Y.; Liu, Y.; Lin, Y.; Yang, J.; Duan, Z.; Li, G. Exploring spatiotemporal characteristics of intra-urban trips using metro smartcard records. In Proceedings of the 20th IEEE International Conference on Geoinformatics, Hong Kong, China, 15–17 June 2012. [Google Scholar]
- Widhalm, P.; Yang, Y.; Ulm, M.; Athavale, S.; González, M.C. Discovering urban activity patterns in cell phone data. Transportation 2015, 42, 597–623. [Google Scholar] [CrossRef]
- Asakura, Y.; Hato, E. Tracking survey for individual travel behaviour using mobile communication instruments. Transp. Res. Part C Emerg. Technol. 2004, 12, 273–291. [Google Scholar] [CrossRef]
- Soleymani, A.; Cachat, J.; Robinson, K.; Dodge, S.; Kalueff, A.; Weibel, R. Integrating cross-scale analysis in the spatial and temporal domains for classification of behavioral movement. J. Spat. Inf. Sci. 2014, 2014, 74. [Google Scholar] [CrossRef]
- Lee, J.-G.; Han, J.; Whang, K.-Y. Trajectory clustering: A partition-and-group framework. In Proceedings of the 2007 ACM SIGMOD International Conference on Management of data, Beijing, China, 11–14 June 2007; ACM: New York, NY, USA, 2007. [Google Scholar]
- Lee, J.-G.; Han, J.; Li, X.; Cheng, H. Mining discriminative patterns for classifying trajectories on road networks. IEEE Trans. Knowl. Data Eng. 2011, 23, 713–726. [Google Scholar] [CrossRef]
- Lin, M.; Hsu, W.-J. Mining GPS data for mobility patterns: A survey. Pervasive Mob. Comput. 2014, 12, 1–16. [Google Scholar] [CrossRef]
- Morzy, M. Mining frequent trajectories of moving objects for location prediction. In Proceedings of the Machine Learning and Data Mining in Pattern Recognition, Leipzig, Germany, 18–20 July 2007; pp. 667–680. [Google Scholar]
- Lee, J.-G.; Han, J.; Li, X.; Gonzalez, H. TraClass: Trajectory classification using hierarchical region-based and trajectory-based clustering. Proc. VLDB Endow. 2008, 1, 1081–1094. [Google Scholar] [CrossRef]
- Pelekis, N.; Kopanakis, I.; Kotsifakos, E.; Frentzos, E.; Theodoridis, Y. Clustering trajectories of moving objects in an uncertain world. In Proceedings of the Ninth IEEE International Conference on Data Mining, Miami, FL, USA, 6–9 December 2009. [Google Scholar]
- Nanni, M.; Pedreschi, D. Time-focused clustering of trajectories of moving objects. J. Intell. Inf. Syst. 2006, 27, 267–289. [Google Scholar] [CrossRef]
- Hofmann, M.; Wilson, S.P.; White, P. Automated identification of linked trips at trip level using electronic fare collection data. In Proceedings of the 88th Annual Meeting on Transportation Research Board, Washington, DC, USA, 11–15 January 2009. [Google Scholar]
- Morency, C.; Trépanier, M.; Agard, B. Analysing the variability of transit users behaviour with smart card data. In Proceedings of the IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006. [Google Scholar]
- Pelletier, M.-P.; Trépanier, M.; Morency, C. Smart card data use in public transit: A literature review. Transp. Res. Part C Emerg. Technol. 2011, 19, 557–568. [Google Scholar] [CrossRef]
- Gao, S.; Liu, Y.; Wang, Y.; Ma, X. Discovering spatial interaction communities from mobile phone data. Trans. GIS 2013, 17, 463–481. [Google Scholar] [CrossRef]
- Zhang, Y.; Qin, X.; Dong, S.; Ran, B. Daily OD matrix estimation using cellular probe data. In Proceedings of the 89th Annual Meeting Transportation Research Board, Washington, DC, USA, 10–14 January 2010. [Google Scholar]
- Crandall, D.J.; Backstrom, L.; Huttenlocher, D.; Kleinberg, J. Mapping the world’s photos. In Proceedings of the 18th International Conference on World Wide Web, Madrid, Spain, 20–24 April 2009; ACM: New York, NY, USA, 2009. [Google Scholar]
- Fujisaka, T.; Lee, R.; Sumiya, K. Exploring urban characteristics using movement history of mass mobile microbloggers. In Proceedings of the Eleventh Workshop on Mobile Computing Systems and Applications, Annapolis, MD, USA, 22–23 February 2010; ACM: New York, NY, USA, 2010. [Google Scholar]
- Zhou, Y.; Fang, Z.; Thill, J.-C.; Li, Q.; Li, Y. Functionally critical locations in an urban transportation network: Identification and space–time analysis using taxi trajectories. Comput. Environ. Urban Syst. 2015, 52, 34–47. [Google Scholar] [CrossRef]
- Fang, H.; Hsu, W.-J.; Rudolph, L. Mining user position log for construction of personalized activity map. In Proceedings of the International Conference on Advanced Data Mining and Applications, Beijing, China, 17–19 August 2009; Springer: Berlin, Germany, 2009. [Google Scholar]
- Gonzalez, M.C.; Hidalgo, C.A.; Barabasi, A.-L. Understanding individual human mobility patterns. Nature 2008, 453, 779–782. [Google Scholar] [CrossRef] [PubMed]
- Ratti, C.; Frenchman, D.; Pulselli, R.M.; Williams, S. Mobile landscapes: Using location data from cell phones for urban analysis. Environ. Plan. B Plan. Des. 2006, 33, 727–748. [Google Scholar] [CrossRef]
- Brockmann, D.; Theis, F. Money circulation, trackable items, and the emergence of universal human mobility patterns. IEEE Pervasive Comput. 2008, 7. [Google Scholar] [CrossRef]
- Parent, C.; Spaccapietra, S.; Renso, C.; Andrienko, G.; Andrienko, N.; Bogorny, V.; Damiani, M.L.; Gkoulalas-Divanis, A.; Macedo, J.; Pelekis, N. Semantic trajectories modeling and analysis. ACM Comput. Surv. 2013, 45, 42. [Google Scholar] [CrossRef]
- Hornsby, K.S.; Cole, S. Modeling Moving Geospatial Objects from an Event-based Perspective. Trans. GIS 2007, 11, 555–573. [Google Scholar] [CrossRef]
- Robinson, A.C.; Peuquet, D.J.; Pezanowski, S.; Hardisty, F.A.; Swedberg, B. Design and evaluation of a geovisual analytics system for uncovering patterns in spatio-temporal event data. Cartogr. Geogr. Inf. Sci. 2017, 44, 216–228. [Google Scholar] [CrossRef]
- Bashir, F.I.; Khokhar, A.A.; Schonfeld, D. Object trajectory-based activity classification and recognition using hidden Markov models. IEEE Trans. Image Process. 2007, 16, 1912–1919. [Google Scholar] [CrossRef] [PubMed]
- Kafkafi, N.; Yekutieli, D.; Elmer, G.I. A data mining approach to in vivo classification of psychopharmacological drugs. Neuropsychopharmacology 2009, 34, 607–623. [Google Scholar] [CrossRef] [PubMed]
- Kafkafi, N.; Elmer, G. Texture of locomotor path: A replicable characterization of a complex behavioral phenotype. Genes Brain Behav. 2005, 4, 431–443. [Google Scholar] [CrossRef] [PubMed]
- Harguess, J.; Aggarwal, J. Semantic labeling of track events using time series segmentation and shape analysis. In Proceedings of the 16th IEEE International Conference on Image Processing (ICIP), Cairo, Egypt, 7–10 November 2009. [Google Scholar]
- Himberg, J.; Korpiaho, K.; Mannila, H.; Tikanmaki, J.; Toivonen, H.T. Time series segmentation for context recognition in mobile devices. In Proceedings of the IEEE International Conference on Data Mining, San Jose, CA, USA, 29 November–2 December 2001. [Google Scholar]
- Dodge, S.; Weibel, R.; Lautenschütz, A.-K. Towards a taxonomy of movement patterns. Inf. Vis. 2008, 7, 240–252. [Google Scholar] [CrossRef] [Green Version]
- Giannotti, F.; Pedreschi, D. Mobility, Data Mining and Privacy: Geographic Knowledge Discovery; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Laube, P.; Purves, R.S. How fast is a cow? cross-scale analysis of movement data. Trans. GIS 2011, 15, 401–418. [Google Scholar]
- Van Loon, E.; Sack, J.-R.; Buchin, K.; Buchin, M.; de Berg, M.; van Kreveld, M.; Gudmundsson, J.; Mountain, D. 10491 Results of the break-out group: Gulls Data. In Dagstuhl Seminar Proceedings; Schloss Dagstuhl-Leibniz-Zentrum für Informatik: Wadern, Germany, 2011. [Google Scholar]
- Wang, W.; Pan, L.; Yuan, N.; Zhang, S.; Liu, D. A comparative analysis of intra-city human mobility by taxi. Phys. A Stat. Mech. Appl. 2015, 420, 134–147. [Google Scholar] [CrossRef]
- Buchin, M.; Dodge, S.; Speckmann, B. Context-aware similarity of trajectories. In Proceedings of the International Conference on Geographic Information Science, Columbus, OH, USA, 18–21 September 2012; Springer: Berlin, Germany, 2012. [Google Scholar]
- Keler, A.; Krisp, J.M.; Ding, L. Detecting Travel Time Variations in Urban Road Networks by Taxi Trajectory Intersections. In Proceedings of the 25th GIS Research UK Conference, Manchester, UK, 18–21 May 2016. [Google Scholar]
- Buchin, K.; Buchin, M.; Van Kreveld, M.; Löffler, M.; Silveira, R.I.; Wenk, C.; Wiratma, L. Median trajectories. Algorithmica 2013, 66, 595–614. [Google Scholar] [CrossRef]
- Vrotsou, K.; Janetzko, H.; Navarra, C.; Fuchs, G.; Spretke, D.; Mansmann, F.; Andrienko, N.; Andrienko, G. SimpliFly: A methodology for simplification and thematic enhancement of trajectories. IEEE Trans. Vis. Comput. Graph. 2015, 21, 107–121. [Google Scholar] [CrossRef] [PubMed]
- Bergman, C.; Oksanen, J. Conflation of OpenStreetMap and Mobile Sports Tracking Data for Automatic Bicycle Routing. Trans. GIS 2016, 20, 848–868. [Google Scholar] [CrossRef]
- Li, Y.; Huang, Q.; Kerber, M.; Zhang, L.; Guibas, L. Large-scale joint map matching of GPS traces. In Proceedings of the 21st ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Orlando, FL, USA, 2013; ACM: New York, NY, USA, 2013. [Google Scholar]
- Javanmard, A.; Haridasan, M.; Zhang, L. Multi-track map matching. In Proceedings of the 20th International Conference on Advances in Geographic Information Systems, Redondo Beach, CA, USA, 6–9 November 2012; ACM: New York, NY, USA, 2012. [Google Scholar]
- Chehreghan, A.; Abbaspour, R.A. A geometric-based approach for road matching on multi-scale datasets using a genetic algorithm. Cartogr. Geogr. Inf. Sci. 2017, 1–15. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhou, X. Computing with Spatial Trajectories; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Lin, K.; Xu, Z.; Qiu, M.; Wang, X.; Han, T. Noise filtering, trajectory compression and trajectory segmentation on GPS data. In Proceedings of the 11th International Conference on Computer Science & Education (ICCSE), Nagoya, Japan, 23–25 August 2016. [Google Scholar]
- Grewal, M.S. Kalman Filtering; Springer: Berlin, Germany, 2011. [Google Scholar]
- Rosales, R.; Sclaroff, S. Improved tracking of multiple humans with trajectory prediction and occlusion modeling. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Workshop on the Interpretation of Visual Motion, Santa Barbara, CA, USA, 21–27 June 1998. [Google Scholar]
- O’Rourke, J. Computational Geometry in C; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Graham, R.L. An efficient algorith for determining the convex hull of a finite planar set. Inf. Process. Lett. 1972, 1, 132–133. [Google Scholar] [CrossRef]
- Zhang, X.; Lee, M.; Kim, Y.J. Interactive continuous collision detection for non-convex polyhedra. Vis. Comput. 2006, 22, 749–760. [Google Scholar] [CrossRef]
- De Berg, M.; Van Kreveld, M.; Overmars, M.; Schwarzkopf, O.C. Computational Geometry; Springer: Berlin, Germany, 2000; pp. 1–17. [Google Scholar]
- Chand, D.R.; Kapur, S.S. An algorithm for convex polytopes. J. ACM 1970, 17, 78–86. [Google Scholar] [CrossRef]
- Barber, C.B.; Dobkin, D.P.; Huhdanpaa, H. The quickhull algorithm for convex hulls. ACM Trans. Math. Softw. 1996, 22, 469–483. [Google Scholar] [CrossRef]
- Chehreghan, A.; Abbaspour, R.A. An assessment of spatial similarity degree between polylines on multi-scale, multi-source maps. Geocarto Int. 2017, 32, 471–487. [Google Scholar] [CrossRef]
- Veltkamp, R.C. Shape matching: Similarity measures and algorithms. In Proceedings of the SMI 2001 International Conference on Shape Modeling and Applications, Genova, Italy, 7–11 May 2001. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Data Used | |||
|---|---|---|---|---|
| GPS Data | Smart Card Data | Cell Phone Data | Other | |
| O-D POI detection | [8,11,12,13,14] | [15] | [16] | [17] |
| Spatio-temporal mining | [9,14,18,19,20,21,22,23,24] | [25] | [16,26,27] | [28] |
| Clustering | [29,30,31,32,33,34,35] | [36,37,38] | [39,40] | [29,41,42] |
| Graph-based | [10,43,44] | [38] | [45,46] | [47] |
| Property | Parameters | Related Work |
|---|---|---|
| Geometric | Distance | [9,10,19,27,30,31,32,34,44,45] |
| Direction | [8,16,17,18,23,27,33,34,39] | |
| Turning Angle | [19,23,28,31] | |
| Sinuosity | [16,20,28,31] | |
| Physical | Velocity | [8,18,19,27,28,44] |
| Acceleration | [18,19,20] | |
| Stop Point | [17,18,27,30,33,34,36,43] | |
| POI | [9,10,14,15,16,21,22,23,24,25,30,39,40,41,42,43,44,46,47] | |
| Context | People Attributes | [8,13,14,25,36] |
| Time of Occurrence | [11,12,15,25,29,34,37,40,42,45,46] |
| Category | Length of Trajectory | No. of Trajectories | No. of Removed Points | Variance of Distance to Fitting Line |
|---|---|---|---|---|
| 1 | 0–1000 | 56 | 63 | 3.41 |
| 2 | 1000–4000 | 82 | 235 | 7.33 |
| 3 | 4000–8000 | 127 | 1376 | 14.57 |
| 4 | 8000–15,000 | 61 | 639 | 17.20 |
| Data Specification | TCP-CH | Turning Function | |
|---|---|---|---|
| Number of Point | 73,062 | 3253 | 14,078 |
| Mean of geometric similarity (%) | - | 96.3 | 92.4 |
| Length (m) | 672,195.6 | 659,423.8 | 647,162.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hosseinpoor Milaghardan, A.; Ali Abbaspour, R.; Claramunt, C. A Geometric Framework for Detection of Critical Points in a Trajectory Using Convex Hulls. ISPRS Int. J. Geo-Inf. 2018, 7, 14. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7010014
Hosseinpoor Milaghardan A, Ali Abbaspour R, Claramunt C. A Geometric Framework for Detection of Critical Points in a Trajectory Using Convex Hulls. ISPRS International Journal of Geo-Information. 2018; 7(1):14. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7010014
Chicago/Turabian StyleHosseinpoor Milaghardan, Amin, Rahim Ali Abbaspour, and Christophe Claramunt. 2018. "A Geometric Framework for Detection of Critical Points in a Trajectory Using Convex Hulls" ISPRS International Journal of Geo-Information 7, no. 1: 14. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7010014