1. Introduction
Under the authority delegated to Fisheries and Oceans Canada under the Oceans Act, the Canadian Hydrographic Service (CHS) is responsible for providing hydrographic products and services to ensure the safe, sustainable and navigable use of Canada’s waterways. The CHS is responsible for the production and maintenance of approximately 1000 nautical charts and other hydrographic publications. With a length of over 243,700 km, Canada has the longest coastline of any country in the world [
1]. Charting Canadian waters and ensuring that all nautical products are up-to-date is thus a challenging task for the CHS. The required effort is even greater in the Canadian Arctic as the remoteness, climatic conditions and short summer season reduce opportunities to collect bathymetric data. The impact of these factors directly contributes to the sparse coverage of modern hydrographic surveys in the Arctic, which account for only 6% of Arctic waters.
To enable the organization to fill data gaps both in the Arctic and across all Canadian waters, the CHS, through a Canadian Space Agency (CSA) Government Related Initiatives Program (GRIP) project, is exploring remote sensing techniques as an alternative source of accurate and reliable hydrographic data. The datasets generated from remote sensing would directly contribute to an improvement in quality of CHS navigational charts. The project is specifically leveraging a hybrid optical/synthetic aperture radar (SAR) shoreline extraction and change detection approach, as well as optical satellite derived bathymetry (SDB) methodologies. Under the GRIP project, it was proposed to evaluate SDB techniques such as photogrammetric, empirical and classification approaches [
2]. It is highly beneficial to carry out research to improve SDB, since traditional depth extraction surveys are expensive, time consuming and contain inherent safety risks, particularly in shallow water.
While SDB has been around for over 40 years [
3], most of the development has focused on reflectance-based approaches, e.g., [
4,
5,
6,
7,
8,
9,
10]. These approaches leverage the simple fact that, as given by Beer’s law, light is attenuated as it travels through the water column. Therefore, as depth increases, the water leaving radiance (
Lw: W m
−2 μm
−1 sr
−1) decreases until optically deep waters (i.e., where
Lw has no noticeable contribution from the seafloor) are reached. Thus, a link can be created between
Lw (or reflectance from the water pixel [
Rw: unitless] if
Lw is scaled to the downwelling irradiance at the surface of the water [
Ed(0
+): W m
−2 μm
−1 sr
−1]) and depth either empirically [
4,
5,
6,
8] or through physical modeling [
7,
9,
10].
Generally, these reflectance-based approaches can extract bathymetry with ~1 m of accuracy to depths of up to 40 m in ideal conditions [
11]. However, they often struggle to retrieve bathymetric information over heterogeneous zones [
2]. This is mainly a result of areas with lower albedo being quite similar to optically deep waters. This is more problematic with approaches that seek to identify a central trend, e.g., [
4,
8], leading to an overestimation of depths over darker areas. Hence, these approaches are better tuned to perform well in homogeneous areas of high albedo substrate (e.g., sand).
Another approach to extract bathymetry from space-based Earth observation (EO) is through the analysis of wave propagation over near-shore areas (i.e., wave kinematics bathymetry: WKB). As waves travel from areas of deeper to shallower water, they interact with the seafloor and thus slow down, causing the wavelength to decrease [
12]. This principle has led to the development of several methods to infer bathymetry based on the surface signatures of currents and waves, e.g., [
13,
14,
15]. With sufficiently large waves, some of these approaches can work to about an 80 m depth, though there have been studies showing that deep ocean topography signatures can be identified under optimal conditions [
16], enabling these approaches to capture significantly deeper depths than reflectance-based approaches. While WKB is promising, there are also several drawbacks to the methodology that limit its applicability. The requirement of ideal wave conditions limits the number of usable scenes. Another more important limitation is the relative accuracy, which thus far has been found to be less than what is expected from reflectance-based bathymetry. For instance, Danilo and Melgani [
16] managed to obtain root mean square errors (RMSEs) of approximately 5 m in up to 20 m of water; Mancini et al. [
17] at best achieved results within <1 m of error for depths from 4 to 8 m, but the error grew rapidly both below and beyond that range.
This work focuses on a more recent approach for SDB: stereo photogrammetry. Likely best known for its wide use in generating digital elevation models (DEM) of the Earth’s entire landmass, e.g., [
18], only limited research has been completed to investigate the potential of stereo photogrammetry for deriving water depth, most recently by Hodul et al. [
19]. As opposed to reflectance and WKB SDB approaches, stereo photogrammetry is not sensitive to variations in the substrate reflectance or water conditions (in so far as these variations do not obstruct visibility of the seafloor). Consequently, it is of particular interest to the CHS as a valuable tool to supplement depths obtained from traditional hydrographic surveys in areas where other traditional SDB approaches are less reliable.
The main objective of this research was to examine the potential of stereoscopic approaches for bathymetry extraction using high resolution optical datasets. This paper examines the results obtained using two photogrammetric approaches: an automatic image correlation approach, and manual visual feature extraction.
3. Methods
3.1. Image Pre-Processing
As the WorldView-2 image was received in a non-orthorectified format, the geometric model was computed using the rational polynomial coefficients (RPCs) provided with the imagery. However, as the positioning accuracy, achieved using the RPCs of high-resolution satellite imagery, is limited [
25], 801 additional tie points were collected in order to obtain better relative accuracy between the images. This step also significantly improved the triangulation model, allowing for improved image matching.
Portions of the image also exhibited specular reflection (glint). This was corrected in PCI Geomatica following a method proposed by Hedley et al. [
26]. Through visual inspection, it was determined that the blue band offered the deepest sea-bottom visibility. As such, it was pansharpened to 0.5 m to allow for improved stereoscopic analysis. While the green band typically offers better penetration within coastal waters, it is possible that the clear waters of Cambridge Bay offered increased visibility in the blue band at the time of image acquisition.
3.2. Stereo Photogrammetric Methods
Stereo photogrammetry is the science of extracting 3D information from data acquired from two scenes containing a different viewing geometry. Similar to human vision, the two images are combined to create a 3D model, allowing the XYZ coordinates of features in the imagery to be determined. This study examines two approaches for stereoscopic model development: 3D manual and automatic.
Manual: With the manual approach, a photogrammetrist uses binocular vision and depth perception to extract XYZ coordinates of features in the stereo pair. Feature positions are computed through triangulation, using the geometry of the sensor. The digital photogrammetric system used for this study was SOCET GXP. This tool automatically recognizes the RPC camera model described in the satellite image metadata, adjusts the interior and exterior orientation of the image and projects them accordingly on a screen. Through visual interpretation, the photogrammetrist extracts isobaths at 1 m intervals. A triangular irregular network (TIN) is produced from the extracted isobaths and then converted into a digital surface model (DSM), with interpolation applied to generate a continuous raster surface.
Automatic: The automatic approach combines the techniques of image correlation with photogrammetric triangulation principles. Correlation coefficient methods for stereo matching were developed in the 1970s [
27], with more recent developments focusing on the generation of DSMs [
28,
29,
30]. Hirschmuller [
31] introduced the concept of a semi-global matching (SGM) algorithm. This algorithm is based on pixel-by-pixel matching of common information, an approach which is particularly useful for high resolution stereo images where pixels representing identical features can be more easily identified between pairs. This study used an SGM approach available in PCI Geomatica 2017 to automatically derive a DSM for the WorldView-2 image. The PCI SGM approach uses the techniques developed by Hirschmuller [
31,
32].
3.3. Vertical Correction
Before the stereo extracted elevation data could be compared with the in situ survey data for accuracy assessment, two corrections needed to be applied: a tidal correction and a light refraction correction.
Tidal Correction: Elevations resulting from the stereo extraction represent height relative to a model of the Earth’s ellipsoid (the World Geodetic System 1984, in this case). As the CHS survey datasets are referenced to the lowest low water at large tide (LLWLT) water level for the geographical area they cover, the stereo elevations need to be corrected to reflect this LLWLT vertical datum. To achieve this, the tide height at the time of image acquisition was determined using Fisheries and Oceans Canada tidal prediction software [
33,
34]. The tide height at the time of the WorldView-2 acquisition was 0.48 m (relative to LLWLT). Following this determination, the position of the land–water interface was identified on the image. Stereo elevations along this interface were extracted, with the median elevation calculated. The difference between the median elevation and the tide height generates a correction factor which when applied to the stereo elevation dataset, allows the elevations to be approximately relative to the LLWLT. While variations in air pressure, wind effects and wave influences likely impact the accuracy of the median elevation value, this approach represents a simple technique that should allow for reasonable accuracy at this time. Future research may be desired to identify an improved tidal correction approach to attempt to account for these additional factors.
Light Refraction Correction: Further to the tidal correction, the stereo-extracted elevations also need to be corrected for the effect of light refraction at the air–water interface. As light passes from one medium to the other, the light is refracted, causing the underwater topography to appear shallower than it is. This correction is applied following the Murase et al. [
35] method. This method was also applied successfully by Hodul et al. [
19]. The light refraction correction was only applied to the automatically extracted stereo elevation dataset; as with the manual extraction approach, the process of physically identifying corresponding pixels between the image pairs eliminates the light refraction effect.
3.4. Accuracy Assessment
The bathymetric depths estimated from the automatic and manual techniques were assessed for accuracy using the CHS survey data as a reference for comparison. The assessment was conducted by calculating the RMSE of the differences between the stereo estimated depths and the CHS survey depths at the CHS survey point locations. In addition to the overall RMSE for both approaches, RMSE values were calculated for 2 m depth ranges (e.g., 0–2 m, 2–4 m, etc.), in order to gain an understanding of the uncertainty for specific depths. Furthermore, the bias, minimum difference and maximum difference were calculated for each depth range as well as the 90% confidence level for the overall result. The 90% confidence level is of particular interest for the CHS, as the organization aims to obtain SDB estimates that are within 1 m of surveyed water depths.
For the automatic approach, RMSE calculations were only completed for depths up to 12 m, as this technique was only able to complete pixel matching up to 12 m of depth. RMSEs for the manual technique were completed up to 20 m, the greatest depth estimated using this approach.
4. Results
The analysis was divided into two main parts: (1) automatic extraction of a DSM for bathymetry, and (2) manual DSM extraction. This section presents a comparison of the DSM results obtained using both approaches.
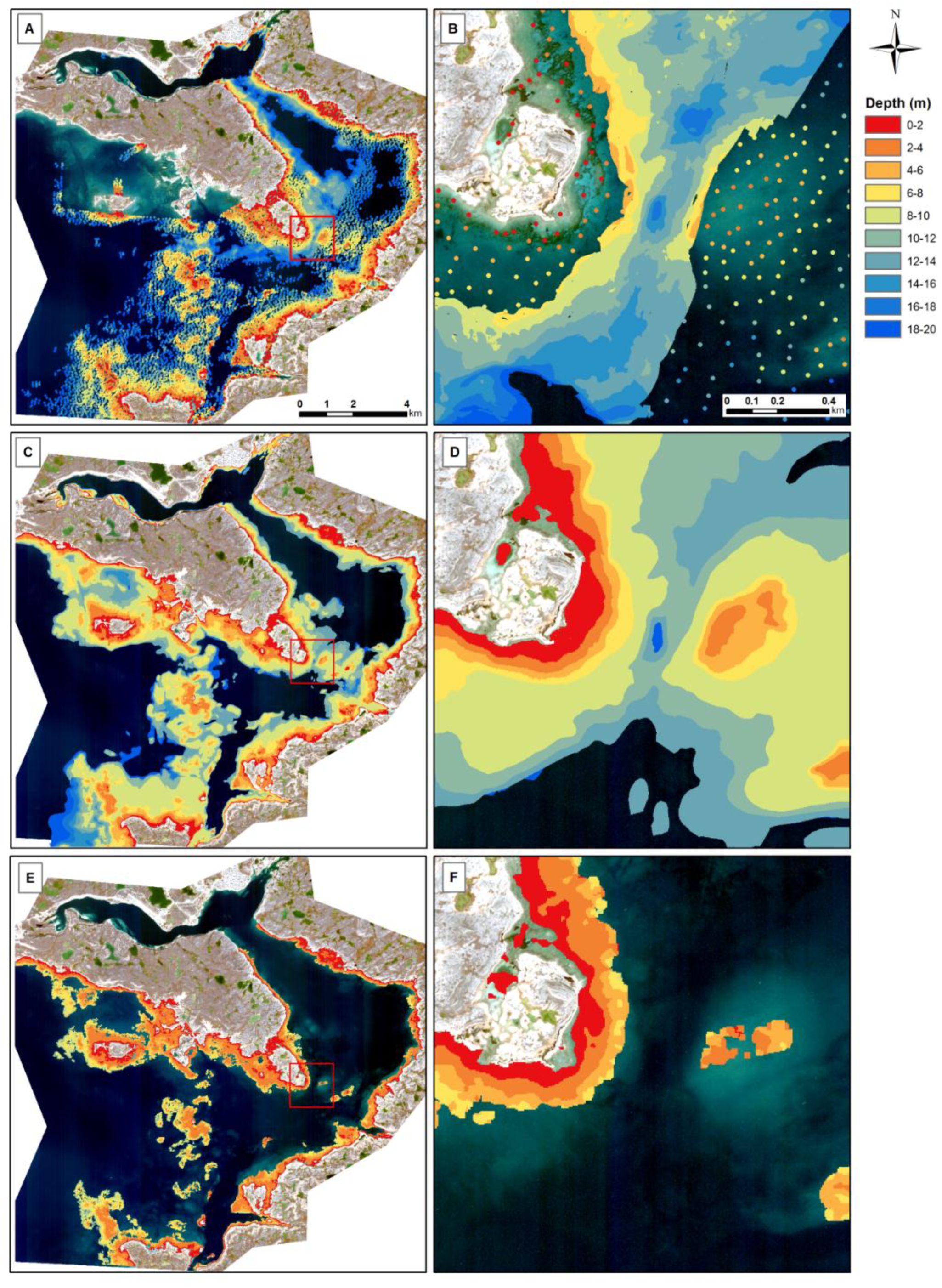
Figure 4A,C present the bathymetry results from the automatic approach. Overall, this technique was able to identify 57% of the total 0–15 m depths (relative to survey data) present within the study site. The results were found to be poor in areas containing homogeneous seabed conditions, as the lack of variation between pixels within each image prevented accurate matching for the pair.
Figure 4B,D present the bathymetry results from the manual approach. This technique allowed depths to be extracted up to 20 m, an improvement over the automatic technique. The area covered by estimated depths was also greater for this result, as the technique is not subject to limitations with regard to homogeneous bottom areas.
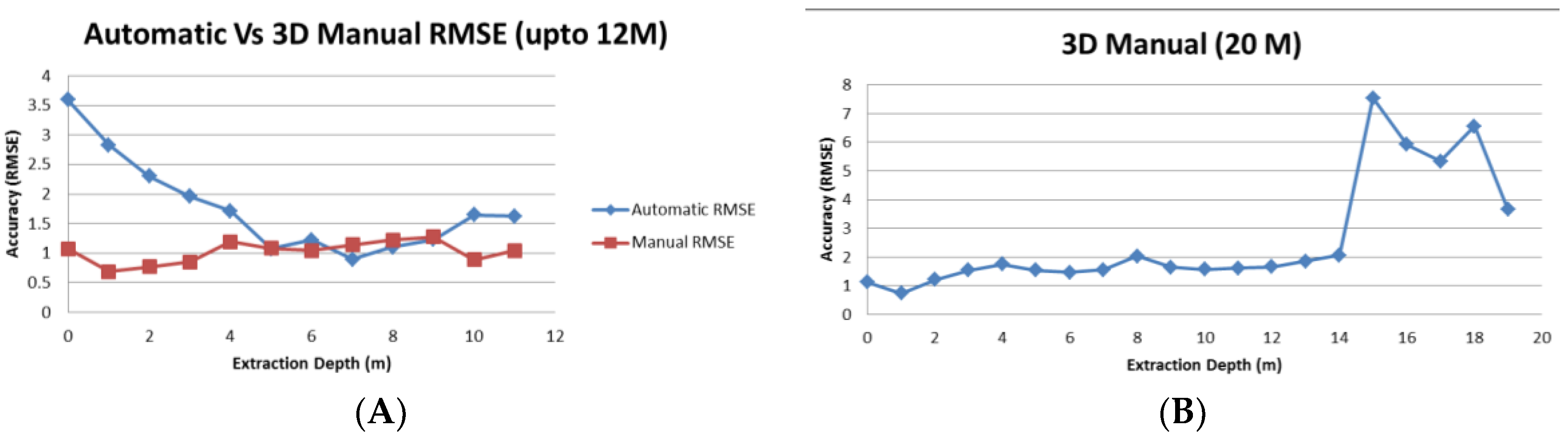
RMSE values calculated for the automatic and manual approaches (
Figure 5A and
Table 4) reveal that the manually extracted DSM showed an overall RMSE of ~1 m. The RMSE values calculated for depth ranges show the stability of the results across all depths for this approach, with a maximum RMSE of 1.88 m observed for depths of 8–10 m. In contrast, the automatically extracted DSM shows a high RMSE in shallow depths (0–4 m), with better results observed for greater depths. The 90% confidence levels were similar between the techniques, with 1.70 and 1.80 m observed for the manual and automatic approaches, respectively. Overall, the manual approach provided better accuracy for the majority of depths than the automatic approach.
The manual approach was further evaluated by considering all available survey points up to 20 m (
Figure 5B). This revealed that depths up to 14 m obtained stable results with a low RMSE (>2 m); however, for deeper waters (>15 m), high error rates were found. These results suggest that the manual approach was able to reasonably determine depths up to 14 m.
6. Conclusions
This study explored the potential of two photogrammetric techniques (automatic and 3D manual) for deriving estimates of depth within Canadian waters. Using a WorldView-2 image acquired over Cambridge Bay, Nunavut, DSMs were generated using each technique, resulting in depths being estimated accurately up to ~15 m.
An accuracy assessment completed using in situ CHS survey data showed that both approaches have the potential to estimate depth with ~1 m of error for some ranges of depth, meeting the IHO’s CATZOC C level for survey quality. In general, the 3D manual photogrammetric technique performed better than the automatic approach, achieving RMSEs of no more than 1.88 m for depths up to 12 m. However, with depths > 15 m, the manual approach was found to perform poorly, with RMSEs of more than 7 m observed for these larger depths.
While the results show the potential of both approaches for estimating depth in Canadian waters, neither technique appears to represent an ideal, single solution for estimating depth. The automatic approach, while simple and quick to apply, resulted in large uncertainties for shallow waters, limiting its effectiveness. In contrast, while the manual approach allowed depth to be estimated up to ~20 m, it contained significant errors with greater depth. The nature of the 3D manual approach also increases its costs, limiting its potential for wide area applications. Overall, a combined approach, using the advantages of each technique, may be preferred. For example, the automatic technique could initially be applied to derive depth over as many areas as possible. The 3D manual technique could then be applied to extend estimates to deeper waters and to remove gaps within the automatically extracted depths (e.g., over homogeneous depth areas).
The application of such a hybrid approach, as well as a potential combination with reflectance-based SDB techniques, presents a promising approach for gaining a more representative understanding of depth within Canadian coastal waters. Stereo photogrammetric approaches are particularly promising for application in Arctic waters, where a lack of available in situ survey data presents limitations for empirical SDB techniques. Through future work, the CHS aims to identify best practices for stereo and other bathymetry estimation techniques in order to advance the use of satellite information within navigational products.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}