The purpose of emergency evacuation planning is to allocate a departure time and an escape path for each evacuee to ensure that all indoor occupants can safely and orderly escape to the safe area in the shortest time. When the number of evacuees is large, it is usually more effective to group them by the spatial proximity of their positions and then evacuate them in groups. A key issue during this procedure is congestion. To avoid the problem, two strategies are often adopted in case of emergency [
25]. One such strategy is staged evacuation, and the other is simultaneous evacuation. However, in the second case, it is hard for subsequent groups to wait to escape until all prior groups have fully passed. Someone would likely abandon waiting at the congestion and escape blindly, which increases the degree of congestion and the total escape time. Therefore, we choose the former for emergency escape planning.
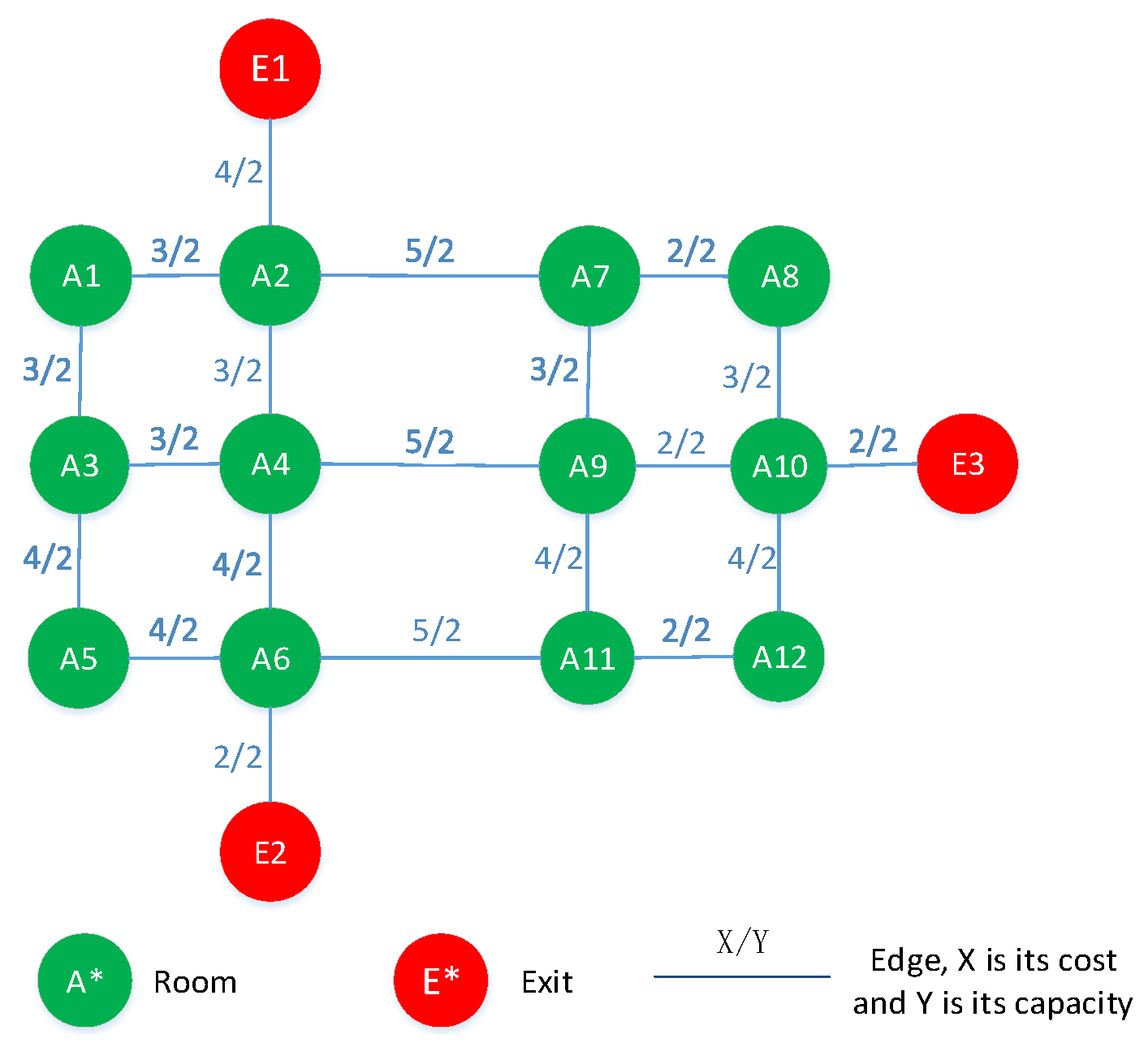
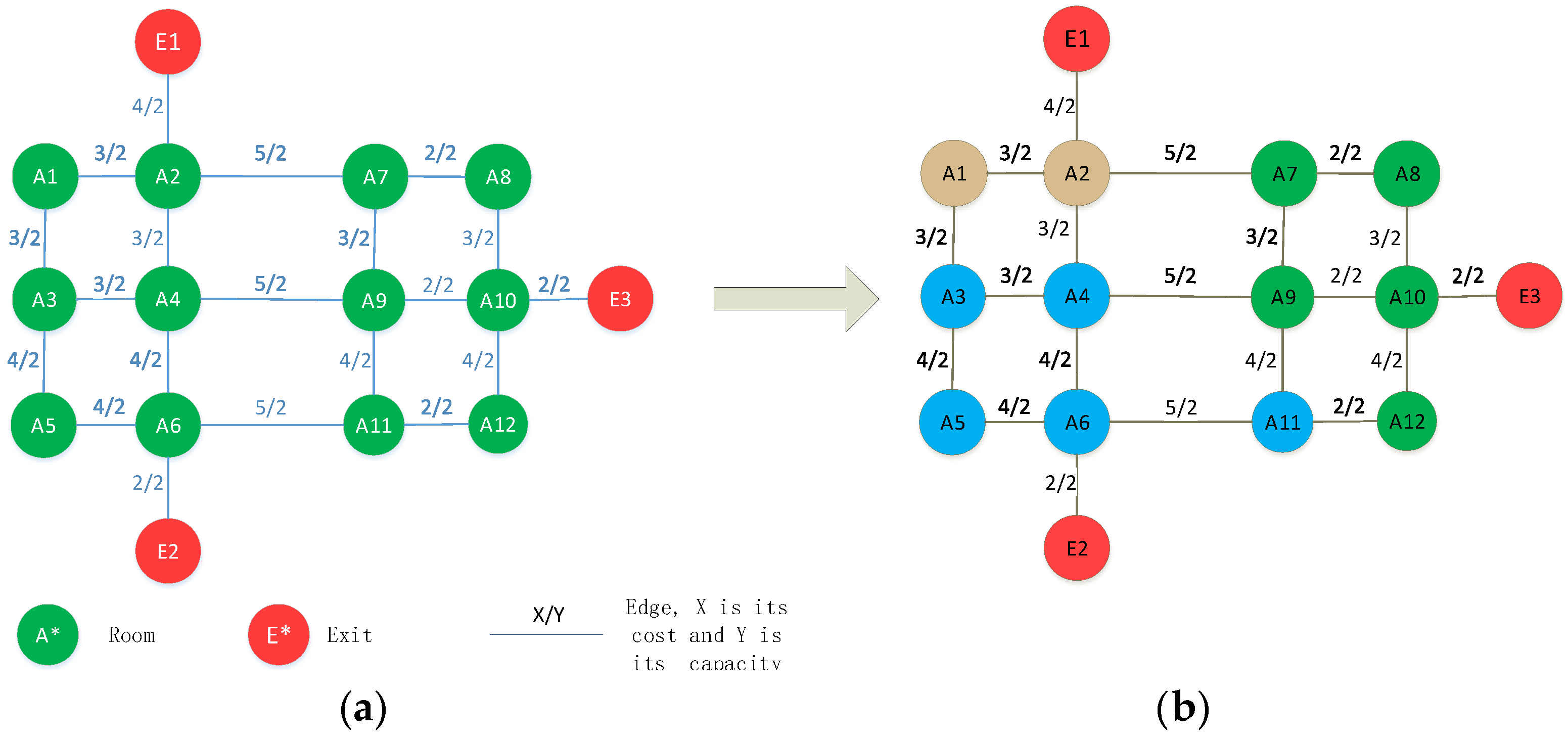
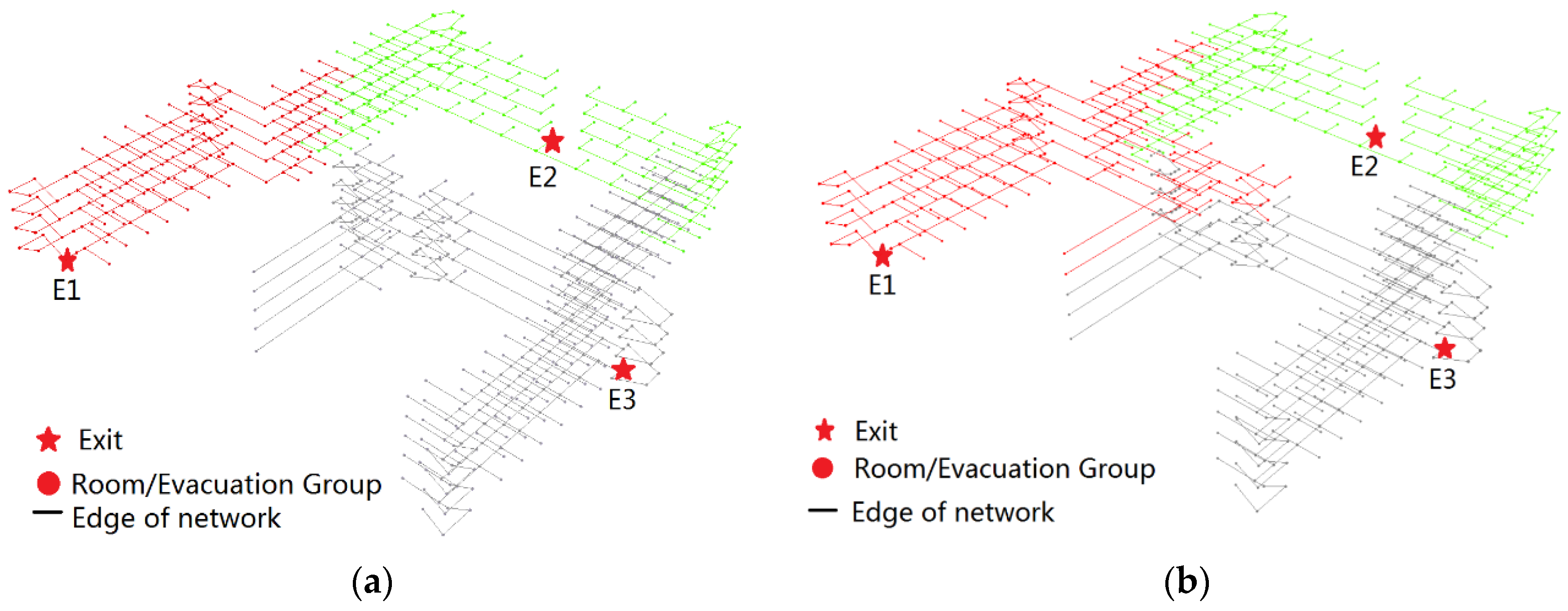
For an uncrowded multi-exit building, each safety exit has its corresponding service zone where evacuees can flee to the safety exit by their shortest paths [
32]. When an emergency occurs, indoor occupants can escape from the exit of the evacuation zone where they are located. Therefore, the emergency evacuation planning for a multi-exit indoor emergency can be easily transformed into that for a single-exit indoor emergency according to the service zones of building exits (
Figure 2). However, it must be noted that the goal of evacuation planning is to ensure the shortest overall evacuation time for all evacuees, rather than the shortest escape time for a single person. When the density of indoor occupants is very large or the distribution of them is non-uniform, the two factors should be taken into account when zoning. Only in this way can the number of evacuees in each evacuation zone be approximately equal, thereby making full use of all safety exits and getting the minimum of the total evacuation time.
Our proposed approach is mainly inspired by that in [
25] which is only suitable for the single-exit problem. But our approach can solve the multi-exit problem well, especially with crowded evacuees. Its key issues include how to transform the multi-exit problem into the single-exit problem to make the total evacuation time minimum and how to improve the approach in [
25] to get higher efficiency. Firstly, evacuees are grouped by their location proximity, then all groups are approximately equally classified into several evacuation zones by the improved Dijkstra algorithm according to the load of each exit. Secondly, all evacuation groups in the same zone are sorted by their shortest path length, then the time window of each evacuation group occupying the safe exit is calculated in turn. In the case of congestion at the safe exit, the departure time of each evacuation group is delayed in its arrival order.
4.1. Staged Evacuation for Single-Exit Network
In the case of congestion, the evacuation process involves many factors, such as the weight and capacity of route network, the total number and total evacuation time of evacuees, the time when an evacuation order is issued, the waiting time, departure time and escape speed of each evacuee, etc. To describe and analyze the evacuation conveniently in theory, related variables are defined below.
n: the number of evacuation groups.
t0: the earliest departure instant, that is, the time when an evacuation order is issued.
: the time consumed by the escape group i from the origin to the safety exit E along the escape path.
: the time consumed by the queue of group i to completely pass through a point such as E on the route network.
: the delay of the departure time of the escape group i.
: the time interval between the group i and its prior group along the route.
V: the escape speed of escape groups.
T: the total evacuation time of all escape groups that is the time from t0 to the instant when the last evacuation group has passed through the emergency exit.
It is assumed that the escape speed V of each group is the same and the evacuation network has only one safety exit. At the same time, the staged evacuation process has four assumptions:
Each edge of the evacuation network has the same capacity, and when a node of the network is occupied by a group, other escape groups cannot pass through the node.
The delay time between two adjacent groups is to ensure that their time windows don’t overlap or separate.
During the staged escape procedure, each group escapes along the shortest path to the exit.
The evacuation network is an undirected graph in which it will take the same cost to go or come along the same edge.
In the process of staged evacuation, each group arrives at the safety exit along their shortest path without any congestion. Then each group successively passes through the exit to complete the evacuation [
25]. Accordingly, the total evacuation time of each group may be divided into three parts that include
,
and
. The total evacuation time
T is equal to the time when the safety exit is occupied in the whole evacuation process, therefore
T can be expressed as follows:
In the staged evacuation planning, the first key work is to determine the evacuation order of each evacuation group. We deeply analyzed the operation of the staged evacuation process and obtained Theorem 1. It is the basis of our proposed approach.
Theorem 1. In order to obtain the shortest total evacuation time, all escape groups should escape in stages according to their distance from the emergency exit. The group near the exit has priority to depart and that far from the exit will be delayed if there are conflicts between their time windows.
Proof of Theorem 1. Assuming that group Gi and group Gi + 1 need to be evacuated and only one of them is allowed to pass in the process of evacuation for the limits of path and node capacity. That is, when one group is passing through exit E, other groups can’t pass through it. Then, several situations may occur at exit E (or path intersection) when the two groups are evacuated.
Situation 1. The two groups depart at the same time and arrive at the emergency exit successively without congestion.
As shown in
Figure 3, assuming that
Gi arrives at the emergency exit
E before
Gi + 1, the condition for no congestion at the exit is as follows:
At this time,
Gi + 1 need not delay its departure time,
. Their total evacuation time passing through the exit
E successively can be expressed as follows:
Situation 2. Two groups depart at the same time and arrive at the exit at the same time, causing congestion
Group
Gi and group
Gi + 1 reach the emergency exit at the same time, namely
, as shown in
Figure 4. In order to avoid the congestion of
Gi and
Gi + 1 at the emergency exit, one of them can start to escape immediately while the other must delay its departure time and wait at origin. To find the shortest total evacuation time, the delay time should ensure that the two groups pass through the emergency exit successively, and at the same time there is no time interval when they pass through the exit. There are two evacuation solutions to be discussed:
In case of emergency,
Gi departs immediately and
Gi + 1 delays its departure time. For
, their total evacuation time is as follows
In case of emergency,
Gi + 1 departs immediately and
Gi delays its departure time. For
, their total evacuation time is as follows:
because
, any of them can be delayed reasonably to avoid congestion when they arrive at the exit at the same time.
Situation 3. Two groups set out at the same time and arrive at the exit successively, causing congestion.
Assuming that
Gi reaches
E before
Gi + 1, and
Gi + 1 reaches
E when
Gi does not pass through the exit completely, as shown in
Figure 5, the conditions for congestion of the two groups are
and
. To find the shortest total evacuation time, the delay time should ensure that the two groups pass through the emergency exit successively, and at the same time there is no time interval when they pass through the exit. There are two evacuation solutions to be discussed:
In case of emergency,
Gi departs immediately and
Gi + 1 delays its departure time. For
, their total evacuation time is as follows
In case of emergency,
Gi + 1 departs immediately and
Gi delays its departure time. For
, their total evacuation time is as follows:
because
,
. Therefore, when two evacuation groups are congested, the group close to the emergency exit E should first start to escape.
In conclusion, in order to minimize the total evacuation time, that is, to ensure the full use of the emergency exit, the group close to the emergency exit should give priority to escape. □
In the staged evacuation planning, the second key work is to calculate the delayed departure time of each evacuation group. Li et al. used the time extended network to calculate the delay time of each group [
25]. The method first calculates the time window of each node on the evacuation path occupied by each escape group, and then calculates the latency of each group’s departure time by the arrival sequence and the overlay of these time windows. The iterative process leads to redundant calculations in the algorithm, which results in its low efficiency. To avoid the problem, we comprehensively analyzed the operation of the staged evacuation process, and found Theorem 2 that simplifies the calculation process of the staged evacuation planning.
Theorem 2. When evacuation groups are congested, the result of calculating their delayed departure times at the congested node is the same as that at the emergency exit.
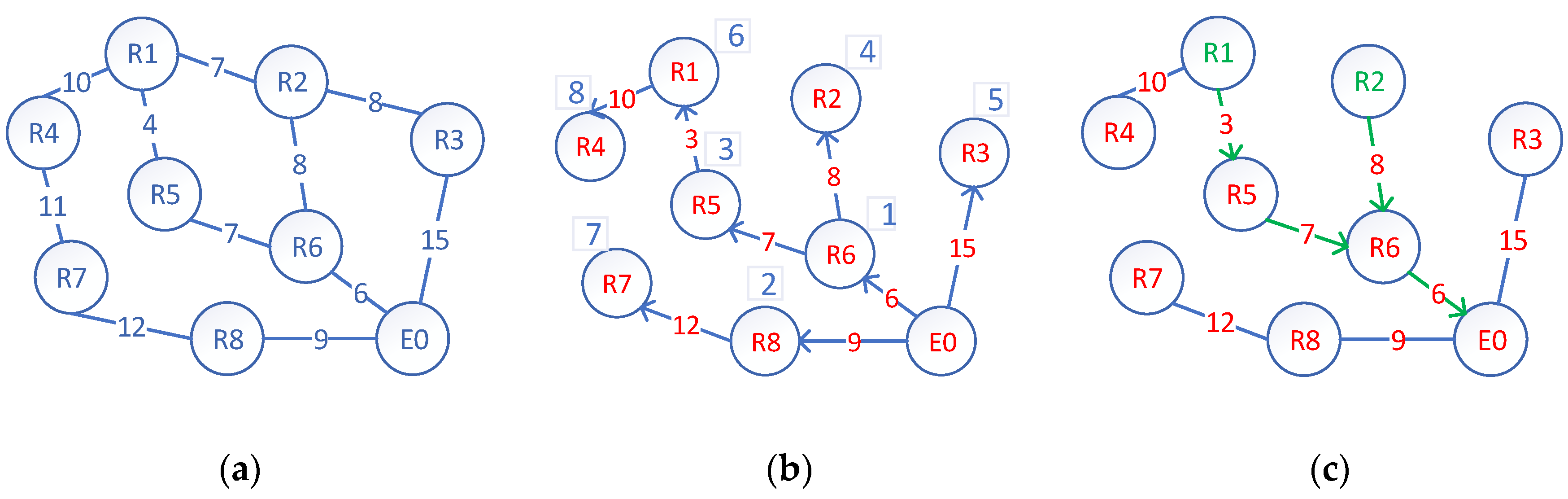
Proof of Theorem 2. According to Assumptions 3 and 4, in the evacuation network, the shortest paths from the exit to other nodes are equivalent to the shortest paths from other nodes to the exit. Therefore, the shortest paths of all groups can be obtained through Dijkstra algorithm to calculate the shortest paths from the exit to the nodes where each group is located. According to the operation principle of Dijkstra algorithm, the shortest path from the exit to each node will be obtained in the order of the shortest path length from small to large, so as to form the shortest path tree.
Figure 6a is an indoor evacuation network. Ri represents a room and
E0 represents an exit. When Dijkstra algorithm is called, it will find in turn the shortest paths (
P1(
E0-R6),
P2(
E0-R8),
P3(
E0-R6-R5),
P4(
E0-R6-R2),
P5(
E0-R3),
P6(
E0-R6-R5-R1),
P7(
E0-R8-R7),
P8(
E0-R6-R5-R1-R4)) from
E0 to
R6,
R8,
R5,
R2,
R3,
R1,
R7 and
R4 respectively. The route length of these paths will increase in turn, which are 6, 9, 13, 14, 15, 16, 21, 26. These paths compose a shortest path tree with
E0 as the root node. The tree is shown in
Figure 6b, where the number marked on each node represents the order of obtaining its shortest path when running Dijkstra algorithm. When the shortest path from
E0 to each room node is calculated, the shortest path from each room to
E0 can be obtained by flipping the path direction.
Figure 6c illustrates the two shortest paths. One is the path from R1 to the emergency exit
E0 and the other is that from
R2 to
E0. They meet each other at node
R6 and overlap from
R6 to
E0. □
We can see from the execution process of Dijkstra algorithm that the shortest path of any node whose shortest path isn’t determined will be obtained by the determined shortest paths. Therefore, once the evacuation paths of any two evacuation groups has an intersection, the two paths will be completely overlapped from the intersection to the exit, as shown in
Figure 6c. In the process of evacuation, because the two groups have the same escape speed, their travel time after passing the intersection (that is, from the intersection to the emergency exit) is also equal. As a result, it is equivalent to calculate the delay time at the exit or intersection when the two groups are congested at the intersection. Assume that the evacuation speed
,
G1 represents the evacuation group starting from
R1,
;
G2 represents the evacuation group starting from
R2,
;
is the evacuation time of
G1 from
R1 to
R6;
is the evacuation time of
G2 from
R2 to
R6;
is the evacuation time of
G1 from
R1 to
E0;
is the evacuation time of
G2 from
R2 to
E0. Then, the delay time of
G1 at the intersection
, and the delay time of
G1 at the exit
.
, so
.
4.2. Proposed Algorithm for Multi-Exit Network
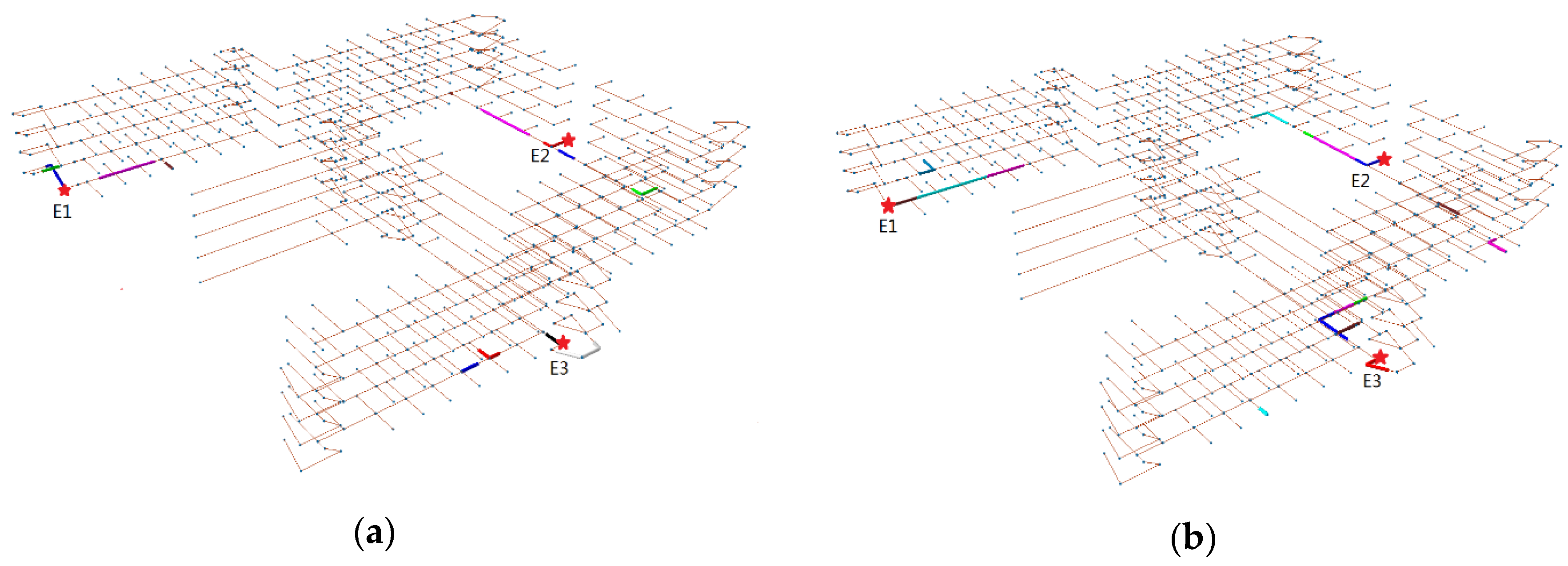
Based on the discussion above, we propose a partitioned and staged evacuation planning (PSEP) algorithm applied to multi-exit buildings. It should be noted about the algorithm that: a) evacuation planning is processed in groups to reduce the complexity of processing; b) for all groups in each evacuation zone, the staged evacuation is implemented; c) in order to minimize the total evacuation time, any two congested groups must successively pass through the emergency exit when delaying their departure time in each zone.
4.2.1. Algorithm Description
The whole algorithm is divided into two procedures. The first procedure will allocate an optimal exit to each evacuation group (all evacuation groups passing through the same exit belong to the same evacuation zone), and the second will compute the departure time of each evacuation group in the same zone. Their pseudo code is as follows.
Input: indoor road network model, exits, escape speed (V), group size (uniform or random) and the number of groups (n).
Output: Total evacuation time (T), the departure time () and the evacuation path for each group.
Notes about Procedure 1: Line 5 adds all evacuation groups in the network into an array N. Line 6 adds all exits in the network into an array E. Line 7 initializes the number of evacuees evacuated by each exit to 0. While N is not empty, namely there are any evacuation groups in N that aren’t allocated to any exits, Lines 9 to14 compare the number of evacuees passing through each exit to find the exit minE with the fewest evacuees. Lines 15 to 16 take minE as the starting point, run Dijkstra algorithm to expand a new shortest path. The group located at the end node of the new path is minG. Then let minG evacuate through minE. Next, update the number of evacuees passing through minE (Line 19) and remove minG from N (Line 20). Thus, an evacuation group is allocated to one exit by one loop. When all evacuation groups are allocated to an exit (that is, until N is empty), the loop ends.
Procedure 1 (Allocate an optimal exit to each evacuation group):
| 1 Integer ne //ne represents the number of exits in the network. |
| 2 Array N[n] //N is used to store all evacuation groups. |
| 3 Array E[ne] //E is used to store all safety exits. |
| 4 Array G[ne] //G is used to store the current number of evacuees at each exit. |
| 5 Add all evacuation groups into N |
| 6 Add all evacuation exits into E |
| 7 Initialize all elements of G to 0 |
| 8 While N is not empty do |
| 9 Let minE = 1 //minE is a variable used to record the index of the exit with the minimum evacuees. |
| 10 For e = 2 to ne //e is a local loop variable |
| 11 If G[e] < G[minE], then |
| 12 Let minE = e |
| 13 End if |
| 14 End for |
| 15 Take minE as the starting point |
| 16 Run Dijkstra algorithm to expand a new shortest path//referring to Figure 6a |
| 17 Let minG = N[i] //N[i] is the group located at the end node of the new path |
| 18 Let minG evacuate passing through minE |
| 19 Update the number of evacuees passing through minE |
| 20 Remove minG from N |
| 21 End while |
In brief, during the implementation of Procedure 1, there is a Dijkstra algorithm at each exit, but only the Dijkstra algorithm on the exit with the least number of evacuees runs at each time, and the Dijkstra algorithm only expands one shortest path at a time (that is, to find an evacuation group). Then the number of evacuees allocated to each evacuation exit is compared with each other to determine which exit to run Dijkstra algorithm until all evacuation groups are allocated.
Notes about Procedure 2: Lines 3 adds all evacuation groups in the network into an array N with the array length of n. Line 4 sorts all evacuation groups in N according to their shortest route length. Then an outer loop (Line 5) is used to process each zone, namely, each exit. There are two inner loops in the outer loop. The first inner loop (Lines 6 to 10) is used to extract all each evacuation groups passing through the same exit from N, then adds them into M by order. Line 11 makes group 1 in M depart immediately once an emergency occurs, and a = 1, where a is the evacuation sequence number of the first group in each evacuation combination that successively passes through the emergency exit. Then the second inner loop (Lines 12 to 17) is executed to compute the departure time of Gi in M, where i is from 2 to m that is the number of groups in the same zone. The departure time of Gi is calculated as follows: . If , the delayed time of Gi is . Otherwise, Gi evacuates immediately without any delay once an emergency occurs, and let . Execute the inner loop until all evacuation groups in M get their departure time, then return to Line 5. When the outer loop finishes and the procedure ends.
Procedure 2 (Calculate the departure time of each group in each zone):
| 1 Array N[n] //N is used to store all evacuation groups |
| 2 Array M[n] //M is used to record the groups assigned to the same exit |
| 3 Add all evacuation groups into N |
| 4 Sort N By their route length |
| 5 For e = 1 to ne //to process each zone by the loop |
| 6 For j = 1 to n //find all groups that passes through Exit E[e] by the loop |
| 7 If N[j] passes through E[e] then |
| 8 Add N[j] into M |
| 9 End if |
| 10 End for |
| 11 Let , a = 1 |
| 12 For i = 2 to m //to compute the departure time of all groups passing through Exit E[e] by the loop |
| 13 |
| 14 If , then |
| 15 , a = i |
| 16 End if |
| 17 End for |
| 18 End for |
4.2.2. Time Complexity Analysis
In Procedure 1, the while loop runs n times, and the for loop runs ne times. In addition, when running Dijkstra algorithm to expand each node, the path length of all nodes in the network needs to compare n times. So, the time complexity of Procedure 1 is . For , the final time complexity is .
In Procedure 2, the outer for loop runs ne times, the first inner for loop runs n times, the second for loop runs m times. So, the time complexity of Procedure 2 is . For , the final time complexity is . Of course, this process also includes a sorting process with the time complexity or .
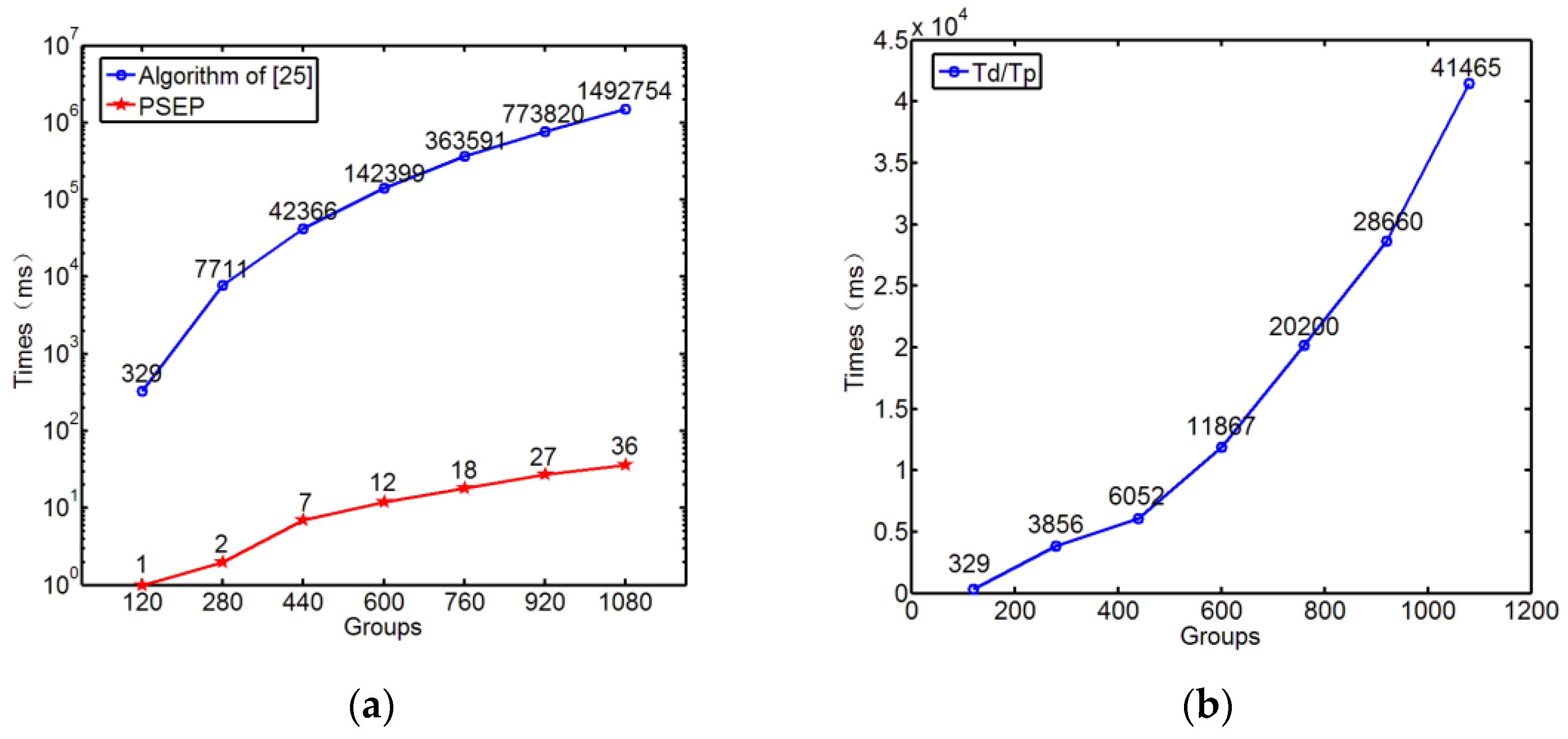
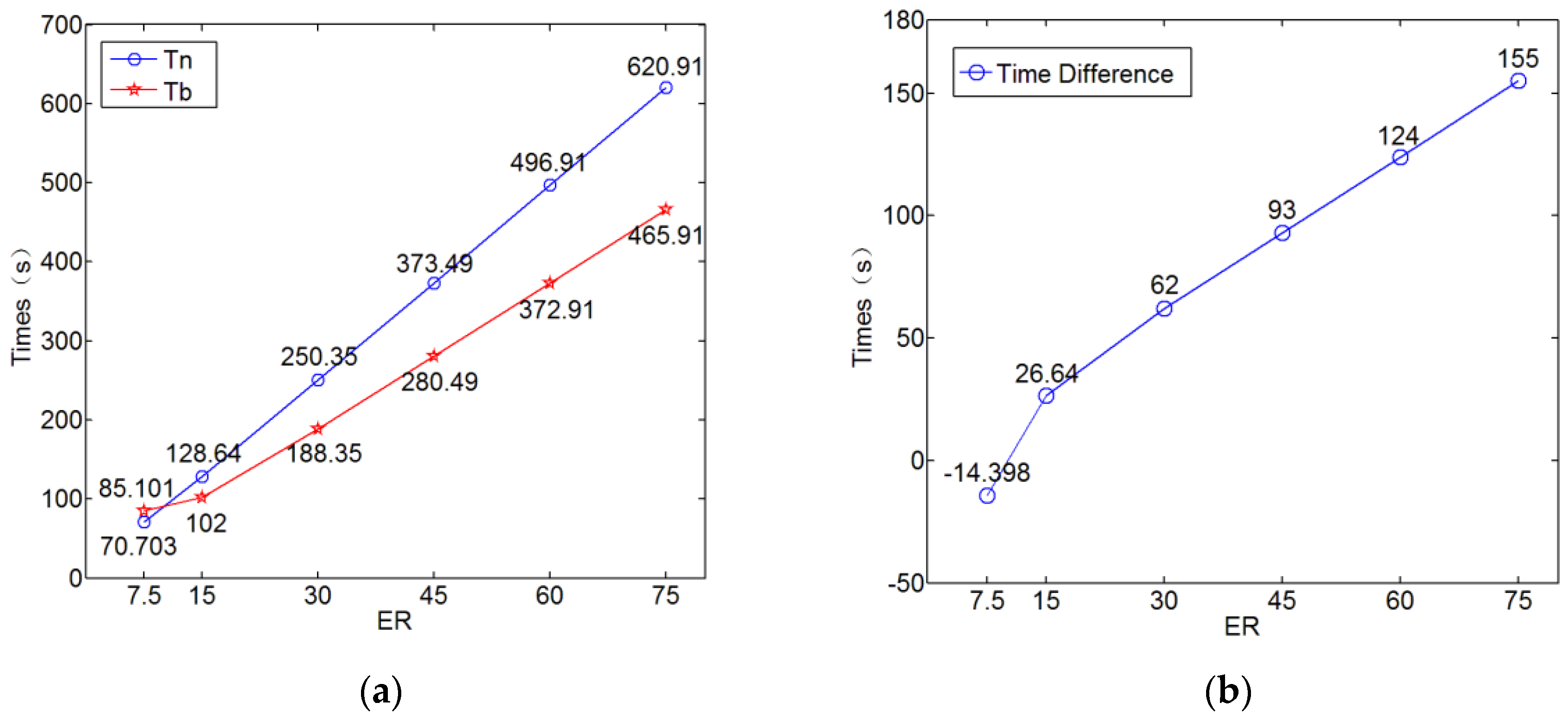
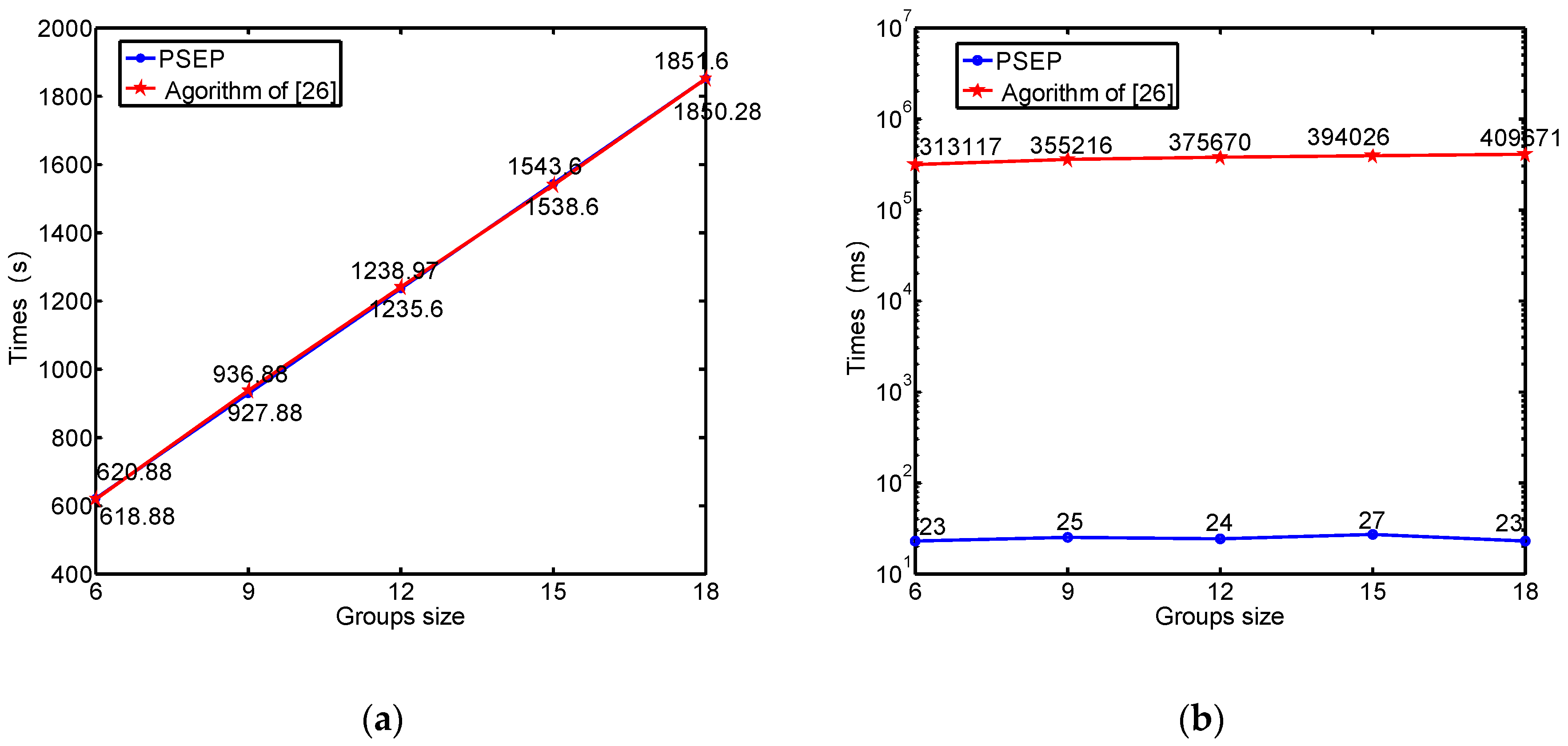
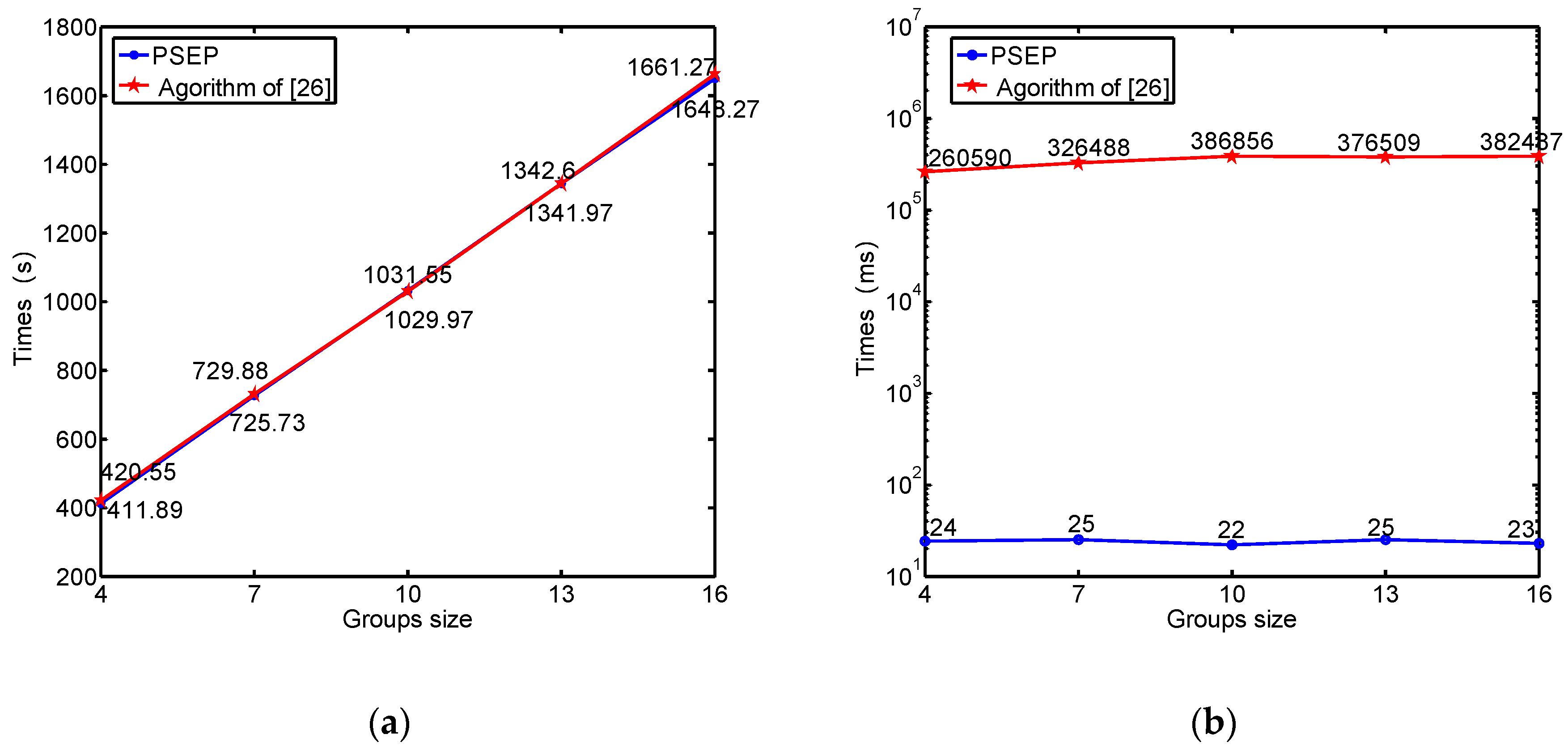
Once the PSEP algorithm completes partition, each zone is equivalent to a single-exit evacuation network. For a zone, the time complexity of calculating the departure time of each evacuation group is
, while the time complexity of completing the calculation by the algorithm in [
25] is
, where
m is the number of groups in the zone,
k is the number of arcs of all evacuation path and
is the arithmetic mean of
k.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}