A Heterogeneous Distributed Virtual Geographic Environment—Potential Application in Spatiotemporal Behavior Experiments

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background
1.2. Related Works
2. HDVGE Conceptual Framework
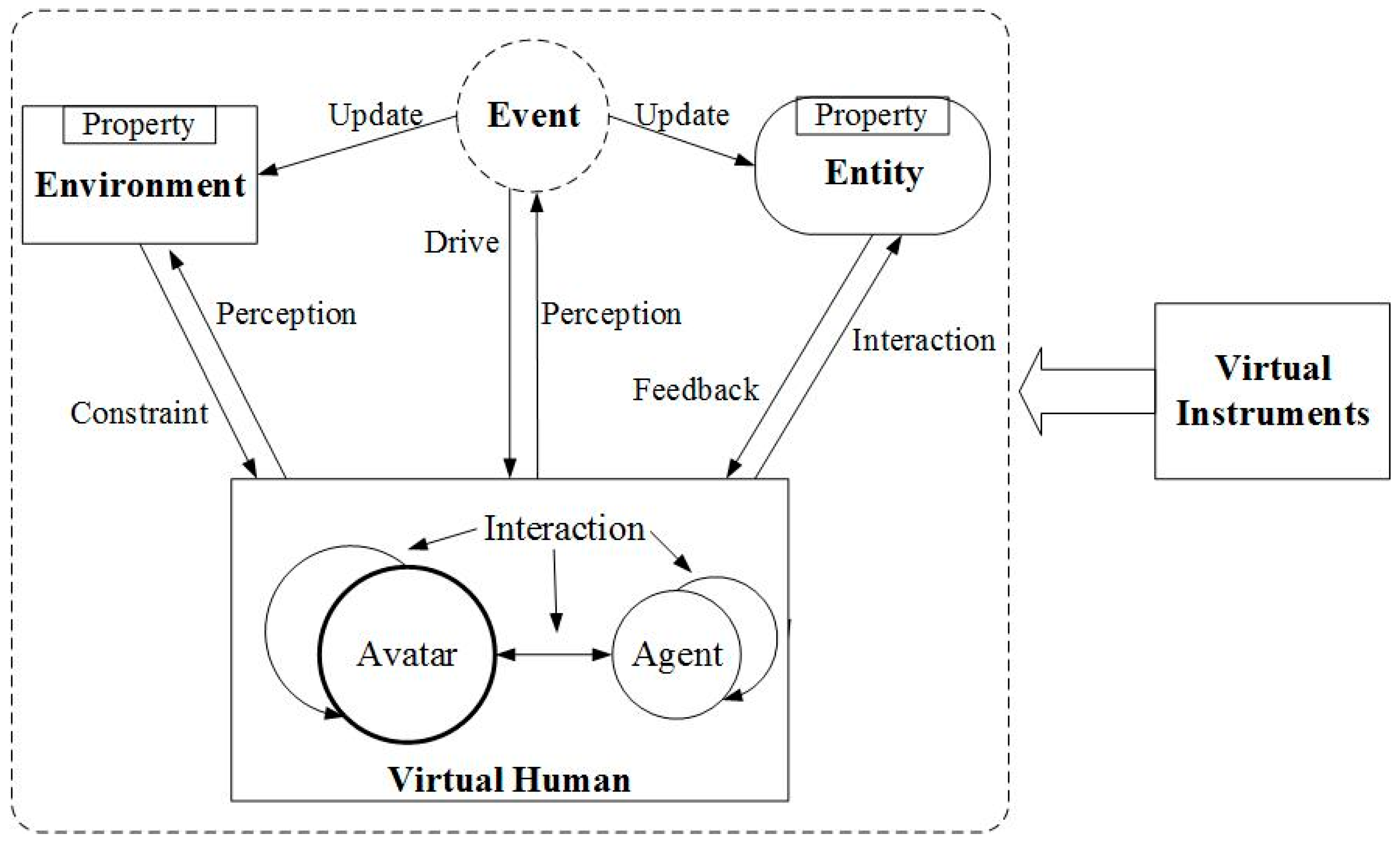
2.1. Conceptual Framework
- Virtual Human: HDVGE regards the human as the core, and emphasizes the subjectivity of human beings. The virtual human in the HDVGE includes avatars controlled by real users, and agents driven by computer programs. They can interact with other elements as well as themselves, such as interactions between avatars or avatars and agents. Multiple virtual human form a group through social relations, roles, and tasks. Massive groups in collective activities form a crowd.
- Environment: The environment is the background of the VGEx, and is the static part of the VGE. We mainly use 3D models to simulate the real geographical environment, including terrain, vegetation, architecture, etc., which constitute the physical part of the VGE. Similar to the real environment, it can be perceived and recognized. At the same time, different environments will constrain a virtual human’s behaviors.
- Entity: Entity refers to the dynamic variable entities in VGE. They have the ability to interact with humans. They can not only be perceived by humans, they can also provide feedback to the humans. For example, small obstacles in the evacuation process, such as desks and chairs, can affect the route choice of virtual humans; meanwhile, their state variables can also be changed by the humans. An essential issue in HDVGE is how the consistency of entity state variables in heterogeneous clients can be maintained.
2.2. HDVGE Design Principles
- Similarity in geographic space–time: The time and space in VGE should be similar to that in the real geographic environment (RGE). That is, the spatial scale and time scale in VGE should be identical to the real ones. This similarity provides principles for modeling the 3D virtual environment and process simulation. It requires strict reference to the size and proportion of real space when modeling VGE. Additionally, the time scale of the VGE cannot be changed.
- Similarity in spatial attributes: The spatial attributes and distributions of entities and processes in the VGE should be similar to that in the RGE. VGEx includes the simulation of processes in natural geography and human geography. This principle stipulates that the modeling and presentation of objects and geographic processes should be similar to reality.
- Similarity in group composition: Through the observation of pedestrians in public places [39], at least 70% of pedestrians in a given population are not traveling alone, but walk in groups. In a VGEx for spatiotemporal behavior research, group composition and member attributes must be similar to reality. Due to the limitations of the 3D modeling, VGEx cannot provide every user with an elaborate avatar. We use avatar models that are easy to discern to represent the members of the group, while those who are outside the group use an avatar with a different appearance. This similarity provides the basis for group modeling, observation, record, and analysis.
- Similarity in perception: The subject of a VGEx perceives the environment, entities, other subjects’ spatiotemporal positions, attributes, and group relations from a first-person perspective. The results of this perception process should be similar to the perception results of a RGE. For example, during a fire, the subjects’ perceptions of the evacuating crowd, and their own companions in the VGEx, should be similar to those in an actual fire environment. This similarity could stimulate the subject to behave similarly to reality. Therefore, this similarity provides the framework and principles for virtual scene design, process simulation, and interactions between multiple subjects.
3. HDVGE Architecture and Key Technologies
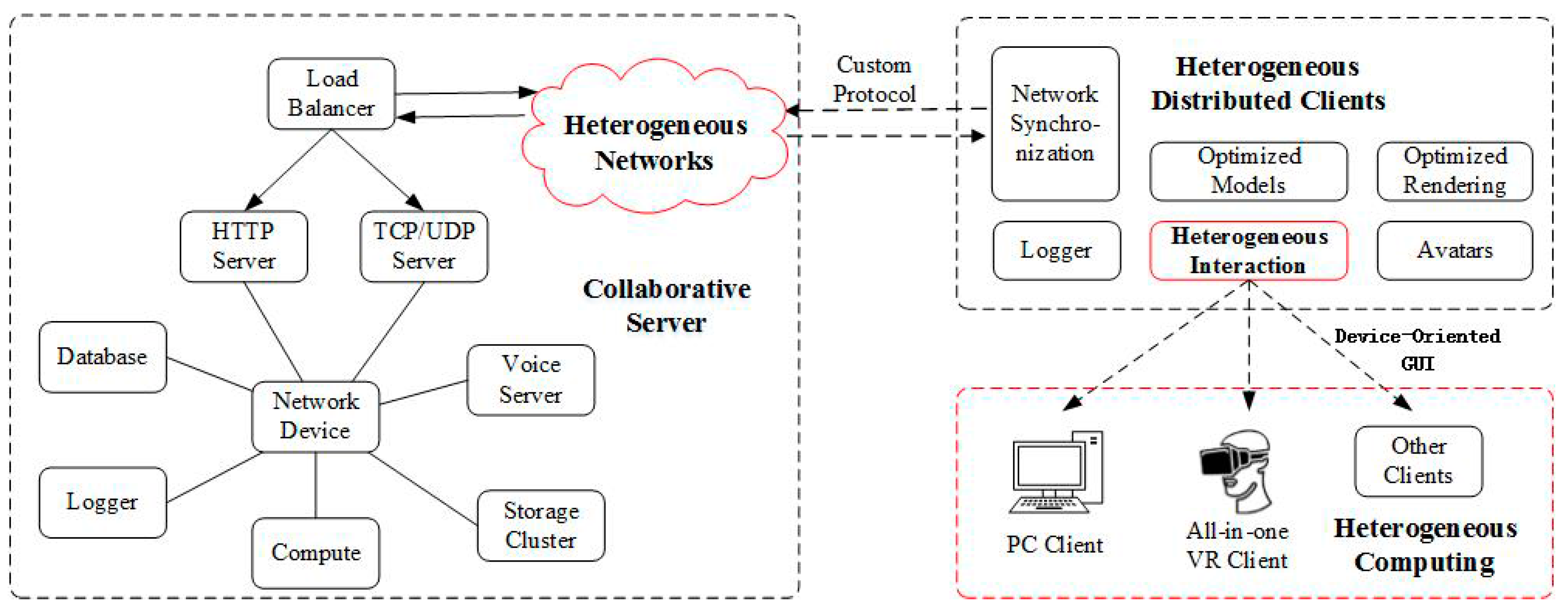
3.1. HDVGE Architecture
3.2. Key Technologies
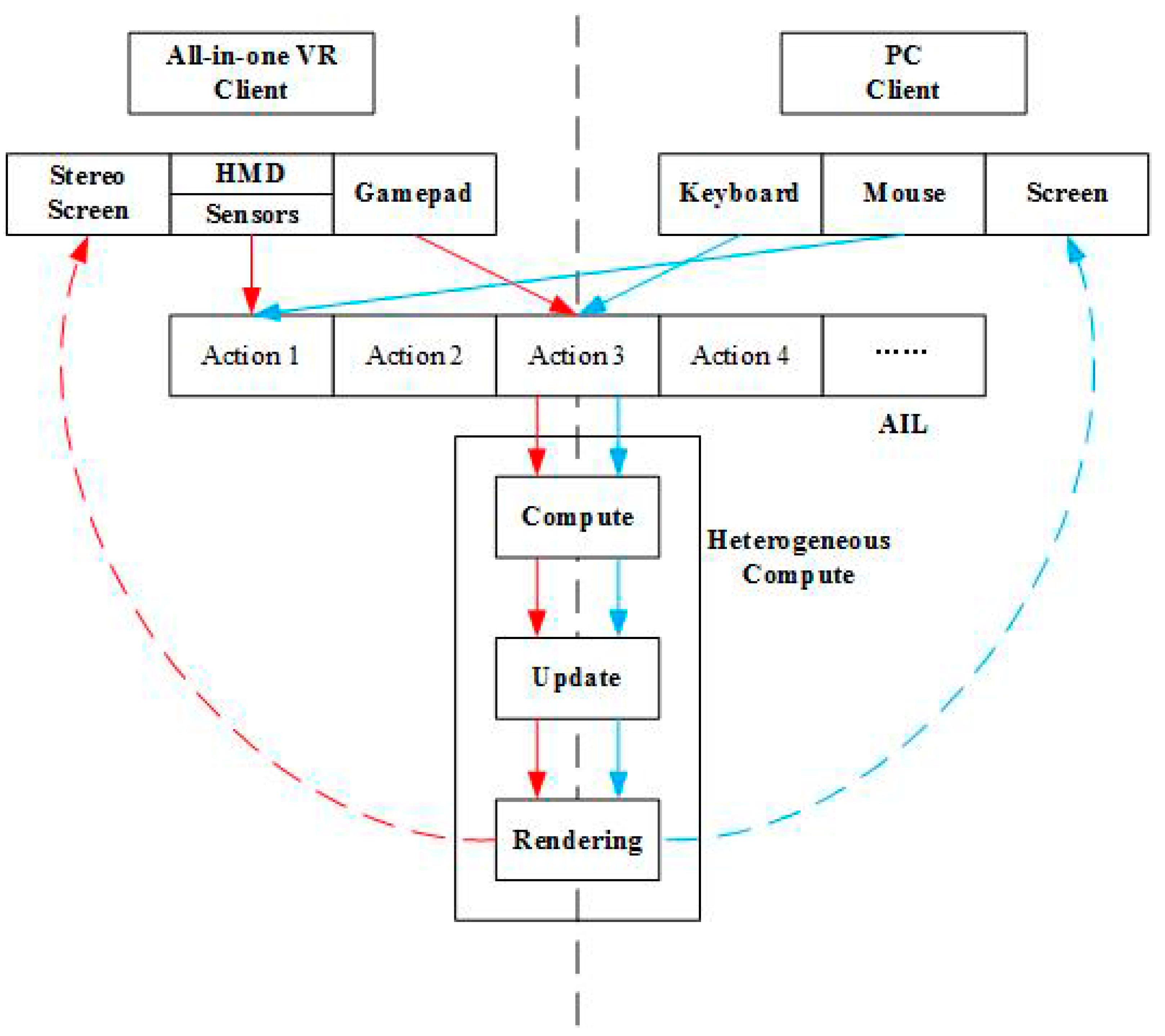
3.2.1. Abstract Interaction Layer for Heterogeneous Clients
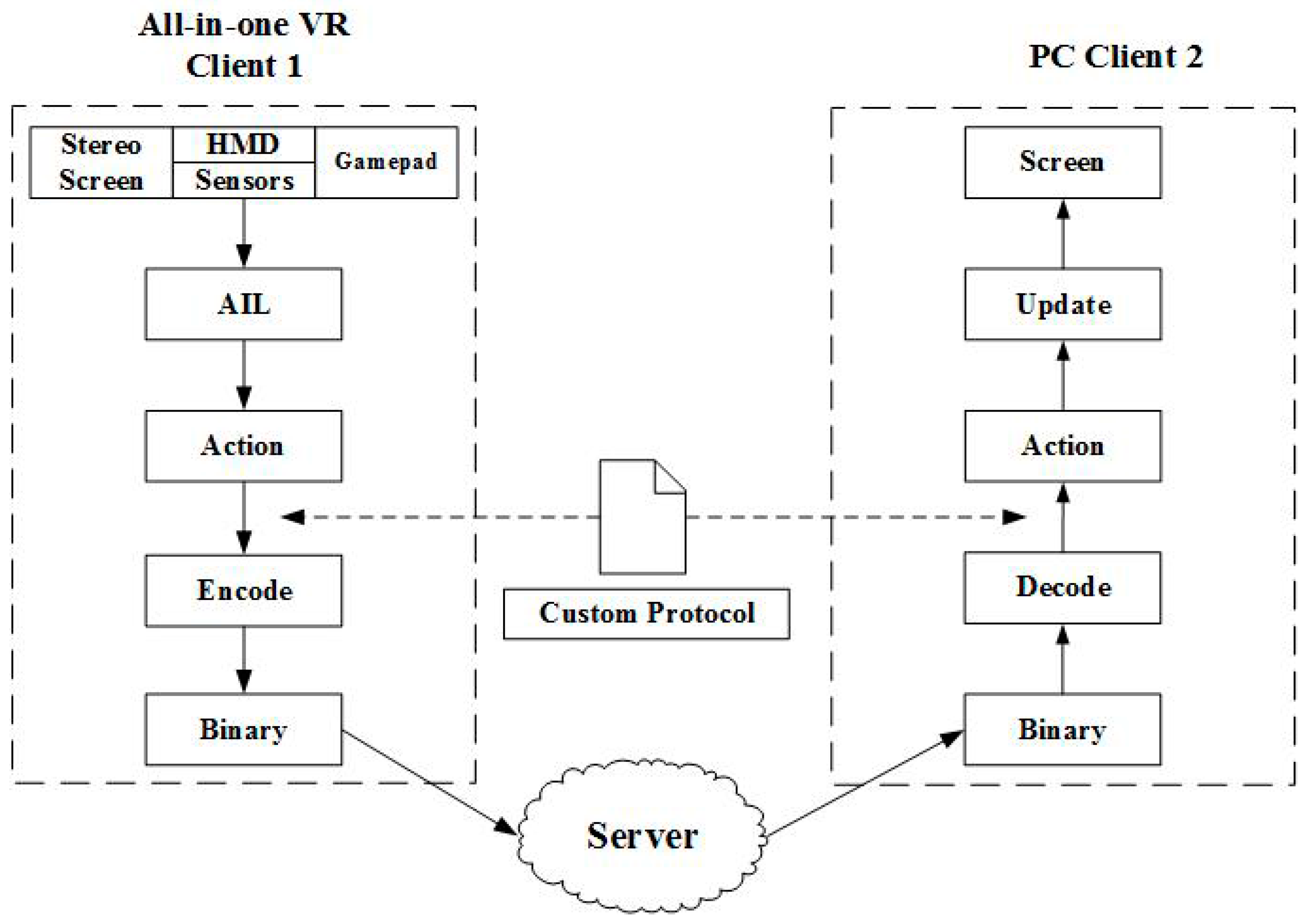
3.2.2. Protocol-Based Interactions between Heterogeneous Clients
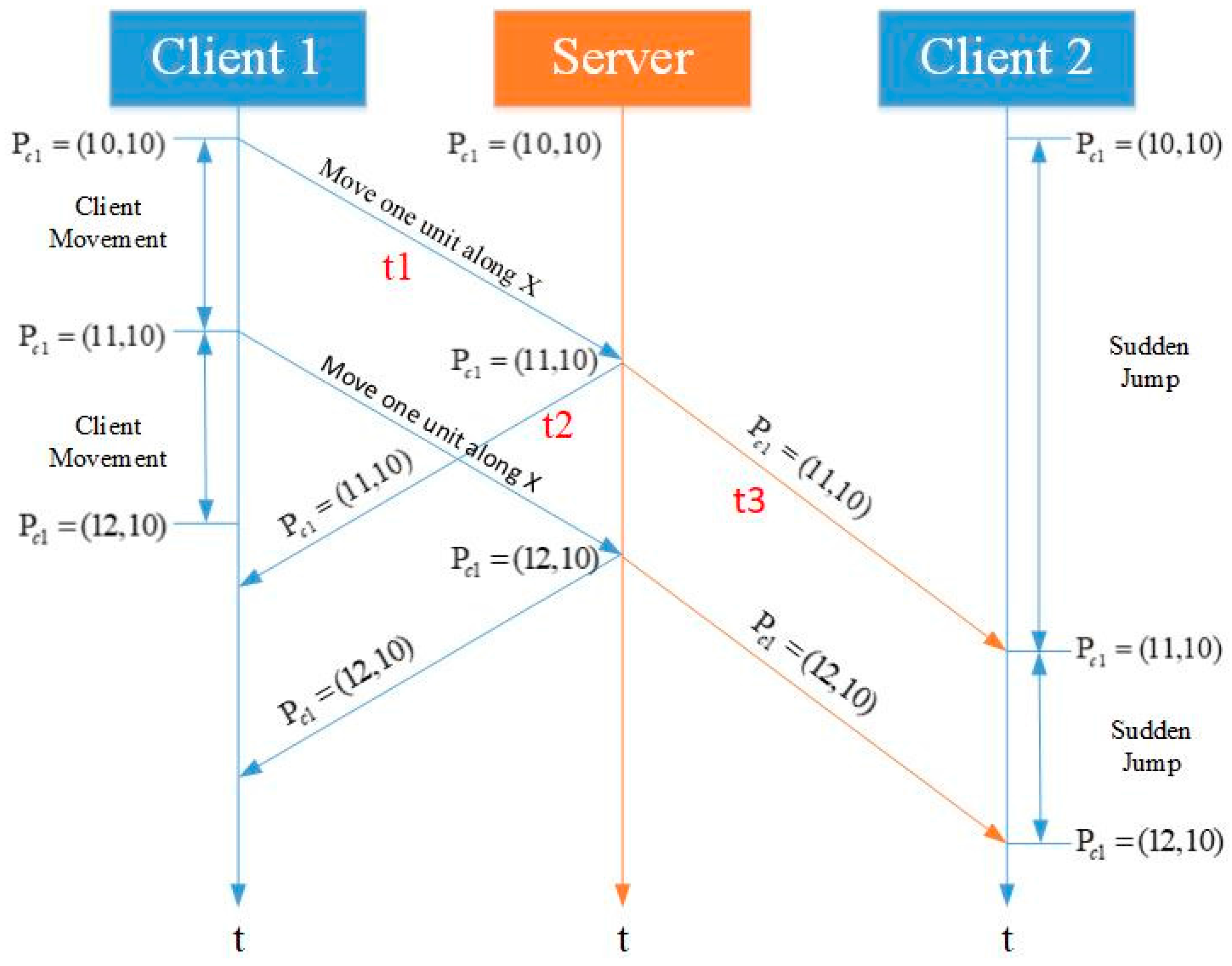
3.2.3. Adjusted Dead Reckoning Algorithm for Client Prediction
4. Prototype System
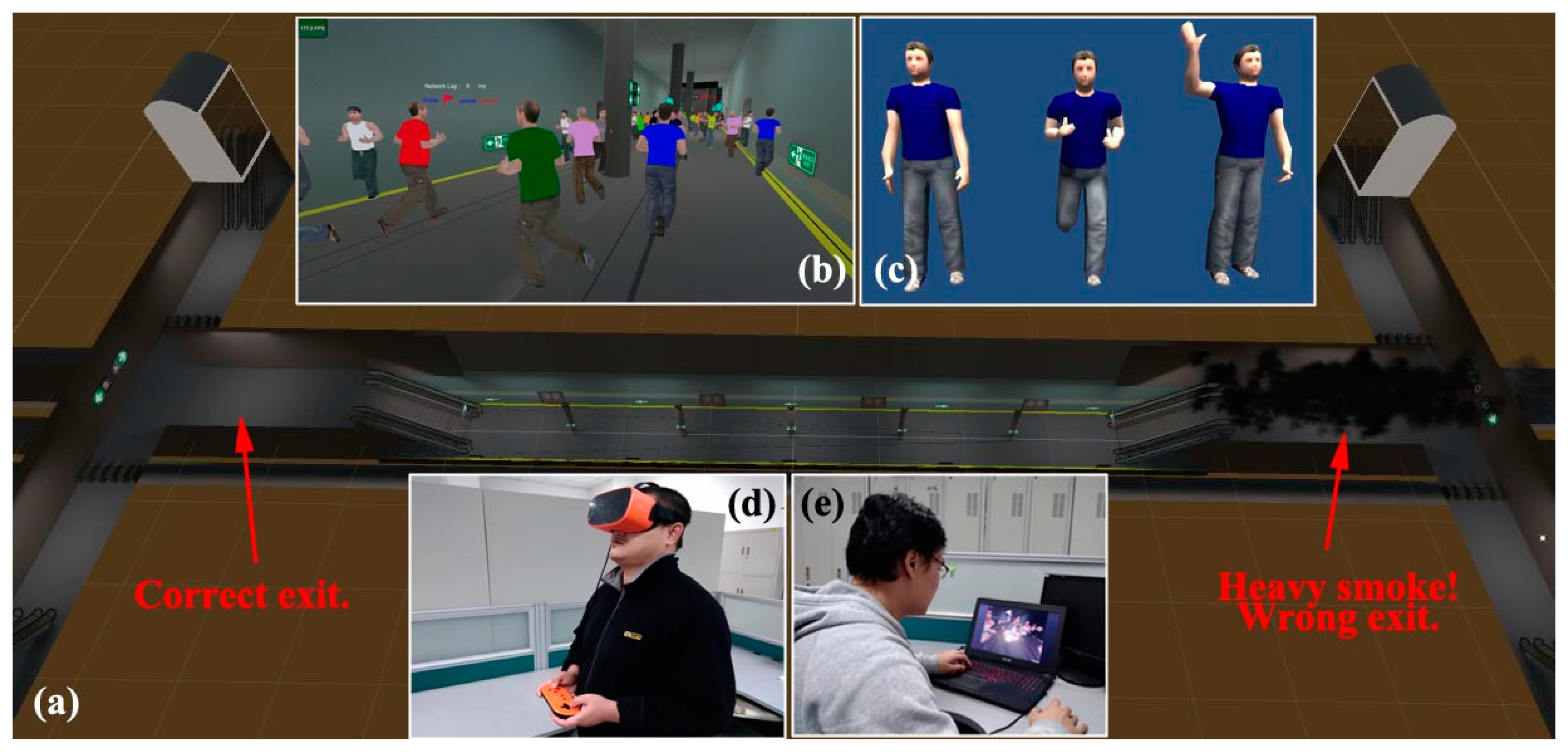
4.1. Heterogeneous Distributed Virtual Evacuation Prototype System
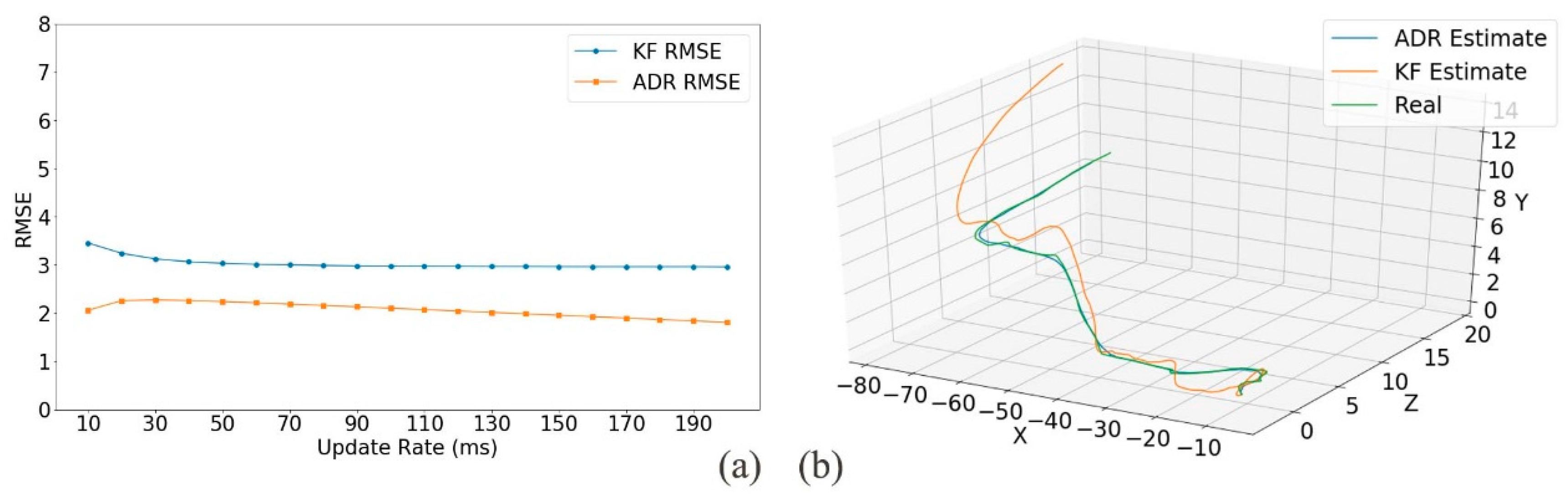
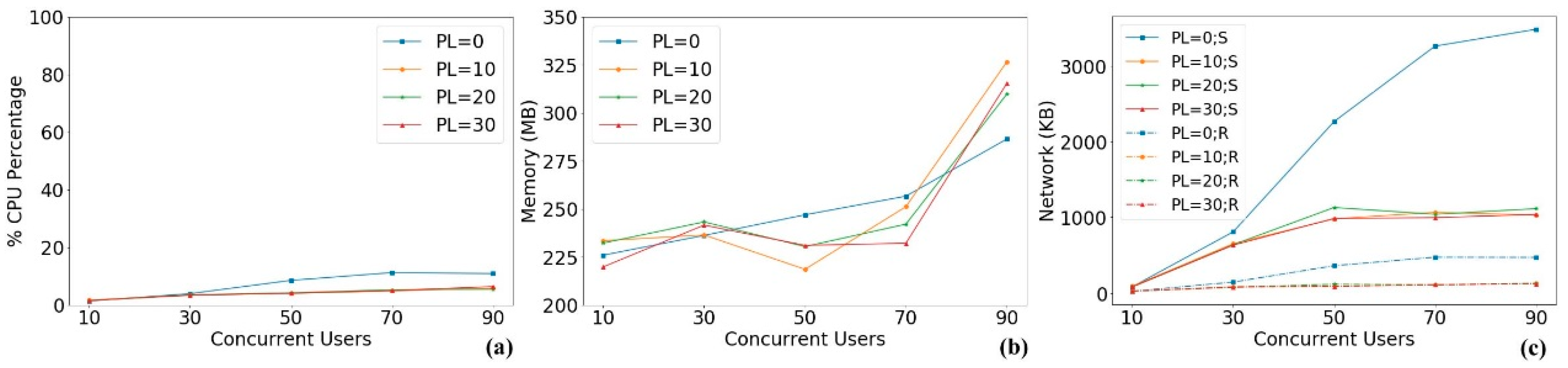
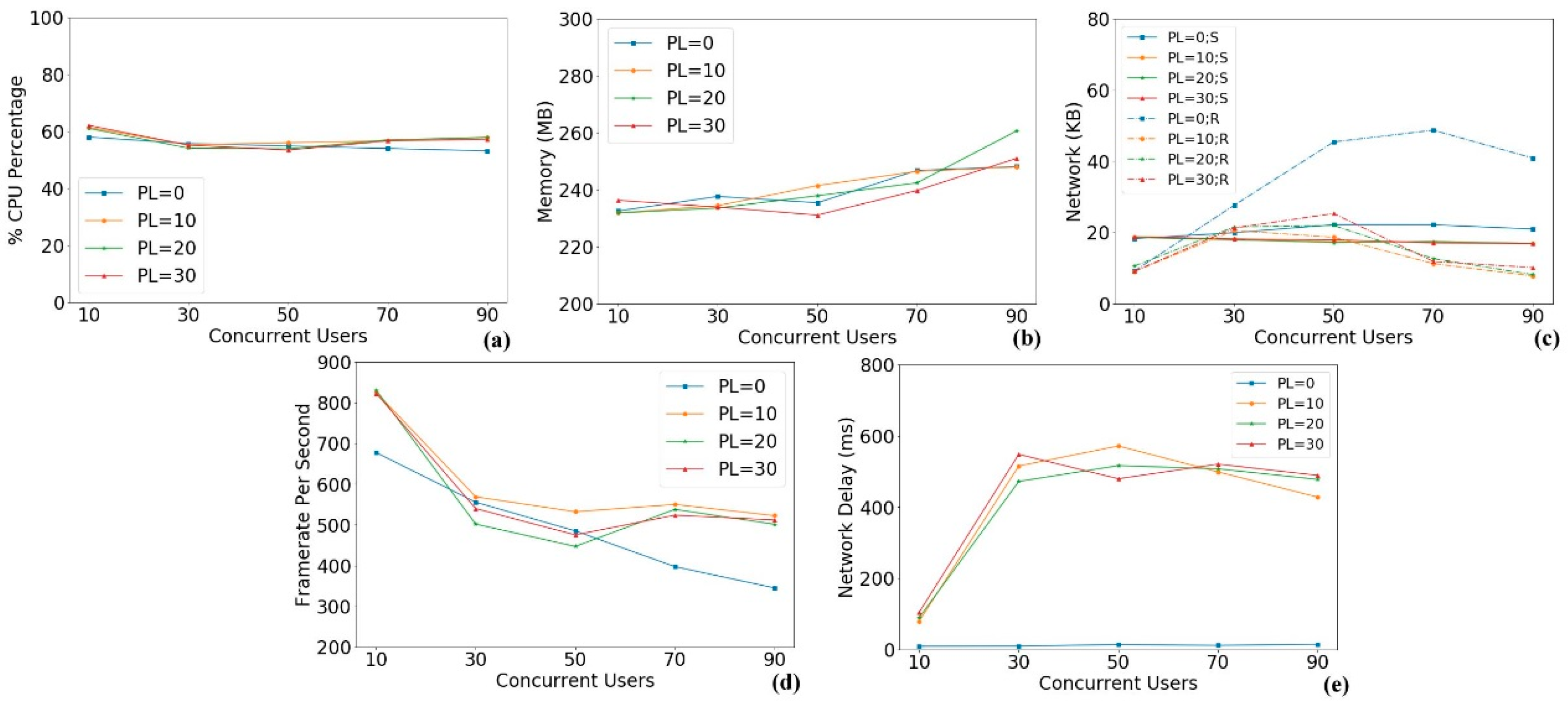
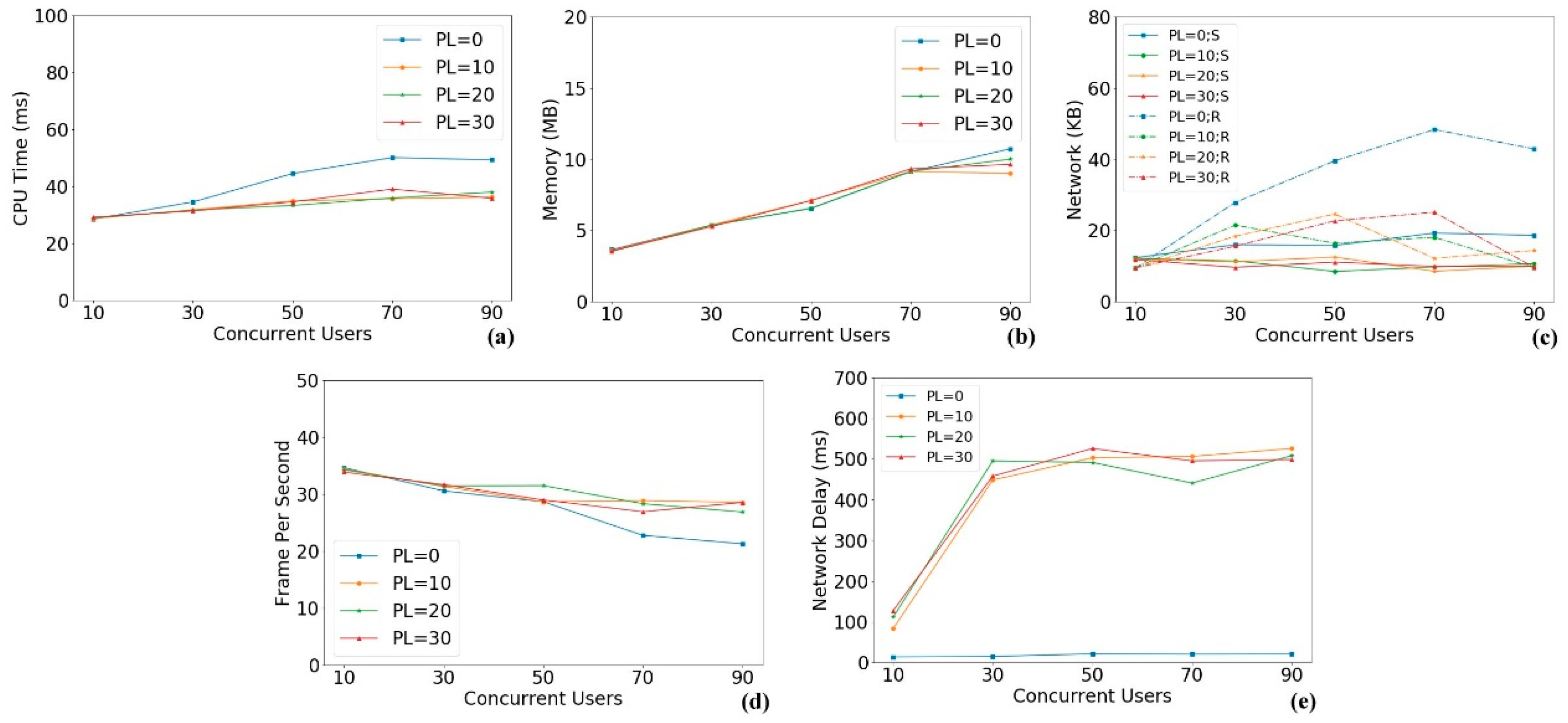
4.2. Performance Evaluation of Key Algorithms
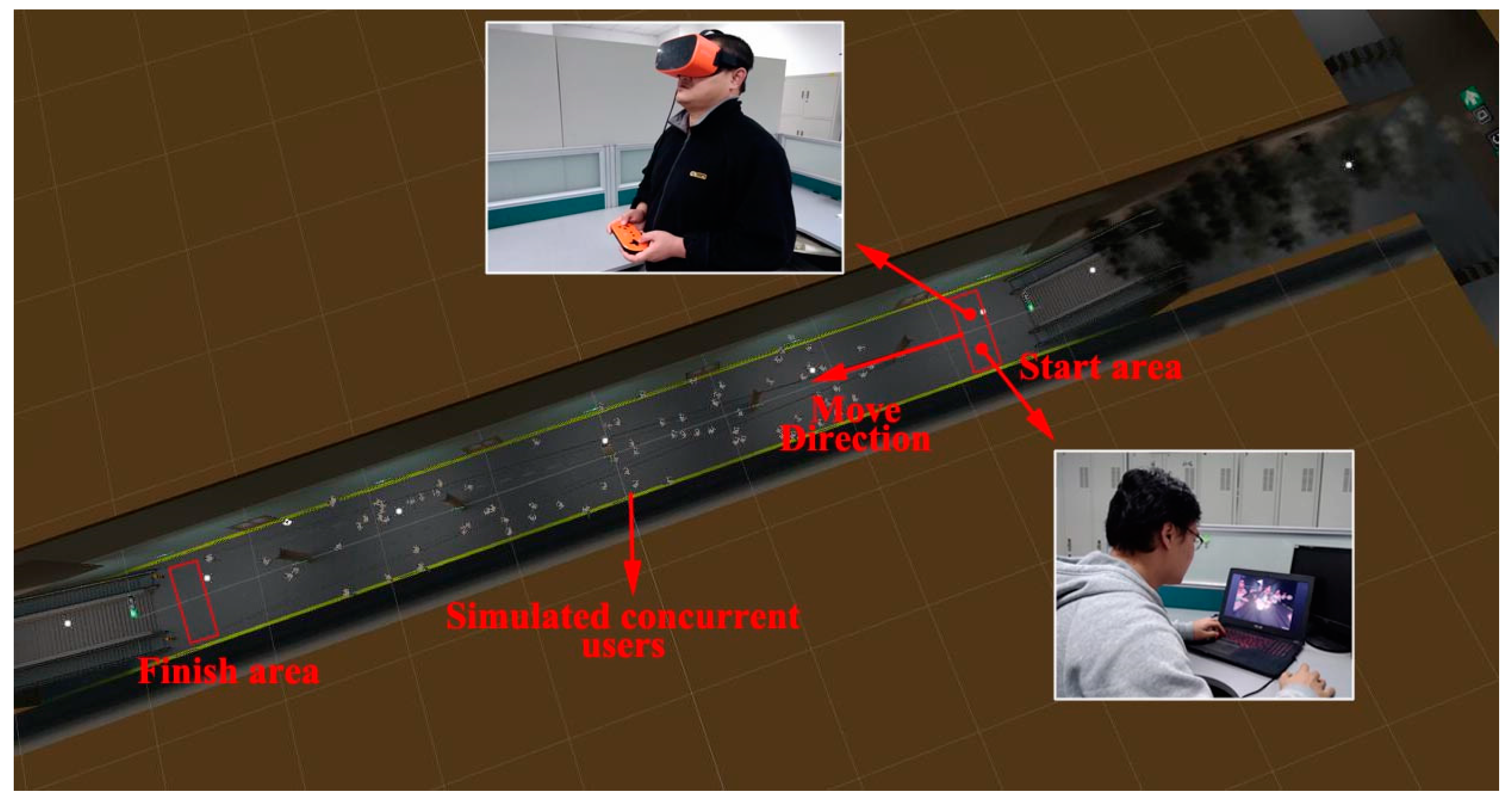
4.3. System Overall Performance Test
4.4. Data Analysis
5. Discussion
6. Conclusions and Future Works
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Raggett, D. Extending WWW to support platform independent virtual reality. In Proc. Internet Society/European Networking; Internet Society Press: Reston, VA, USA, 1995; p. 242. [Google Scholar]
- Haklay, M.E. Virtual reality and GIS: Applications, trends and directions. In Virtual Reality in Geography; Taylor & Francis: London, UK, 2002; pp. 47–57. [Google Scholar]
- Lin, H.; Chen, M.; Lu, G.; Zhu, Q.; Gong, J.; You, X.; Wen, Y.; Xu, B.; Hu, M. Virtual Geographic Environments (VGEs): A New Generation of Geographic Analysis Tool. Earth-Sci. Rev. 2013, 126, 74–84. [Google Scholar] [CrossRef]
- Xu, B.; Lin, H.; Chiu, L.; Hu, Y.; Zhu, J.; Hu, M.; Cui, W. Collaborative virtual geographic environments: A case study of air pollution simulation. Inf. Sci. 2011, 181, 2231–2246. [Google Scholar] [CrossRef]
- Mallot, H.; Gillner, S.; Van Veen, H.; Bülthoff, H. Behavioral experiments in spatial cognition using virtual reality. In Spatial Cognition; Springer: Berlin/Heidelberg, Germany, 1998; pp. 447–467. [Google Scholar]
- Bülthoff, H.H.; Campos, J.L.; Meilinger, T. Virtual Reality as a Valuable Research Tool for Investigating Different Aspects of Spatial Cognition (Abstract). In Proceedings of the International Conference on Spatial Cognition, Freiburg, Germany, 15–19 September 2008; pp. 1–3. [Google Scholar]
- Notelaers, S.; De Weyer, T.; Goorts, P.; Maesen, S.; Vanacken, L.; Coninx, K.; Bekaert, P. HeatMeUp: A 3DUI serious game to explore collaborative wayfinding. In Proceedings of the 2012 IEEE Symposium on 3D User Interfaces (3DUI), Costa Mesa, CA, USA, 4–5 March 2012; pp. 177–178. [Google Scholar]
- Fajen, B.R.; Warren, W.H. Behavioral dynamics of steering, obstable avoidance, and route selection. J. Exp. Psychol. Hum. Percept. Perform. 2003, 29, 343–362. [Google Scholar] [CrossRef] [PubMed]
- Kretz, T.; Hengst, S.; Roca, V.; Perez Arias, A.; Friedberger, S.; Hanebeck, U.D. Calibrating dynamic pedestrian route choice with an Extended Range Telepresence System. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011; pp. 166–172. [Google Scholar]
- Drachen, A.; Thurau, C.; Togelius, J.; Yannakakis, G.N.; Bauckhage, C. Game Data Mining. In Game Analytics; Springer: London, UK, 2013; pp. 205–253. ISBN 978-1-4471-4768-8. [Google Scholar]
- Guardini, P.; Maninetti, P. Better Game Experience through Game Metrics: A Rally Videogame Case Study. In Game Analytics; Springer: London, UK, 2013; pp. 325–361. ISBN 978-1-4471-4768-8. [Google Scholar]
- Medler, B. Visual Game Analytics. In Game Analytics; Springer: London, UK, 2013; pp. 403–433. ISBN 978-1-4471-4768-8. [Google Scholar]
- Gower, D.W., Jr.; Fowlkes, J.E. Simulator Sickness in the UH-60 (Black Hawk) Flight Simulator; US Army Aeromedical Research Laboratory: Fort Rucker, AL, USA, 1989; Volume 60.
- Brooks, J.O.; Goodenough, R.R.; Crisler, M.C.; Klein, N.D.; Alley, R.L.; Koon, B.L.; Logan, W.C.; Ogle, J.H.; Tyrrell, R.A.; Wills, R.F. Simulator sickness during driving simulation studies. Accid. Anal. Prev. 2010, 42, 788–796. [Google Scholar] [CrossRef] [PubMed]
- Cha, M.; Han, S.; Lee, J.; Choi, B. A virtual reality based fire training simulator integrated with fire dynamics data. Fire Saf. J. 2012, 50, 12–24. [Google Scholar] [CrossRef]
- Lovreglio, R.; Gonzalez, V. The Need for Enhancing Earthquake Evacuee Safety by using Virtual Reality Serious Games. In Proceedings of the Lean & Computing in Construction Congress, Crete, Greece, 4–12 July 2017. [Google Scholar]
- Natapov, A.; Fisher-Gewirtzman, D. Visibility of urban activities and pedestrian routes: An experiment in a virtual environment. Comput. Environ. Urban Syst. 2016, 58, 60–70. [Google Scholar] [CrossRef]
- Kuliga, S.F.; Thrash, T.; Dalton, R.C.; Hölscher, C. Virtual reality as an empirical research tool—Exploring user experience in a real building and a corresponding virtual model. Comput. Environ. Urban Syst. 2015, 54, 363–375. [Google Scholar] [CrossRef]
- Schrom-Feiertag, H.; Schinko, C.; Settgast, V.; Seer, S. Evaluation of guidance systems in public infrastructures using eye tracking in an immersive virtual environment. In Proceedings of the 2nd International Workshop on Eye Tracking for Spatial Research, Vi-enna, Austria, 23 September 2014; Volume 1241, pp. 62–66. [Google Scholar]
- Zhou, B.; Tang, X.; Zhang, H.; Wang, X. Measuring crowd collectiveness. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1586–1599. [Google Scholar] [CrossRef] [PubMed]
- Shao, J.; Kang, K.; Loy, C.C.; Wang, X. Deeply learned attributes for crowded scene understanding. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 4657–4666. [Google Scholar]
- Helbing, D.; Molnár, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282–4286. [Google Scholar] [CrossRef]
- Li, W.; Gong, J.; Yu, P.; Shen, S.; Li, R.; Duan, Q. Simulation and analysis of congestion risk during escalator transfers using a modified social force model. Phys. A Stat. Mech. Its Appl. 2014, 420, 28–40. [Google Scholar] [CrossRef]
- Treuille, A.; Cooper, S.; Popović, Z. Continuum crowds. ACM Trans. Graph. 2006, 25, 1160–1168. [Google Scholar] [CrossRef]
- Torrens, P.M. High-resolution space-time processes for agents at the built-human interface of urban earthquakes. Int. J. Geogr. Inf. Sci. 2014, 28, 964–986. [Google Scholar] [CrossRef]
- Hoogendoorn, S.P.; Daamen, W. Pedestrian Behavior at Bottlenecks. Transp. Sci. 2005, 39, 147–159. [Google Scholar] [CrossRef]
- Lovreglio, R.; Ronchi, E.; Nilsson, D. Calibrating floor field cellular automaton models for pedestrian dynamics by using likelihood function optimization. Phys. A Stat. Mech. Its Appl. 2015, 438, 308–320. [Google Scholar] [CrossRef]
- Wang, C.; Li, L.; Yuan, J.; Zhai, L.; Liu, G. Development of emergency drills system for petrochemical plants based on WebVR. Procedia Environ. Sci. 2011, 10, 313–318. [Google Scholar] [CrossRef]
- Moussaïd, M.; Kapadia, M.; Thrash, T.; Sumner, R.W.; Gross, M.; Helbing, D.; Hölscher, C. Crowd behaviour during high-stress evacuations in an immersive virtual environment. J. R. Soc. Interface 2016, 13, 20160414. [Google Scholar] [CrossRef] [PubMed]
- Cruz-Neira, C.; Sandin, D.J.; DeFanti, T.A.; Kenyon, R.V.; Hart, J.C. The CAVE: Audio visual experience automatic virtual environment. Commun. ACM 1992, 35, 64–72. [Google Scholar] [CrossRef]
- Chen, W. Collaboration in Multi-User Immersive Virtual Environments. Ph.D. Thesis, Université Paris-Saclay, Paris, France, 2016. [Google Scholar]
- Kinateder, M.; Ronchi, E.; Nilsson, D.; Kobes, M.; Müller, M.; Pauli, P.; Mühlberger, A. Virtual Reality for Fire Evacuation Research. In Proceedings of the 2014 Federated Conference on Computer Science and Information Systems, Warsaw, Poland, 7–10 September 2014; Volume 2, pp. 319–327. [Google Scholar]
- Kinateder, M.; Ronchi, E.; Gromer, D.; Müller, M.; Jost, M.; Nehfischer, M.; Mühlberger, A.; Pauli, P. Social influence on route choice in a virtual reality tunnel fire. Transp. Res. Part F Traffic Psychol. Behav. 2014, 26, 116–125. [Google Scholar] [CrossRef]
- Lovreglio, R.; Fonzone, A.; dell’Olio, L. A mixed logit model for predicting exit choice during building evacuations. Transp. Res. Part A Policy Pract. 2016, 92, 59–75. [Google Scholar] [CrossRef]
- Ronchi, E.; Nilsson, D.; Kojić, S.; Eriksson, J.; Lovreglio, R.; Modig, H.; Walter, A.L. A Virtual Reality Experiment on Flashing Lights at Emergency Exit Portals for Road Tunnel Evacuation. Fire Technol. 2016, 52, 623–647. [Google Scholar] [CrossRef]
- Qingshan, Y.; Lin, M. Human-Activity-Geographical-Environment Relationship, Its System and Its Regional System. Econ. Geogr. 2001, 5, 4. [Google Scholar]
- Jianhua, G. On Thought and Methodology of Virtual Geographic Experiment. J. Geomat. Sci. Technol. 2013, 30, 399–408. [Google Scholar] [CrossRef]
- Williams, D. The mapping principle, and a research framework for virual worlds. Commun. Theory 2010, 20, 451–470. [Google Scholar] [CrossRef]
- Moussaïd, M.; Perozo, N.; Garnier, S.; Helbing, D.; Theraulaz, G. The walking behaviour of pedestrian social groups and its impact on crowd dynamics. PLoS ONE 2010, 5, e10047. [Google Scholar] [CrossRef] [PubMed]
- McMahan, R.; Kopper, R.; Bowman, D. Principles for Designing Effective 3D Interaction Techniques. In Handbook of Virtual Environments; Human Factors and Ergonomics; CRC Press: Boca Raton, FL, USA, 2014; pp. 285–311. ISBN 978-1-4665-1184-2. [Google Scholar]
- Wikipedia. Dead Reckoning—Wikipedia, The Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Dead_reckoning (accessed on 5 February 2018).
- Murphy, C. Believable Dead Reckoning for Networked Games. In Game Engine Gems 2; A K Peters/CRC Press: Boca Raton, FL, USA, 2011; pp. 307–328. ISBN 978-1-56881-437-7. [Google Scholar]
- Wikipedia. Kalman Filter—Wikipedia, The Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Kalman_filter (accessed on 5 February 2018).
- Pantel, L.; Wolf, L.C. On the suitability of dead reckoning schemes for games. In Proceedings of the 1st Workshop on Network and System Support for Games, Braunschweig, Germany, 16–17 April 2002; pp. 79–84. [Google Scholar]
- Shi, W.; Corriveau, J.P.; Agar, J. Dead reckoning using play patterns in a simple 2D multiplayer online game. Int. J. Comput. Games Technol. 2014, 2014. [Google Scholar] [CrossRef]
- Thrash, T.; Kapadia, M.; Moussaid, M.; Wilhelm, C.; Helbing, D.; Sumner, R.W.; Hölscher, C. Evaluation of Control Interfaces for Desktop Virtual Environments. Presence Teleoperators Virtual Environ. 2015, 24, 322–334. [Google Scholar] [CrossRef]











© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, S.; Gong, J.; Liang, J.; Li, W.; Zhang, D.; Huang, L.; Zhang, G. A Heterogeneous Distributed Virtual Geographic Environment—Potential Application in Spatiotemporal Behavior Experiments. ISPRS Int. J. Geo-Inf. 2018, 7, 54. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7020054
Shen S, Gong J, Liang J, Li W, Zhang D, Huang L, Zhang G. A Heterogeneous Distributed Virtual Geographic Environment—Potential Application in Spatiotemporal Behavior Experiments. ISPRS International Journal of Geo-Information. 2018; 7(2):54. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7020054
Chicago/Turabian StyleShen, Shen, Jianhua Gong, Jianming Liang, Wenhang Li, Dong Zhang, Lin Huang, and Guoyong Zhang. 2018. "A Heterogeneous Distributed Virtual Geographic Environment—Potential Application in Spatiotemporal Behavior Experiments" ISPRS International Journal of Geo-Information 7, no. 2: 54. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7020054