Species-Level Vegetation Mapping in a Himalayan Treeline Ecotone Using Unmanned Aerial System (UAS) Imagery

 ,
,
Abstract
:
1. Introduction
2. Materials and Methods
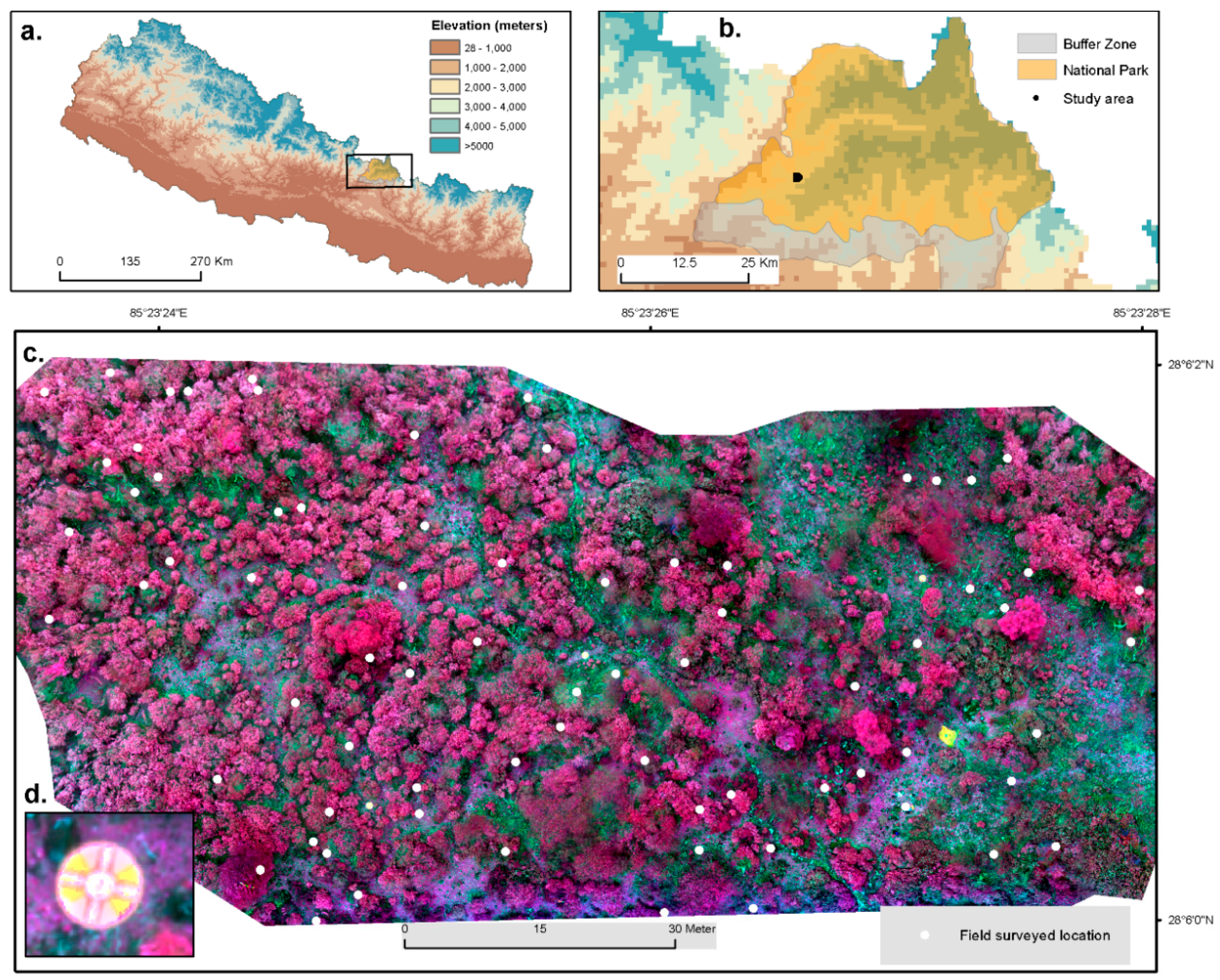
2.1. Study Area
2.2. UAS Flight Missions and Ground Control Points
2.3. Field Survey and Identifying Vegetation Classes
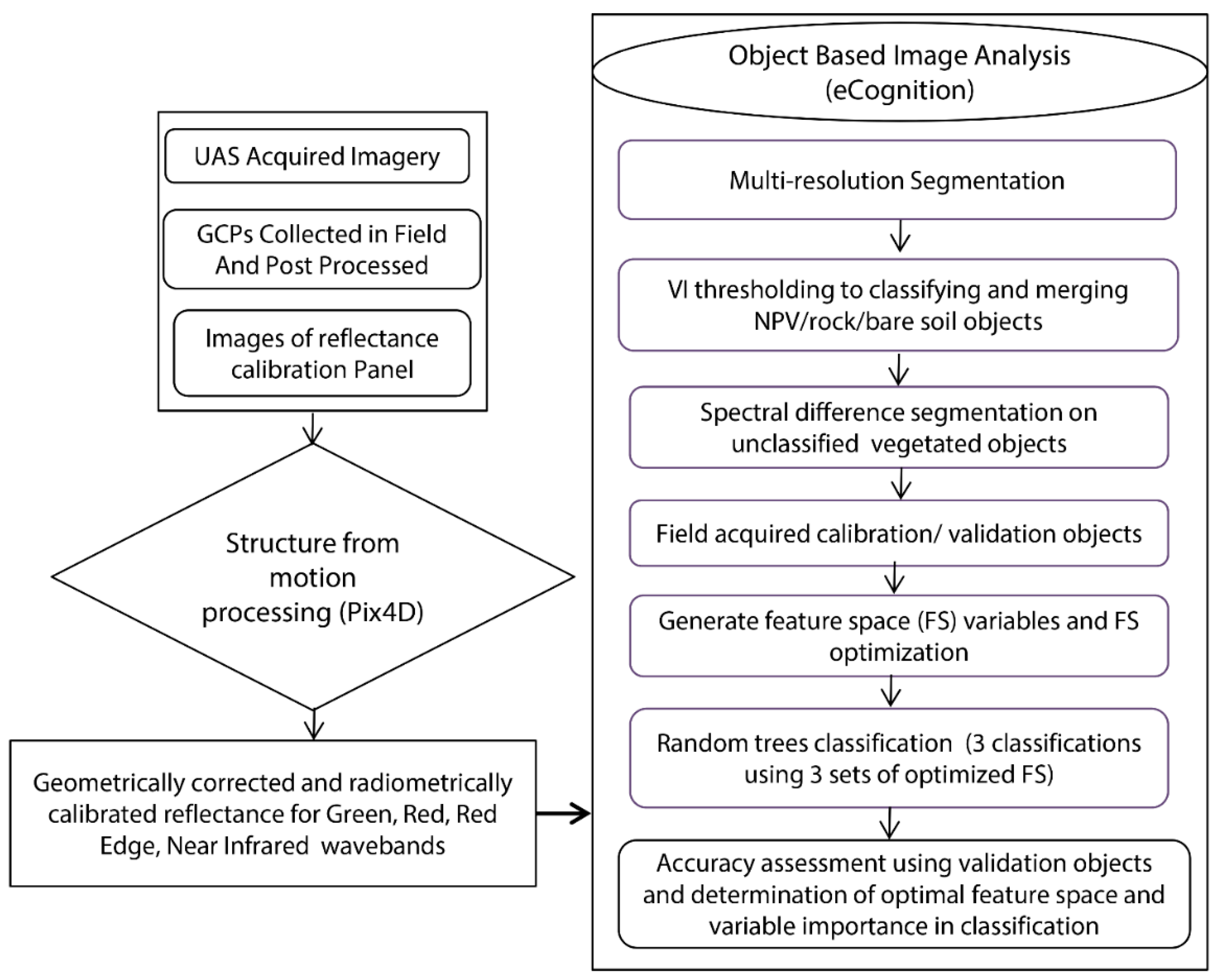
2.4. Image Processing
2.5. Geographic Object Based Image Analysis (GEOBIA)
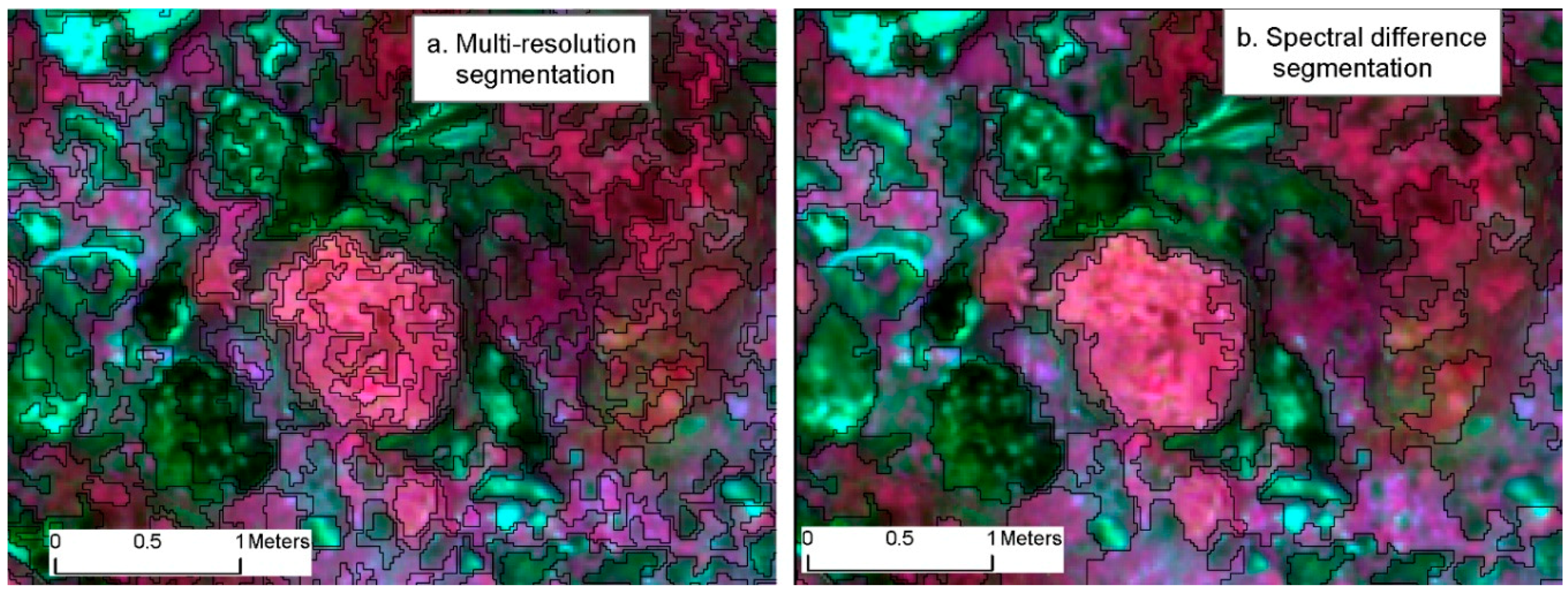
2.5.1. Segmentation and Level 1 Classification
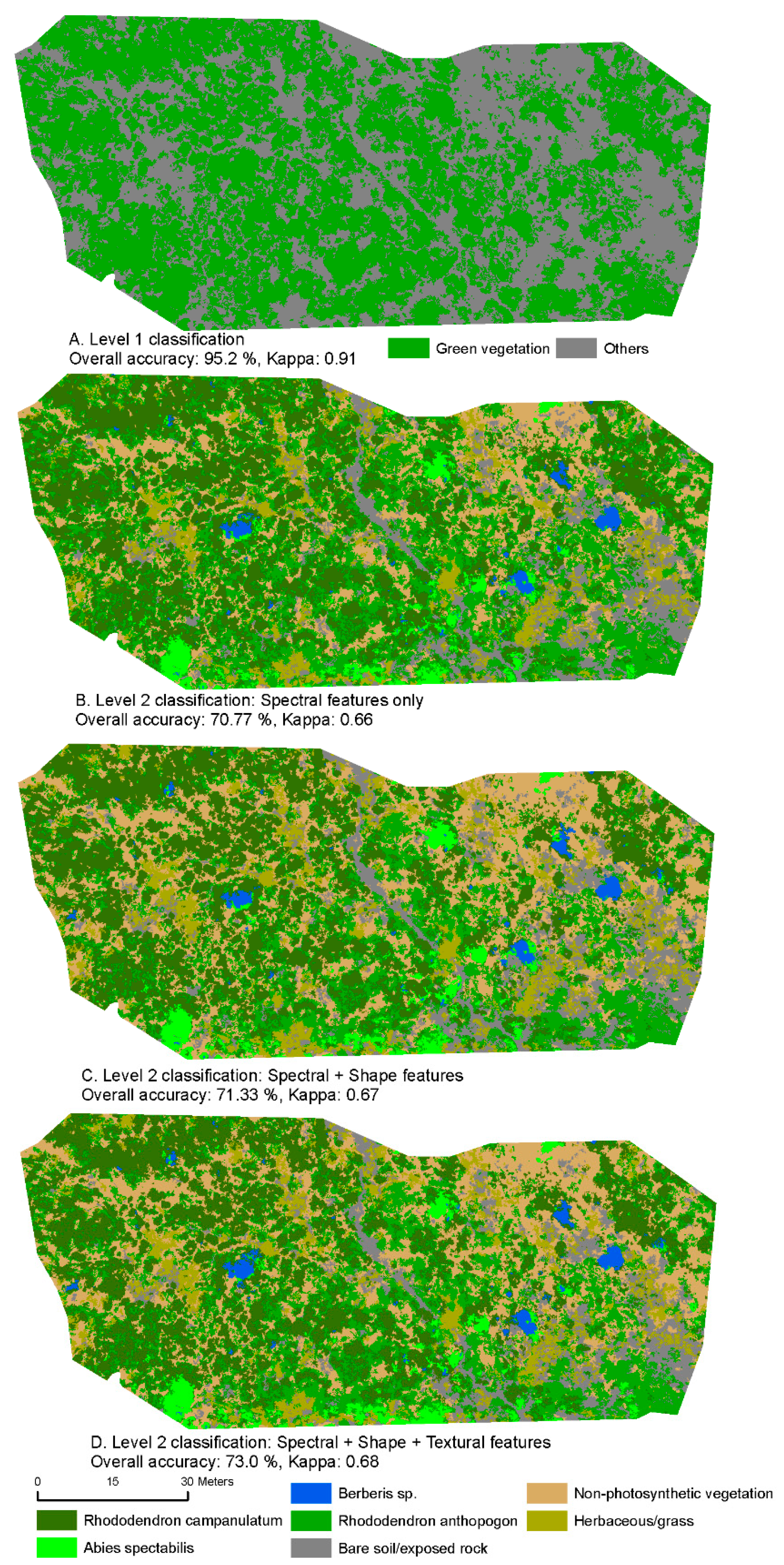
2.5.2. Feature Space Selection and Level 2 Classification
3. Results
4. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rapport, D.J. Evolution of indicators of ecosystem health. In Ecological Indicators; Springer: Berlin/Heidelberg, Germany, 1992; pp. 121–134. [Google Scholar]
- Elmqvist, T.; Folke, C.; Nyström, M.; Peterson, G.; Bengtsson, J.; Walker, B.; Norberg, J. Response diversity, ecosystem change, and resilience. Front. Ecol. Environ. 2003, 1, 488–494. [Google Scholar] [CrossRef] [Green Version]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Turner, W. Sensing biodiversity. Science 2014, 346, 301–302. [Google Scholar] [CrossRef] [PubMed]
- Kerr, J.T.; Ostrovsky, M. From space to species: Ecological applications for remote sensing. Trends Ecol. Evol. 2003, 18, 299–305. [Google Scholar] [CrossRef]
- Chawla, A.; Kumar, A.; Lal, B.; Singh, R.; Thukral, A.K. Ecological Characterization of High Altitude Himalayan Landscapes in the Upper Satluj River Watershed, Kinnaur, Himachal Pradesh, India. J. Indian Soc. Remote Sens. 2012, 40, 519–539. [Google Scholar] [CrossRef]
- Munsi, M.; Areendran, G.; Ghosh, A.; Joshi, P. Landscape characterisation of the forests of Himalayan foothills. J. Indian Soc. Remote Sens. 2010, 38, 441–452. [Google Scholar] [CrossRef]
- Mishra, N.B.; Mainali, K.P. Greening and browning of the Himalaya: Spatial patterns and the role of climatic change and human drivers. Sci. Total Environ. 2017, 587, 326–339. [Google Scholar] [CrossRef] [PubMed]
- Lele, N.; Joshi, P. Analyzing deforestation rates, spatial forest cover changes and identifying critical areas of forest cover changes in North-East India during 1972–1999. Environ. Monit. Assess. 2009, 156, 159. [Google Scholar] [CrossRef] [PubMed]
- Qamer, F.M.; Shehzad, K.; Abbas, S.; Murthy, M.; Xi, C.; Gilani, H.; Bajracharya, B. Mapping deforestation and forest degradation patterns in western Himalaya, Pakistan. Remote Sens. 2016, 8, 385. [Google Scholar] [CrossRef]
- Krishnaswamy, J.; John, R.; Joseph, S. Consistent response of vegetation dynamics to recent climate change in tropical mountain regions. Glob. Chang. Biol. 2014, 20, 203–215. [Google Scholar] [CrossRef] [PubMed]
- Chakraborty, A.; Sachdeva, K.; Joshi, P. Mapping long-term land use and land cover change in the central Himalayan region using a tree-based ensemble classification approach. Appl. Geogr. 2016, 74, 136–150. [Google Scholar] [CrossRef]
- Gilani, H.; Shrestha, H.L.; Murthy, M.; Phuntso, P.; Pradhan, S.; Bajracharya, B.; Shrestha, B. Decadal land cover change dynamics in Bhutan. J. Environ. Manag. 2015, 148, 91–100. [Google Scholar] [CrossRef] [PubMed]
- Uddin, K.; Shrestha, H.L.; Murthy, M.; Bajracharya, B.; Shrestha, B.; Gilani, H.; Pradhan, S.; Dangol, B. Development of 2010 national land cover database for the Nepal. J. Environ. Manag. 2015, 148, 82–90. [Google Scholar] [CrossRef] [PubMed]
- Niklas, K.J.; Midgley, J.J.; Rand, R.H. Tree size frequency distributions, plant density, age and community disturbance. Ecol. Lett. 2003, 6, 405–411. [Google Scholar] [CrossRef]
- Sundriyal, R.; Sharma, E.; Rai, L.; Rai, S. Tree structure, regeneration and woody biomass removal in a sub-tropical forest of Mamlay watershed in the Sikkim Himalaya. Vegetatio 1994, 113, 53–63. [Google Scholar] [CrossRef]
- Gairola, S.; Sharma, C.; Ghildiyal, S.; Suyal, S. Regeneration dynamics of dominant tree species along an altitudinal gradient in moist temperate valley slopes of the Garhwal Himalaya. J. For. Res. 2012, 23, 53–63. [Google Scholar] [CrossRef]
- Gairola, S.; Procheş, Ş.; Rocchini, D. High-resolution satellite remote sensing: A new frontier for biodiversity exploration in Indian Himalayan forests. Int. J. Remote Sens. 2013, 34, 2006–2022. [Google Scholar] [CrossRef]
- Li, D.; Ke, Y.; Gong, H.; Li, X. Object-based urban tree species classification using bi-temporal WorldView-2 and WorldView-3 images. Remote Sens. 2015, 7, 16917–16937. [Google Scholar] [CrossRef]
- Ghosh, A.; Joshi, P. A comparison of selected classification algorithms for mapping bamboo patches in lower Gangetic plains using very high resolution WorldView 2 imagery. Int. J. Appl. Earth Observ. Geoinf. 2014, 26, 298–311. [Google Scholar] [CrossRef]
- Yan, J.; Zhou, W.; Han, L.; Qian, Y. Mapping vegetation functional types in urban areas with WorldView-2 imagery: Integrating object-based classification with phenology. Urban For. Urban Green. 2018, 31, 230–240. [Google Scholar] [CrossRef]
- Van Deventer, H.; Cho, M.; Mutanga, O. Improving the classification of six evergreen subtropical tree species with multi-season data from leaf spectra simulated to WorldView-2 and RapidEye. Int. J. Remote Sens. 2017, 38, 4804–4830. [Google Scholar] [CrossRef]
- Shi, P.; Wu, N. The timberline ecotone in the Himalayan region: An ecological review. In High-Altitude Rangelands and Their Interfaces in the Hindu Kush Himalayas; International Centre for Integrated Mountain Development: Patan, Nepal, 2013; Volume 108. [Google Scholar]
- Liang, E.; Wang, Y.; Piao, S.; Lu, X.; Camarero, J.J.; Zhu, H.; Zhu, L.; Ellison, A.M.; Ciais, P.; Peñuelas, J. Species interactions slow warming-induced upward shifts of treelines on the Tibetan Plateau. Proc. Natl. Acad. Sci. USA 2016, 113, 4380–4385. [Google Scholar] [CrossRef] [PubMed]
- Schickhoff, U.; Bobrowski, M.; Böhner, J.; Bürzle, B.; Chaudhary, R.; Gerlitz, L.; Heyken, H.; Lange, J.; Müller, M.; Scholten, T. Do Himalayan treelines respond to recent climate change? An evaluation of sensitivity indicators. Earth Syst. Dyn. 2015, 6. [Google Scholar] [CrossRef]
- Chhetri, P.K. Use of High Resolution DigitalGlobe Satellite Imagery to Map the Alpine Treeline Ecotone of the Nepal Himalaya. Digit. Glob Funadation 2015. [Google Scholar]
- Körner, C. Plant adaptation to cold climates. F1000Research 2016, 5. [Google Scholar] [CrossRef] [PubMed]
- Asner, G.P.; Knapp, D.E.; Boardman, J.; Green, R.O.; Kennedy-Bowdoin, T.; Eastwood, M.; Martin, R.E.; Anderson, C.; Field, C.B. Carnegie Airborne Observatory-2: Increasing science data dimensionality via high-fidelity multi-sensor fusion. Remote Sens. Environ. 2012, 124, 454–465. [Google Scholar] [CrossRef]
- Ghosh, A.; Fassnacht, F.E.; Joshi, P.; Koch, B. A framework for mapping tree species combining hyperspectral and LiDAR data: Role of selected classifiers and sensor across three spatial scales. Int. J. Appl. Earth Observ. Geoinf. 2014, 26, 49–63. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-based photogrammetry and hyperspectral imaging for mapping bark beetle damage at tree-level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Capolupo, A.; Kooistra, L.; Berendonk, C.; Boccia, L.; Suomalainen, J. Estimating plant traits of grasslands from UAV-acquired hyperspectral images: A comparison of statistical approaches. ISPRS Int. J. Geo-Inf. 2015, 4, 2792–2820. [Google Scholar] [CrossRef]
- Chen, G.; Weng, Q.; Hay, G.J.; He, Y. Geographic Object-based Image Analysis (GEOBIA): Emerging trends and future opportunities. GISci. Remote Sens. 2018, 55, 159–182. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; Van der Meer, F.; Van der Werff, H.; Van Coillie, F. Geographic object-based image analysis–towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed]
- Mishra, N.B.; Crews, K.A. Mapping vegetation morphology types in a dry savanna ecosystem: Integrating hierarchical object-based image analysis with Random Forest. Int. J. Remote Sens. 2014, 35, 1175–1198. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Franklin, S.E.; Ahmed, O.S. Deciduous tree species classification using object-based analysis and machine learning with unmanned aerial vehicle multispectral data. Int. J. Remote Sens. 2017. [Google Scholar] [CrossRef]
- Komárek, J.; Klouček, T.; Prošek, J. The potential of Unmanned Aerial Systems: A tool towards precision classification of hard-to-distinguish vegetation types? Int. J. Appl. Earth Observ. Geoinf. 2018, 71, 9–19. [Google Scholar] [CrossRef]
- Oldeland, J.; Große-Stoltenberg, A.; Naftal, L.; Strohbach, B. The potential of UAV derived image features for discriminating savannah tree species. In The Roles of Remote Sensing in Nature Conservation; Springer: Berlin/Heidelberg, Germany, 2017; pp. 183–201. [Google Scholar]
- Lu, B.; He, Y. Species classification using Unmanned Aerial Vehicle (UAV)-acquired high spatial resolution imagery in a heterogeneous grassland. ISPRS J. Photogramm. Remote Sens. 2017, 128, 73–85. [Google Scholar] [CrossRef]
- Kachamba, D.J.; Ørka, H.O.; Næsset, E.; Eid, T.; Gobakken, T. Influence of plot size on efficiency of biomass estimates in inventories of dry tropical forests assisted by photogrammetric data from an unmanned aircraft system. Remote Sens. 2017, 9, 610. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Kumar, R. UAVs as remote sensing platform in glaciology: Present applications and future prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- MicaSense, Inc. Available online: https://www.micasense.com/parrotsequoia/ (accessed on 11 October 2017).
- Gaira, K.S.; Rawal, R.S.; Rawat, B.; Bhatt, I.D. Impact of climate change on the flowering of Rhododendron arboreum in central Himalaya, India. Curr. Sci. 2014, 106, 1735–1738. [Google Scholar]
- Hart, R.; Salick, J.; Ranjitkar, S.; Xu, J. Herbarium specimens show contrasting phenological responses to Himalayan climate. Proc. Natl. Acad. Sci. USA 2014, 201403376. [Google Scholar] [CrossRef] [PubMed]
- Gaire, N.; Dhakal, Y.; Lekhak, H.; Bhuju, D.; Shah, S. Vegetation dynamics in treeline ecotone of Langtang National Park, Central Nepal. Nepal J. Sci. Technol. 2010, 11, 107–114. [Google Scholar] [CrossRef]
- Assmann, J.J.; Kerby, J.T.; Cunliffe, A.M.; Myers-Smith, I.H. Vegetation monitoring using multispectral sensors-best practices and lessons learned from high latitudes. bioRxiv 2018, 334730. [Google Scholar] [CrossRef]
- Trimble. Trimble GeoXH 6000 User Guide. Available online: https://tinyurl.com/ybkgjj33 (accessed on 23 January 2018).
- Rao, K. GAGAN-The Indian satellite based augmentation system. India J. Raio Space Phys. 2007, 36, 293–304. [Google Scholar]
- Pix4D. Pix4D Mapper User Manual. Available online: https://support.pix4d.com/hc/en-us/articles/204272989-Offline-Getting-Started-and-Manual-pdf- (accessed on 2 October 2017).
- eCognition Developer, T. 9.0 User Guide; Trimble Germany GmbH: Munich, Germany, 2014.
- Mikeš, S.; Haindl, M.; Scarpa, G.; Gaetano, R. Benchmarking of remote sensing segmentation methods. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 2240–2248. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 3, 610–621. [Google Scholar] [CrossRef]
- Laliberte, A.; Browning, D.; Herrick, J.; Gronemeyer, P. Hierarchical object-based classification of ultra-high-resolution digital mapping camera (DMC) imagery for rangeland mapping and assessment. J. Spat. Sci. 2010, 55, 101–115. [Google Scholar] [CrossRef]
- Mishra, N.B. Characterizing Ecosystem Structural and Functional Properties in the Central Kalahari Using Multi-Scale Remote Sensing. Ph.D. Thesis, The University of Texas at Austin, Austin, TX, USA, 2014. [Google Scholar]
- Ranjitkar, S.; Kindt, R.; Sujakhu, N.M.; Hart, R.; Guo, W.; Yang, X.; Shrestha, K.K.; Xu, J.; Luedeling, E. Separation of the bioclimatic spaces of Himalayan tree rhododendron species predicted by ensemble suitability models. Glob. Ecol. Conserv. 2014, 1, 2–12. [Google Scholar] [CrossRef]
- Kumar, P. Assessment of impact of climate change on Rhododendrons in Sikkim Himalayas using Maxent modelling: Limitations and challenges. Biodivers. Conserv. 2012, 21, 1251–1266. [Google Scholar] [CrossRef]
- MicaSense, Inc. RedEdge M User Manual. Available online: https://support.micasense.com/hc/en-us/articles/115003537673-RedEdge-M-User-Manual-PDF- (accessed on 14 February 2018).
- BirdsEyeView. FifeFly 6 Pro User Manaul. 2017. Available online: https://tinyurl.com/y8qpsgso (accessed on 28 May 2018).
- Gao, H.; Tang, Y.; Jing, L.; Li, H.; Ding, H. A Novel Unsupervised Segmentation Quality Evaluation Method for Remote Sensing Images. Sensors 2017, 17, 2427. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera Properties | Values |
|---|---|
| Wavelength bands/central wavelength | Green (550 nm), Red (660 nm), Red Edge (735 nm), NIR (790 nm) |
| Focal length | 4.0 mm |
| Image resolution | 1280 × 960 pixels |
| Imager size | 4.8 mm × 3.6 mm |
| Horizontal FOV | 61.9° |
| Vertical FOV | 48.5° |
| Radiometric resolution/format | 12 bit/TIFF |
| Flying height | 30 m (above ground level) |
| Resulting GSD | 1.8 cm |
| Study area considered in 2 flights | 0.81 ha |
| Feature | Description |
|---|---|
| Mean layer value | The mean value represents the mean brightness of an image object within a single band |
| Standard deviation | The standard deviation of all pixels which form an image object within a band |
| Spectral indices | Normalized Difference Vegetation Index (NDVI) calculated as (NIR-red)/(NIR + red); Green Index (GI) calculated as (NIR-green)/(NIR + green); Red Edge Index (REI) calculated as (NIR-red edge)/(NIR + red edge) |
| Maximum difference | Minimum mean value of an object subtracted from its maximum value. The means of all bands belonging to an object are compared with each other and the result is divided by the brightness [50]. |
| Shape | Border index: Describes how jagged an image object is, the more jagged, the higher its border index. Shape Index: a measure of overall shape complexity and it is calculated from the border length feature of the image object divided by four times the square root of its area [50]. |
| Texture after Haralick | GLCM (grey level co-occurrence matrix) calculated after Haralick, Shanmugam, and Dinstein [53] describes how different combinations of pixel values occur within an object; used features (using the mean of all layers). |
| Spectral | Shape | Texture |
|---|---|---|
| Mean Green 1,2 | Asymmetry | GLCM homogeneity 3 |
| Mean Red 1,2,3 | Border Index 2 | GLCM contrast |
| Mean Red edge 3 | Compactness | GLCM dissimilarity 3 |
| Mean NIR 1,2,3 | Rectangular fit | GLCM entropy 3 |
| Standard deviation Green 1,2,3 | Roundness | GLCM angular 2nd moment |
| Standard deviation Red 1,2,3 | Shape Index 2,3 | GLCM mean 3 |
| Standard deviation Red edge | Density | GLCM Standard deviation |
| Standard deviation NIR 1,2,3 | GLCM correlation | |
| Maximum difference 2,3 | ||
| Mean NDVI 1,2,3 | ||
| Mean GI | ||
| Mean REI 1,3 | ||
| Standard deviation NDVI 1,2,3 | ||
| Standard deviation GI 1 | ||
| Standard deviation REI 1,2,3 |
| Cover Type | Green Vegetation | Others | Total | Producer’s Accuracy (1-Omission Error) |
|---|---|---|---|---|
| Green vegetation | 95 | 3 | 98 | 97% |
| Others | 4 | 44 | 48 | 92% |
| Total | 99 | 47 | 146 | - |
| User’s accuracy (1-comission error) | 96% | 94% | - | 95.2% |
| Cover Type | Rhodo Camp. | Rhodo Antho. | Berberis sp. | Abies Spec. | Grass | NPV | Bare Soil/Rock | Total | Producer’s Accuracy |
|---|---|---|---|---|---|---|---|---|---|
| Rhodo camp. | 41 | 8 | 1 | 0 | 0 | 1 | 0 | 51 | 80% |
| Rhodo antha. | 5 | 32 | 2 | 0 | 6 | 5 | 2 | 52 | 57% |
| Berberis sp. | 1 | 0 | 5 | 0 | 1 | 2 | 0 | 9 | 55% |
| Abies spec. | 1 | 0 | 0 | 6 | 0 | 1 | 0 | 8 | 75% |
| Grass | 0 | 2 | 1 | 0 | 15 | 3 | 0 | 21 | 71% |
| NPV | 0 | 3 | 0 | 0 | 1 | 29 | 3 | 36 | 80% |
| Bare soil/rock | 0 | 3 | 0 | 0 | 1 | 1 | 18 | 23 | 78% |
| Total | 48 | 48 | 9 | 6 | 24 | 42 | 23 | 146 | - |
| User’s accuracy | 85% | 66% | 55% | 100% | 62% | 69% | 78% | - | 73% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mishra, N.B.; Mainali, K.P.; Shrestha, B.B.; Radenz, J.; Karki, D. Species-Level Vegetation Mapping in a Himalayan Treeline Ecotone Using Unmanned Aerial System (UAS) Imagery. ISPRS Int. J. Geo-Inf. 2018, 7, 445. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7110445
Mishra NB, Mainali KP, Shrestha BB, Radenz J, Karki D. Species-Level Vegetation Mapping in a Himalayan Treeline Ecotone Using Unmanned Aerial System (UAS) Imagery. ISPRS International Journal of Geo-Information. 2018; 7(11):445. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7110445
Chicago/Turabian StyleMishra, Niti B., Kumar P. Mainali, Bharat B. Shrestha, Jackson Radenz, and Debendra Karki. 2018. "Species-Level Vegetation Mapping in a Himalayan Treeline Ecotone Using Unmanned Aerial System (UAS) Imagery" ISPRS International Journal of Geo-Information 7, no. 11: 445. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7110445