Out of Plumb Assessment for Cylindrical-Like Minaret Structures Using Geometric Primitives Fitting



Abstract
:1. Introduction
- -
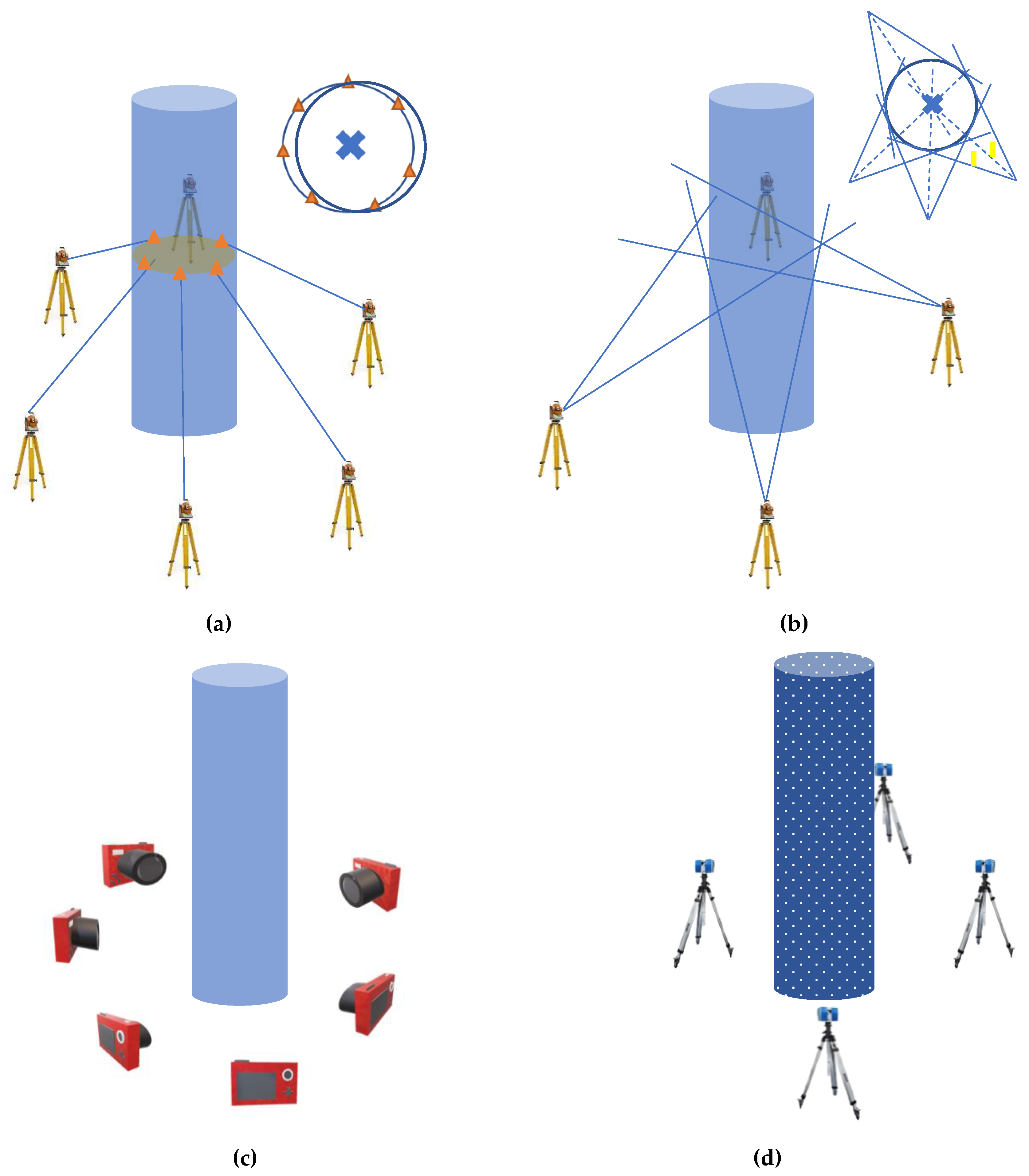
- Geodetic techniques: these techniques are the most accurate, where several control targets are placed on specific preselected locations of the study object. Total station instruments are used to fix the coordinates of the control points and baselines with millimetric accuracy in a predesigned network [2]. Frequently, GPS is also used for absolute positioning of the control network. This technique is based on measuring sparse target control points on the structure surface body (Figure 1a). The cylindrical axis is then defined at multiple heights from the best fit circles of the points. Other old techniques included using theodolite instruments, whereby angles are halved to define the cylindrical axis (Figure 1b) at multiple heights.
- -
- Laser scanning techniques TLS: these techniques are applied normally from terrestrial-based time of flight (TOF) ranging scanners or phase-based laser scanners (Figure 1d). The TLS approach [5,6,7,8,9,10] has the advantage of high positioning accuracy, while it depends on the intrinsic noise of the instrument and how good the coregistration of the multiple scanning point clouds is. Compared to image-based approaches, the TLS is higher in cost, heavier, and requires a level of proficiency.
- -
- They have lower cost compared to the geodetic and laser scanning approaches.
- They are portable and can be applied in situ without disturbing site visitors.
- The possibility to reconstruct lost heritage models using archived and crowdsourced images and videos.
2. Out of Plumb Computation Method
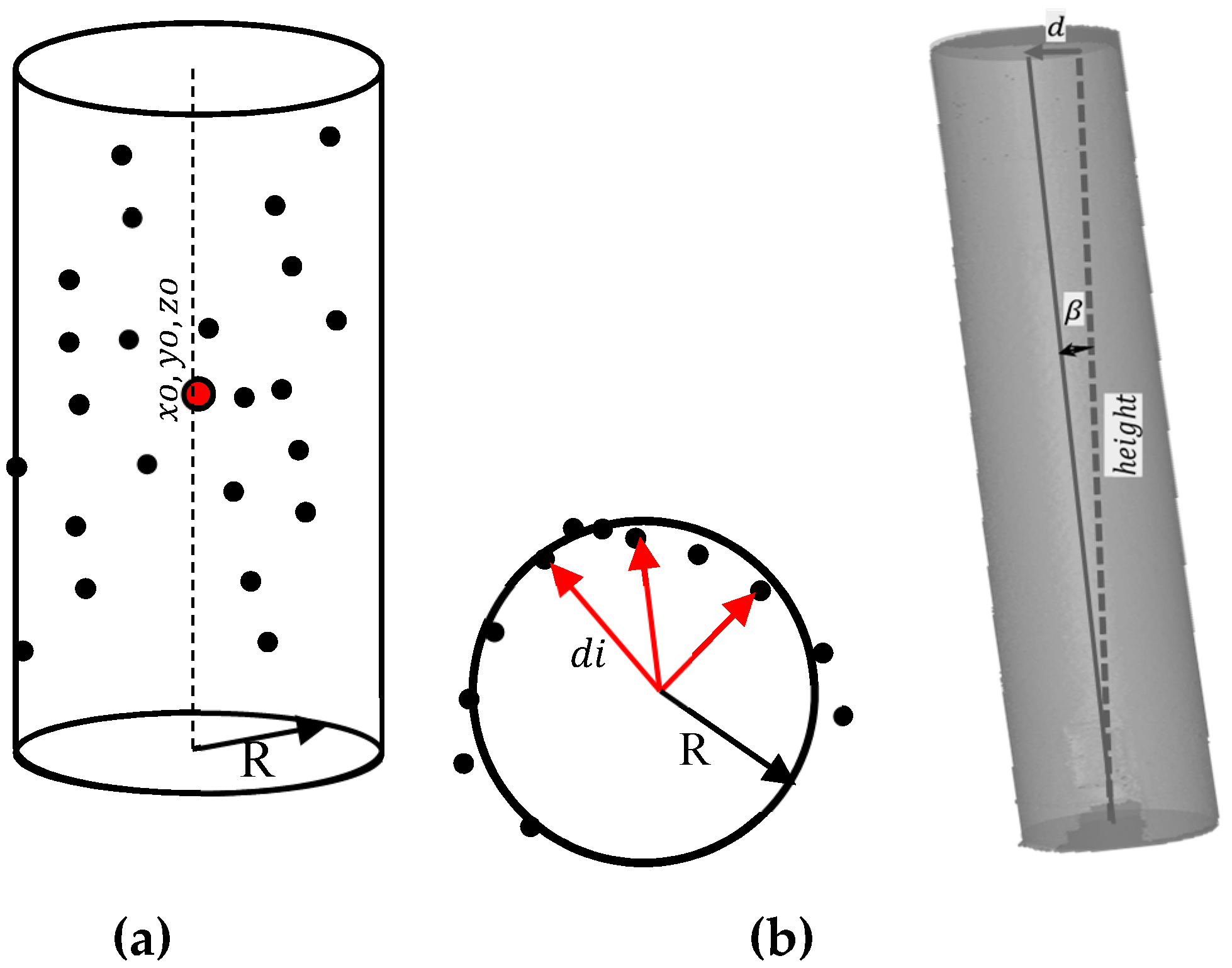
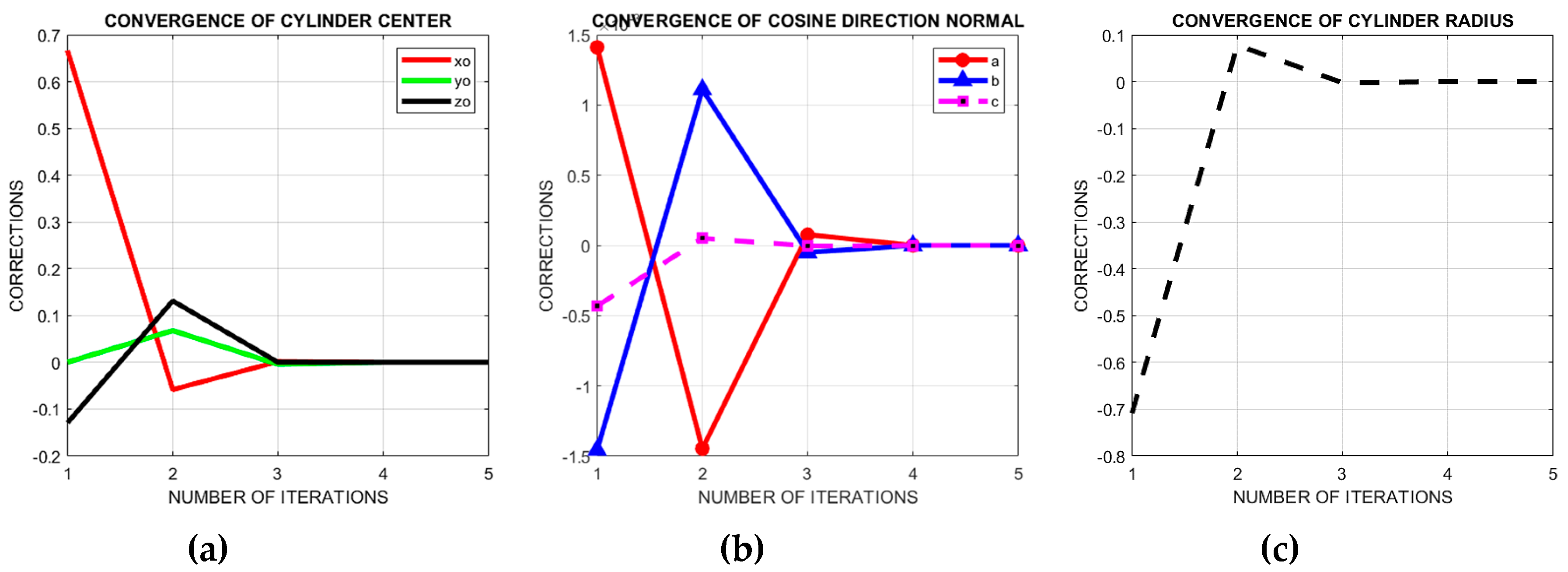
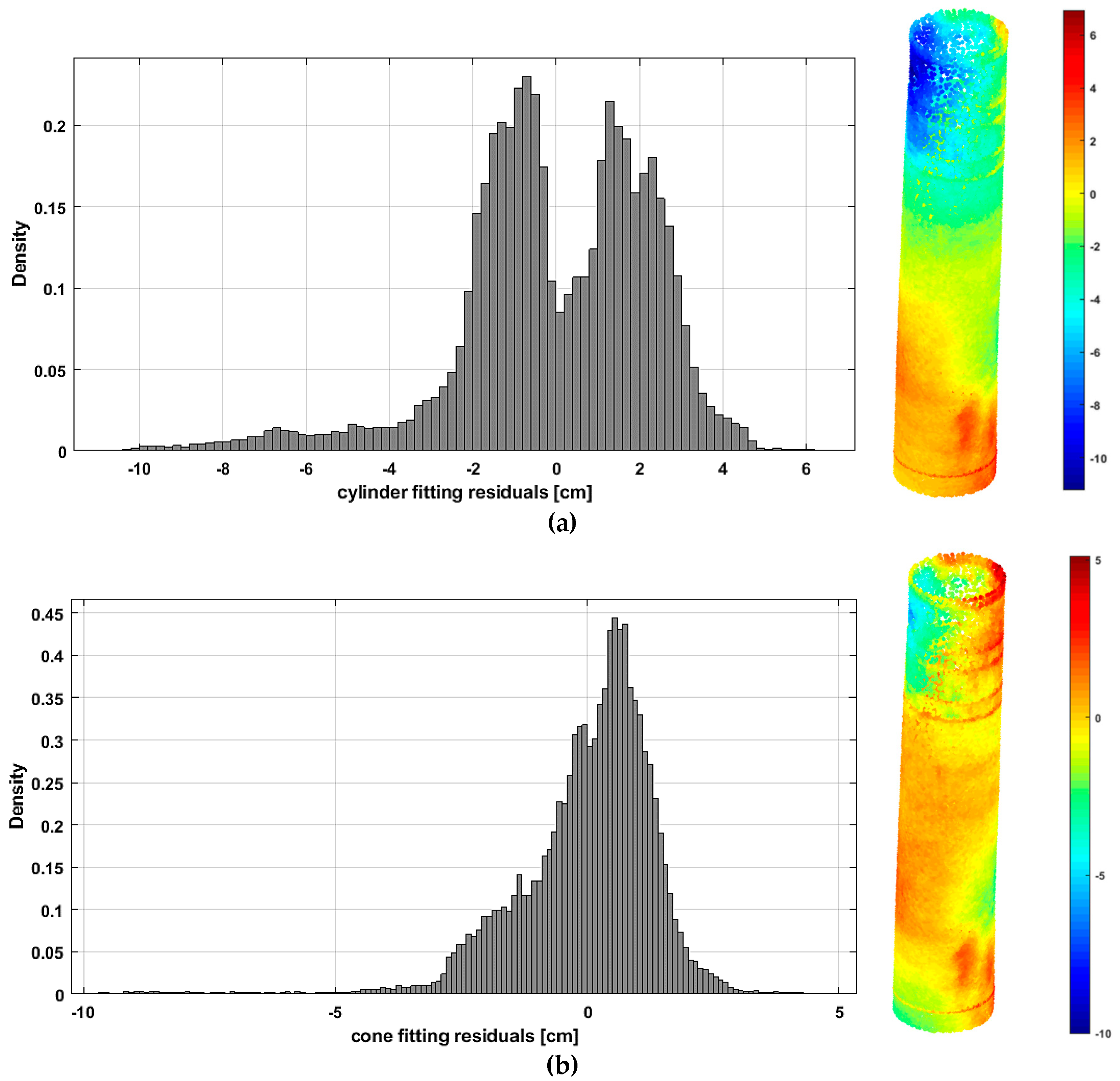
2.1. Cylinder Fitting
- Point of origin lying on the cylinder axis, defined as xo, yo, zo.
- Cosine direction normal a, b, c of the cylinder axis.
- Radius of the cylinder R.
- -
- The first derivation step is to apply the cross product between the vector derived from the coordinate differences and the cosine direction as:where × refers to cross product and ∥ ∥ refers to norm.
- Δ: vector of corrections to fitting parameters.
- V: vector of residual errors.
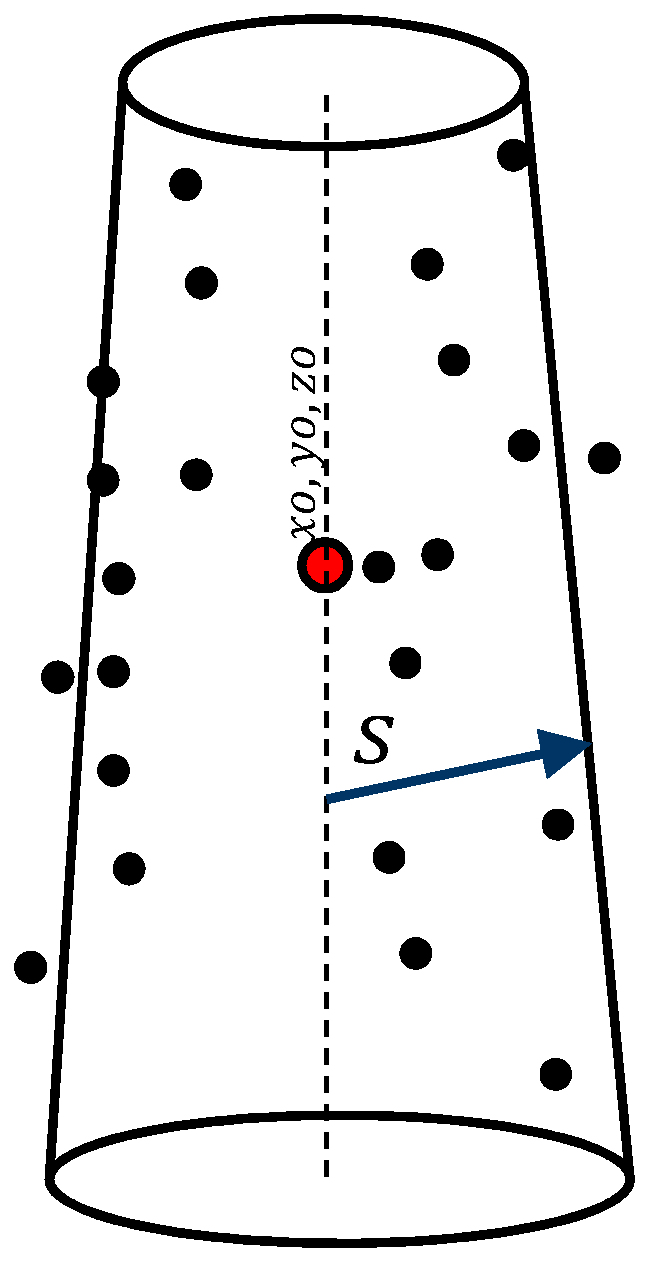
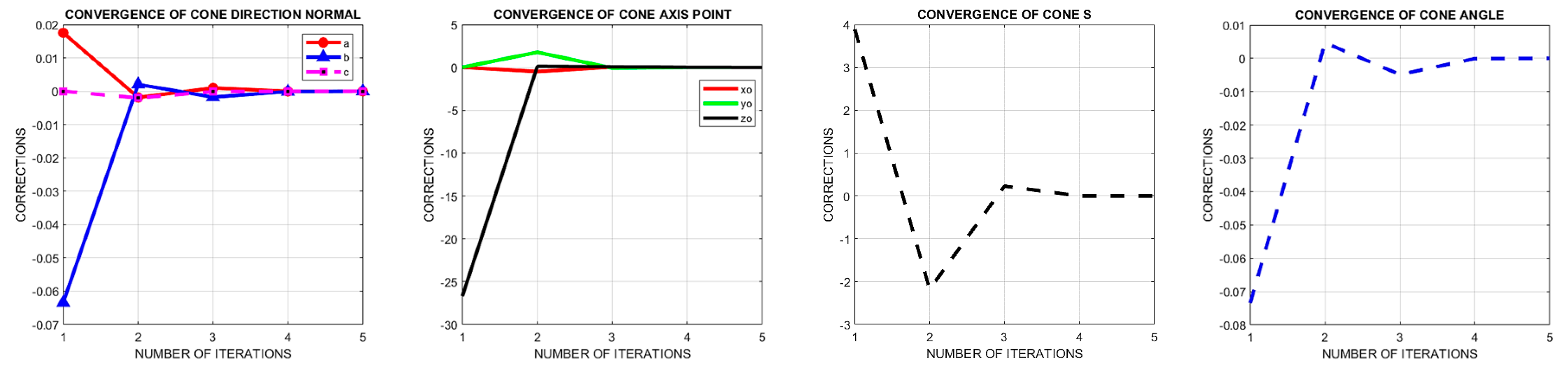
2.2. Cone Fitting
- -
- Point of origin lying on the cone axis and defined as xo, yo, zo.
- -
- Cosine direction numbers a, b, c of the cone axis (pointing to the apex).
- -
- Orthogonal distance from the point of origin to cone s.
- -
- The cone’s apex semi-angle θ.
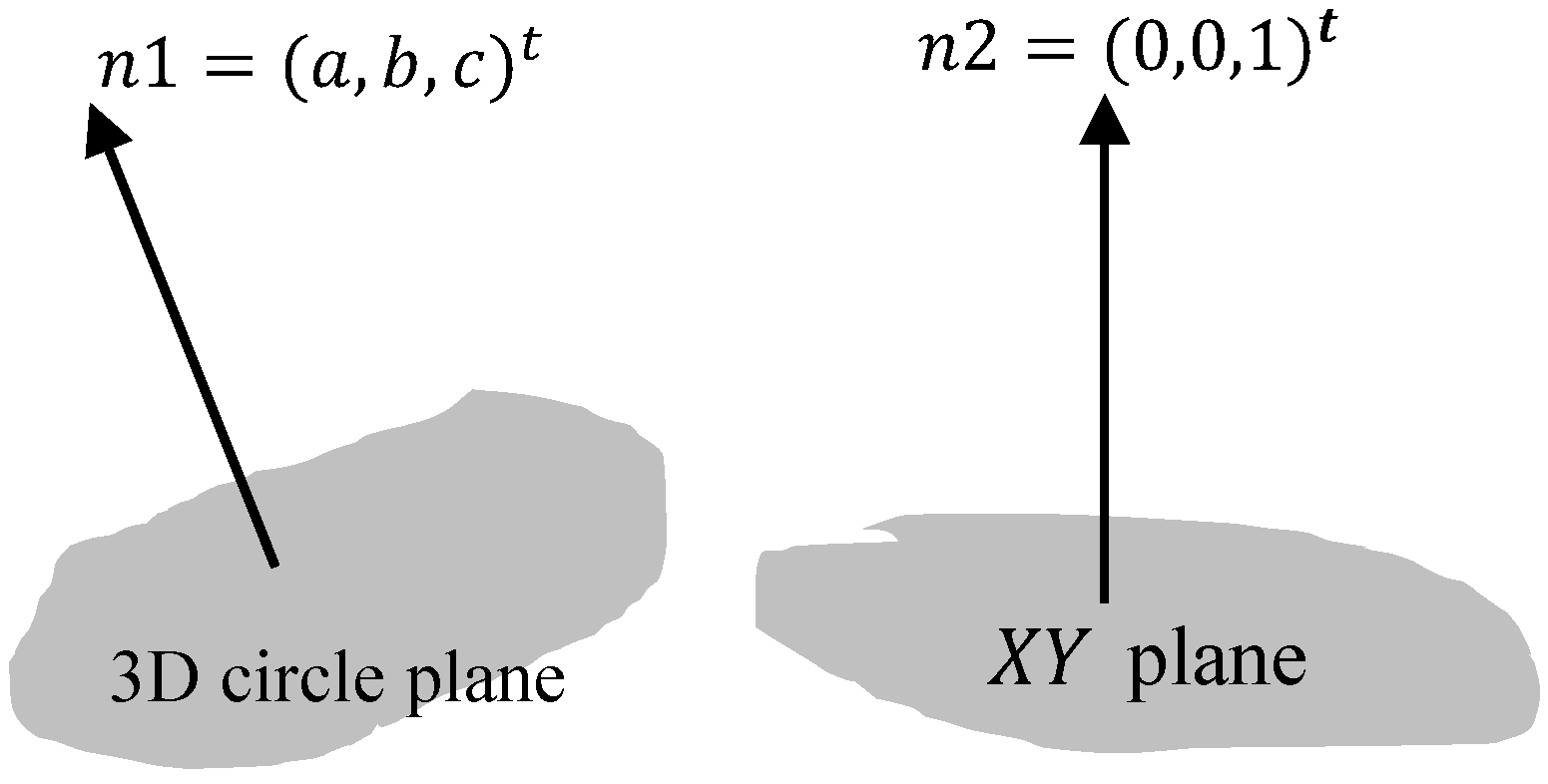
2.3. Circle Fitting in 3D space
- Compute the best fit least squares plane of the data as explained previously.
- Rotate the points such that the least squares plane is the XY plane.
- Rotate data points onto the XY plane.
- Compute the 2D circle fit in the XY plane.
- Rotate back to the original orientation in 3D space.
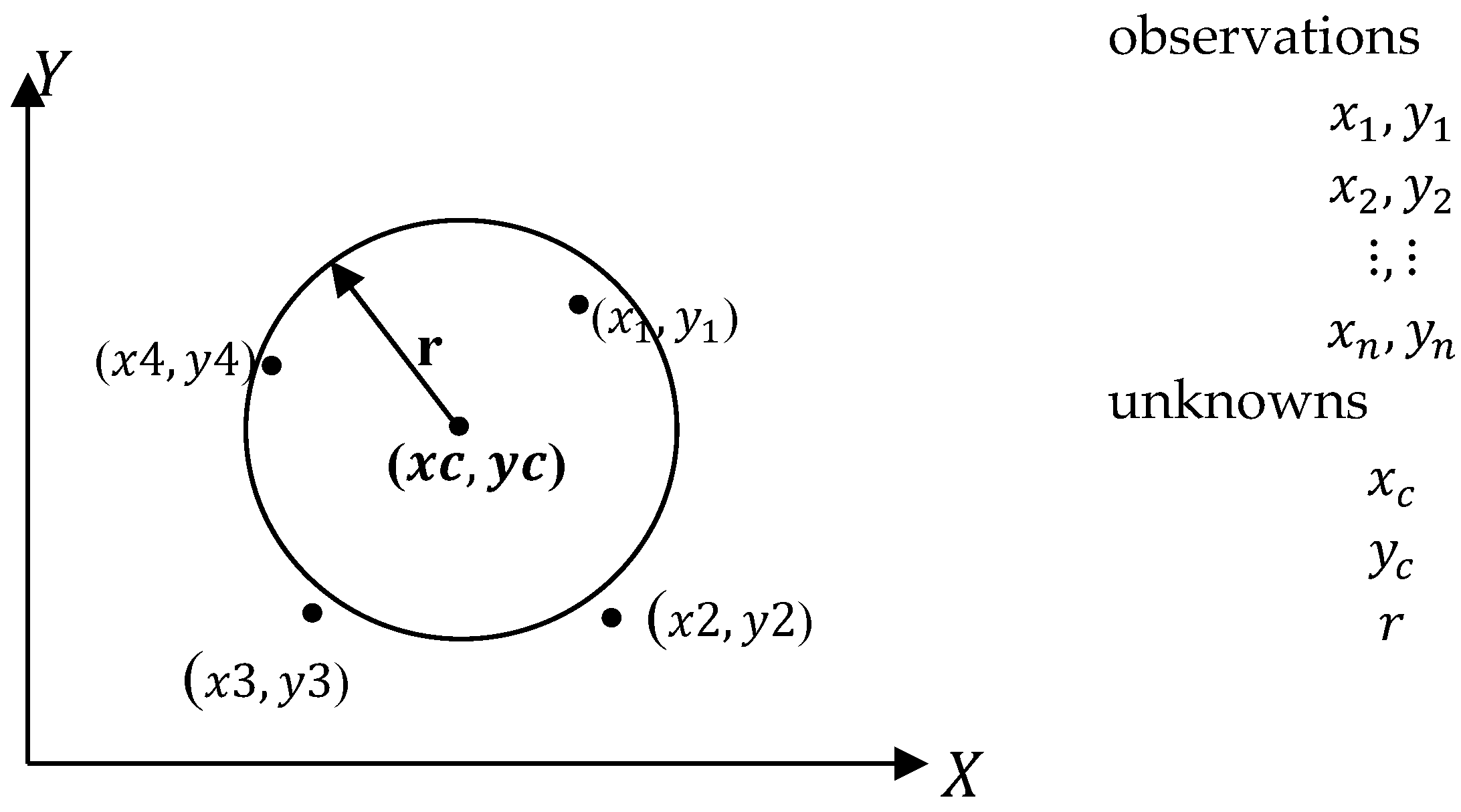
2.3.1. Fitting a 2D Circle
- Given: XY points, i = 1:n
- Required: the adjusted radius r, and circle center
2.3.2. Rodrigues Rotation Formula
- Find the axis and angle of rotation using cross product and dot product respectively. The axis of rotation k is a cross product (×) between plane normal and the normal of the new XY coordinates. Thus, and . Furthermore,
- Find the rotation matrix M using exponential map:where
- -
- Skew—symmetric matrix
- -
- , then normalized.
3. Results and discussion
3.1. First Experiment
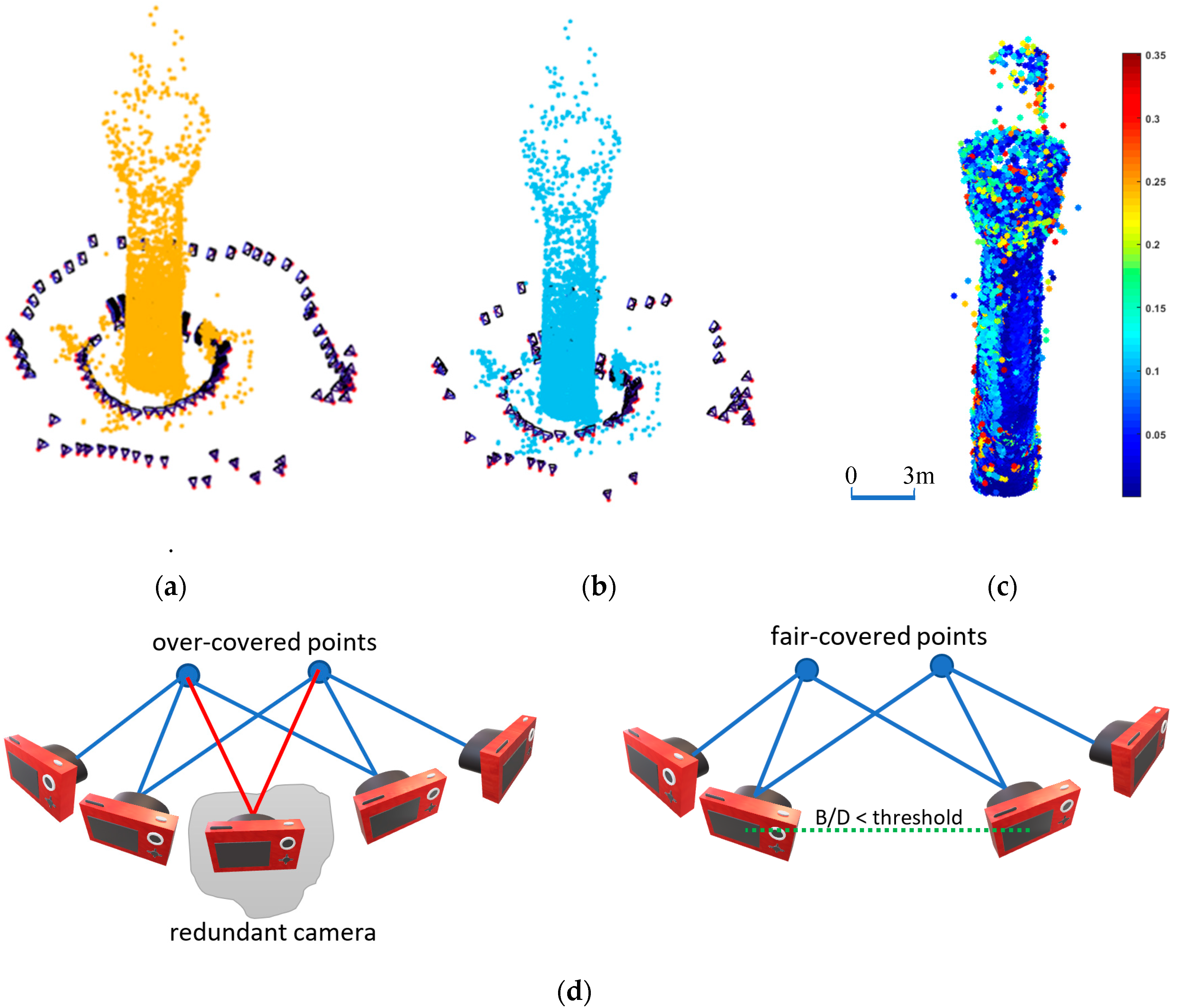
3.1.1. Close-Range Photogrammetry
- σz = precision at object space [mm]
- f = focal length [mm]
- B = base line (step size) [mm]
- p = pixel pitch (width) [mm]
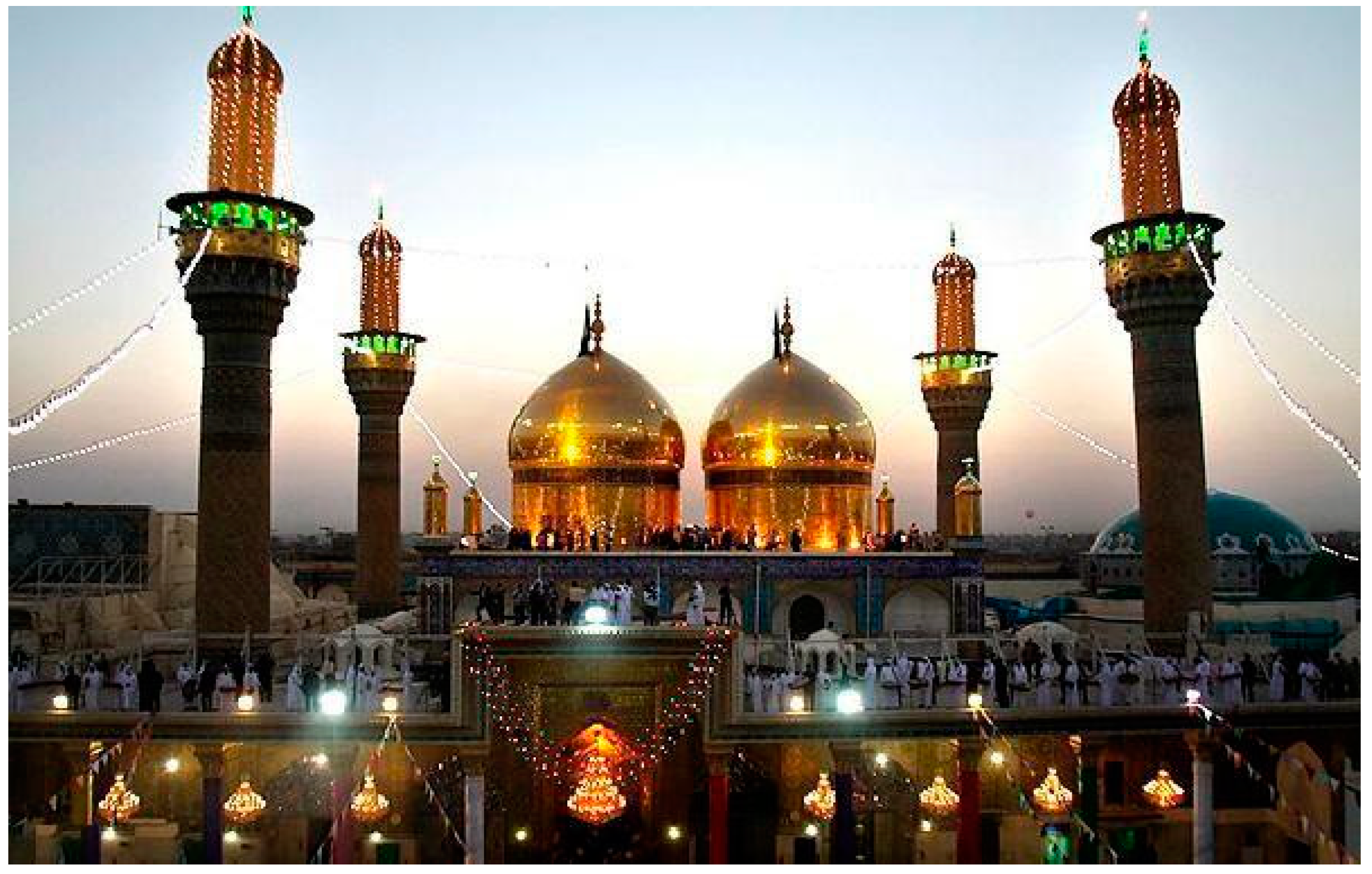
3.1.2. Geometric Primitive Fitting of the Shrine Minaret
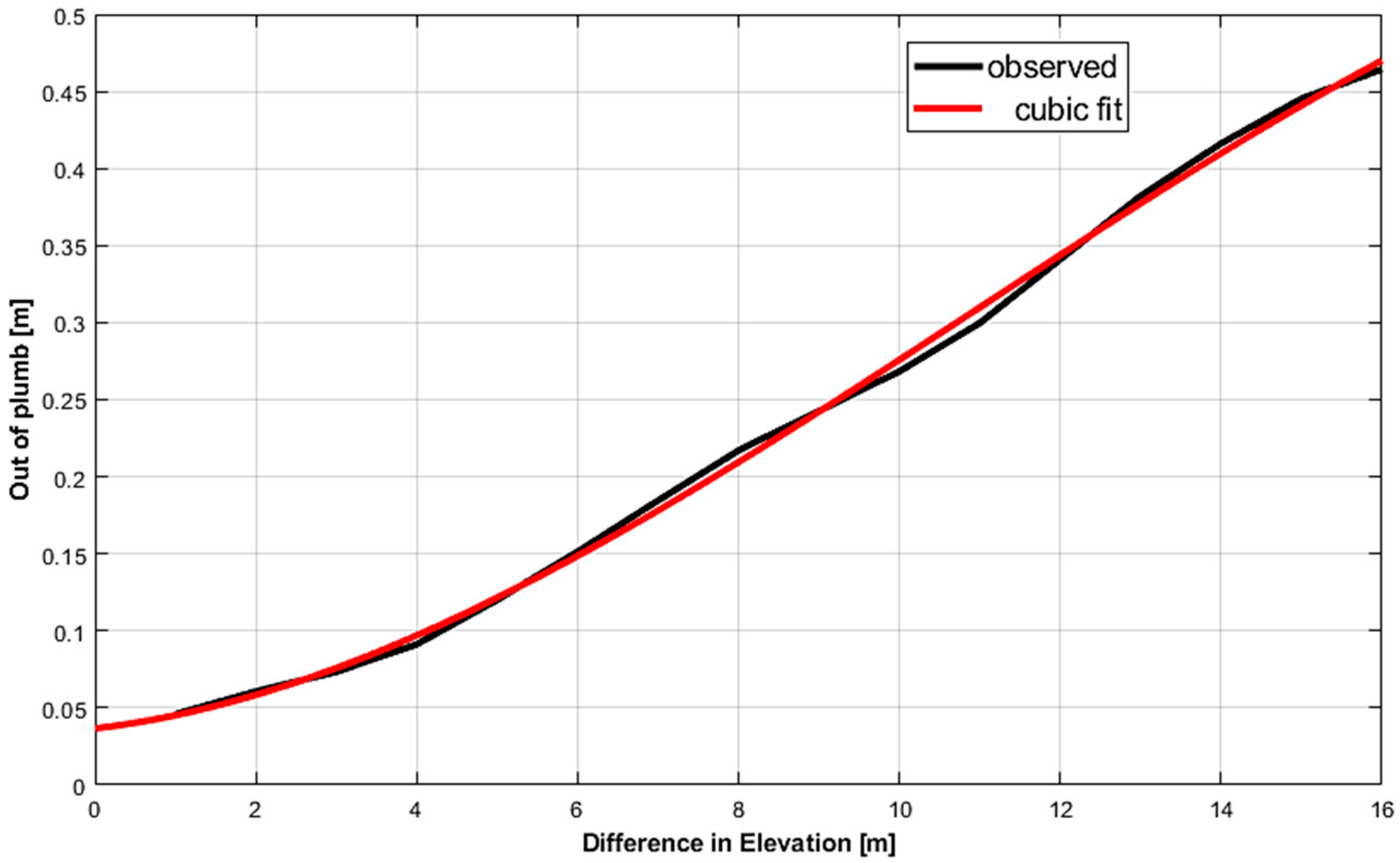
- y: the out of plumb in [m].
- x: difference of elevations [m].
- p1 = −7.84 × 10−5, p2 = 0.003, p3 = 0.006, and p4 = 0.037
3.2. Second Experiment
4. Conclusions
- Preplanning, image capture with a professional camera.
- Automated image orientation using state-of-the-art software tool.
- Using field survey control points for reality scaling.
- Creating a dense point cloud for 3D modeling of the minaret.
- and finally, to compute the out of plumb amount by primitive fitting of the point clouds.
Author Contributions
Conflicts of Interest
References
- United Nations Education, Scientific and Cultural Organization UNESCO. 2018. Available online: https://en.unesco.org/news/uae-unesco-and-iraq-conclude-historic-50m-partnership-reconstruct-mosul-s-iconic-al-nouri (accessed on 17 November 2018).
- Beshr, A.A. Structural Data Analysis for Monitoring the Deformation of Oil Storage Tanks Using Geodetic Techniques. J. Surv. Eng. 2014, 140, 1. [Google Scholar] [CrossRef]
- Ayman, H.; Ashraf, O.; Charles, M. Monitoring the structural response of historical Islamic minarets to environmental conditions. In Proceedings of the SMAR—Fourth Conference on Smart Monitoring, Assessment and Rehabilitation of Civil Structures, Zurich, Switzerland, 13–15 September 2017. [Google Scholar]
- Controlling Vertical Towers. Available online: https://w3.leica-geosystems.com/media/new/product_solution/Leica_Geosystems_TruStory_Controlling_Vertical_Towers.pdf (accessed on 15 October 2018).
- Jaafar, H.A. Detection and Localisation of Structural Deformations Using Terrestrial Laser Scanning and Generalised Procrustes Analysis. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 2017. [Google Scholar]
- Jatmiko, J.; Psimoulis, P. Deformation Monitoring of a Steel Structure Using 3D Terrestrial Laser Scanner (TLS). In Proceedings of the 24th International Workshop on Intelligent Computing in Engineering, Nottingham, UK, 10–12 July 2017; Available online: https://www.researchgate.net/publication/318658994_Deformation_Monitoring_of_a_Steel_Structure_Using_3D_Terrestrial_Laser_Scanner_TLS (accessed on 15 October 2018).
- Selbesoglu, M.O.; Bakirman, T.; Gokbayrak, O. Deformation Measurement Using Terrestrial Laser Scanner for Cultural Heritage. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Istanbul, Turkey, 16–17 October 2016; Volume XLII-2/W1, pp. 89–93. [Google Scholar]
- Gordon, S.J.; Lichti, D.D. Modeling terrestrial laser scanner data for precise structural deformation measurement. J. Surv. Eng. 2007, 133, 72–80. [Google Scholar] [CrossRef]
- Park, H.; Lee, H.; Adeli, H.; Lee, I. A new approach for health monitoring of structures: Terrestrial laser scanning. Comput. Aided Civ. Infrastruct. Eng. 2007, 22, 19–30. [Google Scholar] [CrossRef]
- Giuseppina, V.; Fausto, M.; Flavio, S. Terrestrial Laser Scanner for Monitoring the Deformations and the Damages of Buildings. In Proceedings of the XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016; Volume XLI-B5, pp. 453–460. [Google Scholar] [CrossRef]
- Hanke, K.; Grussenmeyer, P. Architectural Photogrammetry: Basic theory, Procedures, Tools. September 2002 ISPRS Commission 5 Tutorial. Available online: http://www.isprs.org/commission5/tutorial02/gruss/tut_gruss.pdf (accessed on 25 July 2018).
- Nocerino, E.; Menna, F.; Remondino, F. Accuracy of typical photogrammetric networks in cultural heritage 3D modeling projects. In The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Proceedings of the ISPRS Technical Commission V Symposium, Riva del Garda, Italy, 23–25 June 2014; ISPRS: Vienna, Austria, 2014; Volume XL-5, pp. 465–472. [Google Scholar] [CrossRef]
- Agisoft LLC. Metashape. Available online: http://www.agisoft.com/ (accessed on 1 October 2018).
- Photomodeler. Photomodeler Tecnologies. Available online: https://www.photomodeler.com/ (accessed on 11 October 2018).
- Pix4D. Available online: https://www.pix4d.com/ (accessed on 11 October 2018).
- Forbes, B.A. Least-Squares Best-Fit Geometric Elements; Report Number: NPL Report DITC 140/89; National Physical Laboratory: London, UK, 1989. [CrossRef]
- Craig, M.S. Least-Squares Fitting Algorithms of the NIST Algorithm Testing System. J. Res. Natl. Inst. Stand. Technol. 1998, 103, 634–641. [Google Scholar]
- Panyam, M.; Kurfessa, T.; Tucker, T. Least Squares Fitting of Analytic Primitives on a GPU. J. Manuf. Syst. 2008, 27, 130–135. [Google Scholar] [CrossRef]
- Ghilani, C.D.; Wolf, P.R. Adjustment Computations Spatial Data Analysis, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006; p. 398. [Google Scholar]
- Point Cloud Library PCL Documentation, How to Use Random Sample Consensus Model. Available online: http://pointclouds.org/documentation/tutorials/random_sample_consensus.php (accessed on 5 March 2018).
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Miki. Fitting a Circle to Cluster of 3D Points. 2016. Available online: https://meshlogic.github.io/posts/jupyter/curve-fitting/fitting-a-circle-to-cluster-of-3d-points/ (accessed on 21 March 2017).
- Musa_al-Kadhim Shrine. Available online: https://en.wikipedia.org/wiki/Musa_al-Kadhim (accessed on 15 February 2018).
- Abed, F.; Ibrahim, O.; Jasim, L.; Khalaf, Y.; Hameed, H.; Hussain, Z. Terrestrial Laser Scanning to Preserve Cultural Heritage in Iraq Using Monitoring Techniques. In Proceedings of the 2nd International Conference of Buildings, Construction and Environmental Engineering (BCEE2-2015), Baghdad, Iraq, 17–18 October 2015. [Google Scholar]
- Wenzel, K.; Rothermel, M.; Fritsch, D.; Haala, N. Image Acquisition and Model Selection for Multi-View Stereo. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Proceedings of the 3D-ARCH 2013—3D Virtual Reconstruction and Visualization of Complex Architectures, Trento, Italy, 25–26 February 2013; ISPRS: Vienna, Austria, 2013; Volume XL-5/W1, pp. 251–258. [Google Scholar] [CrossRef]
- Alsadik, B.; Gerke, M.; Vosselman, G.; Daham, A.; Jasim, L. Minimal Camera Networks for 3D Image Based Modeling of Cultural Heritage Objects. Sensors 2014, 14, 5785–5804. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al-Hadba’ Minaret—World Monument Fund. Available online: https://www.wmf.org/project/al-hadba%E2%80%99-minaret (accessed on 06 November 2018).
- Al-Gburi, M.; Salih, M.; Taeb, S. Study of Maintenance Al Hadba Minaret Monument in Mosul. 2010. Available online: https://www.researchgate.net/publication/268508608_Study_of_Maintenance_Al_Hadba_Minaret_Monument_in_Mosul (accessed on 15 October 2018).
- Grussenmeyer, P.; Al Khalil, O. From Metric Image Archives to Point Cloud Reconstruction: Case Study of The Great Mosque of Aleppo in Syria. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Proceedings of the 26th International CIPA Symposium, Ottawa, ON, Canada, 28 August–1 September 2017; ISPRS: Vienna, Austria, 2017; Volume XLII-2/W5. [Google Scholar] [CrossRef]
- 3D Warehouse. Available online: https://3dwarehouse.sketchup.com/?hl=en (accessed on 15 October 2018).
- Sketchfab. Available online: https://sketchfab.com/models/adefb309080844c6b78370e7c129d4c4 (accessed on 15 October 2018).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Orientation Quality | Adjusted Camera Parameters | ||
|---|---|---|---|
| GSD [mm] | 1.5 | Focal length [mm] | 23.88 |
| Pixel size [µm] | 6.0 | p.p in x [mm] | 0.113261 |
| Maximum reprojection error [pixel] | 1.36 | p.p in y [mm] | 0.131599 |
| Median reprojection error [pixel] | 0.23 | Radial lens distortion k1 | −0.133579 |
| Mean reprojection error [pixel] | 0.37 | Radial lens distortion k2 | 0.092059 |
| xo [m] | yo [m] | zo [m] | a | b | c | Out of Plumb [m] | |
|---|---|---|---|---|---|---|---|
| Cylinder fitting | 136.94 | 114.89 | 31.37 | 0.019216 | −0.019097 | 0.99963 | 0.43 |
| Cone fitting | 136.94 | 114.89 | 31.37 | 0.020305 | −0.019289 | 0.99961 | 0.44 |
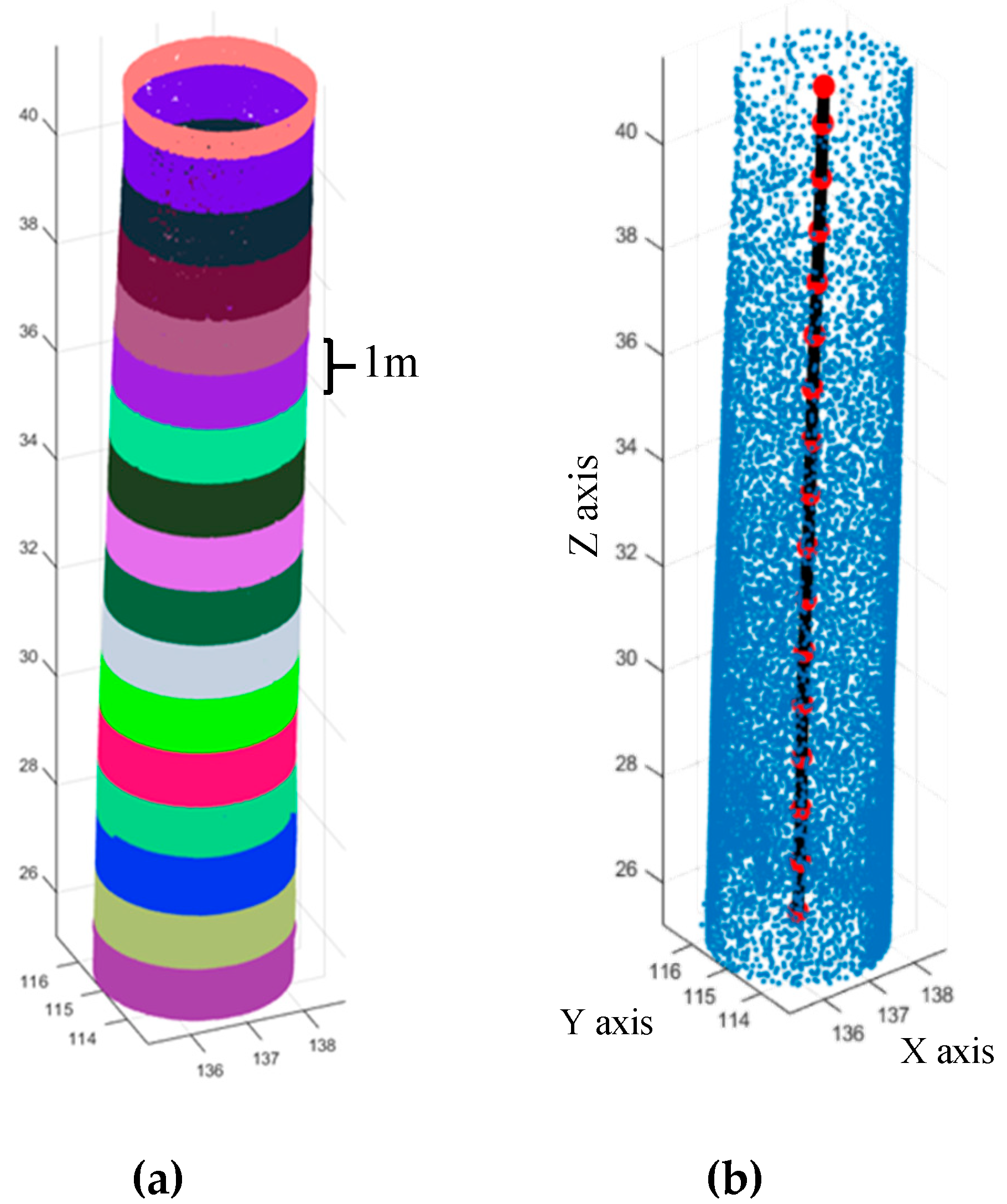
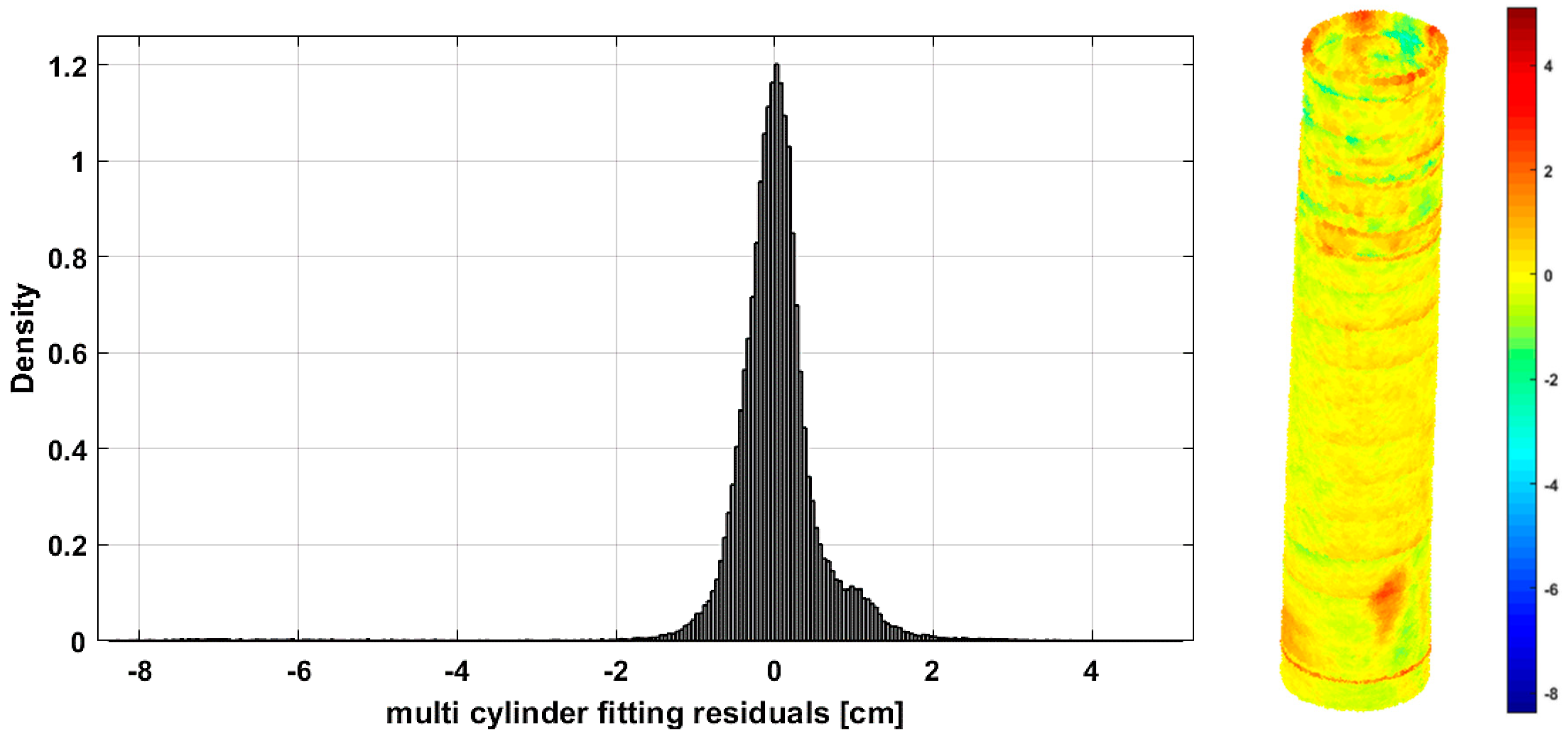
| Section | xo [m] | yo [m] | zo [m] | a | b | c | R [m] | Out of Plumb [m] |
|---|---|---|---|---|---|---|---|---|
| 1st | 136.84 | 114.99 | 25.72 | 0.0177 | −0.0207 | 0.9996 | 1.608 | - |
| 2nd | 136.86 | 114.97 | 26.69 | 0.0148 | −0.0265 | 0.9995 | 1.592 | 0.03 |
| 3rd | 136.87 | 114.96 | 27.69 | 0.0095 | −0.0049 | 0.9999 | 1.594 | 0.04 |
| 4th | 136.88 | 114.95 | 28.67 | −0.0007 | −0.0132 | 0.9999 | 1.585 | 0.06 |
| 5th | 136.89 | 114.93 | 29.69 | 0.0193 | −0.0176 | 0.9997 | 1.577 | 0.07 |
| 6th | 136.91 | 114.91 | 30.68 | 0.0231 | −0.0249 | 0.9994 | 1.574 | 0.10 |
| 7th | 136.93 | 114.89 | 31.67 | 0.0251 | −0.0241 | 0.9994 | 1.571 | 0.14 |
| 8th | 136.96 | 114.87 | 32.67 | 0.0262 | −0.0223 | 0.9994 | 1.568 | 0.17 |
| 9th | 136.98 | 114.85 | 33.68 | 0.0210 | −0.0169 | 0.9996 | 1.567 | 0.20 |
| 10th | 137.00 | 114.83 | 34.68 | 0.0201 | −0.0223 | 0.9995 | 1.563 | 0.23 |
| 11th | 137.02 | 114.81 | 35.67 | 0.0205 | −0.0154 | 0.9997 | 1.557 | 0.25 |
| 12th | 137.05 | 114.79 | 36.69 | 0.0288 | −0.0294 | 0.9992 | 1.552 | 0.29 |
| 13th | 137.08 | 114.77 | 37.68 | 0.0305 | −0.0241 | 0.9992 | 1.544 | 0.33 |
| 14th | 137.11 | 114.74 | 38.67 | 0.0182 | −0.0308 | 0.9994 | 1.534 | 0.37 |
| 15th | 137.13 | 114.71 | 39.67 | 0.0163 | −0.0229 | 0.9996 | 1.525 | 0.40 |
| 16th | 137.15 | 114.69 | 40.71 | 0.0228 | −0.0093 | 0.9997 | 1.515 | 0.43 |
| 17th | 137.17 | 114.68 | 41.41 | 0.0074 | −0.0139 | 0.9999 | 1.530 | 0.45 |
| xo [m] | yo [m] | zo [m] | a | b | c | Out of Plumb [m] | |
|---|---|---|---|---|---|---|---|
| Cone fitting | 104.76 | 104.58 | 31.477 | 0.016572 | −0.063281 | 0.99786 | 1.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsadik, B.; Abdulateef, N.A.; Khalaf, Y.H. Out of Plumb Assessment for Cylindrical-Like Minaret Structures Using Geometric Primitives Fitting. ISPRS Int. J. Geo-Inf. 2019, 8, 64. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8020064
Alsadik B, Abdulateef NA, Khalaf YH. Out of Plumb Assessment for Cylindrical-Like Minaret Structures Using Geometric Primitives Fitting. ISPRS International Journal of Geo-Information. 2019; 8(2):64. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8020064
Chicago/Turabian StyleAlsadik, Bashar, Nagham Amer Abdulateef, and Yousif Husain Khalaf. 2019. "Out of Plumb Assessment for Cylindrical-Like Minaret Structures Using Geometric Primitives Fitting" ISPRS International Journal of Geo-Information 8, no. 2: 64. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi8020064