
A Comprehensive Survey on Climate Optimal Aircraft Trajectory Planning

 , ,
, ,  , , ,
, , ,  , ,
, ,
Abstract
:1. Introduction
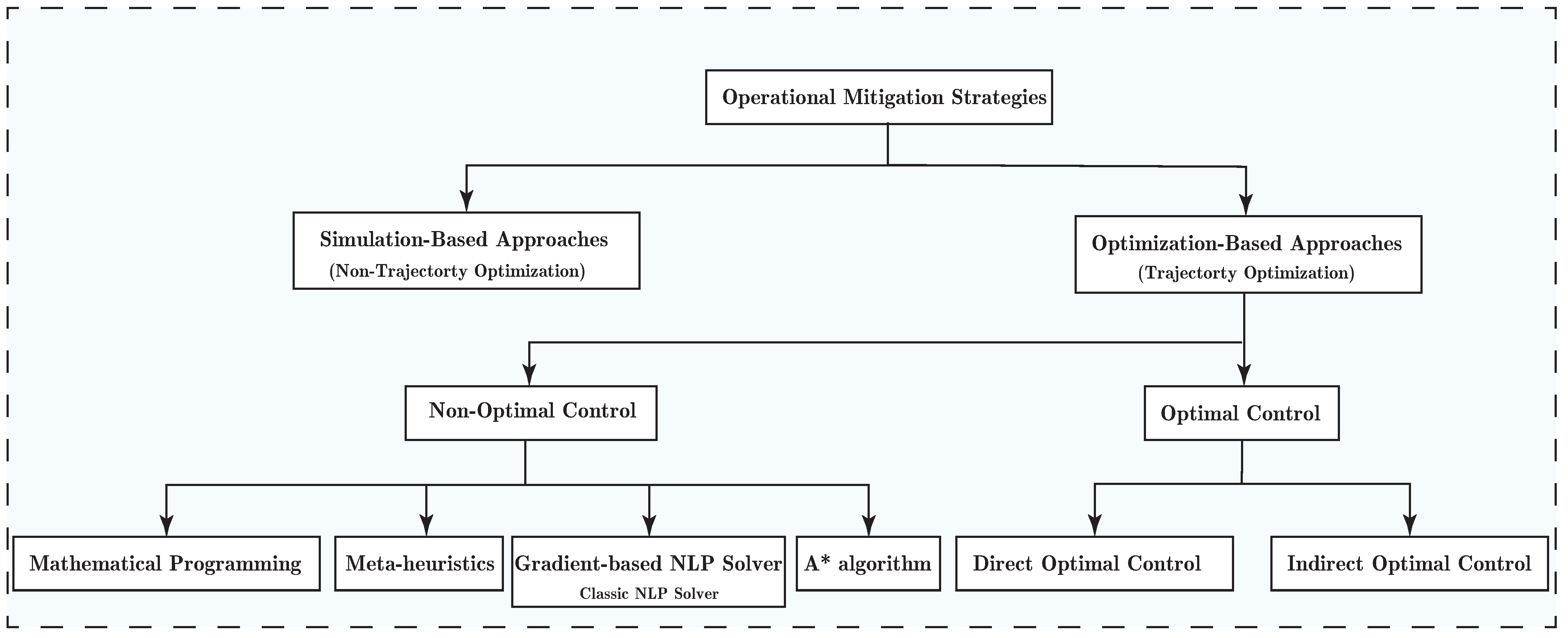
2. Operational Mitigation Strategies for non-CO2 Climate Impact
Operational Mitigation Strategies
- How to integrate climate effects in aircraft trajectory planning?
- Which methods to generate optimized trajectories considering an objective function expanded by climate effects?
3. Trajectory Optimization
3.1. Optimal Control Approach
3.1.1. Interpretation of Aircraft Trajectory Optimization as Optimal Control Problem
Dynamical Model of Aircraft
Path and Boundary Constraints
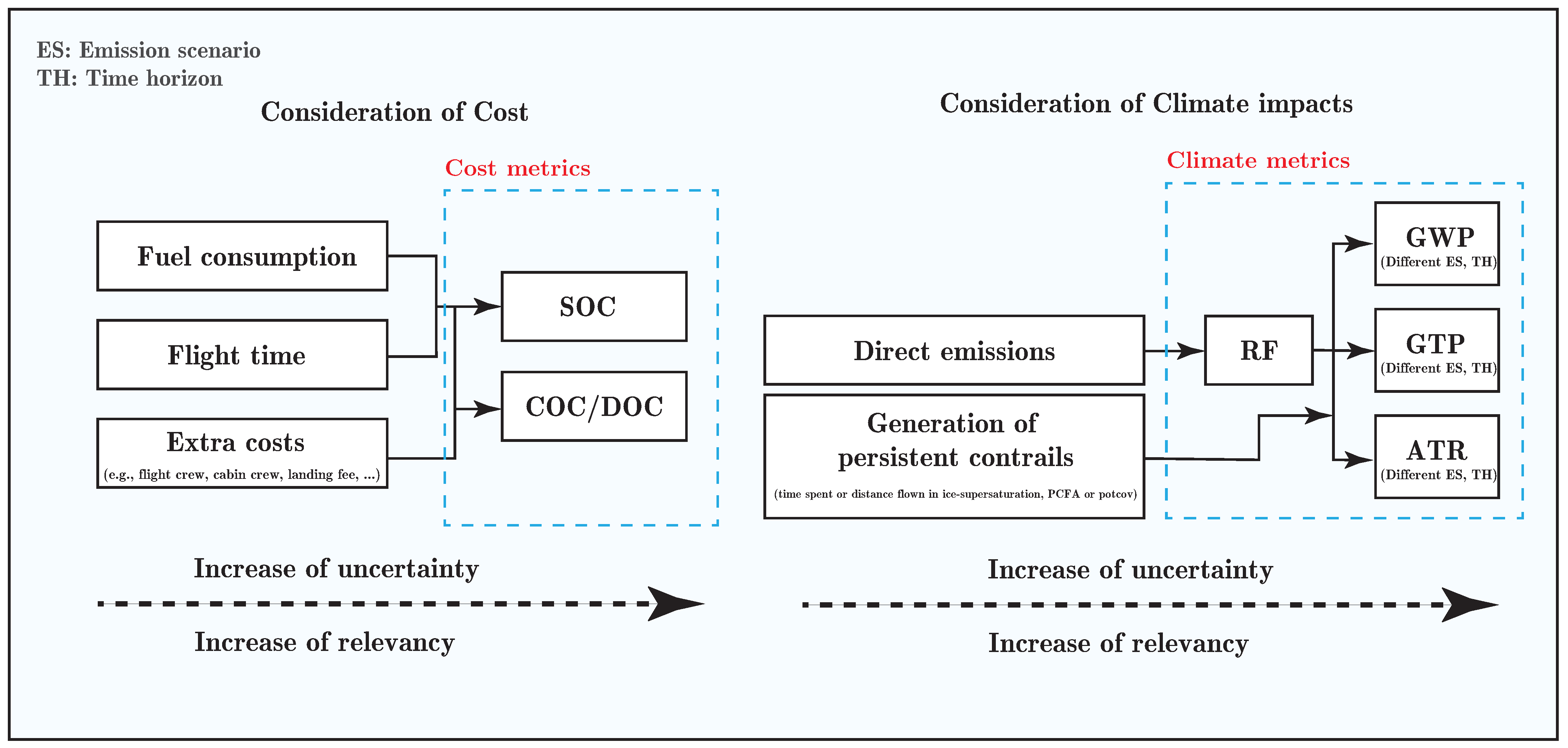
Objective Function
- Direct emission: Some studies in the literature considered the emissions such as and in aircraft path planning [36]. Direct emission does not provide suitable insight into the climate impacts since, for instance, the effects of 1 kg emission of on climate are highly different from that of [33]. Instead, these emissions are usually inputted to other climate metrics to estimate the climate impacts caused by them. To calculate different emissions, the corresponding emission indices are required. There exist various approaches to calculate emission indices. Boeing fuel flow method 2 (BFFM2) is an extensively employed approach in the literature to calculate emission indices for , CO, and HC [37,38].
- Generation of persistent contrails: A great majority of studies focused on avoiding areas that are sensitive to the formation of persistent contrails (e.g., [39,40]). In these so-called ice-supersaturated regions (ISSR), the formation of persistent contrail cirrus is possible [41]. In some cases, in addition to the ISSR, Schmidt–Appleman criterion (SAC), stating the formation of contrails at sufficiently low temperatures and sufficiently moist (relative to liquid water) environments is adopted [42,43,44]. In the literature, the consideration of both ISSR and SAC is called persistent contrail formation areas (PCFA) [13]. Within the numeric global climate model, such areas can also be identified by means of potential contrail cirrus coverage, a fraction of the grid box which contrails can maximally cover under the simulated atmospheric condition [29,45,46]. Such fractional representation is mainly due to the relatively large grid box size within climate models. Usually, time or distance flown in contrail-sensitive areas is defined as the objective to be minimized. In addition, the areas that are favorable for contrails are inputted to those metrics that quantify their corresponding climate impact, as the condition, determining the existence of the contrails.
- Radiative forcing: In some studies, RF has been used to quantify the climate impacts of aircraft emissions [47,48]. However, RF is not a direct measure of climate change. Instead, it measures the energy imbalance caused by changes in the Earth’s radiation balance between incoming solar radiation and thermal outgoing radiation. Such radiative impact has the potentiality to evolve the atmosphere temperature, estimated by RF [33].
- Global warming potential: One climate metric that allows comparing the climate impacts of all agents (i.e., greenhouse gases) is the global warming potential (GWP) [34,49]. GWP estimates how much energy (calculated using time-integrated RF) is absorbed for the emission of a trace gas compared to that of 1 kg carbon dioxide () over a given period. Thus, the larger the GWP, the more a given gas warms the earth in relation to over that period. Depending on the objective and application, some factors need to be considered to define suitable metrics. For instance, the emission scenario (e.g., pulse, sustained, or future emission scenario) and time horizon (e.g., 20 years or 100 years) are to be specified. The sustained emission scenario assumes constant emission of gas for the considered period, while pulse emission regards the emission of gas for one year and zero thereafter. The time period is specified with the selection of the time horizon. The studies [33,34,49] have discussed the selection of these factors based on different objectives. As an example, the pulse emission scenario for the time horizon of 20 years can be a suitable option for representing the short-term climate impacts. In contrast, 50 and 100 years time horizons can be used to capture medium-range and long-term climate impacts, respectively.
- Global temperature change potential: Unlike the GWP, estimating heat absorbed over a given period caused by a greenhouse gas emission, global temperature change potential (GTP) provides the temperature change at the end of the period [34]. This metric adapts a linear system for modeling the global temperature response to aviation emissions and contrails. In this metric, similar to the GWP, the changes are estimated compared to . For the GTP, the emission scenario and the time horizon need to be specified.
- Average temperature response: Another metric that measures the climate impact in terms of temperature change is average temperature response (ATR) [33,49]. ATR is a derivative metric of GTP which combines the integrated temperature change for different emission scenarios and time horizons. Some functions (called climate change functions) have been developed within the EU-projects REACT4C, ATM4E, and FlyATM4E to quantify the climate impacts of each agent in terms of ATR. In Section 4, the employment of such functions for climate optimal trajectory planning will be reviewed.
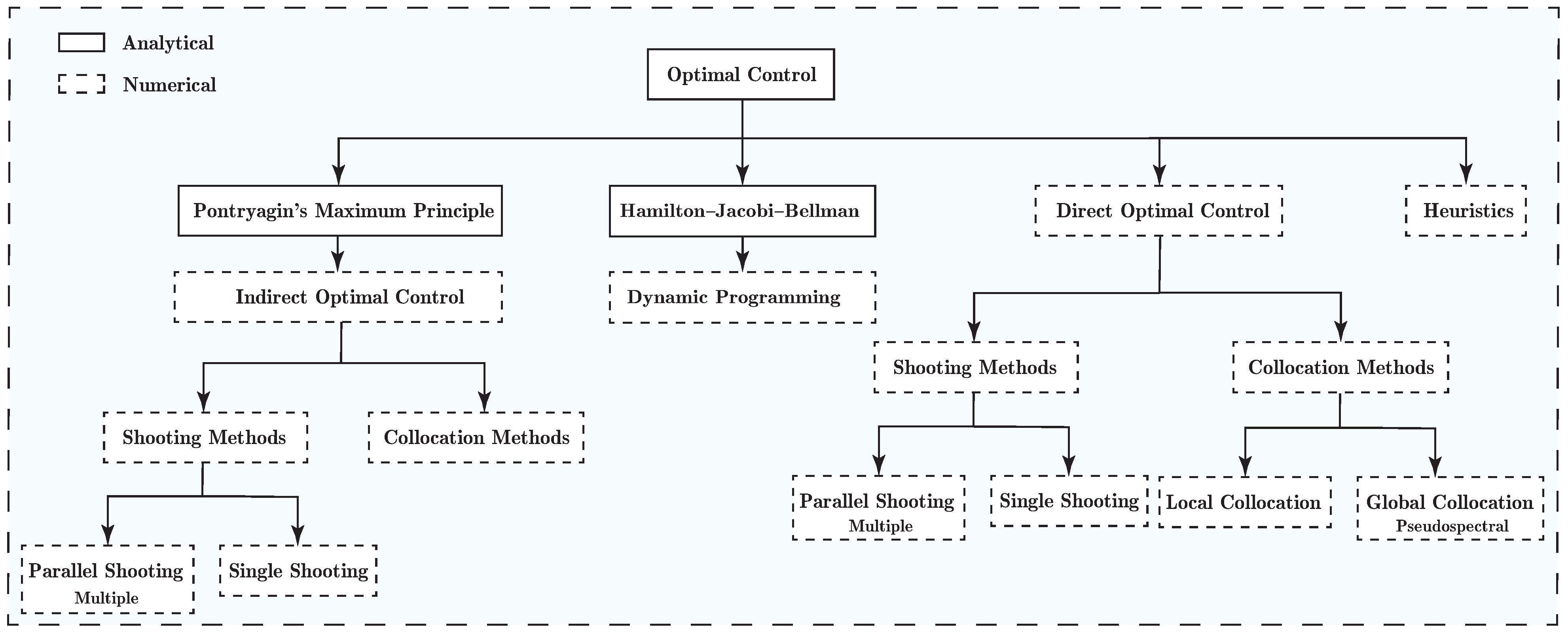
3.1.2. Solution Approaches
3.2. Non-Optimal Control Approach
4. Review of Climate Optimal Trajectory Planning Studies
4.1. Simulation-Based Strategies
4.2. Non-Optimal Control Methods
4.2.1. Mathematical Programming
4.2.2. Meta-Heuristics
4.2.3. Path Planning
4.3. Optimal Control Methods
4.3.1. Indirect Optimal Control
4.3.2. Direct Optimal Control
4.4. Remarks
- The mitigation potential of non- climate impacts using operational strategies is promising.
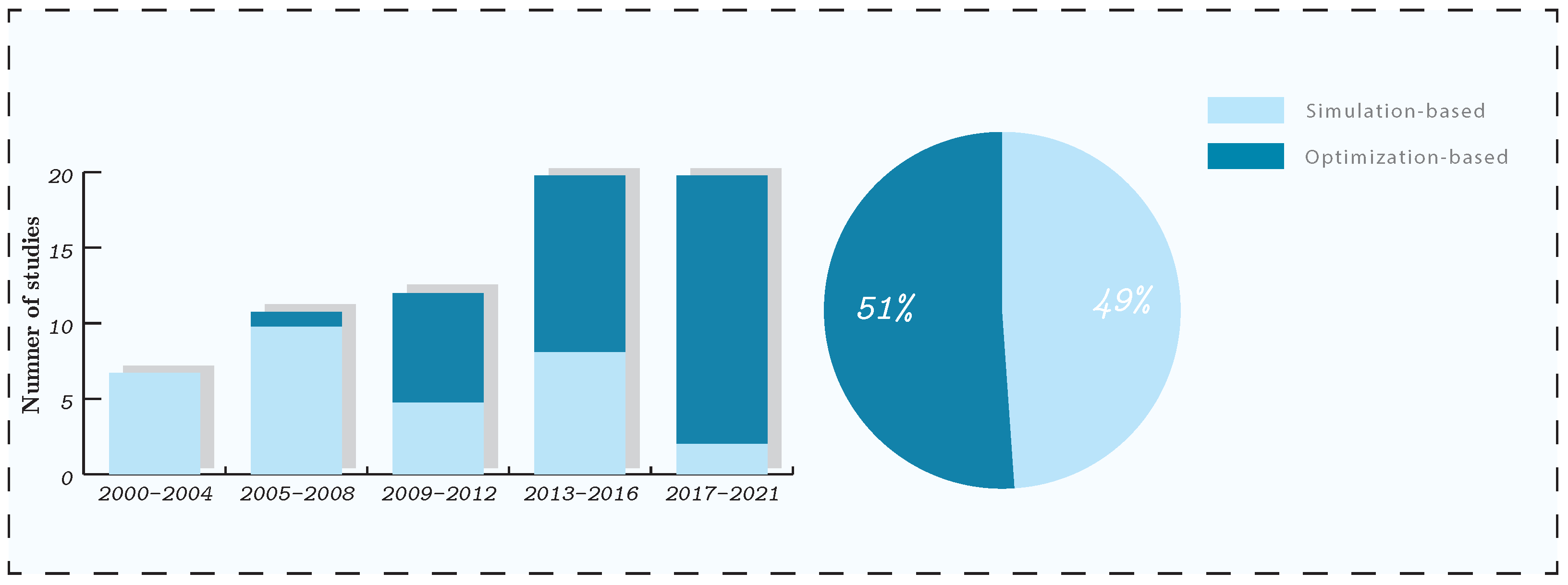
- The use of trajectory optimization techniques is increasing due to the capability to produce more efficient trajectories (in the sense of mitigation potential).
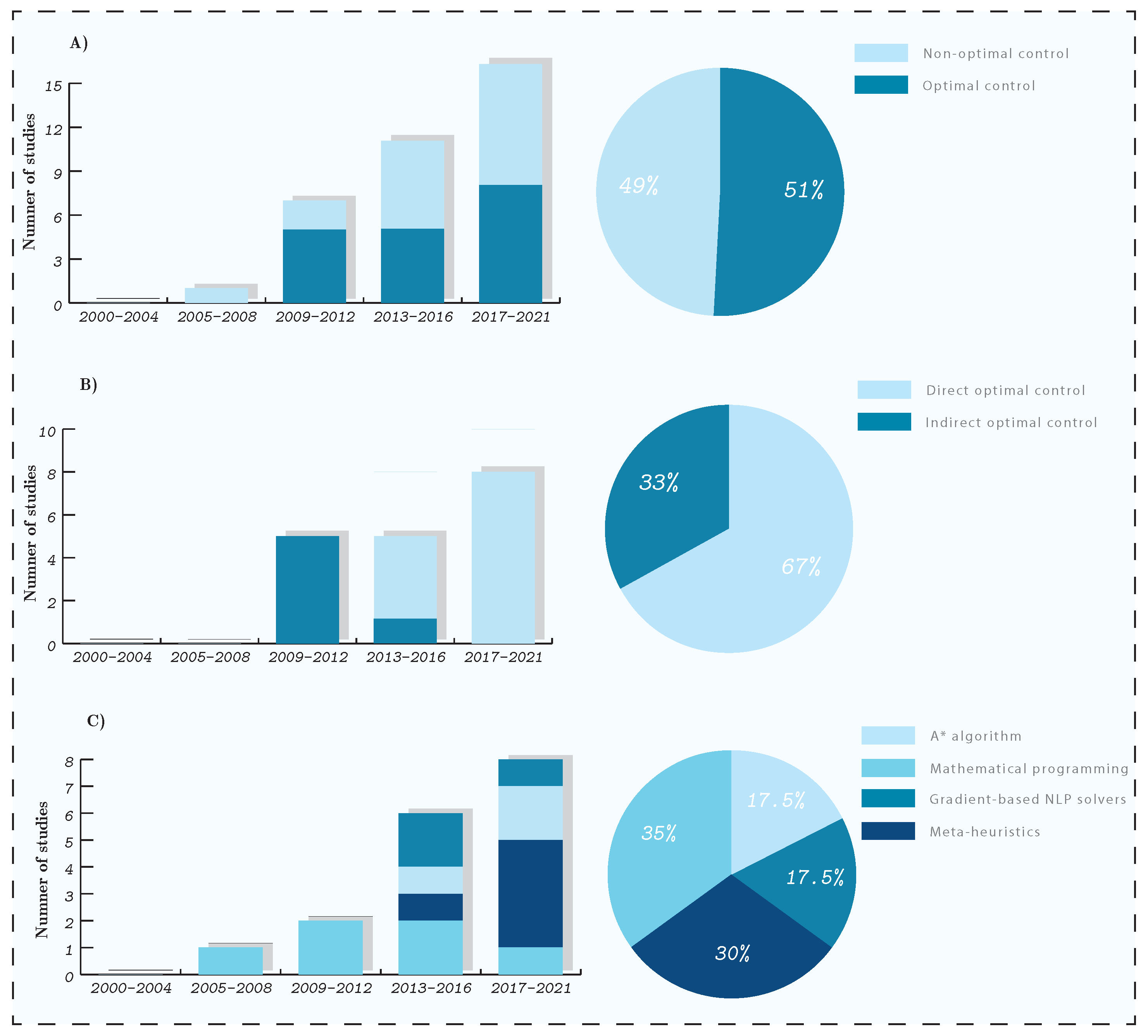
- Although the optimal control is known as one of the most reliable approaches to solve trajectory optimization problems (at least considering the free-route concept), due to some drawbacks with the implementation, they share almost the same portion with non-optimal control methods to the total trajectory optimization-based techniques.
- The focus has always been on conventional jet-powered aircraft.
- The mitigation strategies using ATO techniques reviewed in this paper were mostly performed on single flights.
- The aircraft performance, meteorological variables, and climate and cost indices were all considered deterministic in the reviewed studies.
5. Discussion and Challenges
5.1. Objective Function: Physical Understanding and Predictability of Aviation Climate Impacts
5.2. Aircraft Dynamics and Constraints: New Models for H2 and Hybrid Vehicles
5.3. Solution Approach: Development of Efficient Deterministic/Stochastic Dynamical Optimization Solvers
5.4. Network-Scale Climate Optimal Trajectories
6. Conclusions
- Physical understanding and predictability of aviation climate impacts, particularly understanding and quantifying the uncertainties associated with climate science and meteorological forecast.
- Better understanding of H2- and hybrid-powered aircraft emissions, the associated climate impacts, and the modeling of the equations of motion.
- Developing high-performance dynamical optimization solvers to generate robust eco-efficient trajectories with acceptable accuracy in a computationally fast manner.
- Identifying climatic hotspots and incorporating them into network-wide models and solution approaches for problems related to, e.g., demand and capacity balancing, network complexity, and resiliency.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ATO | Aircraft trajectory optimization |
| ATM | Air traffic management |
| OC | Optimal control |
| TO | Trajectory optimization |
| NTO | Non-trajectory optimization |
| CSR | Climate sensitive region |
| PCFA | Persistent contrail formation areas |
| ISSR | Ice-supersaturated |
| SAC | Schmidt–Appleman criteria |
| CCF | Climate change function |
| aCCF | Algorithmic climate change function |
| eCCF | Emission-based climate change function |
| GWP | Global warming potential |
| GTP | Global temperature change potential |
| AGTP | Absolute global temperature potential |
| ATR | Average temperature response |
| RF | Radiative forcing |
| PMP | Pontryagin’s minimum principle |
| HJB | Hamilton–Jacobi–Bellman |
| SOC | Simple operating cost |
| COC | Cash operating cost |
| DOC | Direct operating cost |
| NLP | Nonlinear programming |
| 2PBVP | Two-point boundary value problems |
| DAE | Differential algebraic equations |
| FACET | Future air traffic management concepts evaluation tool |
| BFFM2 | Boeing fuel flow method 2 |
| SQP | Successive quadratic programming |
| AEDT | Aviation environmental design tool |
| FAA | Federal aviation administration |
| MIP | Mixed-integer programming |
| MILP | Mixed-integer linear programming |
| MIQP | Mixed-integer quadratic programming |
| BIP | Binary integer programming |
| TOMATO | Toolchain for multicriteria aircraft trajectory optimization |
| MOTO | Multi-objective trajectory optimization |
| GA | Genetic algorithm |
| EMAC | ECHAM/MESSy atmospheric chemistry |
| TOM | Trajectory optimization module |
| IPT | Interior-point |
| RAMS | Air traffic control mathematical simulator |
Appendix A. Optimal Control Methodologies
Appendix A.1. Pontryagin’s Minimum Principle (PMP)
- Euler–Lagrange equations:
- Transversality conditions:where is called Lagrange multipliers.
Numerical Approach (Indirect Optimal Control)
Appendix A.2. Hamilton-Jacobi-Bellman (HJB)
Numerical Approach (Dynamic Programming)
Appendix A.3. Direct Optimal Control
References
- Lee, D.S.; Fahey, D.; Skowron, A.; Allen, M.; Burkhardt, U.; Chen, Q.; Doherty, S.; Freeman, S.; Forster, P.; Fuglestvedt, J.; et al. The contribution of global aviation to anthropogenic climate forcing for 2000 to 2018. Atmos. Environ. 2021, 244, 117834. [Google Scholar] [CrossRef]
- Forecast, Global Market. Future Journeys 2013; Technical Report; Airbus: Leiden, The Netherlands, 2013. [Google Scholar]
- Lee, D.S.; Fahey, D.W.; Forster, P.M.; Newton, P.J.; Wit, R.C.; Lim, L.L.; Owen, B.; Sausen, R. Aviation and global climate change in the 21st century. Atmos. Environ. 2009, 43, 3520–3537. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.S.; Pitari, G.; Grewe, V.; Gierens, K.; Penner, J.E.; Petzold, A.; Prather, M.; Schumann, U.; Bais, A.; Berntsen, T.; et al. Transport impacts on atmosphere and climate: Aviation. Atmos. Environ. 2010, 44, 4678–4734. [Google Scholar] [CrossRef] [Green Version]
- Bolić, T.; Ravenhill, P. SESAR: The Past, Present, and Future of European Air Traffic Management Research. Engineering 2021, 7, 448–451. [Google Scholar] [CrossRef]
- Gnadt, A.R.; Speth, R.L.; Sabnis, J.S.; Barrett, S.R. Technical and environmental assessment of all-electric 180-passenger commercial aircraft. Prog. Aerosp. Sci. 2019, 105, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, J.; Afonso, F.; Ribeiro, I.; Ferreira, B.; Policarpo, H.; Peças, P.; Lau, F. Environmental assessment of hybrid-electric propulsion in conceptual aircraft design. J. Clean. Prod. 2020, 247, 119477. [Google Scholar] [CrossRef]
- Staples, M.D.; Malina, R.; Suresh, P.; Hileman, J.I.; Barrett, S.R. Aviation CO2 emissions reductions from the use of alternative jet fuels. Energy Policy 2018, 114, 342–354. [Google Scholar] [CrossRef]
- Stratton, R.W.; Wolfe, P.J.; Hileman, J.I. Impact of aviation non-CO2 combustion effects on the environmental feasibility of alternative jet fuels. Environ. Sci. Technol. 2011, 45, 10736–10743. [Google Scholar] [CrossRef]
- Delahaye, D.; Puechmorel, S.; Tsiotras, P.; Féron, E. Mathematical models for aircraft trajectory design: A survey. In Air Traffic Management and Systems; Springer: Berlin/Heidelberg, Germany, 2014; pp. 205–247. [Google Scholar]
- Gardi, A.; Sabatini, R.; Ramasamy, S. Multi-objective optimisation of aircraft flight trajectories in the ATM and avionics context. Prog. Aerosp. Sci. 2016, 83, 1–36. [Google Scholar] [CrossRef]
- Mannstein, H.; Spichtinger, P.; Gierens, K. A note on how to avoid contrail cirrus. Transp. Res. Part D Transp. Environ. 2005, 10, 421–426. [Google Scholar] [CrossRef]
- Zou, B.; Buxi, G.S.; Hansen, M. Optimal 4-D aircraft trajectories in a contrail-sensitive environment. Netw. Spat. Econ. 2016, 16, 415–446. [Google Scholar] [CrossRef]
- Hammad, A.W.; Rey, D.; Bu-Qammaz, A.; Grzybowska, H.; Akbarnezhad, A. Mathematical optimization in enhancing the sustainability of aircraft trajectory: A review. Int. J. Sustain. Transp. 2020, 14, 413–436. [Google Scholar] [CrossRef]
- Matthes, S.; Schumann, U.; Grewe, V.; Frömming, C.; Dahlmann, K.; Koch, A.; Mannstein, H. Climate optimized air transport. In Atmospheric Physics; Springer: Berlin/Heidelberg, Germany, 2012; pp. 727–746. [Google Scholar]
- Niklaß, M.; Lührs, B.; Grewe, V.; Dahlmann, K.; Luchkova, T.; Linke, F.; Gollnick, V. Potential to reduce the climate impact of aviation by climate restricted airspaces. Transp. Policy 2019, 83, 102–110. [Google Scholar] [CrossRef]
- Williams, V.; Noland, R.B.; Toumi, R. Air transport cruise altitude restrictions to minimize contrail formation. Clim. Policy 2003, 3, 207–219. [Google Scholar] [CrossRef]
- Williams, V.; Noland, R.B. Variability of contrail formation conditions and the implications for policies to reduce the climate impacts of aviation. Transp. Res. Part D Transp. Environ. 2005, 10, 269–280. [Google Scholar] [CrossRef]
- Campbell, S.; Neogi, N.; Bragg, M. An operational strategy for persistent contrail mitigation. In Proceedings of the 9th AIAA Aviation Technology, Integration, and Operations Conference (ATIO) and Aircraft Noise and Emissions Reduction Symposium (ANERS), Hilton Head, SC, USA, 21–23 September 2009; p. 6983. [Google Scholar]
- Sridhar, B.; Ng, H.K.; Chen, N.Y. Aircraft trajectory optimization and contrails avoidance in the presence of winds. J. Guid. Control Dyn. 2011, 34, 1577–1584. [Google Scholar] [CrossRef]
- Gierens, K.M.; Lim, L.; Eleftheratos, K. A review of various strategies for contrail avoidance. Open Atmos. Sci. J. 2008, 2, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Chai, R.; Savvaris, A.; Tsourdos, A.; Chai, S.; Xia, Y. A review of optimization techniques in spacecraft flight trajectory design. Prog. Aerosp. Sci. 2019, 109, 100543. [Google Scholar] [CrossRef]
- Morante, D.; Sanjurjo Rivo, M.; Soler, M. A Survey on Low-Thrust Trajectory Optimization Approaches. Aerospace 2021, 8, 88. [Google Scholar] [CrossRef]
- Kirk, D.E. Optimal Control Theory: An Introduction; Courier Corporation: Chelmsford, MA, USA, 2004. [Google Scholar]
- Zhou, K.; Doyle, J.; Glover, K. Robust and Optimal Control; Prentice Hall: Hoboken, NJ, USA, 1996. [Google Scholar]
- Lewis, F.L.; Vrabie, D.; Syrmos, V.L. Optimal Control; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Chachuat, B. Nonlinear and Dynamic Optimization: From Theory to Practice; Technical Report; Laboratoire d’Automatique, École Polytechnique Fédérale de Lausanne: Lausanne, Switzerland, 2007. [Google Scholar]
- Betts, J.T. Practical Methods for Optimal Control and Estimation Using Nonlinear Programming, 2nd ed.; Advances in Design and Control; SIAM: Philadelphia, PA, USA, 2010. [Google Scholar]
- Yamashita, H.; Yin, F.; Grewe, V.; Jöckel, P.; Matthes, S.; Kern, B.; Dahlmann, K.; Frömming, C. Newly developed aircraft routing options for air traffic simulation in the chemistry–climate model EMAC 2.53: AirTraf 2.0. Geosci. Model Dev. 2020, 13, 4869–4890. [Google Scholar] [CrossRef]
- Förster, S.; Rosenow, J.; Lindner, M.; Fricke, H. A toolchain for optimizing trajectories under real weather conditions and realistic flight performance. In Proceedings of the Greener Aviation Conference, Brussels, Belgium, 13–17 October 2016. [Google Scholar]
- Yamashita, H.; Yin, F.; Grewe, V.; Jöckel, P.; Matthes, S.; Kern, B.; Dahlmann, K.; Frömming, C. Analysis of aircraft routing strategies for north atlantic flights by using AirTraf 2.0. Aerospace 2021, 8, 33. [Google Scholar] [CrossRef]
- Rosenow, J.; Förster, S.; Lindner, M.; Fricke, H. Multicriteria-Optimized Trajectories Impacting Today’s Air Traffic Density, Efficiency, and Environmental Compatibility. J. Air Transp. 2019, 27, 8–15. [Google Scholar] [CrossRef]
- Dallara, E.S.; Kroo, I.M.; Waitz, I.A. Metric for comparing lifetime average climate impact of aircraft. AIAA J. 2011, 49, 1600–1613. [Google Scholar] [CrossRef]
- Fuglestvedt, J.S.; Shine, K.P.; Berntsen, T.; Cook, J.; Lee, D.; Stenke, A.; Skeie, R.B.; Velders, G.; Waitz, I. Transport impacts on atmosphere and climate: Metrics. Atmos. Environ. 2010, 44, 4648–4677. [Google Scholar] [CrossRef] [Green Version]
- Shine, K.P.; Fuglestvedt, J.S.; Hailemariam, K.; Stuber, N. Alternatives to the global warming potential for comparing climate impacts of emissions of greenhouse gases. Clim. Chang. 2005, 68, 281–302. [Google Scholar] [CrossRef] [Green Version]
- Celis, C.; Sethi, V.; Zammit-Mangion, D.; Singh, R.; Pilidis, P. Theoretical optimal trajectories for reducing the environmental impact of commercial aircraft operations. J. Aerosp. Technol. Manag. 2014, 6, 29–42. [Google Scholar] [CrossRef]
- Jelinek, F. The Advanced Emission Model (AEM3)-Validation Report. Ratio 2004, 306, 1–13. [Google Scholar]
- DuBois, D.; Paynter, G.C. “Fuel Flow Method2” for Estimating Aircraft Emissions. SAE Trans. 2006, 115, 1–14. [Google Scholar]
- Soler, M.; Zou, B.; Hansen, M. Flight trajectory design in the presence of contrails: Application of a multiphase mixed-integer optimal control approach. Transp. Res. Part C Emerg. Technol. 2014, 48, 172–194. [Google Scholar] [CrossRef]
- Sridhar, B.; Chen, N.Y.; Ng, H.K.; Linke, F. Design of aircraft trajectories based on trade-offs between emission. In Proceedings of the 9th USA/Europe Air Traffic Management Research and Development Seminar (ATM2011), Berlin, Germany, 14–17 June 2011. [Google Scholar]
- Reutter, P.; Neis, P.; Rohs, S.; Sauvage, B. Ice supersaturated regions: Properties and validation of ERA-Interim reanalysis with IAGOS in situ water vapour measurements. Atmos. Chem. Phys. 2020, 20, 787–804. [Google Scholar] [CrossRef] [Green Version]
- Schumann, U. On conditions for contrail formation from aircraft exhausts. Meteorol. Z. 1996, 5, 4–23. [Google Scholar] [CrossRef]
- Schmidt, E. Die Entstehung von Eisnebel aus den Auspuffgasen von Flugmotoren; Verlag R. Oldenbourg: München, Germany, 1941. [Google Scholar]
- Appleman, H. The formation of exhaust condensation trails by jet aircraft. Bull. Am. Meteorol. Soc. 1953, 34, 14–20. [Google Scholar] [CrossRef] [Green Version]
- Burkhardt, U.; Kärcher, B.; Ponater, M.; Gierens, K.; Gettelman, A. Contrail cirrus supporting areas in model and observations. Geophys. Res. Lett. 2008, 35, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Yin, F.; Grewe, V.; Frömming, C.; Yamashita, H. Impact on flight trajectory characteristics when avoiding the formation of persistent contrails for transatlantic flights. Transp. Res. Part D Transp. Environ. 2018, 65, 466–484. [Google Scholar] [CrossRef]
- Lim, Y.; Gardi, A.; Marino, M.; Sabatini, R. Modelling and evaluation of persistent contrail formation regions for offline and online strategic flight trajectory planning. In Sustainable Aviation; Springer: Berlin/Heidelberg, Germany, 2016; pp. 243–277. [Google Scholar]
- Lim, Y.; Gardi, A.; Sabatini, R. Optimal aircraft trajectories to minimize the radiative impact of contrails and CO2. Energy Procedia 2017, 110, 446–452. [Google Scholar] [CrossRef]
- Grewe, V.; Frömming, C.; Matthes, S.; Brinkop, S.; Ponater, M.; Dietmüller, S.; Jöckel, P.; Garny, H.; Tsati, E.; Dahlmann, K.; et al. Aircraft routing with minimal climate impact: The REACT4C climate cost function modelling approach (V1. 0). Geosci. Model Dev. 2014, 7, 175–201. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.; Arrowsmith, S.; Skowron, A.; Owen, B.; Sausen, R.; Boucher, O.; Faber, J.; Marianne, L.; Fuglestvedt, J.; van Wijngaarden, L. Updated Analysis of the Non-CO2 Climate Impacts of Aviation and Potential Policy Measures Pursuant to EU Emissions Trading System Directive Article 30(4). 2020. Available online: https://www.easa.europa.eu/document-library/research-reports/report-commission-european-parliament-and-council (accessed on 8 February 2022).
- Ng, H.K.; Sridhar, B.; Grabbe, S.; Chen, N. Cross-polar aircraft trajectory optimization and the potential climate impact. In Proceedings of the 2011 IEEE/AIAA 30th Digital Avionics Systems Conference, Seattle, WA, USA, 21 July 2011. [Google Scholar]
- González Arribas, D. Robust Aircraft Trajectory Optimization under Meteorological Uncertainty. Ph.D. Dissertation, Universidad Carlos III de Madrid, Madrid, Spain, July 2019. [Google Scholar]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A fast elitist non-dominated sorting genetic algorithm for multi-objective optimization: NSGA-II. In Proceedings of the International Conference on Parallel Problem Solving from Nature, Paris, France, 18–20 September 2000; Springer: Berlin/Heidelberg, Germany, 2000; pp. 849–858. [Google Scholar]
- Mladenović, N.; Hansen, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, IEEE, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Myhre, G.; Stordal, F. On the tradeoff of the solar and thermal infrared radiative impact of contrails. Geophys. Res. Lett. 2001, 28, 3119–3122. [Google Scholar] [CrossRef]
- Williams, V.; Noland, R.B.; Toumi, R. Reducing the climate change impacts of aviation by restricting cruise altitudes. Transp. Res. Part D Transp. Environ. 2002, 7, 451–464. [Google Scholar] [CrossRef]
- Sausen, R.; Gierens, K.; Ponater, M.; Schumann, U. A diagnostic study of the global distribution of contrails part I: Present day climate ast. Theor. Appl. Climatol. 1998, 61, 127–141. [Google Scholar] [CrossRef] [Green Version]
- Fichter, C.; Marquart, S.; Sausen, R.; Lee, D.S. The impact of cruise altitude on contrails and related radiative forcing. Meteorol. Z. 2005, 14, 563–572. [Google Scholar] [CrossRef] [Green Version]
- Klima, K. Assessment of a Global Contrail Modeling Method and Operational Strategies for Contrail Mitigation. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]
- Chen, N.Y.; Sridhar, B.; Ng, H.K. Tradeoff between contrail reduction and emissions in United States national airspace. J. Aircr. 2012, 49, 1367–1375. [Google Scholar] [CrossRef]
- Chen, N.Y.; Sridhar, B.; Ng, H.; Li, J. Evaluating tradeoff between environmental impact and operational costs for enroute air traffic. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, National Harbor, MD, USA, 13–17 January 2014; p. 1464. [Google Scholar]
- Grewe, V.; Champougny, T.; Matthes, S.; Frömming, C.; Brinkop, S.; Søvde, O.A.; Irvine, E.A.; Halscheidt, L. Reduction of the air traffic’s contribution to climate change: A REACT4C case study. Atmos. Environ. 2014, 94, 616–625. [Google Scholar] [CrossRef] [Green Version]
- Jöckel, P.; Kerkweg, A.; Pozzer, A.; Sander, R.; Tost, H.; Riede, H.; Baumgaertner, A.; Gromov, S.; Kern, B. Development cycle 2 of the modular earth submodel system (MESSy2). Geosci. Model Dev. 2010, 3, 717–752. [Google Scholar] [CrossRef] [Green Version]
- Brenninkmeijer, C.A.; Cai, D.S. Earth System Chemistry integrated Modelling (ESCiMo) with the Modular Earth Submodel System (MESSy) version 2.51. Geosci. Model Dev. 2016, 9, 1153. [Google Scholar]
- Frömming, C.; Grewe, V.; Jöckel, P.; Brinkop, S.; Dietmüller, S.; Garny, H.; Ponater, M.; Tsati, E.; Matthes, S. Climate cost functions as a basis for climate optimized flight trajectories. Air Traffic Semin. 2013, 239, 1–9. [Google Scholar]
- Irvine, E.A.; Hoskins, B.J.; Shine, K.P.; Lunnon, R.W.; Froemming, C. Characterizing North Atlantic weather patterns for climate-optimal aircraft routing. Meteorol. Appl. 2013, 20, 80–93. [Google Scholar] [CrossRef] [Green Version]
- Grewe, V.; Matthes, S.; Frömming, C.; Brinkop, S.; Jöckel, P.; Gierens, K.; Champougny, T.; Fuglestvedt, J.; Haslerud, A.; Irvine, E.; et al. Feasibility of climate-optimized air traffic routing for trans-Atlantic flights. Environ. Res. Lett. 2017, 12, 034003. [Google Scholar] [CrossRef]
- Campbell, S.; Neogi, N.; Bragg, M. An optimal strategy for persistent contrail avoidance. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Monterey, CA, USA, 19 August 2008; p. 6515. [Google Scholar]
- Wei, P.; Sridhar, B.; Chen, N.; Sun, D. A Linear Programming Approach to the Development of Contrail Reduction Strategies Satisfying Operationally Feasible Constraints. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Garden Grove, CA, USA, 13–16 August 2012; p. 4754. [Google Scholar]
- Campbell, S.E.; Bragg, M.B.; Neogi, N.A. Fuel-optimal trajectory generation for persistent contrail mitigation. J. Guid. Control Dyn. 2013, 36, 1741–1750. [Google Scholar] [CrossRef]
- Lim, Y.; Gardi, A.; Sabatini, R. Modelling and evaluation of aircraft contrails for 4-dimensional trajectory optimisation. SAE Int. J. Aerosp. 2015, 8, 248–259. [Google Scholar] [CrossRef]
- Rosenow, J.; Förster, S.; Lindner, M.; Fricke, H. Impact of multi-critica optimized trajectories on European air traffic density, efficiency and the environment. In Proceedings of the Twelfth USA/Europe Air Traffic Management Research and Development Seminar, Seattle, WA, USA, 27–30 June 2017; pp. 26–30. [Google Scholar]
- Yin, F.; Grewe, V.; van Manen, J.; Matthes, S.; Yamashita, H.; Linke, F.; Lührs, B. Verification of the ozone algorithmic climate change functions for predicting the short-term NOx effects from aviation en-route. In Proceedings of the International Conference on Research in Air Transportation (ICRAT), Barcelona, Spain, 26–29 June 2018. [Google Scholar]
- Yamashita, H.; Grewe, V.; Jöckel, P.; Linke, F.; Schaefer, M.; Sasaki, D. Air traffic simulation in chemistry-climate model EMAC 2.41: AirTraf 1.0. Geosci. Model Dev. 2016, 9, 3363–3392. [Google Scholar] [CrossRef] [Green Version]
- Yamashita, H.; Grewe, V.; Jöckel, P.; Linke, F.; Schaefer, M.; Sasaki, D. Towards climate optimized flight trajectories in a climate model: AirTraf. In Proceedings of the Eleventh USA/Europe Air Traffic Management Research and Development Seminar (ATM2015), Lisbon, Portugal, 23–26 June 2015; pp. 23–26. [Google Scholar]
- Sasaki, D.; Obayashi, S.; Nakahashi, K. Navier-Stokes optimization of supersonic wings with four objectives using evolutionary algorithm. J. Aircr. 2002, 39, 621–629. [Google Scholar] [CrossRef]
- Sasaki, D.; Obayashi, S. Efficient search for trade-offs by adaptive range multi-objective genetic algorithms. J. Aerosp. Comput. Inform. Commun. 2005, 2, 44–64. [Google Scholar] [CrossRef] [Green Version]
- Sasaki, D.; Obayashi, S. Development of Efficient Multi-Objective Evolutionary Algorithms: ARMOGAs (Adaptive Range Multi-Objective Genetic Algorithms); Institute of Fluid Science, Tohoku University: Sendai, Japan, 2004; Volume 16, pp. 11–18. [Google Scholar]
- Van Manen, J.; Grewe, V. Algorithmic climate change functions for the use in eco-efficient flight planning. Transp. Res. Part D Transp. Environ. 2019, 67, 388–405. [Google Scholar] [CrossRef]
- Rosenow, J.; Fricke, H. Flight Performance Modeling to Optimize Trajectories; Deutsche Gesellschaft für Luft-und Raumfahrt-Lilienthal-Oberth eV: Bonn, Germany, 2016. [Google Scholar]
- Sridhar, B.; Chen, N.; Ng, H.K. Simulation and Optimization Methods for Assessing the Impact of Aviation Operations on the Environment. In Proceedings of the 27th International Congress of the Aeronautical Sciences (ICAS2010), Nice, France, 19–24 September 2010; pp. 1–11. [Google Scholar]
- Lührs, B.; Linke, F.; Gollnick, V. Erweiterung eines Trajektorienrechners zur Nutzung meteorologischer Daten für die Optimierung von Flugzeugtrajektorien. In Proceedings of the Deutscher Luft- und Raumfahrtkongress (DLRK), Augsburg, Germany, 16–18 September 2014. [Google Scholar]
- Hartjes, S.; Hendriks, T.; Visser, D. Contrail mitigation through 3D aircraft trajectory optimization. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 3908. [Google Scholar]
- Lührs, B.; Niklass, M.; Froemming, C.; Grewe, V.; Gollnick, V. Cost-benefit assessment of 2D and 3D climate and weather optimized trajectories. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 3758. [Google Scholar]
- Niklaß, M.; Lührs, B.; Ghosh, R. A note on how to internalize aviation’s climate impact of non-CO2 effects. In Proceedings of the 2nd ECATS Conference, Athens, Greece, 7–9 November 2016; pp. 7–9. [Google Scholar]
- Matthes, S.; Grewe, V.; Dahlmann, K.; Frömming, C.; Irvine, E.; Lim, L.; Linke, F.; Lührs, B.; Owen, B.; Shine, K.; et al. A concept for multi-criteria environmental assessment of aircraft trajectories. Aerospace 2017, 4, 42. [Google Scholar] [CrossRef] [Green Version]
- Lührs, B.; Linke, F.; Matthes, S.; Grewe, V.; Yin, F. Climate impact mitigation potential of European air traffic in a weather situation with strong contrail formation. Aerospace 2021, 8, 50. [Google Scholar] [CrossRef]
- Matthes, S.; Lührs, B.; Dahlmann, K.; Grewe, V.; Linke, F.; Yin, F.; Klingaman, E.; Shine, K.P. Climate-optimized trajectories and robust mitigation potential: Flying ATM4E. Aerospace 2020, 7, 156. [Google Scholar] [CrossRef]
- Niklaß, M.; Grewe, V.; Gollnick, V.; Dahlmann, K. Concept of climate-charged airspaces: A potential policy instrument for internalizing aviation’s climate impact of non-CO2 effects. Clim. Policy 2021, 21, 1066–1085. [Google Scholar] [CrossRef]
- Vitali, A.; Battipede, M.; Lerro, A. Multi-Objective and Multi-Phase 4D Trajectory Optimization for Climate Mitigation-Oriented Flight Planning. Aerospace 2021, 8, 395. [Google Scholar] [CrossRef]
- Niklaß, M.; Gollnick, V.; Lührs, B.; Dahlmann, K.; Froemming, C.; Grewe, V.; van Manen, J. Cost-benefit assessment of climate-restricted airspaces as an interim climate mitigation option. J. Air Transp. 2017, 25, 27–38. [Google Scholar] [CrossRef]
- Matthes, S.; Dahlmann, K.; Dietmüller, S.; Yamashita, H.; Baumann, S.; Grewe, V.; Soler, M.; Simorgh, A.; González Arribas, D.; Linke, F.; et al. Concept for Identifying Robust Eco-Efficient Aircraft Trajectories: Methodological Concept of Climate-Optimised Aircraft Trajectories in FlyATM4E; Deutsches Zentrum für Luft- und Raumfahrt (DLR), Institut für Physik der Atmosphäre: Oberpfaffenhofen, Germany, 2022; manuscript in preparation. [Google Scholar]
- Bauer, P.; Thorpe, A.; Brunet, G. The quiet revolution of numerical weather prediction. Nature 2015, 525, 47–55. [Google Scholar] [CrossRef] [PubMed]
- WMO. Guidelines on Ensemble Prediction Systems and Forecasting; World Meteorological Organization (WMO): Geneva, Switzerland, 2012. [Google Scholar]
- Council, A. Enhancing weather information with probability forecasts. Bull. Am. Meteorol. Soc. 2008, 89, 1049–1053. [Google Scholar]
- Krishnamurti, T.N.; Kishtawal, C.; Zhang, Z.; LaRow, T.; Bachiochi, D.; Williford, E.; Gadgil, S.; Surendran, S. Multimodel ensemble forecasts for weather and seasonal climate. J. Clim. 2000, 13, 4196–4216. [Google Scholar] [CrossRef]
- Komma, J.; Reszler, C.; Blöschl, G.; Haiden, T. Ensemble prediction of floods–catchment non-linearity and forecast probabilities. Nat. Hazards Earth Syst. Sci. 2007, 7, 431–444. [Google Scholar] [CrossRef] [Green Version]
- Fuel Cells and Hydrogen Joint Undertaking. In Hydrogen-Powered Aviation: A Fact-Based Study of Hydrogen Technology, Economics, and Climate Impact by 2050; FCH JU Publications: Luxembourg, 2020.
- Yin, F.; Grewe, V.; Gierens, K. Impact of Hybrid-Electric Aircraft on Contrail Coverage. Aerospace 2020, 7, 147. [Google Scholar] [CrossRef]
- Branicky, M.S.; Borkar, V.S.; Mitter, S.K. A unified framework for hybrid control: Model and optimal control theory. IEEE Trans. Autom. Control 1998, 43, 31–45. [Google Scholar] [CrossRef] [Green Version]
- Franco, A.; Rivas, D.; Valenzuela, A. Optimal aircraft path planning considering wind uncertainty. In Proceedings of the European Conference for Aeronautics and Space Sciences (EUCASS), Milan, Italy, 3–6 July 2017. [Google Scholar]
- Franco Espín, A.; Rivas Rivas, D.; Valenzuela Romero, A. Optimal Aircraft Path Planning in a Structured Airspace Using Ensemble Weather Forecasts. In Proceedings of the 8th SESAR Innovation Days, Salzburg, Austria, 3–7 December 2018. [Google Scholar]
- Legrand, K.; Puechmorel, S.; Delahaye, D.; Zhu, Y. Robust aircraft optimal trajectory in the presence of wind. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 30–38. [Google Scholar] [CrossRef]
- González-Arribas, D.; Soler, M.; Sanjurjo-Rivo, M. Robust aircraft trajectory planning under wind uncertainty using optimal control. J. Guid. Control Dyn. 2018, 41, 673–688. [Google Scholar] [CrossRef] [Green Version]
- González-Arribas, D.; Soler, M.; Sanjurjo-Rivo, M.; García-Heras, J.; Sacher, D.; Gelhardt, U.; Lang, J.; Hauf, T.; Simarro, J. Robust optimal trajectory planning under uncertain winds and convective risk. In ENRI International Workshop on ATM/CNS; Springer: Berlin/Heidelberg, Germany, 2017; pp. 82–103. [Google Scholar]
- Kamo, S.; Rosenow, J.; Fricke, H. CDO Sensitivity Analysis for Robust Trajectory Planning under Uncertain Weather Prediction. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–10. [Google Scholar] [CrossRef]
- González Arribas, D.; Andrés-Enderiz, E.; Soler, M.; Jardines, A.; García-Heras, J. Probabilistic 4D Flight Planning in Structured Airspaces through Parallelized Simulation on GPUs. In Proceedings of the 9th International Conference for Research in Air Transportation (ICRAT), Online, 15 September 2020. [Google Scholar]
- Von Stryk, O.; Bulirsch, R. Direct and indirect methods for trajectory optimization. Ann. Oper. Res. 1992, 37, 357–373. [Google Scholar] [CrossRef]
- Carraro, T.; Geiger, M.; Rannacher, R. Indirect multiple shooting for nonlinear parabolic optimal control problems with control constraints. SIAM J. Sci. Comput. 2014, 36, A452–A481. [Google Scholar] [CrossRef] [Green Version]
- Fidanova, S.; Ditzinger. Recent Advances in Computational Optimization; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Bertsekas, D. Reinforcement Learning and Optimal Control; Athena Scientific: Belmont, MA, USA, 2019. [Google Scholar]
- Powell, W.B. Approximate Dynamic Programming: Solving the Curses of Dimensionality; John Wiley & Sons: Hoboken, NJ, USA, 2007; Volume 703. [Google Scholar]
- Gill, P.E.; Murray, W.; Saunders, M.A. SNOPT: An SQP algorithm for large-scale constrained optimization. SIAM Rev. 2005, 47, 99–131. [Google Scholar] [CrossRef]
- Waltz, R.A.; Nocedal, J. KNITRO 2.0 User’s Manual. 2004 Ziena Optimization, Inc. Available online: http://www.ziena.com (accessed on 8 February 2022).
- Spellucci, P. DONLP2 Users Guide. 2002 TU Darmstadt. Available online: http://www.mathematik.tu-darmstadt.de/fbereiche/numerik/staff/spellucci/DONLP2 (accessed on 8 February 2022).
- Ferris, M. MATLAB and GAMS: Interfacing Optimization and Visualization Software; University of Wisconsin. Available online: http://research.cs.wisc.edu/math-prog/matlab.html (accessed on 8 February 2022).
- Biegler, L.T.; Zavala, V.M. Large-scale nonlinear programming using IPOPT: An integrating framework for enterprise-wide dynamic optimization. Comput. Chem. Eng. 2009, 33, 575–582. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cost Metrics | |
|---|---|
| Metric | Description |
| SOC | Estimates cost with linear relation to the flight time and fuel consumption [31]. |
| COC/DOC | Estimates cost considering other aspects in addition to the flight time and fuel consumption, including flight crew, cabin crew, landing fee, fuel, insurance, etc. [29,32]. |
| Climate Metrics | |
| Metric | Description |
| RF | Measures energy imbalance caused by changes in the Earth’s radiation balance between incoming solar radiation and thermal outgoing radiation [33]. |
| GWP | Measures how much energy is absorbed for the emission of a trace gas compared to that of equivalent over a time horizon [34]. |
| GTP | Measures global mean surface temperature change compared to an equivalent amount of at the end of a time horizon [35]. |
| ATR | Measures average temperature response over a time horizon (a derivative metric of GTP) [33]. |
| Non-Optimal Control Approach | ||||||
|---|---|---|---|---|---|---|
| Work | Module/Model | Method | Climate Variables (Metric) | Objective Function | Maneuvers (DoF) | No. Flights |
| Campbell et al. (2008) [71] | - | MILP/MIQP | Contrails (ISSR) | Contrail avoidance, fuel | 3D | Single |
| Campbell et al. (2009) [19] | - | MILP | Contrails (ISSR) | Contrail avoidance, fuel | 3D | Single |
| Wei et al. (2012) [72] | LP | Contrails (ISSR) | Contrail avoidance, fuel | 1D (Altitude) | Multiple | |
| Campbell et al. (2013) [73] | - | MILP | Contrails (ISSR) | Contrail avoidance, fuel | 3D | Single |
| Zou et al. (2014) [13] | - | IP | Contrails (SAC + ISSR → GWP) | Costs due to fuel burn, crew, passenger travel time, CO2 emission, contrail formation | 4D with constant speed | Multiple (44) |
| Celis et al. (2014) [36] | - | MADS and GA | NOx emission | NOx emission, time, fuel | 3D | Single |
| Lim et al. (2015) [74] | MOTO | NLP (fmincon in MATLAB) | Contrails (ISSR → RF) | RF of contrails | 3D (2D + T) | Single |
| Lim et al. (2016) [47] | MOTO | NLP (fmincon in MATLAB) | Contrails (ISSR → RF) | RF of contrails | 3D (2D + T) | Single |
| Foster et al. (2016) [30] | TOMATO | A for lateral path | (Contrails (ISSR), NOx, H2O, CO2, CO, Black carbon, H2SO4) (GWP) | DOC, GWP | 3D | Single |
| Rosenow et al. (2017) [75] | TOMATO | A for lateral path | (Contrails (ISSR), NOx, H2O, CO2, CO, Black carbon, H2SO4) (GWP) | DOC, GWP | 3D | Multiple (13,584) |
| Lim et al. (2017) [48] | MOTO | NLP (fmincon in MATLAB) | Contrails (ISSR → RF) | RF of contrails, distance, time, RF of CO2 emission | 3D (2D + T) | Single |
| Yin et al. (2018) [76] | EMAC/AirTraf 1.0 | GA | Short-term NOx effects (aCCF → ATR20) | Cost (time and fuel), ATR20 | 3D (with constant speed) | Multiple (85) |
| Yin et al. (2018) [46] | EMAC/AirTraf 1.0 | GA | Contrails (potcov) | Time + contrail distance | 3D (with constant speed) | Multiple (103) |
| Yamashita et al. (2020) [29] | EMAC/AirTraf 2.0 | GA | (Contrails (potcov), O3, CH4, H2O, CO2) (aCCF → ATR20) | Time, fuel, SOC, COC, NOx emission, H2O emission, contrail formation, ATR20 | 3D (with constant speed) | Multiple (103) |
| Rosenow et al. (2019) [32] | TOMATO | A for lateral path | (Contrails (ISSR), NOx, H2O, CO2, CO, Black carbon, H2SO4) (GWP) | DOC, GWP | 3D | Multiple (13,584) |
| Yamashita et al. (2021) [31] | EMAC/AirTraf 2.0 | GA | (Contrails (potcov), O3, CH4, H2O, CO2) aCCF → ATR20) | Time, fuel, COC, Contrail formation, ATR20 | 3D (with constant speed) | Multiple (103) |
| Optimal Control Approach | ||||||
|---|---|---|---|---|---|---|
| Work | Module/Model/Software | Method | Climate Variables (Metric) | Objective Function | Maneuvers (DoF) | No. Flights |
| Sridhar et al. (2010) [20] | - | Indirect (shooting) | Contrails (ISSR) | Contrail avoidance, fuel, time | 2D | Multiple (24, 12 city pairs) |
| Sridhar et al. (2010) [84] | - | Indirect (shooting) | Contrails (ISSR) | Contrail avoidance, fuel, time | 2D | Multiple (24, 12 city pairs) |
| Ng et al. (2011) [51] | - | Indirect (shooting) | Contrails (SAC + ISSR), (CO2, NOx H2O) (GWP) | Contrail avoidance, GWP of CO2, NOx, H2O, fuel, time | 2D | Multiple (15) |
| Sridhar et al. (2011) [40] | - | Indirect (shooting) | Contrails (SAC + ISSR) | Contrail avoidance, fuel, time | 2D | Multiple (24, 12 city pairs) |
| Soler et. al (2014) [39] | BONMIN (MINLP), IPOPT (NLP) | Mixed-integer optimal control | Contrails (SAC + ISSR → GWP) | Costs due to fuel burn, crew, passenger travel time, CO2 emission, and contrail avoidance | 4D | Single |
| Lührs et al. (2014) [85] | - | Indirect (shooting) | (Contrails, O3, CH4, H2O, CO2) (CCF → ATR20) | Time, ATR20total | 2D | Single |
| Hartjes et al. (2016) [86] | GPOPS (transcription) / SNOPT (NLP) | Direct (pseudospectral collocation, SQP for NLP) | Contrails (SAC + ISSR) | DOC, contrail avoidance | 3D | Single |
| Lührs et al. (2016) [87] | TOM (GPOPS (transcription) / IPOPT (NLP)) | Direct (pseudospectral collocation, IPT for NLP) | (Contrails, O3, CH4, H2O, CO2) (CCF → ATR20) | COC, ATR20total | 2D/3D | Multiple (9) |
| Niklaß et al. (2016) [88] | TOM (GPOPS (transcription) / IPOPT (NLP)) | Direct (pseudospectral collocation, IPT for NLP) | (Contrails, O3, CH4, H2O, CO2) (eCCF → ATR100) | COC, ATR100total (Climate-restricted airspace) | 4D | Single |
| Matthes et al. (2017) [89] | TOM (GPOPS (transcription) / IPOPT (NLP)) | Direct (pseudospectral collocation, IPT for NLP) | (Contrails, O3, CH4, H2O, CO2) (ECF → ATR(20,100)) | COC, ATR(20,100)total | 4D | Multiple |
| Niklaß et al. (2017) [16] | TOM (GPOPS (transcription)/ IPOPT (NLP)) | Direct (pseudospectral collocation, IPT for NLP) | (Contrails, O3, CH4, H2O, CO2) (eCCF → ATR100) | COC, ATR100total (Climate-restricted airspace) | 4D | Multiple (9) |
| Lührs et al. (2021) [90] | TOM (GPOPS (transcription) / IPOPT (NLP)) | Direct (pseudospectral collocation, IPT for NLP) | (Contrails (ISSR), O3, CH4, H2O, CO2) (aCCF → ATR20) | Fuel, ATR20total | 4D | Multiple (13,000) |
| Matthes et al. (2020) [91] | TOM (GPOPS (transcription) / IPOPT (NLP)) | Direct (pseudospectral collocation, IPT for NLP) | (Contrails (ISSR), O3, CH4, H2O, CO2) (aCCF → ATR20) | Fuel, ATR20total | 4D | Multiple (2000) |
| Niklaß et al. (2021) [92] | TOM (GPOPS (transcription) / IPOPT (NLP)) | Direct (pseudospectral collocation, IPT for NLP) | (Contrails, O3, CH4, H2O, CO2) (eCCF → ATR100) | COC + ATR100total (Climate-charged airspace) | 4D | Single |
| Vitali et al. (2021) [93] | - | Direct (Chebyshev pseudospectral collocation) | (Contrails (ISSR), CO2, NOx, H2O, soot, SO2) (GWP) | DOC, GWP(20, 50 and 100 years) | 4D | Single |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simorgh, A.; Soler, M.; González-Arribas, D.; Matthes, S.; Grewe, V.; Dietmüller, S.; Baumann, S.; Yamashita, H.; Yin, F.; Castino, F.; et al. A Comprehensive Survey on Climate Optimal Aircraft Trajectory Planning. Aerospace 2022, 9, 146. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace9030146
Simorgh A, Soler M, González-Arribas D, Matthes S, Grewe V, Dietmüller S, Baumann S, Yamashita H, Yin F, Castino F, et al. A Comprehensive Survey on Climate Optimal Aircraft Trajectory Planning. Aerospace. 2022; 9(3):146. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace9030146
Chicago/Turabian StyleSimorgh, Abolfazl, Manuel Soler, Daniel González-Arribas, Sigrun Matthes, Volker Grewe, Simone Dietmüller, Sabine Baumann, Hiroshi Yamashita, Feijia Yin, Federica Castino, and et al. 2022. "A Comprehensive Survey on Climate Optimal Aircraft Trajectory Planning" Aerospace 9, no. 3: 146. https://0-doi-org.brum.beds.ac.uk/10.3390/aerospace9030146