1. Introduction
High-speed railway construction is a system-based project that includes many complex construction processes and usually requires a low-cost, high-quality, and short-duration construction period with adequate safety. Construction scheme development can be very difficult due to the complicated construction process and variability of methods, especially for specific geographical and geological conditions. Construction process simulation is very helpful for determining the best construction scheme by visualizing the construction process, presenting complex and dynamic spatiotemporal relationships among construction links, providing intuitive expressions and analyses of construction schemes, and effectively assessing the safety of the construction process. A good simulation can be the key to improving construction efficiency and construction quality.
According to construction simulations, a real construction process can be simulated in the virtual world, and problems that can occur in actual construction can be discovered in advance [
1]. The existing construction simulation methods usually use three-dimensional surface models or BIMs (building information models) for the simple analysis and visualization of collision detection and virtual assembly [
2,
3,
4,
5,
6]. Such methods only focus on the construction and assembly process of railway components and ignore the global relations among construction equipment and the surrounding geographical environment. The construction methods of railways are strongly influenced by environmental factors such as the terrain, geology, hydrology, weather, and traffic. Therefore, appropriately considering information associated with the surrounding environment and the spatio-temporal relations between actual construction processes and the surrounding area is the key to precise and scientific construction simulations. Three-dimensional geographic information system (3D GIS) has the characteristics of multi-source heterogeneous data fusion, mass quantity management and display, spatial analysis, etc., so it provides a very good basic platform for construction simulation [
7,
8].
Virtual geographic environments (VGEs) describe real geographic objects using dynamic spatio-temporal data, thereby enabling experiments and analyses in the virtual space with a true spatiotemporal context [
9,
10,
11,
12,
13,
14,
15,
16]. The construction environment [
17], which is constructed in virtual geographic space, can not only reflect static objects such as construction sites and buildings but also reflect spatial information such as geographic locations and dynamic spatial relationships, including factors related to terrain filling, construction convenience, and construction processes. Currently, construction simulations in VGEs are mainly used to combine numerical simulations and scene simulations [
18,
19,
20], and most methods focus on the visual display of the results of simulation models. Additionally, some studies have investigated the construction process based on real-time monitoring data [
21,
22]. This simulation method employs mathematical models and presents the data in terms of visualization; however, only technological processes and the guidance plan can be reflected, and the specific method used in the construction process is not considered. Hiam M. Khoury et al. [
23,
24,
25,
26,
27] performed in-depth research on construction simulation, although most of the work was based on simulation software, and the impact of the geographical environment was rarely considered. In the field of railway engineering, simulations in VGEs are mainly applied for three-dimensional performance simulations of coupled system dynamics [
28,
29,
30], line selection [
27,
31,
32,
33], run simulation [
34] virtual driving [
35], and similar processes; notably, few simulations have focused on railway construction or verified the effectiveness of the construction method to support construction scheme programming. Therefore, it is necessary to develop an accurate simulation method to simulate the dynamic construction process of complex engineering projects.
This paper presents a dynamic construction simulation method in a VGE that can reflect the construction process of high-speed railways and depict the complex spatio-temporal relationships between construction elements and the surrounding environment. First, the three-dimensional models of a railway and construction equipment are decomposed at the component level, and then repositioned and assembled in the virtual scene. Then, a construction time sequence simulation is performed by changing the visibility of the model components according to the construction standards. A construction process video can be automatically generated, and the viewpoint can be adjusted according to the project progress. Finally, for a specific complex local construction process, a joint linkage mechanical model is developed to flexibly simulate the dynamic working process of construction machinery.
2. Methodology
2.1. Construction Process Simulation Framework Based on a Virtual Geographic Environment
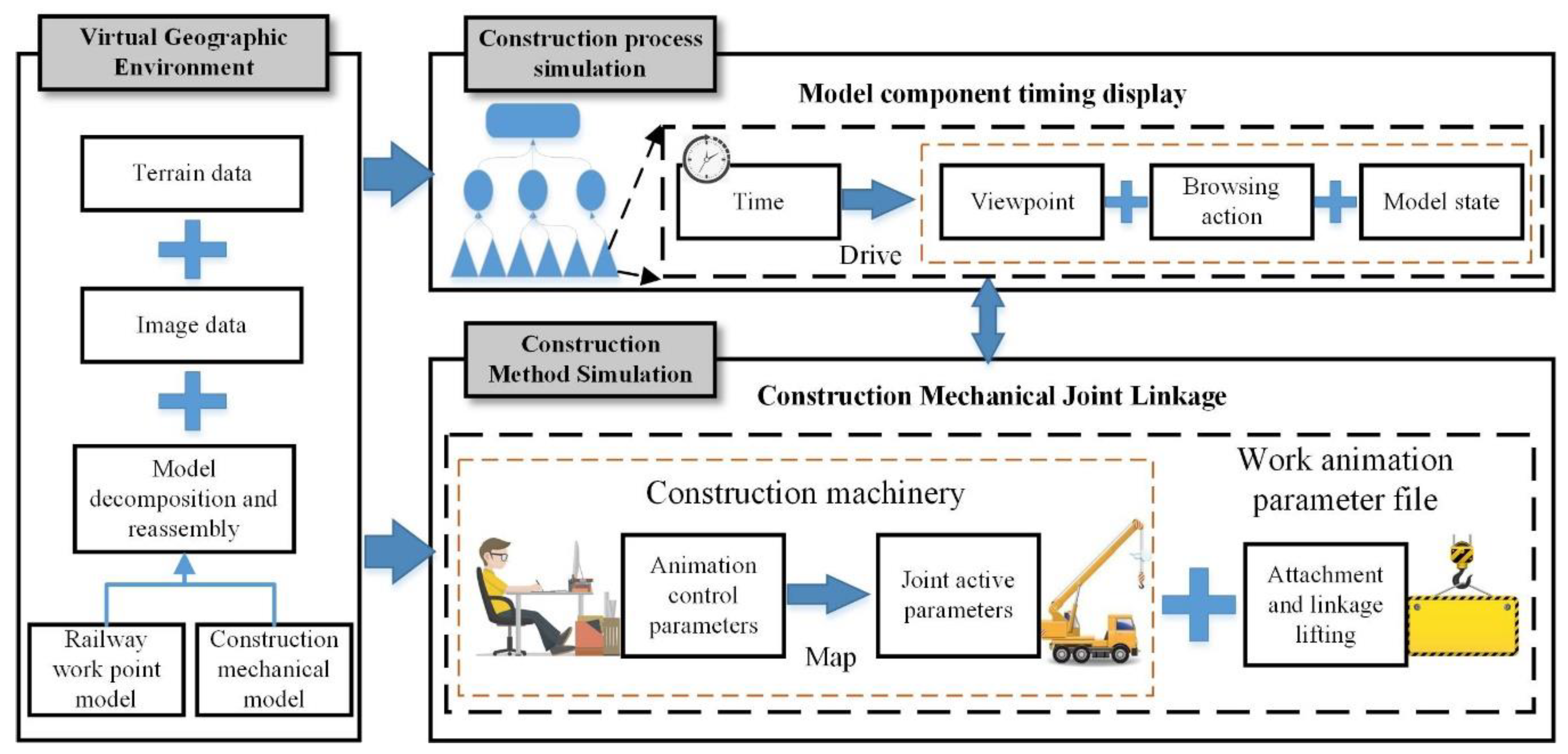
Figure 1 illustrates a dynamic construction simulation framework based on VGEs, a dynamic 3D spatial information system that provides at unified digital framework of the whole railway environment, which is represented by both macro geographic and geological environments and micro railway facilities; this framework mainly includes the following three key technical components.
(1) A high-precision VGE is generated based on model decomposition and reassembly. The VGE provides a basic display environment and an information-bearing framework for construction simulation, and it is formed from the fusion of multisource data, such as digital elevation model (DEM) data, digital orthophoto map (DOM) data, and three-dimensional model data. To dynamically simulate the construction process, a three-dimensional model must be decomposed according to the construction requirements, and then the decomposed model is reassembled in a virtual geographic scene. Models are organized and related in the scene based on semantic information. This process mainly includes the decomposition of railway work points and the construction of mechanical models. Model decomposition is the focus of process and engineering simulations.
(2) Model components are displayed in chronological order for construction process simulation. Process simulations roughly show the overall flow of construction at the macro level. All the construction processes are decomposed into a plurality of subprocesses, and each subprocess is further disassembled into a plurality of construction steps. Each subprocess corresponds to a playlist, and each construction step corresponds to a key frame in the three-dimensional scene. In the playlist, the viewpoint parameters, the action parameters, and the model parameters are driven by time parameters so that the actions are shown sequentially in time. At this point, the simulation of construction processes is complete.
(3) The construction method is simulated based on the joint linkage of construction machinery. A simulation is used to represent the construction method for local and complex work points. According to the construction method, local and complex work points are specifically displayed, and the user-oriented animation control parameters are mapped to mechanical joint activity parameters so that the operation of the construction machinery is effectively simulated. Moreover, the lifting object attachment parameters are added, and a work animation parameter file is jointly formed. At this point, the simulation of the construction method is complete. In addition, a work process simulation with a partial set of work points is usually integrated into the simulation process, and the methods are combined to complete the entire construction simulation process.
2.2. Virtual Geo-Environment Generation Based on Model Decomposition and Reassembly
2.2.1. Model Component-Level Decomposition
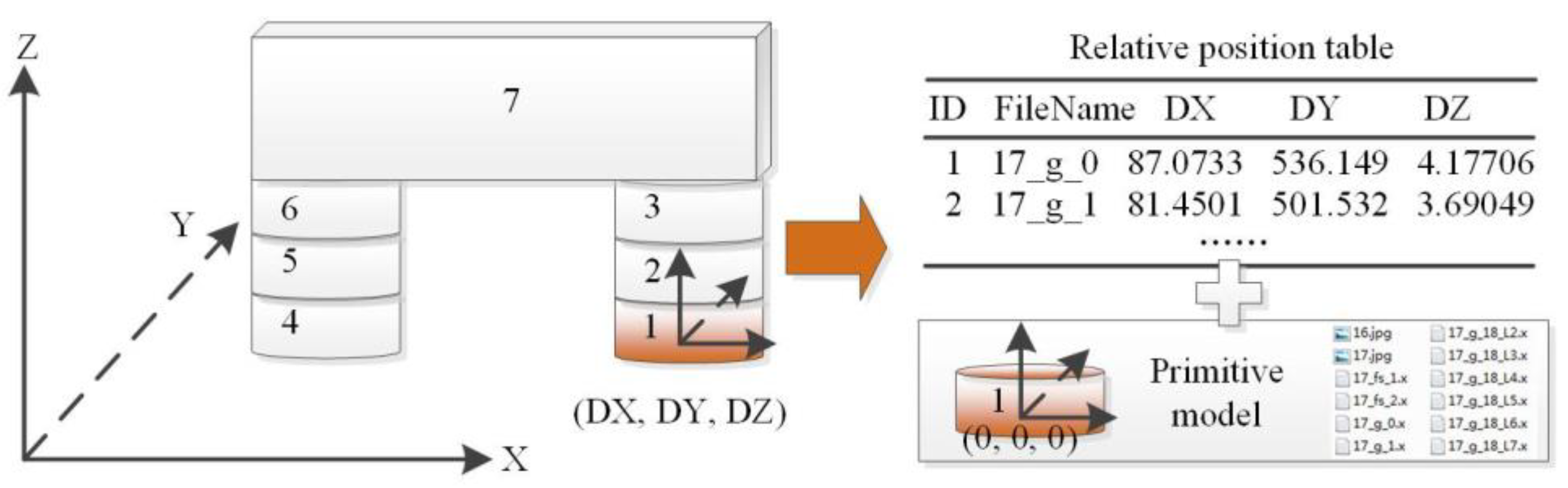
To simulate the construction process, the railway work point models and construction mechanical models need to be broken down into components and reassembled. This process mainly includes decomposition. Then, reassembly can be completed only by determining the adhesion relations among components. The railway engineering point model needs to recalculate the position information for each component after decomposition to perform reassembly in a three-dimensional scene.
As shown in
Figure 2, each model is traversed, and each leaf node element in the model can be extracted as a model component object. Every model component should be stored as a single file and has a unique coordinate system, and the transfer variables are recorded in the transfer table. In this approach, the decomposed model file can be repositioned and reassembled according to the construction process in three-dimensional platform software. Thus, component-level model management and display control can be achieved.
2.2.2. Model Reassembly
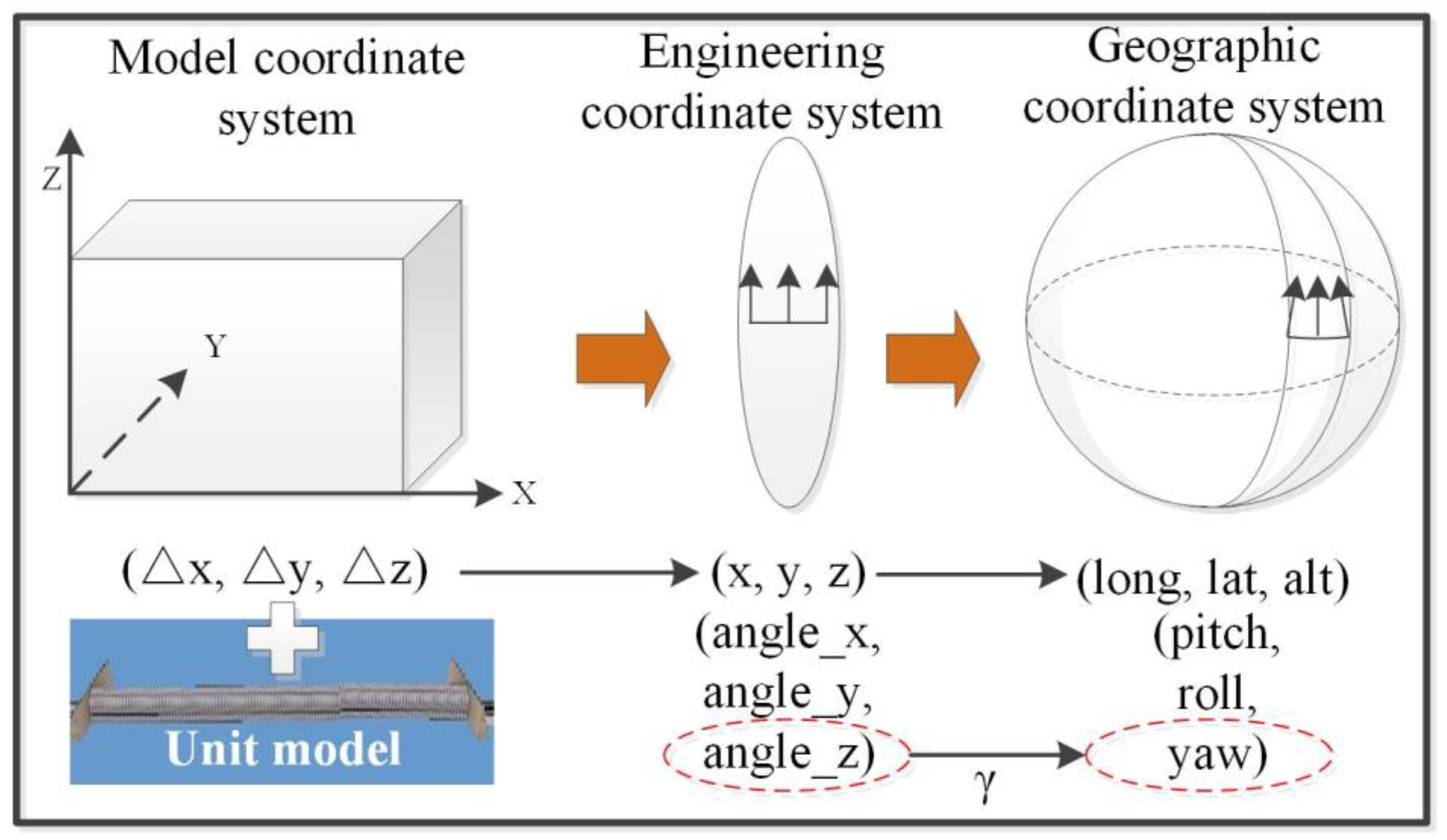
When the component model is reassembled and derived, the relative position relations between the components and the model origin under the model coordinate system are required. To achieve accurate positioning, the insertion point coordinates and attitude parameters of the model need to be specified in a three-dimensional scene. Therefore, the relative coordinates in the model coordinate system need to be converted into absolute coordinates in the spatial coordinate system. The main steps of coordinate system conversion are shown in the
Figure 3, and the specific description is as follows.
(1) Model coordinate system to engineering coordinate system. Using the engineering coordinate system from the railway design and construction phase, the position and attitude of the body model in the engineering coordinate system can be obtained from the line design data and model geometry [
27,
30,
31,
32]. According to the position and posture information associated with the body model in the engineering coordinate system and the relative position data in the assembled relation table, the reassembly coordinates of the subcomponents in the engineering coordinate system can be obtained through position translation and attitude rotation.
(2) Engineering coordinate system to geographic coordinate system. The engineering coordinate system is typically a plane rectangular coordinate system after projection, and a geographic coordinate system needs to be used to display a railway three-dimensional scene that is long and has a large span. Reassembling the model in different projected coordinate systems requires calculating the model position, reprojecting, and calculating the projected azimuth correction value, that is, the meridian convergence angle correction. Notably, a Gaussian projection is for a vector, and components farther away from the central meridian show greater azimuth deviation. The calculation method for the approximation of the deviation angle correction value is shown in Formula (1).
where
γ is the meridian convergence angle correction value, Δ
L is the longitudinal difference between the coordinate position point and the central meridian, and
B is the latitude of the position.
In railway engineering, where the height difference is not large, the engineering coordinate system range is generally less than 40 km and the azimuth deviation is less than 0.2 degrees.
2.2.3. Virtual Geographic Environment Generation
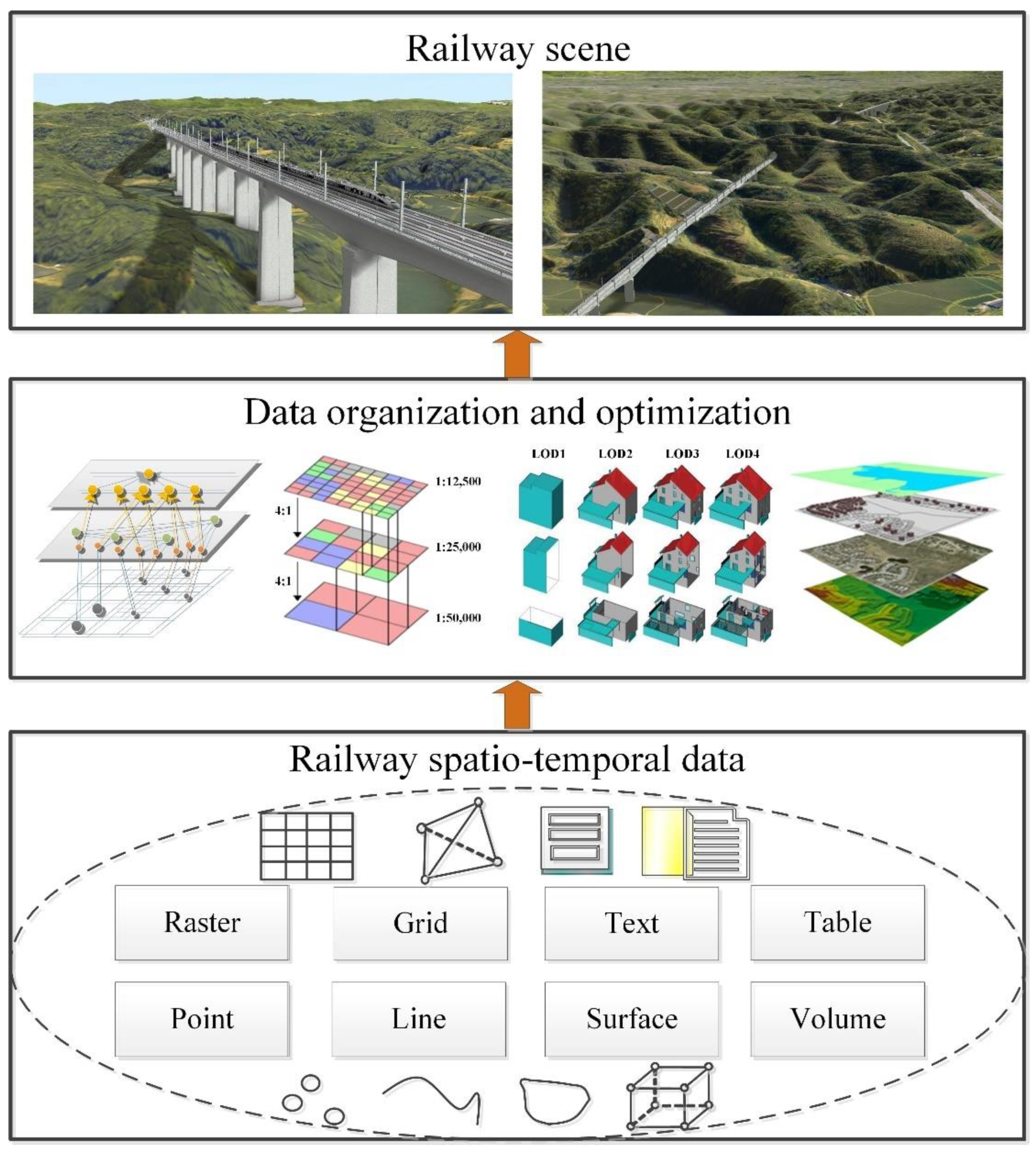
Figure 4 illustrates the generation process of a railway VGE, including multimodal spatio-temporal data fusion, data organization, and optimization. Since the construction methods of railway three-dimensional scenes are relatively mature [
12,
36,
37,
38,
39], only a brief description is given here.
(1) Multimodal spatio-temporal data fusion. A railway three-dimensional scene mainly involves multisource heterogeneous data, such as DEM, DOM, three-dimensional model, line vector, text annotation, and attribute table data. Since a railway line is strip shaped, the terrain and features along the railway line use high-resolution data, and low-resolution data are used when the railway line is far away. The low-resolution below 1 m DOM uses satellite images, the high-resolution above 0.5 m DOM uses aviation photography images, the low-resolution below 20 m DEM uses shuttle radar topography mission (SRTM) data, and the high-resolution below 0.5 m DEM uses lidar data. To demonstrate the construction process, it is necessary to split the corresponding three-dimensional model, such as a body model (e.g., for a bridge) or mechanical model (e.g., for a tower crane), into many subcomponents. The line vector data record mileage information and can be used for rapid positioning according to the mileage data. The character annotations can be used to mark information in the three-dimensional scene, and the actions in the construction simulation process can be prompted. The attribute data record the model name, ID, spatial position, spatial pose, zoom, and other information.
(2) Data organization and optimization. The three-dimensional scene data are multisource and multi-format data in large data sets, and the data need to be organized and optimized to improve the efficiency of data browsing and access. The DEM and DOM are organized in a tiled way and managed in layers. The three-dimensional model can be optimized by setting a maximum visible distance, a minimum visible distance, levels of detail (LOD), and other parameters. The three-dimensional models are organized and related in the scene based on semantic information which is extended and defined based on the international framework for dictionaries (IFD) standard issued by the buildingSMART organization. Semantic information is described, stored, and exchanged through metadata. Considering the decomposition of the three-dimensional model of a construction site, the body model is managed as a parent node, and each component model is managed as a child node in a three-dimensional scene.
(3) Virtual geographic environment generation. The multimodal spatio-temporal data are unified to the same spatio-temporal reference, and the railway three-dimensional scene is generated. The three-dimensional model is loaded into the scene in the form of three-dimensional point symbols.
2.3. Construction Process Simulation Based on Model Component Timing Display
High-speed railway construction technologies and methods are complicated. Three-dimensional models are disassembled into small parts, and the processes used to display and hide small parts are controlled according to different time points, durations, and other time information, thus simulating the construction process, that is, a construction process simulation based on the time series display of the model parts.
2.3.1. Construction Process Decomposition
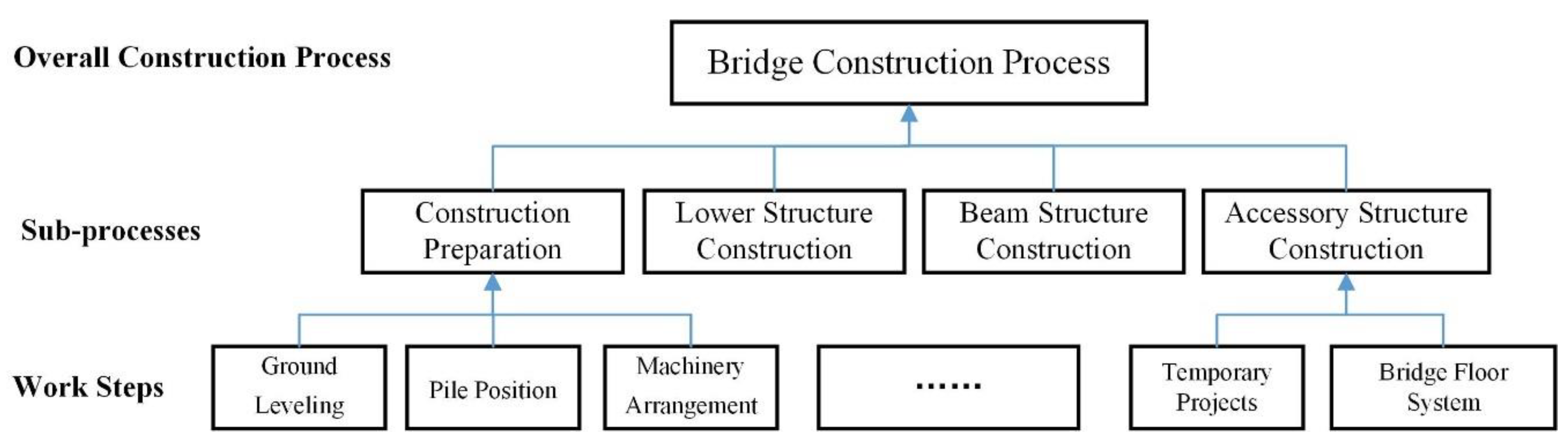
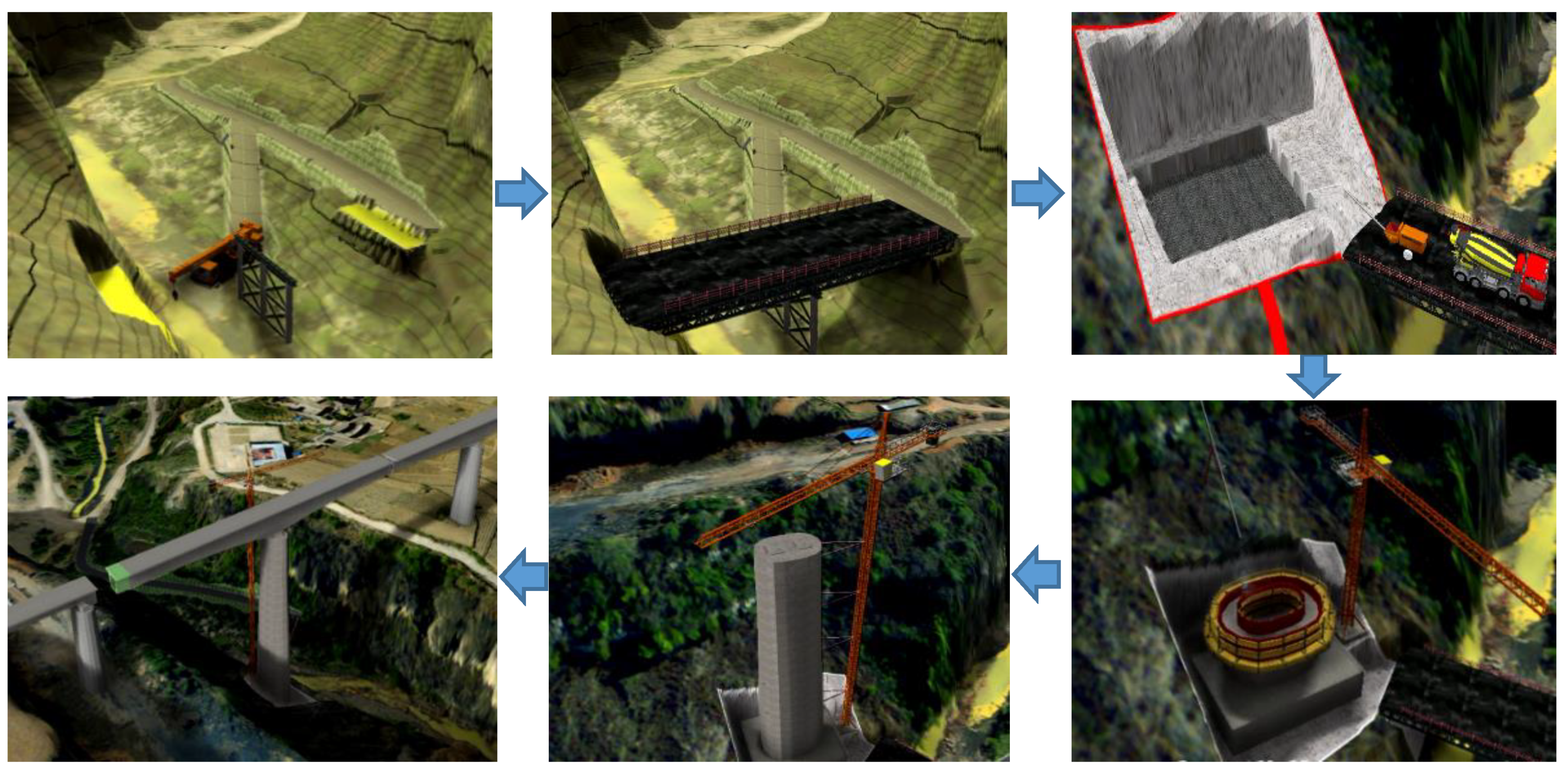
In the construction process simulation, the overall construction process is split from top to bottom, and decomposed into several subprocesses; then, each subprocess is further divided until each detailed action is split. In this context, the entire process of bridge construction can be decomposed into four parts: construction preparation, lower structure construction, beam structure construction, and accessory structure construction, as shown in
Figure 5. Each part can be further divided into a number of construction work steps, and each work step ultimately corresponds to a frame image in the three-dimensional scene. For example, the construction preparation stage can be further divided into ground levelling, pile positioning, machinery arrangement, and other tasks.
2.3.2. Construction Process Simulation
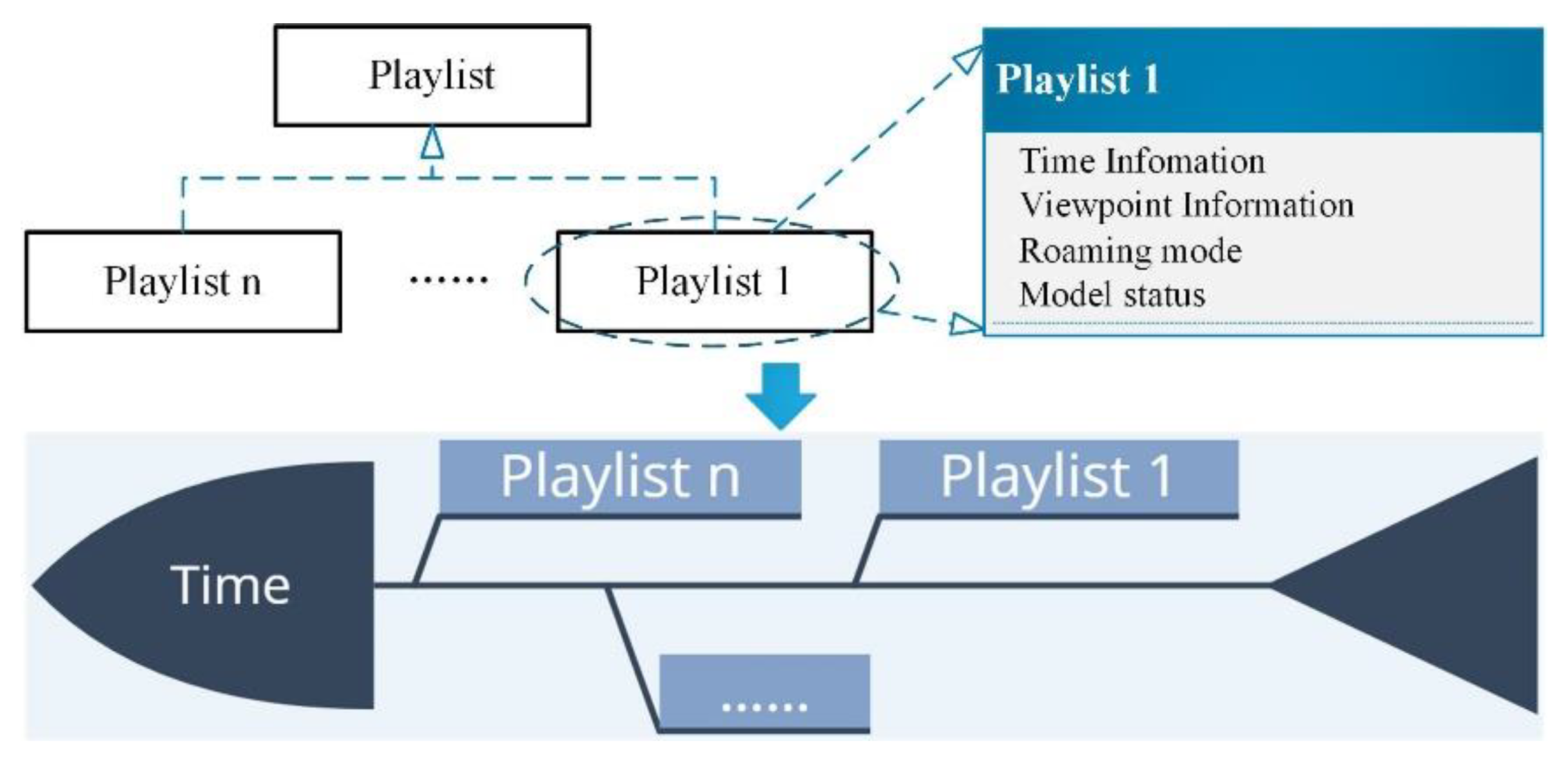
Each construction process is stored with a playlist. Because playlists can be nested, subprocesses can also be stored in playlists. Time information, viewpoint information, browsing actions, and model states are stored in the sub-playlists. The time information is the most important information because it influences the duration of a certain action at a certain point in time. Potential actions could include moving the viewpoint, displaying and hiding parts of the model. The information in the playlist is sequentially processed according to the time information, and the subprocesses are implemented. When all sublists have been addressed, the overall process simulation is formed, as shown in
Figure 6.
2.4. Construction Method Simulation Based on Mechanical Joint Linkage
Most construction methods require special construction machinery. The animated simulation of construction machinery is an advanced expression of virtual construction, and the complete construction process can be simulated directly to identify construction difficulties and priorities. Mechanical simulations of construction processes involve complex mechanical joint control and linkage strategies, the transfer relationships among types of machinery, materials, and the surrounding environment, and the spatial relationships among construction machinery. A joint linkage involves two or more independent joints that are simultaneously active in different planes to co-complete an action. Through the relative positioning of model components (associated with a parent), after multilevel coordinate conversion, the position and attitude parameters of the component model in the three-dimensional scene can be obtained, and component positioning and assembly can be achieved. Since the joints are adjacent to each other, when creating a joint animation, the relative relationship between the component and the parent may be considered only with respect to the method of relative positioning. The following steps are used in construction simulations based on joint linkages.
2.4.1. Extraction of Mechanical Joint Activity Parameters
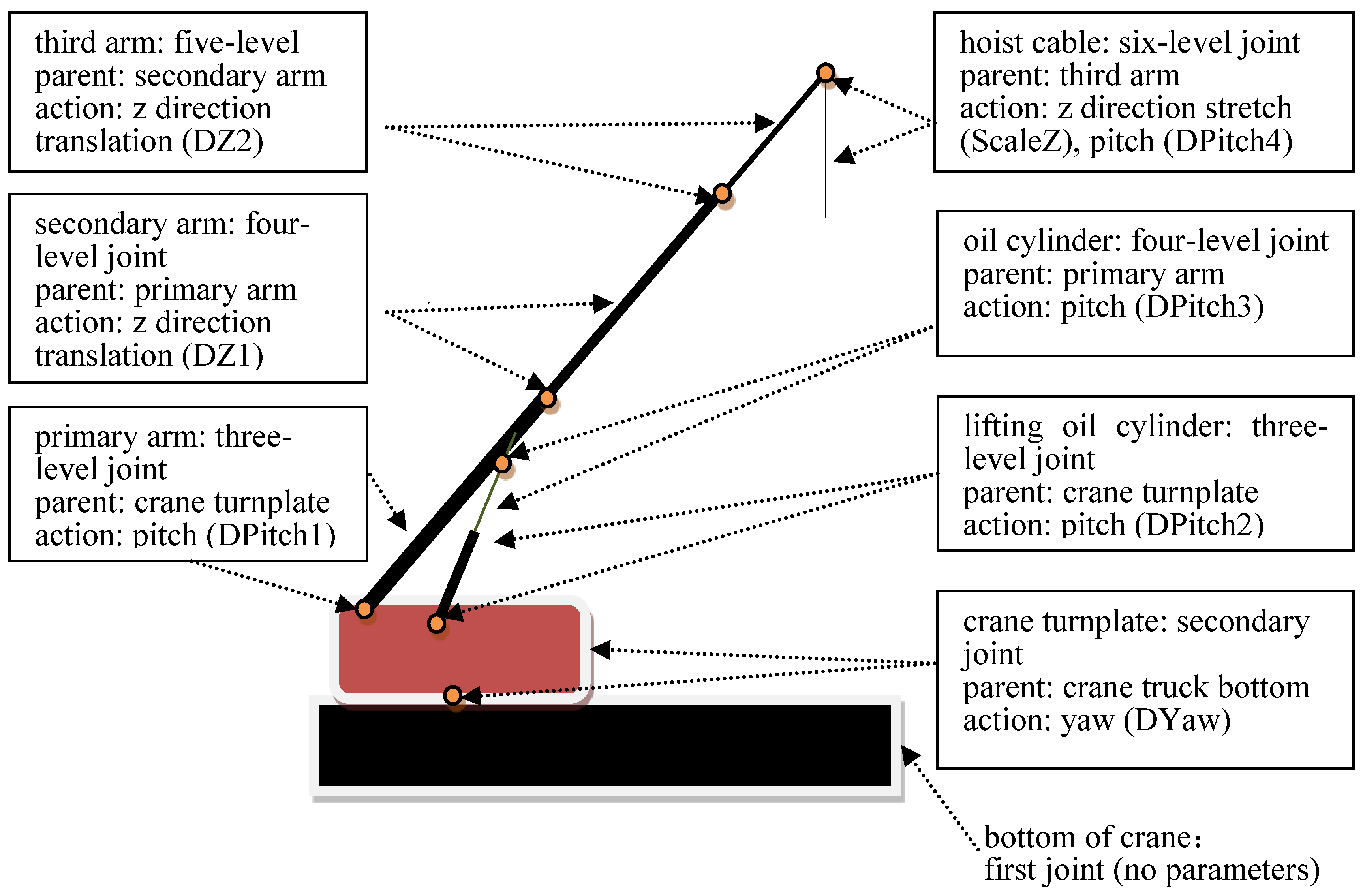
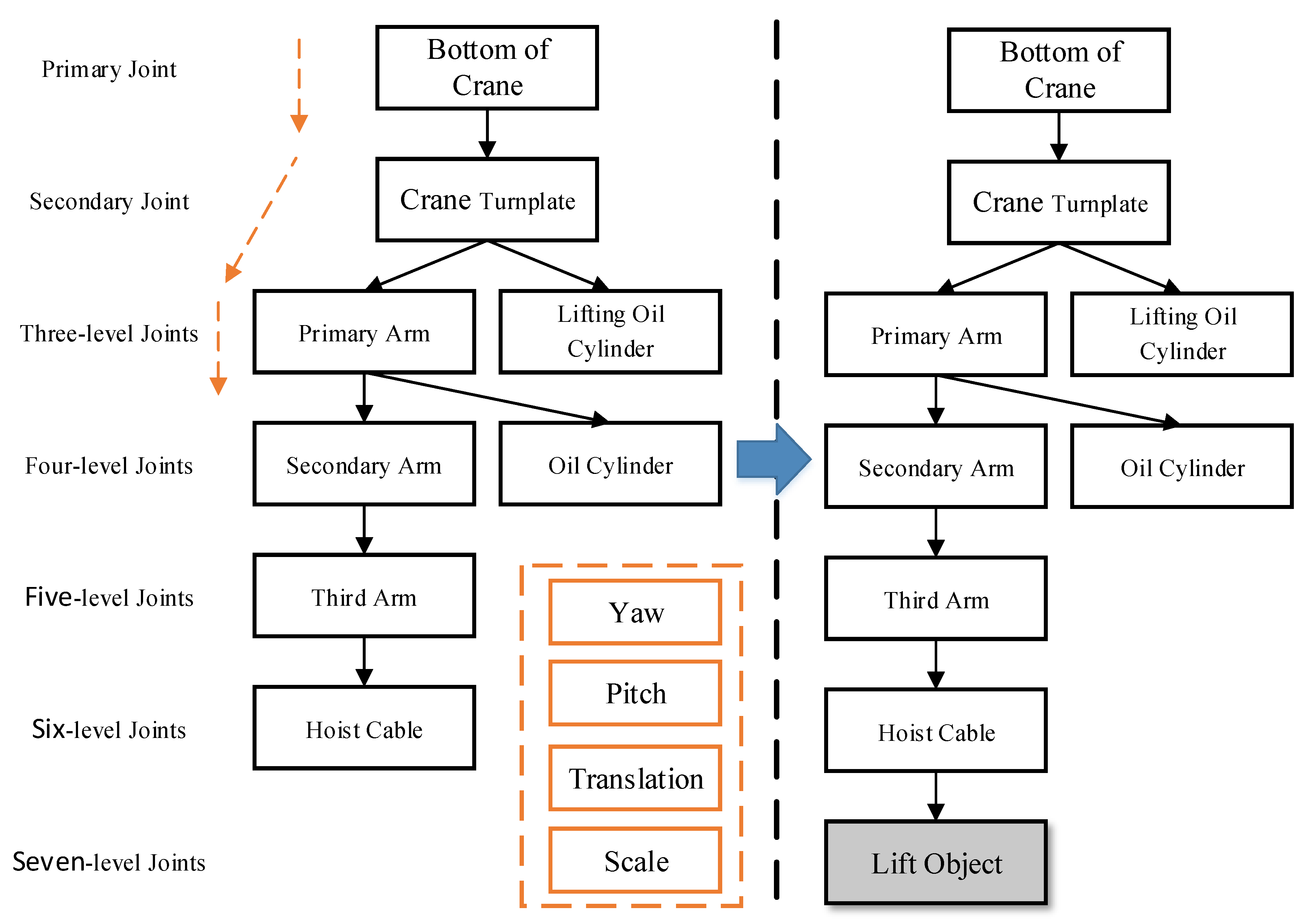
Although construction machinery works in a variety of ways, the movement of each joint is fixed. According to the operation actions of construction machinery, the corresponding model can be decomposed according to the joints, and the action of each joint is determined to provide a foundation for the extraction of mechanical work parameters. The joint splitting of the crane model considering joint activities yields the bottom of the crane (no action), crane turnplate (yaw), first arm (pitch), secondary arm (z-direction translation), third arm (z-direction translation), hoist cable (z-direction stretching and pitch), and oil cylinder (pitch). The bottom of the crane moves with the crane, so it is free of internal parameters. The crane turnplate mainly rotates in the horizontal direction around the bottom of the crane and therefore has a translational parameter.
After the model joints are decomposed, the level of each joint, namely, the mutual adhesion relation associated with two joints, needs to be determined according to the linkage relations in the model. Since the other joints are used as a final reference at the bottom of the crane, the bottom of the crane is a primary joint. The crane turnplate is attached to the bottom of the crane and is a secondary joint. The primary arm and the lifting oil cylinder are both attached to the crane turnplate and are tertiary joints. The secondary arm and the oil cylinder are fourth-level joints that are attached below the primary arm. The third arm is a fifth-level joint that is attached to the secondary arm. The hoist cable is a sixth-level joint that is attached to the third arm. The disassembly of the model joints, the action of each joint, and the linkages among joints are shown in
Figure 7.
The simulation mathematical model for the working state of a crane is as follows:
where
is the lifting rotation state function;
is a rotary yaw angle;
is the lifting state function of the lifting arm;
is the pitch angle of the lifting arm;
is the pitch angle of the oil cylinder body;
is the pitch angle of the lifting oil cylinder;
is the pitch angle of the hoist cable;
is the length of the first arm;
is the length between the first arm and lifting arm;
is the stretching state function of the arm; is the z-direction offset distance of the nth section of the arm;
is the stretch state function of the hoist cable; is the z-direction stretching ratio of the hoist cable; is the z-direction offset distance of the hoist cable; is the original length of the hoist cable; and is the stretching length of the hoist cable.
2.4.2. User-Oriented Animation Control Parameters
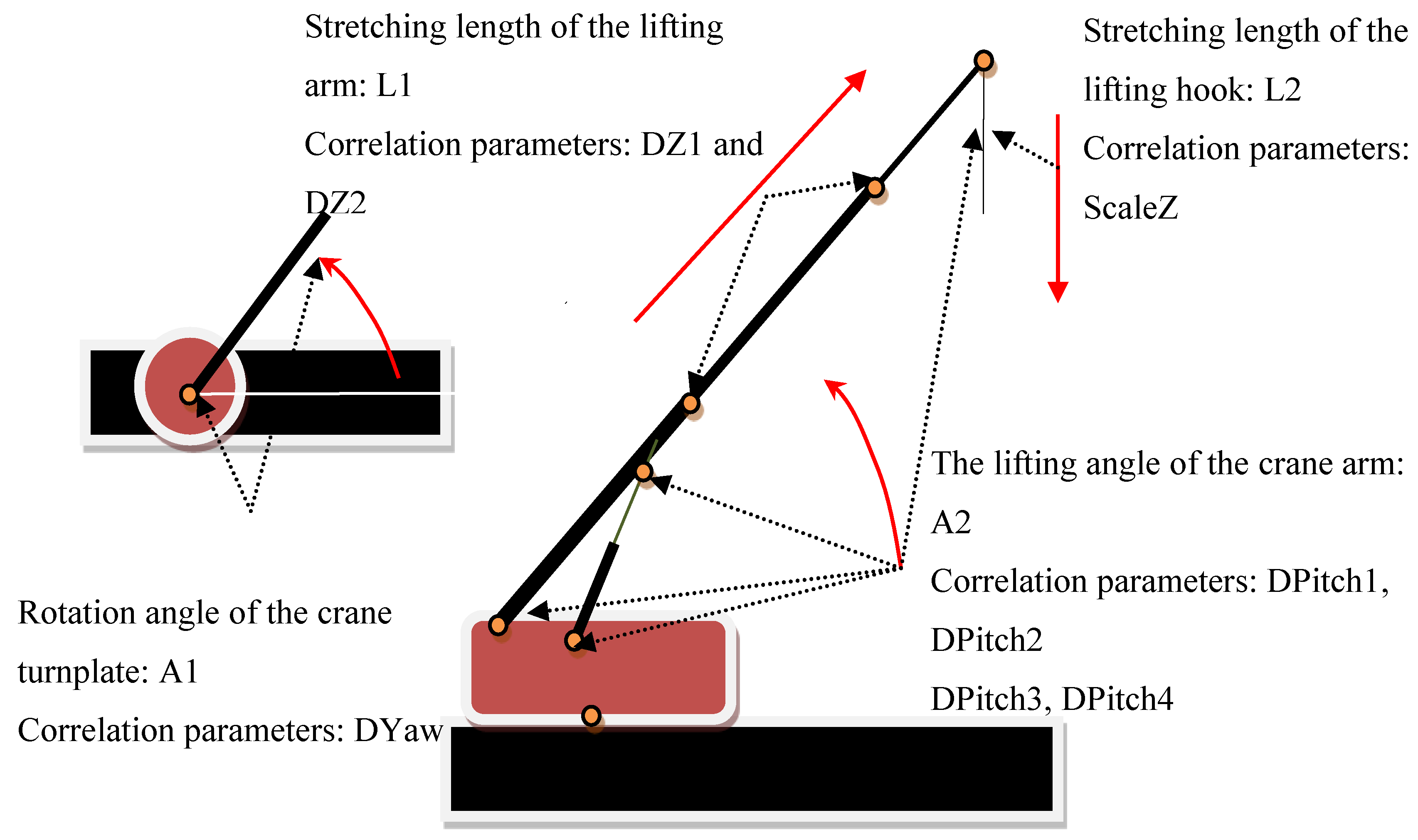
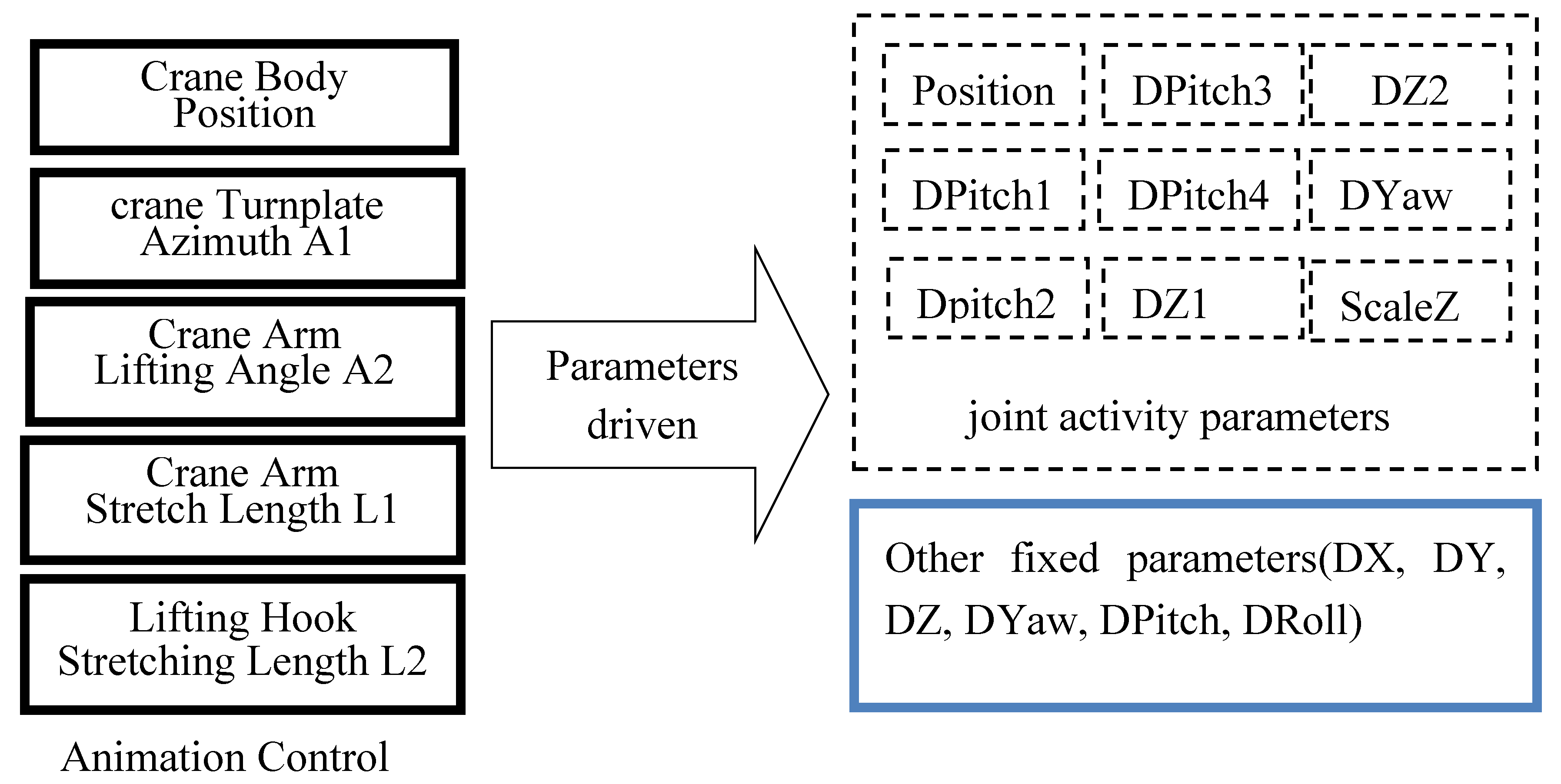
In order to control the mechanical motion, the following four animation control parameters are abstracted and then can be modified interactively as shown in
Figure 8: A1, the rotation angle of the crane turnplate, which influences the plane rotation parameter DYaw of the crane turnplate;
A2, the lifting angle of the crane arm, which influences the pitch angle of the primary arm, the lifting oil cylinder, the oil cylinder and the hoist cable;
L1, the stretching length of the lifting arm, which influences the stretching lengths of the secondary arm DZ1 and the third arm DZ2;
L2, the stretching length of the lifting hook, which influences the vertical-direction stretching parameter ScaleZ.
2.4.3. Mapping of Animation Control Parameters to Joint Activity Parameters
Animation control parameters are oriented to the user for the control of virtual construction, and the joint activity parameters are used in the construction simulation to calculate the position and attitude of each joint. Thus, there is a need to establish mapping relationships for the animation control parameters to the joint activity parameters. The repositioning and assembly of the component model are performed in real time according to the joint parameters so that any control of mechanical animation based on the packaging parameters can be achieved, as shown in
Figure 9.
2.4.4. Attachment for Hoisting
After the joint actions of the construction machinery are simulated, it is necessary to simulate the action when the construction machinery lifts an object. The object is hoisted based on the movement of the machinery; for example, the object rotates with the rotation of the arm. As a result, the hoisted object needs to be attached to the construction machinery. When analysing the joint linkage relationships of the crane, the hoist cable is a sixth-level joint. When the crane is lifting, the object being hoisted needs to be attached to the hoist cable and becomes a seventh-level joint.
Figure 10 illustrates the joint linkage relationships after the object to be hoisted is attached to the crane. In the figure, the dashed lines represent the transfer of linkage relationships, i.e., the child joints will move with the movement of the parent joints, with the movements mainly including rolling, rotation, translation, and stretching.
2.4.5. Work Animation Parameter Storage
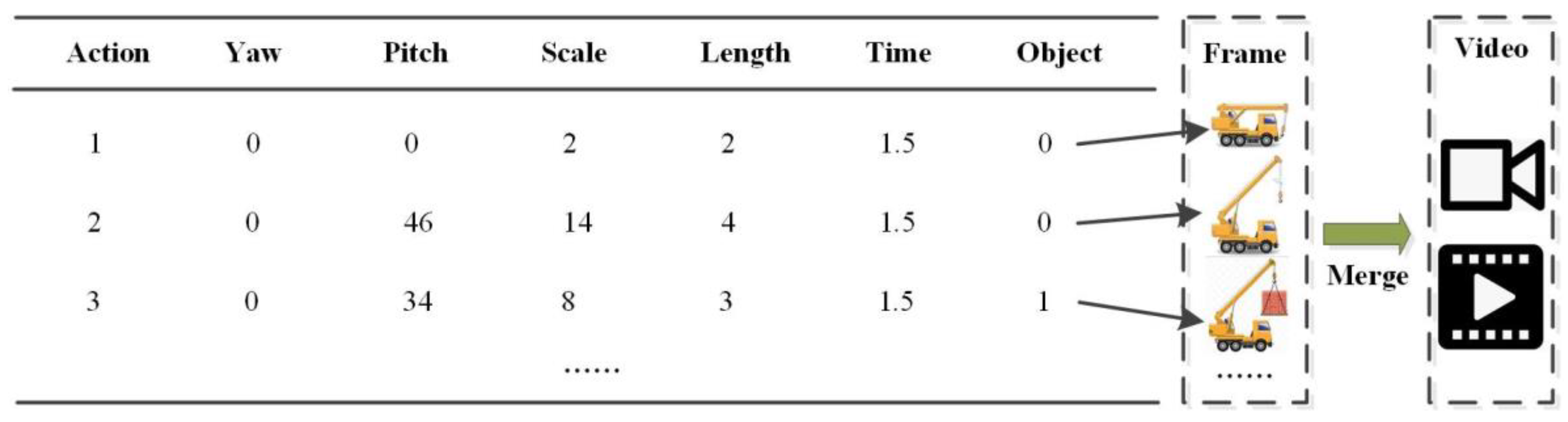
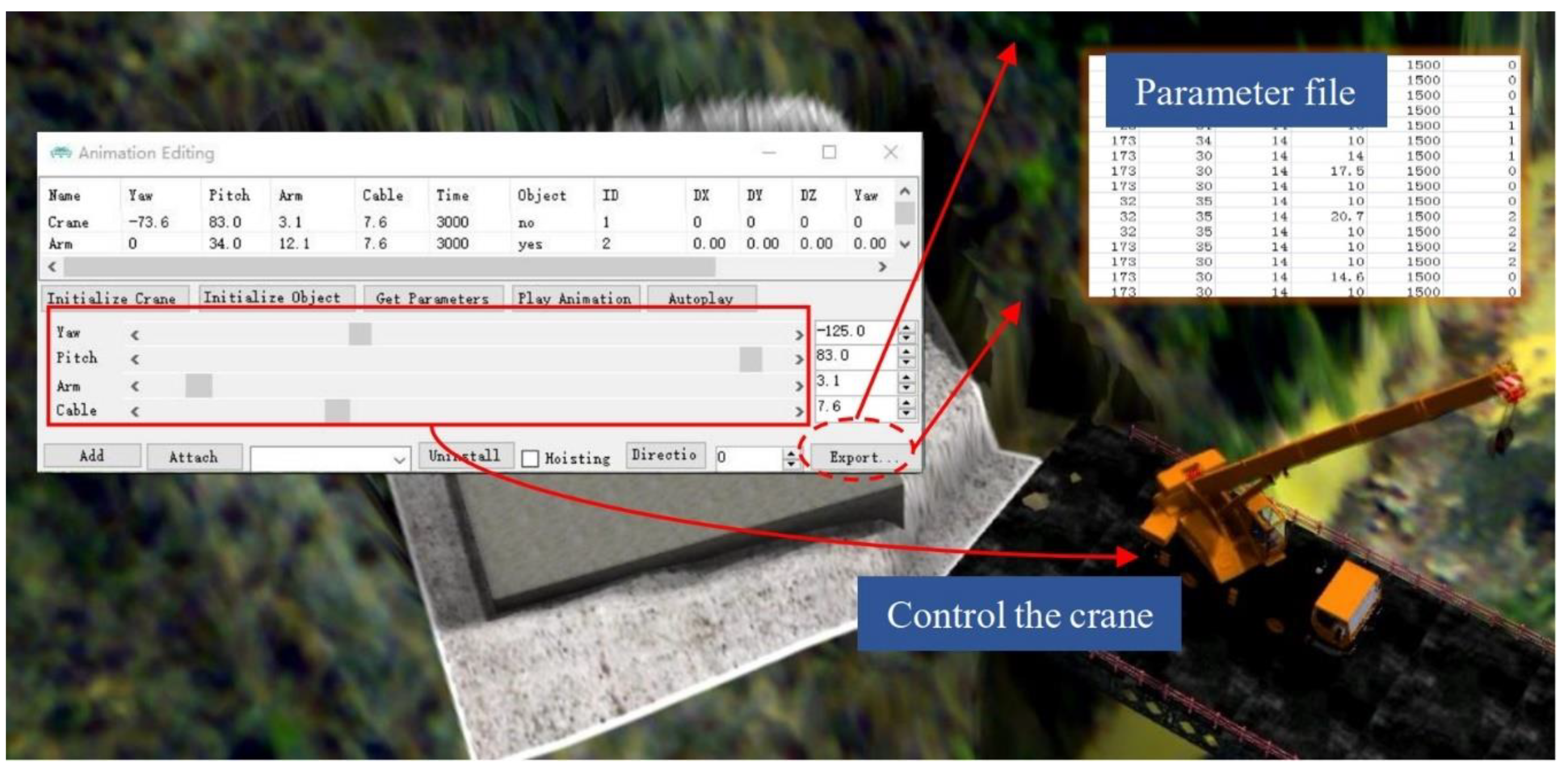
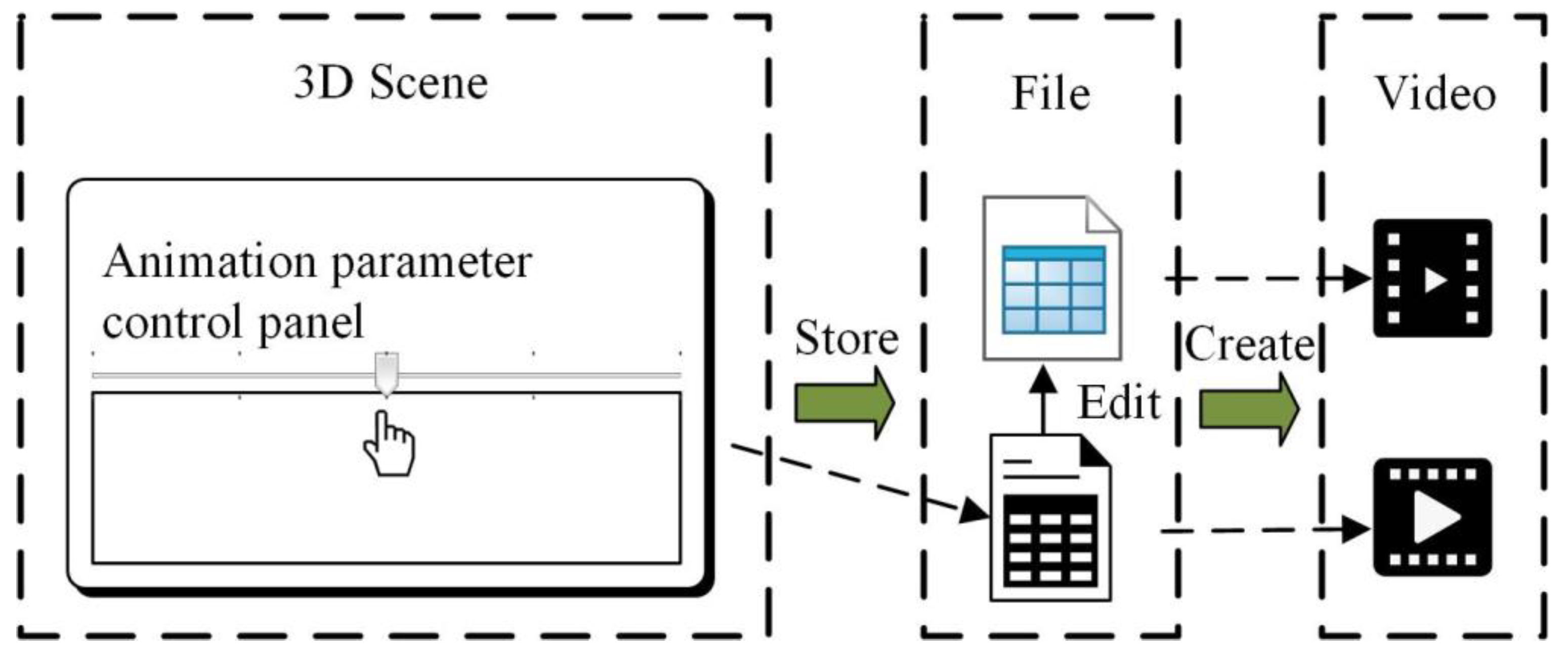
To save the work animation of construction machinery in a three-dimensional scene, an external parameter script file is used. The parameter script file records the parameter information for the construction machinery in a key operation step, including the yaw, pitch, scale, length, duration, number, etc., and linear interpolation is performed on the motion between the two moments to achieve a smooth transition between actions and obtain an animation. The yaw refers to the azimuth angle of the crane turntable, pitch refers to the arm lifting angle, scale refers to the arm stretching length, length refers to the hoist cable length, duration refers to the time required for the transition between two actions or points in time, and number is the ID of the hoisted object.
Figure 11 illustrates an animation parameter script file, wherein each row of data corresponds to a key frame in a three-dimensional scene. A user can perform a variety of construction operation animation simulations by editing the parameter scripts or real-time control parameters. Based on the principle of parameter-driven mechanical animation and the related computing tools, the animation script of a continuous operation can be edited by recording the state parameters of the machinery. Then, the complex animation can be edited and played for different states through the smooth transition of parameters.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















