ELiT, Multifunctional Web-Software for Feature Extraction from 3D LiDAR Point Clouds



Abstract
:1. Introduction: Initialization of 3D City Models in Urban Studies through Lidar Data Processing
1.1. Common Issues
1.2. Automated Extraction of Building Models and DEM Generation
1.3. Some AFE and DEM Creation Problematic Issues
2. Approach and Methods: Urban Topography and Building Model Extraction from Airborne 3D LiDAR Point Clouds
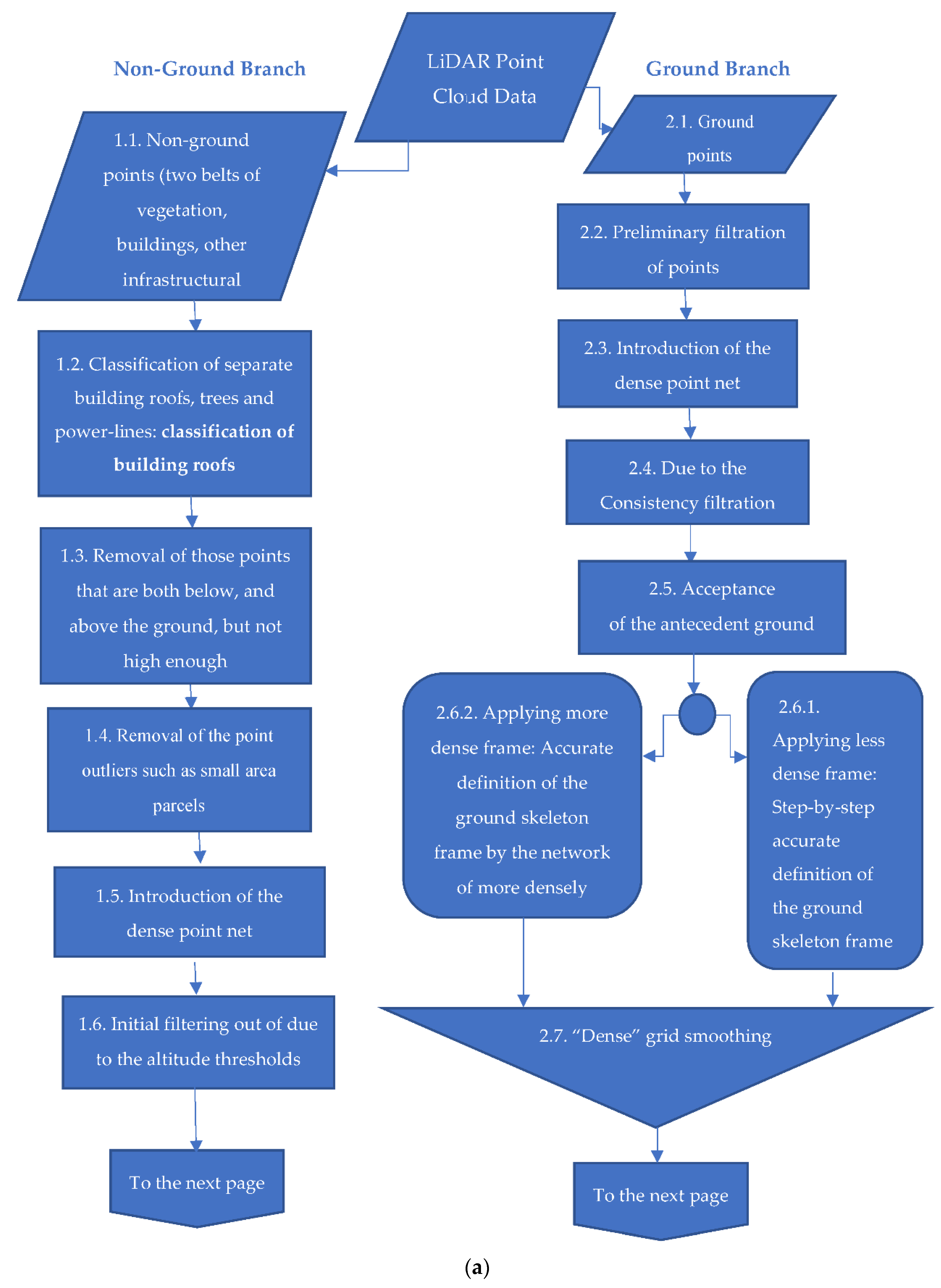
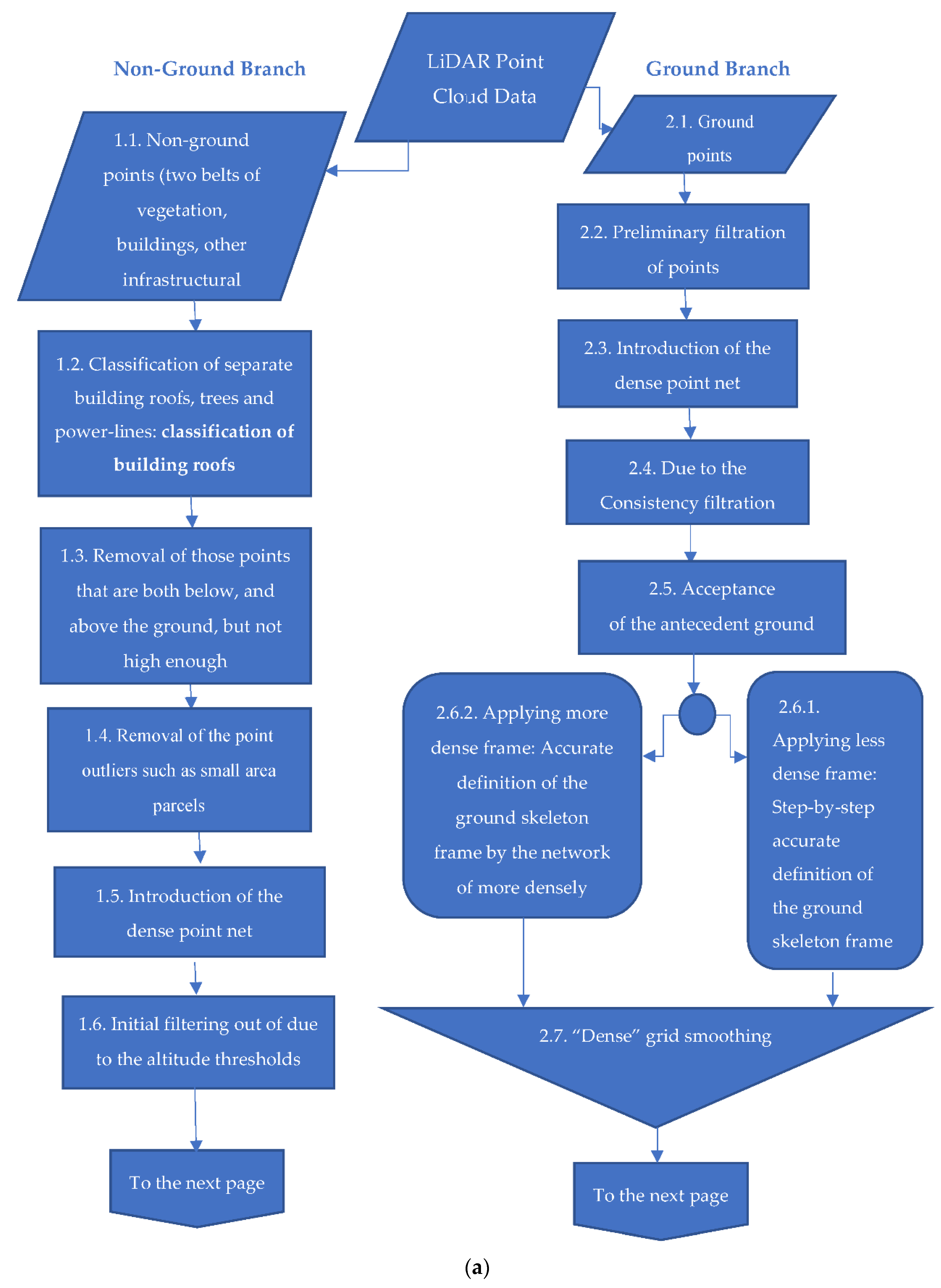
2.1. High Polyhedral Modeling and Two-Branched DEM Generation/AFE Algorithmic Solution
2.2. Ground (DEM-G) Classifying Algorithmic Branch
- Ground points (block 2.1 of the Ground branch—Figure 1):It implies an input of that LiDAR point cloud for processing, which contains some ground points by default;
- Preliminary filtration of points (block 2.2 of the Ground branch):The ground classifying algorithms are normally used for analysis of the point mutual location, thus either their semi-coincidence, or complete coincidence would negatively impact classification results. Therefore, point semi-coincidence (or duplication) may distort a point array drastically, and one of two points duplicated have to be marked as a “noise” point, while a set of such points—“doubles" may form together an outlier.
- Introduction of the dense net of the points (block 2.3):It should be taken by default, that all points lying on the topographic surface are lower, than any other points related to those features, for which the topography is the base. Thus, it is necessary for ground classifying to keep the lowest points only, and these points have to be bound to relatively small ground parcels. Normally, even upon the smallest lidar point density (1–2 points per square meter) we have to select the lowest point within a parcel of 2 m × 2 m, and using the sliding window method.
- Due to the Consistency (Point Density) Filtration (block 2.4):All the points selected by now within both algorithmic branches (refer to Figure 1a,b) belong to reactively smooth, un-transparent features (either to ground, or to building roofs). They have almost uniform distribution of their density along the whole data extent. That allows to build a triangulated irregular 2-D network (TIN) throughout all these points. All those edges, that are too long, or that have some pitch according to the normal to the topographic surface should be removed from this TIN. This procedure determines and excludes those small abnormal topographic parcels (topographic sinks and gaps, shaft wells, sharp small peaks), which break the network smoothness with respect to this network unit height distribution;
- Acceptance of the antecedent (reference) ground points (block 2.5):Those points left after block 2.4 completion are named as the reference points. These points should not expose sharp sinks, thus each of them should initiate a starting node of a newly smoothed surface construction, and this surface can be large enough. The antecedent ground points can be chosen by default in the following way. The common data extent should be partitioned for the parcels large enough to include ground points, but each surface area raised above neighboring parcels (“a hill”) and delineated by surface breaks, should completely include such parcel, which, “is large enough”. All neighboring parcels mentioned are located for a half of each size shift one relatively to another; thus, they intersect one another for a half of its area. The key issue is that there should not be parcels crossed by the common area spatial extent edge upon a whole surface partition. Such parcels should be ignored, since the point presence within these areas cannot be taken by default. Normally, the lowest point has to be selected within the all point parcels obtained upon former algorithmic steps. This point is selected after the removal of 0.3% of lower points that considered as random noises/fluctuations. The parcel size of 30–50 m along each its edge allows to classify efficiently even a sharply crossed topographic area, upon a condition that there are no big buildings within it. In case, when large building constructions are present (approximately with the roof size of 50 m × 50 m and more), the parcel size should be enlarged up to a size of the biggest building so that to avoid an evident spatial contradiction. We have to take into account that those parcels, which are either with broken terrain, or even with crossed topographic surface ones, as well as those ones with buildings present and of small area, may not be classified as ground points. The total length of each whole data extent edge for any side of a parcel as a partitioning result should at least trice exceeds a length of the side of this parcel, where antecedent ground points are located. Otherwise, the points selected may be localized within a small area only, and this area cannot be the base for a whole local topography construction, while these points cannot be the reference points.The next algorithmic block (block 2.6) is the only one which branches out for “two sub-blocks”.
- Step-by-step Accurate Definition of the Ground Skeleton Frame (block 2.6.1, the right sub-block of the sixth block—Figure 1):Thus, a TIN is constructed through the reference points, and its facets characterize the topographic slope on some local parcel. For each point selected upon the third algorithmic block the nearest facet should be found, while z-coordinate of this facet is not taken into account. The distance–height between the point and the facet should be measured, as well as an elevation of this point above the highest point of this facet. This distance–height is negative if the point is below the facet. The height of the highest point, which belongs to this facet, is measured too. The lowest point among all those ones, which belong to this facet, is selected. All selected points, which become the reference ones, should not be higher above the facet surface more than for a certain value, and should not be more distant from the facet, than for a certain value. Upon these measuring procedures both the point distance to the facet, and its height above the surface of the facet should be accepted with equal weighting coefficient of 0.5. Such acceptance allows smoothing drastic slopes of the reference surface obtained from the reference points (refer to block 2.5), on which these slopes tend to appear along this surface edges. The points selected are consequently added to the reference TIN, and the next iteration is completed until then, when all points are being successfully gathered. The total number of iterations should not exceed some threshold value defined. Those points that are too close to the points already added should be ignored. Thus, we could avoid the topographic breaks in an approximating TIN. In this way, the ground surface built through the almost lowest ground points is defined more precisely by the lowest points newly added step by step, while the approximating procedure can be completed through the smooth topographic elevations, but it cannot be—through the topographic breaks and walls.
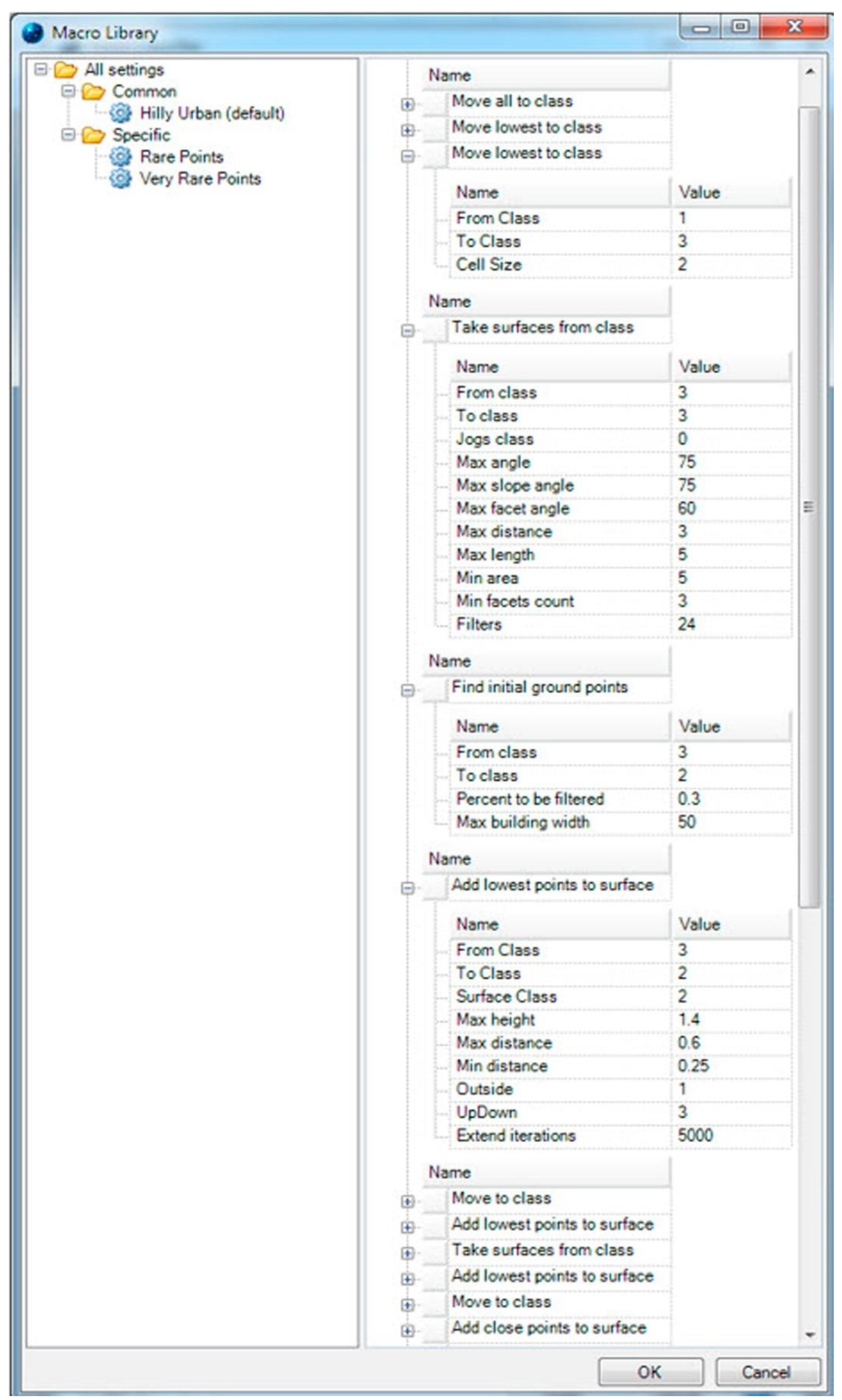
- Accurate Definition of the Ground Skeleton Frame by the Network of More Densely Located Points (block 2.6.2, the left sub-block of block 2.6):Following parameters for “2.2–2.6 ground” classifying algorithmic blocks should be entered for corresponding processing into the relevant Macro Library dialog (MLD) with further implementation in our desktop application ELiTCore—Figure 2.After the completed topographic skeleton-frame of the ground surface has been built as a continuous one on the point network of low density, this frame can be made to become even denser by applying the same method of a sliding window of 0.5 m × 0.5 m for making a network denser. The same algorithm, that has been applied in the third algorithmic block, is employed once again, if the point density value is acceptable for provision of this procedure. Since our accepted size of the sliding window as 2 m × 2 m contains 16 cells of 0.5 m × 0.5 m, a total number of algorithmic iterations is not too big in this case.
- “Dense” grid smoothing (block 2.7):Despite expectations that continuous topographic skeleton-frame might be built precisely and accurately up till now, it may include some abnormal topographic deviations (which are, as a rule, of lower altitude, than necessary), because they may not be filtered out in the fourth block. A procedure of “dense” grid smoothing for that topographic skeleton-frame, which has been already obtained as a compacted (“highly dense”) one, allows to eliminate these deviations in the same manner, as it has been done in block 2.3.
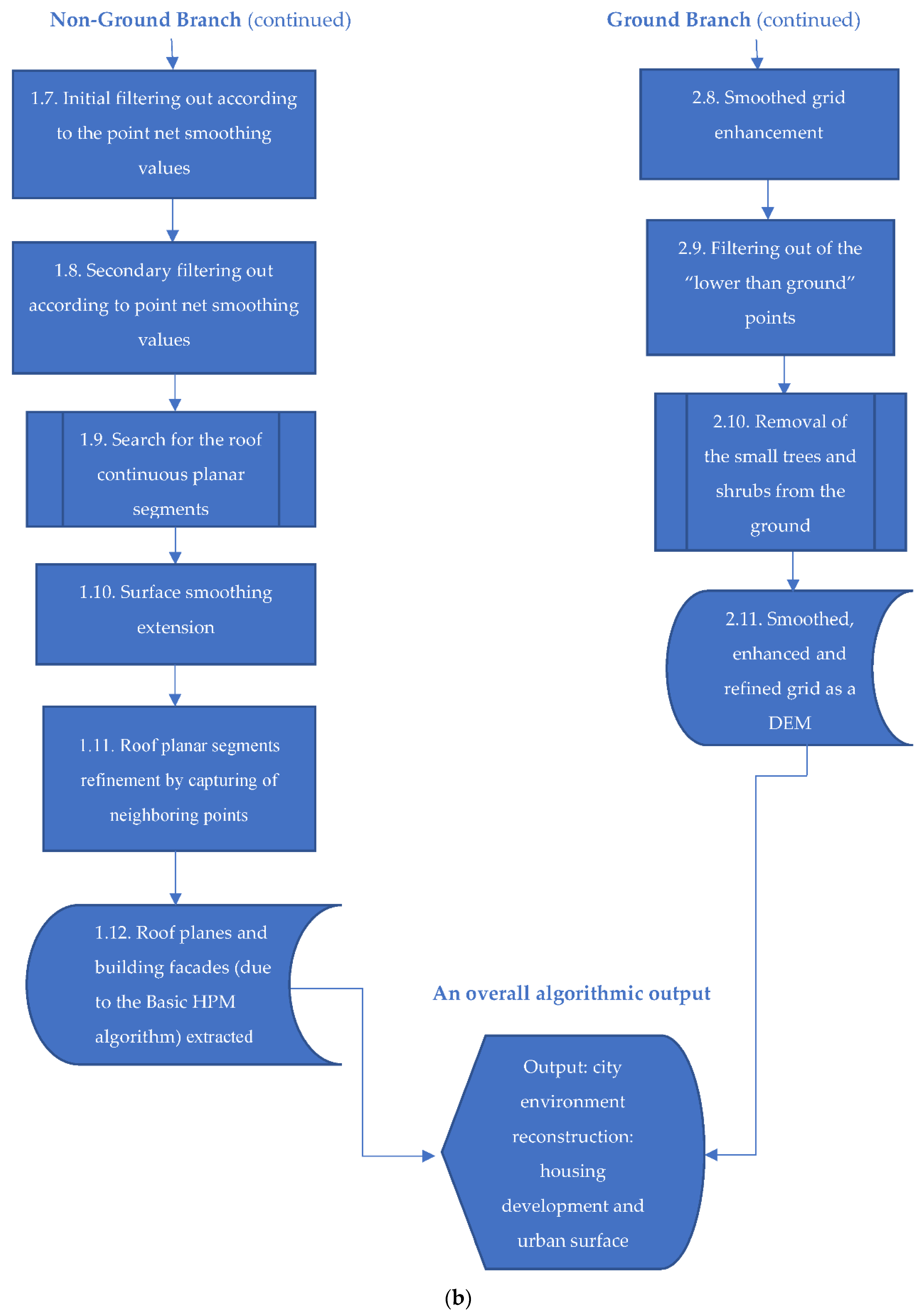
- Smoothed grid enhancement (block 2.8 of the Ground branch—Figure 1):After the smoothed grid has been obtained with the corresponding topographic skeleton-frame, this frame should be enhanced by the neighboring points. These points are both those ones from the network of the lowest points of that sliding window 0.5 m × 0.5 m cell mentioned, and all other points, which lie beyond this window edge, if their density is satisfactory.Nonetheless, before immediate enhancement of an obtained grid, it may be necessary either to build through the topographic frame mentioned above some another interpolated grid, or apply exactly this direct TIN of the skeleton-frame for other features’ classification, if this classification requires some additional information. It may be a case, when precise classification requires some knowledge about feature allocation in relation to the earth surface. If it is not provided, the further processing may appear to be a cumbersome one.
- Filtering out of the “lower than ground” points (block 2.9):By default, all points that are lower, than those ones classified as “the ground”, should be defined as the “lower noise” (topographic sinks, shaft wells, other negative mirroring of laser sensing).Customized input parameters for “2.7–2.9 ground” classifying algorithmic blocks should be set up and entered for corresponding processing into the relevant MLD in the ELiTCore software, just as it has been done for blocks 2.2–2.6 (Figure 2).
- Removal of the small trees and shrubs from the ground (block 2.10):This one before last algorithmic block of the Ground branch finally refines the topographic surface modeled through blocks 1–9. Thus, the next derivative results are conclusively obtained in the last block of this algorithmic brunch.
- Smoothed, enhanced, and refined grid as a DEM (block 2.11):In this way an “urban DEM” (urban terrain) is created, which we understand as a synonym of a digital terrain model, which represents the bare earth ground with uniformly spaced z-values within any “urban area”.
2.3. Building Extraction (BE) Classifying Algorithmic Branch
- Non-ground Points (two belts of vegetation, buildings, other infrastructural features) (block 1.1 of the Non-Ground branch—Figure 1):It implies an input of that Lidar point cloud for processing, which contains at least some non-ground points by default;
- Classification of separate building roofs, trees, and power lines: classification of building roofs (block 1.2 of the Non-Ground branch):
- Removal of those points that are both below, and not high enough above the ground (block 1.3):It is understandable, that the first step to remove “abnormal” points would be a step to eliminate points, that are below some height threshold value. The topographic altitude of 1.5–2 m cannot be accepted to be a reliable threshold value, which would indicate the building roofs. These points should be removed.
- Removal of the point outliers such as small area parcels (block 1.4) and initial filtering out of:Spatially isolated sets of points (“outliers”) that possess relatively small areas (e.g., up to 15 m2) should be eliminated also, since they do not allow to identify definitely a building in comparison, for example, with a big truck.At this point of the Non-Ground branch some customized input parameters for “1.2–1.4 non-ground” classifying algorithmic blocks should be set up and be input for processing into the relevant MLD, just as it has been illustrated for blocks 2.2–2.6 above (Figure 2).
- Introduction of the dense point net (block 1.5):In the majority of cases the roof surface is not a transparent one. Therefore, most of the roofs of low-rise buildings may belong to the lowest points among all non-ground points delineated within some small parcel selected in a point cloud, while the roofs of high-rise buildings may belong to the highest non-ground points. Those roofs that are too transparent for a LiDAR beam may not be found at all. The selection of each lowest point for a given parcel applying a method of sliding window (a cell) of 0.5 m × 0.5 m would provide the whole algorithmic workflow by this block results with necessary precision. It expedites processing, eliminates excessive number of points, and makes a whole point set more uniform. If a point net is not dense enough, the sliding window matrix may be increased up to 1 m × 1 m, or even to the size of 2 m × 2 m. Unfortunately, the output result reliability goes drastically down in such a case. To apply a cell size which is even bigger, than 2 m × 2 m seems to become completely useless.
- Initial filtering out of due to the altitude thresholds (block 1.6):The easiest way to remove main part of those drastic topographic outliers is to enter the certain altitude thresholds: to select one lowest point through the net with cells of twice longer edges, than an initial net has; it means—through the twice thinned net in comparison with initial one; in this way, the lowest point is one from four others that belong to this cell selected; a TIN is being constructed through this thinned point net; those points from an initial net are added to an obtained TIN, which are topographically close to that derivative surface, that would be constructed through this TIN obtained.
- Initial filtering out according to the point net smoothing values (block 1.7 of the Non-Ground branch—Figure 1):A TIN has to be built on the base of points selected in previous algorithmic blocks. All those edges of triangles that are longer than 1.5 m within X, Y plane, and longer than 4 m in 3D space should be removed from this TIN. After the edge removal the number of TIN facets is substantially decreased. For each of the facets (a “core” facet) left, the angles, each of them makes with neighboring facets, should be considered. Normally the number of neighboring facets changes from 0 to 3. If more than half of derivative angles significantly differ from 0 or from 180 degrees, this “core” facet should be removed. The interactive process of facet removal for satisfactory reliability of the output results should be thricely repeated. Interconnected parcels, which include not fewer, than two facets, and with an area not smaller, than one cell of the initial net (0.25 m2), are selected from that TIN content that has been left after that edge removal. Within the processing in this algorithmic block, the accepted angle between two facets stays within a range from −20 till +20 degree, and from 160 till 200 degrees, either we take in account a negative value of an angle, or not. Bounded parcels with a number of facets fewer than five should be removed.At this point of the Non-Ground branch some customized input parameters for “1.5–1.7 non-ground” classifying algorithmic blocks should be set up for input due to processing into the relevant MLD as it has been shown earlier for blocks 2.2–2.6 (Figure 2).
- Secondary filtering out according to the point net smoothing values (block 1.8):The requirements to the value of the angle between two facets can be made stronger, after initial filtering out of all topographic breaks presented earlier. Filtering out of the previous block is repeated iteratively with allowable angle between the facets of the following range: from −20 to +20 degrees, and from 160 till 200 degrees. Bounded parcels with the number of facets fewer than 5 should be removed.
- Search for the roof continuous planar segments (block 1.9):A TIN has to be built on the base of points selected after completing the secondary filtering. All edges with a too long projection on the plane X, Y are removed from this TIN. If the point density is 2 and more per square m, the facet edges, which are longer than 1.5 m, all should be removed. The parcels of interconnected facets with a total area of 15 m2, and which consist of fewer than 40 facets, should be removed. In this way, we eliminate the pints, which occasionally complete a smoothed surface within a small parcel. An increase of the minimal distance between independent parcels and making less strict requirements due to the number of facets within an interconnected parcel may help with processing of some thinned point net of the low point density. From the other side, such solution may substantially increase the probability of the wrong classifying results through those parcels, which occasionally appear to be smoothed ones.
- Smoothing extension of the surfaces (block 1.10):We have delineated only some from roof surfaces with cut edges and probably without some invisible roof components upon previous algorithmic blocks (refer to Figure 1). Thus, upon this eleventh algorithmic block we should extent smoothly each isolated roof parcel for account of points in its neighborhood. This procedure consists of several iterations until either the newly generated roof surface reaches the spatial limits defined, or the maximally allowed number of iterations is completed. Thus, we can obtain an enlarged smoothed roof area by combining several roof parcels in one joint as an output result.At this point of the Non-Ground branch input parameters for “1.8–1.10 non-ground” classifying algorithmic blocks should be set up for input into the relevant MLD as it has been done for selected sets of blocks above in both branches.
- Roof planar segments’ refinement by capturing of neighboring points (block 1.11):The finalized procedure of the first algorithmic branch is the enhancement of the roof surfaces by all those points that are on insignificant height from the derivative roof surface. In this way, all those points, earlier removed from building point sets upon previous intentional point thinning are classified as the building ones.
- Roof planes and building facades (due to the Basic HPM algorithm [54]) extracted (block 1.12):An overall algorithmic output consists of 3D city models of building features as well as of an urban surface, which is of high precision (an edge of a grid cell is not more, than 50 cm)—it is represented by a concluding block of the flowchart (Figure 1). Even an attempt of a reconstruction of the “smart urban environment” upon the Smart City concept implementation may be provided on the base of this approach [9].
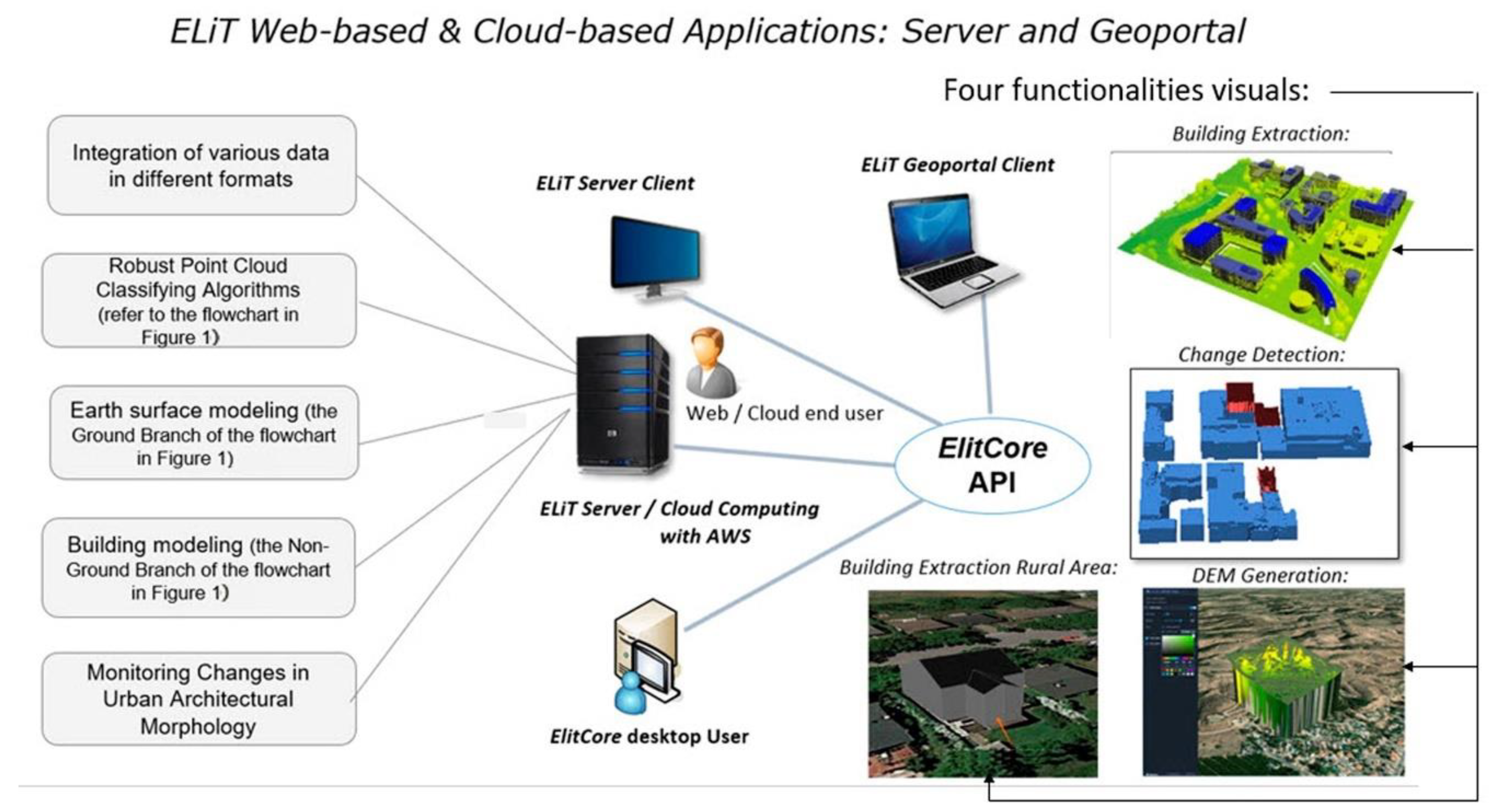
2.4. Multifunctioal Web- and Cloud-Based Software for DEM-G/AFE Purposes
2.4.1. ELiTCore Desktop and Web-Based ELiT Server
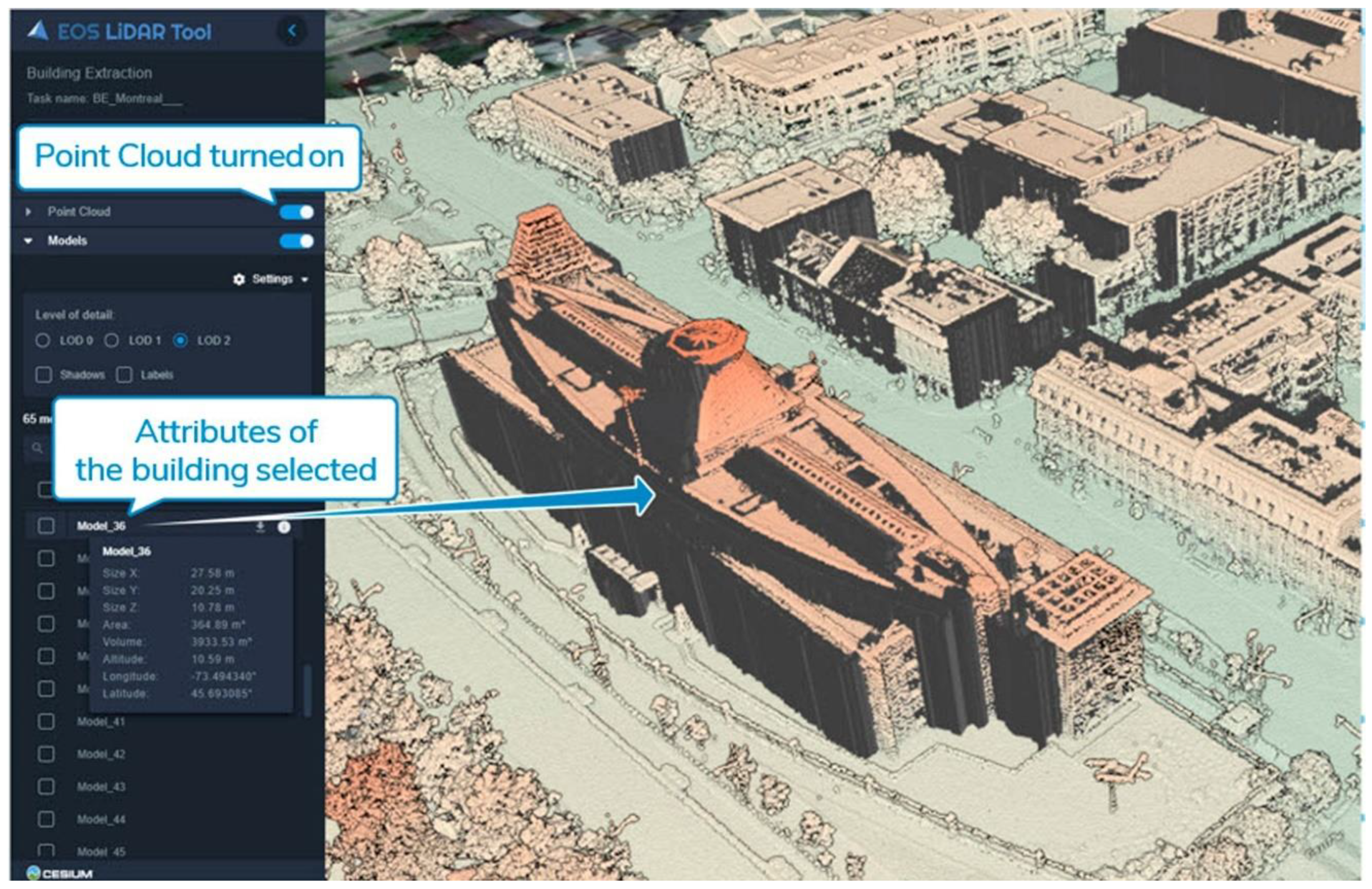
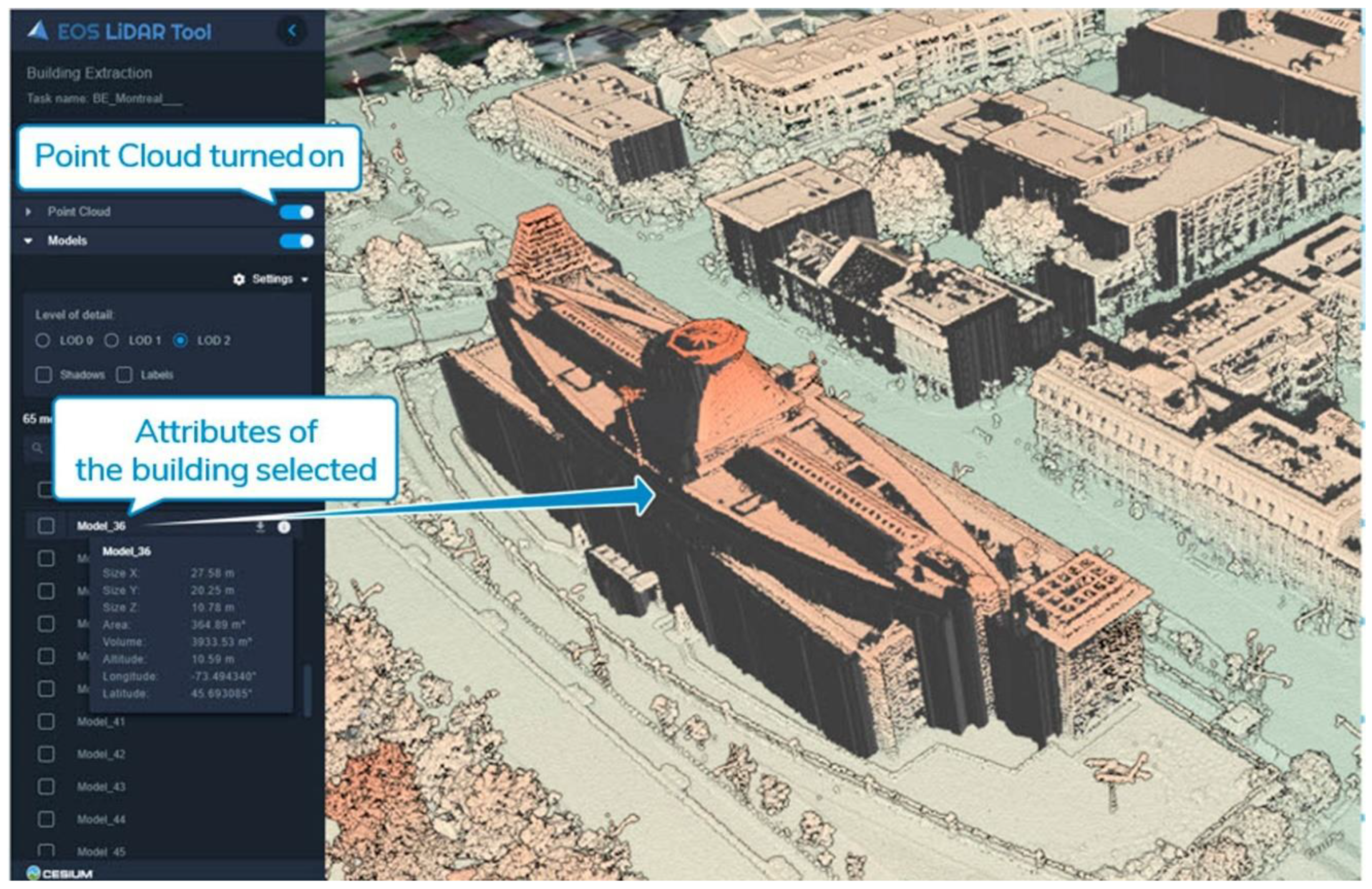
- The building extraction (BE) functionality (a sub-page Building Extraction in the Tools page of the Server) provides the high polyhedral modeling according to building detection, extraction, and its reconstruction through that algorithmic solution, which has been presented in detail in the previous section of this text. Finalized building modeling is primarily targeted to high-rise buildings frequently located in city downtowns. The BE-tool of ELiT Server provides generation of heavyweight models, consisting of numerous polyhedrons, which is why they may be described as “heavy ones”. Finalized visualization of these models is provided by the Cesium 3DTiles library with a certain level of detail (LOD), while a primary Lidar point cloud can be visualized too. As a rule, a BE-model mandatory possesses its spatial, geometric, and semantic attributes. Thus, massive urban environment of a city can be simulated as the heavyweight models with minor details (Figure 4).
- The building extraction rural area tool (BERA)—a sub-page building extraction rural area in the Tools page) completes the low polyhedral modeling introduced in some of our previously published methodological texts [9,53,54]. The BERA functionality accomplishes the hierarchical segmentation of point clouds, and separation of extracted planes with further building reconstruction mainly in rural areas and in urban suburbs. Made “lightweight building models” have substantially fewer facets, than heavyweight ones, and a number of points processed for such model are limited by a number of few thousand only. Accepted number may be reached by adaptive thinning at the cost of some minor details. It is possible to produce even “pitched roofs” of low-rise buildings by the BERA-tool with the LPM-technique (Figure 5).
- The change detection functionality (CD)—a sub-page Change Detection, which is on the Tools ELiT page, detects urban alterations of various scales in an AOI selected. Changes in the architectural morphology of a city usually happen through certain spatial extent over some significant period of time, if only it is not any drastic event of environmental or social destruction. The CD functionality indicates locations of changes in georeferenced space and shapes of buildings and infrastructures as 3D models. Normally two point clouds (the initial, and the second one temporally) are compared. The BE-functionality is the only one that is used to determine the difference between two input point clouds, which is computed as the BE-modeled delta of features, which belongs to each from these two clouds, correspondingly.
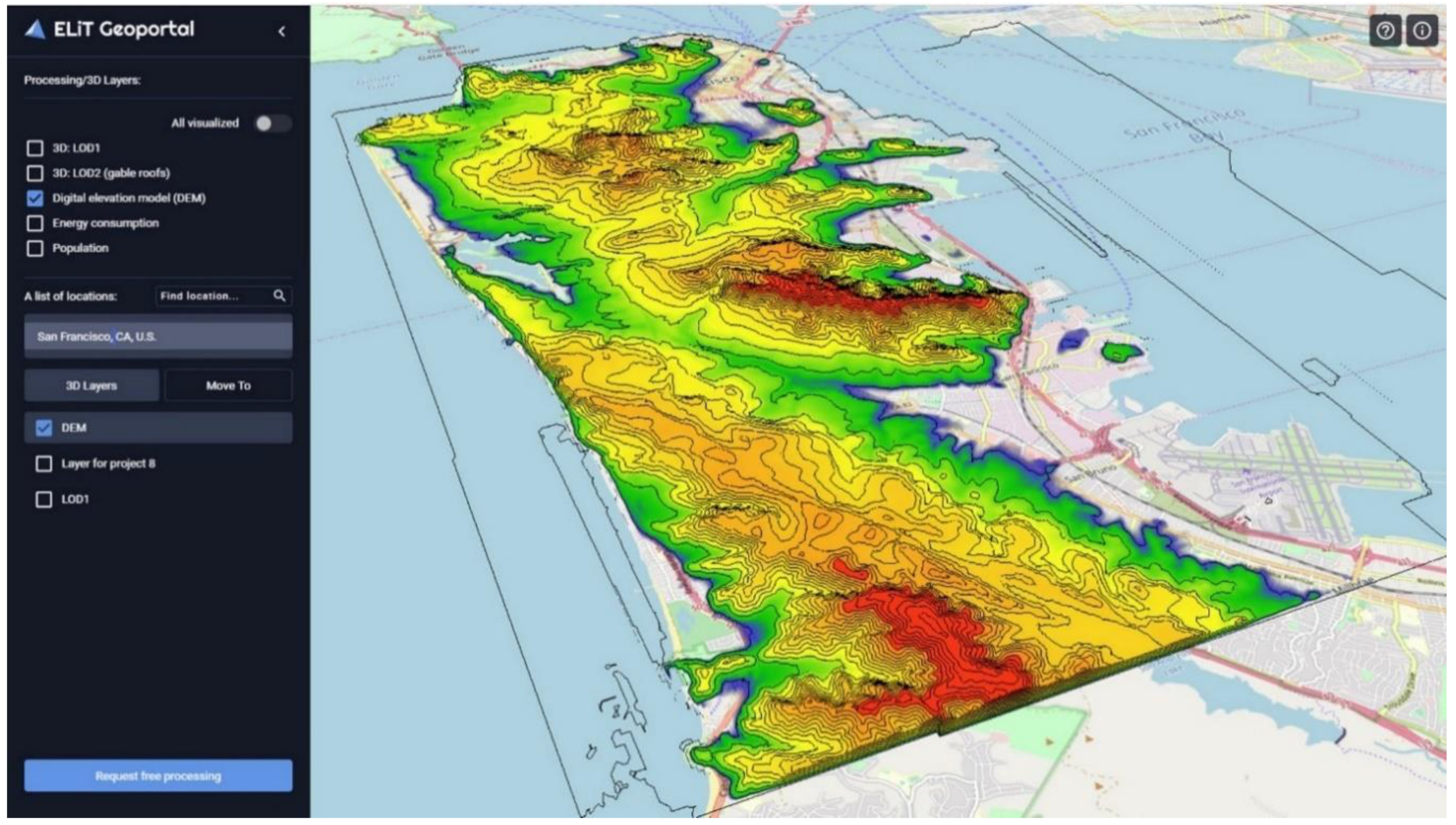
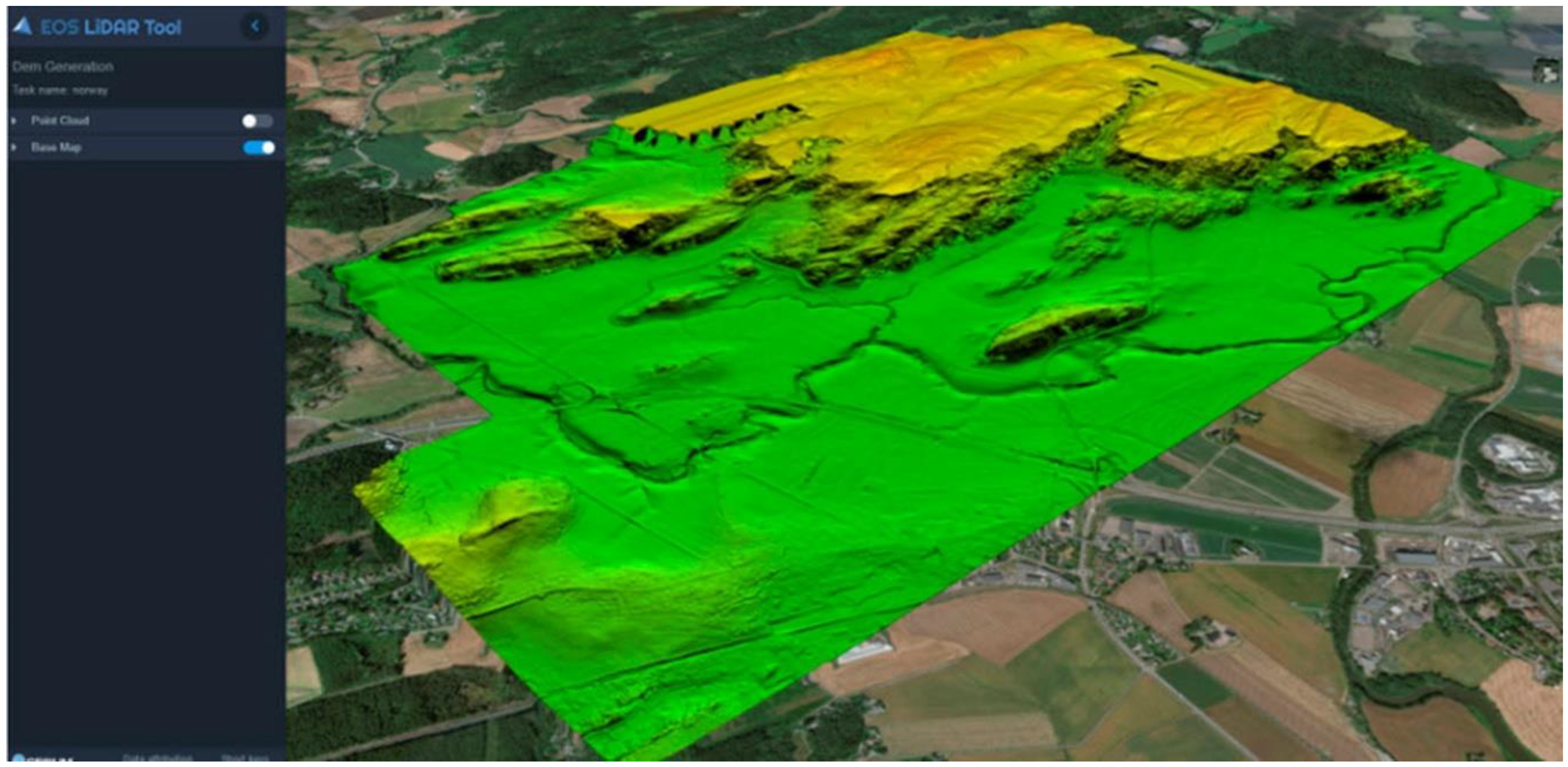
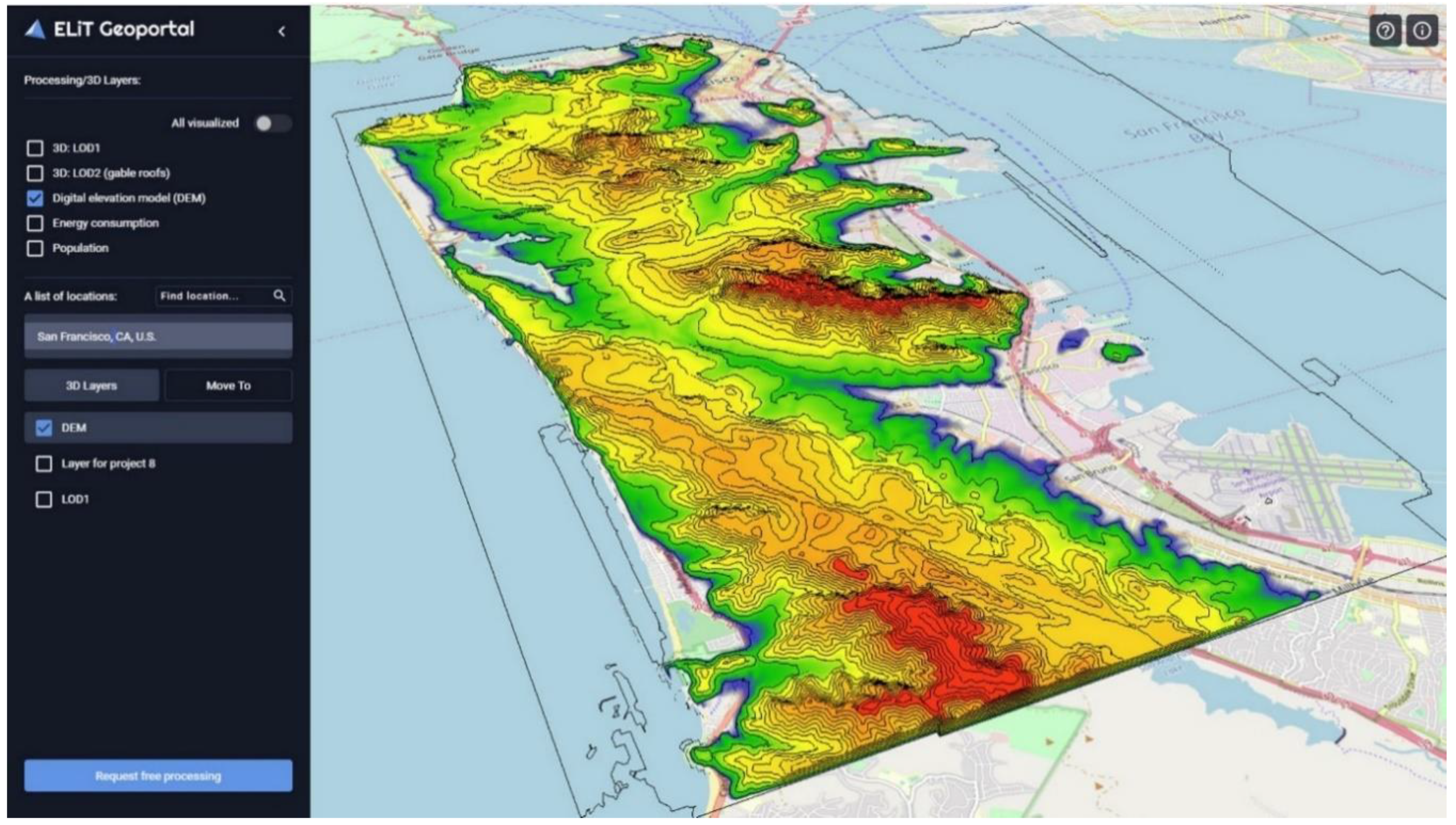
- The DEM generation functionality (DEM-G)—a sub-page in the Tools page accomplishes a generation of a grid of a topographic surface by making a DEM/DSM, that mirrors a particular terrain according to the Ground branch of an algorithmic solution introduced in the previous section of this text (Figure 1). By this functionality a user creates a gridded surface from sample data, what is known as the interpolation. Thus, initial irregularly spaced height points are obtained, from which uniformly spaced elevations are interpolated. A digital elevation model we accept as a synonym of a digital terrain simulating the bare earth surface with regularly spaced z-values of heights. In this way it is possible to provide topographic modeling for the ground surface of various genetic types, e.g., like that post-glacial topography in the visual below (Figure 6).
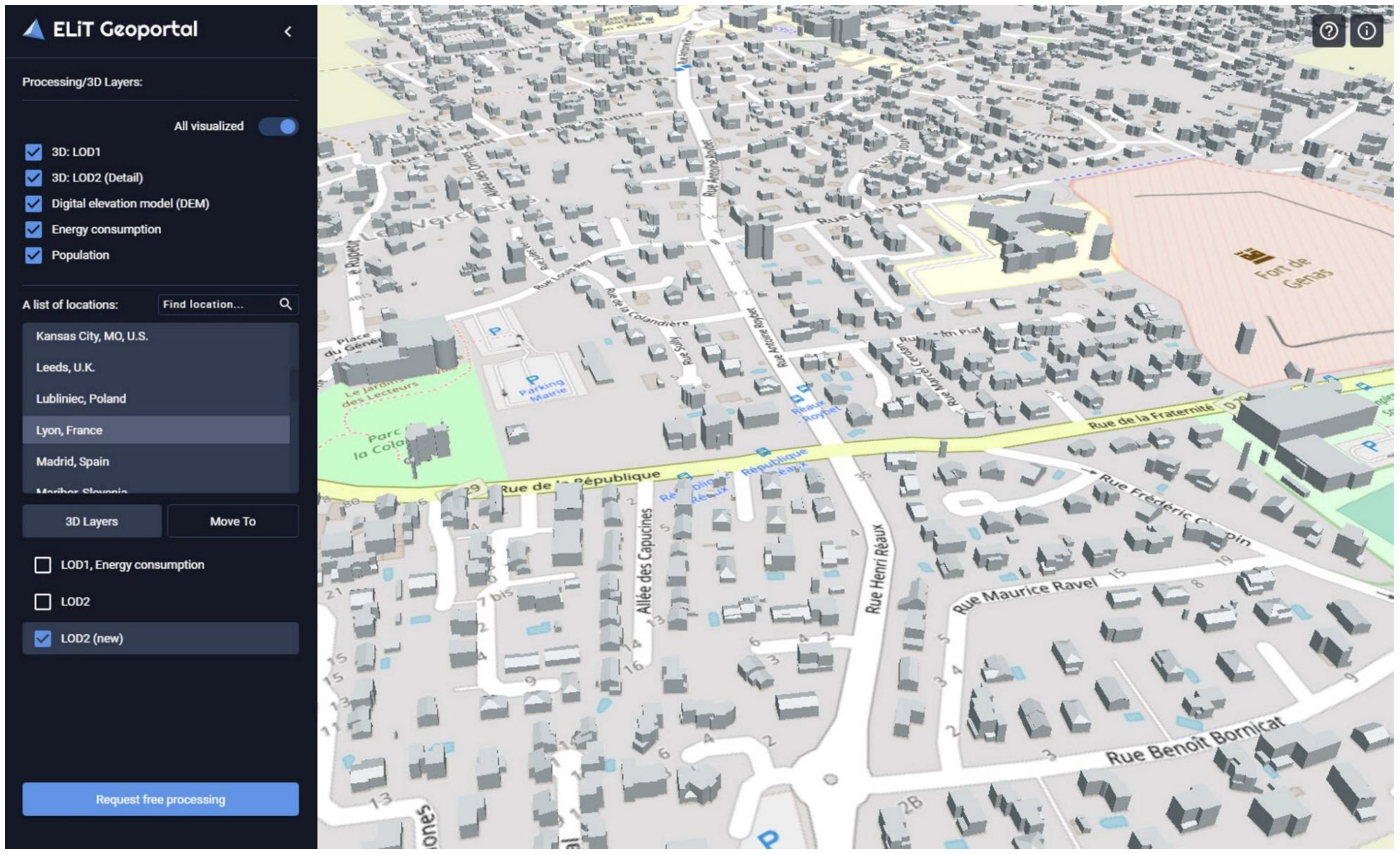
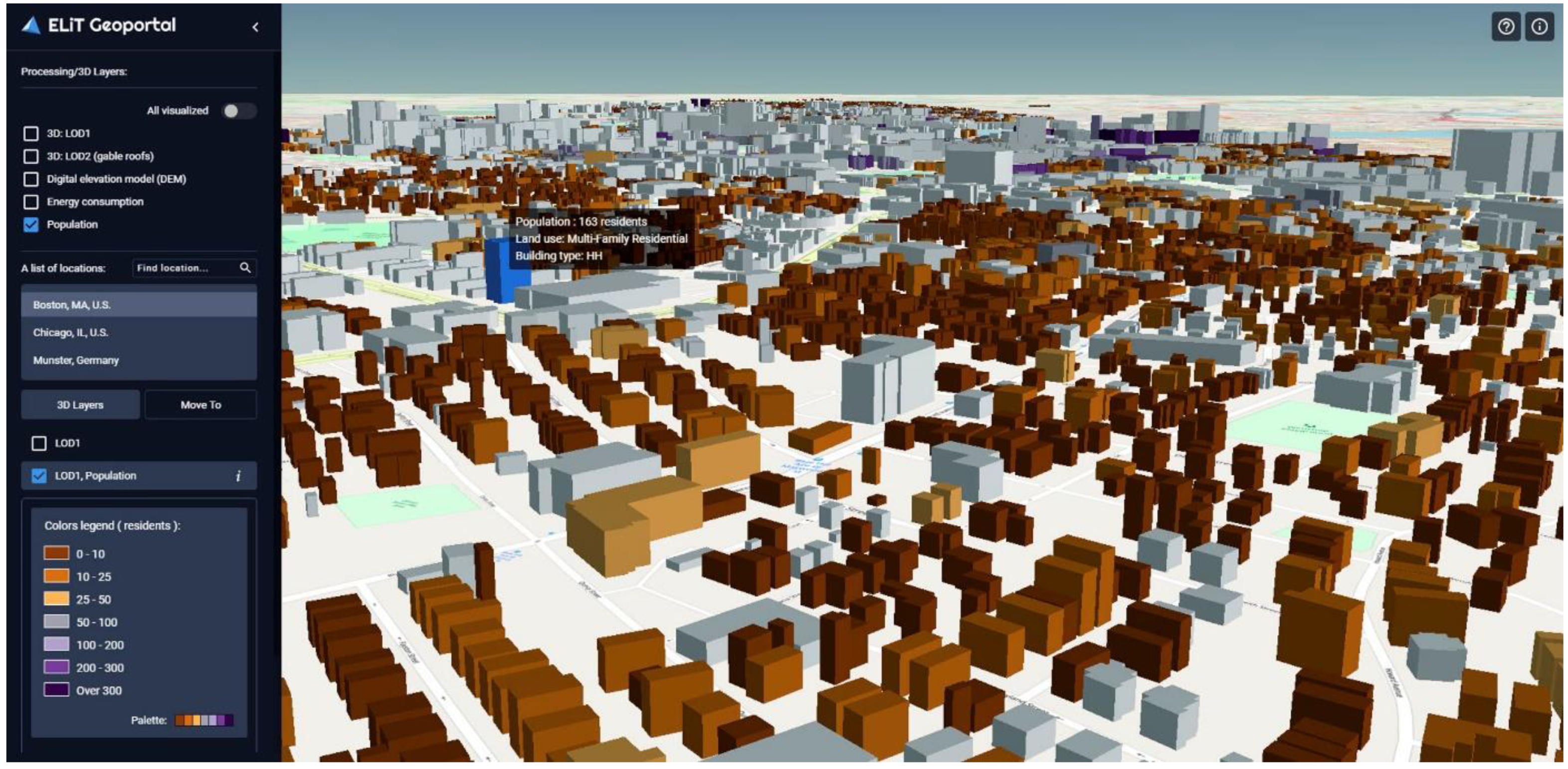
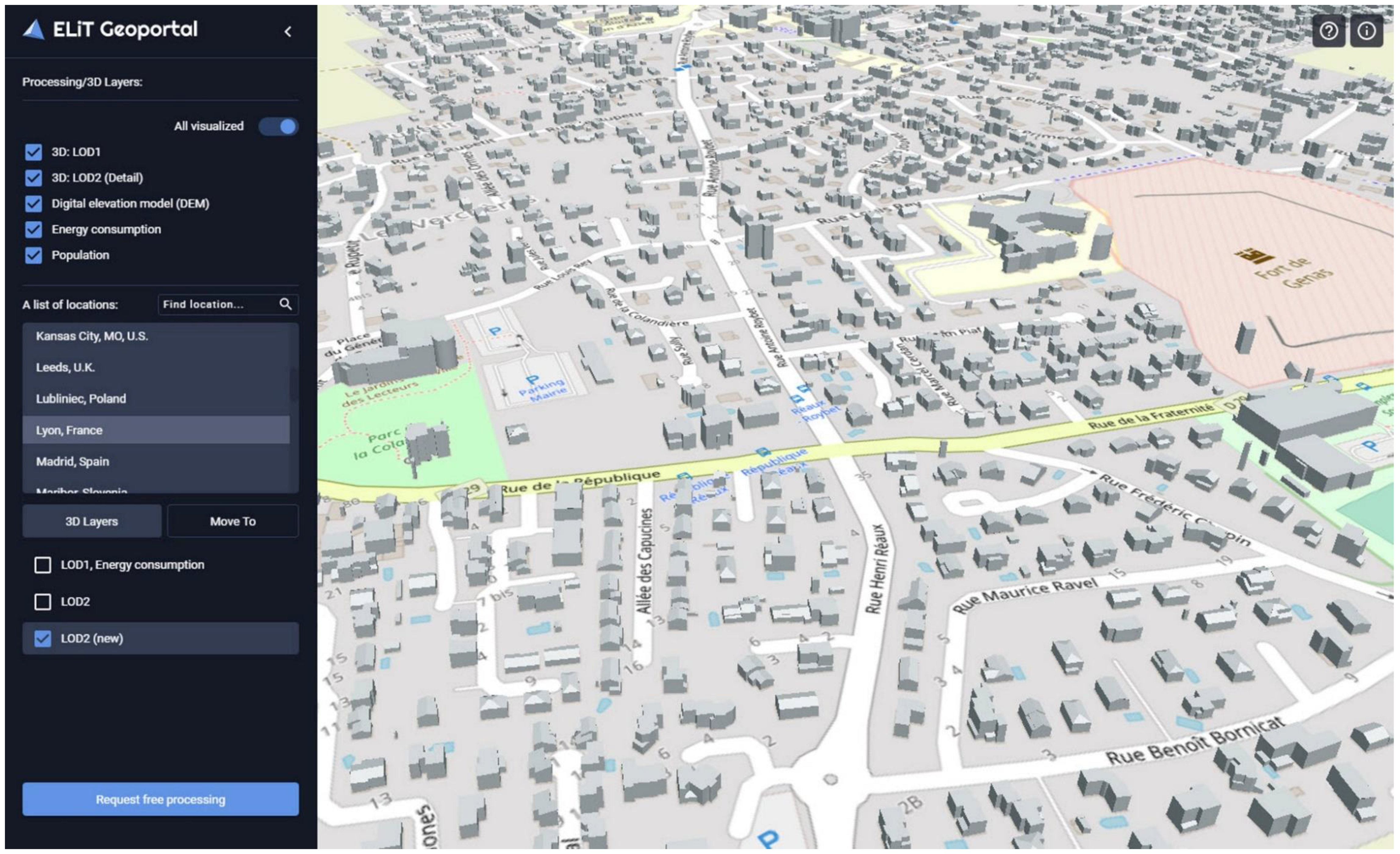
2.4.2. ELiT Geoportal: Visualizing Urban Features with Cesium 3D Tiles
- (1)
- In a common case, partitioning of tiles with their associated bounding volumes for two different datasets are completely independent procedures with no connections between them. Thus, it is evident that for joining these two already partitioned tilesets we would have either to rearrange completely their tree data structures, or to combine these tilesets with partial overlapping only.
- (2)
- It is necessary to select a proper type of a bounding volume as well as an effective approach for its hierarchical organization.
- (3)
- A necessity to update a tileset (or several of them with new feature units), 3.1; a user updates tilesets in local, or in regional scales, 3.2; it is necessary to update tilesets in a global scale (within a whole Globe), 3.3.
3. Results: Presenting Urban Features and DEM on the Geoportal with Thematic Use Cases
3.1. Visualising Geoportal Locations
- A bbox has to be defined for each model. For these purposes, each vertex should be transformed into a coordinate system with EPSG: 4979 (ECEF), and a minimal/maximal coordinate value is defined (parallelized computing).
- For each bbox its size is defined along each axis and a center of this bounding volume. On the base of a size defined we outline a partitioning level and a position in a tileset. A connection between a tile index and a model identifier is stored (parallelized computing).
- A supplementary step. It is necessary to limit a rank of a partitioning level, not fewer than nine, in this way we obtain a tile size (an edge of a square) not fewer than 512 m.
- Obtained indexes of tiles and their size values are used for computing a quadtree of tile partitioning (tileset.json).
- It is necessary to employ a dependency between indexes of tiles and identifiers of models, so that to compute .B3DM files (parallelized computing for each tile).
- The parameters of the first testing package for analysis of “the advanced option” algorithmic results are set for a square edge of 512 m (a size of 1 tile is 0.262144 km2): (1) a number of tiles: 2533; (2) latency time (for a whole data): about one and a half minute; (3) a size of .B3DM files: minimum—3 Kb, (4) maximum—1185 Kb. We can see that this testing package is applicable for an urban are of 664 km2, thus a quite large city can be completely visualized.
- The parameters of the second testing package for analysis of the algorithmic results of this option are set for a square edge of 1024 m (a size of 1 tile is 1.0486 km2): (1) a number of tiles: 719; (2) latency time: about a half of a minute; (3) a size of .B3DM files: minimum—3 Kb, (4) maximum—2589 Kb.
- It can be seen that this testing package is applicable for an urban area of 753 km2; thus, even a larger urban territory can be visualized with this tile structure.
3.2. Thematic Use Cases
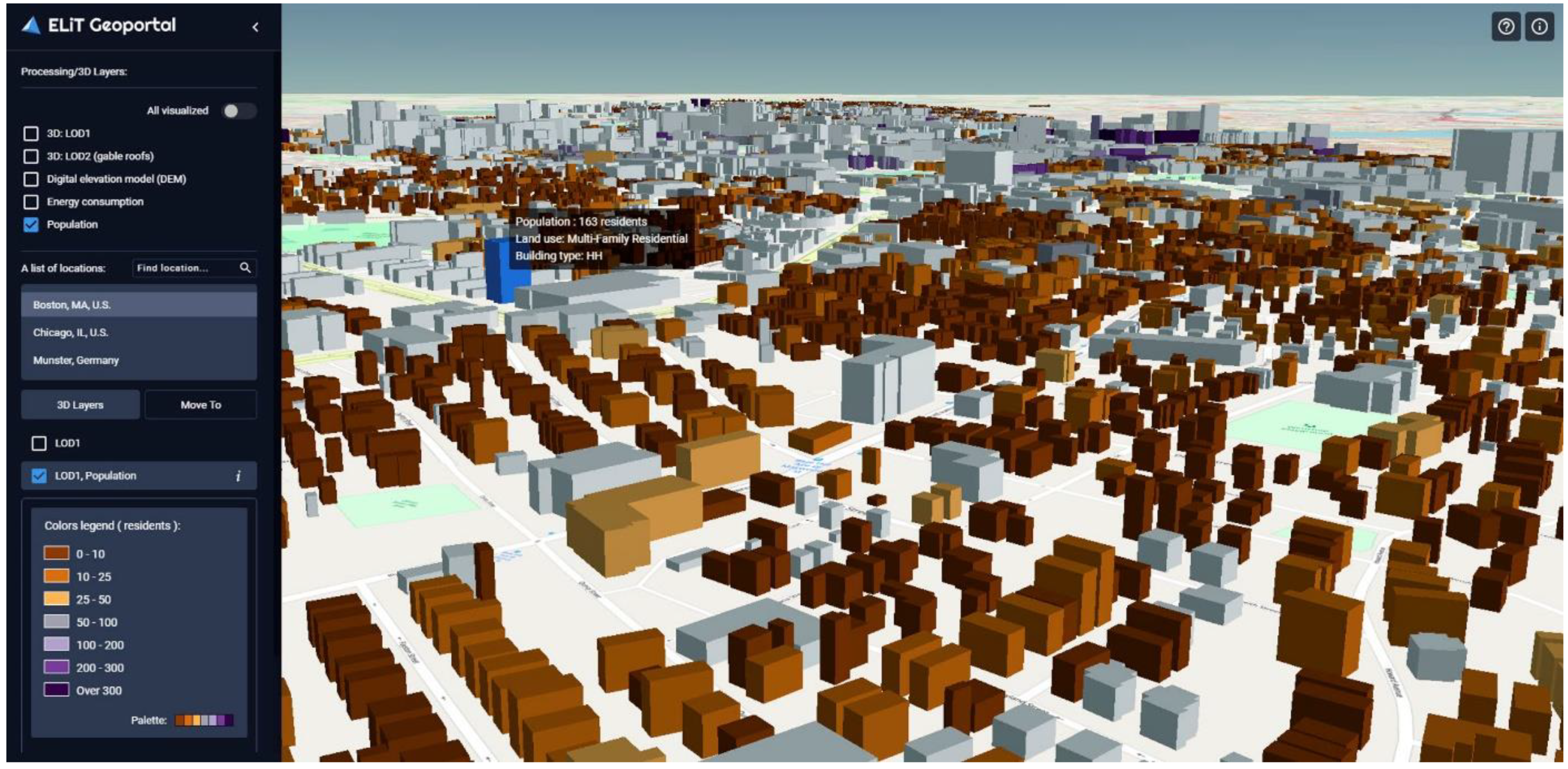
3.2.1. Use Case Population
3.2.2. Use Case Energy
4. Discussion
- Understandably, the latency time (a complete page loading) is the longest one for the biggest location—#14. It is up to 24 minutes with “the initial option”, and we have to take into account, that only LOD1 boxes could be constructed for this location due to extremely low average lidar point density for it (0.6 points per square meter). Thus, applying “the advanced option” we have accelerated rendering up to 10 min for all features of the location to be rendered.
- It is noteworthy, that there is no a direct dependency between a number of models and the latency of a given location page. Nonetheless, if existing this dependency is more evident for LOD1 locations, than for LOD2 ones.
- The best improvements in rendering (only those locations were estimated, which would possess some significant number of models, at least—several tens of thousands), while comparing “the initial option” versus “the advanced one”, can be observed: for location #3 the latency time has been reduced from 14 min to 6 min; for location #4: from 17 to 8; location #15 is being rendered due to some reasons (probably, because of numerous LOD2 models present) even longer, than location #4, despite it has fourfold fewer models; latency time for this location with “the initial option” is 18 min, and it diminishes to 7 min with “the advanced option”.
- Other locations, which demonstrate 2.5–4 times speeding up in rendering, are ##1, 6, and 17 (Table 1).
- Most of other locations present either none, or only slight speeding up in rendering for “the advanced one”, while we compare two “3D Tiles options”.
- There are no evidences for any location, when “the initial 3D Tile option” would have had the faster rendering, than “the advanced 3D Tile option” does.
5. Conclusions
- Raw LiDAR data initial preprocessing;
- Choosing an appropriate (due to the data nature and local urban configurations) solution—either low polyhedral modeling, or high polyhedral one;
- If the latter is selected, not third party’s footprints are involved, but the original ones are extracted according to the basic HPM algorithm;
- Provision of the completely original two-branched DEM-G/AFE classifying algorithm, following by the urban topography generation and the feature extraction with customized setting up of processing in particular algorithmic blocks;
- Enhancement of the existing architectural scheme of software family, shifting emphasis from a desktop to its web- and cloud-components, what allows to process huge data volumes;
- Multifunctional application of software key functionalities: BE, BERA, CD, and DEM-G;
- Elaborating and establishing ELiT Geoportal as a cloud-based application within the frameworks of a service-oriented web-technology;
- Stuffing the Geoportal with the projects of 3D CityGML LOD1/LOD2 models;
- Accomplishing the original visualizing algorithmic solution, that consists of two options, based on optimizing the Cesium 3D Tiles structure for more efficient rendering of urban features on the Geoportal locations;
- Implementing practical thematic use cases for those locations, for which at least some semantic georeferenced data are available: Population Estimation with Building Geometries and Estimation of Energy Consumption by Buildings for Heating and Cooling;
- Upon these use cases’ realization some supplementary unique solutions have been provided, e.g., our original technique of automated definition of building type by its topology and geometry.
Author Contributions
Funding
Conflicts of Interest
References
- Esch, T.; Thiel, M.; Schenk, A.; Roth, A.; Muller, A.; Dech, S. Delineation of Urban Footprints from TerraSAR-X Data by Analyzing Speckle Characteristics and Intensity Information. IEEE Trans. Geosci. Remote Sens. 2009, 48, 905–916. [Google Scholar] [CrossRef]
- Esch, T.; Heldens, W.; Hirner, A. The Global Urban Footprint. In Urban Remote Sensing; Weng, Q., Quattrochi, D., Gamba, P.E., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 34–43. [Google Scholar]
- Dong, P.; Chen, Q. (Eds.) LiDAR Remote Sensing and Applications; CRC Press: Boca Raton, FL, USA, 2018; 246p. [Google Scholar]
- Leduc, T.; Moreau, G.; Billen, R. (Eds.) Usage, Usability, and Utility of 3D City Models; EDP Sciences: Nantes, France, 2012; p. 320. [Google Scholar]
- Billen, R.; Cutting-Decelle, A.F.; Marina, O.; de Almeida, J.P.; Caglioni, M.; Falquet, G.; Leduc, T.; Métral, C.; Moreau, G.; Perret, J.; et al. 3D City Models and Urban Information: Current Issues and Perspectives; EDP Sciences: Les Ulis, France, 2014; pp. 1–118. [Google Scholar]
- Julin, A.; Jaalama, K.; Virtanen, J.-P.; Pouke, M.; Ylipulli, J.; Vaaja, M.; Hyyppä, J.; Hyyppä, H. Characterizing 3D City Modeling Projects: Towards a Harmonized Interoperable System. ISPRS Int. J. Geo-Inf. 2018, 7, 55. [Google Scholar] [CrossRef] [Green Version]
- Biljecki, F.; Stoter, J.; LeDoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D City Models: State of the Art Review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Kostrikov, S.V.; Niemets, L.M.; Sehida, K.Y.; Niemets, K.A.; Morar, C. Geoinformation Approach to the Urban Geographic System Research (Cases Studies of Kharkiv Region). 2018. Available online: https://periodicals.karazin.ua/geoeco/article/view/12429 (accessed on 15 June 2020).
- Kostrikov, S.V. Urban Remote Sensing with LiDAR for the Smart City Concept Implementation. 2019. Available online: https://www.readcube.com/articles/10.26565%2F2410-7360-2019-50-08 (accessed on 16 June 2020).
- Billen, R.; Zaki, C.; Servieres, M.; Moreau, G.; Hallot, P. Developing an ontology of space: Application to 3D city modeling. In Usage, Usability, and Utility of 3D City Models; Leduc, T., Moreau, G., Billen, R., Eds.; EDP Sciences: Nantes, France, 2012; pp. 1–14. [Google Scholar]
- Brenner, C. Towards fully automatic generation of city models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 1–8. [Google Scholar]
- Zhu, Q.; Hu, M.; Zhang, Y.; Du, Z. Research and practice in three-dimensional city modeling. Geo-Spat. Inf. Sci. 2009, 12, 18–24. [Google Scholar] [CrossRef]
- Yin, X.; Wonka, P.; Razdan, A. Generating 3D building models from architectural drawings: A survey. IEEE Comput. Graph. Appl. 2009, 29, 20–30. [Google Scholar] [CrossRef]
- Kolbe, T.H. Representing and Exchanging 3D City Models with CityGML. 2009. Available online: https://0-link-springer-com.brum.beds.ac.uk/chapter/10.1007/978-3-540-87395-2_2, (accessed on 15 June 2020).
- Goetz, M.; Zipf, A. Towards defining a framework for the automatic derivation of 3D CityGML models from Volunteered Geographic Information. Int. J. 3-D Inf. Model. 2012, 1, 1–16. [Google Scholar] [CrossRef]
- Open Geospatial Consortium. OGC City Geography Markup Language (CityGML) Encoding Standard 2.0.0; Open Geospatial Consortium: Wayland, MA, USA, 2012. [Google Scholar]
- Schilling, A.; Bolling, J.; Nagel, C. Using glTF for Streaming CityGML 3D City Models. 2016. Available online: https://0-dl-acm-org.brum.beds.ac.uk/doi/10.1145/2945292. (accessed on 17 May 2020).
- Biljecki, F.; Ledoux, H.; Stoter, J.E. Generation of multi-LOD 3D city models in CityGML with the procedural modelling engine Random3Dcity. In Proceedings of the 1st International Conference on Smart Data and Smart Cities, 30th UDMS, Split, Croatia, 7–9 September 2016. [Google Scholar] [CrossRef]
- Weng, Q.; Quattrochi, D.; Gamba, P.E. (Eds.) Urban Remote Sensing; CRC Press: Boca Raton, FL, USA, 2018; p. 387. [Google Scholar]
- Haala, H.; Brenner, C. Extraction of buildings and trees in urban environments. ISPRS J. Photogramm. Remote Sens. 1999, 54, 130–137. [Google Scholar] [CrossRef]
- Maas, H.G.; Vosselman, G. Two algorithms for extracting building models from raw laser altimetry data. ISPRS J. Photogramm. Remote Sens. 1999, 54, 153–163. [Google Scholar] [CrossRef]
- Ackermann, F. Airborne laser scanning: Present status and future expectations. ISPRS J. Photogramm. Remote Sens. 1999, 54, 64–67. [Google Scholar] [CrossRef]
- Elaksher, A.F.; James, S.B. Reconstructing 3D buildings from lidar data. ISPRS Arch. 2002, 34, 102–107. [Google Scholar]
- Pu, S.; Vosselman, G. Knowledge based reconstruction of building models from terrestrial laser scanning data. ISPRS J. Photogramm. Remote Sens. 2009, 64, 575–584. [Google Scholar] [CrossRef]
- Haala, N.; Kada, M. An update on automatic 3D building reconstruction. ISPRS J. Photogramm. Remote Sens. 2010, 65, 570–580. [Google Scholar] [CrossRef]
- Wang, R. 3D building modeling using images and LiDAR: A review. Int. J. Image Data Fusion 2013, 4, 273–292. [Google Scholar] [CrossRef]
- Yan, W.Y.; Shaker, A.; El-Ashmawy, N. Urban land cover classification using airborne LiDAR data: A review. Remote Sens. Environ. 2015, 158, 295–310. [Google Scholar] [CrossRef]
- Ahokas, E.; Kaartinen, H.; Hyyppä, J. A quality assessment of airborne laser scanner data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2003, 34, 1–7. [Google Scholar]
- Dorninger, P.; Pfeifer, N. A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds. Sensors 2008, 8, 7323–7343. [Google Scholar] [CrossRef] [Green Version]
- Lafarge, F.; Mallet, C. Creating large-scale city models from 3D-point clouds: A robust approach with hybrid representation. Int. J. Comput. Vis. 2012, 99, 69–85. [Google Scholar] [CrossRef]
- Teo, T.A.; Shi, T.Y. Lidar-based change detection and change type determination in urban areas. Int. J. Remote Sens. 2012, 34, 968–981. [Google Scholar] [CrossRef]
- Anders, N.S.; Seijmonsbergen, A.C.; Bouten, W. Geomorphological change detection using object-based feature extraction from multi-temporal LiDAR data. IEEE Geosci. Remote. Sens. Lett. 2013, 10, 1587–1591. [Google Scholar] [CrossRef] [Green Version]
- Fowler, R.A.; Samberg, A.; Flood, M.J.; Greaves, T.J. Topographic and Terrestrial Lidar. In Digital Elevation Model Technologies and Applications: The DEM Users Manual, 2nd ed.; Maune, D.F., Ed.; ASPRS: Bethesda, MD, USA, 2007; pp. 199–252. [Google Scholar]
- Cao, L.; Coops, N.C.; Innes, J.L.; Dai, J.S.; Ruan, H.; She, G. Tree species classification in subtropical forests using small-footprint full-waveform LiDAR data. Int. J. Appl. Earth Obs. 2016, 49, 39–51. [Google Scholar] [CrossRef]
- Kada, M.; McKinley, L. 3D building reconstruction from LiDAR based on a cell decomposition approach. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 38, 47–52. [Google Scholar]
- Li, M.; Nan, L.; Smith, N.; Wonka, P. Reconstructing building mass models from uav images. Comput. Graph. 2016, 54, 84–93. [Google Scholar] [CrossRef] [Green Version]
- Landa, J.; Prochazka, D. Automatic road inventory using LiDAR. Procedia Econ. Financ. 2014, 12, 363–370. [Google Scholar] [CrossRef] [Green Version]
- Alharthy, A.; Bethel, J. Heuristic filtering and 3D feature extraction from LiDAR data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 23–28. [Google Scholar]
- Sithole, G.; Vosselman, G. Filtering of airborne laser scanner data based on segmented point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 34, 66–71. [Google Scholar]
- Shan, J.; Sampath, A. Building extraction from 3D LiDAR Point Clouds based on clustering techniques. In Topographic Laser Ranging and Scanning: Principles and Processing; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA, 2008; pp. 423–446. [Google Scholar] [CrossRef]
- Lafarge, F.; Descombes, X.; Zerubia, J.; Pierrot-Deseilligny, M. Automatic building extraction from DEMs using an object approach and application to the 3D-city modeling. J. Photogramm. Remote Sens. 2008, 63, 365–381. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Li, Y.; Li, W.; Dai, H. A multiresolution hierarchical classification algorithm for filtering airborne LiDAR data. J. Photogramm. Remote Sens. 2013, 82, 1–9. [Google Scholar] [CrossRef]
- Weinmann, M.; Schmidt, A.; Mallet, C.; Hinz, S.; Rottensteiner, F.; Jutzi, B. Contextual classification of point cloud data by exploiting individual 3D neighbourhoods. ISPRS Int. Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 2, 271–278. [Google Scholar]
- Dollner, J.; Buchholz, J. Continuous Level-Of-Detail Modeling of Buildings in 3D City Models. 2005. Available online: https://0-dl-acm-org.brum.beds.ac.uk/doi/10.1145/1097064.1097089 (accessed on 10 March 2020).
- Muller, P.; Wonkqa, P.; Haegeler, S.; Ulmer, A.; Gool, L.V. Procedural Modeling of Buildings. 2006. Available online: https://0-dl-acm-org.brum.beds.ac.uk/doi/10.1145/1141911.1141931 (accessed on 3 July 2020).
- Brenner, C. Building reconstruction from images and laser scanning. Int. J. Appl. Earth Obs. 2005, 6, 187–198. [Google Scholar] [CrossRef]
- Lin, H.; Gao, J.; Zhou, Y.; Lu, G.; Ye, M.; Zhang, C. Semantic decomposition and reconstruction of residential scenes from LiDAR data. ACM Trans. Graph. 2013, 32, 61–66. [Google Scholar] [CrossRef]
- Cesium, G.S. 3D-Tiles/3D-Tiles Overview. Available online: https://github.com/CesiumGS/3d-tiles/blob/master/3d-tiles-overview.pdf (accessed on 18 July 2020).
- Green, I.; Gervang, C.; Villa, I. Taking City Visualization into the Third Dimension with Point Clouds, 3D Tiles, and Deck.gl. 2019. Available online: https://eng.uber.com/3d-tiles-loadersgl/ (accessed on 19 July 2020).
- Chen, Y.; Shooraj, E.; Rajabifard, A.; Sabri, S. From IFC to 3D Tiles: An integrated open-source solution for visualizing BIMs on Cesium. ISPRS Int. J. Geo-Inf. 2018, 7, 393. [Google Scholar] [CrossRef] [Green Version]
- Du, S.; Zhang, Y.; Zou, Z.; Xu, S.; He, X.; Chen, S. Automatic building extraction from LiDAR data fusion of point and grid-based features. ISPRS J. Photogram. Remote Sens. 2017, 130, 294–307. [Google Scholar] [CrossRef]
- Kostrikov, S.; Pudlo, R.; Kostrikova, A. Three key EOS LiDAR Tool functionalities for Urban Studies. In Proceedings of the 39th Asian Conference on Remote Sensing (ACRS 2018): Remote Sensing Enabling Prosperity, Kuala Lumpur, Malaysia, 15–19 October 2018; AARS: Tokyo, Japan; Curran Associates Inc.: Red Hook, NY, USA, 2019; Volume 3, pp. 1676–1685. [Google Scholar]
- Kostrikov, S.; Pudlo, R.; Kostrikova, A.; Bubnov, D. Studying of urban features by the multifunctional approach to LiDAR data processing. In Proceedings of the Joint Urban Remote Sensing Event JURSE 2019: New Methodologies for Urban Investigation Through Remote Sensing, Vannes, France, 22–24 May 2019. [Google Scholar] [CrossRef]
- Kostrikov, S.V.; Bubnov, D.Y.; Pudlo, R.A. Urban Environment 3D Studies by Automated Feature Extraction from LiDAR Point Clouds. 2020. Available online: https://www.researchgate.net/publication/342897712_Urban_Environment_3D_studies_by_Automated_Feature_Extraction_from_LiDAR_Point_Clouds (accessed on 20 July 2020).
- Opitz, D.W.; Rao, R.; Blundell, J.S. Automated 3-D feature extraction from terrestrial and airborne Lidar. In ISPRS Commission IV: Bridging Remote Sensing and GIS, Proceedings of the 1st International Conference on Object-Based Image Analysis, Salzburg, Austria, 4–5 July 2006; ISPRS: Sydney, NSW, Australia, 2006. [Google Scholar]
- Liu, X.; Zhang, Z. LIDAR data reduction for efficient and high quality DEM generation. In Proceedings of the XXI Congress of the International Society of Photogrammetry and Remote Sensing (ISPRS 2008), Beijing, China, 3–11 July 2008. [Google Scholar]
- Alexander, C.; Smith-Voysey, S.; Jarvis, C.; Tansey, K. Integrating building footprints and LiDAR elevation data to classify roof structures and visualise buildings. Comput. Environ. Urban Syst. 2009, 33, 285–292. [Google Scholar] [CrossRef]
- Sampath, A.; Shan, J. Segmentation and Reconstruction of Polyhedral Building Roofs from Aerial Lidar Point Clouds. IEEE Trans. Geosci. Remote. Sens. 2009, 48, 1554–1567. [Google Scholar] [CrossRef]
- Yan, J.; Jiang, W.; Shan, J. A global solution to topological reconstruction of building roof models from airborne LiDAR point clouds. ISPRS Int. Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 379–386. [Google Scholar] [CrossRef]
- Quackenbush, L.J. A Review of Techniques for Extracting Linear Features from Imagery. Photogramm. Eng. Remote. Sens. 2004, 70, 1383–1392. [Google Scholar] [CrossRef] [Green Version]
- Linares, S.; Picone, N. Application of remote sensing and cellular automata model to analyze and simulate urban density changes. In Urban Remote Sensing, 2nd ed.; Weng, Q., Quattrochi, D., Gamba, P.E., Eds.; CRC Press: Boca Ranton, FL, USA, 2018; pp. 268–287. [Google Scholar]
- Flener, C.; Vaaja, M.; Jaakkola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppä, H.; Hyyppä, J.; Alho, P. Seamless mapping of river channels at high resolution using mobile LiDAR and UAV-photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef] [Green Version]
- Habib, A.F.; Zhai, R.; Kim, C. Generation of complex polyhedral building models by integrating stereo-aerial imagery and lidar data. Photogram. Eng. Remote Sens. 2010, 76, 609–623. [Google Scholar] [CrossRef]
- Jochem, A.; Hцfle, B.; Wichmann, V.; Rutzinger, M.; Zipf, A. Area-wide roof plane segmentation in airborne LIDAR point clouds. Comput. Environ. Urban Syst. 2012, 36, 54–64. [Google Scholar] [CrossRef]
- Bormann, D.; Elseberg, J.; Lingemann, K.; Niichter, A. The 3D hough transform for plane detection in point clouds: A review and a new accumulator design. 3D Res. 2011, 2, 1–13. [Google Scholar] [CrossRef]
- Henn, A.; Groger, G.; Stroh, V.; Plumer, V. Model driven reconstruction of roofs from sparse 3D LiDAR Point Clouds. ISPRS J. Photogramm. Remote Sens. 2013, 76, 17–29. [Google Scholar] [CrossRef]
- Maltezos, E.; Ioannids, C. Automatic extraction of building roofs from Airborne LiDAR data applying and extended 3D randomized Hough transform. In Proceedings of the XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016; pp. 209–221. [Google Scholar] [CrossRef] [Green Version]
- Maltezos, E.; Doulamis, A.; Doulamis, N.; Ioannidis, C. Building Extraction from LiDAR Data Applying Deep Convolutional Neural Networks. IEEE Geosci. Remote. Sens. Lett. 2018, 16, 155–159. [Google Scholar] [CrossRef]
- Lafarge, F.; Descombes, X.; Zerubia, J.; Pierrot-Deseilligny, M. Structural approach for building reconstruction from a single DSM. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 135–147. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pfeifer, N.; Mandlburger, G. LiDAR data filtering and digital terrain model generation. In Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 456–490. [Google Scholar] [CrossRef]
- Shan, J.; Sampath, A. Urban DEM generation from raw LiDAR data: A labeling algorithm and its performance. Photogramm. Eng. Remote Sens. 2009, 75, 427–442. [Google Scholar] [CrossRef] [Green Version]
- Polat, N.; Uysal, M.; Toprak, A.S. An investigation of DEM generation process based on LiDAR data filtering, decimation, and interpolation methods for an urban area. Measurement 2015, 75, 50–56. [Google Scholar] [CrossRef]
- Freeland, T.; Heung, B.; Burley, D.V.; Clark, G.; Knudby, A. Automated feature extraction for prospection and analysis of monumental earthworks from aerial LiDAR in the Kingdom of Tonga. J. Archaeol. Sci. 2016, 69, 64–74. [Google Scholar] [CrossRef]
- Vosselman, G. Slope based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2000, 33, 935–942. [Google Scholar]
- Liu, X. Airborne LiDAR for DEM generation: Some critical issues. Prog. Phys. Geogr. 2008, 32, 31–49. [Google Scholar] [CrossRef]
- Zhang, K.; Whitman, D. Comparison of three algorithms for filtering airborne LiDAR data. Photogramm. Eng. Remote Sens. 2005, 71, 313–324. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.; Wang, L.; Silván-Cárdenas, J.; Currit, N. A multi-directional ground filtering algorithm for airborne LIDAR. ISPRS J. Photogramm. Remote Sens. 2009, 64, 117–124. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.; Wang, L.; Currit, N. Morphology-based Building Detection from Airborne Lidar Data. Photogramm. Eng. Remote. Sens. 2009, 75, 437–442. [Google Scholar] [CrossRef]
- Chen, Q.; Gong, P.; Baldocchi, D.; Xie, G. Filtering Airborne Laser Scanning Data with Morphological Methods. Photogramm. Eng. Remote. Sens. 2007, 73, 175–185. [Google Scholar] [CrossRef] [Green Version]
- Anderson, E.S.; Thompson, J.A.; Austin, R.E. LiDAR density and linear interpolator effects on elevation estimates. Int. J. Remote Sens. 2015, 36, 3889–3900. [Google Scholar] [CrossRef]
- Bandyopadhyay, M.; van Aardt, J.A.N.; Cawse-Nicholson, K. Classification and extraction of trees and buildings from urban scenes using discrete return LiDAR and aerial color imagery. In Proceedings of the SPIE Defense, Security, and Sensing, Baltimore, MD, USA, 29 April–3 May 2013; Volume 8731, pp. 05-1–05-9. [Google Scholar] [CrossRef]
- Magruder, L.A.; Leigh, H.W.; Soderlund, A.; Clymer; Bayer, J.; Neuenschwander, A.L. Automated feature extraction for 3-dimensional point clouds. In Proceedings of the SPIE Defense, Security, and Sensing, Baltimore, MD, USA, 17–21 April 2016. [Google Scholar] [CrossRef]
- Ohori, K.A.; Biljecki, F.; Kumar, K.; LeDoux, H.; Stoter, J. Modeling Cities and Landscapes in 3D with CityGML. In Building Information Modeling; Springer: Berlin/Heidelberg, Germany, 2018; pp. 199–215. [Google Scholar] [CrossRef] [Green Version]
- Singh, P.; Chutia, D.; Sudhakar, S. Development of a web based GIS application for spatial natural resource information system using effective open source software and standards. Int. J. Geogr. Inf. Sci. 2012, 4, 261–266. [Google Scholar] [CrossRef] [Green Version]
- Kostrikov, S.; Vasiliev, V.; Pudlo, R.; Bubnov, D. Urban environment research through its simulation by lidar data processing. In Proceedings of the REGION-2019: The Strategy for Optimal Development, Kharkiv, Ukraine, 16–18 October 2019; pp. 34–37, In Ukrainian with English summary. [Google Scholar]
- Beauont, P.; Longley, P.A.; Maguire, D.J. Geographic information portals—A UK perspective. Comput. Environ. Urban Syst. 2005, 29, 49–69. [Google Scholar] [CrossRef]
- Li, G. Optimizing Subdivisions in Spatial Data Structures. Available online: https://cesium.com/blog/2017/03/30/spatial-subdivision/ (accessed on 4 August 2020).
- Cigolle, Z.; Donow, S.; Evangelakos, D.; Mara, M.; McGuire, M.; Meyer, Q. Survey of Efficient Representations for Independent Unit Vectors. J. Comput. Graph. Tech. 2014, 3, 1–30. Available online: http://jcgt.org/published/ (accessed on 1 August 2020).
- Cozzi, P. Introducing 3D Tiles. Available online: https://cesium.com/blog/2015/08/10/introducing-3d-tiles/ (accessed on 29 July 2020).
- Smith, S.K.; Mandell, M. A comparison of population estimation methods: Housing unit versus component II, ratio correlation and administrative records. J. Am. Stat. Assoc. 1984, 79, 282–289. [Google Scholar] [CrossRef] [PubMed]
- Lo, C.P. Population Estimation Using Geographically Weighted Regression. GIScience Remote. Sens. 2008, 45, 131–148. [Google Scholar] [CrossRef]
- Dong, P.; Ramesh, S.; Nepali, A. Evaluation of small area population estimation using LiDAR, Landsat TM and parcel data. Int. J. Remote Sens. 2010, 31, 5571–5586. [Google Scholar] [CrossRef]
- MassGIS (Bureau of Geographic Information). MassGIS Data: Datalayers from the 2010 U.S. Census. 2012. Available online: https://docs.digital.mass.gov/dataset/massgis-data-datalayers-2010-us-census (accessed on 5 February 2020).
- MassGIS (Bureau of Geographic Information). MassGIS Data: Land Use (2005). 2009. Available online: https://docs.digital.mass.gov/dataset/massgis-data-land-use-2005 (accessed on 9 March 2020).
- Döllner, J.; Kolbe, T.; Liecke, F.; Sgouros, T.; Teichmann, K. The virtual 3D city model of Berlin—Managing, Integrating and communicating complex urban information. In Proceedings of the 25th International Symposium on Urban Data Management UDMS, Aalborg, Denmark, 15–17 May 2006. [Google Scholar]
- Carrión, D. Estimation of the Energetic State of Buildings for the City of Berlin Using a Model Represented in 3D City CityGML Model. Master’s Thesis, Technical University Berlin, Berlin, Germany, 2010; p. 178. [Google Scholar]
- Carrión, D.; Lorenz, A.; Kolbe, T. Estimation of the energetic rehabilitation state of buildings for the city of Berlin using a 3D city model represented in CityGML. In Proceedings of the ISPRS Conference: International Conference on 3D Geoinformation, Berlin, Germany, 3–4 November 2010; Volume XXXVIII-4/W15, pp. 31–35. [Google Scholar]
- Nouvel, R.; Schulte, C.; Eicker, U.; Pietruschka, D.; Coors, V. CityGML-based 3D city model for energy diagnostics and urban energy policy support. In Proceedings of the 13th Conference of International Building Performance Simulation Association, Chambéry, France, 26–28 August 2013; pp. 218–225. [Google Scholar]
- Stzalka, A.; Eicker, U.; Coors, V.; Schumacher, J. Modeling energy demand for heating at city scale. In Proceedings of the Fourth National Conference of IBPSA-USA, New York, NY, USA, 11–13 August 2010; pp. 358–364. [Google Scholar]
- Jaffal, I.; Inard, C.; Ghiaus, C. Fast method to predict building heating demand based on the design of experiments. Energy Build. 2009, 41, 669–677. [Google Scholar] [CrossRef]
- Carneiro, C. Extraction of Urban Environmental Quality Indicators Using LiDAR-Based Digital Surface Models. Ph.D. Thesis, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 2011. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Project ID in ELiT Geodatabase | Project Name of Opensource Lidar Data | Geoportal Location Name | Total Lidar Points | Average Lidar Points Density (PPSM) | LAS Files Number | City GML LOD1/LOD2 Number |
|---|---|---|---|---|---|---|---|
| 1 | 6657 | USGS_LPC_MD_PA_SandySupp_2014_LAS_2016 | Baltimore, MD, USA | 12,994,969,727 | 4.47 | 1697 | 51,302 |
| 2 | 6610 | Barcelona | Barcelona, Spain | 67,211,545 | 0.73 | 25 | 10,947 |
| 3 | 6611 | Barcelona (Filtered) | Barcelona, Spain | 319,694,346 | 1.1 | 76 | 112,902 |
| 4 | 5026 | West_Midlands_Birmingham_etc | Birmingham, UK | 941,594,643 | 1.57 | 2088 | 470,349 |
| 5 | 5119 | USGS_LPC_CO_SoPlatteRiver_Lot5_2013_LAS_2015 | Denver, CO, USA | 33,660,346,453 | 5.18 | 6084 | 4939 |
| 6 | 5114 | USGS_LPC_MI_WayneCo_2017_LAS_2018 | Detroit, MI, USA | 6,877,405,127 | 0.51 | 5798 | 86,553 |
| 7 | 5117 | ARRA-MI_4SECounties_2010 | Detroit, MI, USA | 8,438,736,403 | 0.11 | 6318 | 3159 |
| 8 | 5123 | USGS_LPC_MI_31Co_Oakland_2016_LAS_2019 | Detroit, MI, USA | 8.543,602,713 | 0.49 | 8366 | 21,082 |
| 9 | 5122 | USGS_LPC_IN_WT_B9_Lake_2013_LAS_2016 | Gary, IN, USA | 3,809,037,151 | 0.24 | 1304 | 1309 |
| 10 | 5110 | USGS_LPC_IN_MarionCo_2011_LAS_2016 | Indianapolis, IN, USA | 1,852,560,049 | 0.38 | 978 | 38,183 |
| 11 | 5120 | Lyon_ | Lyon, France | 997,975,464 | 5.06 | 286 | 16,846 |
| 12 | 5117 | KS_Area3-NortheastA_2012 | Kansas-City, MO, USA | 5,209,425,053 | 1.13 | 562 | 32,728 |
| 13 | 6609 | Leeds_ | Leeds, UK | 77,338,830 | 7.96 | 42 | 3849 |
| 14 | 5118 | USGS_LPC_CA_LosAngeles_2016_LAS_2018 | Los Angeles, CA, USA | 62,358,249,705 | 0.6 | 26,996 | 3,119,061 |
| 15 | 6612 | Madrid_ | Madrid, Spain | 427,768,563 | 0.79 | 142 | 126,403 |
| 16 | 5023 | USGS_LPC_FL_PalmBeachCo_2016_LAS_2019 | Miami, FL, USA | 7,056,565 | 1.16 | 18,312 | 956 |
| 17 | 5111 | KS_JacksonCo_2006 | Miami, FL, USA | 1,636,615,433 | 1.04 | 3414 | 85,188 |
| 18 | 5025 | FL_MiamiDadeCo_2007 | Miami, FL, USA | 9,094,836,110 | 1.34 | 2442 | 68,188 |
| 19 | 5115 | WI_WisconsinCo_2006 | Milwaukee, WI, USA | 2,502,208,232 | 0.19 | 26,996 | 1755 |
| 20 | 5121 | USGS_LPC_MN_Phase4_Metro_2011_LAS_2016 | Minneapolis, MN, USA | 8,617,642,240 | 10.96 | 3070 | 48,997 |
| 21 | 6656 | Moncton_ | Moncton, NB, Canada | 2,734,944,967 | 15.55 | 176 | 4872 |
| 22 | 5112 | USGS_LPC_LA_UpperDeltaPlain_2017_LAS_2018 | New Orleans, LA, USA | 46,224,930,331 | 4.72 | 9570 | 424,053 |
| 23 | 5109 | KS_JohnsonCo_2006 | Overland Park, KS, USA | 1,206,071,706 | 0.97 | 2694 | 22,028 |
| 24 | 5021 | USGS_LPC_DE_DelawareValley_2015_LAS_2017 | Philadelphia, PA, USA | 38,973,363,102 | 5.16 | 6924 | 5890 |
| 25 | 5113 | USGS_LPC_UT_Wasatch_L4_2013_LAS_2016 | Salt Lake City, UT, USA | 14,496,166,437 | 11.27 | 2750 | 76,835 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kostrikov, S.; Pudlo, R.; Bubnov, D.; Vasiliev, V. ELiT, Multifunctional Web-Software for Feature Extraction from 3D LiDAR Point Clouds. ISPRS Int. J. Geo-Inf. 2020, 9, 650. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9110650
Kostrikov S, Pudlo R, Bubnov D, Vasiliev V. ELiT, Multifunctional Web-Software for Feature Extraction from 3D LiDAR Point Clouds. ISPRS International Journal of Geo-Information. 2020; 9(11):650. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9110650
Chicago/Turabian StyleKostrikov, Sergiy, Rostyslav Pudlo, Dmytro Bubnov, and Vladimir Vasiliev. 2020. "ELiT, Multifunctional Web-Software for Feature Extraction from 3D LiDAR Point Clouds" ISPRS International Journal of Geo-Information 9, no. 11: 650. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9110650