A Method of Watershed Delineation for Flat Terrain Using Sentinel-2A Imagery and DEM: A Case Study of the Taihu Basin

Abstract
:
1. Introduction
2. Materials and Methods
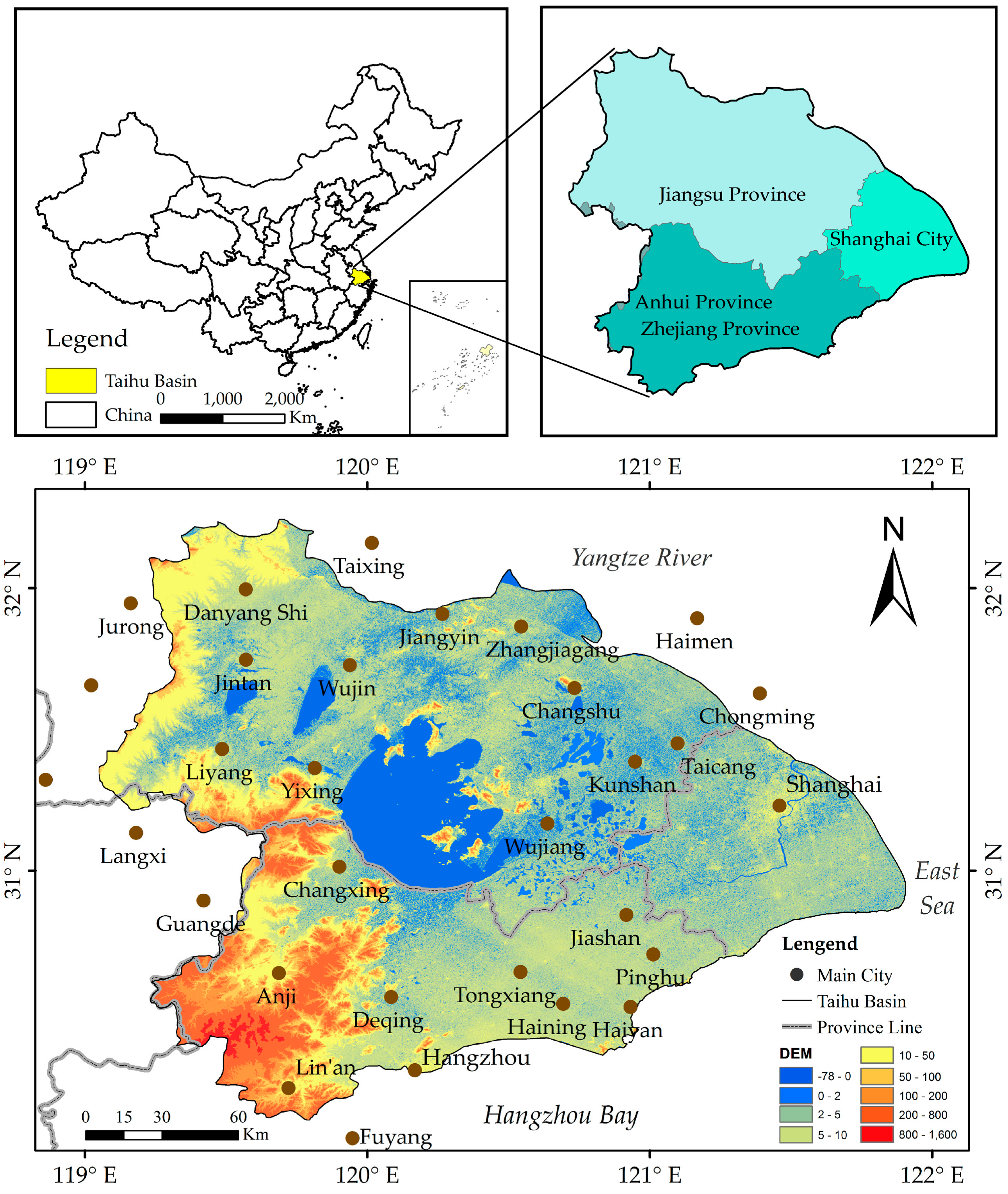
2.1. Study Area
2.2. Data Source
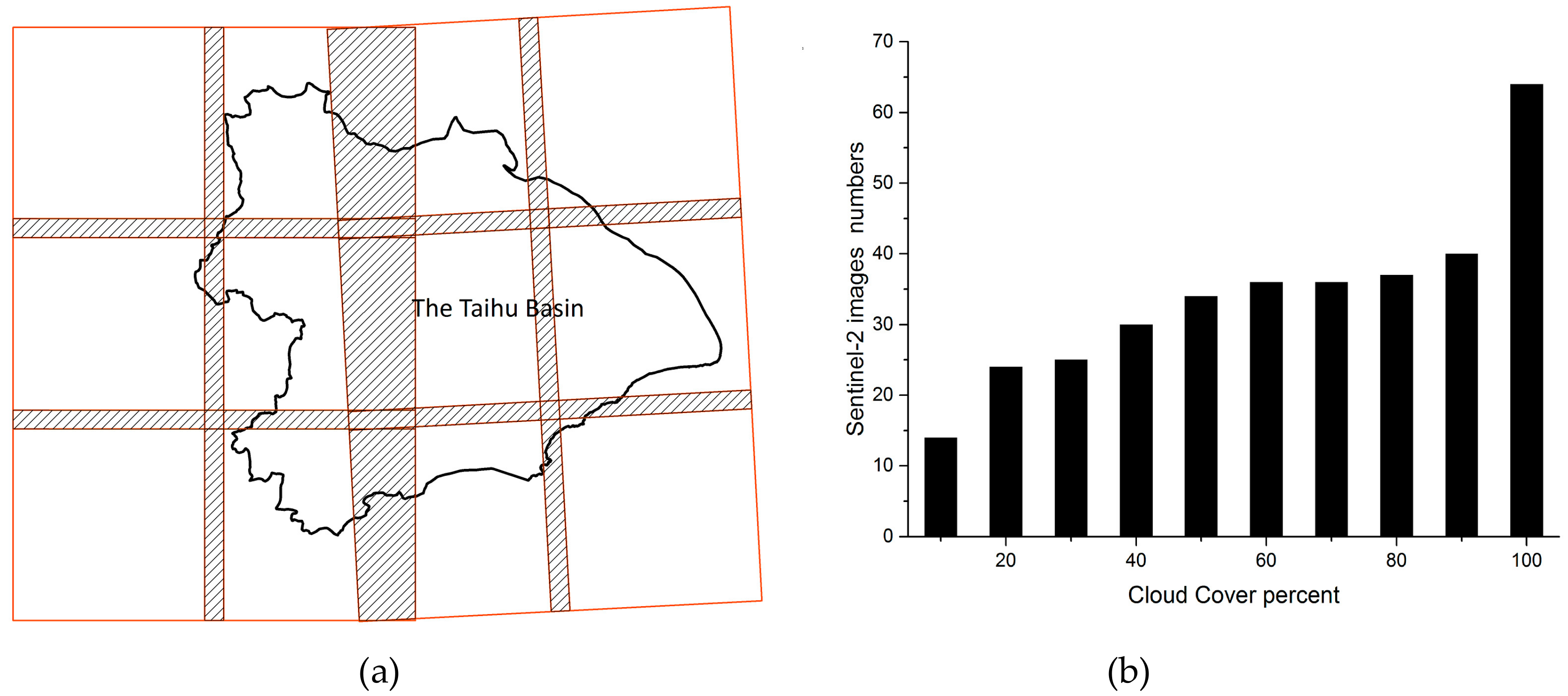
2.2.1. Sentinel-2 Images
2.2.2. DEM Data
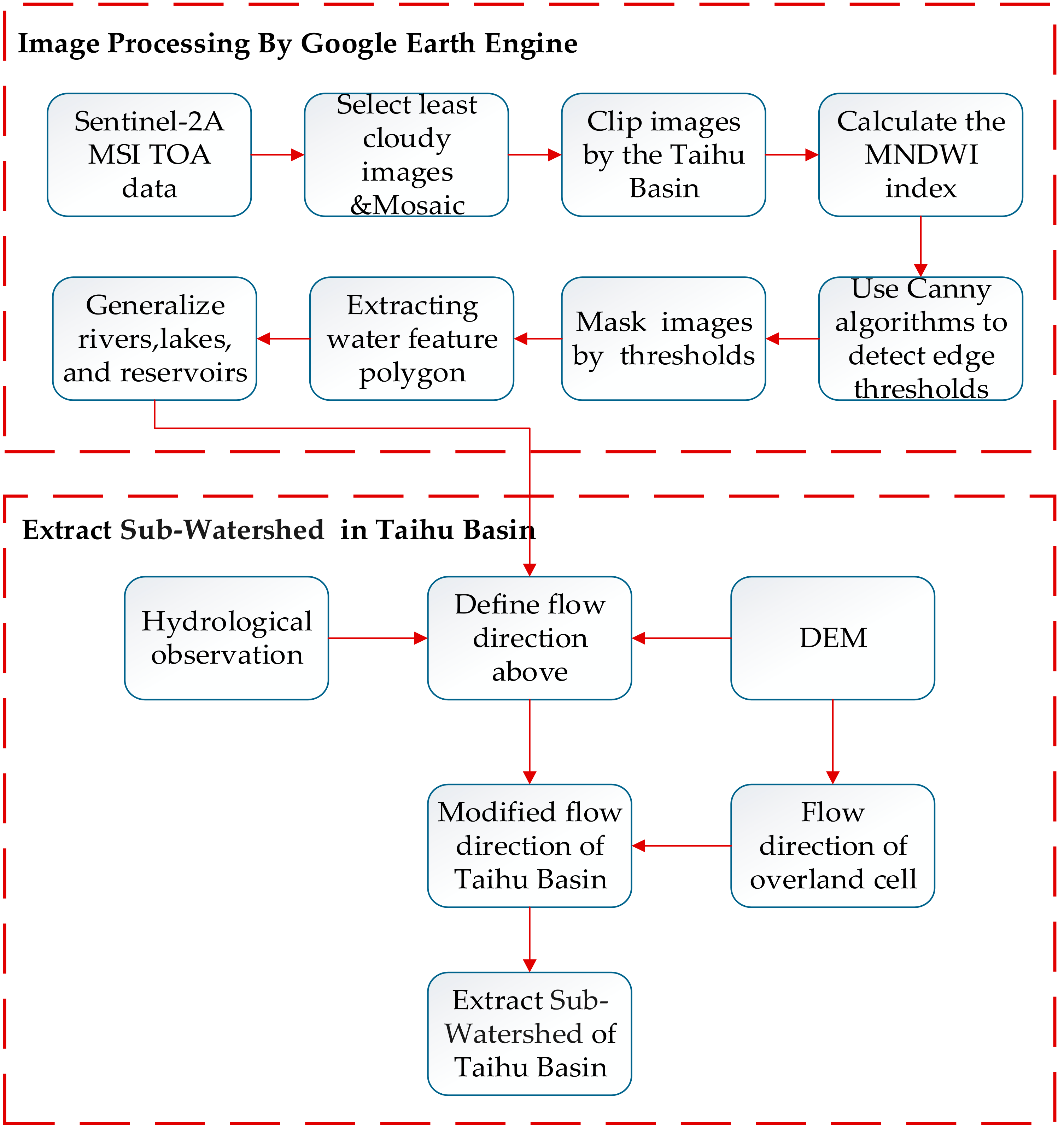
2.3. Processing Methods
2.3.1. MNDWI Index Introduction
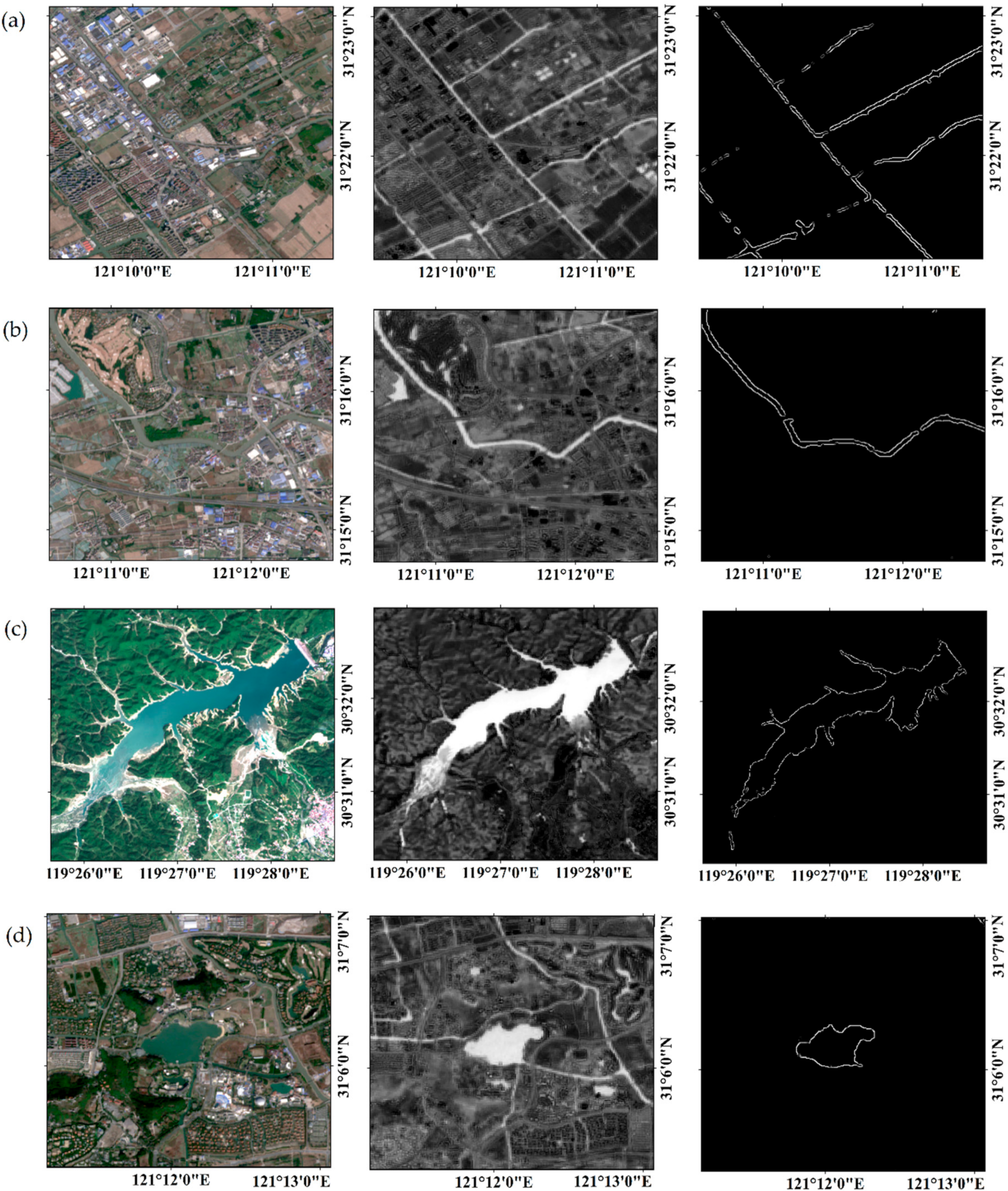
2.3.2. Canny Edge Detector for Extracting Water Polygons
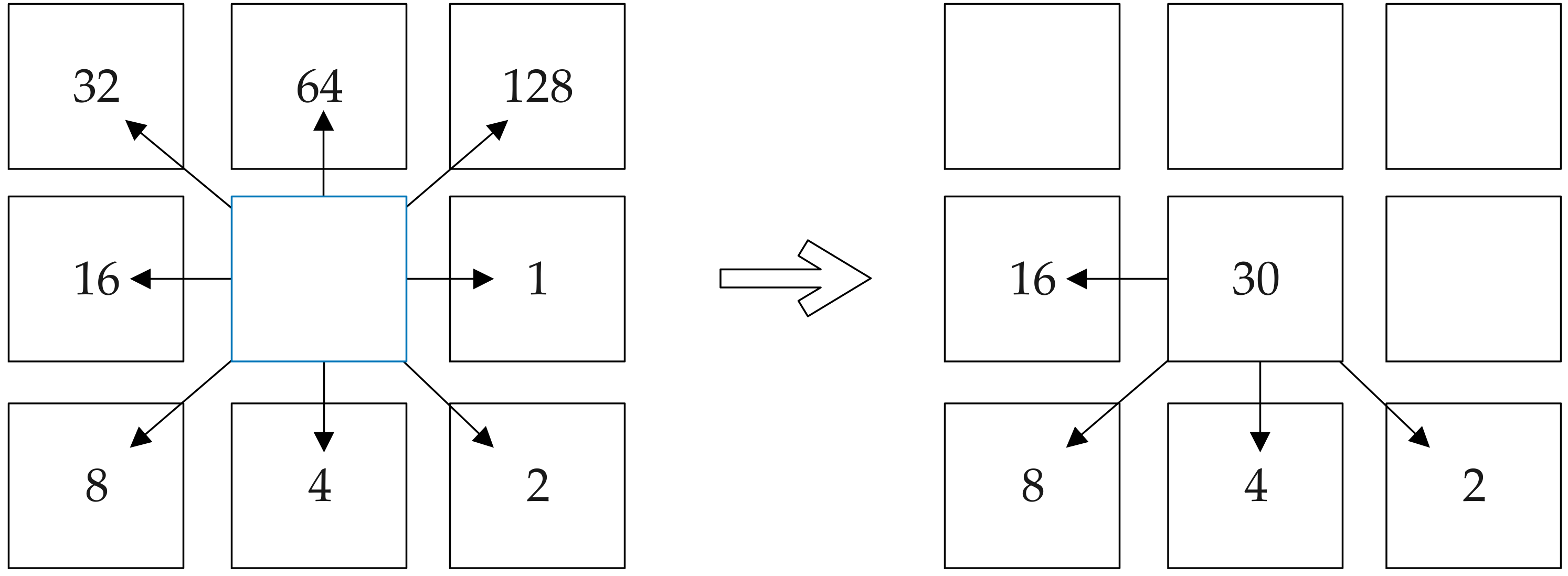
2.3.3. Flow Direction Determination for Each River, Lake, and Reservoir
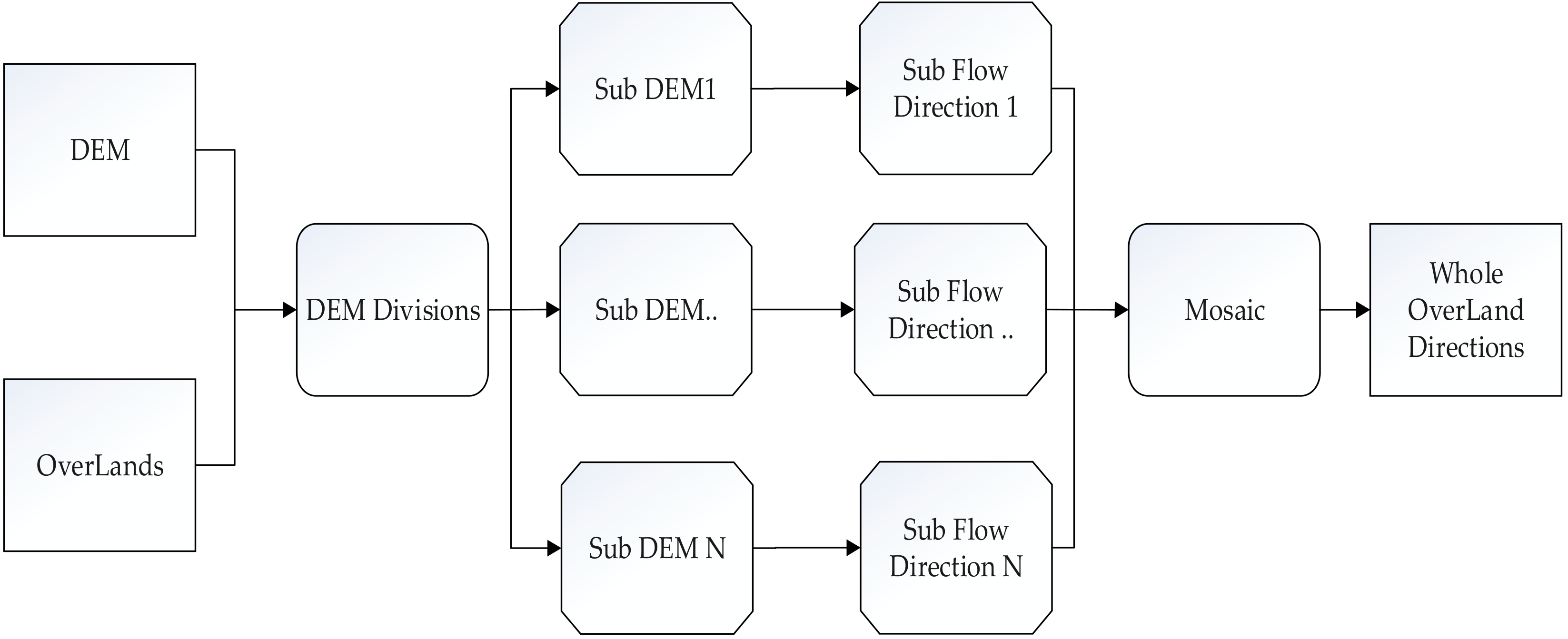
2.3.4. Flow Direction Determination for the Overland Flow
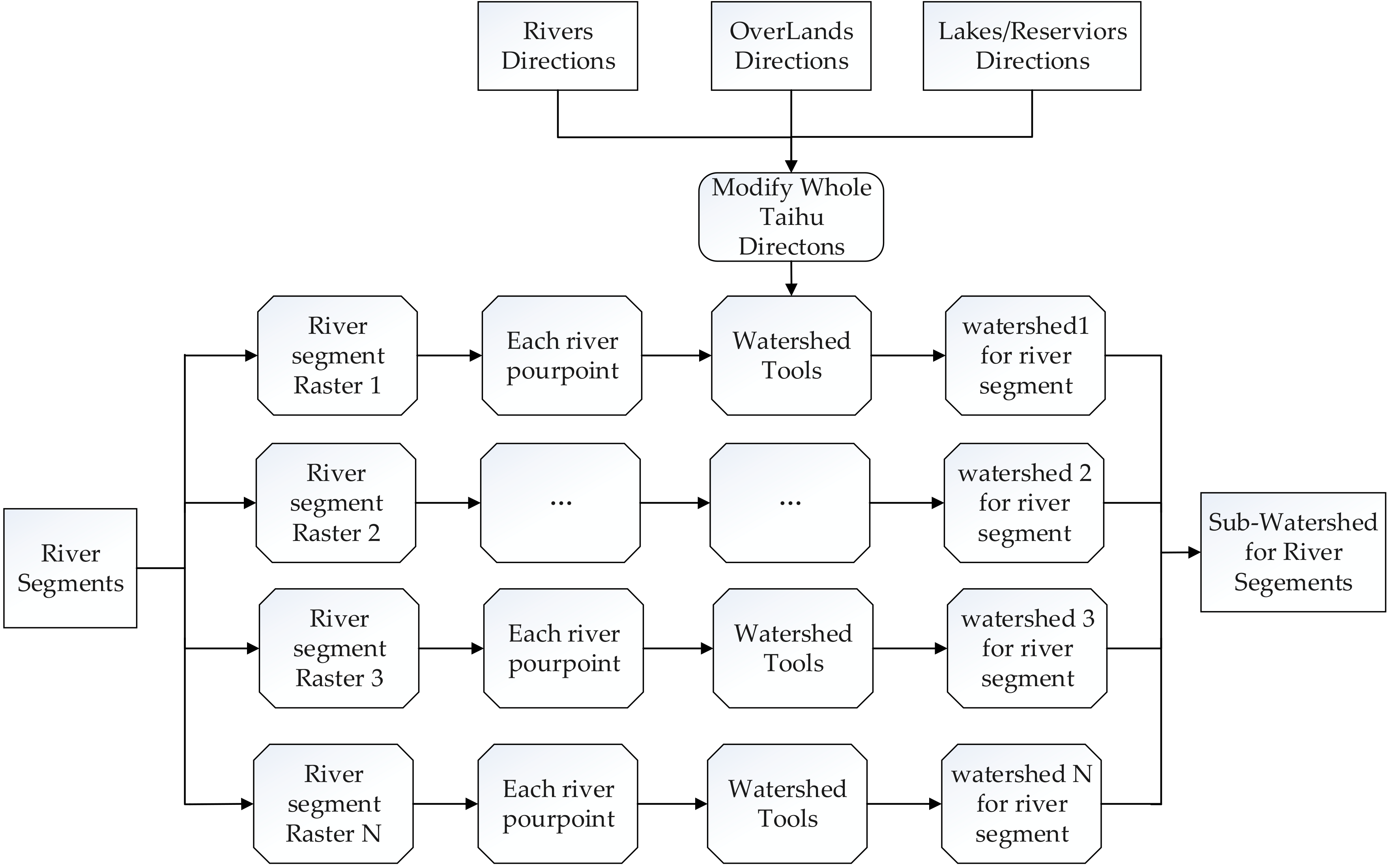
2.3.5. Subwatershed Division
3. Results
3.1. Accuracy Analysis for Waterbody Extraction
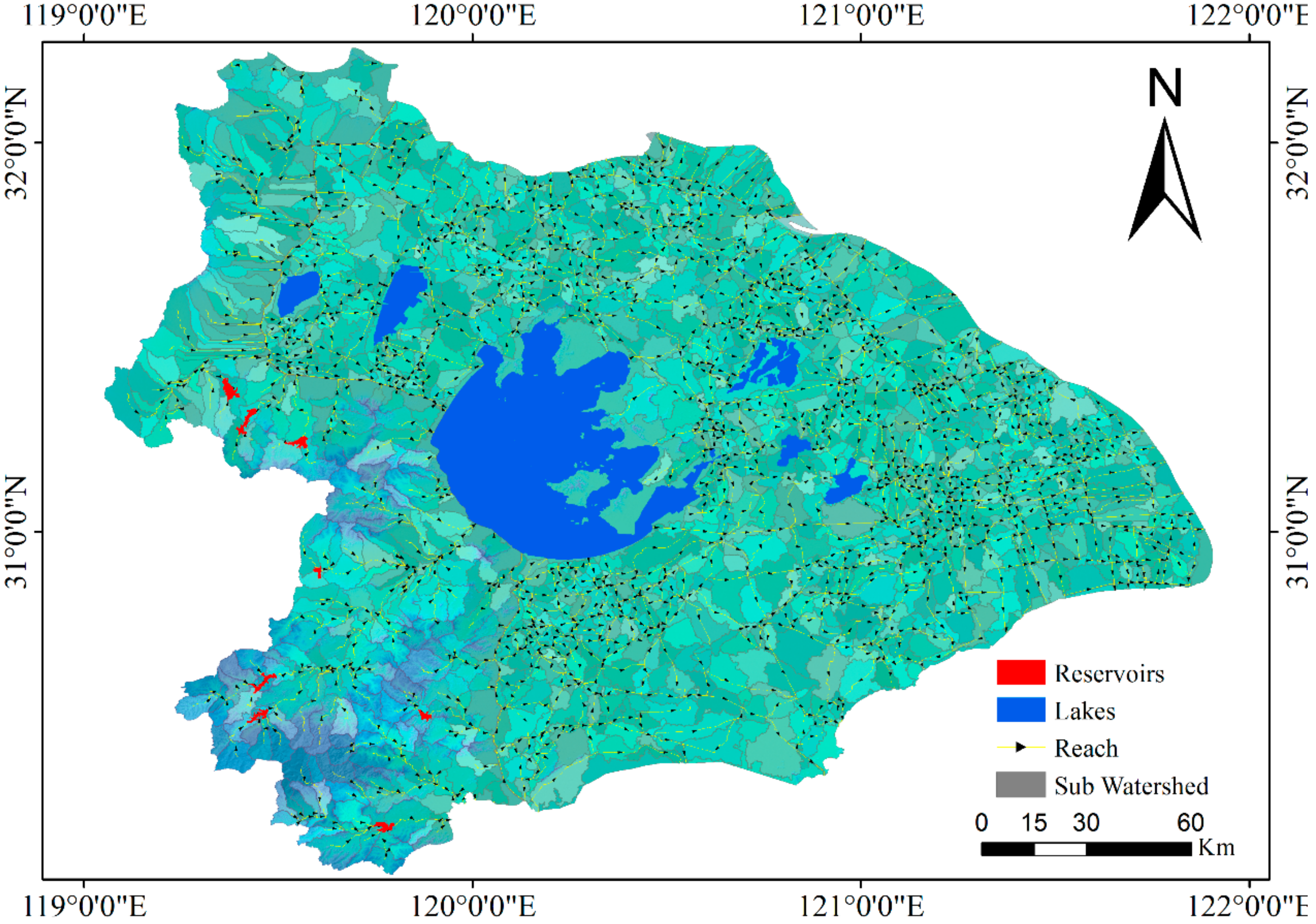
3.2. Drainage Networks and Catchment of the Taihu Basin
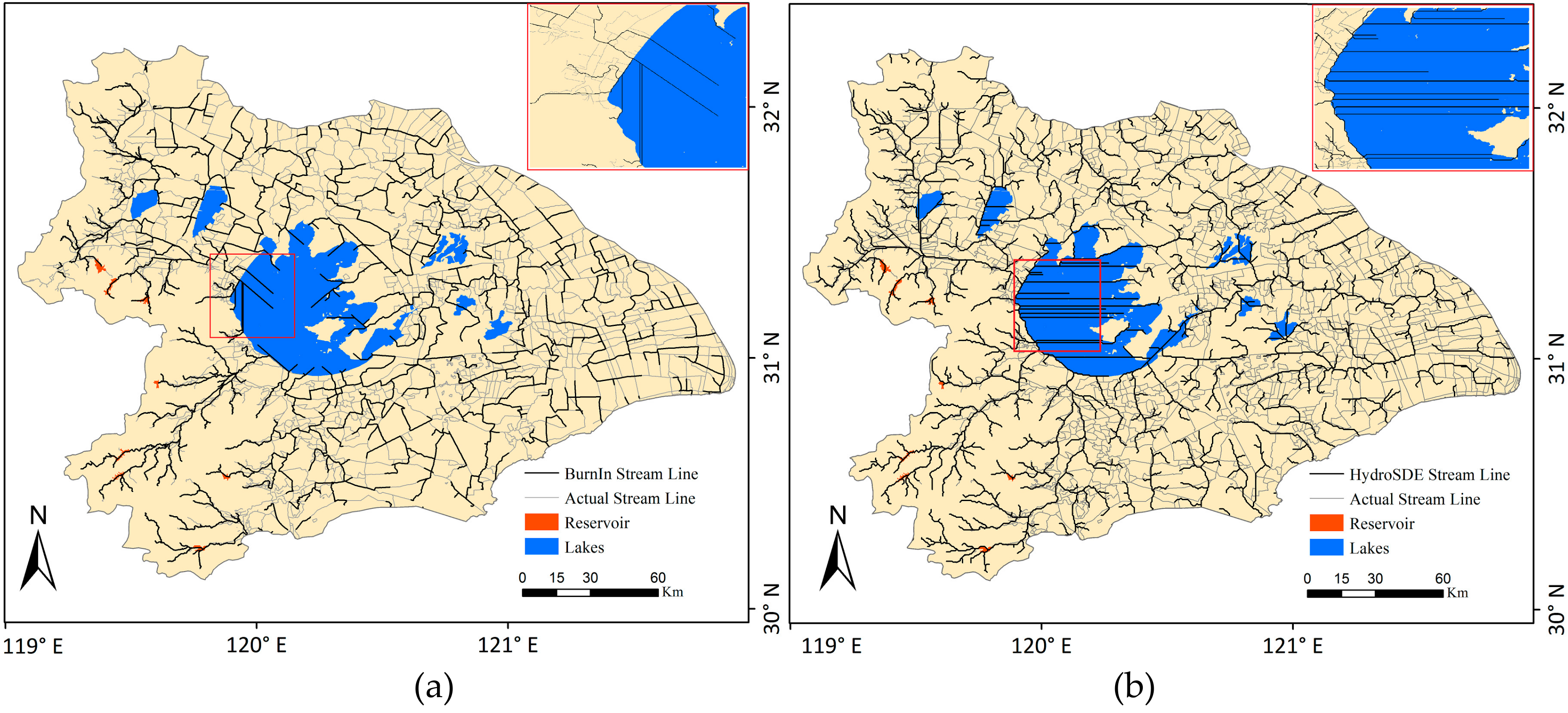
3.3. Comparison of the Stream Burning Methods in Arc Hydro and HydroSHEDS
4. Discussion
4.1. Differences from the Stream Burning Method
4.2. Catchments for Hydrological Simulation
4.3. Further Improvement
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Giannoni, F.; Roth, G.; Rudari, R. A procedure for drainage network identification from geomorphology and its application to the prediction of the hydrologic response. Adv. Water Resour. 2005, 28, 567–581. [Google Scholar] [CrossRef]
- Ogden, F.L.; Raj Pradhan, N.; Downer, C.W.; Zahner, J.A. Relative importance of impervious area, drainage density, width function, and subsurface storm drainage on flood runoff from an urbanized catchment. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef]
- Lin, C.Y.; Lin, W.T.; Chou, W.C. Soil erosion prediction and sediment yield estimation: The Taiwan experience. Soil Tillage Res. 2002, 68, 143–152. [Google Scholar] [CrossRef]
- Billen, G.; Garnier, J.; Rousseau, V. Nutrient fluxes and water quality in the drainage network of the Scheldt basin over the last 50 years. Hydrobiologia 2005, 540, 47–67. [Google Scholar] [CrossRef]
- Jenson, S.K. Applications of hydrologic information automatically extracted from digital elevation models. Hydrol. Process. 1991, 5, 31–44. [Google Scholar] [CrossRef]
- Tarboton, D.G.; Bras, R.L.; Rodriguez-Iturbe, I. On the extraction of channel networks from digital elevation data. Hydrol. Process. 1991, 5, 81–100. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Z. Drainage network extraction using LiDAR-derived DEM in volcanic plains. Area 2011, 43, 42–52. [Google Scholar] [CrossRef]
- Fairfield, J.; Leymarie, P. Drainage networks from grid digital elevation models. Water Resour. Res. 1991, 27, 709–717. [Google Scholar] [CrossRef]
- Baker, M.E.; Weller, D.E.; Jordan, T.E. Comparison of automated watershed delineations. Photogramm. Eng. Remote Sens. 2006, 72, 159–168. [Google Scholar] [CrossRef]
- Meisels, A.; Raizman, S.; Karnieli, A. Skeletonizing a DEM into a drainage network. Comput. Geosci. 1995, 21, 187–196. [Google Scholar] [CrossRef]
- Li, J.; Wong, D.W. Effects of DEM sources on hydrologic applications. Comput. Environ. Urban Syst. 2010, 34, 251–261. [Google Scholar] [CrossRef]
- Ariza-Villaverde, A.B.; Jiménez-Hornero, F.J.; De Ravé, E.G. Influence of DEM resolution on drainage network extraction: A multifractal analysis. Geomorphology 2015, 241, 243–254. [Google Scholar] [CrossRef]
- Chen, Y.; Wilson, J.P.; Zhu, Q.; Zhou, Q. Comparison of drainage-constrained methods for DEM generalization. Comput. Geosci. 2012, 48, 41–49. [Google Scholar] [CrossRef]
- Turcotte, R.; Fortin, J.P.; Rousseau, A.N.; Massicotte, S.; Villeneuve, J. Determination of the drainage structure of a watershed using a digital elevation model and a digital river and lake network. J. Hydrol. 2001, 240, 225–242. [Google Scholar] [CrossRef]
- Callow, J.N.; Van Niel, K.P.; Boggs, G.S. How does modifying a DEM to reflect known hydrology affect subsequent terrain analysis? J. Hydrol. 2007, 332, 30–39. [Google Scholar] [CrossRef]
- Stepinski, T.F.; Collier, M.L. Extraction of Martian valley networks from digital topography. J. Geophys. Res. Planets 2004, 109. [Google Scholar] [CrossRef]
- Mokarram, M.; Hojati, M. Comparis of digital elevation model (DEM) and aerial photographs for drainage. Model. Earth Syst. Environ. 2015, 1, 46. [Google Scholar] [CrossRef]
- Hopkinson, C.; Hayashi, M.; Peddle, D. Comparing alpine watershed attributes from LiDAR, photogrammetric, and contour-based digital elevation models. Hydrol. Process. 2009, 23, 451–463. [Google Scholar] [CrossRef]
- Xu, H.W.; He, J.; She, Y.J. Method for extraction of digital drainage network in the Qinhuai River basin based on DEM and remote sensing. J. Hohai Univ. 2008, 4, 443–447. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418. [Google Scholar] [CrossRef] [PubMed]
- Qin, B.; Xu, P.; Wu, Q.; Luo, L.; Zhang, Y. Environmental issues of lake Taihu, China. In Eutrophication of Shallow Lakes with Special Reference to Lake Taihu, China; Springer: Dordrecht, The Netherlands, 2007; pp. 3–14. [Google Scholar]
- Qin, B.; Zhu, G.; Gao, G.; Zhang, Y.; Li, W.; Paerl, H.W.; Carmichael, W.W. A drinking water crisis in Lake Taihu, China: Linkage to climatic variability and lake management. Environ. Manag. 2010, 45, 105–112. [Google Scholar] [CrossRef] [PubMed]
- Harvey, G.L.; Thorne, C.R.; Cheng, X.; Evans, E.P.; JD Simm, S.H.; Wang, Y. Qualitative analysis of future flood risk in the Taihu Basin, China. J. Flood Risk Manag. 2009, 2, 85–100. [Google Scholar] [CrossRef]
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating satellite-derived bathymetry (SDB) with the Google Earth Engine and Sentinel-2. Remote Sens. 2018, 10, 859. [Google Scholar] [CrossRef]
- Mateo-García, G.; Muñoz-Marí, J.; Gómez-Chova, L. Cloud detection on the Google Earth engine platform. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1942–1945. [Google Scholar]
- Yang, X.; Zhao, S.; Qin, X.; Zhao, N.; Liang, L. Mapping of urban surface water bodies from Sentinel-2 MSI imagery at 10 m resolution via NDWI-based image sharpening. Remote Sens. 2017, 9, 596. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water bodies’ mapping from Sentinel-2 imagery with modified normalized difference water index at 10-m spatial resolution produced by sharpening the SWIR band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef]
- Mudau, N.; Mhangara, P. Extraction of low cost houses from a high spatial resolution satellite imagery using Canny edge detection filter. S. Afr. J. Geomat. 2018, 7, 268–278. [Google Scholar] [CrossRef]
- Duan, R.; Li, Q.; Li, Y. Summary of image edge detection. Optical Technique. 2005, 3, 415–419. [Google Scholar]
- Yuan, L.; Xu, X. Adaptive image edge detection algorithm based on canny operator. In Proceedings of the 2015 4th International Conference on Advanced Information Technology and Sensor Application (AITS), Harbin, China, 21–23 August 2015; pp. 28–31. [Google Scholar]
- Yu, Y.; Zhang, Z.; Shokr, M.; Hui, F.; Cheng, X.; Chi, Z.; Chen, Z. Automatically Extracted Antarctic Coastline Using Remotely-Sensed Data: An Update. Remote Sens. 2019, 11, 1844. [Google Scholar] [CrossRef]
- Donchyts, G.; Schellekens, J.; Winsemius, H.; Eisemann, E. A 30 m resolution surface water mask including estimation of positional and thematic differences using landsat 8, srtm and openstreetmap: A case study in the Murray-Darling Basin, Australia. Remote Sens. 2016, 8, 386. [Google Scholar] [CrossRef]
- Jenson, S.K.; Domingue, J.O. Extracting topographic structure from digital elevation data for geographic information system analysis. Photogramm. Eng. Remote Sens. 1988, 54, 1593–1600. [Google Scholar]
- Seibert, J.; McGlynn, B.L. A new triangular multiple flow direction algorithm for computing upslope areas from gridded digital elevation models. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- Erskine, R.H.; Green, T.R.; Ramirez, J.A.; MacDonald, L.H. Comparison of grid-based algorithms for computing upslope contributing area. Water Resour. Res. 2006, 42. [Google Scholar] [CrossRef]
- Lai, Z.; Li, S.; Lv, G.; Pan, Z.; Fei, G. Watershed delineation using hydrographic features and a DEM in plain river network region. Hydrol. Process. 2016, 30, 276–288. [Google Scholar] [CrossRef]
- Zhao, G.J.; Gao, J.F.; Tian, P.; Tian, K. Comparison of two different methods for determining flow direction in catchment hydrological modeling. Water Sci. Eng. 2009, 2, 1–15. [Google Scholar]
- Ran, Y.; Li, X. First comprehensive fine-resolution global land cover map in the world from China—Comments on global land cover map at 30-m resolution. Sci. China Earth Sci. 2015, 58, 1677–1678. [Google Scholar] [CrossRef]
- Lehner, B.; Verdin, K.; Jarvis, A. New global hydrography derived from spaceborne elevation data. Eos Trans. Am. Geophys. Union 2008, 89, 93–94. [Google Scholar] [CrossRef]
- Gong, L.; Halldin, S.; Xu, C.Y. Global-scale river routing—an efficient time-delay algorithm based on HydroSHEDS high-resolution hydrography. Hydrol. Process. 2011, 25, 1114–1128. [Google Scholar] [CrossRef]
- Lindsay, J.B. The practice of DEM stream burning revisited. Earth Surf. Process. Landf. 2016, 41, 658–668. [Google Scholar] [CrossRef]
- Woodrow, K.; Lindsay, J.B.; Berg, A.A. Evaluating DEM conditioning techniques, elevation source data, and grid resolution for field-scale hydrological parameter extraction. J. Hydrol. 2016, 540, 1022–1029. [Google Scholar] [CrossRef]
- Liu, X.; Wang, N.; Shao, J.; Chu, X. An automated processing algorithm for flat areas resulting from DEM filling and interpolation. ISPRS Int. J. Geo Inf. 2017, 6, 376. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.; Tang, X.; Xie, J.; Song, W. Spatio-temporal super-resolution reconstruction of remote-sensing images based on adaptive multi-scale detail enhancement. Sensors 2018, 18, 498. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Graf, L.; Moreno-de-las-Heras, M.; Ruiz, M.; Calsamiglia, A.; García-Comendador, J.; Fortesa, J.; Estrany, J. Accuracy assessment of digital terrain model dataset sources for hydrogeomorphological modelling in small mediterranean catchments. Remote Sens. 2018, 10, 2014. [Google Scholar] [CrossRef] [Green Version]
- Hernandez, A.; Healey, S.; Huang, H.; Ramsey, R. Improved Prediction of Stream Flow Based on Updating Land Cover Maps with Remotely Sensed Forest Change Detection. Forests 2018, 9, 317. [Google Scholar] [CrossRef] [Green Version]
- Saleh, A.; Arnold, J.G.; Gassman, P.W.A.; Hauck, L.M.; Rosenthal, W.D.; Williams, J.R.; McFarland, A.M.S. Application of SWAT for the upper North Bosque River watershed. Trans. ASAE 2000, 43, 1077. [Google Scholar] [CrossRef]
- Molina-Navarro, E.; Nielsen, A.; Trolle, D. A QGIS plugin to tailor SWAT watershed delineations to lake and reservoir waterbodies. Environ. Model. Softw. 2018, 108, 67–71. [Google Scholar] [CrossRef]
- Farooq, M.; Shafique, M.; Khattak, M.S. Flood hazard assessment and mapping of River Swat using HEC-RAS 2D model and high-resolution 12-m TanDEM-X DEM (WorldDEM). Nat. Hazards 2019, 97, 477–492. [Google Scholar] [CrossRef]
- Cao, B.; Yang, S.; Ye, S. Integrated Application of Remote Sensing, GIS and Hydrological Modeling to Estimate the Potential Impact Area of Earthquake-Induced Dammed Lakes. Water 2017, 9, 777. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Wang, D.; Zhang, Z.; Ma, Z.; Guo, Z.; Ye, L. Analysis of Flood Risk of Urban Agglomeration Polders Using Multivariate Copula. Water 2018, 10, 1470. [Google Scholar] [CrossRef] [Green Version]
- Ji, S.; Qiuwen, Z. A GIS-based subcatchments division approach for SWMM. Open Civ. Eng. J. 2015, 9, 515–521. [Google Scholar] [CrossRef] [Green Version]
- Gu, H.; Li, H.; Yan, L.; Liu, Z.; Blaschke, T.; Soergel, U. An object-based semantic classification method for high resolution remote sensing imagery using ontology. Remote Sens. 2017, 9, 329. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sentinel-2 Bands | Wavelength (µm) | Resolution (m) |
|---|---|---|
| Band 2—Blue | 0.490 | 10 |
| Band 3—Green | 0.560 | 10 |
| Band 4—Red | 0.665 | 10 |
| Band 8—NIR | 0.842 | 10 |
| Band 11—SWIR | 1.610 | 20 |
| Waterbody (2018) | Water | No-Water | Sum Pixels | Accuracy |
|---|---|---|---|---|
| Water | 441 | 47 | 488 | |
| No Water | 59 | 453 | 512 | OA = 89.3% |
| Sum reference pixels | 500 | 500 | Kappa = 79.3% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Yang, J.; Wu, J. A Method of Watershed Delineation for Flat Terrain Using Sentinel-2A Imagery and DEM: A Case Study of the Taihu Basin. ISPRS Int. J. Geo-Inf. 2019, 8, 528. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8120528
Li L, Yang J, Wu J. A Method of Watershed Delineation for Flat Terrain Using Sentinel-2A Imagery and DEM: A Case Study of the Taihu Basin. ISPRS International Journal of Geo-Information. 2019; 8(12):528. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8120528
Chicago/Turabian StyleLi, Leilei, Jintao Yang, and Jin Wu. 2019. "A Method of Watershed Delineation for Flat Terrain Using Sentinel-2A Imagery and DEM: A Case Study of the Taihu Basin" ISPRS International Journal of Geo-Information 8, no. 12: 528. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8120528