1. Introduction
The modeling of space in a geospatial context has been explored extensively over the past decade. But traditionally the focus has mostly been on the outdoors for reasons like the initial effort to draw a direct parallel to the then existing cartographic applications and a need for a robust navigation model for different modes of transport (roads, railways, air space). The ease of availability of data in the form of satellite imagery as well as an effective positioning system also helped as a driving force.
We, in our usual daily lives, spend just a fraction of our time outside and a majority of it is spent indoors. A lot of application scenarios involving indoor spaces have come up like 3D and textured visualization of building floors, indoor navigation and way-finding, evacuation path-planning, simulation and analysis. With the increase in the usage of hand-held devices, the advancement of technology it packs and the formalisation of architectural design standards, the data capture and dissemination is no more an issue holding the reins of indoor modeling. Hence there has been a shift of focus to effectively capture the properties of indoor spaces that are needed for such applications.
Digital model of Indoor Space is defined and represented using Form and Space. Space is the primary element of architecture and its basic building block whereas architectural Form is the point of contact between mass and space. Space is an intangible entity, which may be perceived solely through personal traversing but not explicitly quantified and is characterized by the physical envelope or constraints within which it is enveloped.
“We pierce doors and windows to make a house; and it is on these spaces where there is nothing that the utility of the house depends. Therefore, just as we take advantage of what is, we should recognise the utility of what is not.—Lao-tzu, Tao Te Ching, 6th century B.C.”
For any given building, the space enclosed by the built mass is what generally defines its respective function and form. However, an antithesis of these occupied spaces is the unbuilt spaces, or voids in a given built fabric [
1], which is essentially the empty space. The formats in which the indoor data is available have these built features as its components. This data is insufficient for use in many application scenarios without processing and modeling it appropriately. For example, while 3D visualization may need the geometric information with its surface characteristics, an indoor navigational model will need the connectivity of spaces and other semantic properties like occupancy and functional use of such spaces. So, it is becoming increasingly necessary to both capture and relate the core physical model of the indoor spaces with its semantic information, with the latter being selectively used depending on the application or purpose for which the indoor data model is being used for.
Indoor data is organized, represented and consumed at three levels. The first or basic level of the data organization is at the data capture level itself which essentially has raw data, predominantly the geometrical component. At the next level, this raw data is represented using domain–specific data formats like DXF, IFC, CityGML, IndoorGML and so forth, to model the indoor environment in the digital world. In addition, international standards like ISO/135667, ISO/TC211, ISO CD 19166 and others provide the basis for storing and managing these data. The applications form the third or final level, where the data is consumed for development of highly customized and tailor-made solutions according to the specific needs of the different domains.
1.1. Indoor Data Capture
Historically, the data for indoor space has been represented using the floor plans of the buildings. A lot of work has been done to capture the physical characteristics of the space, from the corresponding building plan or drawing by extracting the primitive elements that make up the built space [
2,
3], usually with the focus of deriving the boundary of these spaces.
There is a lot of implied and given semantic knowledge which is also represented in building drawings [
4]. These are in the form of well–defined annotations, symbols or labels describing the functional characteristics of the space. Approaches have been proposed to aggregate this information by extracting the annotations [
5] or to define this information using the geometric information and the domain knowledge [
6]. Further, CAD and BIM have also evolved to define not only the boundary of these spaces but also information pertaining to the elements that occupy it like furniture, obstacles and other objects. On the other hand, recent years have seen a shift towards creating the indoor data by scanning the building using terrestrial laser scanners [
7,
8] or depth-camera enabled devices [
9]. Although they provide a high resolution 3D data to work with, rich in geometric and surface information locally, there is still a need to identify and label the spaces they indicate for better comprehension of the indoor world being represented.
1.2. Semantic Information in Applications Based on Indoor Data
The captured indoor data requires proper processing and modeling for it to be usable in an application scenario. This has led to the development of customized building models which cater to these specific goals.
For the purpose of visualization, the data from 2-dimensional building drawings have been used to create 3D building models [
10,
11,
12]. These are primarily focused on capturing only geometric data without taking into account relevant semantic information. This leads to a loss of context which is usually compensated by visually appealing representations of the building. The semantics is left to be derived by the end user.
In the context of navigation applications, the approach has been to use IFC data model, 2D floor plans or drawings as the data source to define a geometric model from which the navigational routes can be identified. Works like [
13,
14] have focused on a grid-based approach in which the space is defined as multiple discrete cells of non-overlapping areas. Others have defined the spaces and obstacles as polygonal features using the boundary information and used a node-graph relation to define the navigational routes [
15,
16]. These approaches fail to capture all the semantic information that the data model has to offer.
Using both the geometric properties for physical completeness as well as semantic information for contextual awareness, some researchers have defined hybrid models. Although these approaches cover the above mentioned shortcomings, it is usually focused on a particular domain or application like indoor contextual awareness [
17], navigation [
18,
19] and evacuation path planning [
20] or restricted to a specific data model like IFC [
21,
22] and CityGML [
23].
The exchange of information between these models is usually not feasible due to the specific nature of their implementation and even when it is feasible, it is limited in nature due to a non-existent standard approach for doing so. Hence a requirement for a well-defined model can be inferred which should be capable of streamlining the indoor data captured using various techniques and be useful in the myriad application scenarios. This can only be achieved if such a model is not dependant on the data to be captured in a specific manner and is able to account for the physical as well as semantic data of the indoor spaces.
1.3. Indoor Data Model Standards
Current prevalent data standards for describing and storing indoor data are CAD drawings, BIM IFC model, CityGML Indoor ADE (Application Domain Extension) and IndoorGML. Traditionally, drawings have been used by architects and designers to define the layout of the building along with functional use of the spaces. It is one of the most widely used and available standard to define a building’s specification. While these are rich in information for a human user, they are not machine-interpretable for applications other than those that are modelling the physical indoor environment. On the other hand, BIM (Building Information Model) is becoming a primary standard in the AEC (Architecture, Engineering and Construction) industry to capture and store the building and its attributes at an elemental level with an in-built space hierarchy for interpreting the built-environment [
24]. Due to the use of constructive solid geometry in BIM, it poses a challenge to applications that would like to decipher space topology or derive spatial interactions using this data.
The Geospatial community’s treatment of indoor environment has led to the development of
CityGML with the Indoor ADE and
IndoorGML. CityGML describes the indoors at different level of details (LODs) [
25], with LOD3 capturing the indoor boundary surfaces and LOD4 to describe the furniture and other indoor elements. IndoorGML is an OGC standard for defining indoor spatial information with specific focus on indoor navigation [
26].
Although CityGML Indoor ADE provides a good model for representing the building entities in a queryable model, adding semantic information to this may be a challenge due to its feature based approach to space definition. The IndoorGML’s use of a cell based approach to define spaces can be better exploited for identifying and tagging the semantic content [
27]. Also, IndoorGML data model has the ability to define thematic extensions [
28] to it. It provides a flexible way to store the geometry either in the model itself by using GML notation or by referencing external data sources (like IFC or CityGML). This makes it a good candidate for implementing and showcasing a generic space model.
1.4. Objective
The approach adopted by most researchers involves reconstruction of data catered to a specific goal, making it limited in use. In cases where the goal is generic in nature, the models have overlooked the importance of semantics of space. This makes the modeling approach incomplete in terms of usability beyond the scope for which it was defined. Hence, there is a need for a spatial model which incorporates the important aspects of the indoor space and preserves information that can be used in many other application scenarios. One of the requirements for such generic modelling approach is to have a set of well defined space semantics. Hence this paper first, proposes an ontology for the indoor spaces based on a broad classification of the Indoor spaces, which is then used to present a Space Semantic model for indoor environments. Further, the paper demonstrates the utility of the space semantic model through an extension to IndoorGML that captures the semantic information and relates it to the core geometric model. While the paper proposes a generic model for indoor environments along with its classes, it is to be noted here that the current scope of the paper is limited to only the spatial elements and features that are readily available in digital drawings of floor plans. A discussion on all fittings and other service elements within an indoor environment is out of the current scope.
This paper is divided into the following sections.
Section 2 describes the parameter for classification and the ontology of indoor space, based on which a space semantic model is defined in
Section 3 with the details of the properties of its features presented.
Section 4 discusses how to store the data in the Space Semantic Model, for which an extension to IndoorGML core module is proposed and its schema structure is defined. This is followed by
Section 5 where discussion is presented including possible extensions to this approach.
Appendix A lists the schema definition of the proposed IndoorGML extension.
2. Classification and Ontology of Indoor Space
2.1. Indoor Environment definition and Classification
Building indoors are created by carving space out of space, creating space out of space and designing spaces by dividing this space using various tools, such as geometry, colours and shapes. Architectural Spaces are defined based on the form, function and qualities (see
Figure 1) and the information captured or available may vary across different designs, making it difficult for machines or computers to interpret. While some of these are syntactic and may be transferable, the semantic components are not well standardized.
Indoor spatial environment is represented in the digital world by using certain primitive elements like walls, door, windows, beams, columns and so forth based on predefined features, according to the AEC domain. These primitive elements help in defining these spaces, for example an opaque wall helps in disconnecting one space from another while doors and windows connect spaces to each other, thus creating a composed indoor spatial environment inside the building envelope.
At a macro level, the indoor space can be understood in terms of its data, which is essentially its syntactic information or in terms of its semantic functional value and utility, which is of significance to the end user but may not be available or captured in the data itself. Keeping this in mind and the fact that various data sources label similar types of spaces using different terms, for ease of modeling and effectively capturing indoor data, there is a need for a common framework to classify and arrange these spaces in a logical structure. Towards this goal and based on the premise that spaces in indoor environment are primarily defined by enclosures or enclosed extents, a classification of indoor spaces is proposed here.
The different categories this paper suggests to capture various kind of spaces present in an indoor environment are–
Standard Space: A standard enclosed space is a basic kind of indoor space that exists with well defined boundaries and is geometrically enclosed within an indoor environment. This primary space has one or more connecting elements like door to provide access to another indoor space or the exterior environment. As shown in
Table 1, different kinds of rooms can belong to this category. The syntactic data or information of this space is generally available in most data sources.
Connecting Space: A space which connects existing standard and other spaces in the indoor environment, either horizontally or vertically and has a transitional capacity is defined as a connecting space. The enclosure of these type of spaces is derived from the geometries of the existing standard spaces around it. The purpose of these spaces is to allow for traversal from one space to another. For example: corridor, staircase, elevator, entrance/exits, aisles and so forth.
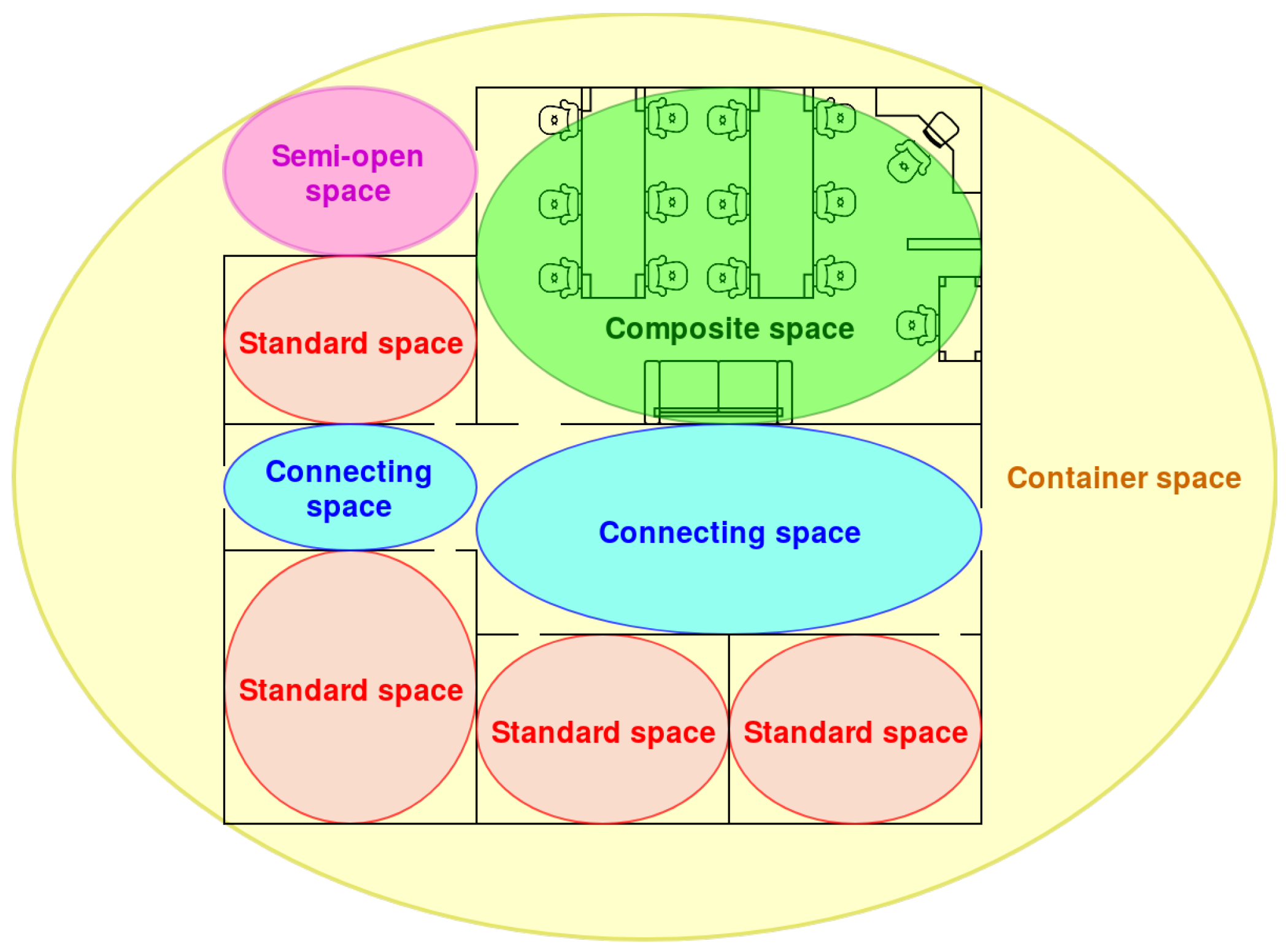
Composite Space: These spaces are initially defined in a drawing with clear boundaries as spaces covering a large expanse and within which the layout of the furniture and/or other elements enables or disables certain kinds of movement making the traversal complex in nature. This complexity implicitly creates a subdivision where each subspace can be considered as belonging to one of the classes defined under standard and connecting spaces. Spaces like auditoriums, movie theatres, large office halls with cubicles and others fall under this category.
Container Space: A container space is defined as a higher level space which contains one or more types of spaces as stated above. It is defined as a block of space belonging to the building, either horizontally or vertically, with clearly defined connections to the rest of the blocks. For example, its expanse may be limited to a single floor or span multiple floors, like a floor level in a building or duplex apartments belonging to different tenants in a building respectively.
Figure 2 shows an example of a container space containing other types of spaces.
Semi-enclosed/Semi-open Space: These types of spaces are extensions of the building and are contiguous to the indoor space environment. The bounding geometry of such a space maybe explicit or implicit and can be derived by the boundaries of the adjacent indoor spaces. These spaces have an access point or connectivity to it through the indoor environment. For example: balcony, porch, yard and so forth. In some cases or applications like evacuation modeling, these spaces may connect to the external environment too. In most cases, they may have a transitional capacity.
The definition of the first three categories of spaces comes directly from their syntactic properties and thus are captured in our proposed semantic model. Instead of defining a Container space explicitly, the information about the floor or the block in which a particular space belongs to can be stored as a semantic attribute.The Semi-enclosed/Semi-open space even though may be open in one or more of the planes (like the ceiling or one or more sides) but it still has an implicit boundary. So in-order to capture this geometry it is treated like a Standard space in the semantic model.
2.2. Ontological Framework for Indoor Space
Different approaches have been explored by researchers to define an indoor space ontology. Some have used the existing upper level ontology like BFO (Basic Formal Ontology) and built upon it by applying the concept of ’affordance’ which defines the set of possible actions or properties that an entity may have [
29]. Others have focused on defining application specific ontology for indoor navigation and routing [
18,
30,
31]. Some have presented a 3D building ontology describing buildings with indoor spatial environments with the aim of extending the Open Street Map (OSM) tagging schema to accommodate this information and move towards a collaborative indoor mapping effort [
32].
While these models are either application specific or based on a larger framework, a need for capturing computational aspects and meaningful description of the space is needed. Hence deriving from the classification, we want to provide a framework to capture this information for which an indoor space ontology is defined.
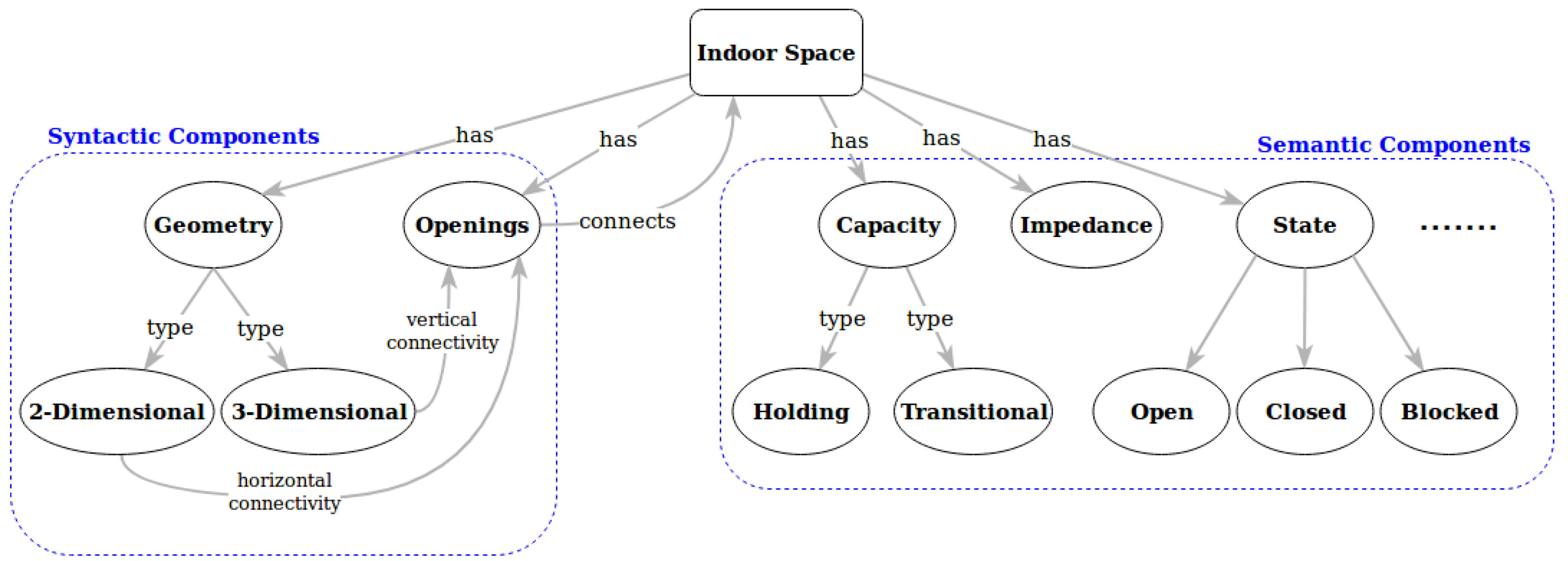
Indoor spaces, with its form and space, have a plethora of characteristics associated with them. It can be confined or unconfined (a standard space or a semi-open space) based on the surroundings or can have specific purpose for which it may be used like transition or movement (in a connecting space like corridor), storage (store-room, server-room) or as a gathering point (a lobby or a yard). As we are interested in both physical properties as well as functional characteristics of these spaces, an ontology has been defined that encompasses both the facets. The proposed ontological framework consists of two components—a syntactic and a semantic component, with its associated features as shown in the
Figure 3 and elaborated below. The features and properties shown in the figure are illustrative and can be expanded as per the needs of the information model adopted.
2.2.1. Syntactic Component
This component of the framework is derived from the very form of the space and how it is represented. Hence it includes properties based on the physical characteristics like its degree of enclosure, shape, size, dimensions and the associated openings into or from this space. These properties are mostly geometric in nature, like for a Standard space, (as per classification in
Section 2.1) there would always be a well defined boundary, which is obtainable from architectural and other drawings and do provide a concise representation of the space. The horizontal connectivity of the space can be defined by its two-dimensional geometry and properties. The partition of the vertical environment which defines the vertical topology (floors or levels) and also how open the space is with respect to the external environment is derived using the three-dimensional geometry of the space. These properties of the space and its confines are well suited for visualisation, deriving topology and generating basic navigational routes.
2.2.2. Semantic Component
Spaces have been designed for provision and use for a stated purpose and/or its aesthetic value. It is important to capture these information along with all its stated and unstated uses or interactions that may be useful in various applications. So, as part of this component of ontology, the semantic properties of the space are captured and stored. This primarily comes from the architectural terminology and is usually used in the building drawings. The types of semantic information can include the floor level of the space (which captures the property of Container space), its functional use (see
Table 1) as well as any type of labels associated with it. These labels contain implied semantic information on the basis of which the properties of the space can be defined. For example—An office room implies a holding capacity (no. of people the space can hold) as well as access restrictions regarding the door being locked/unlocked. This kind of information can play an important role in scenarios such as evacuation where these constraints need to be accounted for while planning the best navigation routes.
The final model to be built on this ontology can have either of these components or both. The reason to use a modular approach to define the ontology is that many of the application oriented models may want to extract only the geometric characteristic and build on it, whereas others may focus on the usability or properties of the spaces. Hence an incremental approach is used for adopting the data that may be available and then building or deriving the data that may be needed. For completeness, the ontology accounts for both of them.
3. Indoor Space Semantic Model
The ontology defined earlier provides for a framework for the management of data about indoor spaces. In this section, we propose a conceptual Indoor Space Semantic Model that can incorporate information from both these components and help develop a suite of terms (based on the categories defined in
Section 2.1) that may be generically used to capture and model indoor space environments. This model extends over our earlier work on defining a semantic model for indoor space containing the syntactic as well as semantic information of spaces [
33], by defining an additional set of classes for completeness and revising and providing an in-depth definition of the existing ones for better understanding/clarity. Here we demonstrate how the model accounts for the semantic components, using mobility as a use case. The following terms are introduced in the semantic component for capturing the relevant information of such spaces–
Occupancy/Capacity of the space: The number of people the space can hold as well as whether it is a holding capacity or transitional one is defined as part of this feature.
Flow along the space: Properties such as impedance, state of the space or opening and distance from the openings.
This model defines the indoor spaces as a set of features belonging to a particular class and containing attributes corresponding to it. This is decided based on the geometry of the space, its connectivity with other spaces and the functional characteristics of the space. The functional label coming from the semantic component of ontology may be very specific but in terms of the focus of our work, those classes they represent are one of the members from the set of generic feature classes defined as follows:
Standard Space
- (a)
Room (R)
- (b)
Semi-enclosed/Semi-open Space (O)
Connecting Space
- (a)
Opening (Door/Window) (D)
- (b)
Corridor (C)
- (c)
Junction (J)
- (d)
Stairwell (S)
- (e)
Lift-well (L)
Composite Space
Following are the definitions of each type of space as is inferred in the proposed model and also provides for a minimum set of properties to be captured as per the ontological framework. As stated earlier, the semantic components of the definition are based on the use case of mobility and are indicative of the level of information that the model allows to be incorporated.
3.1. Standard Space
3.1.1. Room (R)
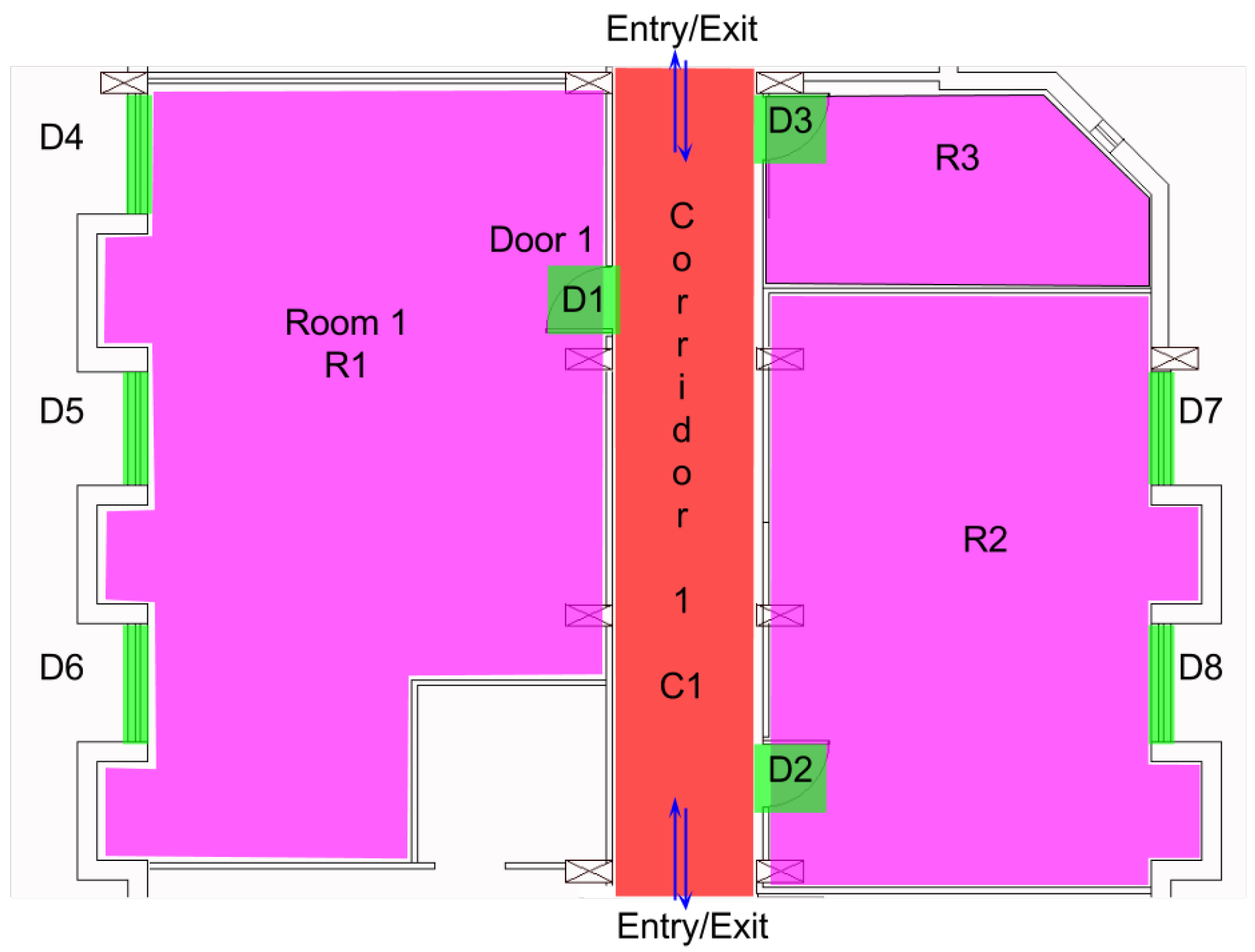
A room is defined as the most basic element of the indoor space environment. It is a generic definition for any space which can contain something (people in case of a bedroom/office or equipment in case of a store room). A depiction of rooms can be seen in
Figure 4. As part of the syntactic component, the model captures its geometric properties like the vertices, the area, location or center of the opening, space centroid and others. As part of mobility related semantics, the model allows for capture of occupancy as capacity of the room, access restrictions on the openings and other impedance factors within the space. So, the proposed Room class, as a semantic space, will have the following attributes:
Geometry
Capacity: holding capacity (non-zero and positive)
Openings: Doors/Windows
Floor level
Distance to each opening from the centroid of the room
Impedance (Calculated based on the obstacles in the space like furniture)
Other properties based on the special case of room: access restrictions, accessibility.
3.1.2. Semi-Enclosed/Semi-Open Space (O)
In the context of the model this space is defined as a space which is contiguous to the indoor building environment and may not be fully enclosed along all the planes. We account for such spaces as either semi-open spaces inside the building like a courtyard or semi-enclosed spaces like a verandah or porch, having a capacity attribute which can be holding or transitional based on the use and location of the space in an evacuation scenario. As shown in
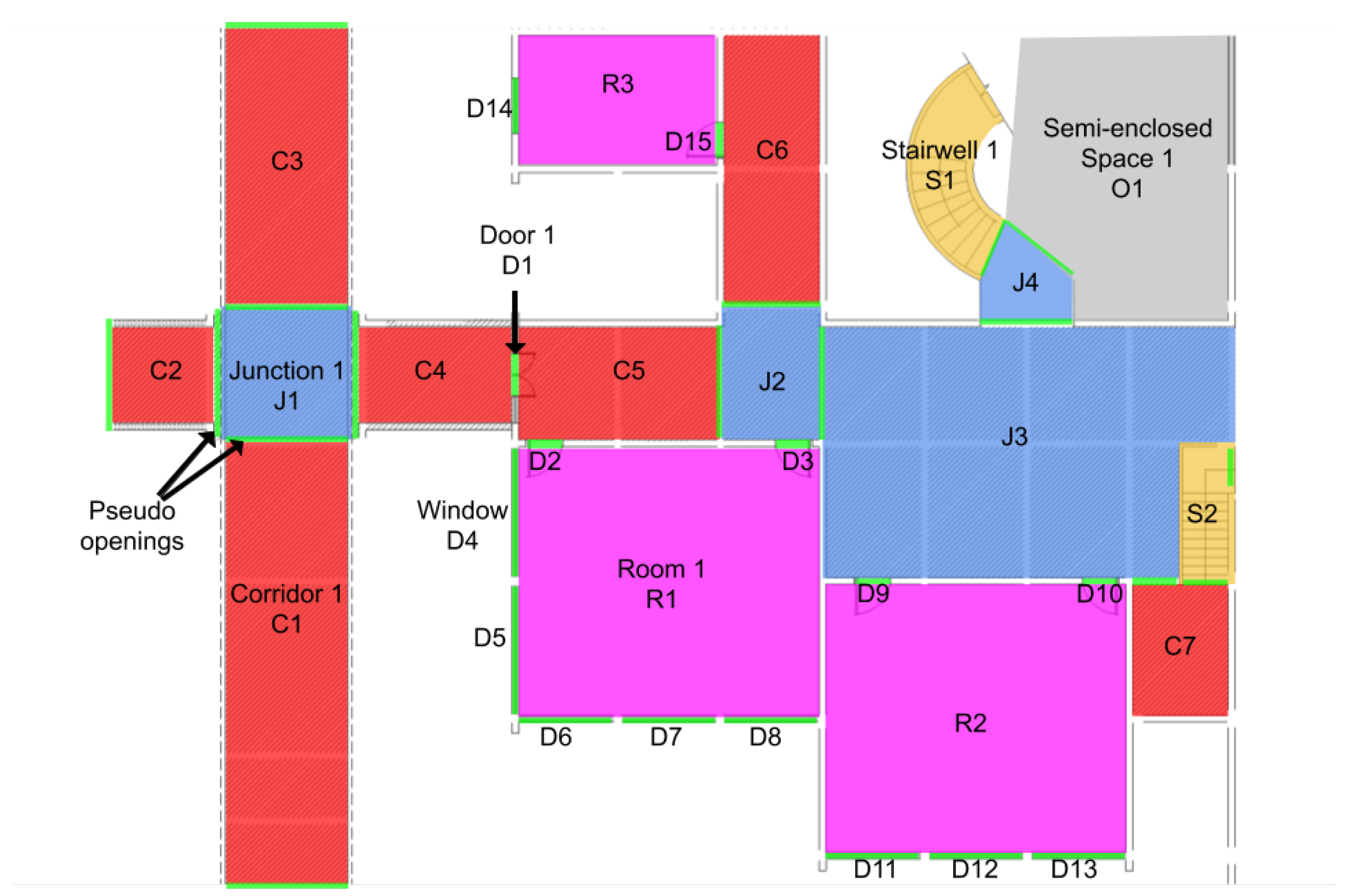
Table 1, spaces like balcony, terrace, porch and backyard would be classified as this type of space. An example of a semi-enclosed/semi-open space along with other space classes can be seen in
Figure 5.
The attributes defined for this space are:
3.2. Connecting Space
3.2.1. Opening: Door/Window (D)
An opening, while not exactly a space, is a basic element which provides connectivity between two spaces. There are three types of openings that have been considered in this model:
Doors: A door provides a passage and connects two different spaces to each other or an interior space to the exterior of the building.
Windows: While a window may not always connect two indoor spaces, it can provide an access point during an emergency for coming in or going out of the building.
Pseudo openings: These type of openings do not have a physical frame but they either exist as gaps in the walls or are the points at which a space is subdivided. Hence named as a pseudo opening due to its derived nature and a need for explicit definition.
An example of different types of openings (doors, windows or pseudo openings) can be seen marked in
Figure 4 and
Figure 5. Properties like the clearance capacity and information regarding which spaces the opening connects can be derived using its geometry and topological relationships with other spaces. But, other properties like the state of the opening (whether it is open, closed, locked or blocked), access restrictions (bio-metric or RFID identification, key required) and cost of changing the state to open, need to be considered and included in its semantic dataset. The proposed attributes are:
Geometry
Capacity: clearance capacity—number of people who can pass through within a given time
Connects: identifiers of the spaces connected
Floor level
State: open, closed or blocked
Cost of changing the state (from closed or blocked to open)
Accessibility: key, card, bio-metric.
3.2.2. Corridor (C)
A corridor by definition is a passageway into which rooms or standard spaces open. It is usually an empty and elongated space which lies outside rooms and serves its purpose to provide access between them within a building. In case of evacuation, a corridor acts as the main path for evacuees to traverse and will provide for a major flow from different rooms and openings towards the exit.
Different spaces like aisle, breezeway, walkway or concourse can be considered as corridors. They usually have two major entry and exit points which describe the flow of people while the openings of the rooms provide intermediate access.
Figure 4 gives an example of a corridor with multiple rooms opening to it. Information about the
dimensions helps to define the
capacity and the location of
openings helps in identifying the limiting factors regarding the flow towards the exit like the transitional constraint and
congestion. So, the attributes that are captured for this space are:
Geometry
Capacity: transition capacity
Major openings: Entry/exit points
Other openings
Floor level
Congestion: based on the density of people in the space
Impedance (Calculated based on the obstacles in the space).
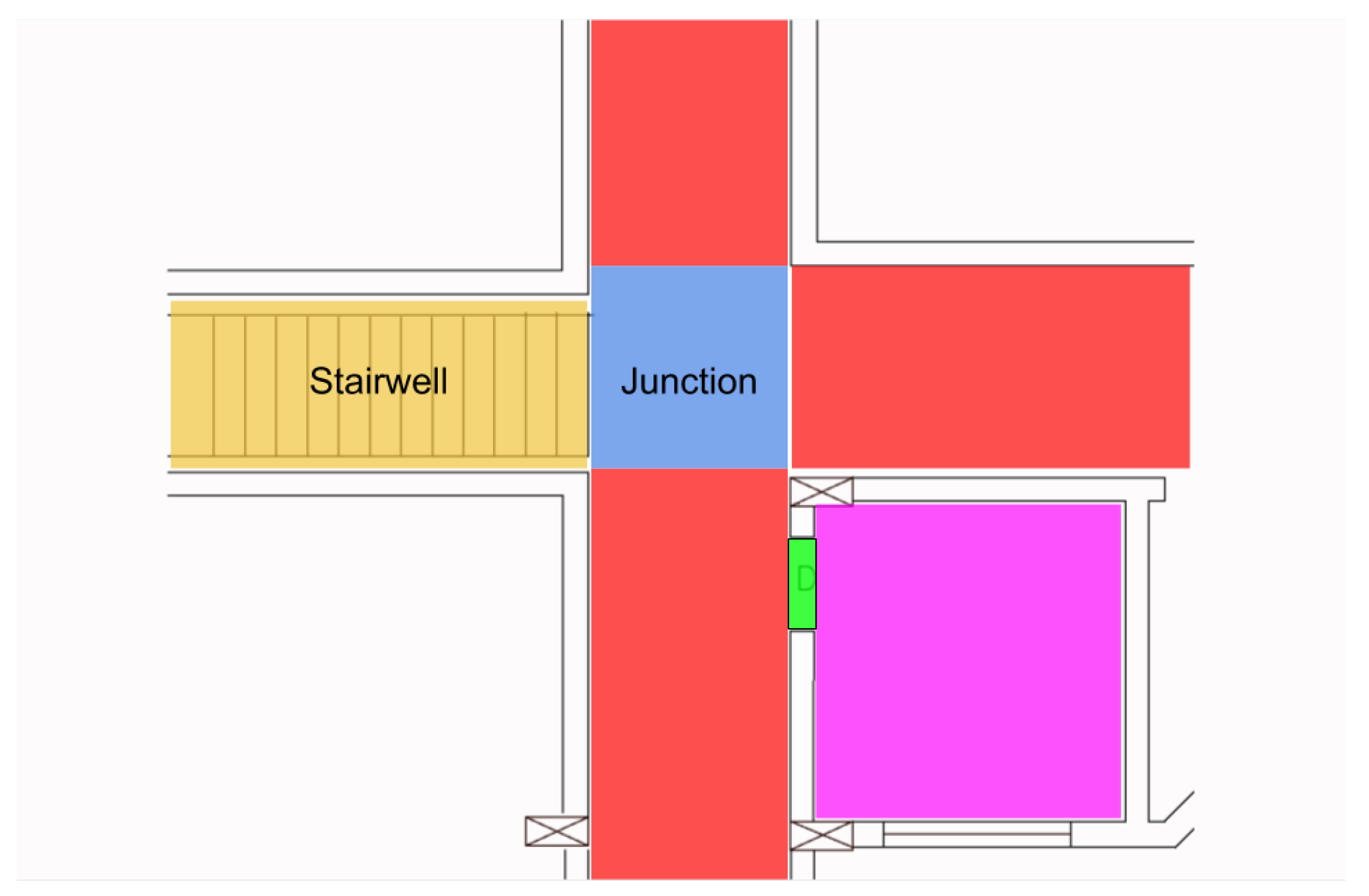
3.2.3. Junction (J)
A junction is defined as a space which acts as an intersection point for corridors, rooms and other spaces and connects different parts of the building. Rather than being a basic element of space, a junction is more of a derived space by the subdivision of existing spaces and thus may be semi-open/partially enclosed. This is done in order to provide a separate class for spaces which act solely as an intersection points for other spaces. The openings may not explicitly exist in a junction since it is a subspace.
Figure 6 depicts a junction where multiple corridors and a staircase meet. The attributes that describe the junction space class are:
Geometry
Capacity: transition capacity
Openings
Floor level
Congestion: based on the density of people in the space
Impedance (Calculated based on the obstacles in the space).
3.2.4. Stairwell (S)
A staircase, escalator or ramp provides the vertical or inter-level connectivity in a building. They are quite similar to a corridor, being a transitional space with two major entry/exit points with the difference being the vertical rise of the space.
This space class is one of the spaces which allows the connection between two floors and usually may have a landing space between the floors. These landing spaces can be defined as junctions.
Figure 6 shows a staircase marked on the part of a floor-plan. The attributes for this class of space are–
Geometry
Capacity: transition capacity
Openings: Entry/Exit points
Connects: immediate floor levels
State: blocked or clear
Vertical component
- -
Step height and number of steps (in case of staircase)
- -
Slope angle and length (in case of ramp)
- -
Direction—up or down (in case of escalator)
Impedance (Calculated based on the obstacles in the space or its condition)
Travel time between floor.
Depending on the application schema needs, either the physical characteristics are captured in the vertical component or the travel time is stored as a functional attribute.
3.2.5. Lift well (L)
The spaces which have a purely vertical component and provide vertical connectivity comes under this definition. Examples would include elevators, service ducts, garbage chute and so forth. In terms of mobility, elevators are the ones which are considered for our model and the attributes are defined as:
Geometry
Capacity (non-zero values for passenger lifts)
Openings: entry/exit point at each floor where it is accessible
Floor range: a list of floors where the elevator connects to
Time taken to traverse a floor.
3.3. Composite Space
Hall (H)
Spaces which fall under the category of
Composite space (as per the definition given in
Section 2.1) are defined as belonging to the class
Hall. Here
Hall is a proxy for all geometrically large spaces with a high capacity and complex interior layout. In the model, such a space is handled by subdividing it into different subspaces and modeling this divided set of spaces as belonging to the classes defined under the Standard and Connecting space. This is done because the complexity of traversing such a large space may be as complex as traversing in a building itself.
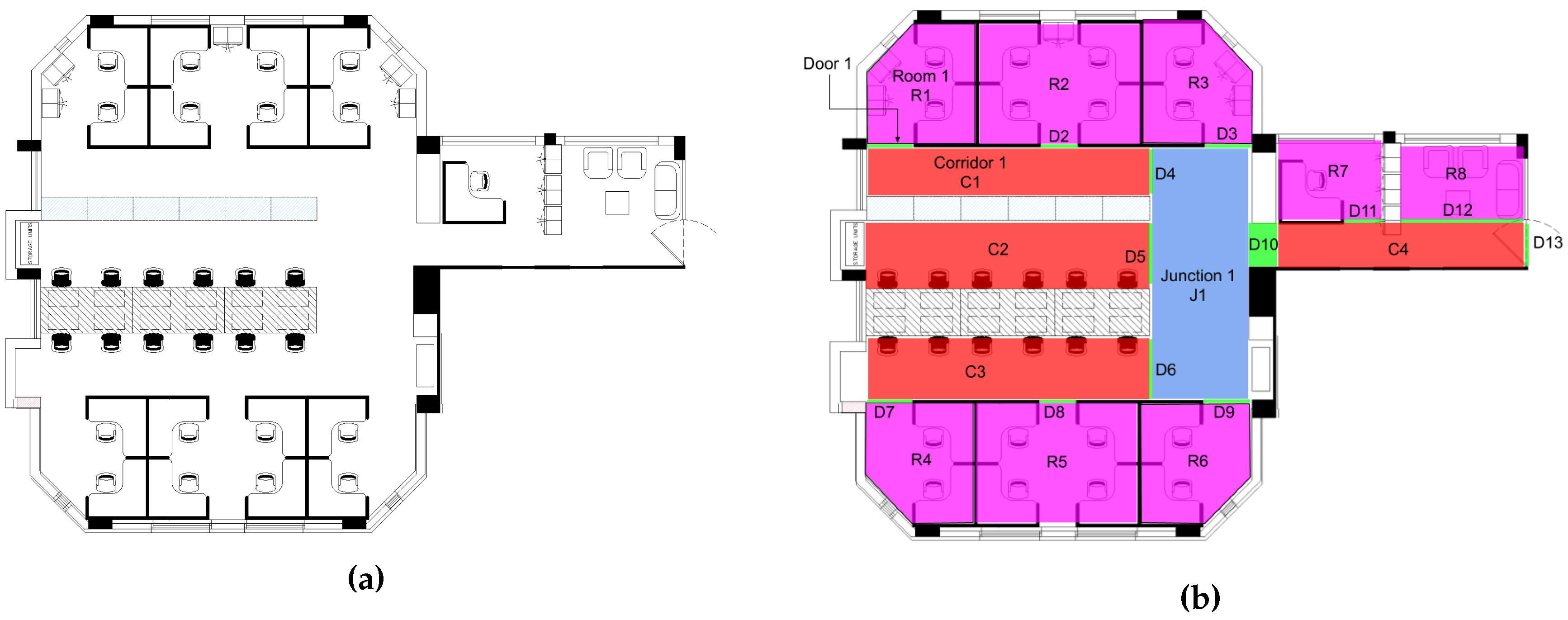
For example, a large lab or office space with a number of cubicles and seating areas, like in
Figure 7a, can be considered as comprising of multiple subspaces, each of which may be treated as individual classes of rooms, corridors and junctions as depicted in
Figure 7b. The attributes proposed for this class are:
4. Semantic Extension of IndoorGML
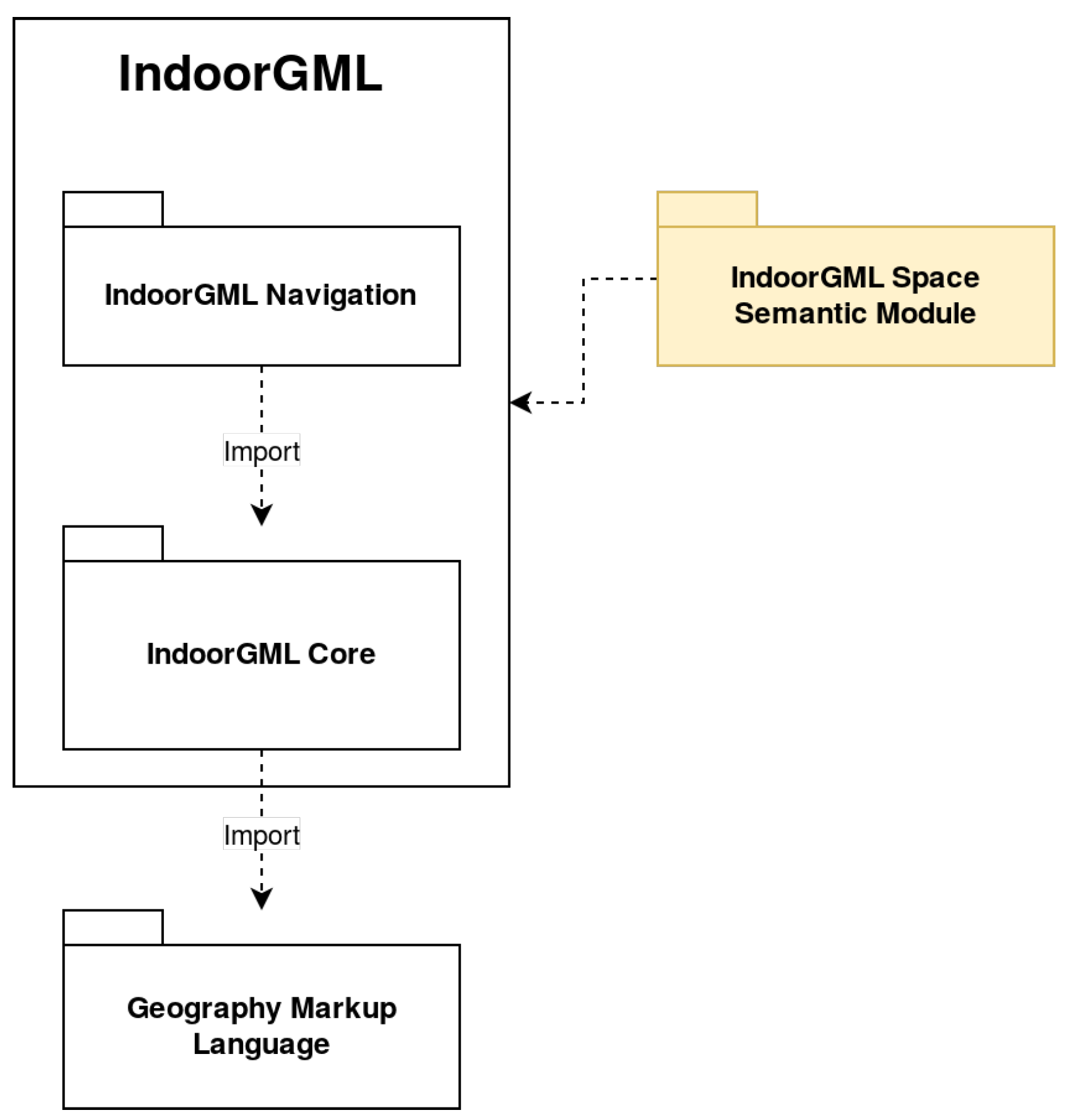
A careful perusal of IndoorGML data format indicates that it can capture the syntactic components of the proposed ontological framework but discounts the semantic part. Hence a semantic extension to IndoorGML is being proposed so that the defined indoor space semantic model is completely captured as part of the IndoorGML data standard.
The overview of the proposed module is shown in
Figure 8, as an extension to the IndoorGML Core module.
The primary features of the proposed module are
SemanticSpace and
SemanticOpening which corresponds to
CellSpace and
CellSpaceBoundary features of the IndoorGML core module.
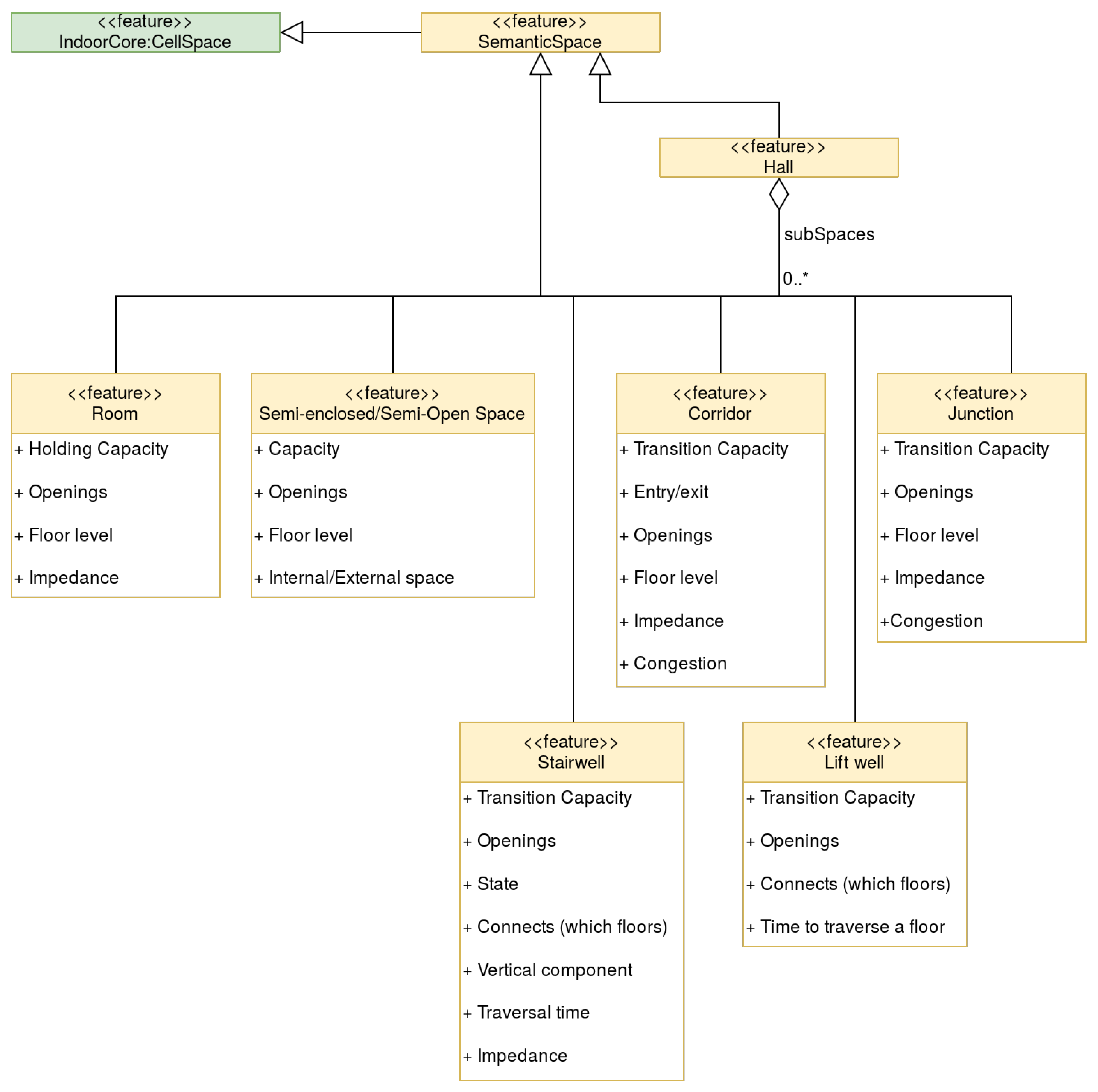
Figure 9 and
Figure 10 shows the UML class diagrams defining the
SemanticSpace and
SemanticOpening respectively with its subtypes and its reference to the
CellSpace and
CellSpaceBoundary features. The features inherited from the core module are represented in green colour and the proposed features are in yellow in the
Figure 9 and
Figure 10.
The
SemanticSpace feature has subtypes Room, Corridor, Junction, Semi-Open Space, Stairwell and Lift well with corresponding attributes as discussed in the previous section. The class Hall is also a type of
SemanticSpace but is an aggregation over other spaces as shown in the
Figure 9. The
SemanticSpace models the indoor space and stores it as one of its subtypes based on either the syntactic properties coming from the first component of ontology or directly using the information about the functional usage of the space from the second component of ontology. The geometric property of the space is derived from the corresponding
CellSpace features of the core module.
The
SemanticOpening corresponds to the definition of the openings (doors/windows) given in the previous section with the properties like capacity and state. Each
SemanticOpening connects two
SemanticSpace features to each other or to an external space, represented in the class diagram with multiplicity values of 2 and 1 respectively. This information is inherited from the core module as part of the
CellSpaceBoundary along with the geometry. The schema definition of the extension is detailed out in
Appendix A corresponding to the list of attributes associated with each feature.
5. Discussion and Conclusions
Indoor data with well defined properties and in a standard format is essential to avoid reconstruction and remodeling of data depending on the application of interest. This paper takes a holistic approach towards understanding and explaining an Indoor space environment based on the tenet of enclosures and provides a broad classification of Indoor space. Further, it proposes an ontological framework as a basis to develop and adopt the information, both readily available and of significance, into a more comprehensive indoor information model, from architectural drawings to the more recent techniques of data capture. It is hoped that the proposed Indoor Space Semantic model with its implementation as an extension of IndoorGML allows for both the semantic and geometric data to be captured and collated in one model. While the paper presents the semantic terminology that can be adopted for a mobility or evacuation path planning use case like capacity, impedance and so forth, the proposed framework provides for an approach to extend features as the application schema demands making the semantic model more interoperable. In the proposed extension of IndoorGML, while SemanticSpace features with its corresponding attributes provide for the capture of the related semantic information of the CellSpace, SemanticOpening provides the basis for derivation of connectivity and other network like features from the data. The latter makes the model more adaptable to various applications in a machine-readable way rather than the in-vogue hard-coded network elements that provide almost no scope for modification across multiple scenarios. Further work is needed in building a full-fledged case study of an indoor environment with the aim of fine-tuning any shortcomings and eventually presenting it to make a case for official adoption. Also, the interaction of our model with the external space would need to be detailed in a future work.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}