An Experimental Research on the Use of Recurrent Neural Networks in Landslide Susceptibility Mapping

 , , , and
, , , and
Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Machine Learning Algorithm | Ref. | Year | Natural Hazard | Model Performance |
|---|---|---|---|---|
| Logistic Tegression | [43] | 2018 | Earthquake; Geological susceptibility | NA |
| Multilayer Perceptron (MLP); Cascade Forward Neural Network (CFNN) | [14] | 2015 | Landslide; Susceptibility | For MLP model AUC = 70.90–81.11; For CFNN model 70.91–81.62 |
| Neural Networks (NN); Support Vector Machines (SVM); Evolutionary Algorithm (EA) | [44] | 2017 | Earthquake; Trigger mechanism | For NN model Error = 0.14% and Sensitivity = 99.94% For SVM model Error = 0.27% and Sensitivity = 99.78% For EA model Error = 0.34% and Sensitivity = 99.86% |
| Self Organizing Maps (SOM) | [45] | 2017 | Coastal Hazards; Risk index | NA |
| Extreme Learning Adaptive Neuro-Fuzzy Inference system (ELANFIS) | [46] | 2017 | Landslide; Displacement prediction | For ELANFIS Coefficient of Correlation (R) = 0.9796–0.9945 |
| Adaptive Neuro-Fuzzy Inference Systems (ANFIS); Ant Colony Optimization (ACO); Genetic Algorithm (GA); Particle Swarm Optimization (PSO); | [47] | 2018 | Flood; Susceptibility | For ANFIS-ACO model Area Under ROC Curve (AUC) = 0.918; For ANFIS-GA model (AUC) = 0.926; For ANFIS-PSO model (AUC) = 0.945 |
| Genetic Programming (GP) | [48] | 2018 | Coastal inundation; Total and infragravity swash elevations | For total swash RMSE = 0.272; For infragravity RMSE = 0.216; Compared with the formulation of [49]; For total swash RMSE = 0.570; For infragravity RMSE = 0.334; |
| Decision Tree (DT) | [31] | 2017 | Flood; Mapping | For DT model Average Accuracy = 67% |
| Classification and regression trees; Random Forests (RF) | [50] | 2018 | Lightning; Distinguishing nonlightning and lightning days | For RF model Hit Rate (HR) = 0.92 |
| Random Forest (RF) | [51] | 2016 | Storm; Forest damage prediction | Storm-damaged timber (RF model) was evaluated as a function of maximum gust speed classes (Least Squares Boosting model R20.99) of Lothar |
| Random Forest (RF) | [52] | 2015 | Flood; Susceptibility | For RF model error rate of 5-fold cross-validation using 5000 samples and 10,000 classification trees = 8.76 |
| Random Forest (RF) | [53] | 2013 | Wildfire; Spatial interpolation | For RF model Relative Root Mean Square Error (RRMSE) = 25% |
| Weighted Random Forest (WRF) | [54] | 2016 | Sinkhole; Extraction | For WRF model Accuracy = 73.96% |
| Random Forest (RF); Boosted Regression Tree (BRT) | [13] | 2012 | Shallow translational landslide; Susceptibility; Analyzing driving forces | For the models RF and BRT AUC0.9 |
| Random Forest (RF); Support Vector Machine (SVM) | [30] | 2015 | Landslide; Detection | For RF model Accuracy = 79.43–91% For SVM model Accuracy = 78.37–87.34% |
| Support Vector Machine (SVM) | [55] | 2015 | Flood; Susceptibility | For SVM model with different kernel types area values under prediction rate curves = 81.88-84.97% |
| Support Vector Machine (SVM) | [12] | 2008 | Landslide; Susceptibility | For two-class and one class SVM models success rate curve evaluations |
| Support Vector Machine (SVM); Artificial Neural Network (ANN) | [15] | 2018 | Colluvial landslide; Rockfall; Susceptibility | For colluvial landslide SVM model Area Under ROC Curve (AUC) = 0.917; ANN model AUC = 0.852; For rockfall SVM model AUC = 0.932; ANN model AUC = 0.906 |
| Support Vector Regression (SVR); Multilayer Perceptron (MLP) | [56] | 2009 | Climate; Temperature; Temperature inversion mapping | For SVR model RMSE = 0.47; For MLP model RMSE = 0.46 |
| Mutilayer Perceptron (MLP) | [57] | 2019 | Landslide; Susceptibility | AUC = 0.90 |
| Logistic Regression (LR); Random Forests (RF); Artificial Neural Network (ANN) | [58] | 2019 | Landslide; Susceptibility | AUC for LR = 0.76; AUC for RF = 0.95; AUC for ANN = 0.84 |
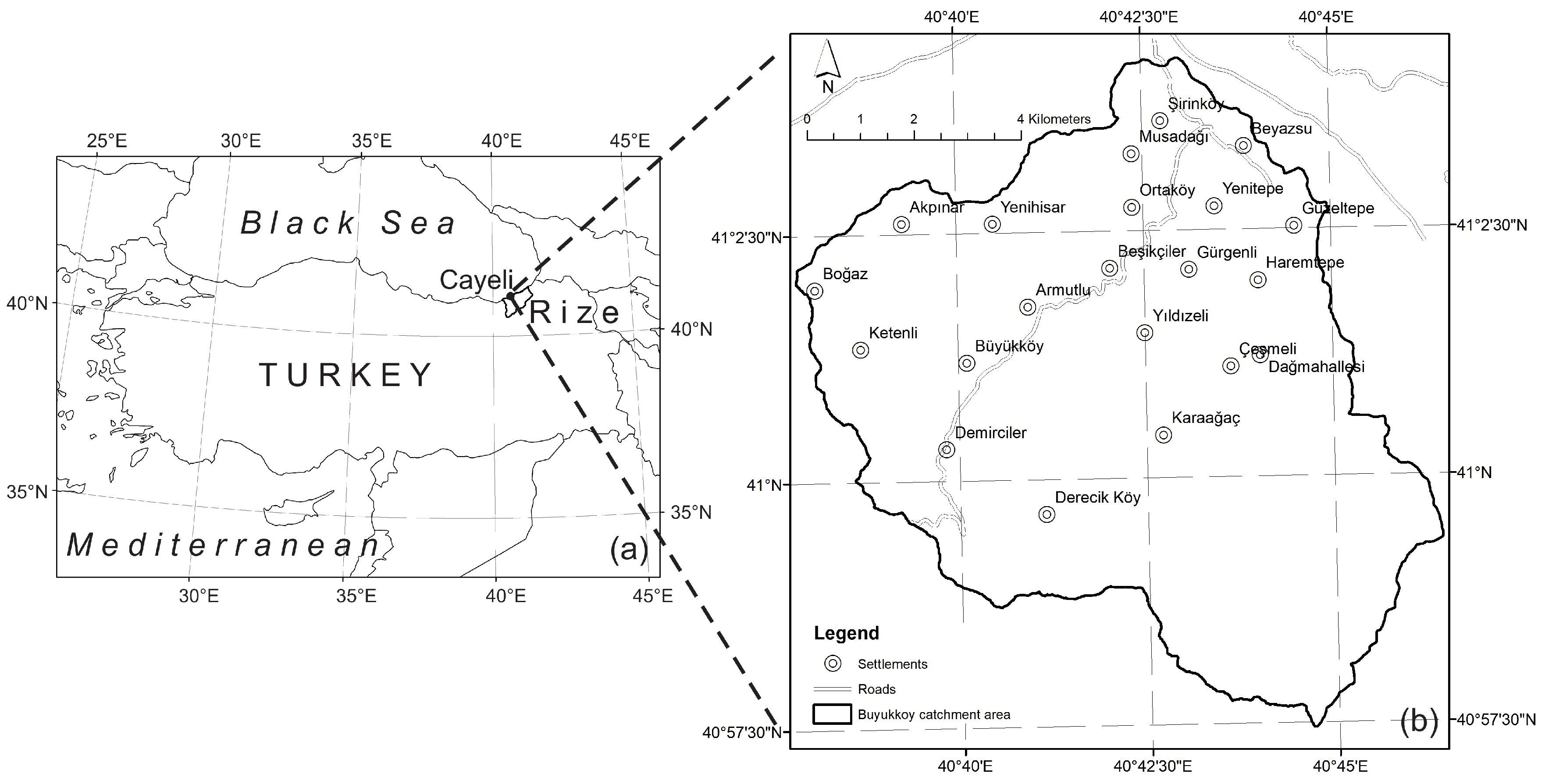
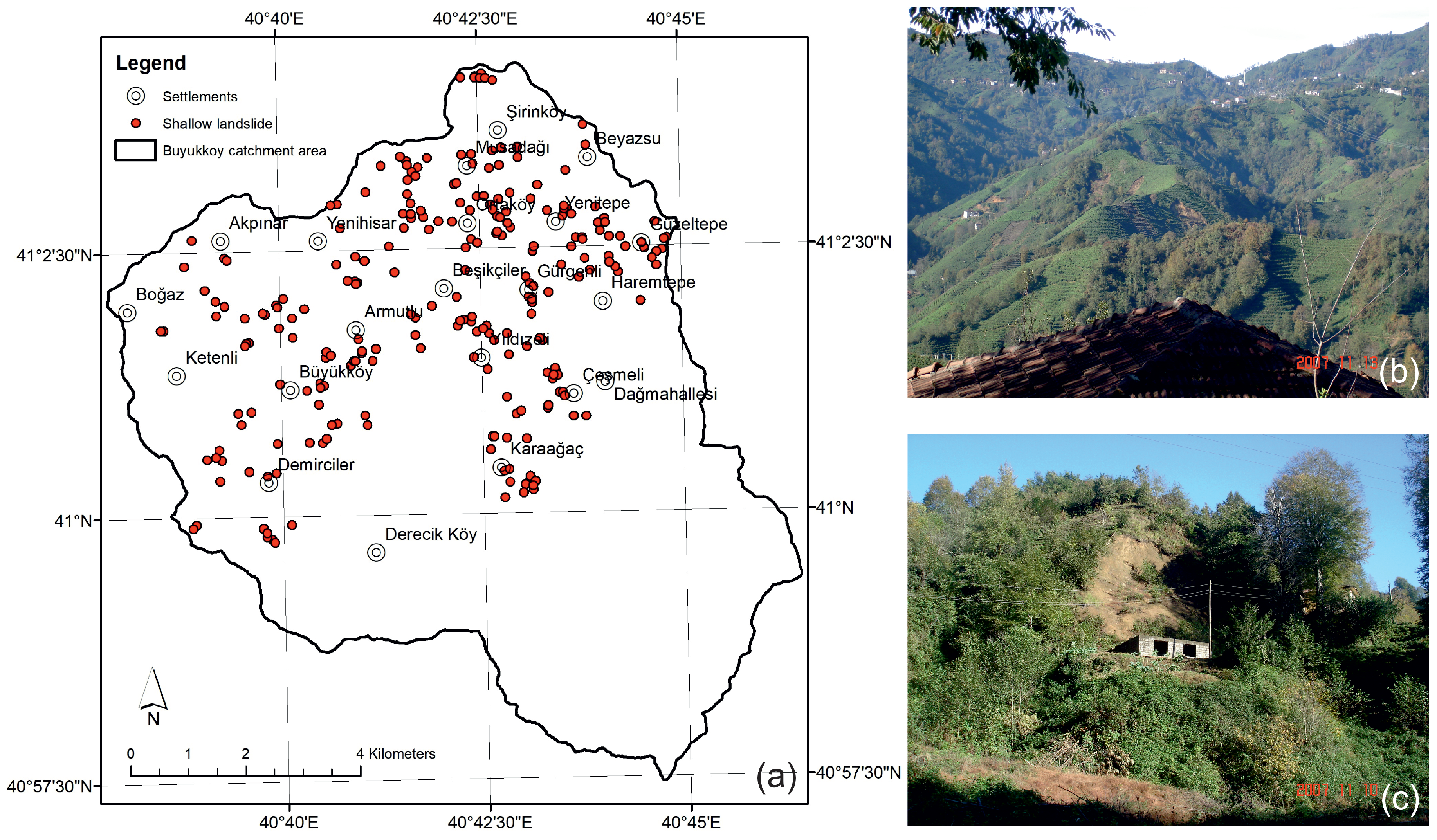
2. General Characteristics of the Study Area
3. Data
4. Methodological Background
5. Landslide Mapping
5.1. Landslide Susceptibility Mapping
5.1.1. Objective
5.1.2. Stratified Sampling
5.1.3. Implementation
- RNN cell: LSTM
- Loss function: Softmax cross-entropy
- Optimizer: Gradient descent algorithm
- Batch-size: 32
- Learning rate: 0.01
- Implementation: Tensorflow
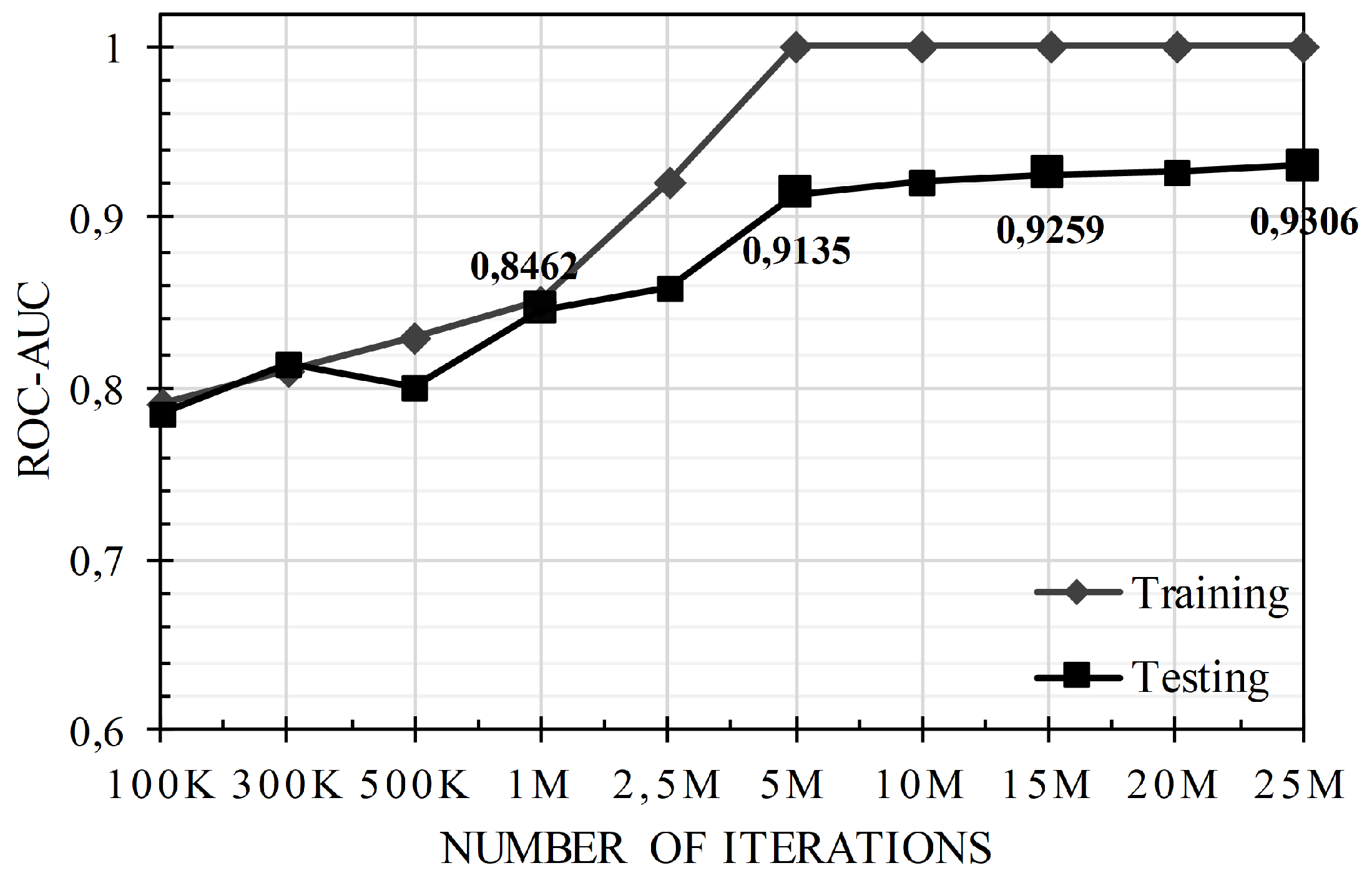
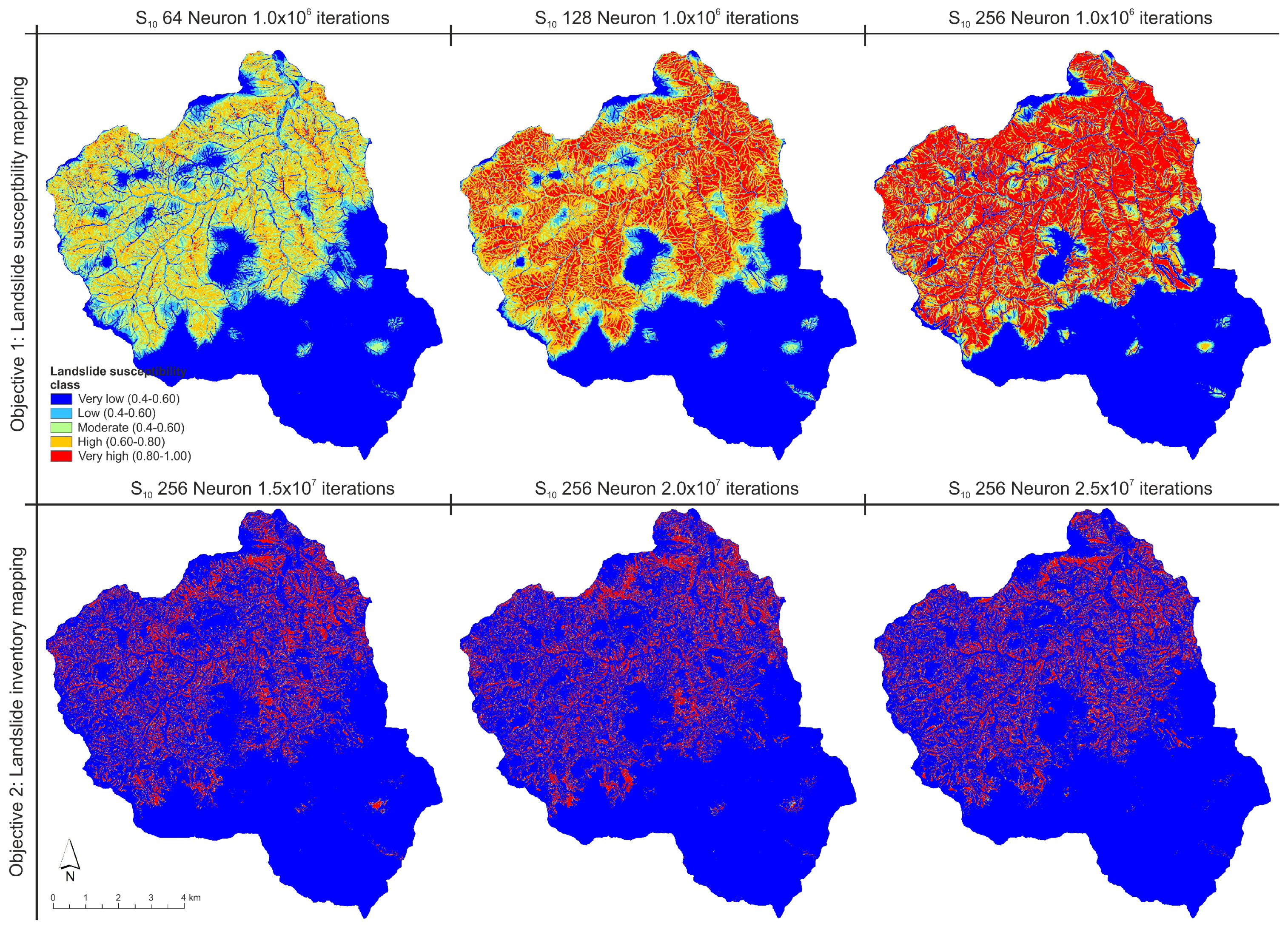
5.1.4. Results
5.2. Landslide Inventory Mapping
5.2.1. Objectives
5.2.2. Time-Based Sampling
5.2.3. Implementation
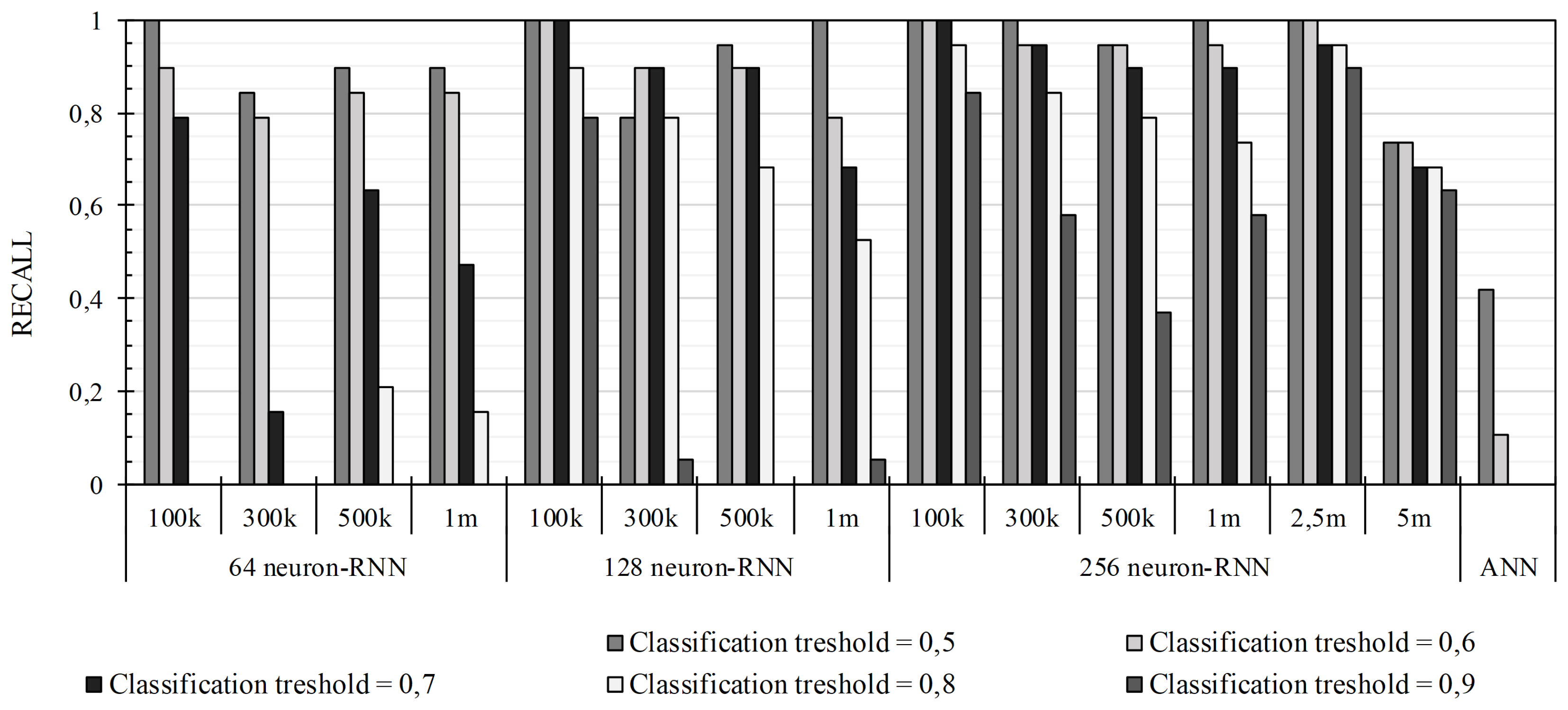
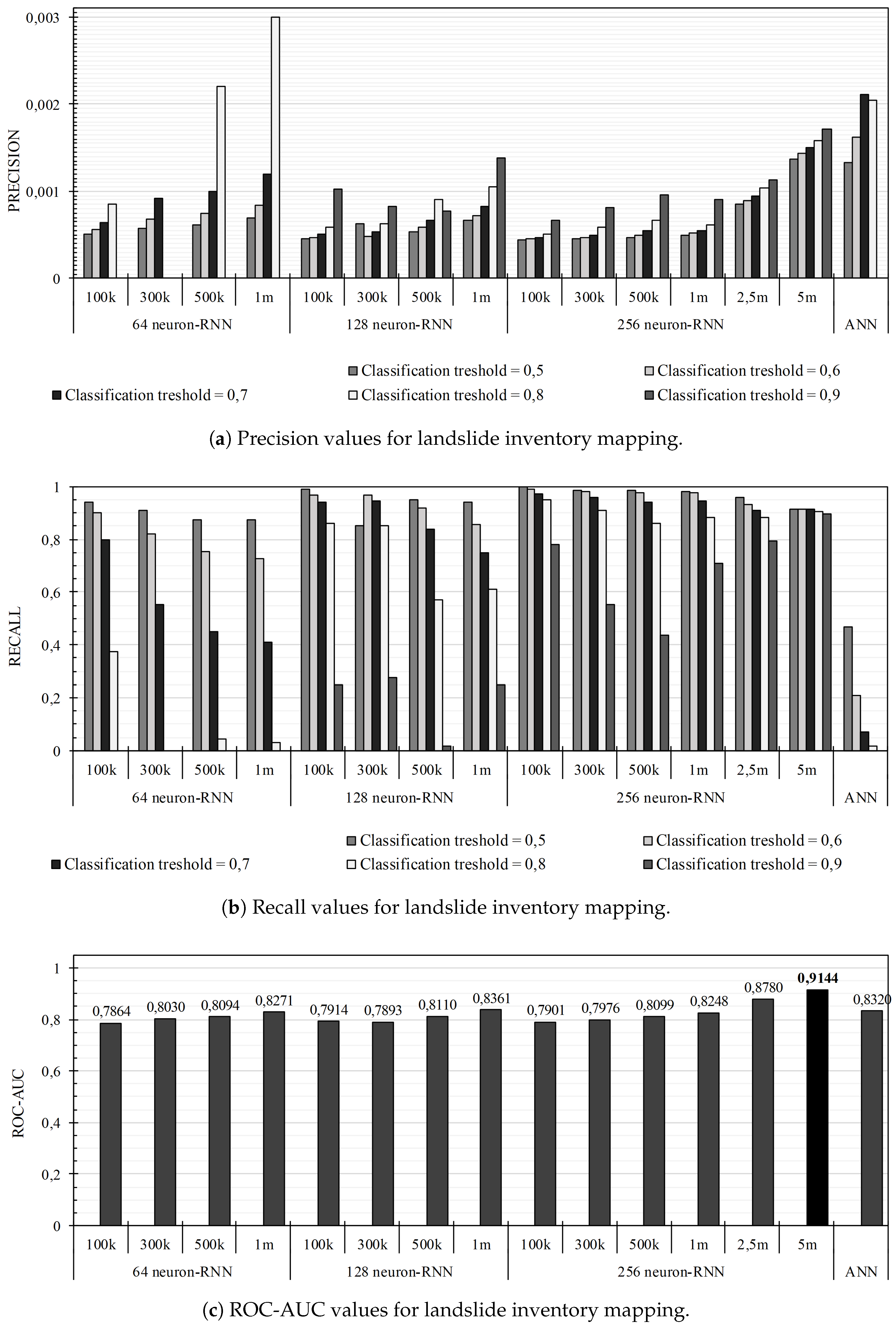
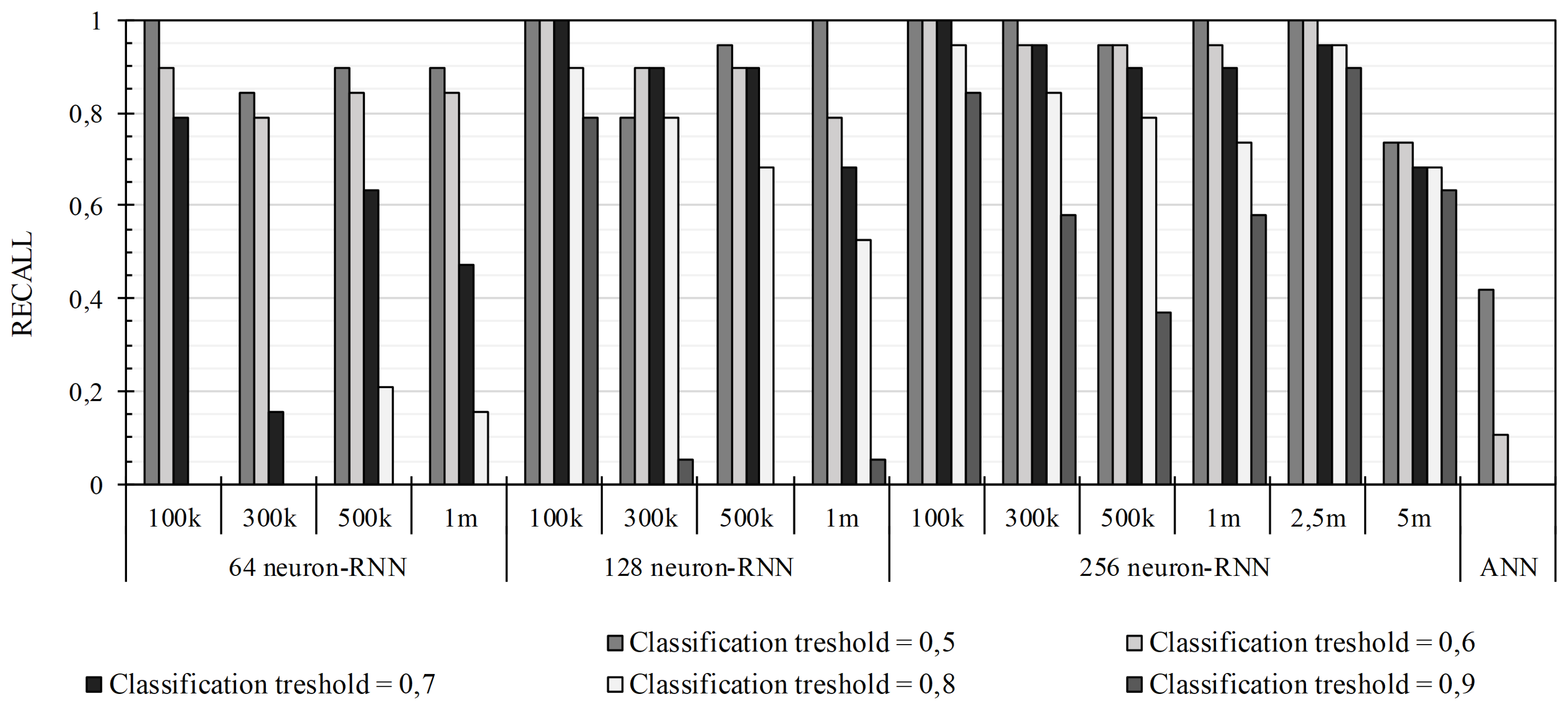
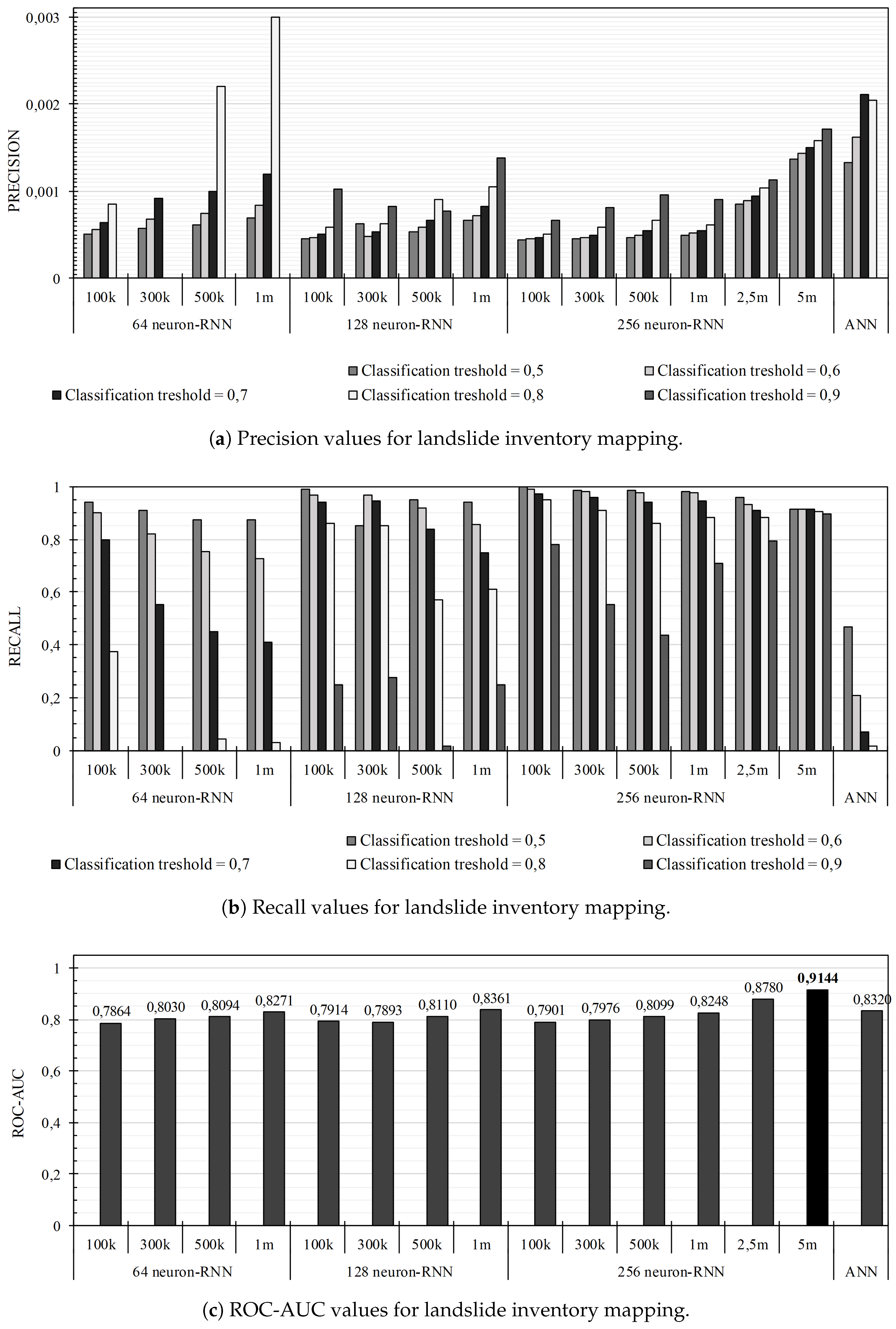
5.2.4. Results
6. Discussions and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vogel, K.; Riggelsen, C.; Korup, O.; Scherbaum, F. Bayesian network learning for natural hazard analyses. Nat. Hazards Earth Syst. Sci. 2014, 14, 2605–2626. [Google Scholar] [CrossRef] [Green Version]
- Jaafari, A.; Zenner, E.K.; Panahi, M.; Shahabi, H. Hybrid artificial intelligence models based on a neuro-fuzzy system and metaheuristic optimization algorithms for spatial prediction of wildfire probability. Agric. For. Meteorol. 2019, 266, 198–207. [Google Scholar] [CrossRef]
- Taheri, K.; Shahabi, H.; Chapi, K.; Shirzadi, A.; Gutiérrez, F.; Khosravi, K. Sinkhole susceptibility mapping: A comparison between Bayes-based machine learning algorithms. Land Degrad. Dev. 2019, 30, 730–745. [Google Scholar] [CrossRef]
- Ahmadlou, M.; Karimi, M.; Alizadeh, S.; Shirzadi, A.; Parvinnejhad, D.; Shahabi, H.; Panahi, M. Flood susceptibility assessment using integration of adaptive network-based fuzzy inference system (ANFIS) and biogeography-based optimization (BBO) and BAT algorithms (BA). Geocarto Int. 2019, 34, 1252–1272. [Google Scholar] [CrossRef]
- Bui, D.T.; Panahi, M.; Shahabi, H.; Singh, V.P.; Shirzadi, A.; Chapi, K.; Khosravi, K.; Chen, W.; Panahi, S.; Li, S.; et al. Novel hybrid evolutionary algorithms for spatial prediction of floods. Sci. Rep. 2018, 8, 15364. [Google Scholar] [CrossRef] [Green Version]
- Khosravi, K.; Pham, B.T.; Chapi, K.; Shirzadi, A.; Shahabi, H.; Revhaug, I.; Prakash, I.; Bui, D.T. A comparative assessment of decision trees algorithms for flash flood susceptibility modeling at Haraz watershed, northern Iran. Sci. Total Environ. 2018, 627, 744–755. [Google Scholar] [CrossRef]
- Roodposhti, M.S.; Safarrad, T.; Shahabi, H. Drought sensitivity mapping using two one-class support vector machine algorithms. Atmos. Res. 2017, 193, 73–82. [Google Scholar] [CrossRef]
- Azareh, A.; Rahmati, O.; Rafiei-Sardooi, E.; Sankey, J.B.; Lee, S.; Shahabi, H.; Ahmad, B.B. Modelling gully-erosion susceptibility in a semi-arid region, Iran: Investigation of applicability of certainty factor and maximum entropy models. Sci. Total Environ. 2019, 655, 684–696. [Google Scholar] [CrossRef]
- Tien Bui, D.; Shahabi, H.; Omidvar, E.; Shirzadi, A.; Geertsema, M.; Clague, J.J.; Khosravi, K.; Pradhan, B.; Pham, B.T.; Chapi, K.; et al. Shallow landslide prediction using a novel hybrid functional machine learning algorithm. Remote Sens. 2019, 11, 931. [Google Scholar] [CrossRef] [Green Version]
- Alizadeh, M.; Alizadeh, E.; Asadollahpour Kotenaee, S.; Shahabi, H.; Beiranvand Pour, A.; Panahi, M.; Bin Ahmad, B.; Saro, L. Social vulnerability assessment using artificial neural network (ANN) model for earthquake hazard in Tabriz city, Iran. Sustainability 2018, 10, 3376. [Google Scholar] [CrossRef] [Green Version]
- Tien Bui, D.; Shahabi, H.; Shirzadi, A.; Chapi, K.; Pradhan, B.; Chen, W.; Khosravi, K.; Panahi, M.; Bin Ahmad, B.; Saro, L. Land subsidence susceptibility mapping in south korea using machine learning algorithms. Sensors 2018, 18, 2464. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yao, X.; Tham, L.G.; Dai, F.C. Landslide susceptibility mapping based on Support Vector Machine: A case study on natural slopes of Hong Kong, China. Geomorphology 2008, 101, 572–582. [Google Scholar] [CrossRef]
- Vorpahl, P.; Elsenbeer, H.; Märker, M.; Schröder, B. How can statistical models help to determine driving factors of landslides? Ecol. Model. 2012, 239, 27–39. [Google Scholar] [CrossRef]
- Al-Batah, M.S.; Alkhasawneh, M.S.; Tay, L.T.; Ngah, U.K.; Hj Lateh, H.; Mat Isa, N.A. Landslide Occurrence Prediction Using Trainable Cascade Forward Network and Multilayer Perceptron. Math. Probl. Eng. 2015, 2015, 512158. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Yin, K.; Cao, Y.; Ahmed, B.; Li, Y.; Catani, F.; Pourghasemi, H.R. Landslide susceptibility modeling applying machine learning methods: A case study from Longju in the Three Gorges Reservoir area, China. Comput. Geosci. 2018, 112, 23–37. [Google Scholar] [CrossRef] [Green Version]
- Shirzadi, A.; Soliamani, K.; Habibnejhad, M.; Kavian, A.; Chapi, K.; Shahabi, H.; Chen, W.; Khosravi, K.; Thai Pham, B.; Pradhan, B.; et al. Novel GIS based machine learning algorithms for shallow landslide susceptibility mapping. Sensors 2018, 18, 3777. [Google Scholar] [CrossRef]
- Pham, B.T.; Prakash, I.; Singh, S.K.; Shirzadi, A.; Shahabi, H.; Tran, T.-T.-T.; Bui, D.T. Landslide susceptibility modeling using Reduced Error Pruning Trees and different ensemble techniques: Hybrid machine learning approaches. Catena 2019, 175, 203–218. [Google Scholar] [CrossRef]
- Ozer, B.; Mutlu, B.; Nefeslioglu, H.; Sezer, E.; Rouai, M.; Dekayir, A.; Gokceoglu, C. On the use of hierarchical fuzzy inference systems (HFIS) in expert-based landslide susceptibility mapping: The central part of the Rif Mountains (Morocco). Bull. Eng. Geol. Environ. 2019, 1–18. [Google Scholar] [CrossRef]
- Kayastha, P.; Dhital, M.R.; De Smedt, F. Application of the analytical hierarchy process (AHP) for landslide susceptibility mapping: A case study from the Tinau watershed, west Nepal. Comput. Geosci. 2013, 52, 398–408. [Google Scholar] [CrossRef]
- Kayastha, P.; Dhital, M.R.; De Smedt, F. Landslide susceptibility mapping using the weight of evidence method in the Tinau watershed, Nepal. Nat. Hazards 2012, 63, 479–498. [Google Scholar] [CrossRef]
- Dou, J.; Paudel, U.; Oguchi, T.; Uchiyama, S.; Hayakavva, Y.S. Shallow and Deep-Seated Landslide Differentiation Using Support Vector Machines: A Case Study of the Chuetsu Area, Japan. Terr. Atmos. Ocean. Sci. 2015, 26, 227–239. [Google Scholar] [CrossRef] [Green Version]
- Kavzoglu, T.; Colkesen, I.; Sahin, E.K. Machine learning techniques in landslide susceptibility mapping: A survey and a case study. In Landslides: Theory, Practice and Modelling; Springer: New York, NY, USA, 2019; pp. 283–301. [Google Scholar]
- Dou, J.; Yamagishi, H.; Zhu, Z.; Yunus, A.; Chen, C. A comparative study of the Binary Logistic Regression (BLR) and Artificial Neural Network (ANN) models for GIS-based spatial predicting landslides at a regional scale. In Landslide Dynamics: ISDR-ICL Landslide Interactive Teaching Tools; Springer: Berlin/Heidelberg, Germany, 2018; Volume 1, pp. 139–151. [Google Scholar]
- Shirzadi, A.; Bui, D.T.; Pham, B.T.; Solaimani, K.; Chapi, K.; Kavian, A.; Shahabi, H.; Revhaug, I. Shallow landslide susceptibility assessment using a novel hybrid intelligence approach. Environ. Earth Sci. 2017, 76, 60. [Google Scholar] [CrossRef]
- Nguyen, V.V.; Pham, B.T.; Vu, B.T.; Prakash, I.; Jha, S.; Shahabi, H.; Shirzadi, A.; Ba, D.N.; Kumar, R.; Chatterjee, J.M.; et al. Hybrid machine learning approaches for landslide susceptibility modeling. Forests 2019, 10, 157. [Google Scholar] [CrossRef] [Green Version]
- Jaafari, A.; Panahi, M.; Pham, B.T.; Shahabi, H.; Bui, D.T.; Rezaie, F.; Lee, S. Meta optimization of an adaptive neuro-fuzzy inference system with grey wolf optimizer and biogeography-based optimization algorithms for spatial prediction of landslide susceptibility. Catena 2019, 175, 430–445. [Google Scholar] [CrossRef]
- Bach, F. Breaking the Curse of Dimensionality with Convex Neural Networks. J. Mach. Learn. Res. 2017, 18, 629–681. [Google Scholar]
- Verleysen, M.; Francois, D.; Simon, G.; Wertz, V. On the effects of dimensionality on data analysis with neural networks. In International Work-Conference on Artificial Neural Networks; Springer: Berlin/Heidelberg, Germany, 2003; pp. 105–112. [Google Scholar] [CrossRef]
- Goswami, S.; Chakraborty, S.; Ghosh, S.; Chakrabarti, A.; Chakraborty, B. A review on application of data mining techniques to combat natural disasters. Ain Shams Eng. J. 2015, 9, 365–378. [Google Scholar] [CrossRef] [Green Version]
- Mezaal, M.R.; Pradhan, B.; Zulhaidi, H.; Shafri, M. Data mining-aided automatic landslide detection using airborne laser scanning data in densely forested tropical areas. Korean J. Remote Sens. 2015, 34, 45–74. [Google Scholar]
- Sava, E.; Clemente-Harding, L.; Cervone, G. Supervised classification of civil air patrol (CAP). Nat. Hazards 2017, 86, 535–556. [Google Scholar] [CrossRef]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. Convolutional Neural Networks for Large-Scale Remote-Sensing Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 645–657. [Google Scholar] [CrossRef] [Green Version]
- Mou, L.; Ghamisi, P.; Zhu, X.X. Deep recurrent neural networks for hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3639–3655. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Wang, H.; Xu, F.; Jin, Y.Q. Complex-Valued Convolutional Neural Network and Its Application in Polarimetric SAR Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 7177–7188. [Google Scholar] [CrossRef]
- Long, Y.; Gong, Y.; Xiao, Z.; Liu, Q. Accurate Object Localization in Remote Sensing Images Based on Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2486–2498. [Google Scholar] [CrossRef]
- Amit, S.N.K.B.; Shiraishi, S.; Inoshita, T.; Aoki, Y. Analysis of satellite images for disaster detection. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; Volume 2016, pp. 5189–5192. [Google Scholar] [CrossRef]
- Fujita, A.; Sakurada, K.; Imaizumi, T. Damage Detection from Aerial Images via Convolutional Neural Networks. In Proceedings of the 2017 International Electronics Symposium on Knowledge Creation and Intelligent Computing (IES-KCIC), Nagoya, Japan, 8–12 May 2017; pp. 2–5. [Google Scholar]
- Amit, S.N.K.B.; Aoki, Y. Disaster detection from aerial imagery with convolutional neural network. In Proceedings of the 2017 International Electronics Symposium on Knowledge Creation and Intelligent Computing (IES-KCIC), Surabaya, Indonesia, 26–27 September 2017; pp. 239–245. [Google Scholar] [CrossRef]
- Rauter, M.; Winkler, D. Predicting Natural Hazards with Neuronal Networks. arXiv 2018, arXiv:1802.07257. [Google Scholar]
- Lipton, Z.C.; Berkowitz, J.; Elkan, C. A Critical Review of Recurrent Neural Networks for Sequence Learning. arXiv 2015, arXiv:1506.00019. [Google Scholar] [CrossRef]
- Zaremba, W.; Sutskever, I.; Vinyals, O. Recurrent Neural Network Regularization. arXiv 2014, arXiv:1409.2329. [Google Scholar]
- Guzzetti, F.; Mondini, A.C.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Chang, K.T. Landslide inventory maps: New tools for an old problem. Earth-Sci. Rev. 2012, 112, 42–66. [Google Scholar] [CrossRef] [Green Version]
- Pawley, S.; Schultz, R.; Playter, T.; Corlett, H.; Shipman, T.; Lyster, S.; Hauck, T. The Geological Susceptibility of Induced Earthquakes in the Duvernay Play. Geophys. Res. Lett. 2018, 45, 1786–1793. [Google Scholar] [CrossRef]
- Calvet, L.; Lopeman, M.; De Armas, J.; Franco, G.; Juan, A.A. Statistical and machine learning approaches for the minimization of trigger errors in parametric earthquake catastrophe bonds. SORT 2017, 41, 373–391. [Google Scholar] [CrossRef]
- Calil, J.; Reguero, B.G.; Zamora, A.R.; Losada, I.J.; Méndez, F.J. Comparative Coastal Risk Index (CCRI): A multidisciplinary risk index for Latin America and the Caribbean. PLoS ONE 2017, 12, e0187011. [Google Scholar] [CrossRef] [Green Version]
- Shihabudheen, K.V.; Peethambaran, B. Landslide displacement prediction technique using improved neuro-fuzzy system. Arab. J. Geosci. 2017, 10, 502. [Google Scholar] [CrossRef]
- Termeh, S.V.R.; Kornejady, A.; Pourghasemi, H.R.; Keesstra, S. Flood susceptibility mapping using novel ensembles of adaptive neuro fuzzy inference system and metaheuristic algorithms. Sci. Total Environ. 2018, 615, 438–451. [Google Scholar] [CrossRef]
- Passarella, M.; Goldstein, E.B.; De Muro, S.; Coco, G. The use of genetic programming to develop a predictor of swash excursion on sandy beaches. Nat. Hazards Earth Syst. Sci. 2018, 18, 599–611. [Google Scholar] [CrossRef] [Green Version]
- Stockdon, H.F.; Holman, R.A.; Howd, P.A.; Sallenger, A.H. Empirical parameterization of setup, swash, and runup. Coast. Eng. 2006, 53, 573–588. [Google Scholar] [CrossRef]
- Bates, B.C.; Dowdy, A.J.; Chandler, R.E. Lightning prediction for Australia using multivariate analyses of large-scale atmospheric variables. J. Appl. Meteorol. Climatol. 2018, 57, 525–534. [Google Scholar] [CrossRef]
- Schindler, D.; Jung, C.; Buchholz, A. Using highly resolved maximum gust speed as predictor for forest storm damage caused by the high-impact winter storm Lothar in Southwest Germany. Atmos. Sci. Lett. 2016, 17, 462–469. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Lai, C.; Chen, X.; Yang, B.; Zhao, S.; Bai, X. Flood hazard risk assessment model based on random forest. J. Hydrol. 2015, 527, 1130–1141. [Google Scholar] [CrossRef]
- Sanabria, L.A.; Qin, X.; Li, J.; Cechet, R.P.; Lucas, C. Spatial interpolation of McArthur’s Forest Fire Danger Index across Australia: Observational study. Environ. Model. Softw. 2013, 50, 37–50. [Google Scholar] [CrossRef]
- Zhu, J.; Pierskalla, W.P. Applying a weighted random forests method to extract karst sinkholes from LiDAR data. J. Hydrol. 2016, 533, 343–352. [Google Scholar] [CrossRef]
- Tehrany, M.S.; Pradhan, B.; Mansor, S.; Ahmad, N. Flood susceptibility assessment using GIS-based support vector machine model with different kernel types. Catena 2015, 125, 91–101. [Google Scholar] [CrossRef]
- Pozdnoukhov, A.; Foresti, L.; Kanevski, M. Data-driven topo-climatic mapping with machine learning methods. Nat. Hazards 2009, 50, 497–518. [Google Scholar] [CrossRef] [Green Version]
- Harmouzi, H.; Nefeslioglu, H.A.; Rouai, M.; Sezer, E.A.; Dekayir, A.; Gokceoglu, C. Landslide susceptibility mapping of the Mediterranean coastal zone of Morocco between Oued Laou and El Jebha using artificial neural networks (ANN). Arab. J. Geosci. 2019, 12, 696. [Google Scholar] [CrossRef]
- Sevgen, E.; Kocaman, S.; Nefeslioglu, H.A.; Gokceoglu, C. A novel performance assessment approach using photogrammetric techniques for landslide susceptibility mapping with logistic regression, ANN and random forest. Sensors 2019, 19, 3940. [Google Scholar] [CrossRef] [Green Version]
- Tarhan, F. Dogu Karadeniz heyelanlarina genel bir bakis. 1. Ulusal Heyelan Sempozyumu Bildiriler Kitabi. 1991. Available online: https://heysemp2018.afad.gov.tr/tr/25678/1-Ulusal-Heyelan-Sempozyumu-Bildiriler-Kitabi-ve-Sonuc-Bildirgesi (accessed on 11 December 2019).
- Güven, İ. 1/100000 Ölçekli Açınsama Nitelikli Türkiye Jeoloji Haritaları, Trabzon-C28 ve D28 paftaları; Jeoloji Etütleri Dairesi, MTA Genel Müdürlüğü: Ankara, Turkey, 1998. [Google Scholar]
- Yilmaz, B.; Guc, A.; Gulibrahimoglu, I.; Yazici, E.; Konak, O.; Yaprak, S.; Kose, Z. Rize Ilinin Cevre Jeolojisi. MTA Raporu 1998, 10068, 234. [Google Scholar]
- Nefeslioglu, H.A.; Gokceoglu, C.; Sonmez, H.; Gorum, T. Medium-scale hazard mapping for shallow landslide initiation: The Buyukkoy catchment area (Cayeli, Rize, Turkey). Landslides 2011, 8, 459–483. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Cruden, D.M. A simple definition of a landslide. Bull. Int. Assoc. Eng. Geol. - Bull. De L’Association Int. De Géologie De L’Ingénieur 1991, 43, 27–29. [Google Scholar] [CrossRef]
- Soeters, R.; van Westen, C. Slope instability recognition, analysis, and zonation. In Landslides: Investigation and Mitigation; Transportation Research Board National Research Council: Washington, DC, USA, 1996; Volume 247, pp. 129–177. [Google Scholar]
- Fell, R.; Corominas, J.; Bonnard, C.; Cascini, L.; Leroi, E.; Savage, W.Z. Guidelines for landslide susceptibility, hazard and risk zoning for land-use planning. Eng. Geol. 2008, 102, 99–111. [Google Scholar] [CrossRef] [Green Version]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning Long-Term Dependencies with Gradient Descent is Difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Nefeslioglu, H.A.; Gokceoglu, C. Probabilistic risk assessment in medium scale for rainfall-induced earthflows: Catakli catchment area (Cayeli, Rize, Turkey). Math. Probl. Eng. 2011, 2011, 280431. [Google Scholar] [CrossRef] [Green Version]
- Can, T.; Nefeslioglu, H.A.; Gokceoglu, C.; Sonmez, H.; Duman, T.Y. Susceptibility assessments of shallow earthflows triggered by heavy rainfall at three catchments by logistic regression analyses. Geomorphology 2005, 72, 250–271. [Google Scholar] [CrossRef]




| Parameter Group | Parameter Name and Abbreviation | Min. | Max | Mean | Std.Dev. | Variance |
|---|---|---|---|---|---|---|
| Topographic Parameters | Topographic altitude (m) | 49.460 | 540.314 | 246.325 | 102.059 | 10,415.977 |
| Slope gradient (rad) | 0.146 | 0.875 | 0.514 | 0.131 | 0.017 | |
| Annual solar radiation (ASR) (In[Rad]) | 0.430 | 1.040 | 0.827 | 0.161 | 0.026 | |
| Plan slope curvature ( m) | −0.088 | 0.048 | 0.000 | 0.016 | 0.000 | |
| Profile slope curvature ( m) | −0.057 | 0.083 | 0.002 | 0.019 | 0.000 | |
| Convergence index | −27.324 | 27.794 | −0.993 | 8.749 | 76.540 | |
| Hydro-Topographic Parameters | Topographic wetness index (TWI) | 3.168 | 10.271 | 5.008 | 0.985 | 0.971 |
| Stream power index (SPI) | 2.047 | 678.376 | 67.985 | 84.738 | 7180.525 | |
| Sediment transport capacity index (LS) | 2.460 | 53.807 | 22.398 | 8.967 | 80.405 | |
| Hydrologic Parameters | Distance to drainage (m) | 1.104 | 372.853 | 103.324 | 69.048 | 4767.674 |
| Drainage density (km) | 0.150 | 13.230 | 4.874 | 2.914 | 8.491 | |
| Anthropogenic Parameters | Distance to road (m) | 1.103 | 233.653 | 49.678 | 37.466 | 1403.710 |
| Road density (km) | 1.110 | 10.220 | 5.745 | 1.814 | 3.290 | |
| Building density (km) | 10.760 | 160.050 | 87.796 | 34.381 | 1182.057 | |
| Vegetation | Normalized Difference Vegetation Index (NDVI) | 0.074 | 0.710 | 0.556 | 0.088 | 0.008 |
| Discrete Parameters | # of Grid Cells | # of Grid Cells with Shallow Landslides |
|---|---|---|
| Alluvium (alv) | 24,833 | 0 |
| Andesite-basalt lava and pyroclastics (ablp) | 81,565 | 37 |
| Kackar granitoids (g) | 135,320 | 63 |
| Basalt-andesite lava and pyroclastics (balp) | 434,879 | 151 |
| Rhyodacite, dacite lava and pyroclastics (rdlp) | 127,346 | 0 |
| Basalt-andesite lava and pyroclastics with sandstone, clayey limestone and siltstone alternations (balp-scs) | 71,873 | 0 |
| Parameter Set ID | Containing Parameters | ||
|---|---|---|---|
| Topographic parameters | |||
| AND | TWI | ||
| AND | SPI | ||
| AND | LS | ||
| AND | Distance to drainage | ||
| AND | Drainage density | ||
| AND | Distance to road | ||
| AND | Road density | ||
| AND | Building density | ||
| AND | NDVI | ||
| AND | Lithology | ||
| RNN | ANN | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 64 neurons | 128 neurons | 256 neurons | |||||||||||
| 100 k | 300 k | 500 k | 1 m | 100 k | 300 k | 500 k | 1 m | 100 k | 300 k | 500 k | 1 m | ||
| 0.583 | 0.597 | 0.625 | 0.582 | 0.549 | 0.522 | 0.610 | 0.636 | 0.528 | 0.562 | 0.533 | 0.628 | 0.799 | |
| 0.677 | 0.675 | 0.693 | 0.670 | 0.667 | 0.670 | 0.677 | 0.684 | 0.621 | 0.649 | 0.670 | 0.685 | 0.819 | |
| 0.674 | 0.690 | 0.690 | 0.698 | 0.665 | 0.680 | 0.698 | 0.699 | 0.637 | 0.674 | 0.684 | 0.694 | 0.838 | |
| 0.690 | 0.686 | 0.691 | 0.705 | 0.684 | 0.686 | 0.708 | 0.691 | 0.676 | 0.698 | 0.701 | 0.731 | 0.849 | |
| 0.623 | 0.648 | 0.675 | 0.668 | 0.665 | 0.694 | 0.707 | 0.705 | 0.663 | 0.713 | 0.708 | 0.720 | 0.839 | |
| 0.644 | 0.640 | 0.690 | 0.723 | 0.646 | 0.674 | 0.705 | 0.708 | 0.667 | 0.686 | 0.706 | 0.746 | 0.853 | |
| 0.746 | 0.778 | 0.738 | 0.801 | 0.749 | 0.747 | 0.784 | 0.824 | 0.754 | 0.788 | 0.822 | 0.827 | 0.850 | |
| 0.763 | 0.787 | 0.789 | 0.808 | 0.715 | 0.783 | 0.800 | 0.817 | 0.680 | 0.785 | 0.805 | 0.841 | 0.873 | |
| 0.771 | 0.791 | 0.805 | 0.828 | 0.787 | 0.790 | 0.812 | 0.875 | 0.711 | 0.830 | 0.813 | 0.865 | 0.870 | |
| 0.783 | 0.800 | 0.808 | 0.805 | 0.779 | 0.797 | 0.820 | 0.831 | 0.792 | 0.810 | 0.830 | 0.851 | 0.877 | |
| 0.745 | 0.785 | 0.794 | 0.806 | 0.759 | 0.776 | 0.792 | 0.828 | 0.773 | 0.787 | 0.794 | 0.781 | 0.881 | |
| RNN | ANN | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 64 neurons | 128 neurons | 256 neurons | |||||||||||
| 100 k | 300 k | 500 k | 1 m | 100 k | 300 k | 500 k | 1 m | 100 k | 300 k | 500 k | 1 m | ||
| 0.591 | 0.548 | 0.595 | 0.616 | 0.522 | 0.532 | 0.551 | 0.605 | 0.506 | 0.566 | 0.588 | 0.582 | 0.777 | |
| 0.659 | 0.668 | 0.674 | 0.673 | 0.663 | 0.673 | 0.669 | 0.674 | 0.624 | 0.647 | 0.674 | 0.675 | 0.791 | |
| 0.664 | 0.690 | 0.697 | 0.701 | 0.660 | 0.694 | 0.692 | 0.704 | 0.656 | 0.676 | 0.700 | 0.709 | 0.814 | |
| 0.694 | 0.708 | 0.712 | 0.709 | 0.674 | 0.708 | 0.706 | 0.712 | 0.690 | 0.705 | 0.703 | 0.713 | 0.817 | |
| 0.653 | 0.679 | 0.683 | 0.696 | 0.650 | 0.646 | 0.695 | 0.670 | 0.609 | 0.717 | 0.702 | 0.681 | 0.818 | |
| 0.672 | 0.679 | 0.700 | 0.721 | 0.666 | 0.702 | 0.725 | 0.736 | 0.677 | 0.689 | 0.715 | 0.742 | 0.828 | |
| 0.694 | 0.729 | 0.749 | 0.797 | 0.742 | 0.759 | 0.776 | 0.792 | 0.737 | 0.767 | 0.771 | 0.803 | 0.825 | |
| 0.748 | 0.758 | 0.775 | 0.801 | 0.745 | 0.759 | 0.788 | 0.798 | 0.697 | 0.762 | 0.763 | 0.804 | 0.843 | |
| 0.742 | 0.792 | 0.793 | 0.834 | 0.739 | 0.811 | 0.799 | 0.838 | 0.761 | 0.783 | 0.833 | 0.835 | 0.857 | |
| 0.795 | 0.800 | 0.811 | 0.833 | 0.799 | 0.807 | 0.819 | 0.829 | 0.785 | 0.815 | 0.802 | 0.846 | 0.850 | |
| 0.766 | 0.772 | 0.776 | 0.783 | 0.769 | 0.790 | 0.792 | 0.814 | 0.773 | 0.792 | 0.800 | 0.815 | 0.855 | |
| Model | Neuron | Iter. | AUC | Thres. | TP | TN | FP | FN | P | R | F | A |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RNN | 64 | 100 k | 0.786 | 0.5 | 236 | 413,201 | 462,364 | 15 | 0.0005 | 0.940 | 0.001 | 0.472 |
| RNN | 64 | 300 k | 0.803 | 0.5 | 228 | 477,979 | 397,586 | 23 | 0.0006 | 0.908 | 0.001 | 0.546 |
| RNN | 64 | 500 k | 0.809 | 0.5 | 219 | 521,866 | 353,699 | 32 | 0.0006 | 0.873 | 0.001 | 0.596 |
| RNN | 64 | 1 m | 0.827 | 0.5 | 219 | 562,888 | 312,677 | 32 | 0.0007 | 0.873 | 0.001 | 0.643 |
| RNN | 128 | 100 k | 0.791 | 0.5 | 249 | 335,499 | 540,066 | 2 | 0.0005 | 0.992 | 0.001 | 0.383 |
| RNN | 128 | 300 k | 0.789 | 0.5 | 247 | 345,026 | 530,539 | 4 | 0.0006 | 0.853 | 0.001 | 0.607 |
| RNN | 128 | 500 k | 0.811 | 0.5 | 239 | 427,786 | 447,779 | 12 | 0.0005 | 0.952 | 0.001 | 0.489 |
| RNN | 128 | 1 m | 0.836 | 0.5 | 236 | 519,806 | 355,759 | 15 | 0.0007 | 0.940 | 0.001 | 0.594 |
| RNN | 256 | 100 k | 0.790 | 0.5 | 251 | 308,608 | 566,957 | 0 | 0.0004 | 1.000 | 0.001 | 0.353 |
| RNN | 256 | 300 k | 0.798 | 0.5 | 248 | 332,697 | 542,868 | 3 | 0.0005 | 0.988 | 0.001 | 0.380 |
| RNN | 256 | 500 k | 0.810 | 0.5 | 247 | 350,170 | 525,395 | 4 | 0.0005 | 0.984 | 0.001 | 0.400 |
| RNN | 256 | 1 m | 0.825 | 0.5 | 246 | 380,059 | 495,506 | 5 | 0.0005 | 0.980 | 0.001 | 0.434 |
| RNN | 256 | 2.5 m | 0.878 | 0.5 | 241 | 592,554 | 283,011 | 10 | 0.0009 | 0.960 | 0.002 | 0.677 |
| RNN | 256 | 5 m | 0.914 | 0.5 | 230 | 708,251 | 167,314 | 21 | 0.0014 | 0.916 | 0.003 | 0.809 |
| ANN | 5331 | 0.832 | 0.5 | 118 | 787,234 | 88,331 | 133 | 0.0013 | 0.470 | 0.003 | 0.899 | |
| RNN | 64 | 100 k | 0.786 | 0.6 | 226 | 471,537 | 404,028 | 25 | 0.0006 | 0.900 | 0.001 | 0.539 |
| RNN | 64 | 300 k | 0.803 | 0.6 | 206 | 571,116 | 304,449 | 45 | 0.0007 | 0.821 | 0.001 | 0.652 |
| RNN | 64 | 500 k | 0.809 | 0.6 | 189 | 623,118 | 252,447 | 62 | 0.0008 | 0.753 | 0.001 | 0.712 |
| RNN | 64 | 1 m | 0.827 | 0.6 | 182 | 657,667 | 217,898 | 69 | 0.0008 | 0.725 | 0.002 | 0.751 |
| RNN | 128 | 100 k | 0.791 | 0.6 | 243 | 362,430 | 513,135 | 8 | 0.0005 | 0.968 | 0.001 | 0.414 |
| RNN | 128 | 300 k | 0.789 | 0.6 | 243 | 375,956 | 499,609 | 8 | 0.0005 | 0.968 | 0.001 | 0.430 |
| RNN | 128 | 500 k | 0.811 | 0.6 | 231 | 482,090 | 393,475 | 20 | 0.0006 | 0.920 | 0.001 | 0.551 |
| RNN | 128 | 1 m | 0.836 | 0.6 | 215 | 579,589 | 295,976 | 36 | 0.0007 | 0.857 | 0.001 | 0.662 |
| RNN | 256 | 100 k | 0.790 | 0.6 | 249 | 324,497 | 551,068 | 2 | 0.0005 | 0.992 | 0.001 | 0.371 |
| RNN | 256 | 300 k | 0.798 | 0.6 | 246 | 355,351 | 520,214 | 5 | 0.0005 | 0.980 | 0.001 | 0.406 |
| RNN | 256 | 500 k | 0.810 | 0.6 | 245 | 384,607 | 490,958 | 6 | 0.0005 | 0.976 | 0.001 | 0.439 |
| RNN | 256 | 1 m | 0.825 | 0.6 | 245 | 407,583 | 467,982 | 6 | 0.0005 | 0.976 | 0.001 | 0.466 |
| RNN | 256 | 2.5 m | 0.878 | 0.6 | 234 | 613,258 | 262,307 | 17 | 0.0009 | 0.932 | 0.002 | 0.700 |
| RNN | 256 | 5 m | 0.914 | 0.6 | 230 | 715,214 | 160,351 | 21 | 0.0014 | 0.916 | 0.003 | 0.817 |
| ANN | 5331 | 0.832 | 0.6 | 53 | 842,909 | 32,656 | 198 | 0.0016 | 0.211 | 0.003 | 0.962 | |
| RNN | 64 | 100 k | 0.786 | 0.7 | 200 | 564,873 | 310,692 | 51 | 0.0006 | 0.797 | 0.001 | 0.645 |
| RNN | 64 | 300 k | 0.803 | 0.7 | 139 | 723,638 | 151,927 | 112 | 0.0009 | 0.554 | 0.002 | 0.826 |
| RNN | 64 | 500 k | 0.809 | 0.7 | 113 | 763,143 | 112,422 | 138 | 0.0010 | 0.450 | 0.002 | 0.871 |
| RNN | 64 | 1 m | 0.827 | 0.7 | 103 | 789,526 | 86,039 | 148 | 0.0012 | 0.410 | 0.002 | 0.902 |
| RNN | 128 | 100 k | 0.791 | 0.7 | 236 | 408,812 | 466,753 | 15 | 0.0005 | 0.940 | 0.001 | 0.467 |
| RNN | 128 | 300 k | 0.789 | 0.7 | 237 | 429,113 | 446,452 | 14 | 0.0005 | 0.944 | 0.001 | 0.490 |
| RNN | 128 | 500 k | 0.811 | 0.7 | 211 | 561,383 | 314,182 | 40 | 0.0007 | 0.841 | 0.001 | 0.641 |
| RNN | 128 | 1 m | 0.836 | 0.7 | 188 | 648,074 | 227,491 | 63 | 0.0008 | 0.749 | 0.002 | 0.740 |
| RNN | 256 | 100 k | 0.790 | 0.7 | 244 | 349,402 | 526,163 | 7 | 0.0005 | 0.972 | 0.001 | 0.399 |
| RNN | 256 | 300 k | 0.798 | 0.7 | 241 | 394,126 | 481,439 | 10 | 0.0005 | 0.960 | 0.001 | 0.450 |
| RNN | 256 | 500 k | 0.810 | 0.7 | 236 | 441,312 | 434,253 | 15 | 0.0005 | 0.940 | 0.001 | 0.504 |
| RNN | 256 | 1 m | 0.825 | 0.7 | 237 | 445,759 | 429,806 | 14 | 0.0006 | 0.944 | 0.001 | 0.509 |
| RNN | 256 | 2.5 m | 0.878 | 0.7 | 228 | 635,234 | 240,331 | 23 | 0.0010 | 0.908 | 0.002 | 0.726 |
| RNN | 256 | 5 m | 0.914 | 0.7 | 230 | 722,755 | 152,810 | 21 | 0.0015 | 0.916 | 0.003 | 0.826 |
| ANN | 5331 | 0.832 | 0.7 | 18 | 867,046 | 8519 | 233 | 0.0021 | 0.072 | 0.004 | 0.990 | |
| RNN | 64 | 100 k | 0.786 | 0.8 | 94 | 765,849 | 109,716 | 157 | 0.0009 | 0.375 | 0.002 | 0.875 |
| RNN | 64 | 300 k | 0.803 | 0.8 | 0 | 875,565 | 0 | 251 | NA | NA | NA | NA |
| RNN | 64 | 500 k | 0.809 | 0.8 | 11 | 870,597 | 4968 | 240 | 0.0022 | 0.044 | 0.004 | 0.994 |
| RNN | 64 | 1 m | 0.827 | 0.8 | 8 | 872,902 | 2663 | 243 | 0.0030 | 0.032 | 0.005 | 0.997 |
| RNN | 128 | 100 k | 0.791 | 0.8 | 216 | 510,779 | 364,786 | 35 | 0.0006 | 0.861 | 0.001 | 0.583 |
| RNN | 128 | 300 k | 0.789 | 0.8 | 214 | 531,536 | 344,029 | 37 | 0.0006 | 0.853 | 0.001 | 0.607 |
| RNN | 128 | 500 k | 0.811 | 0.8 | 143 | 718,558 | 157,007 | 108 | 0.0009 | 0.570 | 0.002 | 0.821 |
| RNN | 128 | 1 m | 0.836 | 0.8 | 153 | 730,672 | 144,893 | 98 | 0.0011 | 0.610 | 0.002 | 0.834 |
| RNN | 256 | 100 k | 0.790 | 0.8 | 239 | 402,748 | 472,817 | 12 | 0.0005 | 0.952 | 0.001 | 0.460 |
| RNN | 256 | 300 k | 0.798 | 0.8 | 228 | 485,395 | 390,170 | 23 | 0.0006 | 0.908 | 0.001 | 0.554 |
| RNN | 256 | 500 k | 0.810 | 0.8 | 216 | 551,288 | 324,277 | 35 | 0.0007 | 0.861 | 0.001 | 0.630 |
| RNN | 256 | 1 m | 0.825 | 0.8 | 222 | 516,727 | 358,838 | 29 | 0.0006 | 0.884 | 0.001 | 0.590 |
| RNN | 256 | 2.5 m | 0.878 | 0.8 | 222 | 661,290 | 214,275 | 29 | 0.0010 | 0.884 | 0.002 | 0.755 |
| RNN | 256 | 5 m | 0.914 | 0.8 | 227 | 731,787 | 143,778 | 24 | 0.0016 | 0.904 | 0.003 | 0.836 |
| ANN | 5331 | 0.832 | 0.8 | 4 | 873,618 | 1947 | 247 | 0.0021 | 0.016 | 0.004 | 0.997 | |
| RNN | 64 | 100 k | 0.786 | 0.9 | 0 | 875,565 | 0 | 251 | NA | NA | NA | NA |
| RNN | 64 | 300 k | 0.803 | 0.9 | 0 | 875,565 | 0 | 251 | NA | NA | NA | NA |
| RNN | 64 | 500 k | 0.809 | 0.9 | 0 | 875,565 | 0 | 251 | NA | NA | NA | NA |
| RNN | 64 | 1 m | 0.827 | 0.9 | 0 | 875,540 | 25 | 251 | 0.0000 | 0.000 | 0.000 | 1.000 |
| RNN | 128 | 100 k | 0.791 | 0.9 | 63 | 814,051 | 61,514 | 188 | 0.0010 | 0.251 | 0.002 | 0.930 |
| RNN | 128 | 300 k | 0.789 | 0.9 | 69 | 792,831 | 82,734 | 182 | 0.0008 | 0.275 | 0.002 | 0.905 |
| RNN | 128 | 500 k | 0.811 | 0.9 | 4 | 870,381 | 5184 | 247 | 0.0008 | 0.016 | 0.001 | 0.994 |
| RNN | 128 | 1 m | 0.836 | 0.9 | 63 | 829,876 | 45,689 | 188 | 0.0014 | 0.251 | 0.003 | 0.948 |
| RNN | 256 | 100 k | 0.790 | 0.9 | 196 | 583,535 | 292,030 | 55 | 0.0007 | 0.781 | 0.001 | 0.667 |
| RNN | 256 | 300 k | 0.798 | 0.9 | 139 | 705,585 | 169,980 | 112 | 0.0008 | 0.554 | 0.002 | 0.806 |
| RNN | 256 | 500 k | 0.810 | 0.9 | 110 | 761,583 | 113,982 | 141 | 0.0010 | 0.438 | 0.002 | 0.870 |
| RNN | 256 | 1 m | 0.825 | 0.9 | 178 | 680,053 | 195,512 | 73 | 0.0009 | 0.709 | 0.002 | 0.777 |
| RNN | 256 | 2.5 m | 0.878 | 0.9 | 199 | 699,120 | 176,445 | 52 | 0.0011 | 0.793 | 0.002 | 0.798 |
| RNN | 256 | 5 m | 0.914 | 0.9 | 225 | 744,796 | 130,769 | 26 | 0.0017 | 0.896 | 0.003 | 0.851 |
| ANN | 5331 | 0.832 | 0.9 | 0 | 875,072 | 493 | 251 | 0.0000 | 0.000 | 0.000 | 0.999 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mutlu, B.; Nefeslioglu, H.A.; Sezer, E.A.; Akcayol, M.A.; Gokceoglu, C. An Experimental Research on the Use of Recurrent Neural Networks in Landslide Susceptibility Mapping. ISPRS Int. J. Geo-Inf. 2019, 8, 578. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8120578
Mutlu B, Nefeslioglu HA, Sezer EA, Akcayol MA, Gokceoglu C. An Experimental Research on the Use of Recurrent Neural Networks in Landslide Susceptibility Mapping. ISPRS International Journal of Geo-Information. 2019; 8(12):578. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8120578
Chicago/Turabian StyleMutlu, Begum, Hakan A. Nefeslioglu, Ebru A. Sezer, M. Ali Akcayol, and Candan Gokceoglu. 2019. "An Experimental Research on the Use of Recurrent Neural Networks in Landslide Susceptibility Mapping" ISPRS International Journal of Geo-Information 8, no. 12: 578. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8120578