The Efficacy of Operational Bird Strike Prevention
by
 , ,
, ,
Isabel C. Metz
1,2,* ,
,
Joost Ellerbroek
1,
Thorsten Mühlhausen
2,
Dirk Kügler
2,
Stefan Kern
2 and
Jacco M. Hoekstra
1 1
Control and Simulation Department, Faculty of Aerospace Engineering, Delft University of Technology, Kluyverweg 1, 2629 HS Delft, The Netherlands
2
Institute of Flight Guidance, German Aerospace Center (DLR), Lilienthalplatz 7, 38108 Braunschweig, Germany
*
Author to whom correspondence should be addressed.
Aerospace 2021, 8(1), 17; https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8010017
Submission received: 11 November 2020
/
Revised: 2 December 2020
/
Accepted: 16 December 2020
/
Published: 14 January 2021
(This article belongs to the Collection Air Transportation—Operations and Management)
Abstract
:Involving air traffic controllers and pilots into the bird strike prevention process is considered an essential step to increase aviation and avian safety. Prior to implementing operational measures such as real-time warning systems, it is vital to evaluate their feasibility. This paper studies the efficacy of a bird strike advisory system for air traffic control. In addition to the potential safety benefit, the possible impact on airport operations is analyzed. To this end, a previously developed collision avoidance algorithm underlying the system was tested in fast-time Monte Carlo simulations involving various air traffic and bird densities to obtain representative conclusions for different operational conditions. The results demonstrate the strong safety potential of operational bird strike prevention in case of precise bird movement prediction. Unless airports operate close to their capacity limits while bird abundance is high, the induced delays remain tolerable. Prioritization of hazardous strikes involving large individuals as well as flocks of birds are expected to support operational feasibility in all conditions.
1. Introduction
The simultaneous use of airspace by birds and aircraft has impaired avian and aviation safety since the beginning of aviation. Collisions between these two airspace users affect aviation operations, cause damage and can even result in a crash of the involved aircraft [1]. The risk of bird strikes is largest below 1000 m. Approximately 92% of all strikes occur below this height [2,3]. Consequently, measures to prevent bird strikes are most relevant for aircraft in the low-level flight phases take-off, climb, approach and landing. Current procedures in place mainly focus on keeping birds off the airport perimeters [4]. Hence, they do not affect birds flying beyond the airport boundaries. This geographical limitation in bird strike prevention is especially critical for departing aircraft. Due to increasing speeds and high thrust settings, aircraft are most vulnerable to substantial damage during take-off and initial climb [5]. Especially collisions with large individuals or flocks of birds have caused severe incidents as well as accidents [1]. To extend the horizon of bird strike prevention to the departure corridors, operational measures involving pilots and air traffic controllers have been discussed [3].
This paper addresses the implementation of a bird strike advisory system for air traffic control at an airport. Based on real-time bird movement information from the surrounding area, the system calculates the risk of collisions between aircraft and presents it in a suitable manner to the controller who can give dedicated warnings to pilots. In addition to providing enhanced situational awareness for pilots in low-level flight and approaching the airport, the controller can delay take-offs in case of high collision risk.
To consider an implementation of a bird strike advisory system, its ability to prevent bird strikes has to be evaluated first. Moreover, potential impacts on airport operations and runway throughput have to be analyzed. In a previous study, a collision avoidance algorithm underlying such a system was introduced [6]. Operational intervention by the controller is most feasible for departures, which are in addition most vulnerable to bird strike damage. Hence, the algorithm targets at delaying take-offs in order to prevent strikes. The initial study focused on the implementation of the algorithm and verified it with a limited data set. The here presented work performed large-scale fast-time Monte Carlo simulations involving varying air traffic and bird densities to gain a comprising insight on the potential effects of the algorithm on airport safety and capacity. This will provide first implications for the feasibility of operational bird strike control.
In this study, perfect predictability of bird movement is assumed for two reasons. First, it is necessary to exclude side-effects from predicting bird movements when verifying the algorithm’s correct implementation. Second, to achieve a benchmark for the potential of the concept of operational bird strike prevention, the algorithm’s outcome under perfect conditions is required. A more realistic implementation including the limited predictability of bird movement can then be compared and judged against the result of this study.
It is hypothesized that the here presented algorithm strongly reduces bird strikes. Considering runway capacity, an increasing impact with rising intensities of air traffic and bird movements is expected. However, due to the optimized implementation, it is anticipated that delays for all air traffic scenarios remain within acceptable limits.
2. Material and Methods
This paper aims at a thorough study on the consequences on runway safety and capacity when implementing a bird strike advisory system for airport air traffic control. To validate the concept with representative results, Monte Carlo simulations involving different air traffic intensities, flight plan patterns as well as variation in bird abundance were performed. This section first introduces the logic of the collision avoidance algorithm underlying the bird strike advisory system. Subsequently, the configuration of the Monte Carlo simulations and the applied specifications are described.
2.1. Collision Avoidance Algorithm
The presented collision avoidance algorithm is conceptually comparable to the Airborne Collision Avoidance System (ACAS) which aims at the prevention of mid-air collisions between aircraft [7]. Based on an information received from the Secondary Surveillance Radar (SSR) transponders of the aircraft, the time to and minimum distance at the Closest Point of Approach (CPA) between the two trajectories are predicted. The time to CPA and fixed altitude thresholds shape the protected volume of aircraft. They are divided into a caution, a warning and a collision area. If the caution area is intruded by another aircraft, a traffic advisory is issued to both aircraft. In case of a penetration of the warning area, resolution advisories to eliminate the conflict are provided [7].
When considering collision avoidance between birds and aircraft, this logic can be applied as well. However, due to the differences in size, velocity and number of opponents in aircraft-bird collision avoidance, some adaptations have to be considered for the implementation of a respective algorithm.
First, the requirement for the number of potential opponents to process is limited in ACAS. Implementations have to be able to process up to 24 aircraft in a 10-kilometer radius [7]. In contrast, thousands of birds and thus potential opponents can be airborne in an airport’s departure corridor [8]. Hence, strong filtering for critical opponents has to be performed to comply with run-time- and memory-limitations.
Second, the required protected volumes around the opponents are much smaller in bird strike prevention than in aircraft-aircraft collision avoidance. In ACAS, the horizontal size of protected volumes can extend to 26 kilometres to account for the high approaching speeds of opponents [7]. In contrast, tens of metres are required in collision avoidance between aircraft and birds. Consequently, high precision of the predicted trajectories is required to enable correct collision identification.
ACAS relies on an information exchange between on-board transponders. For area-covering and real-time movement information of birds in the extended airport environment, ground-based sensors such as radar, visual or infrared video have to be used. Hence, the spatial extension as well as the look ahead time are limited by the range of the chosen sensor. Since the intentions of birds are unknown, an estimate of their future flight path has to be made. Thereby, their potential reactions to aircraft have to be taken into account [9]. Since the kinetic energy of the impact of a collision with a bird increases with increasing involved biomass, especially large individuals and flocks of birds are threatening. For prioritization, the chosen sensors acquiring bird movement information should be able to classify birds in weight categories.
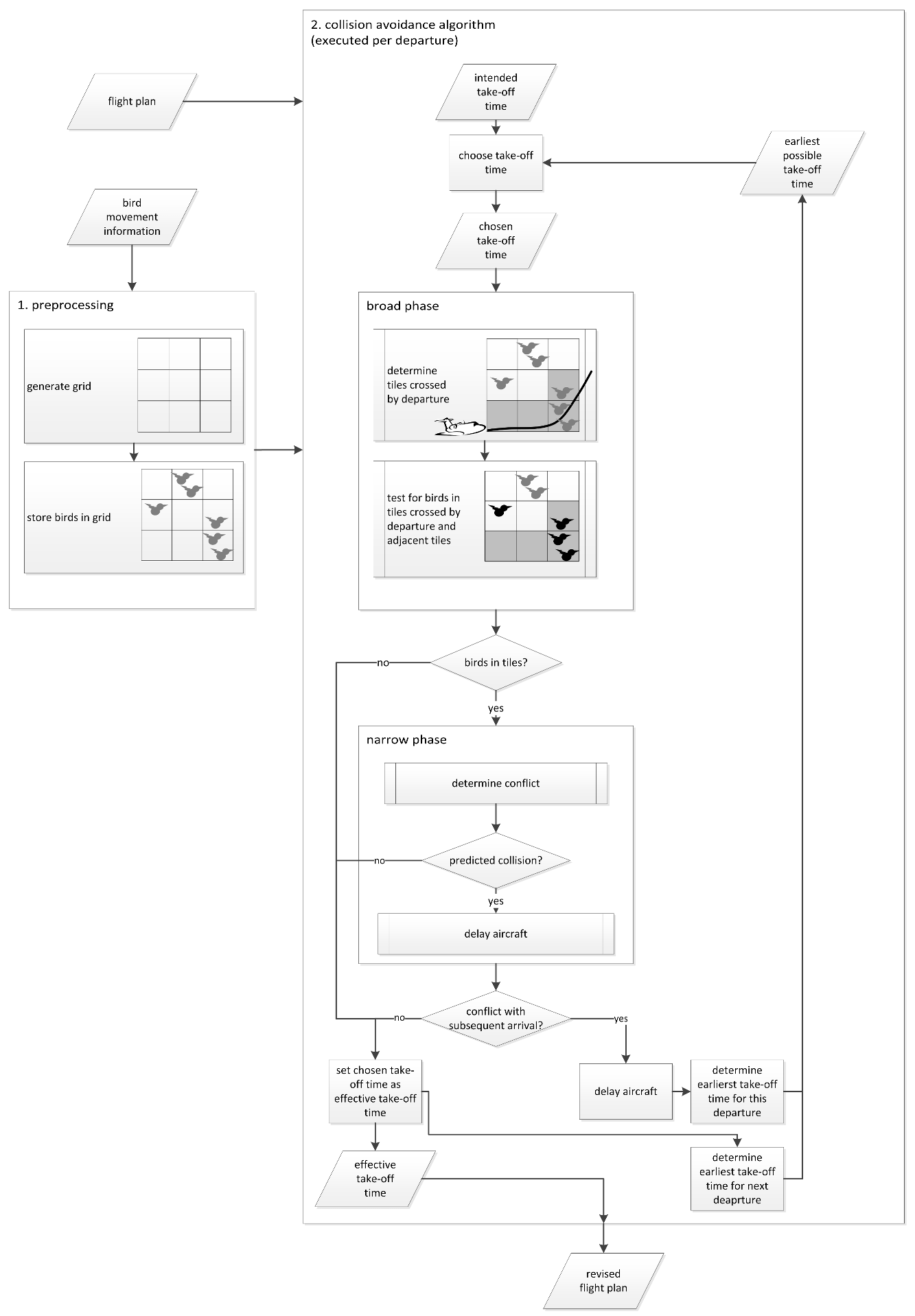
Considering these factors, a collision avoidance algorithm for operational bird strike prevention was developed [6]. It builds on the aircraft-aircraft collision avoidance algorithm of Kuenz (2015, [10]). This algorithm aims at large-scale scenarios, resolving aircraft-aircraft conflicts on a global level. Hence, it is optimized to compare large numbers of opponents, as required for the implementation targeting the prevention of collisions between aircraft and birds. The optimization is achieved by dividing the collision detection into two phases. In the first, the broad phase, the airspace is filtered for aircraft that are likely to conflict with the own ship. For this purpose, the airspace is split into a grid consisting of n-dimensional tiles. Only if the trajectories of the other aircraft and the own aircraft cross identical or neighbouring tiles, the other aircraft is considered as potential opponent. In the second, the narrow phase, a high-precision trajectory comparison is performed for the effective collision detection on the filtered opponents only.
For the here presented adaptation of the collision avoidance algorithm for the prevention of bird strikes, the airspace is discretized in the four dimensions time, latitude, longitude and altitude. Figure 1 displays the subsequently described steps performed. The algorithm is provided with flight plans as well as bird movement information of entire days. Based on their positions obtained from tracking sensors, birds are stored in the tiles of the grid in the preprocessing step. Every scheduled departure is tested against the birds present at the intended take-off time. For this purpose, the tiles which will be crossed by the aircraft, are determined based on its predicted trajectory in the broad phase. Only birds stored in these or in their neighbouring tiles will be considered for collision-detection in the narrow phase. The latter are included to account for aircraft and birds flying close to the boundaries of their tiles (cf. [10]). To identify collisions, the predicted trajectories of the respective birds and the aircraft are compared. If the comparison reveals that they will penetrate the protected zone of each other, the aircraft receives a take-off delay to avoid the collision. Thereby, separation minima to subsequent aircraft are considered. To avoid go-arounds for arrivals, they are given priority. If the delay of a departure leads to a loss of separation with the subsequent arrival, the departing aircraft is scheduled to depart behind the arrival. This can result in domino-effects for following departures. The output of the algorithm is a rescheduled flight plan for the considered traffic day. Figure 1 shows the steps performed within the algorithm.
2.2. Specifications
Air traffic flight plans of a single runway airport and information about bird movement to be used as input for the collision avoidance algorithm were generated as described below.
Flight plans for single runway operations were generated for an airport with high traffic intensity, containing 900 flights per day, as well as one with medium traffic intensity, containing 500 flights per traffic day. These intensities have proven to be most critical considering the algorithm’s runway impact [6]. To obtain various scenarios for the Monte Carlo simulations, flight plans with various traffic shares and schedules were generated with the tool Computing Runway Capacity Enhancements [11]. The main focus of this tool lies on runway capacity analysis. For this study, its module to randomize flight plans for a defined number of aircraft was used. To randomize flight plans, the sequence of departures and arrivals is defined in a first step. Subsequently, separations between the aircraft are calculated based on various parameters such as minimum separation, aircraft and airport characteristics as well as human factors. An overview of all parameters and applied distributions can be found in [12]. For this study, the flights were spread over a period of 18 h with a minimum separation of 66 s between aircraft. To generate sequences meeting these requirements, specific distributions for the parameters separation buffer in aircraft separation as well as a reaction time of controller or pilots were applied. These can be found in Table 1. Departing aircraft were randomly assigned to one of four Standard Instrument Departure Routes. Following this procedure, 1000 scenarios for each of the departure shares 25%, 50%, 75% and 100%, were generated, leading to 4000 scenarios for the high and medium traffic intensities, respectively.
Bird movement is represented in Bird Movement Plans (BMPs). To include bird movement up to 1000 m, where the risk of bird strikes is highest [3], two sources were used. From ground to 200 m, bird tracks were obtained from an horizontal X-band avian radar, located at Eindhoven airport (NL). In the vertical range from 200 m to 1000 m, which lies beyond the range of the avian radar, bird densities were obtained from the C-band Doppler weather radar in De Bilt (NL) and transformed to individual bird tracks. The radar specifications and the procedure to generate bird tracks suitable as input for the simulation are described in an earlier study [14]. By following the procedure developed in that research, three BMPs represent bird tracks of small, medium and large birds as well as flocking birds were created. The number of simulated bird strikes has been shown to be overestimated by a factor of three in a previous study [15]. This was mainly attributed to exclusion of bird reactions to aircraft as observed in reality [9]. In addition, the airport of Eindhoven where the data originates from has low air traffic activity. Hence, more bird activity on the runway takes place than it would be observed on busy airports [16]. Consequently, the influence of the algorithm will be larger than it would be for realistic bird strike numbers.
Combining the three BMPs with the 8000 flight plans from the two air traffic intensities leads to 24,000 scenarios for the Monte Carlo simulations.
The collision avoidance algorithm itself was configured as described below. Since the goal of this study is to evaluate the algorithm under ideal conditions, aircraft and bird trajectories were considered as perfectly predictable. Aircraft trajectories were stored based on simulation logs from the simulation environment BlueSky Open Air Traffic Simulator. This tool was also used for the Monte Carlo simulations of the initial and revised flight plans. BlueSky has been developed at Delft University of Technology to analyze air traffic flows and air traffic management concepts [17]. It was enhanced to represent bird movements and detect collisions between birds and aircraft, as previously described. [14]. Both versions are available on GitHub [18,19].
Aircraft performance within the simulation was represented by the Base of Aircraft Data (BADA) 3.12 implementation. All aircraft were simulated as Airbus A320-200 aircraft. A logging frequency of 20 Hz for the lift-off phase between 0 and 15 m and a frequency of 2 Hz for the remaining flight phases was used for the trajectory representation within the algorithm. The increased frequency during lift-off was used to account for strong changes in vertical velocity in that phase. This combination has proven to be a good trade-off between sufficient precision and minimum memory cost [6]. Birds were stored in the grid based on all positions provided in the BMP. Thereby, birds of all weight categories were included to study the effects of an algorithm preventing all potential strikes. The dimensions of the grid tiles amount to 1000 m in latitude and longitude and 100 m in altitude. In the narrow phase of the algorithm, linear interpolation between recorded bird and aircraft positions was applied. There, the trajectories were tested with a sampling rate of 20 Hz. Consequently, conflicts lasting at least 50 ms were detected. Conflicts lasting less could go undetected due to the selected sampling rate. The algorithm considered the tracks of all birds airborne at the intended take-off time. Birds that got airborne after the aircraft started rolling were not visible to the algorithm. Therefore, collisions caused by such birds could not be prevented.
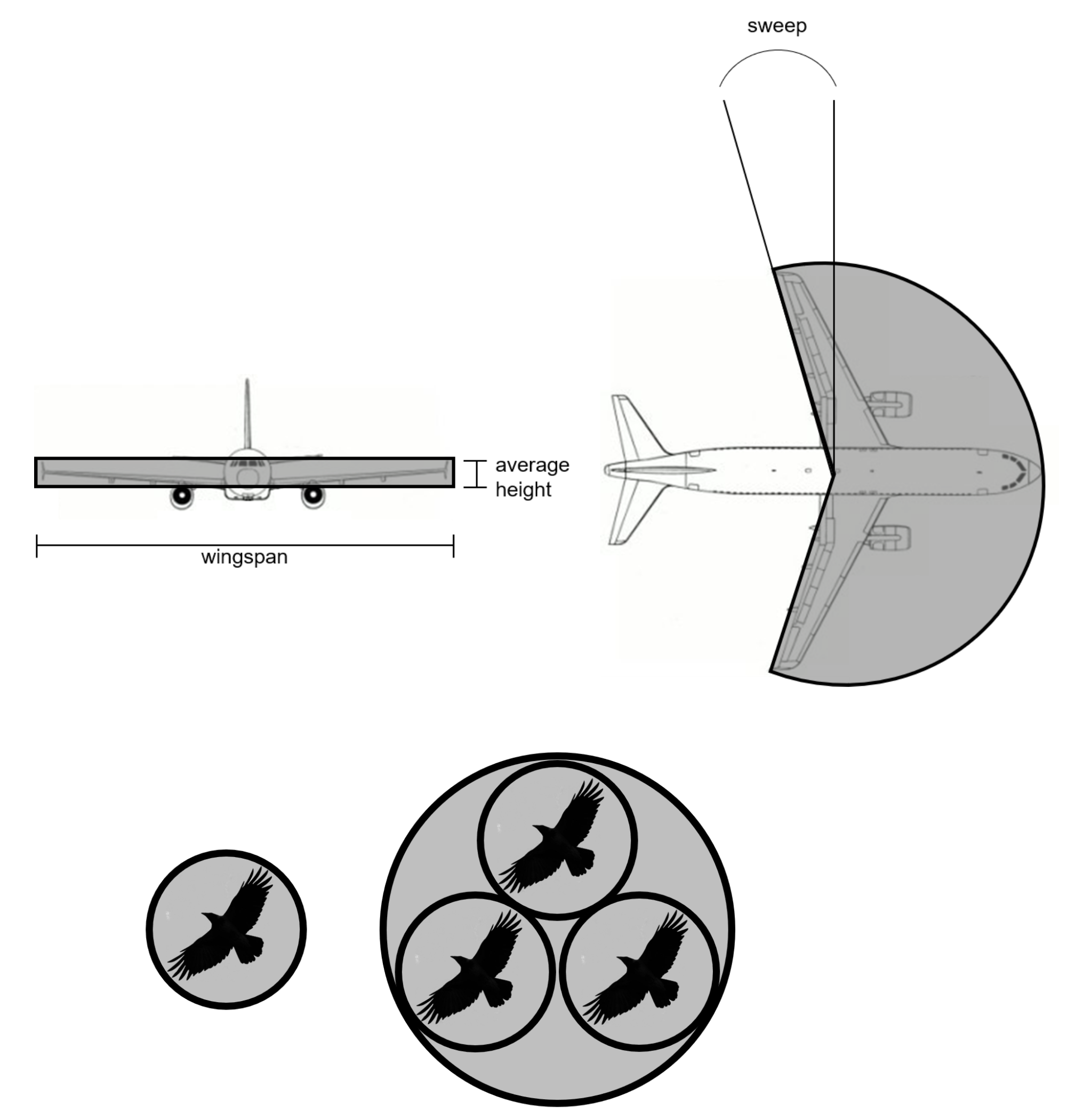
The protected volumes were defined as geometrical shapes around aircraft and birds. Due to the small look-ahead times, the protected volumes only consisted of a collision area, leaving out the caution and warning areas as implemented in ACAS. A penetration detected within the narrow phase of the algorithm triggered a take-off delay for the involved departing aircraft. The imposed delay lasted at least five seconds and maximum as long as the bird needed to leave the critical area. Due to their small size, birds have a two-dimensional disc-shaped protected volume and thus, strictly speaking, a protected plane, with no height. Its size depends on the bird’s weight category. The protected panes of flocks were designed as circle, containing the circles of the individual flock members, following the theory of Graham [20]. A detailed description of the modelling method has been described in earlier research [14].
Aircraft are surrounded by a three-dimensional disc, leaving out the rear part of the aircraft, as it barely got hit by birds in reality [2,21]. The resulting shape was similar to a reverse-facing pac-man with the opening angle defined by the wing’s trailing edge sweep. The size of the protected volume depends on the aircraft’s size category. For the Airbus A320-200, which was used as model in this study, the radius amounts to 19.94 m, the height to 1.01 m and the sweep to 25.00. In Figure 2, the protected volumes of birds and aircraft are presented.
When verifying the algorithm with these settings for a limited sample of scenarios [6], it was found that 97% of actual collisions were prevented by the algorithm. For 2% of all strikes, false alerts, i.e., unnecessary warnings, were generated. As missed strikes, they can result from offsets between the effective flight paths and the interpolation taking place in the algorithm due to the chosen sampling rates. By increasing the sampling rates, the accuracy could be improved. However, this would impair run time efficiency. To find a balance between precision and efficiency, different sampling rates were tested in the initial study [6]. There, the algorithm was defined to be sufficiently accurate if it prevented at least 95% of all strikes and generated a maximum of 5% of false alerts. These requirements apply for the here presented study as well.
If the number of airspace users was forecasted to exceed the capacity at airports or en-route, Air Traffic Flow Management (ATFM) slots could be assigned to departing aircraft. The so-called slot tolerance window started five minutes prior and ended 10 min after the assigned departure time [22]. To be able to comply with potential ATFM slots, the maximum tolerable delay due to bird strike prevention amounted to 10 min. The number of delays exceeding 10 min as well as their duration were counted as a performance indicator. Shifts of flights to beyond the opening hours indicated that the airport could not keep up its capacity. Therefore, all aircraft should be able to depart within the assigned airport opening hours.
2.3. Analysis
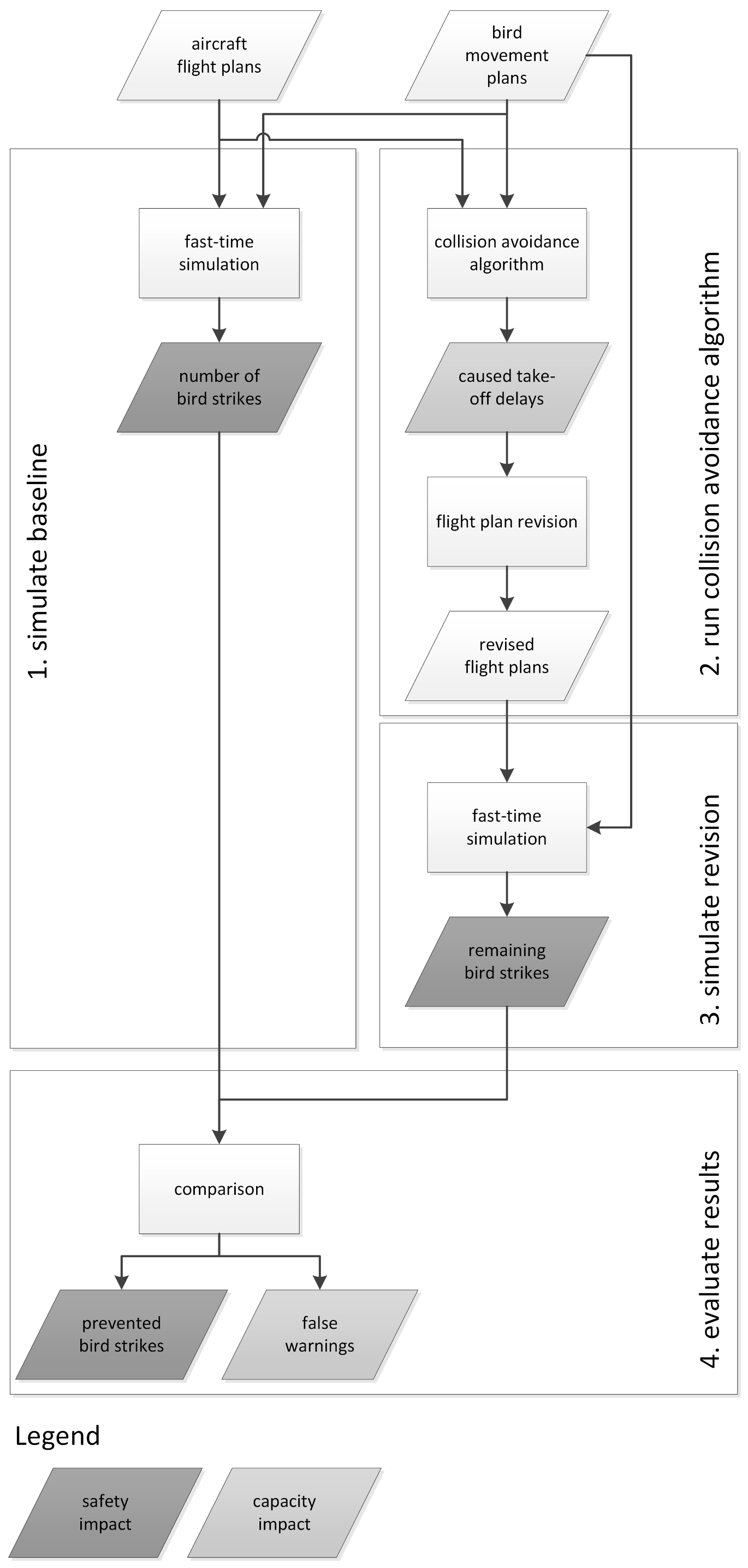
To validate the algorithm and to analyze its effect on runway safety and capacity, the four steps shown in Figure 3 were performed. First, the randomized flight plans were simulated alongside the BMPs in fast-time. The number of strikes recorded indicate, how many strikes can be prevented and as such represent the safety potential of the algorithm.
Second, the collision algorithm was applied on all combinations of flight plans and BMPs, rescheduling departures where necessary. Third, the revised flight plans were simulated alongside the BMPs in BlueSky to test for collisions undetected by the algorithm. To evaluate if the algorithm generates superfluous warnings, it was checked in the fourth step whether the collisions prevented by the algorithm actually did take place in the baseline.
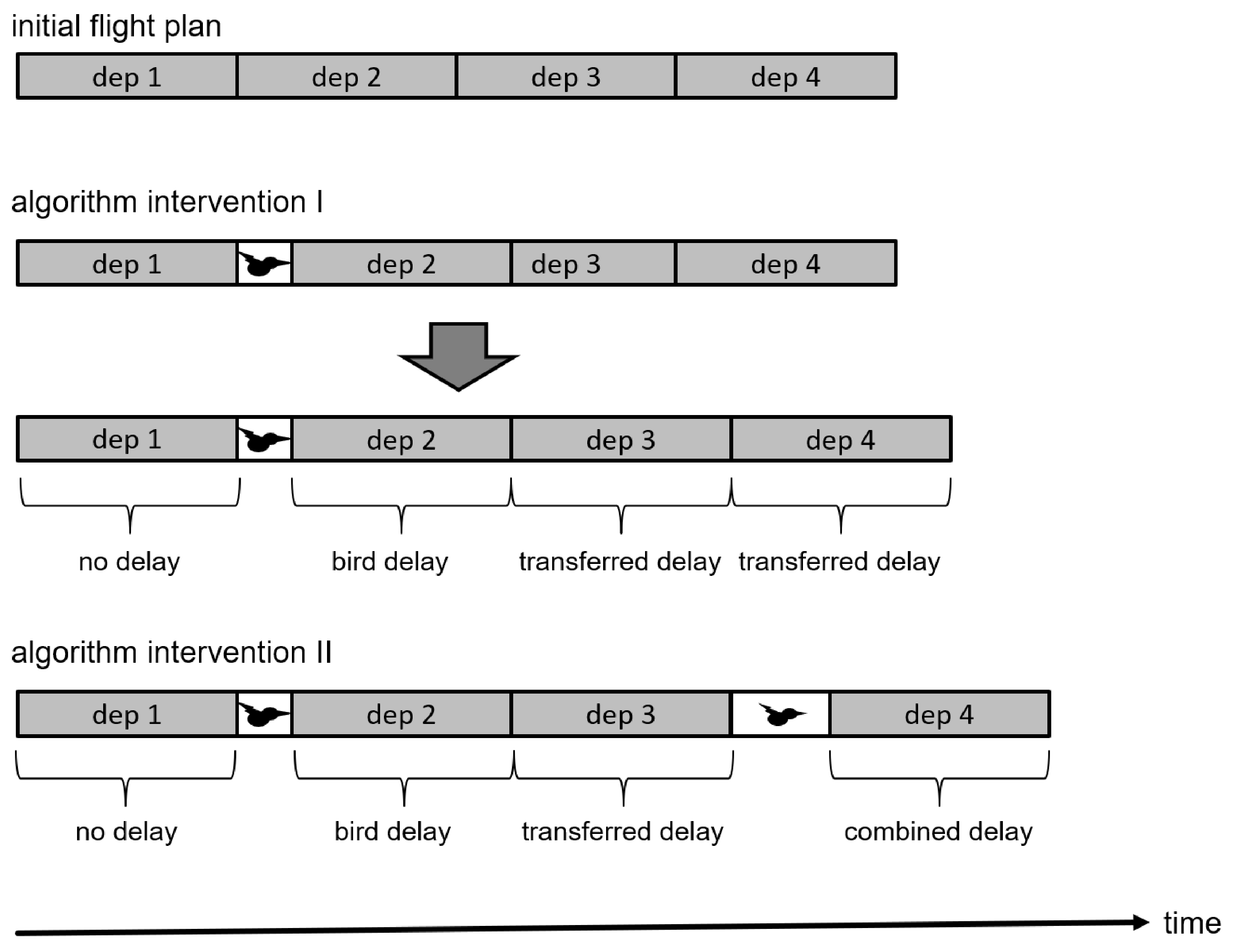
Aircraft delays within the revised flight plan have three potential sources. They can result from an intervention of the collision avoidance algorithm (bird delay) or a domino effect of a previously delayed departure (transferred delay). If an aircraft with a transferred delay has to be further delayed due to bird presence, it experiences a combined delay. The different delay types are presented in Figure 4.
To analyze the shares of correctly prevented strikes and to identify false alerts, only aircraft solely delayed due to birds were considered. Since they did not inherit a delay from a previous aircraft, they encountered the identical bird movements as in the initial flight plans and are therefore comparable.
To analyze the impact on capacity, the delays generated by the collision avoidance algorithm to avoid bird strikes as well as transferred delays for subsequent departures were stored.
3. Results
Previous studies were optimistic regarding the positive effects on avian and aviation safety when implementing operational bird strike prevention [3,23]. In this paper, a collision avoidance algorithm representing the concept of a bird strike advisory system for air traffic control has been analyzed to test these assumptions and to evaluate the potential impact on airport capacity. To obtain representative results for different conditions, Monte Carlo simulations involving 24,000 scenarios of varying air traffic flight plans and bird movement densities were performed.
An initial analysis of the algorithm with the settings used for this study on 252 consolidations of flight plans and BMPs was performed earlier [6]. Therefore, one air traffic day each for high, medium and low air traffic intensities was combined with bird movements from one day per calendar month. 97% of bird strikes were prevented while 2% of unnecessary warnings, related to all strikes, were generated. The results lay within the expected variance due to the selected resolution within the trajectory comparison of the algorithm.
This study aims to validate these results and to perform an in-depth analysis on the algorithm’s effects on capacity and safety. As in the initial study [6], at least 95% of strikes have to be prevented at a maximum of 5% of false alerts. Since the algorithm focuses on departures, only strikes involving these aircraft were included in the analysis.
To evaluate how many strikes were correctly prevented by the algorithm, aircraft that were only delayed because of birds (i.e., without having received a transferred delay), were included. Only these aircraft encountered the same birds in the original as well as the revised flight plan and are therefore comparable. This applied to 92% of aircraft in the revised flight plans, which can be regarded as representative. Based on this precondition, 99.33% of strikes were prevented for departing aircraft when including all scenarios.
To calculate the share of false alerts, the aircraft with a bird delay in the revised flight plans were compared to the collisions taking place prior to the intervention of the algorithm. Aircraft that did not encounter a collision but were delayed due to birds by the algorithm were counted as false alerts. The algorithm generated 0.04% false alerts. The individual values per scenario can be found in Table 2. Furthermore, the averages of the three bird movement intensities per air traffic intensity were calculated. Finally, the averages were calculated for all scenarios. These were weighted with the number of flights per scenario. Therefore, they lie closer to the results from the high air traffic intensity scenarios.
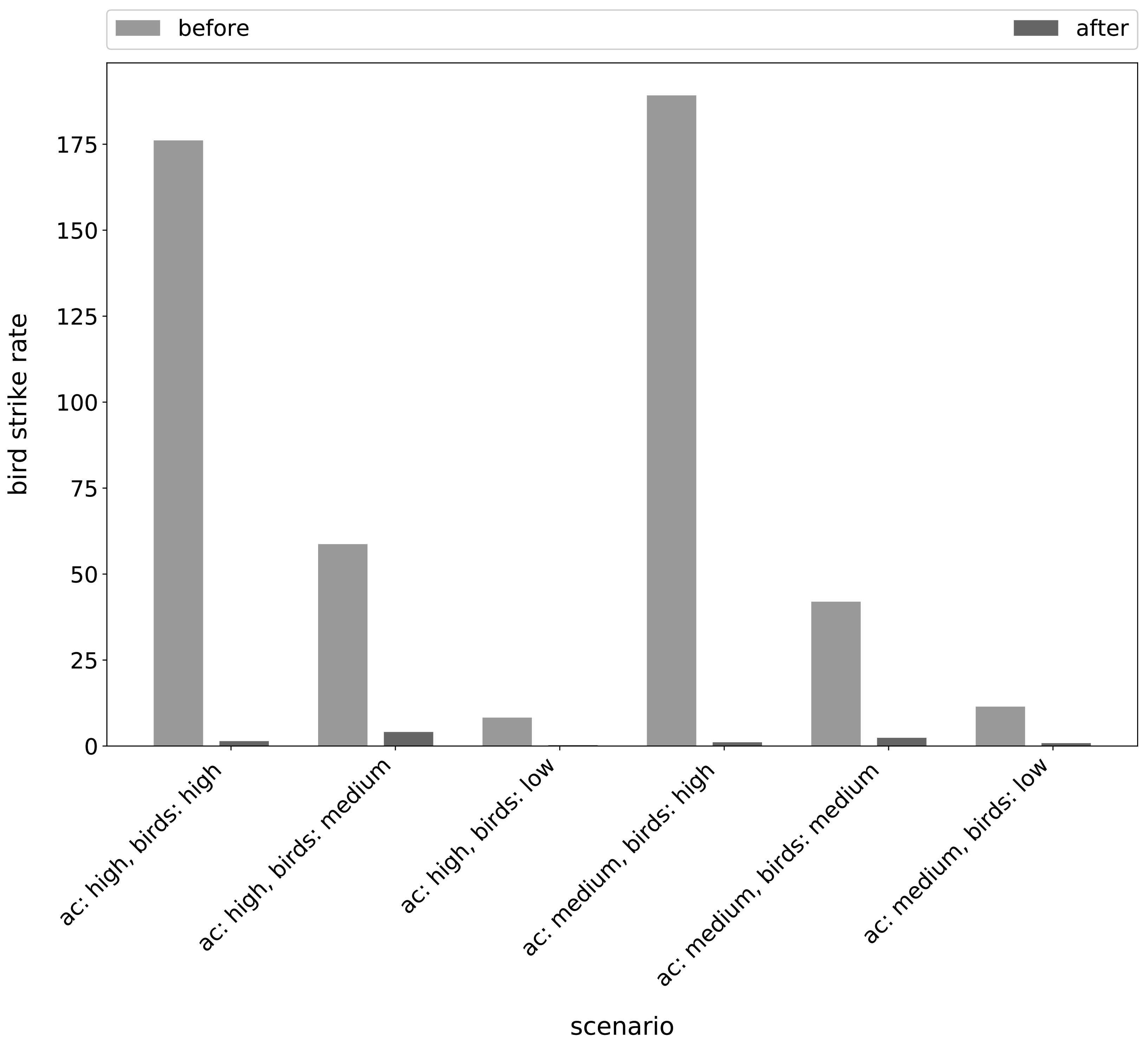
Figure 5 provides an overview of the bird strike rate prior and post the intervention of the collision avoidance algorithm. In contrast to the results presented in Table 2, the strikes of all departing flights are included. Therefore, this figure represents the overall effect on safety. The bird strike rate in number of strikes per 10,000 flights was a common unit to compare bird strike risk among airports [24]. In the context of this study, the bird strike rate is expressed as strikes per 10,000 departures. The initial rates were proportional to the number of air traffic and birds. The algorithm reduced the rates notably but with different efficacy for the individual scenarios, as can be seen in Figure 5. When considering the weighted average of all scenarios, the algorithm lowered the bird strike rate from 63.26 to 1.76 strikes per 10,000 departures. As such, the anticipated strong decrease in bird strike rate was observed.
While the number of strikes prevented serves as measure for the safety effect of the collision avoidance algorithm, the generated delays indicate the impact on runway capacity. Table 3 provides an overview of the delays per scenario as well as for the consolidation of all scenarios. In contrast to the verification, the observed impact on capacity is higher. In the verification, 3% of flights were affected in the high and 0.5% in the medium scenarios. In contrast, the shares amounted to 6% and 1% in this study.
The share of affected aircraft as well as the delay duration decreases with decreasing bird and air traffic. In all scenarios, a limited number of aircraft is affected and the average experienced delay lies well below the tolerance of 10 min. However, in contrast to the verification, individual delays exceeding this tolerance were observed for high air traffic combined with high and medium bird movement intensity. Hence, the hypothesis of acceptable delays in all scenarios cannot fully be supported.
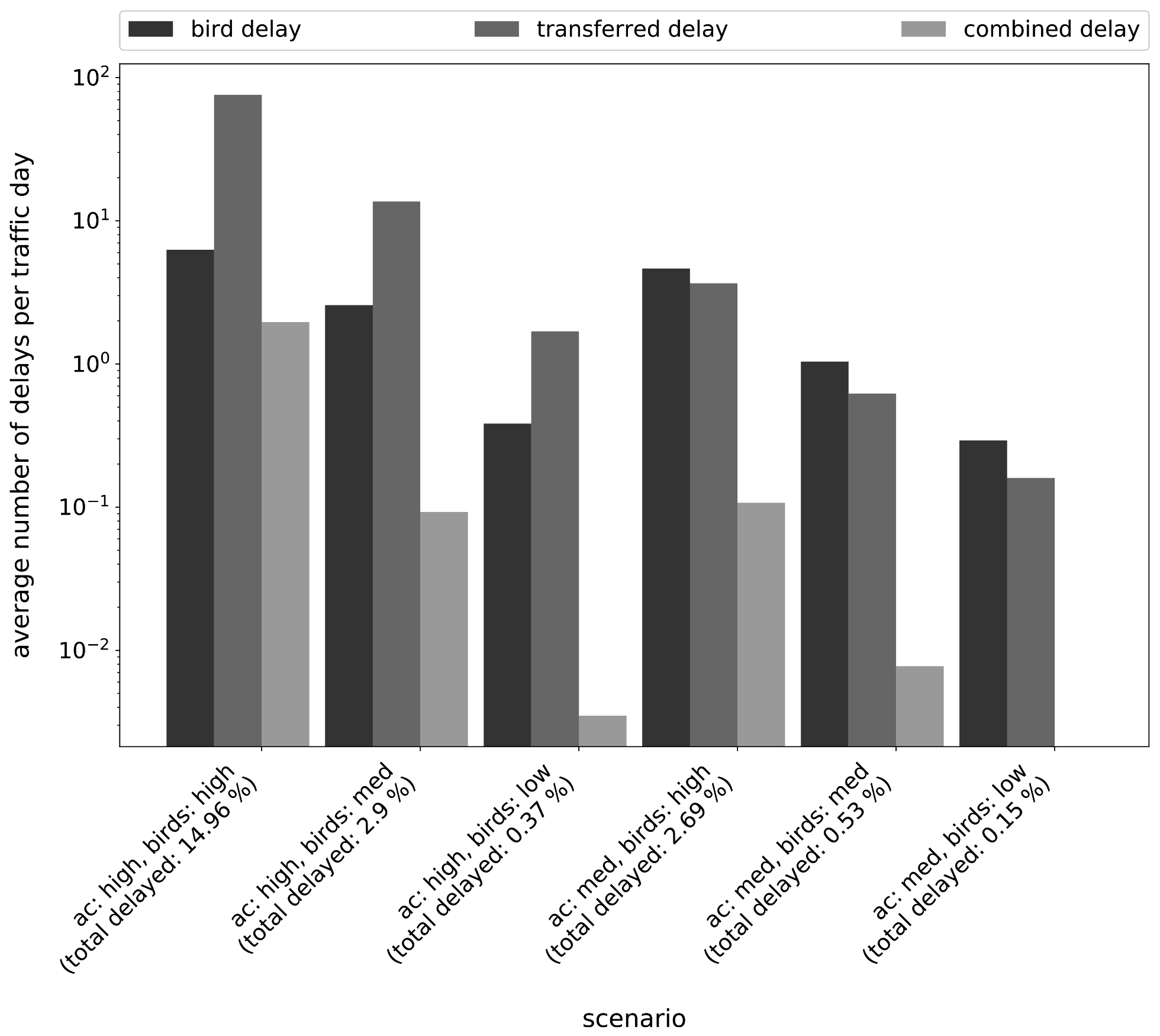
The distribution of delays among the different types bird delay, transferred delay and combined delay is displayed in Figure 6 for all scenarios. While the transferred delays dominate for the high traffic intensity, bird delays build the majority for the medium air traffic scenarios. Combined delays play a minor role in all scenarios.
Over all scenarios, only two aircraft would depart after the assigned opening hours, both when merging medium air traffic with high bird movement intensity. In both cases, the last aircraft of the day was delayed due to bird strike risk, leading to a departure just after the closing hour (99 s and 109 s). Hence, they can be considered as outliers and the requirement of all take-offs remaining within the airport opening hours regarded as fulfilled.
4. Discussion
This study evaluated the feasibility of a bird strike advisory system for air traffic control. Thereby, the focus lay on the effects on safety as well as capacity. The results aim to build a foundation for research investigating the actual implementation of a system including the operational feasibility for controllers and pilots.
The performed Monte Carlo simulations including various bird movement and air traffic patterns demonstrated the potential to remarkably lower the bird strike rate for departing aircraft in case of perfect predictability of bird movement. Hence, the hypothesis of a strong cut in bird strikes can be accepted. Furthermore, the target of 95% of prevented collisions and a maximum of 5% false alerts were fully met for all simulated scenarios.
The impact of the algorithm, both in prevented strikes and consequently in generated delays, was higher than in the verification. Contributing factors might be the variability in flight plans per traffic density, which was not included in the verification. Moreover, the verification only used a limited sample of replications. In contrast, the here obtained results are based on a representative number of scenarios.
The variable efficacy of the algorithm in preventing bird-aircraft collisions per scenario is related to the timing of bird and aircraft departures. In the scenarios where a slightly higher strike rate remained, more birds causing collisions took off after the considered aircraft than in the other scenarios. Since the algorithm only considers birds airborne at the time of intended take off, these strikes were unpreventable, leading to these somewhat higher final strike rates. However, this would also occur in a real-life implementation. Therefore, even with an optimized system as presented here, bird strike rates can be reduced but never eliminated.
The implemented algorithm assumes deterministic, perfectly predictable aircraft and bird movement. Hence, the results presented here display the maximum potential of operational bird strike prevention. They will serve as a baseline for future research including the limited predictability of birds.
The second hypothesis focused on the effect on capacity. Since the algorithm was expected—and has proven—to prevent bird strikes with high precision, the resulting delays were hypothesized to stay within reasonable limits. As a benchmark, ten minutes were set as a maximum acceptable delay to comply with the slot tolerance window of ATFM. In all scenarios, the average delay per affected aircraft stayed well below this limit. However, in some cases considering high air traffic intensity, it was overrun by individual flights by up to 20 min. This was not caused by aircraft delayed to prevent a collision with birds but by transferred delays to later aircraft. Since the schedule was very tight in these scenarios, even a small bird delay could already lead to a domino effect for following aircraft including large delays. This is reflected in Figure 6 which illustrates the high share of transferred delays, exceeding the share of bird delays in the scenarios involving high air traffic density. Consequently, the hypothesis of capacity impact can only be accepted for the medium air traffic scenarios as well as for the high air traffic scenario encountering low bird movement intensity. However, the bird strike rates in these simulations are overestimated by a factor of three, as previously demonstrated, leading to more algorithm interventions than would be expected in reality [15]. Still, the here analyzed algorithm is optimized to prevent all strikes at minimum delay when assuming perfect predictability of bird movement. More realistic implementations that actually forecast bird tracks are expected to generate higher delays due to increased safety buffers. Since individual delays already exceed acceptable ranges in this study, future implementations should be restricted to avoiding only hazardous strikes, to limit the capacity impact on airports, especially ones operating at high air traffic intensities. The performance of the algorithm when considering limited predictability of bird movement and implementing kinetic energy thresholds is currently investigated.
5. Conclusions
This study demonstrates the potential of and identified preconditions for implementing operational bird strike prevention in form of a bird strike advisory system for air traffic control. As such it provides a foundation for further research on the operational feasibility of the concept. Future research should involve the limited predictability of bird movement. To develop respective bird movement models, site- and species-specific aspects should be considered. The involvement of additional sensor sources to support species identification should be evaluated. Furthermore, delays of aircraft, especially when operating at high air traffic demands, have to be limited to highly likely and damaging strikes. Third, options to include aircraft arriving at airports should be investigated, considering the required increase in look-ahead time to take into account higher aircraft speeds and the avoidance of go-arounds.
Author Contributions
Formal analysis, I.C.M.; Investigation, I.C.M.; Methodology, I.C.M., J.E., T.M., D.K. and J.M.H.; Software, S.K.; Supervision, J.E., T.M., D.K. and J.M.H.; Validation, I.C.M.; Writing—original draft, I.C.M.; Writing—review & editing, J.E., T.M., D.K., S.K. and J.M.H. All authors have read and agreed to the published version of the manuscript.
Funding
This work was financially supported by the DLR-DAAD Research Fellowship.
Acknowledgments
We thank Alexander Kuenz for introducing us to the concept of his collision avoidance algorithm. We thank him, Klaus Brinkmann as well as three anonymous reviewers for thoroughly reviewing this manuscript and for providing us with constructive feedback. We are grateful to Robin Radar, the Royal Netherlands Air Force and the Royal Netherlands Meteorological Institute for sharing their radar data with us.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| ACAS | Airborne Collision Avoidance System |
| ATFM | Air Traffic Flow Management |
| BADA | Base of Aircraft Data |
| BMP | Bird Movement Plan |
| CPA | Closest Point of Approach |
| SSR | Secondary Surveillance Radar |
References
- Thorpe, J. Conflict of Wings: Birds Versus Aircraft. In Problematic Wildlife. A Cross-Disciplinary Approach; Angelici, F.M., Ed.; Springer: Berlin/Heisenberg, Germany, 2016; Chapter 21; pp. 443–464. [Google Scholar]
- Dolbeer, R.A.; Begier, M.J.; Miller, P.R.; Weller, J.R.; Anderson, A.L. Wildlife Strikes to Civil Aircraft in the United States 1990–2018; Federal Aviation Administration National Wildlife Strike Database; Serial Report Number 25; Federal Aviation Administration, U.S. Department of Agriculture: Washington, DC, USA, 2019.
- McKee, J.; Shaw, P.; Dekker, A.; Patrick, K. Approaches to Wildlife Management in Aviation. In Problematic Wildlife. A Cross-Disciplinary Approach; Angelici, F.M., Ed.; Springer: Berlin/Heisenberg, Germany, 2016; Chapter 22; pp. 465–488. [Google Scholar]
- International Civil Aviation Organization. Annex 14 to the Convention of International Civil Aviation-Aerodromes, 8th ed.; International Civil Aviation Organization: Montréal, QC, Canada, 2004; Volume I. [Google Scholar]
- Dolbeer, R.A. Feathers in the Fan; AeroSafety World: Alexandria, VA, USA, 2008; Volume 3. [Google Scholar]
- Metz, I.C.; Mühlhausen, T.; Ellerbroek, J.; Kügler, D.; Hoekstra, J.M. What is the Potential of a Bird Strike Advisory System? In Proceedings of the 13th USA/Europe Air Traffic Management Research and Development Seminar, Vienna, Austria, 17–21 June 2019; Curran Associates, Inc.: Red Hook, NY, USA, 2019. [Google Scholar]
- Federal Aviation Administration. Introduction to TCAS II Version 7.1; Federal Aviaiton Administration FAA: Washington, DC, USA, 2011. [Google Scholar]
- van Gasteren, H.; Krijgsveld, K.L.; Klauke, N.; Leshem, Y.; Metz, I.C.; Skakuj, M.; Sorbi, S.; Schekler, I.; Shamoun-Baranes, J. Aeroecology meets aviation safety: Early warning systems in Europe and the Middle East prevent collisions between birds and aircraft. Ecography 2018, 42. [Google Scholar] [CrossRef]
- Kelly, T.; Allan, J. Ecological effects of aviation. In The Ecology of Transportation: Managing Mobility for the Environment; Springer: Berlin/Heisenberg, Germany, 2006; pp. 5–24. [Google Scholar]
- Kuenz, A. High Performance Conflict Detection and Resolution for Multi-Dimensional Objects. Ph.D. Thesis, German Aerospace Center DLR, Cologne, Germany, 2015. [Google Scholar]
- Kern, S. Analysis of runway capacity influencing factors to derive a runway capacity model for expansion planning. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; p. 4394. [Google Scholar]
- Kern, S. Analyse Kapazitätssteigernder Maßnahmen für Generische Start- und Landebahnsysteme. Ph.D. Thesis, Technische Universität Braunschweig, Braunschweig, Germany, 2019. [Google Scholar]
- Rinne, H. Definition and Properties of the Weibull Distribution; Chapman and Hall/CRC: Boca Raton, FL, USA, 2008. [Google Scholar]
- Metz, I.C.; Ellerbroek, J.; Mühlhausen, T.; Kügler, D.; Hoekstra, J.M. Simulating the Risk of Bird Strikes. In Proceedings of the 7th SESAR Innovation Days, Belgrade, Serbia, 28–30 November 2017. [Google Scholar]
- Metz, I.C.; Mühlhausen, T.; Ellerbroek, J.; Kügler, D.; van Gasteren, H.; Kraemer, J.; Hoekstra, J.M. Simulation Model to Calculate Bird-Aircraft Collisions and Near Misses in the Airport Vicinity. Aerospace 2018, 5, 112. [Google Scholar] [CrossRef] [Green Version]
- Office of the Director General of Civil Aviation, Government of India. Circular: Wildlife Hazard Management at Airports, 08/06/2020. No. AV.20011/01/2020-AL. Available online: https://prsindia.org/files/covid19/notifications/IND_DGCA_Wildlife%20hazard%20management%20at%20airports_June_09.pdf (accessed on 20 October 2020).
- Hoekstra, J.M.; Ellerbroek, J. BlueSky ATC Simulator Project: An Open Data and Open Source Approach. In Proceedings of the 7th International Conference on Research in Air Transportation, Philadelphia, PA, USA, 20–24 June 2016. [Google Scholar]
- Hoekstra, J.M. BlueSky—The Open Air Traffic Simulator. 2019. Available online: https://github.com/TUDelft-CNS-ATM/bluesky (accessed on 23 February 2019).
- Metz, I.C. First Release of BlueSky Including Bird Strike and Near-Miss Detection. 2018. Available online: https://github.com/isabelmetz/BlueSky-Bird-Strike-Detection/releases/tag/v1.0.0 (accessed on 23 February 2019).
- Graham, R.L.; Lubachevsky, B.D.; Nurmela, K.J.; Östergård, P.R. Dense packings of congruent circles in a circle. Discret. Math. 1998, 181, 139–154. [Google Scholar] [CrossRef] [Green Version]
- Australian Transport Safety Bureau. Australian Aviation Wildlife Strike Statistics 2008 to 2017; Australian Transport Safety Bureau: Canberra, Australia, 2019. [Google Scholar]
- European Organization for the Safety of Air Navigation. ATFCM User Manual; European Organization for the Safety of Air Navigation: Brussels, Belgium, 2018. [Google Scholar]
- Hale, M.R.; Stanley, R. Evaluating the Design and Suitability of the Wildlife Surveillance Concept. In Proceedings of the Integrated Communications Navigation and Surveillance Conference, Herndon, VA, USA, 18–20 April 2017. [Google Scholar] [CrossRef]
- International Civil Aviation Organization. Doc 9137—Airport Services Manual—Part 3—Wildlife Control and Reduction, 5th ed.; International Civil Aviation Organization: Montréal, Canada, 2012. [Google Scholar]
Figure 1.
Set-up of the collision avoidance algorithm.

Figure 2.
Protected volume of aircraft, individual birds and flocks (source: [14]).
Figure 2.
Protected volume of aircraft, individual birds and flocks (source: [14]).

Figure 3.
Validation procedure.

Figure 4.
Types of delays generated by the algorithm.

Figure 5.
Bird strike rates before and after the intervention of the algorithm.

Figure 6.
Number of the different delay types per traffic day (logarithmic scale).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Chosen distributions and parameters for the generation of air traffic flight plans.
| Traffic Intensity | Number of Flights | Separation Buffer | Reaction Time Buffer |
|---|---|---|---|
| high | 900 | Normal distribution: NM s, | Weibull distribution: , |
| medium | 500 | Weibull distribution : , | Weibull distribution: , |
a The Weibull distribution is a continuous probability function. Its shape strongly depends on the underlying
shape parameter k and the scale parameter λ [13].
Table 2.
Analyzed strike parameters for all scenarios, averaged per air traffic intensity as well as averages weighted by number of flights over all scenarios.
Table 2.
Analyzed strike parameters for all scenarios, averaged per air traffic intensity as well as averages weighted by number of flights over all scenarios.
| Traffic Intensity | Bird Movement Intensity | Prevented Strikes [%] | Missed Strikes [%] | False Alerts [%] |
|---|---|---|---|---|
| high | high | 99.15 | 0.85 | 0.07 |
| high | medium | 98.88 | 1.12 | 0.04 |
| high | low | 100.00 | 0.00 | 0.01 |
| high | average | 99.34 | 0.66 | 0.04 |
| medium | high | 99.74 | 0.26 | 0.06 |
| medium | medium | 99.24 | 0.76 | 0.02 |
| medium | low | 99.82 | 0.18 | 0.01 |
| medium | average | 99.27 | 0.40 | 0.03 |
| weighted average | 99.33 | 0.67 | 0.04 | |
Table 3.
Overview of delays resulting from the intervention of the collision avoidance algorithm per individual scenario, averaged per air traffic intensity as well as averages weighted by number of flights over all scenarios.
Table 3.
Overview of delays resulting from the intervention of the collision avoidance algorithm per individual scenario, averaged per air traffic intensity as well as averages weighted by number of flights over all scenarios.
| Traffic Intensity | Bird Movement Intensity | Delayed Flights [%] | Delays per Prevented Strike [-] | Average Delay per Affected Aircraft [s] | Maximum Observed Delay [s] |
|---|---|---|---|---|---|
| high | high | 15 | 14 | 192 | 2135 |
| high | medium | 3 | 7 | 70 | 704 |
| high | low | <1 | 6 | 59 | 350 |
| high | average | 6 | 9 | 107 | 2135 |
| medium | high | 3 | 2 | 35 | 486 |
| medium | medium | <1 | 2 | 29 | 320 |
| medium | low | <1 | 2 | 23 | 295 |
| medium | average | 1 | 2 | 29 | 486 |
| weighted average | 4 | 8 | 158 | 2135 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Metz, I.C.; Ellerbroek, J.; Mühlhausen, T.; Kügler, D.; Kern, S.; Hoekstra, J.M. The Efficacy of Operational Bird Strike Prevention. Aerospace 2021, 8, 17. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8010017
AMA Style
Metz IC, Ellerbroek J, Mühlhausen T, Kügler D, Kern S, Hoekstra JM. The Efficacy of Operational Bird Strike Prevention. Aerospace. 2021; 8(1):17. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8010017
Chicago/Turabian StyleMetz, Isabel C., Joost Ellerbroek, Thorsten Mühlhausen, Dirk Kügler, Stefan Kern, and Jacco M. Hoekstra. 2021. "The Efficacy of Operational Bird Strike Prevention" Aerospace 8, no. 1: 17. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace8010017
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.