Use of DEMs Derived from TLS and HRSI Data for Landslide Feature Recognition

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Test Case and Data
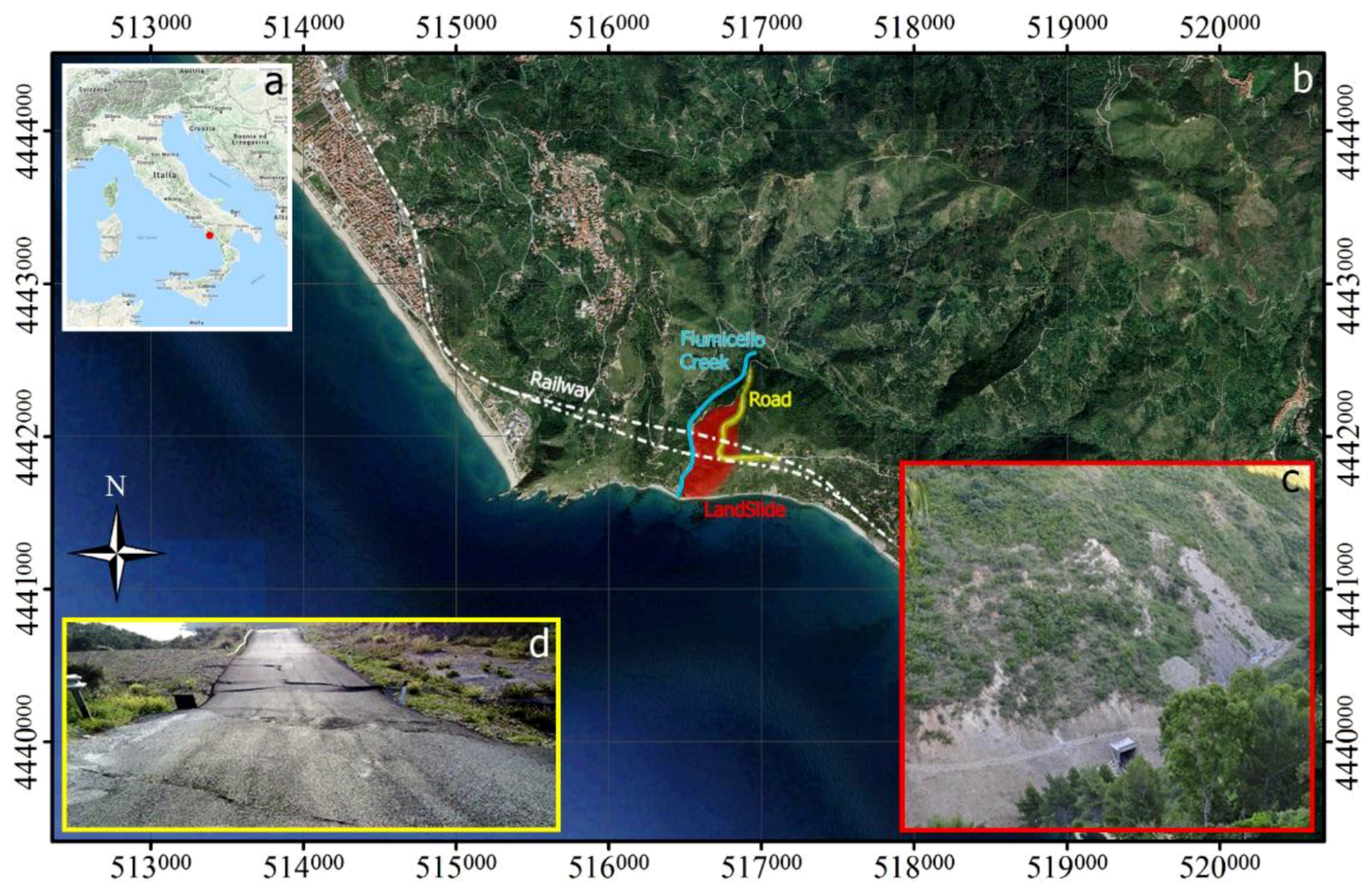
2.1. Test Case
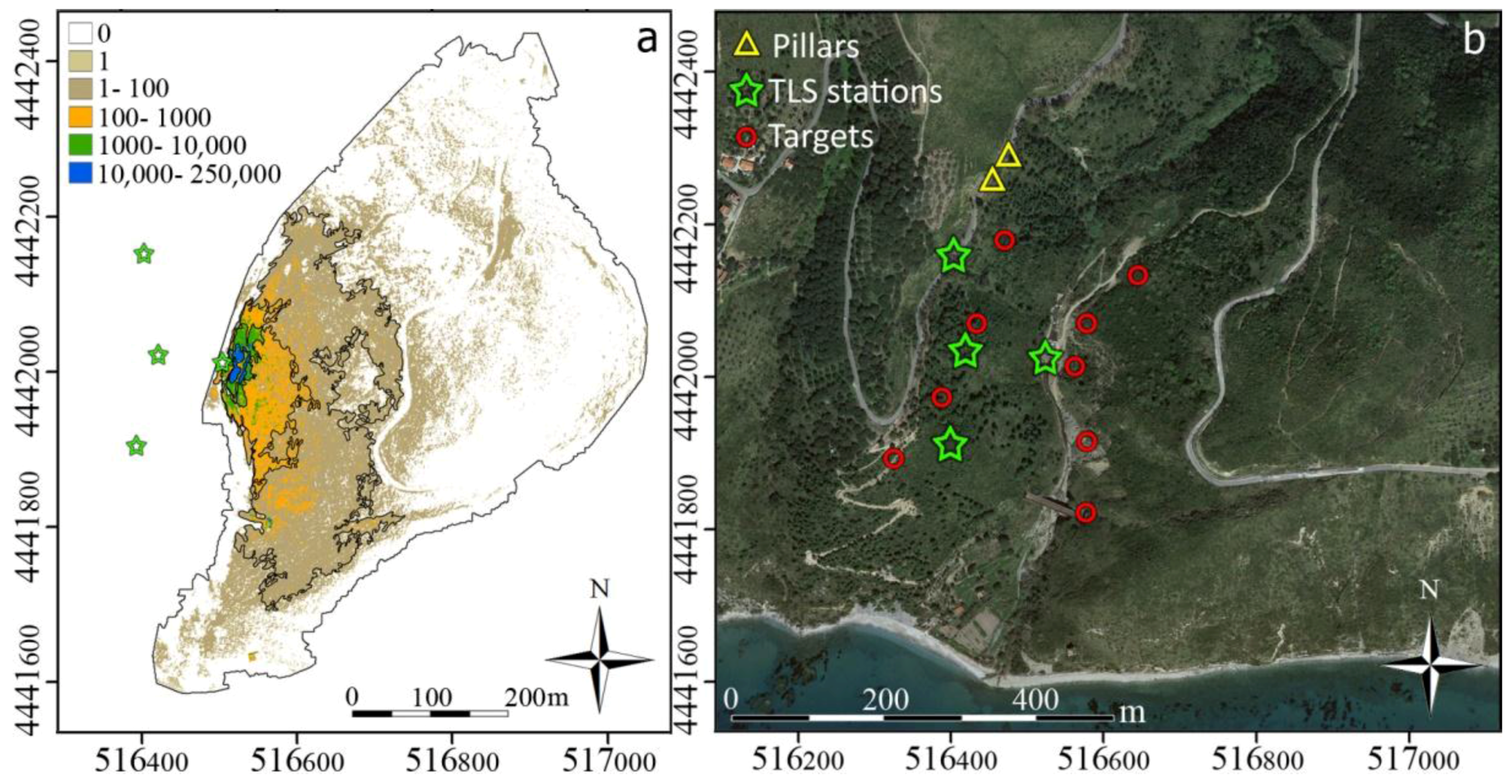
2.2. TLS Data
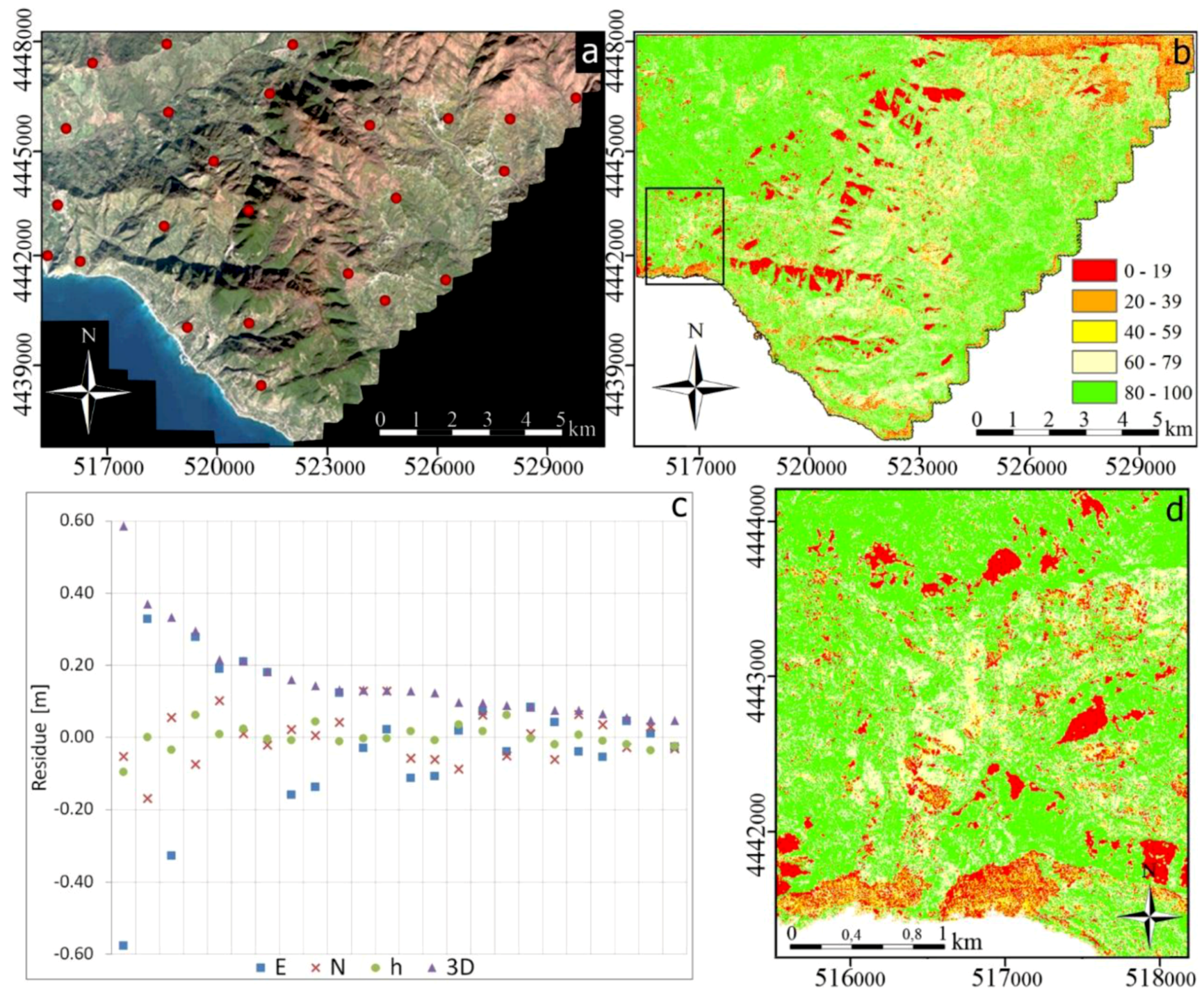
2.3. TLS Stereopair Satellite Images
3. Methods
3.1. DEM Construction and Related Error Analysis
3.2. DEM-Derived Maps (Slope and Aspect)
Propagation of Error in Slope and Aspect Maps
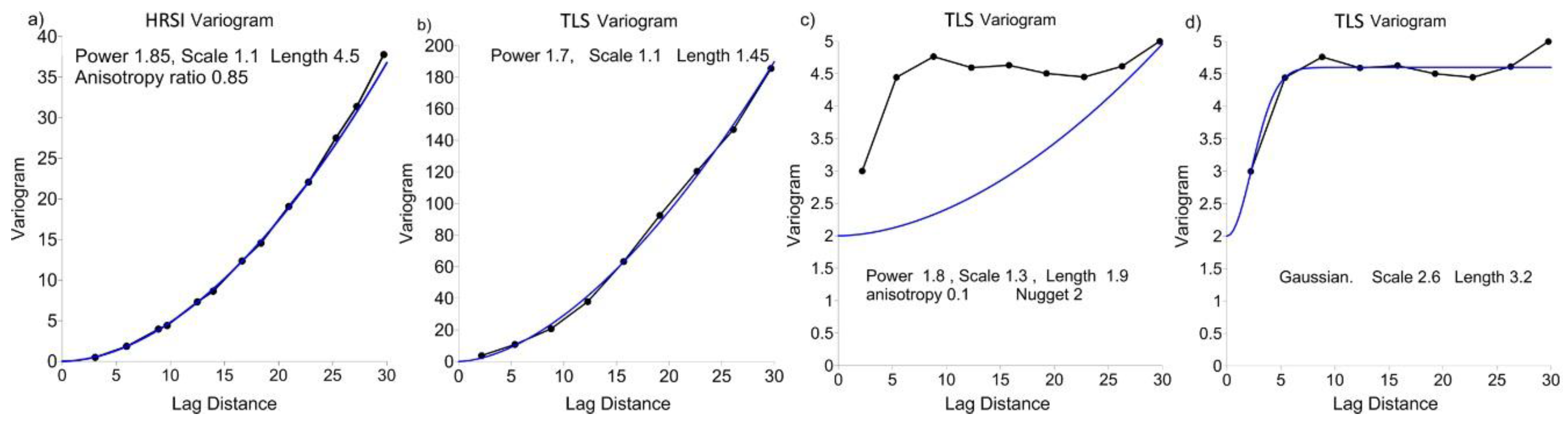
- to deduce from the variogram a linear correlation coefficient ρ(d) for a lag d corresponding to the distance between the nodes, which is a function of the grid size D;
- to consider the same linear correlation value for all pairs of nodes at the same distance d.
- reads the input grids in textual format, taking into account the ‘no value’ nodes eventually present in the standard deviation grid provided by kriging;
- applies the above equations for all nodes except for those with undefined neighboring nodes;
- computes the new grids of the DEM-derived parameters and relative uncertainties.
3.3. Criteria of Geomorphological Mapping
- (1)
- Step 1 concerns traditional field-surveyed, symbol-based geomorphological mapping of the study landslides and the surrounding landslide-prone areas.
- (2)
- Step 2 ‘translates’ Step 1 into a bounded, full-coverage geomorphological map, delimiting and coding the geomorphological features into geomorphological units defined by nodes, boundary lines, polygons, and related topological rules [6]. Topographic optimization of the data fusion of the TLS point cloud with GeoEye images is used to characterize the above hierarchical landslide units by significant multiscale geo-morphometric analysis.
4. Results
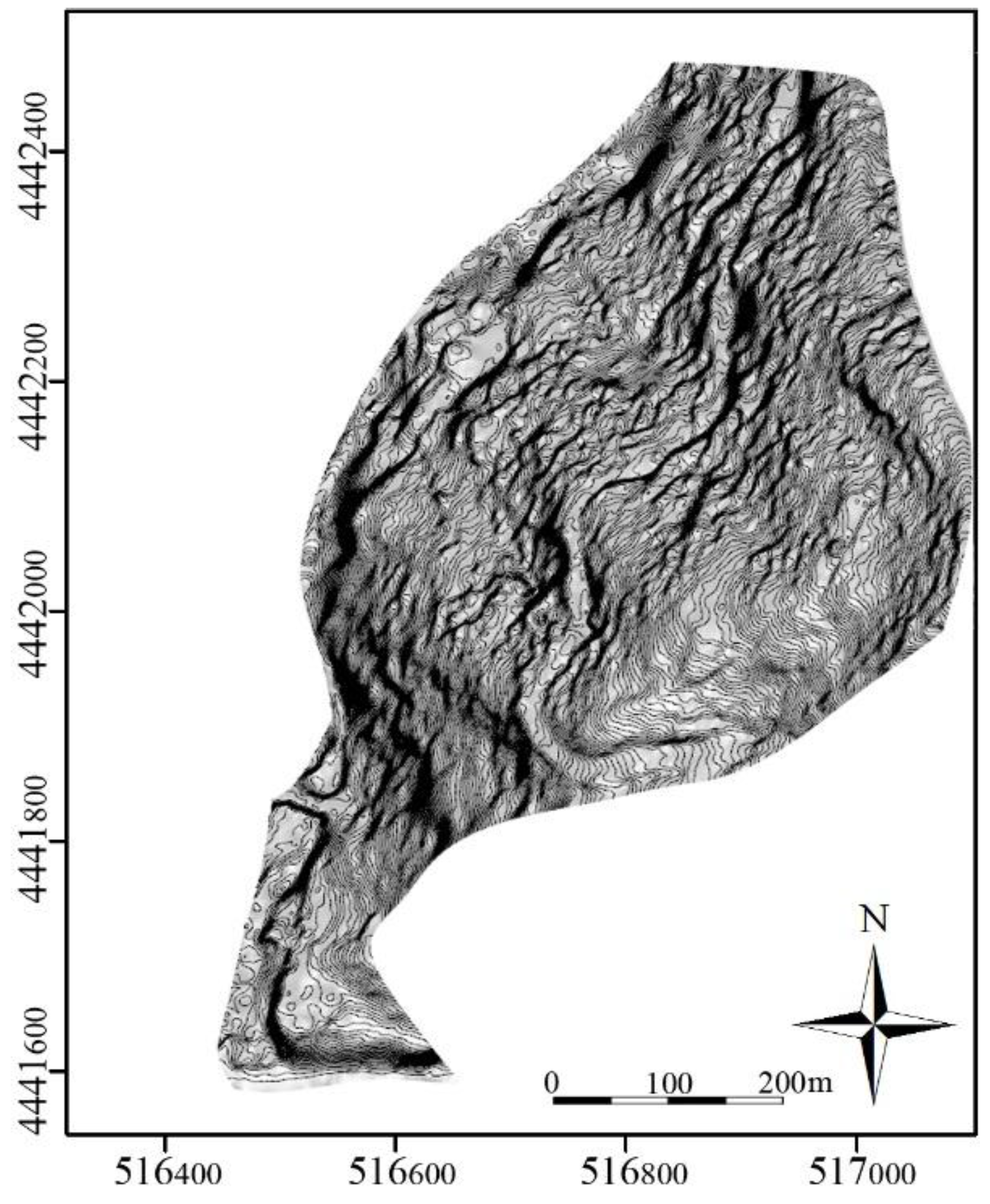
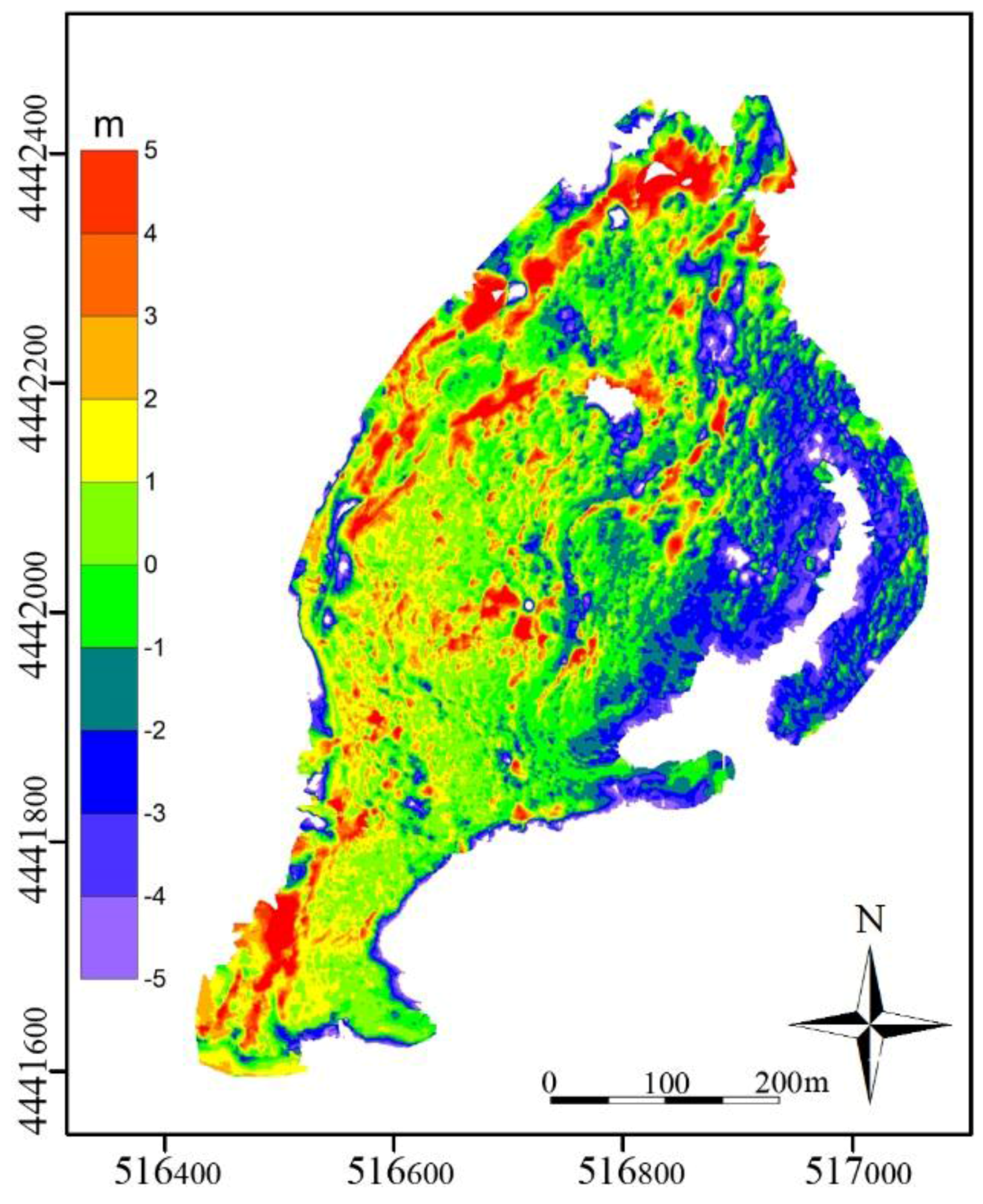
4.1. Production of DEM
4.2. Geomorphological, Expert-Basd Accuracy Assessment
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fell, R.; Corominas, J.; Bonnard, C.; Cascini, L.; Leroi, E.; Savage, W.Z. Guidelines for landslide susceptibility, hazard and risk zoning for land use planning. Eng. Geol. 2008, 102, 85–98. [Google Scholar] [CrossRef]
- Van Westen, C.J.; Castellanos, E.; Kuriakose, S.L. Spatial data for landslide susceptibility, hazard, and vulnerability assessment: An overview. Eng. Geol. 2008, 102, 112–131. [Google Scholar] [CrossRef]
- Corominas, J.; van Westen, C.; Frattini, P.; Cascini, L.; Malet, J.-P.; Fotopoulou, S.; Catani, F.; Van Den Eeckhaut, M.; Mavrouli, O.; Agliardi, F.; et al. Recommendations for the quantitative analysis of landslide risk. Bull. Eng. Geol. Environ. 2014, 73, 209–263. [Google Scholar] [CrossRef] [Green Version]
- Rossi, M.; Mondini, A.C.; Marchesini, I.; Santangelo, M.; Bucci, F.; Guzzetti, F. Landslide morphometric signature. In Proceedings of the 8th IAG/AIG International Conference on Geomorphology Geomorphology and Sustainability, Paris, France, 27–31 August 2013. [Google Scholar]
- Guzzetti, F.; Mondini, A.C.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Chang, K.T. Landslide inventory maps: New tools for an old problem. Earth-Sci. Rev. 2012, 112, 42–66. [Google Scholar] [CrossRef]
- Dramis, F.; Guida, D.; Cestari, A. Chapter three–nature and aims of geomorphological mapping. In Developments in Earth Surface Processes; Mike, J., Smith, P.P., James, S.G., Eds.; Elsevier: New York, NY, USA, 2011; Volume 15, pp. 39–73. [Google Scholar]
- Guarnieri, A.; Masiero, A.; Vettore, A.; Pirotti, F. Evaluation of the dynamic processes of a landslide with laser scanners and bayesian methods. Geomat. Nat. Hazards Risk 2015, 6, 614–634. [Google Scholar] [CrossRef]
- Minár, J.; Evans, I.S. Elementary forms for land surface segmentation: The theoretical basis of terrain analysis and geomorphological mapping. Geomorphology 2008, 95, 236–259. [Google Scholar] [CrossRef]
- Smith, M.J. Chapter eight–digital mapping: Visualisation, interpretation and quantification of landforms. In Developments in Earth Surface Processes; Mike, J., Smith, P.P., James, S.G., Eds.; Elsevier: New York, NY, USA, 2011; Volume 15, pp. 225–251. [Google Scholar]
- Mark, D.; Smith, B. A science of topography: From qualitative ontology to digital representations. In Geographic Information Science and Mountain Geomorphology; Bishop, M., Shroder, J., Eds.; Springer: Berlin, Germany, 2004; pp. 75–100. [Google Scholar]
- Oguchi, T.; Hayakawa, Y.S.; Wasklewicz, T. Chapter seven–data sources. In Developments in Earth Surface Processes; Mike, J., Smith, P.P., James, S.G., Eds.; Elsevier: New York, NY, USA, 2011; Volume 15, pp. 189–224. [Google Scholar]
- Berti, M.; Corsini, A.; Daehne, A. Comparative analysis of surface roughness algorithms for the identification of active landslides. Geomorphology 2013, 182, 1–18. [Google Scholar] [CrossRef]
- Pradhan, B.; Sameen, M.I. Effects of the spatial resolution of digital elevation models and their products on landslide susceptibility mapping. In Laser Scanning Applications in Landslide Assessment; Pradhan, B., Ed.; Springer International Publishing: Cham, Switzerland, 2017; pp. 133–150. [Google Scholar]
- Bajracharya, B.; Bajracharya, S.R. Landslide Mapping of the Everest Region Using High Resolution Satellite Images and 3d Visualization. In Proceedings of the Mountain GIS e-Conference, Kathmandu, Nepal, 14–25 January 2008. [Google Scholar]
- Haeberlin, Y.; Turberg, P.; Retière, A.; Senegas, O.; Parriaux, A. Validation of spot 5 satellite imagery for geological hazard identification and risk assessment for landslides, mud and debris flows in matagalpa, nicaragua. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 273–278. [Google Scholar]
- Nichol, J.E.; Shaker, A.; Wong, M.-S. Application of high-resolution stereo satellite images to detailed landslide hazard assessment. Geomorphology 2006, 76, 68–75. [Google Scholar] [CrossRef]
- Barlow, J.; Franklin, S.; Martin, Y. High spatial resolution satellite imagery, dem derivatives, and image segmentation for the detection of mass wasting processes. Photogramm. Eng. Remote Sens. 2006, 72, 687–692. [Google Scholar] [CrossRef]
- Cheng, K.S.; Wei, C.; Chang, S.C. Locating landslides using multi-temporal satellite images. Adv. Space Res. 2004, 33, 296–301. [Google Scholar] [CrossRef]
- Metternicht, G.; Hurni, L.; Gogu, R. Remote sensing of landslides: An analysis of the potential contribution to geospatial systems for hazard assessment in mountain environments. Remote Sens. Environ. 2005, 98, 284–303. [Google Scholar] [CrossRef]
- Sofia, G.; Bailly, J.S.; Chehata, N.; Tarolli, P.; Levavasseur, F. Comparison of pleiades and lidar digital elevation models for terraces detection in farmlands. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1567–1576. [Google Scholar] [CrossRef]
- Du, J.-C.; Teng, H.-C. 3D laser scanning and gps technology for landslide earthwork volume estimation. Autom. Constr. 2007, 16, 657–663. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.-H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of lidar in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Pradhan, B.; Sameen, M.I. Laser scanning systems in landslide studies. In Laser Scanning Applications in Landslide Assessment; Springer: Berlin, Germany, 2017; pp. 3–19. [Google Scholar]
- Telling, J.; Lyda, A.; Hartzell, P.; Glennie, C. Review of earth science research using terrestrial laser scanning. Earth-Sci. Rev. 2017, 169, 35–68. [Google Scholar] [CrossRef]
- Teza, G.; Galgaro, A.; Zaltron, N.; Genevois, R. Terrestrial laser scanner to detect landslide displacement fields: A new approach. Int. J. Remote Sens. 2007, 28, 3425–3446. [Google Scholar] [CrossRef]
- Bishop, M.P.; Shroder, J.F., Jr.; Colby, J.D. Remote sensing and geomorphometry for studying relief production in high mountains. Geomorphology 2003, 55, 345–361. [Google Scholar] [CrossRef]
- Bishop, M.P.; Shroder, J.F., Jr.; Hickman, B.L.; Copland, L. Scale-Dependent Analysis of Satellite Imagery for Characterization of Glacier Surfaces in the Karakoram Himalaya; Elsevier: Amsterdam, Holland, 1998; Volume 21, pp. 217–232. [Google Scholar]
- Miska, L.; Jan, H. Evaluation of current statistical approaches for predictive geomorphological mapping. Geomorphology 2005, 67, 299–315. [Google Scholar] [CrossRef]
- Hofierka, J.; Cebecauer, T.; Šúri, M. Optimisation of interpolation parameters using cross-validation. In Digital Terrain Modelling: Development and Applications in a Policy Support Environment; Peckham, R.J., Jordan, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 67–82. [Google Scholar]
- Polidori, L.; El Hage, M.; Valeriano, M.D.M. Digital elevation model validation with no ground control: Application to the topodata dem in brazil. Bol. Ciênc. Geod. 2014, 20, 467–479. [Google Scholar] [CrossRef]
- Wise, S. Cross-validation as a means of investigating dem interpolation error. Comput. Geosci. 2011, 37, 978–991. [Google Scholar] [CrossRef]
- Heuvelink, G.B.M.; Burrough, P.A.; Stein, A. Propagation of errors in spatial modelling with gis. Int. J. Geogr. Inf. Syst. 1989, 3, 303–322. [Google Scholar] [CrossRef]
- Oksanen, J.; Sarjakoski, T. Error propagation of dem-based surface derivatives. Comput. Geosci. 2005, 31, 1015–1027. [Google Scholar] [CrossRef]
- Capotorti, G.; Guida, D.; Siervo, V.; Smiraglia, D.; Blasi, C. Ecological classification of land and conservation of biodiversity at the national level: The case of italy. Biol. Conserv. 2012, 147, 174–183. [Google Scholar] [CrossRef]
- Coico, P.; Calcaterra, D.; De Pippo, T.; Guida, D. A preliminary perspective on landslide dams of campania region, italy. In Landslide Science and Practice: Volume 6: Risk Assessment, Management and Mitigation; Margottini, C., Canuti, P., Sassa, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 83–90. [Google Scholar]
- Martha, T.R.; Kerle, N.; Jetten, V.; van Westen, C.J.; Kumar, K.V. Characterising spectral, spatial and morphometric properties of landslides for semi-automatic detection using object-oriented methods. Geomorphology 2010, 116, 24–36. [Google Scholar] [CrossRef]
- Blasi, C.; Capotorti, G.; Copiz, R.; Guida, D.; Mollo, B.; Smiraglia, D.; Zavattero, L. Classification and mapping of the ecoregions of italy. Plant Biosyst.-Int. J. Deal. All Asp. Plant Biol. 2014, 148, 1255–1345. [Google Scholar] [CrossRef]
- De Vita, P.; Carratù, M.T.; La Barbera, G.; Santoro, S. Kinematics and geological constraints of the slow-moving pisciotta rock slide (southern Italy). Geomorphology 2013, 201, 415–429. [Google Scholar] [CrossRef]
- Barbarella, M.; Fiani, M.; Lugli, A. Landslide monitoring using multitemporal terrestrial laser scanning for ground displacement analysis. Geomat. Nat. Hazards Risk 2015, 6, 398–418. [Google Scholar] [CrossRef]
- Barbarella, M.; Fiani, M.; Lugli, A. Multi-temporal terrestrial laser scanning survey of a landslide. In Modern Technologies for Landslide Monitoring and Prediction; Scaioni, M., Ed.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 89–121. [Google Scholar]
- Barbarella, M.; Fiani, M.; Lugli, A. Uncertainty in terrestrial laser scanner surveys of landslides. Remote Sens. 2017, 9, 113. [Google Scholar] [CrossRef]
- Eltner, A.; Baumgart, P. Accuracy constraints of terrestrial lidar data for soil erosion measurement: Application to a mediterranean field plot. Geomorphology 2015, 245, 243–254. [Google Scholar] [CrossRef]
- InnovMetric Software Inc. PolyWorks® 2014 User Manual; InnovMetric Software Inc.: Quebec, QC, Canada, 2014. [Google Scholar]
- GitHub Inc. CloudCompare 2.8.1 User Manual; Open Source Project. Available online: http://www.cloudcompare.org/doc/qCC/CloudCompare%20v2.6.1%20-%20User%20manual.pdf (accessed on 19 April 2018).
- BAE Systems Inc. Socet GXP® 4.2.0 User Manual; BAE Systems Inc.: Farnborough, UK, 2016. [Google Scholar]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne lidar data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Robert McNeel & Associates. Rhinoceros® 5 User’s Guide. Available online: http://docs.mcneel.com/rhino/5/usersguide/en-us/windows_pdf_user_s_guide.pdf (accessed on 19 April 2018).
- Barnes, R. Variogram Tutorial. Golden Software. Available online: https://www.google.it/#q=Barnes%2C+R.++Variogram+Tutorial (accessed on 18 December 2017).
- Golden Software. Surfer 12® User Manual; Golden Software: Golden, CO, USA, 2014. [Google Scholar]
- Florinsky, I.V. Accuracy of local topographic variables derived from digital elevation models. Int. J. Geogr. Inf. Sci. 1998, 12, 47–61. [Google Scholar] [CrossRef]
- Hunter, G.J.; Goodchild, M.F. Modeling the uncertainty of slope and aspect estimates derived from spatial databases. Geogr. Anal. 1997, 29, 35–49. [Google Scholar] [CrossRef]
- Mikhail, E.M.; Ackermann, F.E. Observations and Least Squares; IEP: New York, NY, USA, 1976. [Google Scholar]
- Fleming, R.W.; Johnson, A.M. Structures associated with strike-slip faults that bound landslide elements. Eng. Geol. 1989, 27, 39–114. [Google Scholar] [CrossRef]
- Parise, M. Observation of surface features on an active landslide, and implications for understanding its history of movement. Nat. Hazards Earth Sys. Sci. 2003, 3, 569–580. [Google Scholar] [CrossRef]
- Guida, D.; Nocera, N.; Vincenzo, S. Analisi morfoevolutiva sulla riattivazione di sistemi franosi a cinematismo intermittente in appennino campano-lucano (italia meridionale). In II Congresso dell’Associazione Italiana di Geologia Applicata; Cesare, R., Ed.; Domenico GUIDA: Bari, Italy, 2006; pp. 114–122. [Google Scholar]
- GoldenSoftware. A Basic Understanding of Surfer Gridding Methods–Part 1. Available online: https://support.goldensoftware.com/hc/en-us/articles/231348728-A-Basic-Understanding-of-Surfer-Gridding-Methods-Part-1 (accessed on 18 December 2017).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Riegl VZ400 | |
|---|---|
| Min. range (m) | 1.5 |
| Max. range (m) | 600 |
| Beam diameter at exit (mm) | 7 |
| Beam divergence (mrad) | 0.3 |
| Spot at 50 m distance (mm) | 18 |
| Max. Horiz. Field of view (deg) | 360 |
| Max. Vert. Field of view (deg) | 100 |
| Min. Horiz. & Vert. step size (deg) | 0.0024 |
| Max. measurement rate (KHz) | 300 |
| Uncertainty of Horiz. & Vert. Step size (deg) | 0.0034 |
| Software name | RiscanPro |
| Product Line | Geostereo | ||
|---|---|---|---|
| Product pixel size | 0.5 m | ||
| Nominal GSD cross scan | 0.462 m | ||
| Nominal GSD Pan along scan | 0.485 m | ||
| Scan azimuth | 0.605° | ||
| Scan direction | Reverse | ||
| Left Stereo | Right Stereo | ||
| Collection azimuth | 65.3446° | Collection azimuth | 151.9583° |
| Collection elevation | 69.35349° | Collection elevation | 64.86915° |
| Sun angle azimut | 160.0611° | Sun angle azimut | 160.2717° |
| Sun angle elevation | 24.20402° | Sun angle elevation | 24.25851° |
| Acquisition date | 2012–01–01 | Acquisition date | 2012–01–01 |
| Acquisition time | 09:43 GMT | Acquisition time | 09:44 GMT |
| Cloud cover | 0% | Cloud cover | 0% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barbarella, M.; Di Benedetto, A.; Fiani, M.; Guida, D.; Lugli, A. Use of DEMs Derived from TLS and HRSI Data for Landslide Feature Recognition. ISPRS Int. J. Geo-Inf. 2018, 7, 160. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7040160
Barbarella M, Di Benedetto A, Fiani M, Guida D, Lugli A. Use of DEMs Derived from TLS and HRSI Data for Landslide Feature Recognition. ISPRS International Journal of Geo-Information. 2018; 7(4):160. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7040160
Chicago/Turabian StyleBarbarella, Maurizio, Alessandro Di Benedetto, Margherita Fiani, Domenico Guida, and Andrea Lugli. 2018. "Use of DEMs Derived from TLS and HRSI Data for Landslide Feature Recognition" ISPRS International Journal of Geo-Information 7, no. 4: 160. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi7040160