An Integrated Spatiotemporal Pattern Analysis Model to Assess and Predict the Degradation of Protected Forest Areas

 , , , and
, , , and 
Abstract
:1. Introduction
2. Materials and Methods
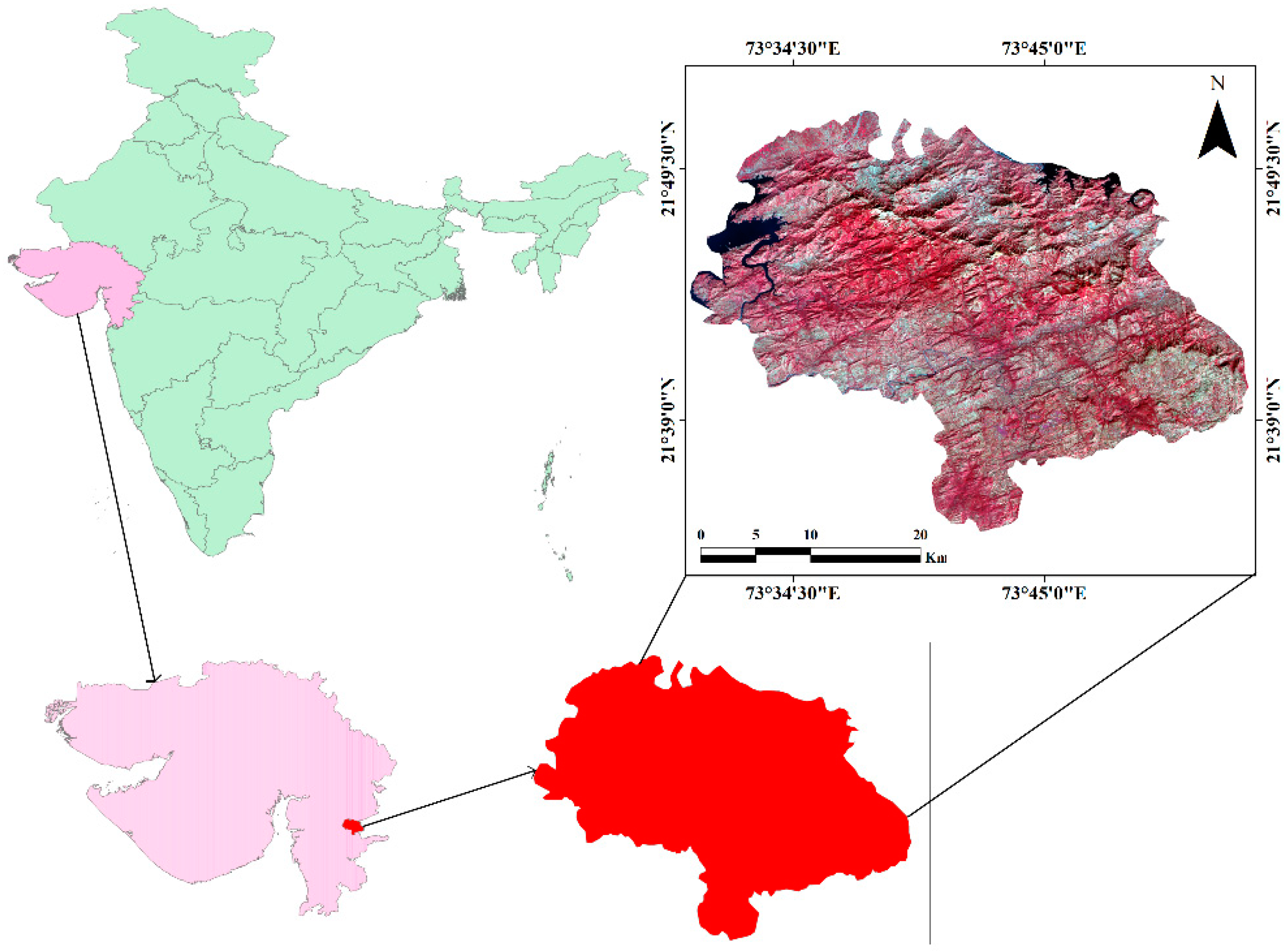
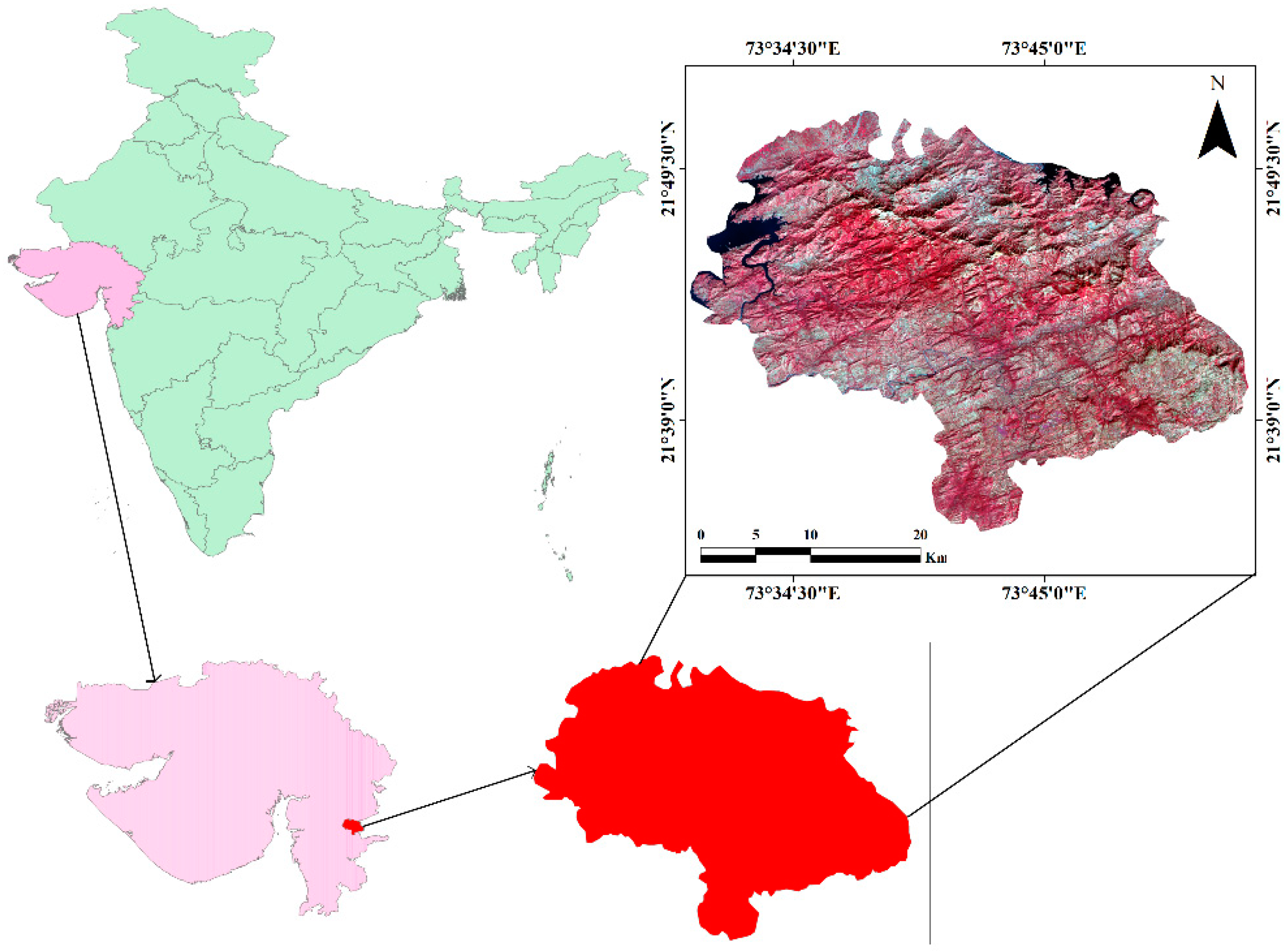
2.1. Study Area
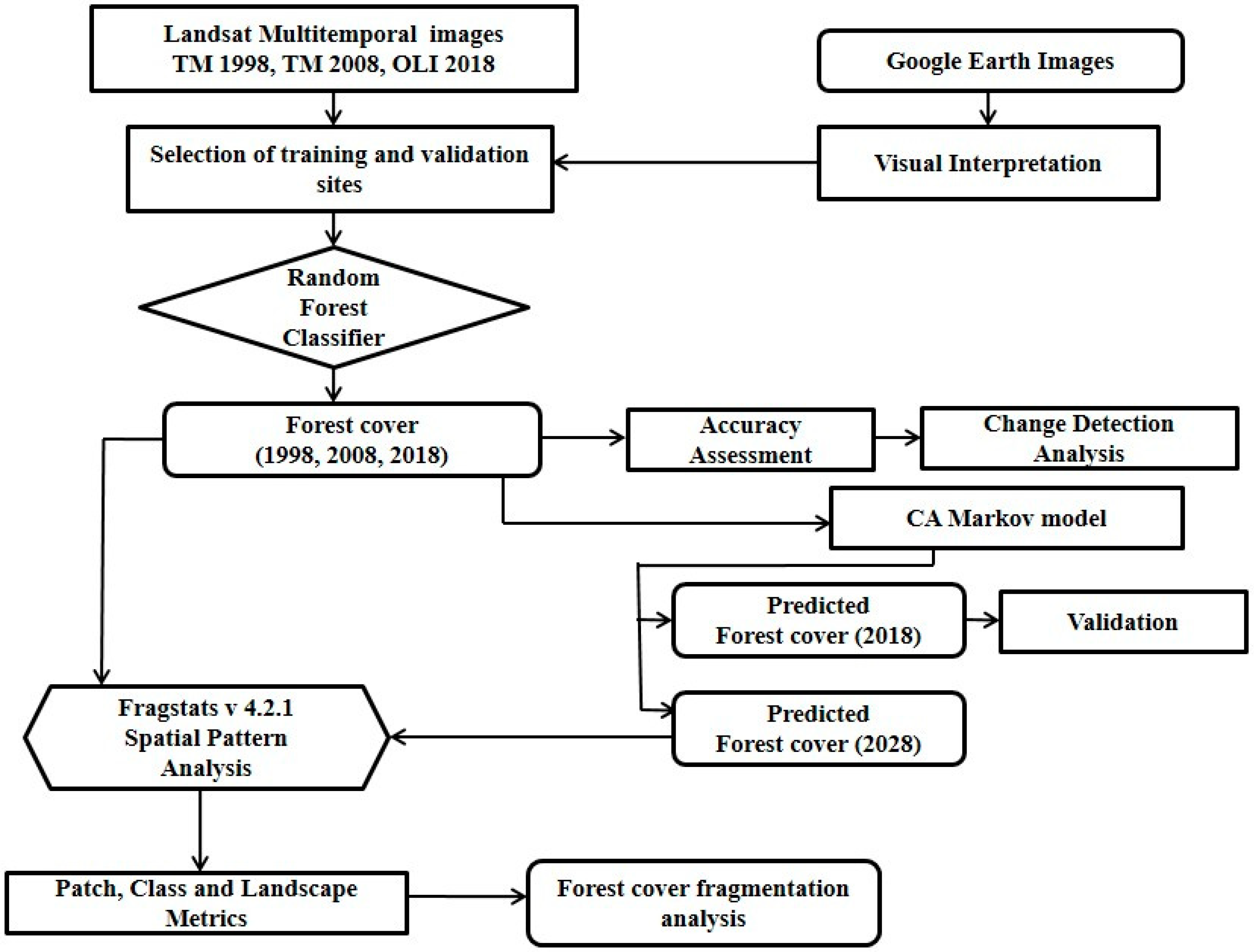
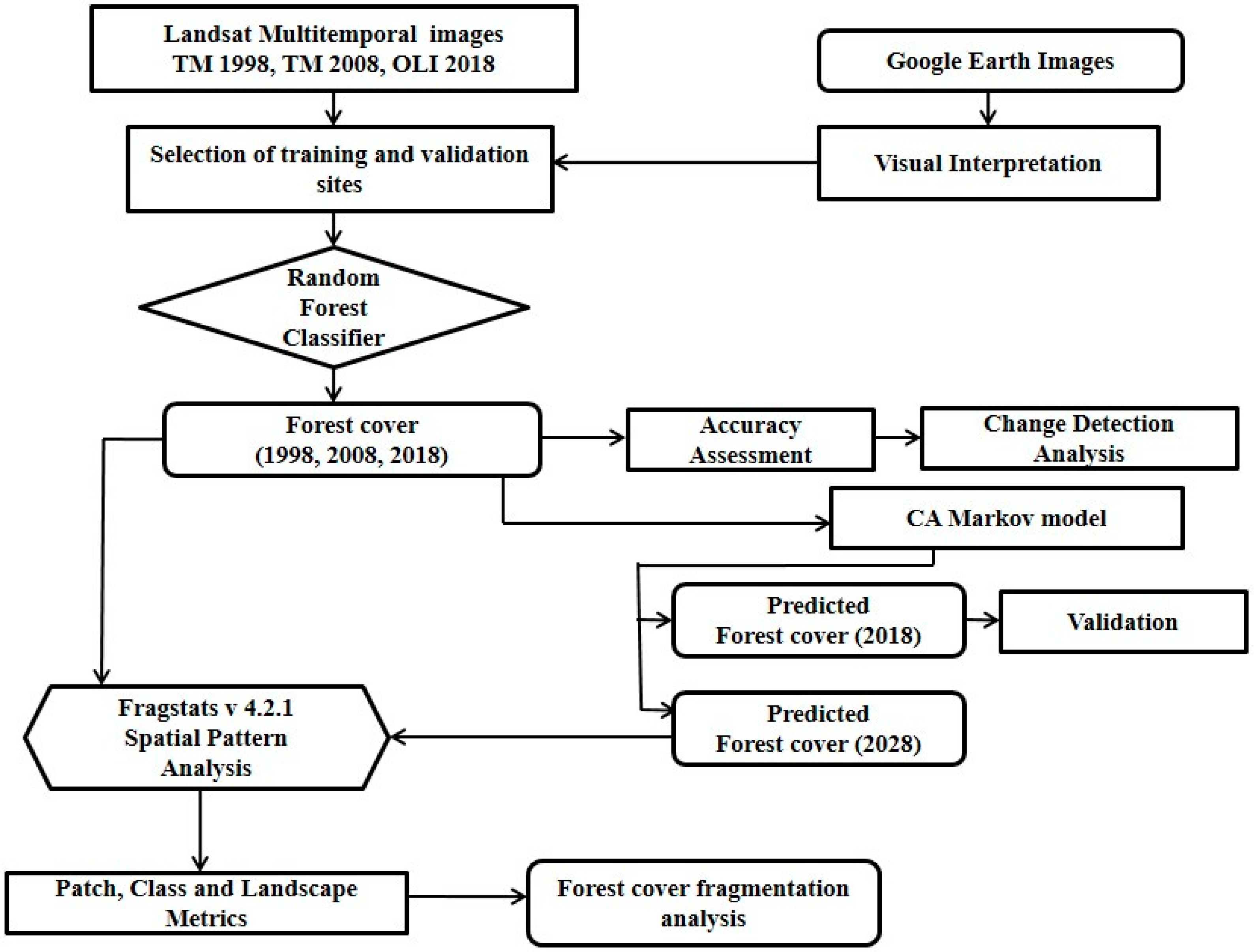
2.2. Datasets and Methodology
2.2.1. Satellite Data Acquisition & Pre-Processing
2.2.2. Forest Cover Classification
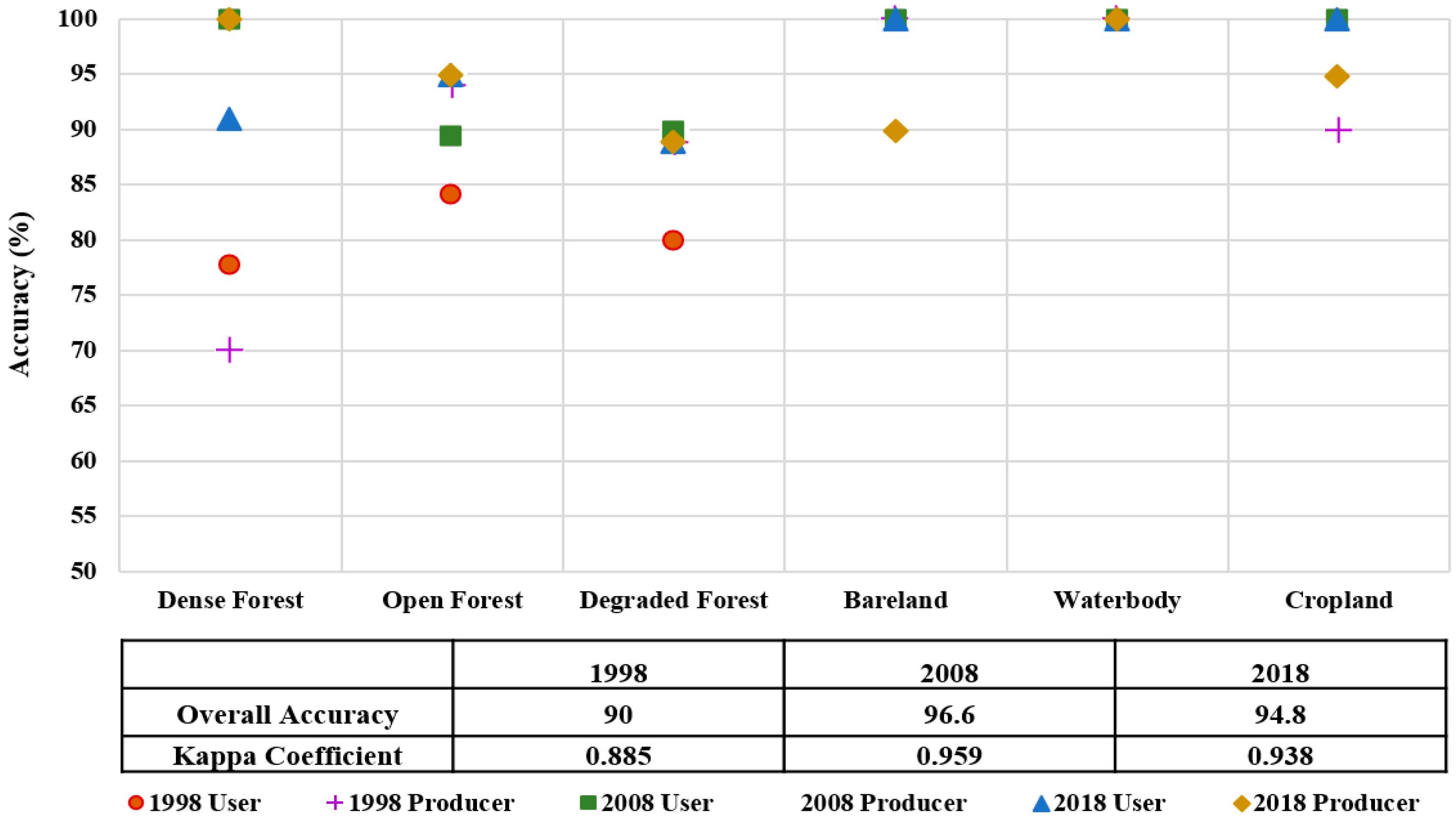
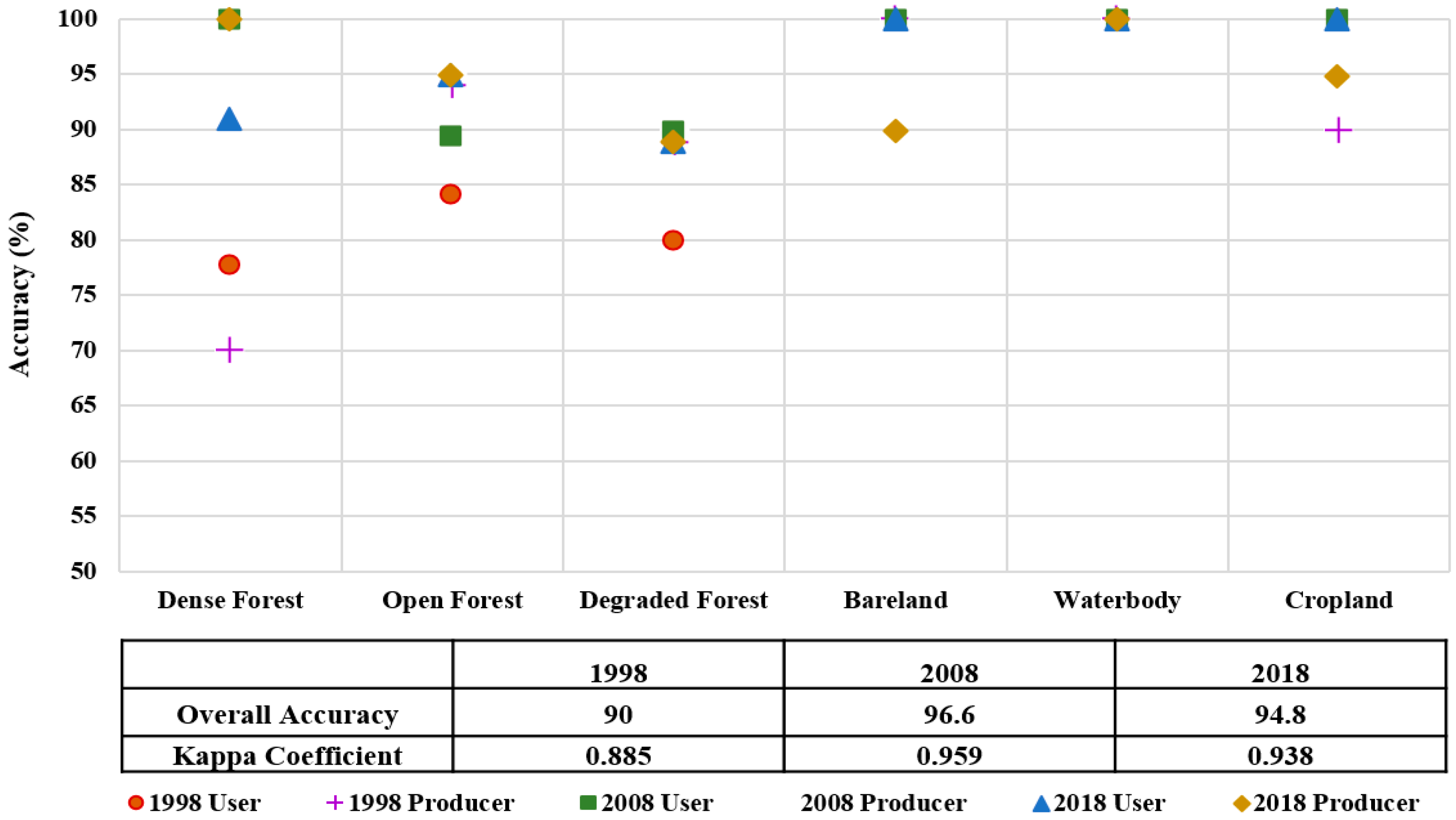
2.2.3. Accuracy Assessment
2.2.4. CA-Markov Chain
2.2.5. Fragmentation Analysis
3. Results and Discussion
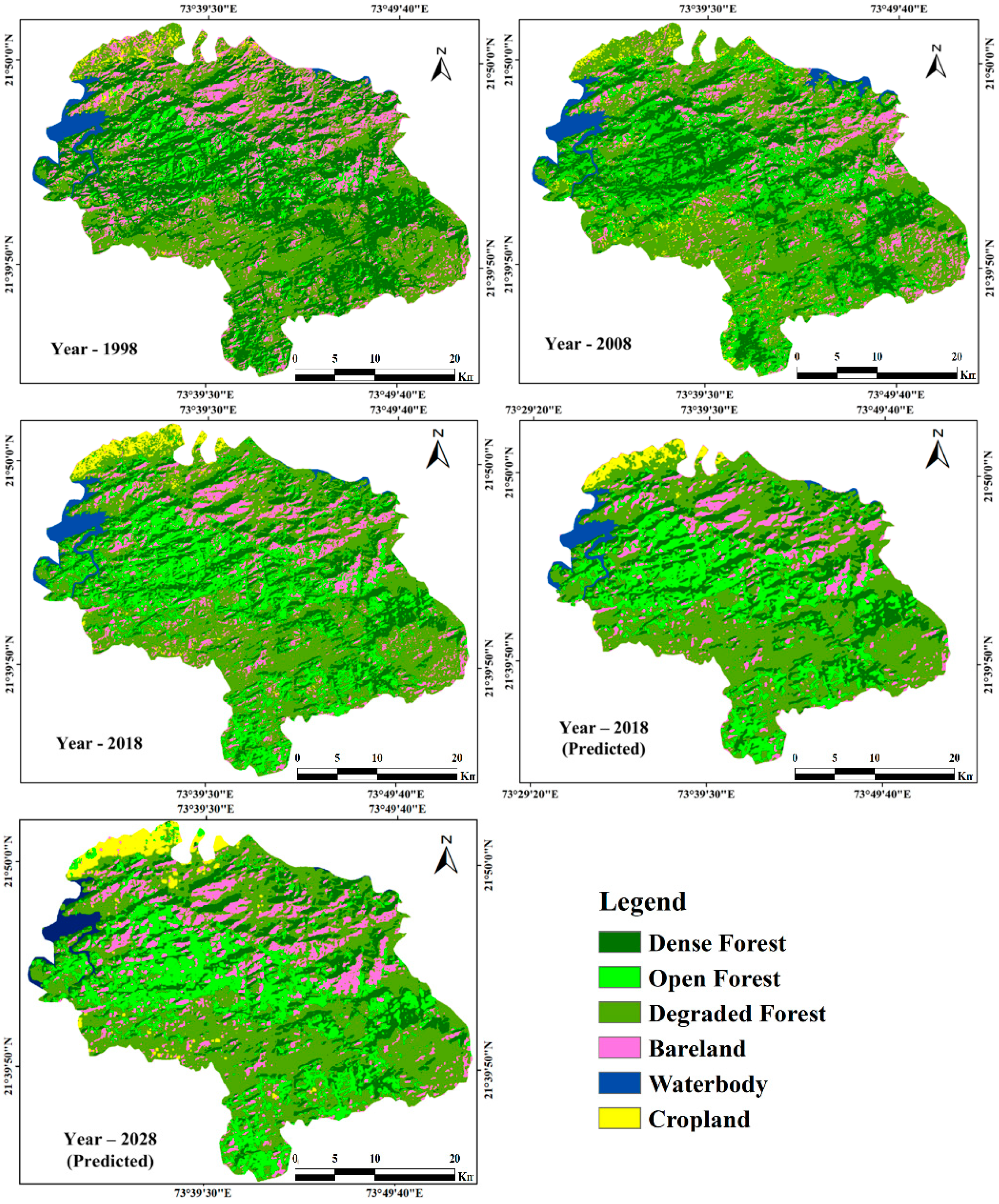
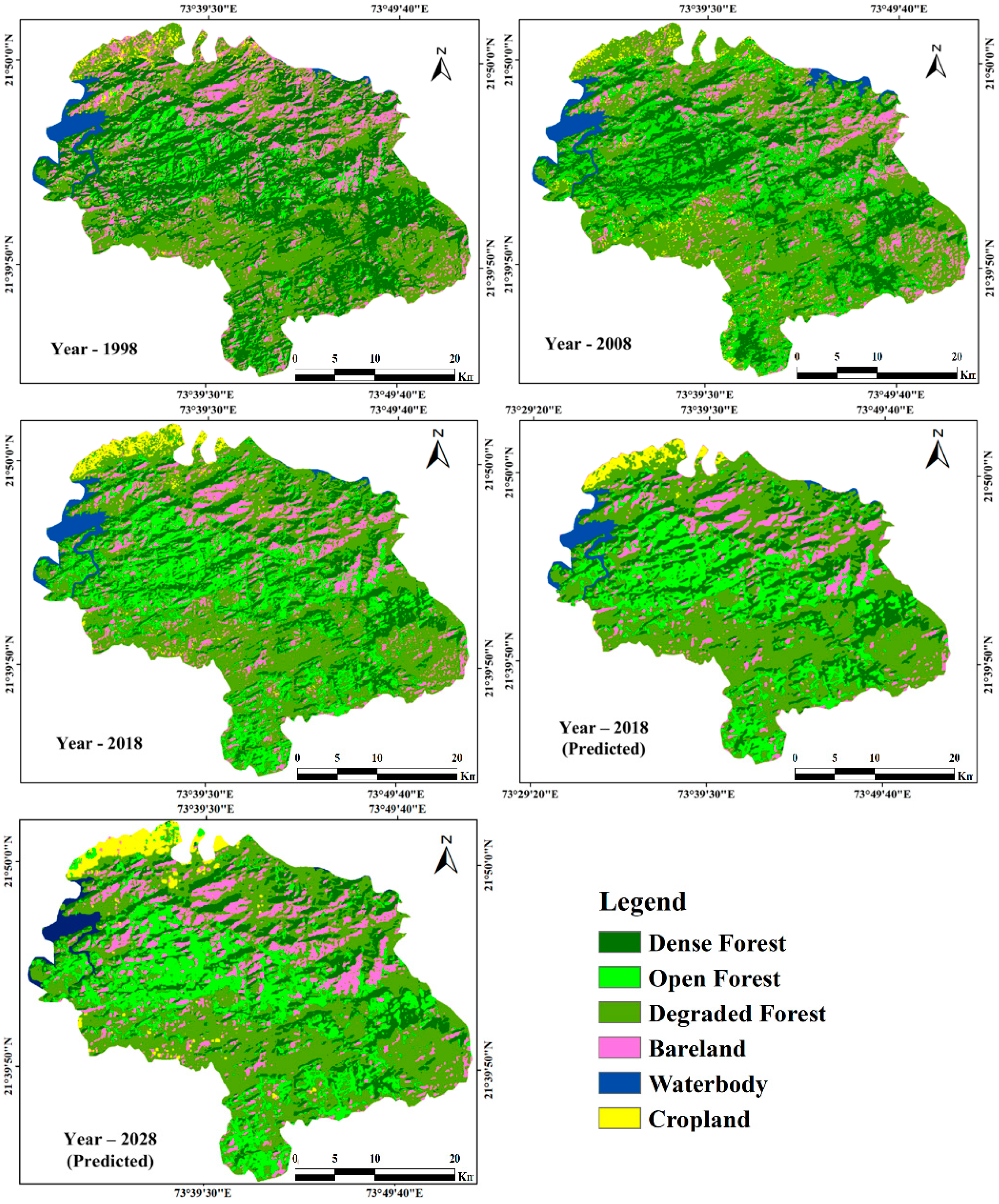
3.1. Spatiotemporal Forest Cover Classification and Accuracy Assessment
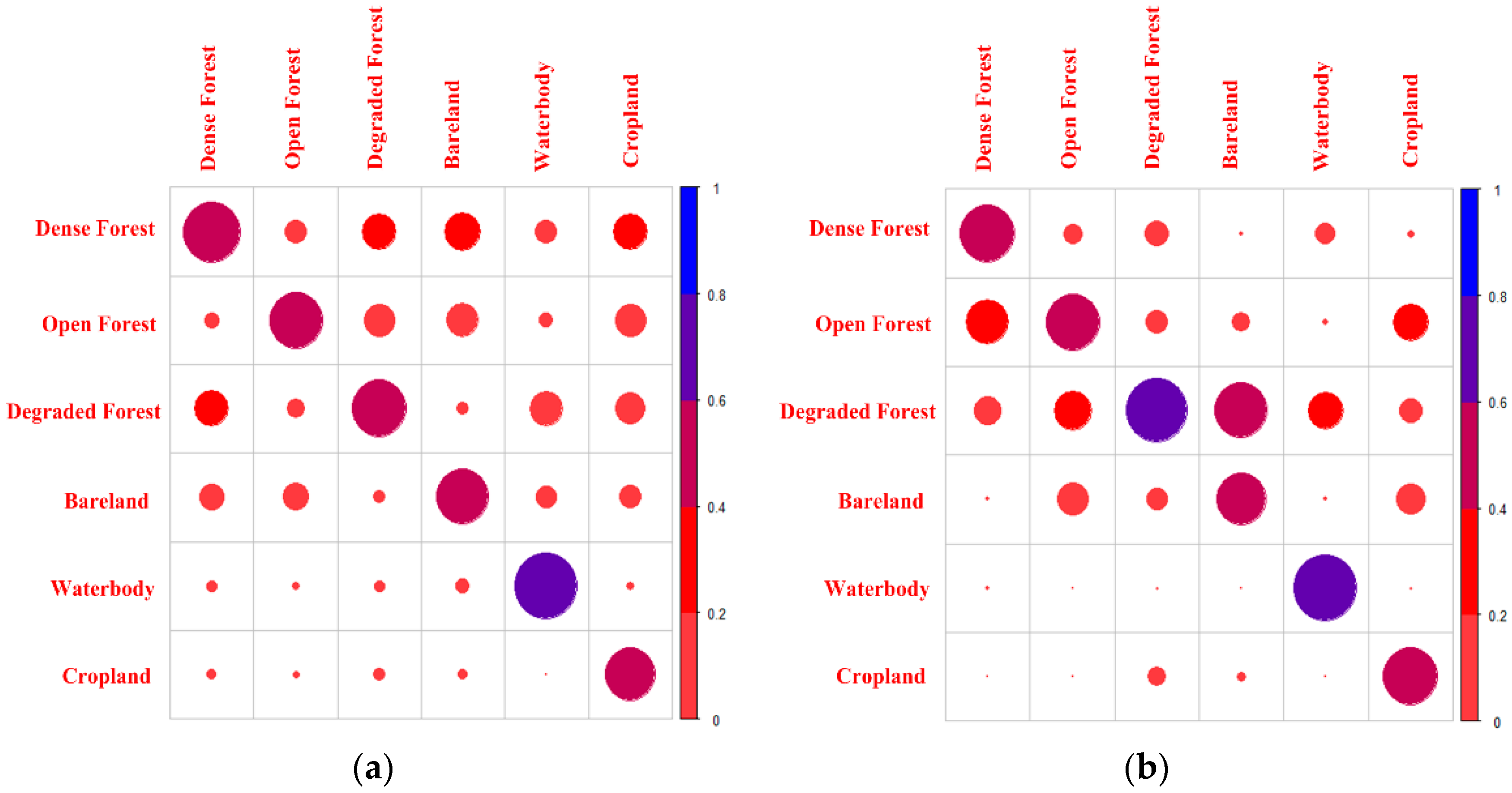
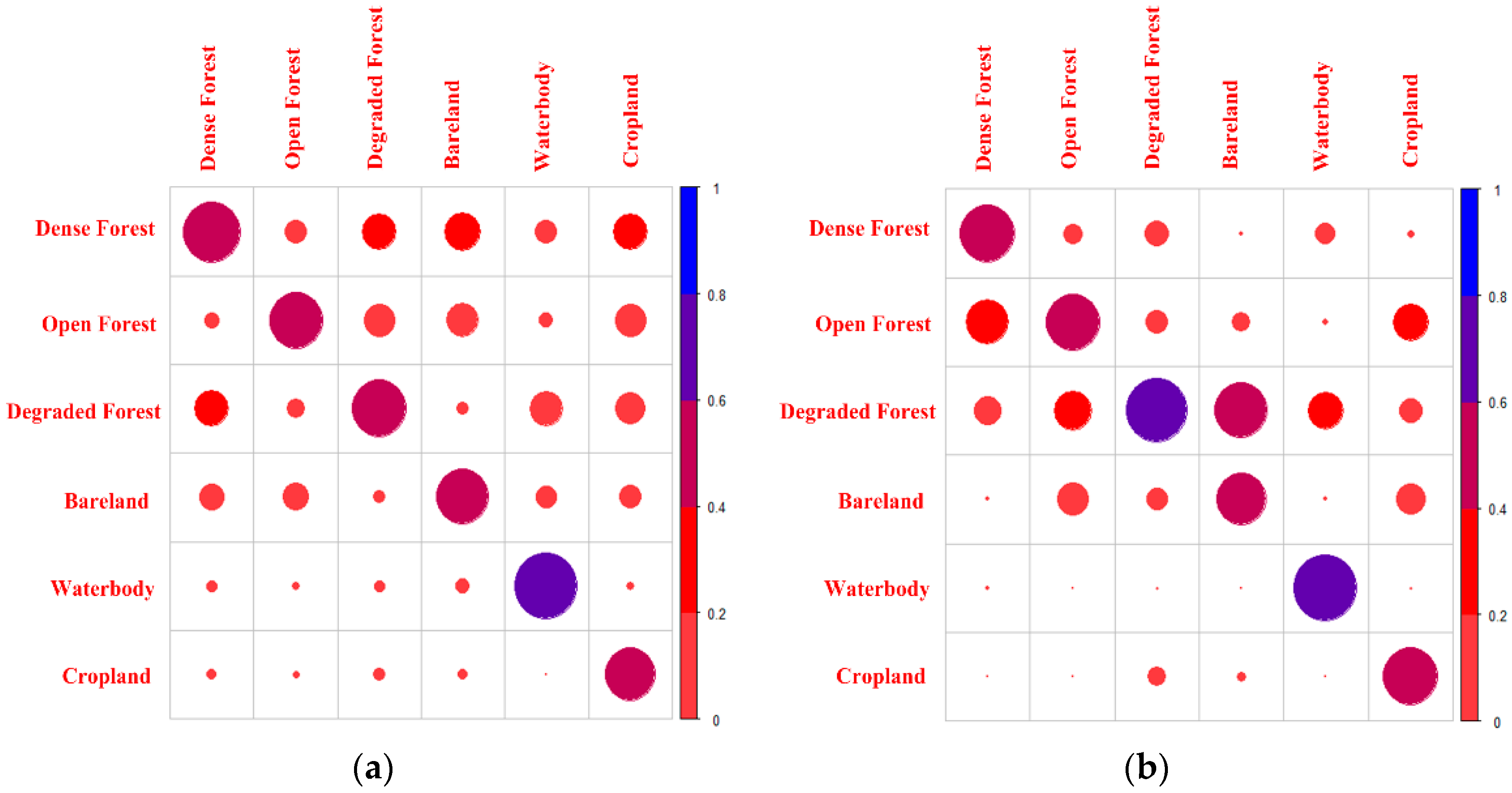
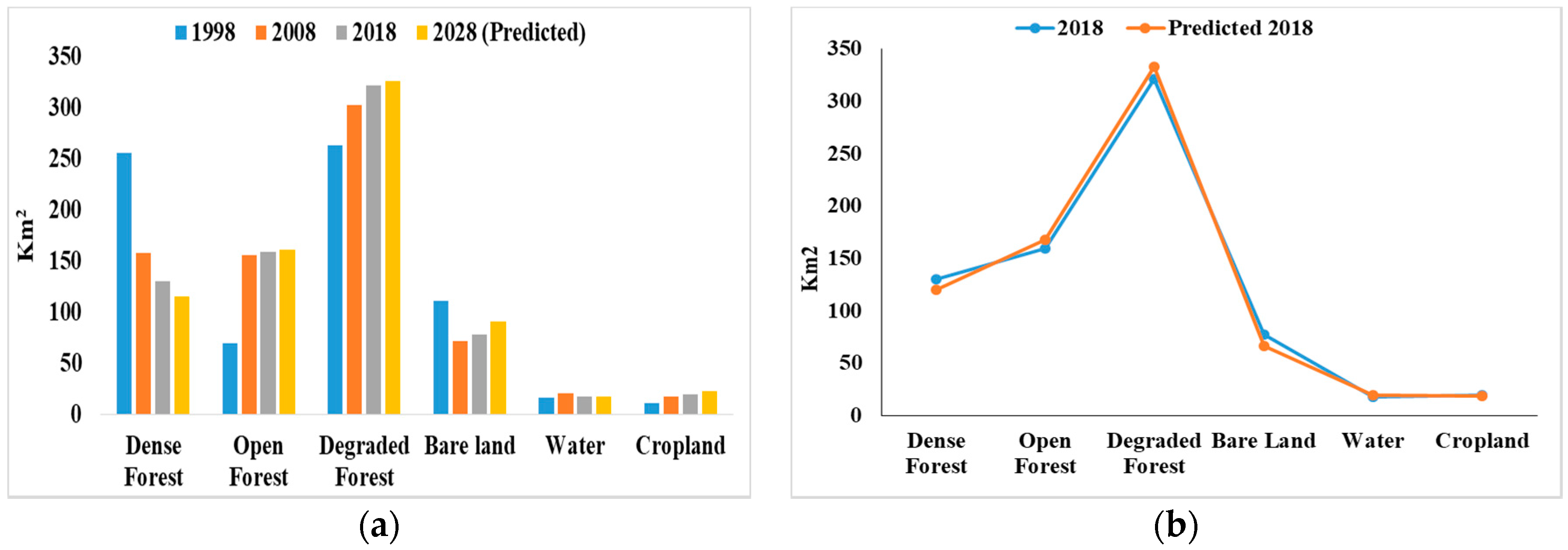
3.2. Forest Cover Modeling Using CA-Markov and Validation
3.3. Change Detection Analysis
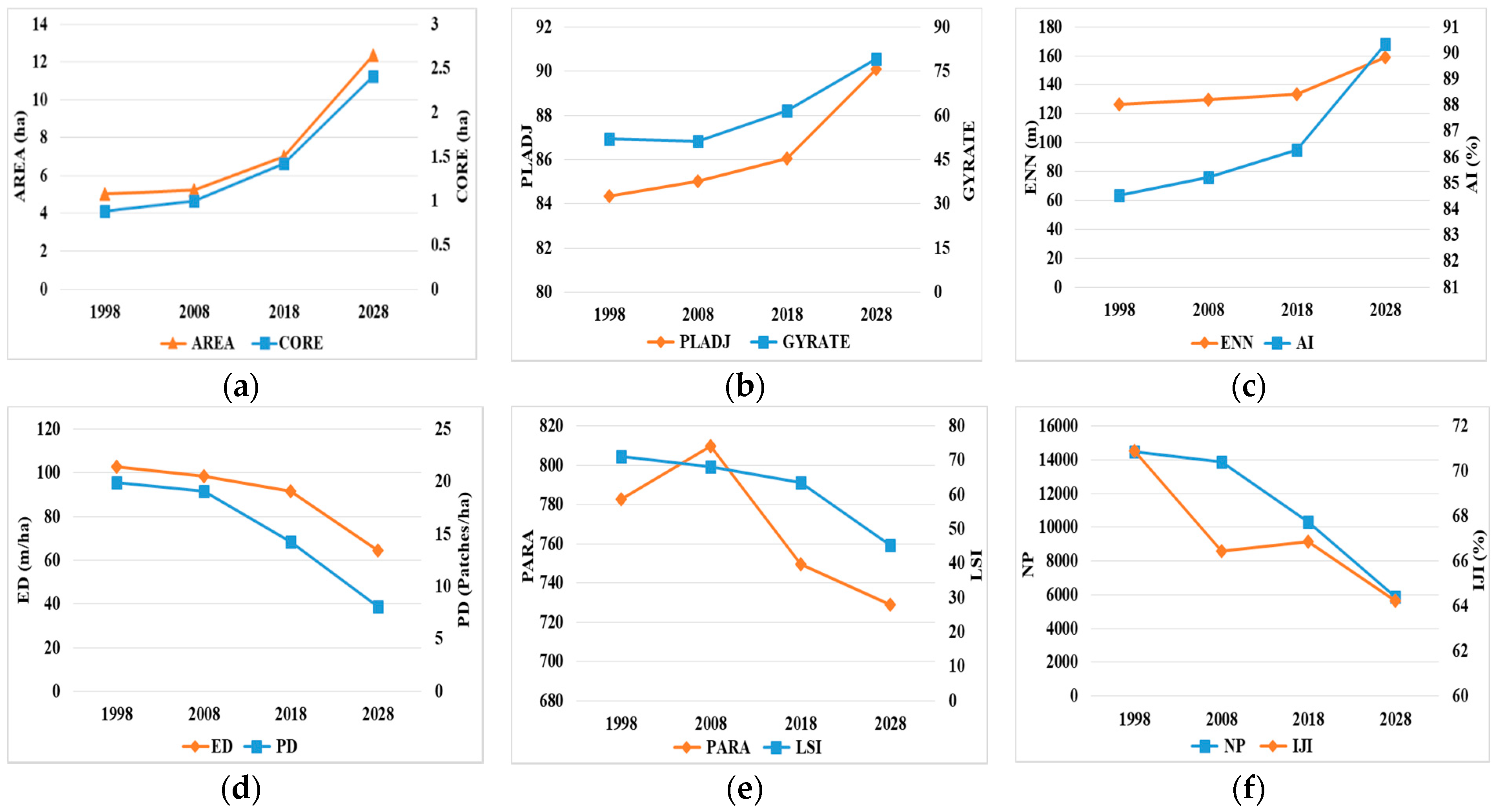
3.4. Fragmentation Analysis at Patch Level
3.5. Fragmentation Analysis at Class Level
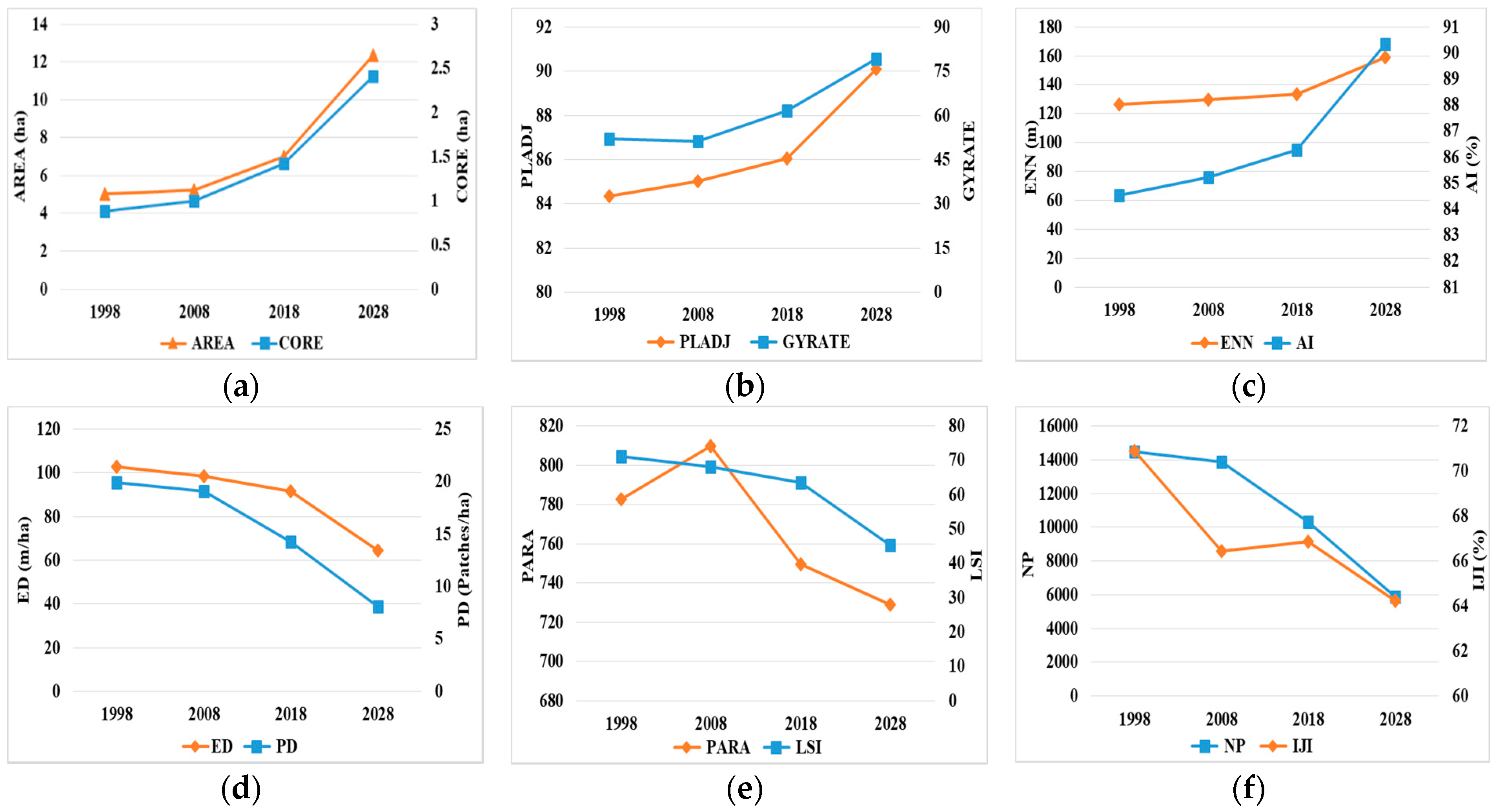
3.6. Fragmentation Analysis at Landscape Level
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kiran, G.S.; Malhi, R.K.M. Economic valuation of forest soils. Curr. Sci. 2011, 100, 396–399. [Google Scholar]
- Lewis, S.L.; Edwards, D.P.; Galbraith, D. Increasing human dominance of tropical forests. Science 2015, 349, 827–832. [Google Scholar] [CrossRef]
- Fahrig, L. Effects of habitat fragmentation on biodiversity. Annu. Rev. Ecol. Evol. Syst. 2003, 34, 487–515. [Google Scholar] [CrossRef] [Green Version]
- Forman, R.T.; Godron, M. Landscape Ecology; John Wiley & Sons: New York, NY, USA, 1986; Volume 4, pp. 22–28. [Google Scholar]
- Haila, Y. Islands and fragments. In Maintaining Biodiversity in Forest Ecosystems; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Anand, A.; Malhi, R.K.M.; Pandey, P.C.; Petropoulos, G.P.; Pavlides, A.; Sharma, J.K.; Srivastava, P.K. Use of Hyperion for Mangrove Forest Carbon Stock Assessment in Bhitarkanika Forest Reserve: A Contribution Towards Blue Carbon Initiative. Remote Sens. 2020, 12, 597. [Google Scholar] [CrossRef] [Green Version]
- Pandey, P.C.; Anand, A.; Srivastava, P.K. Spatial distribution of mangrove forest species and biomass assessment using field inventory and earth observation hyperspectral data. Biodivers. Conserv. 2019, 28, 2143–2162. [Google Scholar] [CrossRef]
- Foley, J.A.; DeFries, R.; Asner, G.P.; Barford, C.; Bonan, G.; Carpenter, S.R.; Chapin, F.S.; Coe, M.T.; Daily, G.C.; Gibbs, H.K. Global consequences of land use. Science 2005, 309, 570–574. [Google Scholar] [CrossRef] [Green Version]
- Wade, T.G.; Riitters, K.H.; Wickham, J.D.; Jones, K.B. Distribution and causes of global forest fragmentation. Conserv. Ecol. 2003, 7, 7. [Google Scholar] [CrossRef]
- Gamfeldt, L.; Snäll, T.; Bagchi, R.; Jonsson, M.; Gustafsson, L.; Kjellander, P.; Ruiz-Jaen, M.C.; Fröberg, M.; Stendahl, J.; Philipson, C.D. Higher levels of multiple ecosystem services are found in forests with more tree species. Nat. Commun. 2013, 4, 1–8. [Google Scholar] [CrossRef]
- Marchetti, M.; Sallustio, L.; Ottaviano, M.; Barbati, A.; Corona, P.; Tognetti, R.; Zavattero, L.; Capotorti, G. Carbon sequestration by forests in the National Parks of Italy. Plant Biosyst. Int. J. Deal. All Asp. Plant Biol. 2012, 146, 1001–1011. [Google Scholar] [CrossRef]
- Benitez-Malvido, J. Impact of forest fragmentation on seedling abundance in a tropical rain forest. Conserv. Biol. 1998, 12, 380–389. [Google Scholar] [CrossRef]
- Laurance, W.F.; Nascimento, H.E.; Laurance, S.G.; Andrade, A.; Ewers, R.M.; Harms, K.E.; Luizao, R.C.; Ribeiro, J.E. Habitat fragmentation, variable edge effects, and the landscape-divergence hypothesis. PLoS ONE 2007, 2, e1017. [Google Scholar] [CrossRef] [PubMed]
- Loynl, R.H.; McAlpine, C. Spatial Patterns and Fragmentation: Indicators for Conserving Biodiversity in Forest. Criteria Indic. Sustain. For. Manag. 2001, 7, 391. [Google Scholar]
- Azevedo, J.; Perera, A.H.; Pinto, M.A. Forest Landscapes and Global Change: Challenges for Research and Management; Springer: Berlin, Germany, 2014. [Google Scholar]
- Rochelle, J.A.; Lehmann, L.A.; Wisniewski, J. Forest Fragmentation: Wildlife and Management Implications; Brill: Leiden, The Netherlands, 1999. [Google Scholar]
- Forman, R. Land Mosaics: The ecology of landscapes and regions (1995). In The Ecological Design and Planning Reader; IslandPress: Washington, DC, USA, 2014; pp. 217–234. [Google Scholar]
- Harris, L.D.; Harris, L.D. The Fragmented Forest: Island Biogeography Theory and the Preservation of Biotic Diversity; University of Chicago press: Chicago, IL, USA, 1984. [Google Scholar]
- Hill, J.; Curran, P. Species composition in fragmented forests: Conservation implications of changing forest area. Appl. Geogr. 2001, 21, 157–174. [Google Scholar] [CrossRef]
- Pontius, R.G., Jr. Comparison of categorical maps. Photogramm. Eng. Remote Sens. 2000, 66, 1011–1016. [Google Scholar]
- Achard, F.; Hansen, M.C. Global Forest Monitoring from Earth Observation; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Dougherty, E.R.; Newell, J.T.; Pelz, J.B. Morphological texture-based maximum-likelihood pixel classification based on local granulometric moments. Pattern Recognit. 1992, 25, 1181–1198. [Google Scholar] [CrossRef]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef] [Green Version]
- Menard, S. Applied Logistic Regression Analysis; Sage: Thousand Oaks, CA, USA, 2002; Volume 106. [Google Scholar]
- Huang, C.; Davis, L.; Townshend, J. An assessment of support vector machines for land cover classification. Int. J. Remote Sens. 2002, 23, 725–749. [Google Scholar] [CrossRef]
- Kamusoko, C.; Aniya, M.; Adi, B.; Manjoro, M. Rural sustainability under threat in Zimbabwe–simulation of future land use/cover changes in the Bindura district based on the Markov-cellular automata model. Appl. Geogr. 2009, 29, 435–447. [Google Scholar] [CrossRef]
- Kantakumar, L.N.; Neelamsetti, P. Multi-temporal land use classification using hybrid approach. Egypt. J. Remote Sens. Space Sci. 2015, 18, 289–295. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Feng, Q.; Liu, J.; Gong, J. UAV remote sensing for urban vegetation mapping using random forest and texture analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef] [Green Version]
- Kamusoko, C.; Gamba, J. Simulating urban growth using a Random Forest-Cellular Automata (RF-CA) model. ISPRS Int. J. Geo-Inf. 2015, 4, 447–470. [Google Scholar] [CrossRef]
- Rodriguez, J.D.; Perez, A.; Lozano, J.A. Sensitivity analysis of k-fold cross validation in prediction error estimation. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 32, 569–575. [Google Scholar] [CrossRef] [PubMed]
- Ruiz Hernandez, I.E.; Shi, W. A Random Forests classification method for urban land-use mapping integrating spatial metrics and texture analysis. Int. J. Remote Sens. 2018, 39, 1175–1198. [Google Scholar] [CrossRef]
- More, A.; Rana, D.P. Review of random forest classification techniques to resolve data imbalance. In Proceedings of the 2017 1st International Conference on Intelligent Systems and Information Management (ICISIM), Maharashtra, India, 5–6 October 2007; pp. 72–78. [Google Scholar]
- Ranjan, A.K.; Anand, A.; Vallisree, S.; Singh, R.K. LU/LC change detection and forest degradation analysis in Dalma wildlife sanctuary using 3S technology: A case study in Jamshedpur-India. Aims Geosci. 2016, 2, 273–285. [Google Scholar] [CrossRef]
- Mishra, V.N.; Prasad, R.; Kumar, P.; Gupta, D.K.; Srivastava, P.K. Dual-polarimetric C-band SAR data for land use/land cover classification by incorporating textural information. Environ. Earth Sci. 2017, 76, 26. [Google Scholar] [CrossRef]
- Ranjan, A.K.; Anand, A.; Kumar, P.B.S.; Verma, S.K.; Murmu, L. Prediction of Land Surface Temperature within Sun City Jodhpur (Rajasthan) in India Using Integration of Artificial Neural Network and Geoinformatics Technology. Asian J. Geoinform. 2018, 17, 14–23. [Google Scholar]
- Wolfram, S. Cellular Automata and Complexity: Collected Papers; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Suzuki, J. A Markov chain analysis on simple genetic algorithms. IEEE Trans. Syst. ManCybern. 1995, 25, 655–659. [Google Scholar] [CrossRef]
- Verhagen, P. Case Studies in Archaeological Predictive Modelling; Amsterdam University Press: Amsterdam, The Netherlands, 2007; Volume 14. [Google Scholar]
- Halmy, M.W.A.; Gessler, P.E.; Hicke, J.A.; Salem, B.B. Land use/land cover change detection and prediction in the north-western coastal desert of Egypt using Markov-CA. Appl. Geogr. 2015, 63, 101–112. [Google Scholar] [CrossRef]
- Vázquez-Quintero, G.; Solís-Moreno, R.; Pompa-García, M.; Villarreal-Guerrero, F.; Pinedo-Alvarez, C.; Pinedo-Alvarez, A. Detection and projection of forest changes by using the Markov Chain Model and cellular automata. Sustainability 2016, 8, 236. [Google Scholar] [CrossRef] [Green Version]
- Cabral, P.; Zamyatin, A. Markov processes in modeling land use and land cover changes in Sintra-Cascais, Portugal. Dyna 2009, 76, 191–198. [Google Scholar]
- Glenn-Lewin, D.C.; Peet, R.K.; Veblen, T.T. Plant Succession: Theory and Prediction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1992; Volume 11. [Google Scholar]
- Hu, Z.; Lo, C. Modeling urban growth in Atlanta using logistic regression. Comput. Environ. Urban Syst. 2007, 31, 667–688. [Google Scholar] [CrossRef]
- Kucsicsa, G.; Popovici, E.-A.; Bălteanu, D.; Dumitraşcu, M.; Grigorescu, I.; Mitrică, B. Assessing the Potential Future Forest-Cover Change in Romania, Predicted Using a Scenario-Based Modelling. Environ. Model. Assess. 2019, 1–21. [Google Scholar] [CrossRef]
- Lepš, J. Mathematical modelling of ecological succesion—A review. Folia Geobot. Et Phytotaxon. 1988, 23, 79–94. [Google Scholar] [CrossRef]
- Liu, Y. Modelling Urban Development with Geographical Information Systems and Cellular Automata; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Guan, D.; Li, H.; Inohae, T.; Su, W.; Nagaie, T.; Hokao, K. Modeling urban land use change by the integration of cellular automaton and Markov model. Ecol. Model. 2011, 222, 3761–3772. [Google Scholar] [CrossRef]
- Keshtkar, H.; Voigt, W. A spatiotemporal analysis of landscape change using an integrated Markov chain and cellular automata models. Model. Earth Syst. Environ. 2016, 2, 10. [Google Scholar] [CrossRef] [Green Version]
- Mitsova, D.; Shuster, W.; Wang, X. A cellular automata model of land cover change to integrate urban growth with open space conservation. Landsc. Urban Plan. 2011, 99, 141–153. [Google Scholar] [CrossRef]
- Subedi, P.; Subedi, K.; Thapa, B. Application of a hybrid cellular automaton–Markov (CA-Markov) model in land-use change prediction: A case study of Saddle Creek Drainage Basin, Florida. Appl. Ecol. Environ. Sci. 2013, 1, 126–132. [Google Scholar] [CrossRef] [Green Version]
- Çakir, G.; Sivrikaya, F.; Keleş, S. Forest cover change and fragmentation using Landsat data in Maçka State Forest Enterprise in Turkey. Environ. Monit. Assess. 2008, 137, 51–66. [Google Scholar] [CrossRef]
- Ojoyi, M.; Odindi, J.; Mutanga, O.; Abdel-Rahman, E. Analysing fragmentation in vulnerable biodiversity hotspots in Tanzania from 1975 to 2012 using remote sensing and fragstats. Nat. Conserv. 2016, 16, 19. [Google Scholar]
- Midha, N.; Mathur, P. Assessment of forest fragmentation in the conservation priority Dudhwa landscape, India using FRAGSTATS computed class level metrics. J. Indian Soc. Remote Sens. 2010, 38, 487–500. [Google Scholar] [CrossRef]
- Singh, S.K.; Pandey, A.C.; Singh, D. Land use fragmentation analysis using remote sensing and Fragstats. In Remote Sensing Applications in Environmental Research; Springer: Berlin, Germany, 2014; pp. 151–176. [Google Scholar]
- Carranza, M.L.; Frate, L.; Acosta, A.T.; Hoyos, L.; Ricotta, C.; Cabido, M. Measuring forest fragmentation using multitemporal remotely sensed data: Three decades of change in the dry Chaco. Eur. J. Remote Sens. 2014, 47, 793–804. [Google Scholar] [CrossRef]
- Linh, N.; Erasmi, S.; Kappas, M. Quantifying land use/cover change and landscape fragmentation in Danang City, Vietnam: 1979–2009. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, B8. [Google Scholar] [CrossRef] [Green Version]
- Singh, S.K.; Srivastava, P.K.; Szabó, S.; Petropoulos, G.P.; Gupta, M.; Islam, T. Landscape transform and spatial metrics for mapping spatiotemporal land cover dynamics using Earth Observation data-sets. Geocarto Int. 2017, 32, 113–127. [Google Scholar] [CrossRef] [Green Version]
- Tapia-Armijos, M.F.; Homeier, J.; Espinosa, C.I.; Leuschner, C.; de la Cruz, M. Deforestation and forest fragmentation in South Ecuador since the 1970s–losing a hotspot of biodiversity. PLoS ONE 2015, 10, e0133701. [Google Scholar] [CrossRef] [Green Version]
- Malhi, R.K.M.; Anand, A.; Mudaliar, A.N.; Pandey, P.C.; Srivastava, P.K.; Sandhya Kiran, G. Synergetic use of in situ and hyperspectral data for mapping species diversity and above ground biomass in Shoolpaneshwar Wildlife Sanctuary, Gujarat. Trop. Ecol. 2020, 61, 106–115. [Google Scholar] [CrossRef]
- Christian, B.; Krishnayya, N. Discrimination of floor cover of dry deciduous forest using Hyperion (EO-1) data. J. Indian Soc. Remote Sens. 2008, 36, 137–148. [Google Scholar] [CrossRef]
- Pradeepkumar, G.; Prathapasenan, G. Floristic Diversity and Biotic Pressure in Shoolpaneshwar Wildlife Sanctuary, Gujarat. In Chapter in Air Pollut. Dev. What Cost? Daya Publishing House: Delhi, India, 2003; pp. 148–159. [Google Scholar]
- Lillesand, T.; Kiefer, R.W.; Chipman, J. Remote Sensing and Image Interpretation; John Wiley & Sons: New York, NY, USA, 2015. [Google Scholar]
- Srivastava, P.K.; Malhi, R.K.M.; Pandey, P.C.; Anand, A.; Singh, P.; Pandey, M.K.; Gupta, A. Revisiting hyperspectral remote sensing: Origin, processing, applications and way forward. In Hyperspectral Remote Sensing; Elsevier: Amsterdam, The Netherlands, 2020; pp. 3–21. [Google Scholar]
- Congalton, R.G.; Mead, R.A. A quantitative method to test for consistency and correctness in photointerpretation. Photogramm. Eng. Remote Sens. 1983, 49, 69–74. [Google Scholar]
- Anand, A.; Singh, S.K.; Kanga, S. Estimating the change in Forest Cover Density and Predicting NDVI for West Singhbhum using Linear Regression. Int. J. Environ. Rehabil. Conserv. 2018, 9, 193–203. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Yuan, F.; Bauer, M.E.; Heinert, N.J.; Holden, G.R. Multi-level land cover mapping of the Twin Cities (Minnesota) metropolitan area with multi-seasonal Landsat TM/ETM+ data. Geocarto Int. 2005, 20, 5–13. [Google Scholar] [CrossRef]
- Arsanjani, J.J.; Helbich, M.; Kainz, W.; Boloorani, A.D. Integration of logistic regression, Markov chain and cellular automata models to simulate urban expansion. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 265–275. [Google Scholar] [CrossRef]
- McGarigal, K. FRAGSTATS: Spatial Pattern Analysis Program for Categorical Maps. Computer Software Program Produced by the Authors at the University of Massachusetts, Amherst. Available online: http://www.umass.edu/landeco/research/fragstats/fragstats.html (accessed on 9 July 2020).
- Armenteras, D.; Gast, F.; Villareal, H. Andean forest fragmentation and the representativeness of protected natural areas in the eastern Andes, Colombia. Biol. Conserv. 2003, 113, 245–256. [Google Scholar] [CrossRef]
- Imbernon, J.; Branthomme, A. Characterization of landscape patterns of deforestation in tropical rain forests. Int. J. Remote Sens. 2001, 22, 1753–1765. [Google Scholar] [CrossRef]
- Araya, Y.H.; Cabral, P. Analysis and modeling of urban land cover change in Setúbal and Sesimbra, Portugal. Remote Sens. 2010, 2, 1549–1563. [Google Scholar] [CrossRef] [Green Version]
- Stanturf, J.A.; Palik, B.J.; Dumroese, R.K. Contemporary forest restoration: A review emphasizing function. For. Ecol. Manag. 2014, 331, 292–323. [Google Scholar] [CrossRef]
- Vásquez-Grandón, A.; Donoso, P.J.; Gerding, V. Forest degradation: When is a forest degraded? Forests 2018, 9, 726. [Google Scholar] [CrossRef] [Green Version]
- Davidar, P.; Sahoo, S.; Mammen, P.C.; Acharya, P.; Puyravaud, J.-P.; Arjunan, M.; Garrigues, J.P.; Roessingh, K. Assessing the extent and causes of forest degradation in India: Where do we stand? Biol. Conserv. 2010, 143, 2937–2944. [Google Scholar] [CrossRef]
- Kiran, G.S.; Baria, P.; Malhi, R.K.M.; Revdandekar, A.V.; Mudaliar, A.N.; Joshi, U.B.; Shah, K.A. Site Suitability Analysis for JFM Plantation Sites using Geo-Spatial Techniques. Int. J. Adv. Remote Sens. GIS 2015, 4, 920–930. [Google Scholar] [CrossRef]
- Malhi, R.K.M.; Kiran, G.S. Impact of Joint Forest Management strategy on fertility of forest soils. Bull. Environ. Sci. Res. 2013, 2, 7–11. [Google Scholar]
- Bhatt, G.; Kushwaha, S.; Nandy, S.; Bargali, K.; Nagar, P.; Tadvi, D. Analysis of fragmentation and disturbance regimes in south Gujarat forests, India. Trop. Ecol. 2015, 56, 275–288. [Google Scholar]
- Kayiranga, A.; Kurban, A.; Ndayisaba, F.; Nahayo, L.; Karamage, F.; Ablekim, A.; Li, H.; Ilniyaz, O. Monitoring forest cover change and fragmentation using remote sensing and landscape metrics in Nyungwe-Kibira park. J. Geosci. Environ. Prot. 2016, 4, 13–33. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Unit/ Range | Level of Analysis | Formula | Explanation | ||
|---|---|---|---|---|---|---|
| P | C | L | ||||
| Total Area (TA) | ha | ✔ | TA = A(1/10000) | Area of each patch or class or landscape | ||
| Mean Area (AREA) | ha | ✔ | AREA = aij(1/10000) | The average size of the patches of the corresponding forest type. Smaller mean patch size indicates more fragmented forest | ||
| Core Area (CORE) | ha | ✔ | It is the area in the patches which is within the depth of edge distance from the patch perimeter of the corresponding forest type. The core area decreases with the increase in fragmentation. | |||
| No of Patches (NP) | - | ✔ | ✔ | ✔ | ni | It is the total number of patches of corresponding patch class. More the patch more will be the fragmentation. |
| Patch Density (PD) | Patches/100 ha | ✔ | ✔ | PD =(ni/A)*(10000)*(100) | It is simply the total number of patches per 100 hectares of area. Higher the patch density higher will be the fragmentation. | |
| Edge Density (ED) | m/ha | ✔ | ED = | It is the sum of edge segment length of corresponding patch type divided by the total patch area. A high ED value represents a higher degree of fragmentation. When the whole landscape is composed of only one patch, the ED value will approach zero. | ||
| Radius of Gyration (GYRATE) | ✔ | ✔ | GYRATE = | It is the mean distance between cell and the centroid of the patch. Increase in Gyrate indicates increase in patch size that indicates reduction in fragmentation | ||
| Perimeter Area Ratio (PARA) | >0 | ✔ | ✔ | It is the ratio of patch perimeter and area. Lower the PARA higher will be the fragmentation and vice versa. | ||
| Contiguity Index (CONTIG) | 0–1 | ✔ | It is the spatial interconnections between neighboring pixels. It varies from 0 to 1, where 0 indicates single pixel patch whereas higher value indicates more patch interconnection. Higher the CONTIG lower will be the fragmentation | |||
| Interspersion Juxtaposition Index (IJI) | % | ✔ | ✔ | IJI defines the interspersion of a given patch by estimating the observed interspersion over maximum possible interspersion. Lower the interspersion lower will be the fragmentation. | ||
| Proportion of Like Adjacencies (PLADJ) | % | ✔ | PLADJ calculates the number of like adjacencies divided by the total cell adjacencies, it also involves the focal class. It varies from 0 to 100, where 0 represents the patch with maximum disaggregation. Lower the PLADJ higher will be the fragmentation. | |||
| Aggregation Index (AI) | % | ✔ | ✔ | It is the like adjacencies of a particular class divided by the maximum possible like adjacencies of that particular class. It ranges from 0 to 100, where 0 indicates more disaggregation. Lower the AI more is the fragmentation. | ||
| Clumpiness (CLUMPY) | −1 to 1 | ✔ | Where, | It is the proportion of like adjacencies (Gi) minus proportion of landscape of focal class. Lower value of CLUMPY indicates higher fragmentation whereas higher value shows less fragmentation. | ||
| Normalized Land Shape Index (NLSI) | ✔ | It is the total perimeter of a corresponding class minus the minimum observed perimeter divided by the difference of maximum and minimum perimeter of class. Lower the NLSI value lower will be the fragmentation and vice versa. | ||||
| Euclidean Nearest Neighbor (ENN) | m | ✔ | ✔ | It is the sum of all corresponding patch type divided by the total number of same patch type. Lower the ENN value higher will be the fragmentation and vice versa | ||
| Landscape Shape Index (LSI) | ✔ | It is the total edge length divided by the minimum possible length of class edge. The lowest value 1 shows a very compact patch that is less fragmentation whereas higher the LSI value higher will be the fragmentation. | ||||
| Dense Forest | ||||||||
| Patch Size | TA (ha) | NP | ||||||
| 1998 | 2008 | 2018 | 2028 | 1998 | 2008 | 2018 | 2028 | |
| 0–100 | 4839.57 | 4244.49 | 6800.58 | 6616.98 | 1733 | 1426 | 1412 | 872 |
| 100–500 | 2856.15 | 3274.65 | 4357.35 | 3980.16 | 11 | 12 | 23 | 19 |
| 500–1000 | 1195.02 | 3157.11 | 786.15 | 953.19 | 2 | 4 | 1 | 1 |
| 1000–2000 | 2572.38 | 1483.02 | 1089.18 | 0 | 2 | 1 | 1 | 0 |
| >2000 | 14,148.72 | 3629.07 | 0 | 0 | 1 | 1 | 0 | 0 |
| Open Forest | ||||||||
| Patch Size | TA (ha) | NP | ||||||
| 1998 | 2008 | 2018 | 2028 | 1998 | 2008 | 2018 | 2028 | |
| 0–100 | 6454.62 | 8174.25 | 6653.07 | 4901.04 | 3031 | 3295 | 2713 | 1399 |
| 100–500 | 471.78 | 4989.24 | 3761.46 | 2470.23 | 3 | 24 | 15 | 11 |
| 500–1000 | 0 | 2379.96 | 921.15 | 2105.1 | 0 | 3 | 1 | 4 |
| 1000–2000 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| >2000 | 0 | 0 | 4580.64 | 6598.44 | 0 | 0 | 1 | 1 |
| Degraded Forest | ||||||||
| Patch Size | TA (ha) | NP | ||||||
| 1998 | 2008 | 2018 | 2028 | 1998 | 2008 | 2018 | 2028 | |
| 0–100 | 6621.57 | 5418.72 | 5846.58 | 4975.2 | 3002 | 2534 | 2397 | 1358 |
| 100–500 | 3443.22 | 2618.73 | 2263.05 | 4774.32 | 17 | 10 | 11 | 15 |
| 500–1000 | 4262.49 | 1401.03 | 1336.95 | 2163.51 | 6 | 2 | 2 | 3 |
| 1000–2000 | 2156.31 | 0 | 2962.08 | 1706.94 | 2 | 0 | 2 | 1 |
| >2000 | 9804.96 | 20,867.67 | 20,245.5 | 20,717.64 | 2 | 3 | 3 | 3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malhi, R.K.M.; Anand, A.; Srivastava, P.K.; Kiran, G.S.; P. Petropoulos, G.; Chalkias, C. An Integrated Spatiotemporal Pattern Analysis Model to Assess and Predict the Degradation of Protected Forest Areas. ISPRS Int. J. Geo-Inf. 2020, 9, 530. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9090530
Malhi RKM, Anand A, Srivastava PK, Kiran GS, P. Petropoulos G, Chalkias C. An Integrated Spatiotemporal Pattern Analysis Model to Assess and Predict the Degradation of Protected Forest Areas. ISPRS International Journal of Geo-Information. 2020; 9(9):530. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9090530
Chicago/Turabian StyleMalhi, Ramandeep Kaur M., Akash Anand, Prashant K. Srivastava, G. Sandhya Kiran, George P. Petropoulos, and Christos Chalkias. 2020. "An Integrated Spatiotemporal Pattern Analysis Model to Assess and Predict the Degradation of Protected Forest Areas" ISPRS International Journal of Geo-Information 9, no. 9: 530. https://0-doi-org.brum.beds.ac.uk/10.3390/ijgi9090530