Generalization of Soundings across Scales: From DTM to Harbour and Approach Nautical Charts




Abstract
:
1. Introduction
2. Related Work
- The legibility constraint: An overdose of information (clutter) slows down the map reading process by the mariner. Thus, only essential information should be depicted on the chart in a form that is clearly and efficiently apprehensible.
- The safety constraint: At every location, the depth portrayed must not be deeper than the depth that was originally measured during the survey; this is to guarantee that a ship never runs aground because of a faulty chart. This constraint is a so-called hard constraint, i.e., it can never be broken.
- The topology constraint: The topology of the depicted map elements must be correct, e.g., depth contours may not intersect.
- The morphology constraint: The map should be as realistic and accurate as possible, i.e., the overall morphology of the underwater surface should be clearly perceivable and characteristic features should be preserved.
2.1. Soundings Classification
2.2. Soundings Generalization
2.3. Soundings Standards and Constraints
3. A New Method for Soundings Generalization across Scales
3.1. Soundings Generalization Framework
- Soundings source is a high resolution DTM (5 m).
- The target charts include: Harbour charts (scales 1:10 K and 1:20 K) and Approach charts (scales 1:40 K and 1:80 K).
- The generalization should be based on IHO specifications.
- The proposed method should be implementable in a standard GIS environment.
- Generalization operator: Soundings generalization is performed only with the elimination operator. No displacement or other generalization operator is applicable;
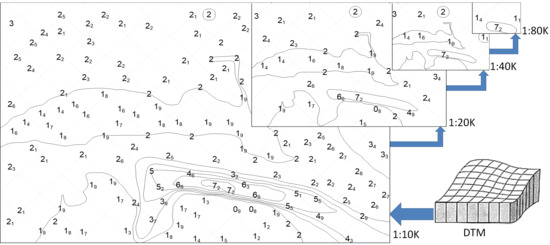
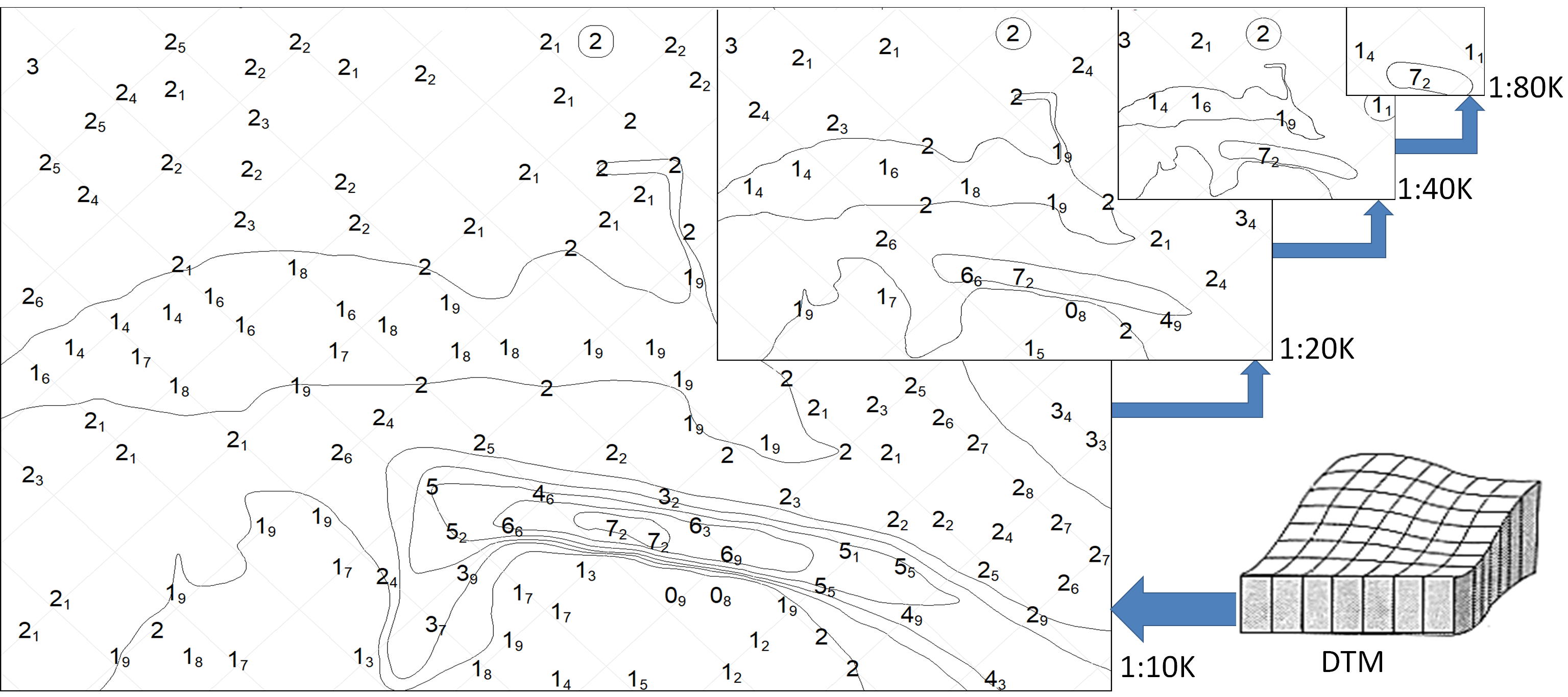
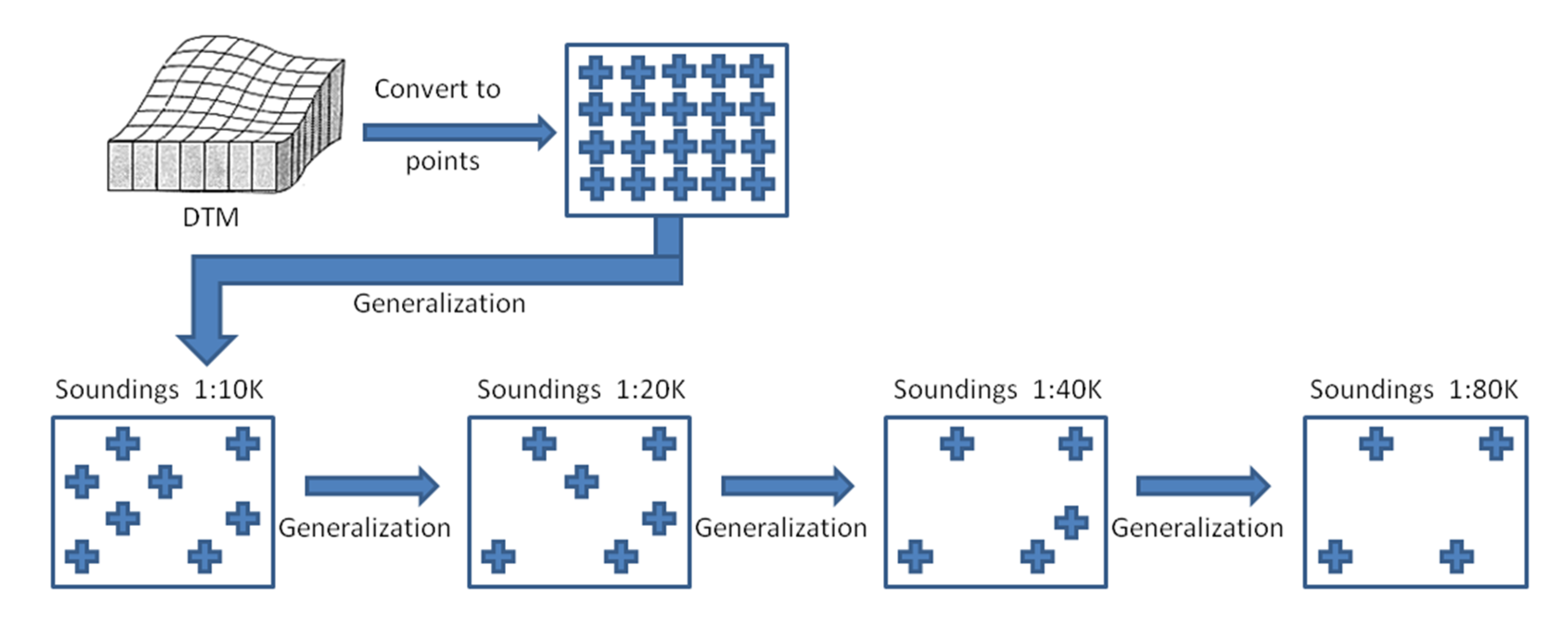
- Sequence of generalization: The ladder approach is applied based on the “Largest scale first” principle. Thus, soundings are decreased gradually in a systematic manner when transition from a large-scale chart into small-scale charts is made;
- Soundings Classification: Specific rules are applied for the selection of soundings belonging to groups with different functionality in depth portrayal;
- Density: The soundings separation distance on charts will vary depending on the depth range. Distances between soundings are defined, in relation to the group they belong to according to their values, in a way that serves the safety of navigation and the aesthetics of the portrayal. In the framework of this project, Table 2 provides the acceptable ranges for separation distances as a function of depth [10]. In addition, any overlay between soundings should be avoided in order to retain cartographic aesthetics;
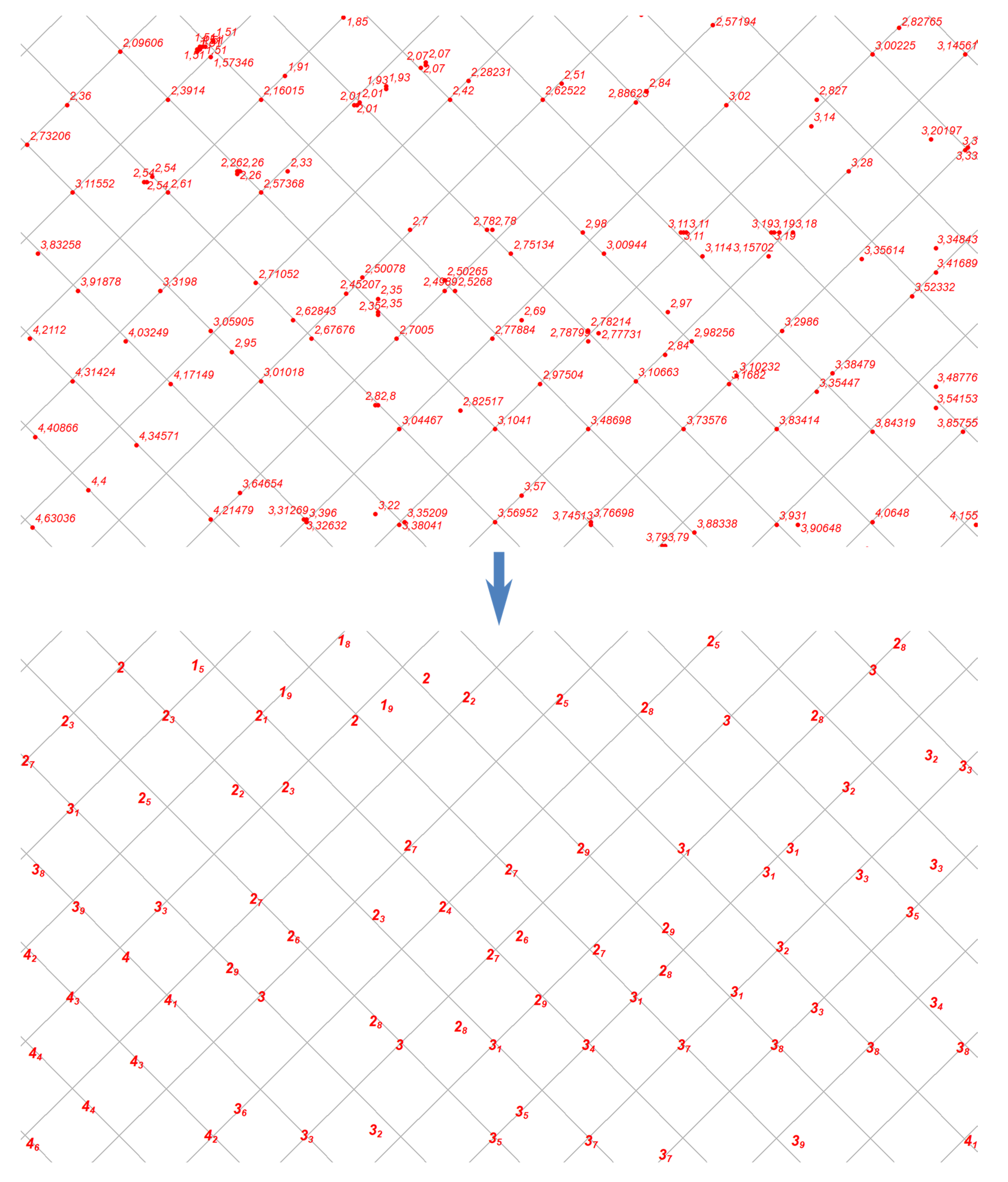
- Pattern: The method aims to achieve a rhomboidal pattern for the portrayed soundings. A rhombus fishnet is used as an auxiliary structure for soundings selection. The rhombus size depends on the depth range and the chart scale. Using the spatial extent limits of each depth range group as defined by the depth contours derived from the DTM, a rhombus fishnet is created and is overlaid on the area under examination. In Table 3, the rhombus size (in meters) and the corresponding R value (equal to half of the fishnet cell dimension) used in this work are shown;
- Processing Areas: Depth areas/ranges on the chart are defined by the depth contours derived from the DTM. Before applying generalization, soundings are grouped according to the depth range of their values (e.g., 0–10 m, 10–25 m), where each soundings group follows its unique best practices. Since depths are not portrayed in the dredged areas, soundings in these areas are not taken into account in the selection process. The overlay of the rhomboidal fishnet on the soundings dataset creates rhomboidal subareas where selection rules according to constraints are applied (see Section 3.2). This way, local processing at a scale related to the nautical chart scale is feasible;
- Rules: The chart product must follow IHO S-4 cartographic rules and maintain surface structure information without violating the depth integrity;
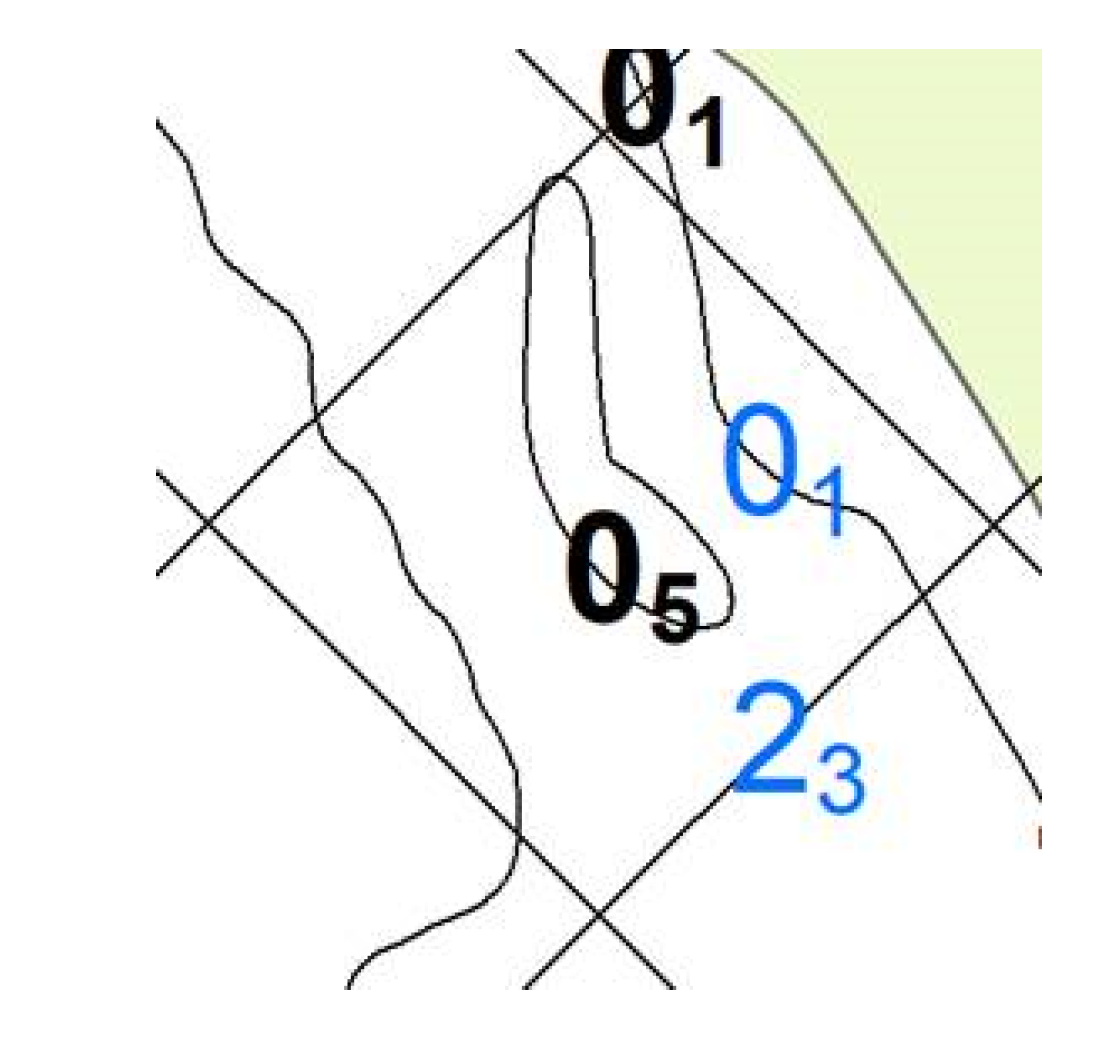
- Retention criteria: Priority is given to the shoal soundings. According to the specifications, shoals should be portrayed along with the deep ones in the vicinity, i.e., those with a depth value difference greater than 20% are selected [7];
- Automation: The new procedure should include automation capabilities for more frequent bathymetry updates as survey technology advances;
- Implementation: The new approach should be easy to implement in a variety of GIS environments (e.g., ESRI or QGIS) with the ability to customize the cartographic rules as new standards or establish unique standards in a given hydrographic office.
3.2. Methodology
3.2.1. Soundings Classification
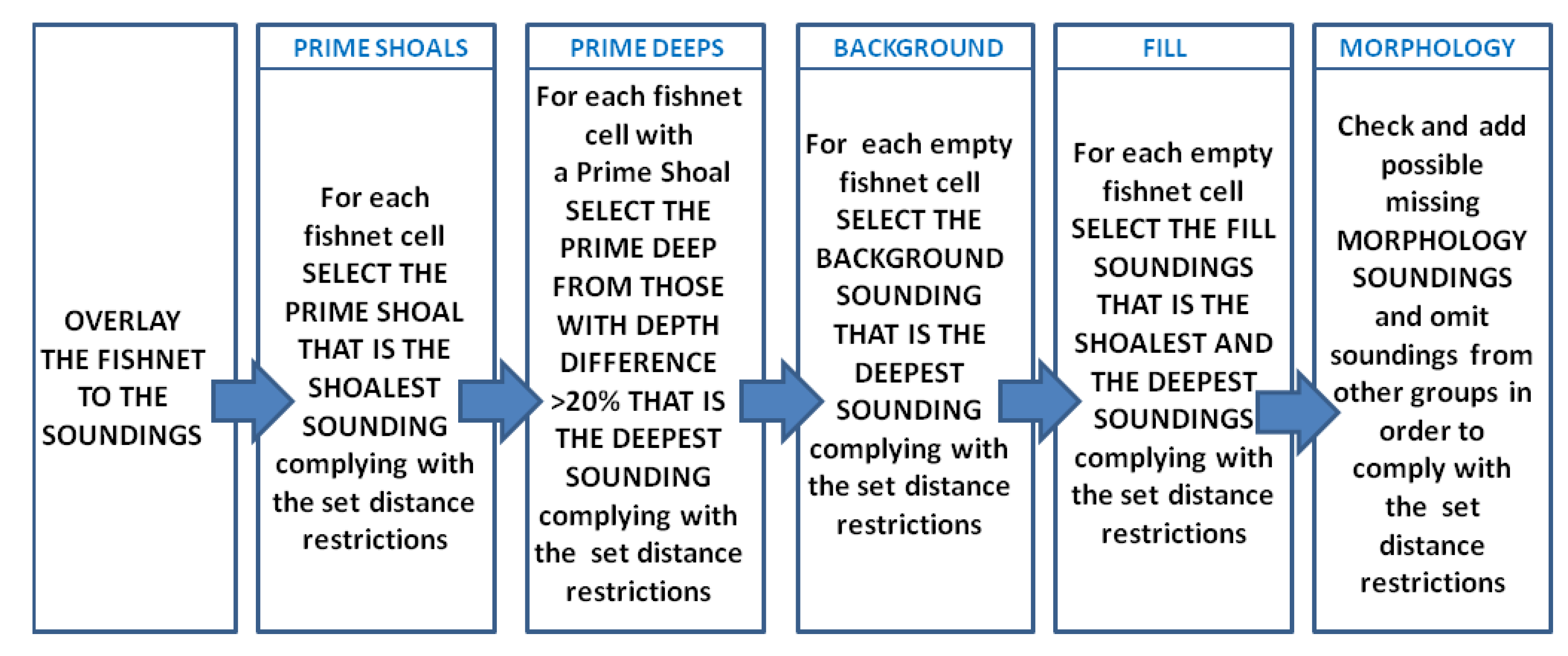
- Prime: Prime soundings include shoals and deeps. Shoals refer to the shallowest sounding for each fishnet cell that fulfils the minimum distance restriction. Deeps refer to the deepest sounding for each fishnet cell that has a value greater or equal than 20% depth difference from the above mentioned shoals, when this is compliant with the minimum distance requirement.
- Background: For each fishnet cell that has no Prime soundings, the deepest sounding is selected. The selection of the Background sounding is in accordance with the minimum distance restriction (Table 2), between two Background soundings as well as the distance from Prime soundings.
- Fill: For each fishnet cell that has no Prime or Background soundings, the shallowest and the deepest soundings are selected following the distance restrictions (Table 2).
- Morphology: Using the same rhombus fishnet, soundings will be added to support the portrayal of the sea bottom morphology. The Morphology soundings are complementary to the depth contours portrayed at each scale. In some cases when the morphology is critical for navigation, other soundings (i.e., Prime, Fill, and Background) will be deleted to meet distance restrictions.
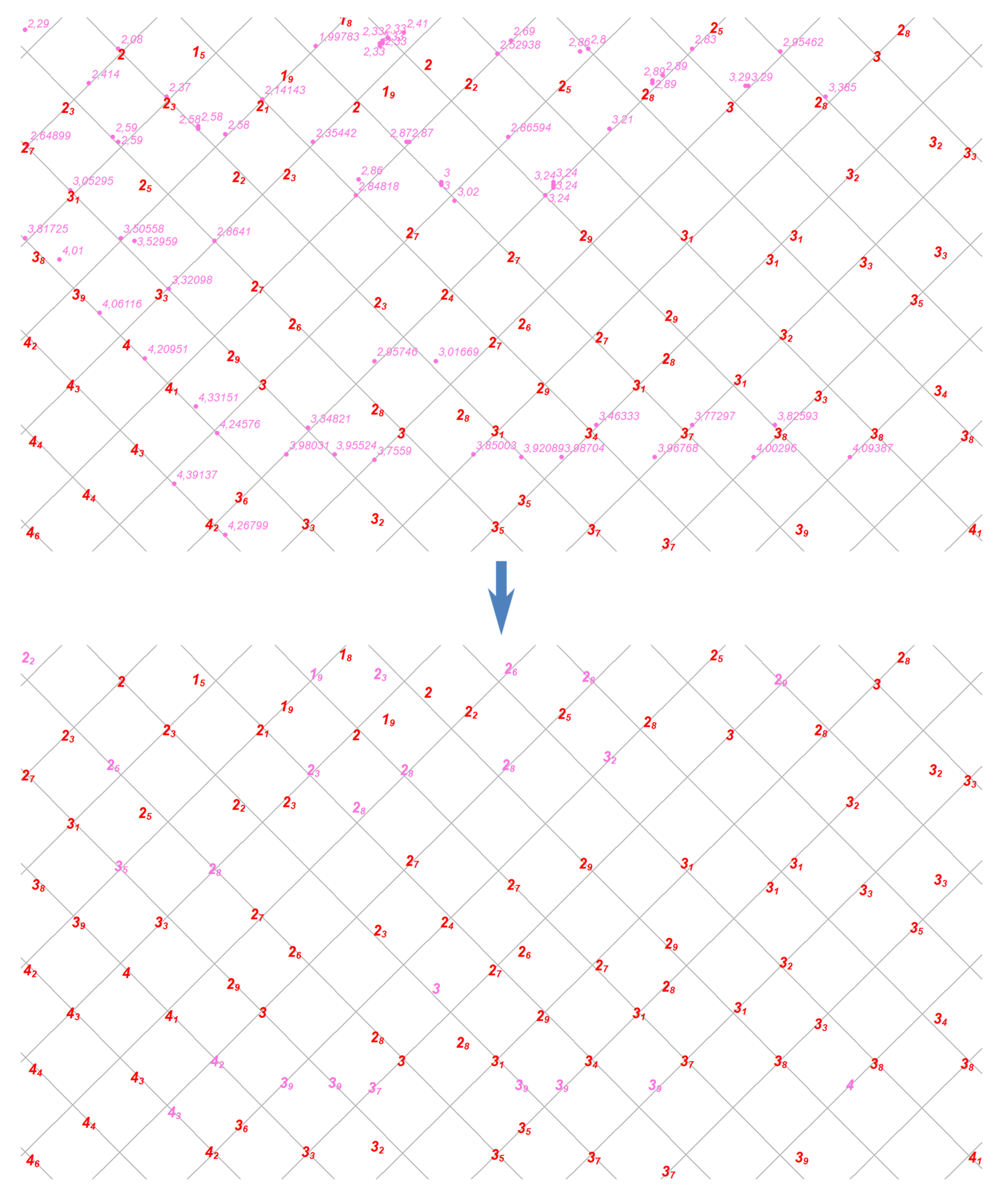
3.2.2. Prime Soundings
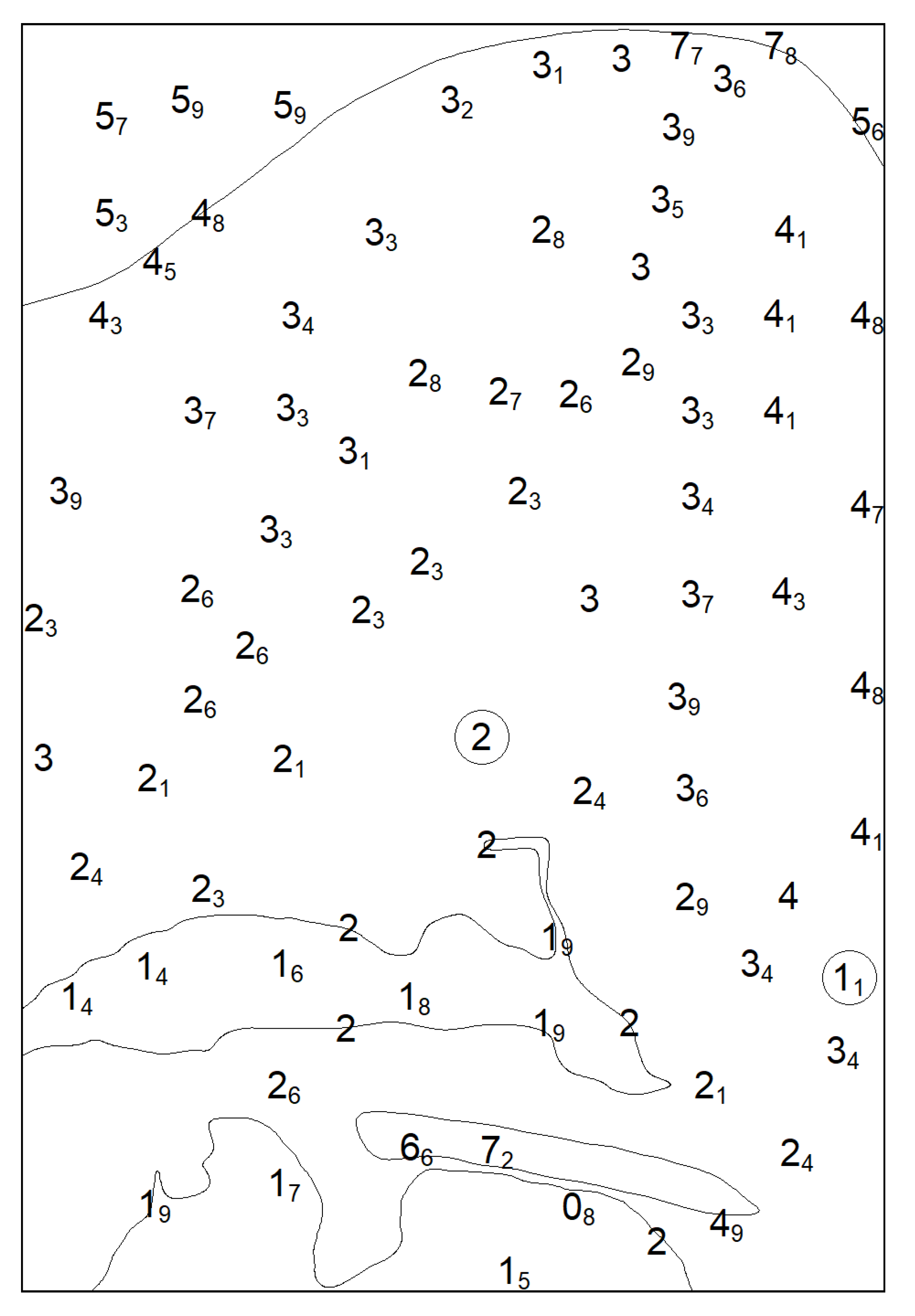
- Shoals (Figure 2) result from the selection of soundings for each fishnet cell with depth values equal to the maximum for each cell (depth values are negative and thus the maximum value is the shallowest) and all the soundings from the fishnet cells where the maximum value is equal to the minimum value (flat cells).
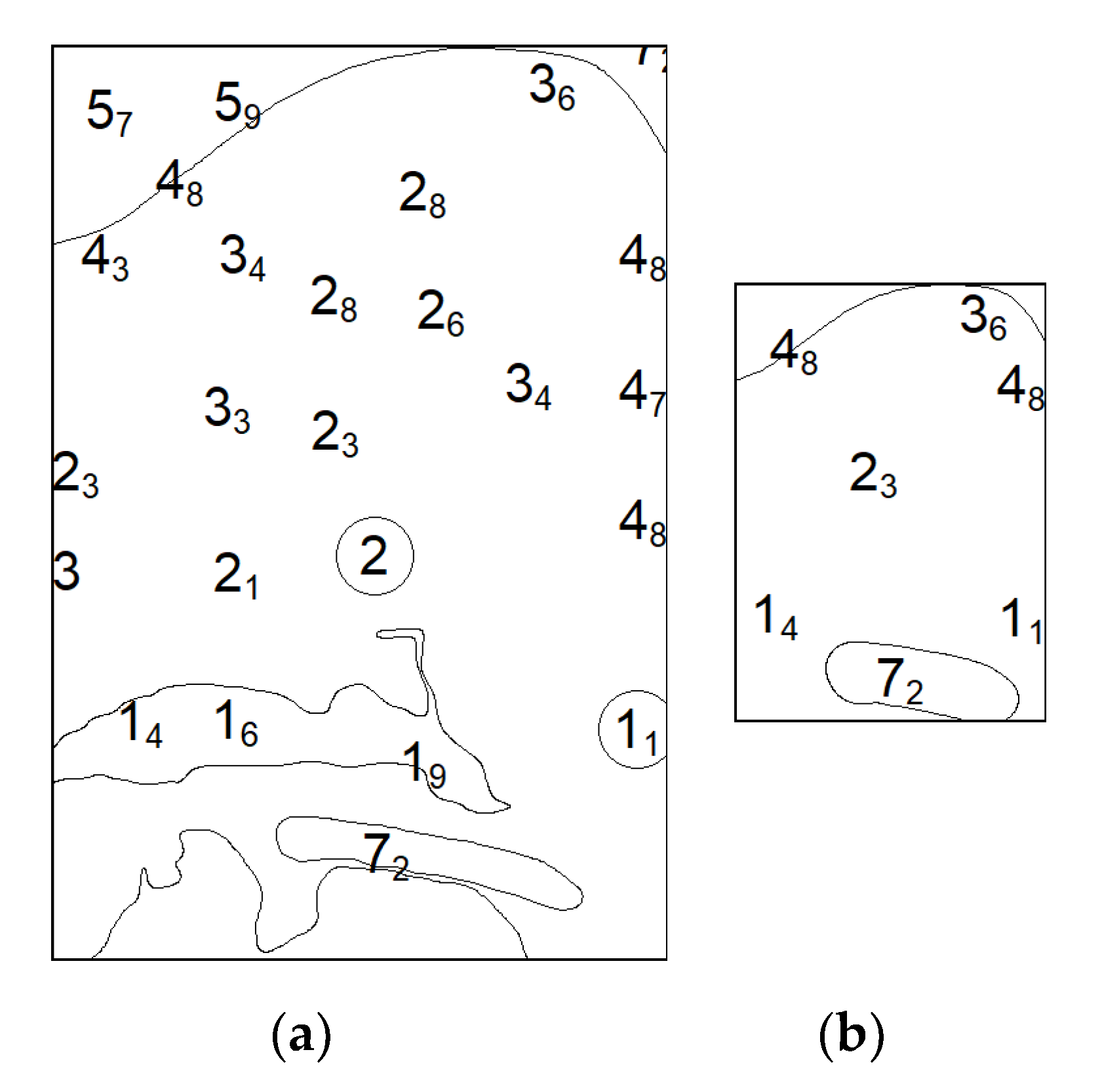
- Deeps (Figure 3) result from the selection of soundings for each fishnet cell with depth values equal to the minimum for each cell (depth values are negative and thus the minimum value is the deepest) and at the same time the maximum value is not equal to the minimum value (flat cells have been already selected in the previous phase). For these soundings, the percentage of the difference in relation to the maximum value (shoal depths) for each fishnet cell is computed. In this first selection phase, Prime Shoal soundings and Prime Deep soundings are identified. Regarding the Prime Shoal soundings, from the already selected shoals, the one closer to each fishnet cell centre is retained. The selected shoal soundings may be too dense. Soundings should have between them distance greater than (or equal to) R, which is equal to half of the fishnet cell size. This condition is violated when soundings resulting from two or more adjacent fishnet cells are too close requiring the examination of the distances between them.
- Selection of soundings with distance between them greater than (or equal to) R;
- Selection of soundings with distance between them shorter than R. Soundings are grouped in clusters of 2, 3 or more, based on the distances between them and their relative position. For each cluster the shoalest is selected. This process results to a subgroup of shoals with distances between them greater than (or equal to) R.
- Selection of soundings with distance between them greater than (or equal to) R;
- Selection of soundings with distance between them smaller than R. Selected soundings are grouped in clusters of 2, 3 or more, based on distances between them and their relative position. For each cluster, the deepest is selected. This process results to a subgroup of deeps with distances between them longer than (or equal to) R.
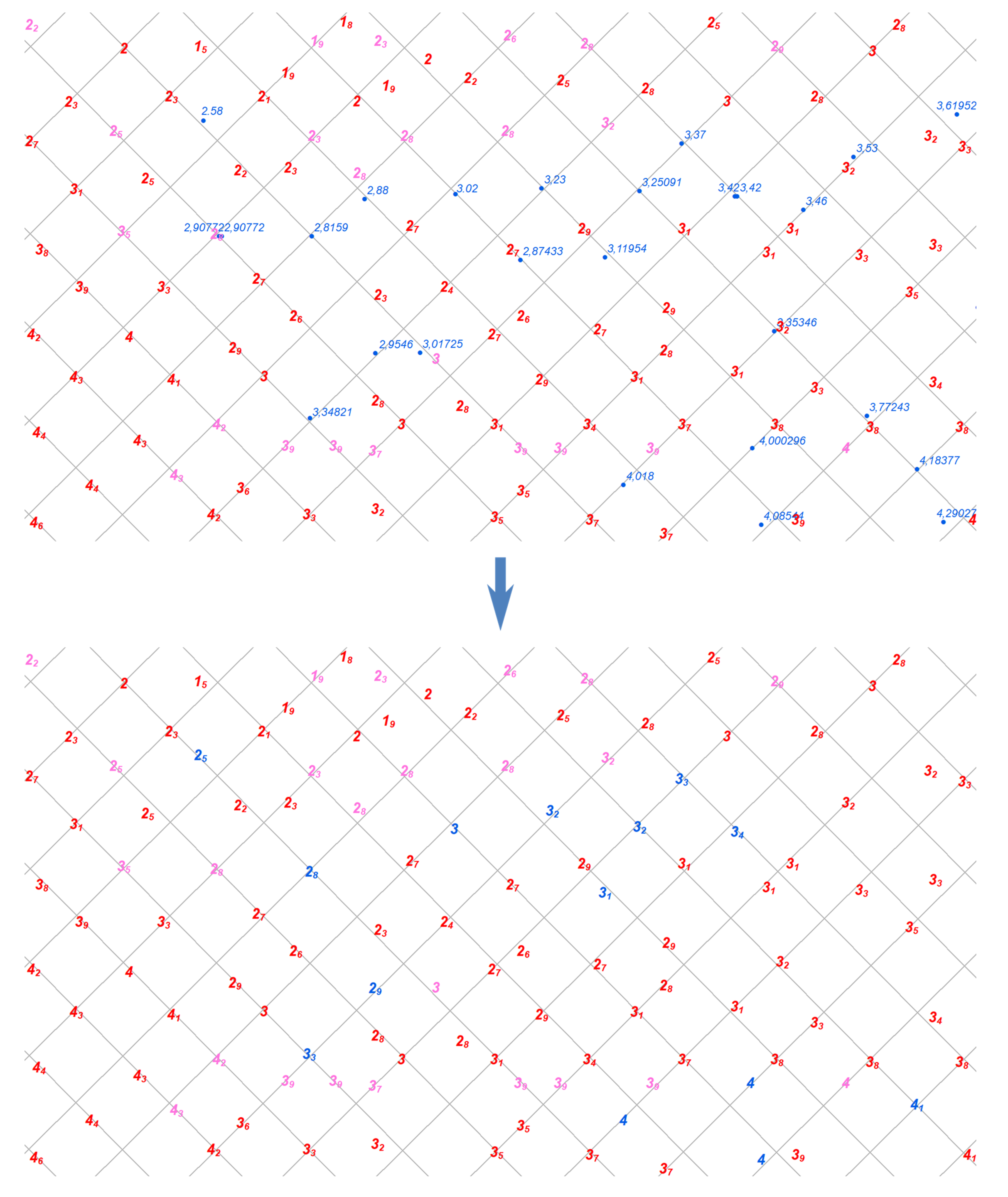
3.2.3. Background Soundings
- Selection of those with distance between them longer than (or equal to) R;
- Selection of those with distance between them smaller than R. Soundings are grouped in clusters of 2, 3 or more, based on distances between them and their relative position. For each cluster, the deepest one is selected. This process results to a subgroup of deeps with distances between them greater than (or equal to) R.
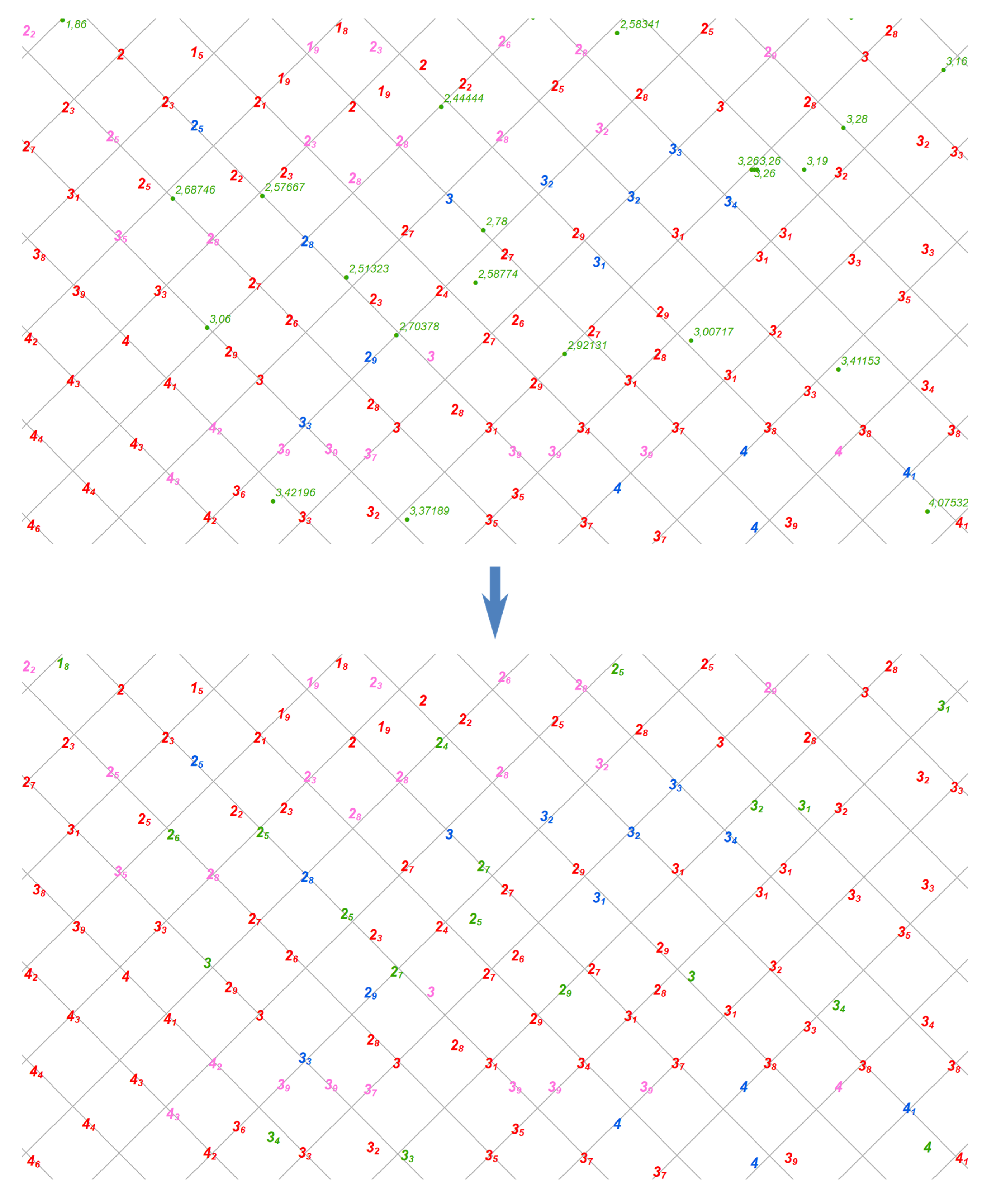
3.2.4. Fill Soundings
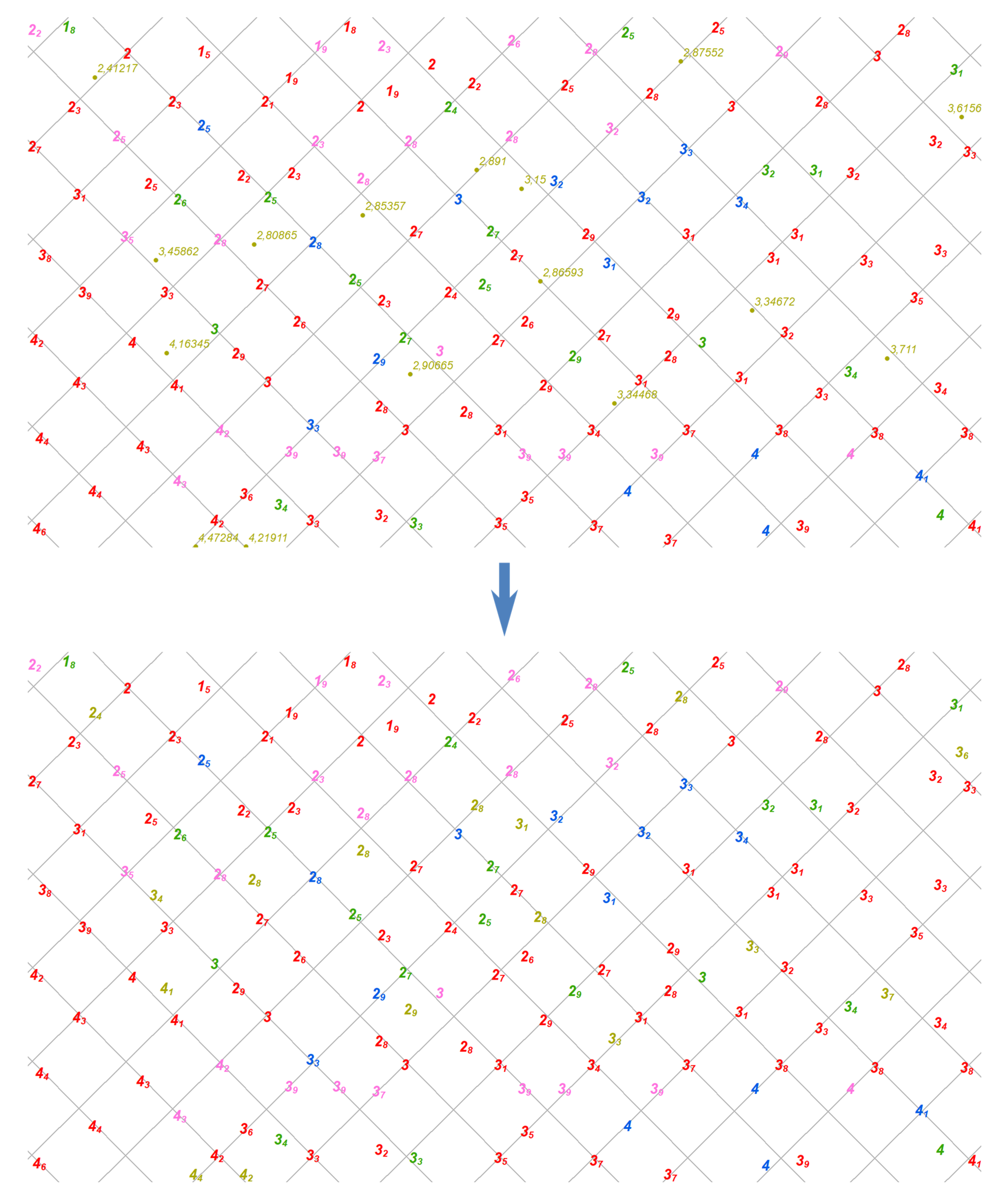
3.2.5. Morphology Related Soundings
4. Results—Case Study
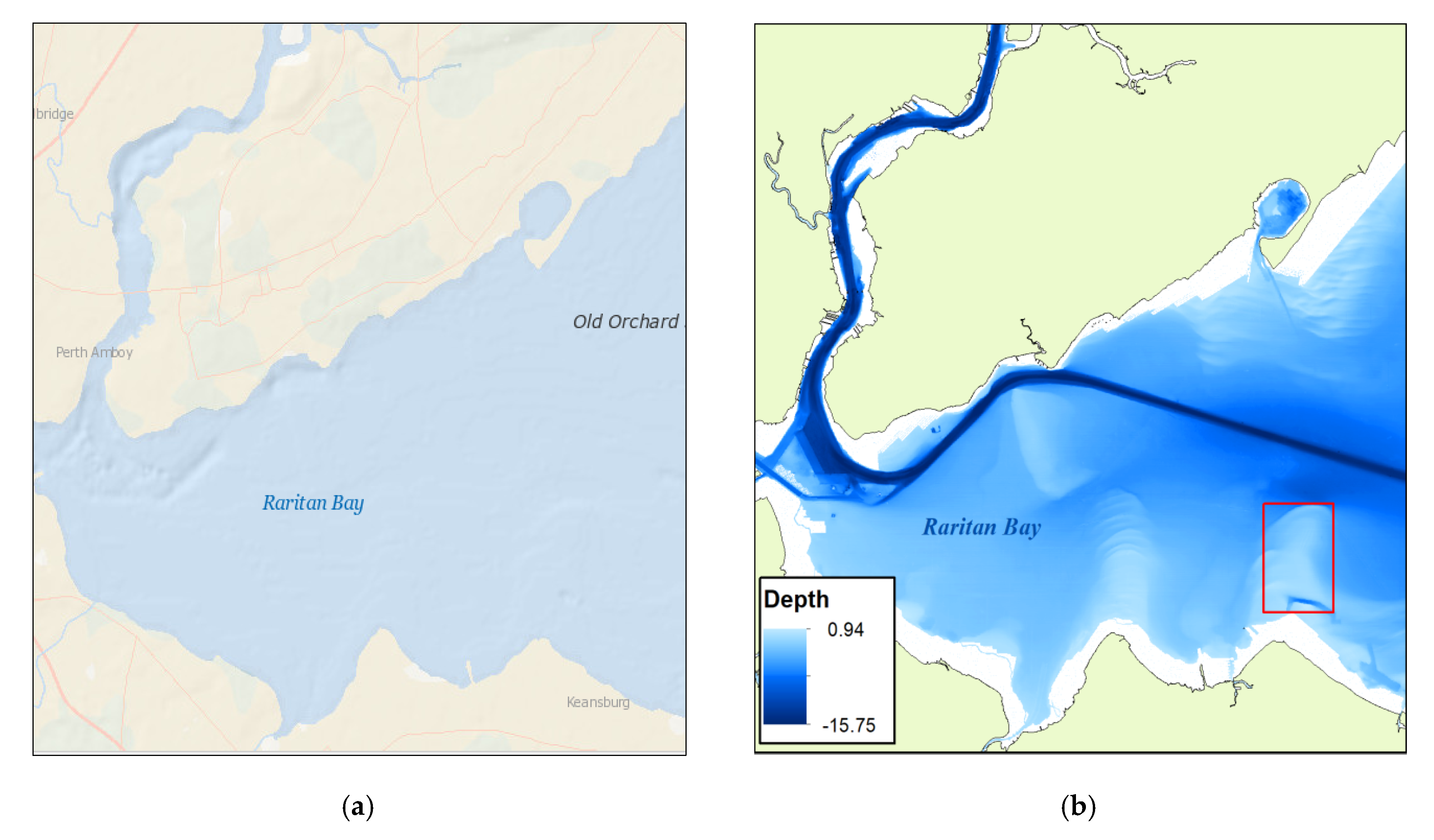
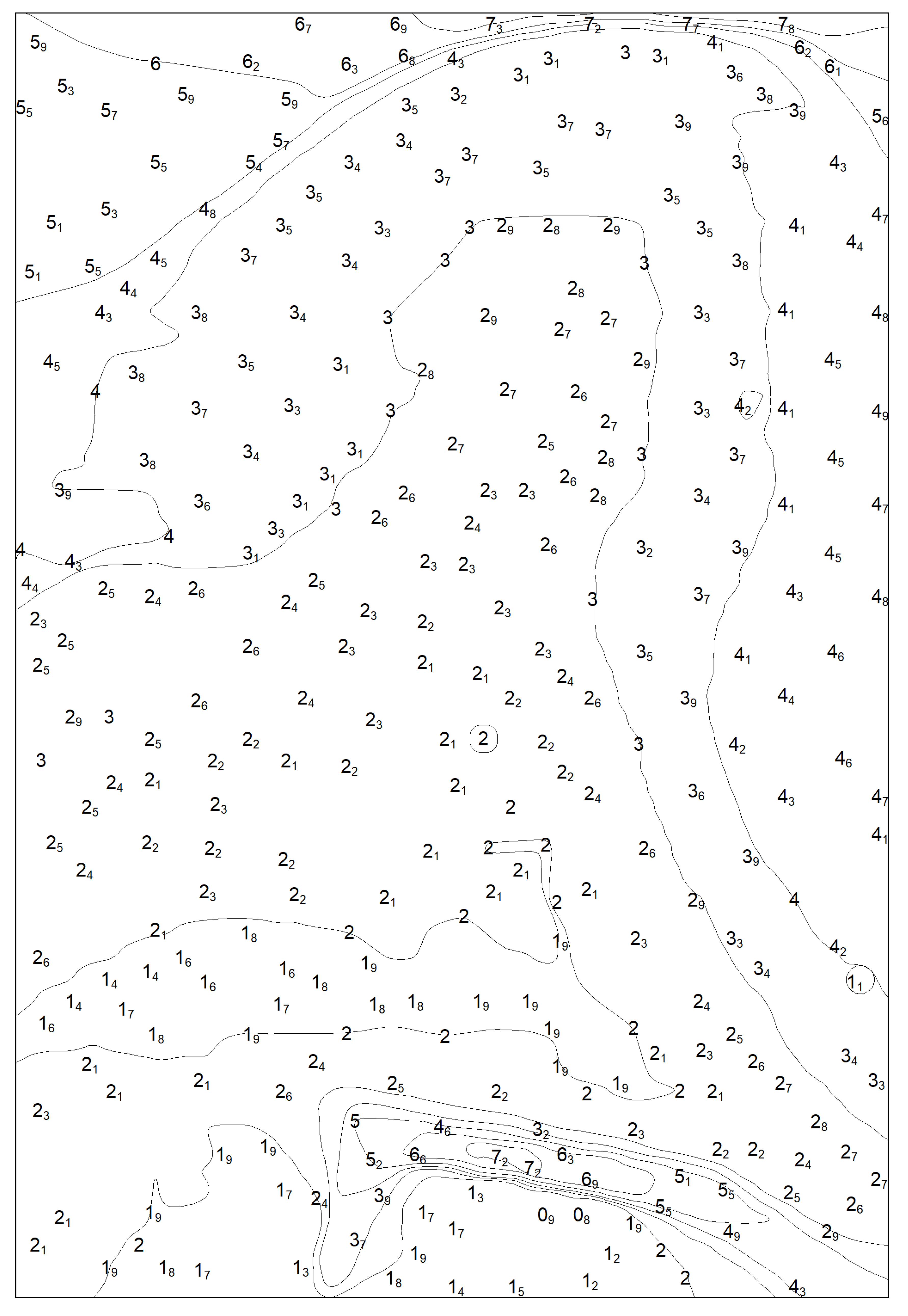
4.1. Study Area and Source Data
4.2. Implementation
- A rhomboidal fishnet with the appropriate cell size is created for each scale and depth area(s);
- Soundings statistics are calculated for each fishnet cell;
- Topological relations between soundings and the fishnet are assessed;
- Adjacency relations and distance between soundings are also computed;
- Soundings management and subgroup selection is carried out.
5. Discussion
- Criteria and constraints: Soundings generalization procedure is based on IHO standards and NOAA’s best practices.
- Soundings classification: The method selects a subset from the soundings at the largest scale product in order to portray Prime, Background, Fill, and Morphology soundings at smaller scales.
- Source: Generalized soundings are typically derived from an elevation source (high-resolution DTM) dataset, or a larger scale chart. Each grid cell of the DTM is converted to a depth point and a generalized sounding dataset is selected at chart scale. The use of a continuous and high density dataset as a source, excludes the possibility of omission of soundings depicting significant seabed features. Moreover, a high resolution DTM is the result of any contemporary bathymetry collection method [21]. Therefore, it is important to adopt soundings generalization methods that can use a DTM as a source.
- Soundings Pattern: The soundings selection method aims to achieve a rhomboidal pattern that is used as a reference for guiding the location of soundings that are candidates for selection. The rhombus cell size can be adjusted for density and location of the soundings with the rhombus size set by the cartographer.
- Ladder approach: The method allows for the compilation of a number of charts at smaller scales based on the ladder approach. Thus, it is ensured that soundings portrayed at the smaller scales are portrayed as well at the larger ones.
- Adjustable to scale and source: The method, as applied from the DTM depth points to the largest scale and from that scale to the smaller chart scale, is scale independent and can be applied successfully to regularly spaced depth points (points from a DTM) and irregularly spaced depth points (soundings from a larger scale nautical chart). As a result, it is appropriate for soundings generalization utilizing a DTM or a larger scale nautical chart as a source.
- Surface structure and depth integrity: Surface structure description is based on depth contours extracted from the DTM and generalized at the chart compilation scale based on nautical chart specifications. Scale specific depth contours are generated by generalizing raw depth contours extracted from the DTM. As a result, surface structure description is scale dependent and contributes to a scale related selection of soundings. Thus, it is superior to other seabed structure description methods, e.g., slope, feature recognition etc. that focus on details not relevant to the map compilation scale. In order to maintain the integrity of the depths, sounding values are depicted within the depth areas defined by the generalized depth contours.
- Ease of implementation: The rules and procedures proposed can be implemented in a GIS environment utilizing geoprocessing functions and custom developed tools. The methodology is based on basic operations used to manipulate geographic data and the Open Geospatial Consortium’s (OGC) simple feature model. Neither special tools nor special structures are needed. Therefore, it can be implemented in any GIS environment and spatially enabled database that provides these tools. This way, “in house” GIS, existing databases and well checked processing routines will not become obsolete. Consequently, the method can be easily adopted by HOs or private mapping companies regardless of the existing chart production procedures.
- Flexibility and Customization: The values of the parameters used, e.g., distance between soundings, fishnet size and depth selection criteria etc. can be set by the cartographer, thus providing a fully parameterized solution. It is considered that a “parametric” approach contributes considerably to the flexibility of the method and accommodates the requirements of different hydrographic institutions.
- Automation: The time required for nautical chart production is significantly reduced as generalization of soundings is automated to a considerable degree. Therefore, the cartographer can focus only on checking the result of the automated procedures to edit a small percentage of possibly missing cases. This way, chart production pace will increase with considerable reduction of the production cost.
Author Contributions
Funding
Conflicts of Interest
References
- IHO (International Hydrographic Organization) S-57 Publication. IHO Transfer Standard for Digital Hydrographic Data, 3.1 ed.; International Hydrographic Organization: Monte Carlo, Monaco, 2000. [Google Scholar]
- IHO (International Hydrographic Organization) S-66 Publication. Facts about Electronic Charts and Carriage Requirement, 1.1.0 ed.; International Hydrographic Organization: Monte Carlo, Monaco, 2018. [Google Scholar]
- NOAA (National Oceanic and Atmospheric Administration). National Charting Plan. A Strategy to Transform Nautical Charting; Office of Coast Survey, Marine Chart Division: Silver Spring, MD, USA, 2017. Available online: https://nauticalcharts.noaa.gov/publications/docs/draft-national-charting-plan.pdf (accessed on 15 October 2020).
- Zhang, X.; Guilbert, E. A multi-agent system approach for feature-driven generalization of isobathymetric line. In Advances in Cartography and GIScience; Springer: Berlin/Heidelberg, Germany, 2011; Volume 1, pp. 477–495. [Google Scholar]
- Zoraster, S.; Bayer, S. Automated Cartographic Sounding Selection. Int. Hydrogr. Rev. 2011, 59, 57–61. [Google Scholar]
- Yan, J.; Guilbert, E.; Saux, E. An ontology of the submarine relief for analysis and representation on nautical charts. Cartogr. J. 2015, 52, 58–66. [Google Scholar] [CrossRef] [Green Version]
- NOAA (National Oceanic and Atmospheric Administration). Nautical Chart Manual; Volume 1—Policies and Procedures; Version 2018.2; U.S. Department of Commerce, Office of Coast Survey: Silver Spring, MD, USA; National Oceanic and Atmospheric Administration: Washington, DC, USA, 2018.
- Owens, E.; Brennan, R. Methods to influence precise automated sounding selection via sounding attribution and depth areas. In Proceedings of the CHC The Arctic, Old Challenges New Approaches, Niagara Falls, ON, Canada, 15–17 May 2012. [Google Scholar]
- Oraas, S.R. Automated Sounding Selection. Int. Hydrogr. Rev. 1975, 52, 103–115. [Google Scholar]
- Tsoulos, L.; Stefanakis, K. Sounding Selection for Nautical Charts: An Expert System Approach. In Proceedings of the 18th International Cartographic Conference, Stockholm, Sweden, 23–27 June 1997. [Google Scholar]
- Du, J.; Lu, Y.; Zhai, J. A Model of Sounding Generalization Based on Recognition of Terrain Features. In Proceedings of the 20th International Cartographic Conference, Beijing, China, 6–10 August 2001. [Google Scholar]
- Solarić, R. Depth Selection in Nautical Charts Production. In Proceedings of the 22nd International Cartographic Conference, A Coruña, Spain, 9–16 July 2005. [Google Scholar]
- Sui, H.; Zhu, X.; Zhang, A. A System for Fast Cartographic Sounding Selection. Mar. Geod. 2005, 28, 159–165. [Google Scholar] [CrossRef]
- Yu, W. Automatic Sounding Generalization in Nautical Chart considering Bathymetry Complexity Variations. Mar. Geod. 2017, 41, 68–85. [Google Scholar] [CrossRef]
- Kastrisios, C.; Calder, B.; Masetti, G.; Holmberg, P. Towards automated validation of charted soundings: Existing tests and limitations. Geo-Spat. Inf. Sci. 2019. [Google Scholar] [CrossRef] [Green Version]
- Lovrinčević, D. The Development of a New Methodology for Automated Sounding Selection on Nautical Charts. NAŠE MORE Znanstveni časopis za more i pomorstvo 2019, 66, 70–77. [Google Scholar] [CrossRef]
- Lovrinčević, D. Quality assessment of an automatic sounding selection process for navigational charts. Cartogr. J. 2017, 54, 139–146. [Google Scholar] [CrossRef]
- Pe’eri, S.; Dyer, Ν. Automated Depth Area Generation for Updating NOAA Nautical Charts. Available online: https://rb.gy/wjfo44 (accessed on 15 October 2020).
- IHO (International Hydrographic Organization). Regulations of the IHO for International (INT) Charts and Chart Specifications of the IHO—Publication S-4 Edition 4.7.0; International Hydrographic Organization: Monte Carlo, Monaco, 2017; p. 452. [Google Scholar]
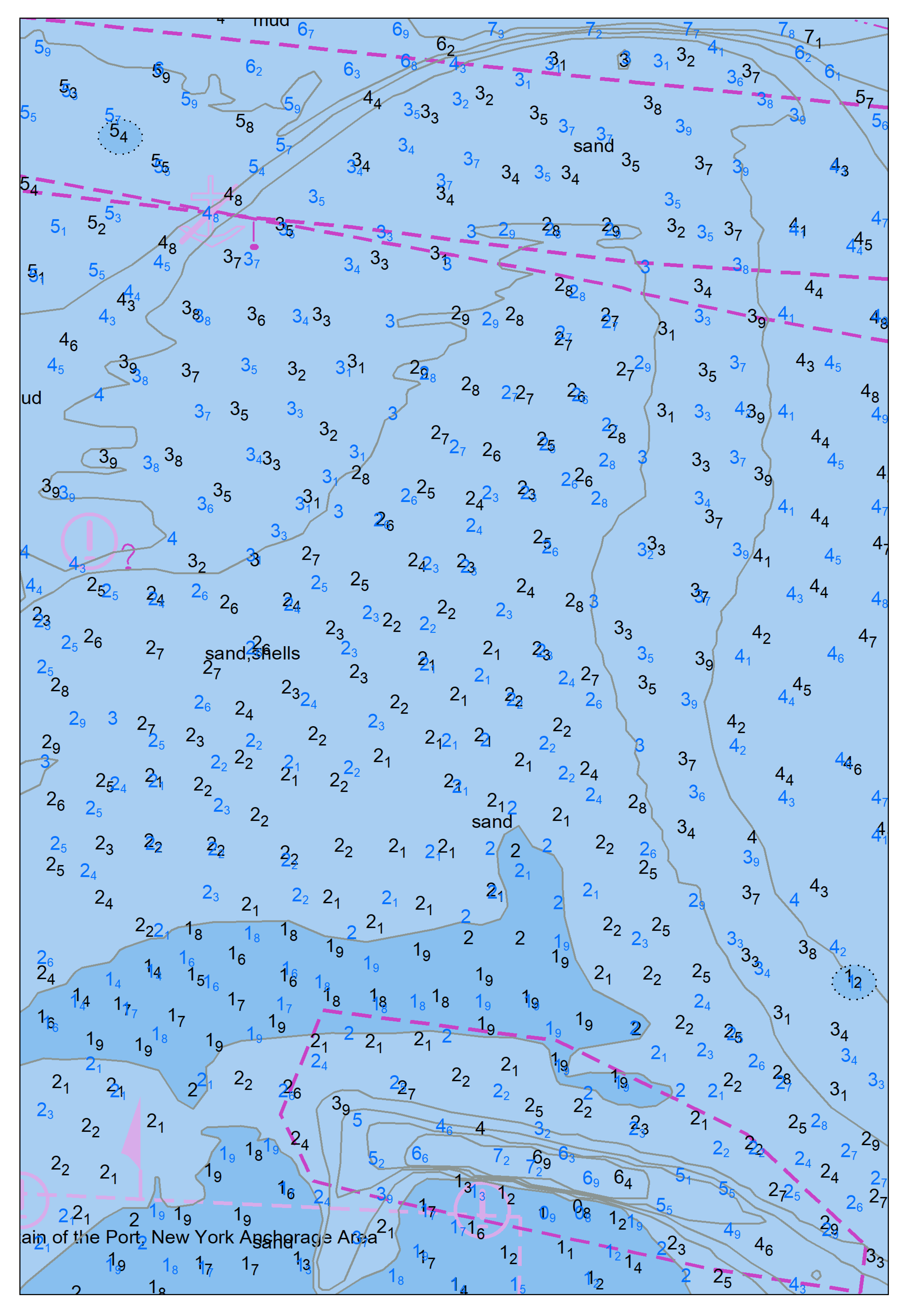
- NOAA Chart 12327. New York Harbor (1:40,000), 109th ed.; NOAA: Silver Spring, MD, USA, 2020.
- Rice, G.; Wyllie, K.; Brennan, R.; Koprowski, C.; Wolfskehl, S.; Burnett, Z. The National Bathymetric Source. In Proceedings of the Canadian Hydrographic Conference 2020, Quebec City, QC, Canada, 24–27 February 2020; Available online: https://hydrography.ca/wp-content/uploads/2020/04/The-National-Bathymetric-Source.pdf (accessed on 15 October 2020).
- IHO (International Hydrographic Organization). Water Level Information for Surface Navigation—Publication S-104 Edition 0.0.3; International Hydrographic Organization: Monte Carlo, Monaco, 2017; p. 41. [Google Scholar]
- IHO (International Hydrographic Organization). Surface Currents Product Specification—Publication S-111 Edition 1.0.0; International Hydrographic Organization: Monte Carlo, Monaco, 2018; p. 108. [Google Scholar]
- Dyer, N.; (U.S. Department of Commerce, NOAA Office of Coast Survey, Washington, DC, USA); Pe’eri, S.; (U.S. Department of Commerce, NOAA, Office of Coast Survey, Washington, DC, USA). Personal Communication, 2020.
- Skoumas, G.; Pfoser, D.; Kyrillidi, A. On Quantifying Qualitative Geospatial Data: A Probabilistic Approach. In Proceedings of the SIGSPATIAL’13: 21st SIGSPATIAL International Conference on Advances in Geographic Information Systems 2013, Orlando, FL, USA, 5–8 November 2013; Available online: https://0-dl-acm-org.brum.beds.ac.uk/doi/10.1145/2534732.2534742 (accessed on 15 October 2020).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Principle | |
|---|---|
| Soundings Classification | Most studies adopt soundings classification and focus on a specific group, e.g., background soundings [5,9,10,13,16] |
| Depth related criteria | The shoalest soundings are selected as well as the deep ones [9,10,11,12,13,14] |
| Auxiliary structures | Triangulated Irregular Network (TIN) or grid sea bed models (DTMs) are utilized [5,10,11,14,16] |
| Pattern in soundings | A regularly spaced pattern (e.g., triangular, rhomboidal) is considered the ideal solution [9,10,11,12,13] |
| Anti-clutter tactics | A circular neighbourhood is used to avoid soundings overlap [3,5] |
| Soundings density | Soundings spacing varies according to depth range and terrain variability [9,10,11,13] |
| Area segmentation | Better processing is achieved through segmentation of the area under examination by the application of depth range zones, contour zones, ocean bottom features or a regular segmentation (e.g., rectangular grid) [5,11,14] |
| Depth Range (m) | Min Separation (cm) | Max Separation (cm) |
|---|---|---|
| 0–10 | 1.00 | 1.25 |
| 11–25 | 1.25 | 1.50 |
| 26–75 | 1.50 | 2.00 |
| >75 | 2.00 | 2.50 |
| Scale | Rhombus Cell Size (m) | R (m) |
|---|---|---|
| 1:10 K | 125 | 62.5 |
| 1:20 K | 250 | 125 |
| 1:40 K | 500 | 250 |
| 1:80 K | 1000 | 500 |
| Number of Soundings | |||||||
|---|---|---|---|---|---|---|---|
| Data Set | Min Distance (m) | Max Distance (m) | All | Excluding Dredged Area | Depth Range 0–10 m | Depth Range 10–25 m | Remaining (%) |
| Source (DTM) | 5 | 5 | 4,039,154 | 3,786,784 | 3,727,258 | 59,526 | |
| 10 K Scale | 62.5 | 75 | 9172 | 8949 | 223 | ||
| 20 K Scale | 125 | 150 | 2478 | 2429 | 49 | 27.0 | |
| 40 K Scale | 250 | 300 | 713 | 696 | 17 | 27.1 | |
| 80 K Scale | 500 | 600 | 211 | 209 | 2 | 29.6 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skopeliti, A.; Stamou, L.; Tsoulos, L.; Pe’eri, S. Generalization of Soundings across Scales: From DTM to Harbour and Approach Nautical Charts. ISPRS Int. J. Geo-Inf. 2020, 9, 693. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9110693
Skopeliti A, Stamou L, Tsoulos L, Pe’eri S. Generalization of Soundings across Scales: From DTM to Harbour and Approach Nautical Charts. ISPRS International Journal of Geo-Information. 2020; 9(11):693. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9110693
Chicago/Turabian StyleSkopeliti, Andriani, Leda Stamou, Lysandros Tsoulos, and Shachak Pe’eri. 2020. "Generalization of Soundings across Scales: From DTM to Harbour and Approach Nautical Charts" ISPRS International Journal of Geo-Information 9, no. 11: 693. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9110693