
A Review on Comparative Remarks, Performance Evaluation and Improvement Strategies of Quadrotor Controllers

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
1.1. Linear Control Techniques
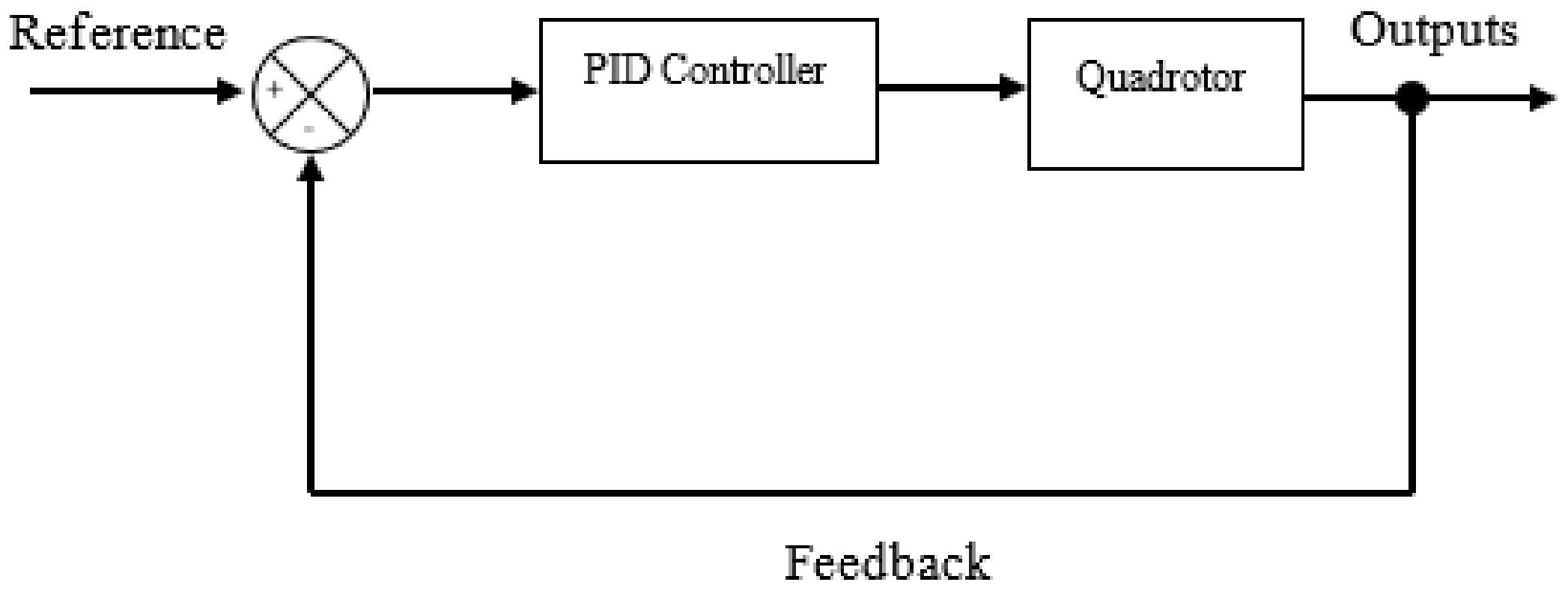
1.1.1. PID Controller
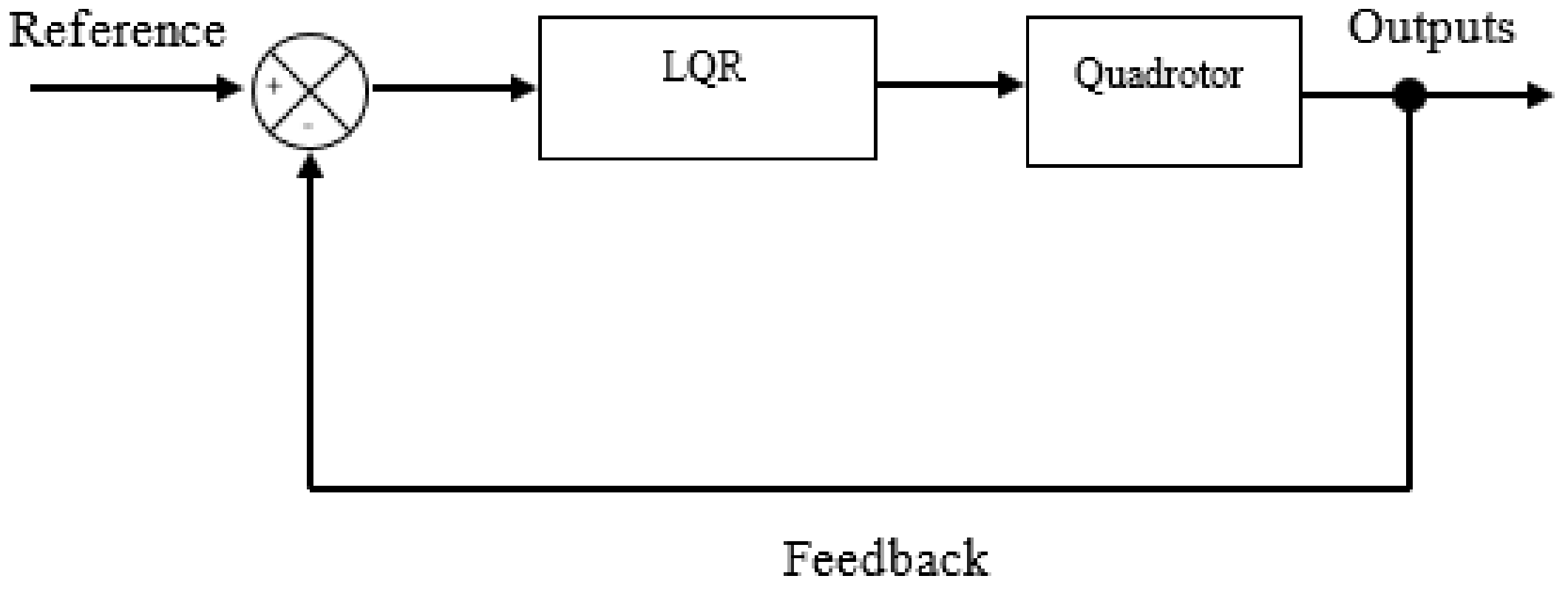
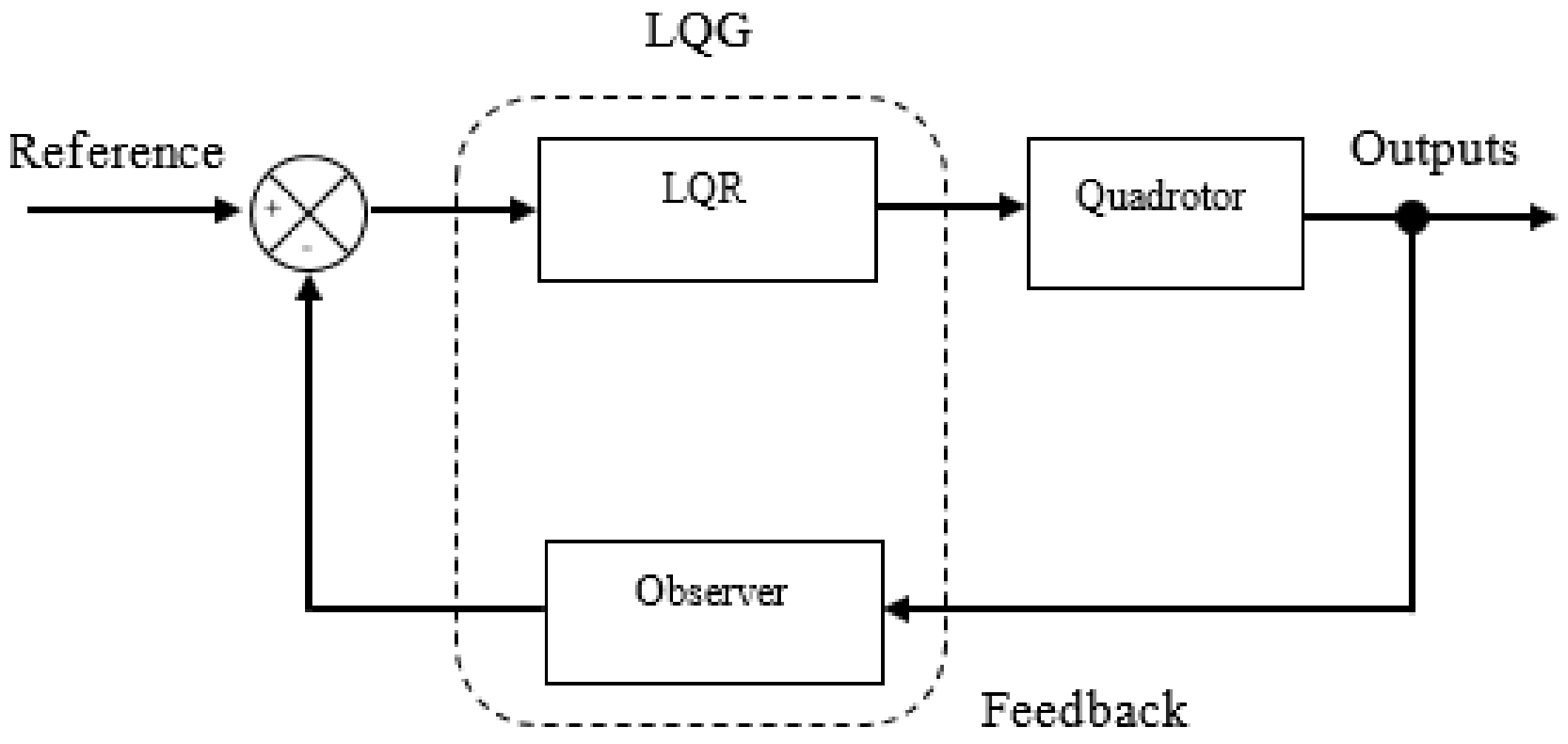
1.1.2. LQR Control
1.1.3. H∞
1.1.4. Gain-Scheduling
1.2. Nonlinear Control Techniques
1.2.1. Feedback Linearization
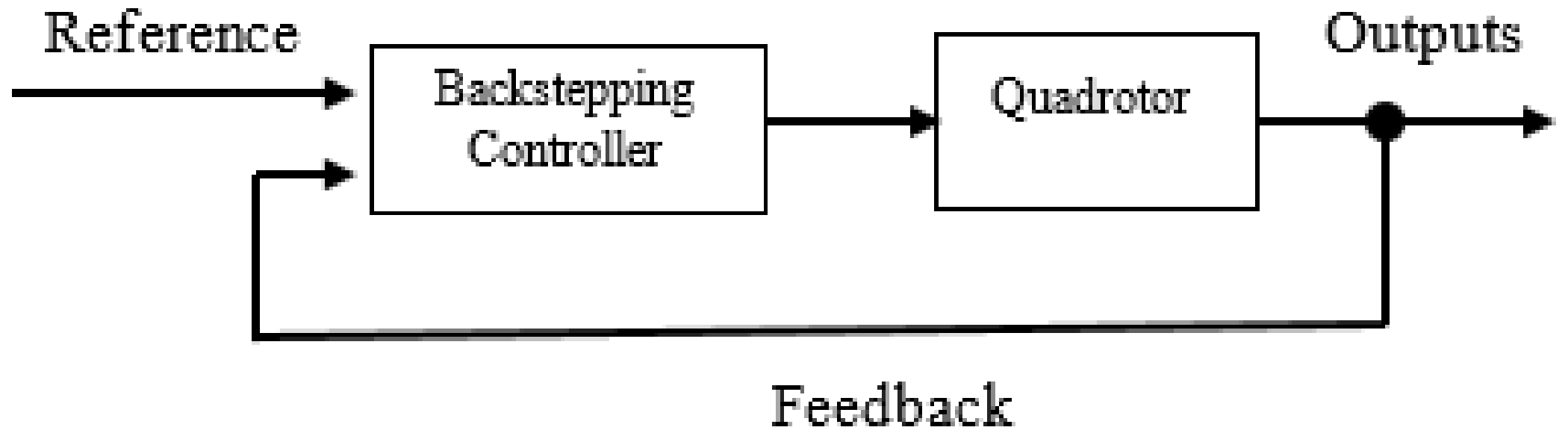
1.2.2. Backstepping
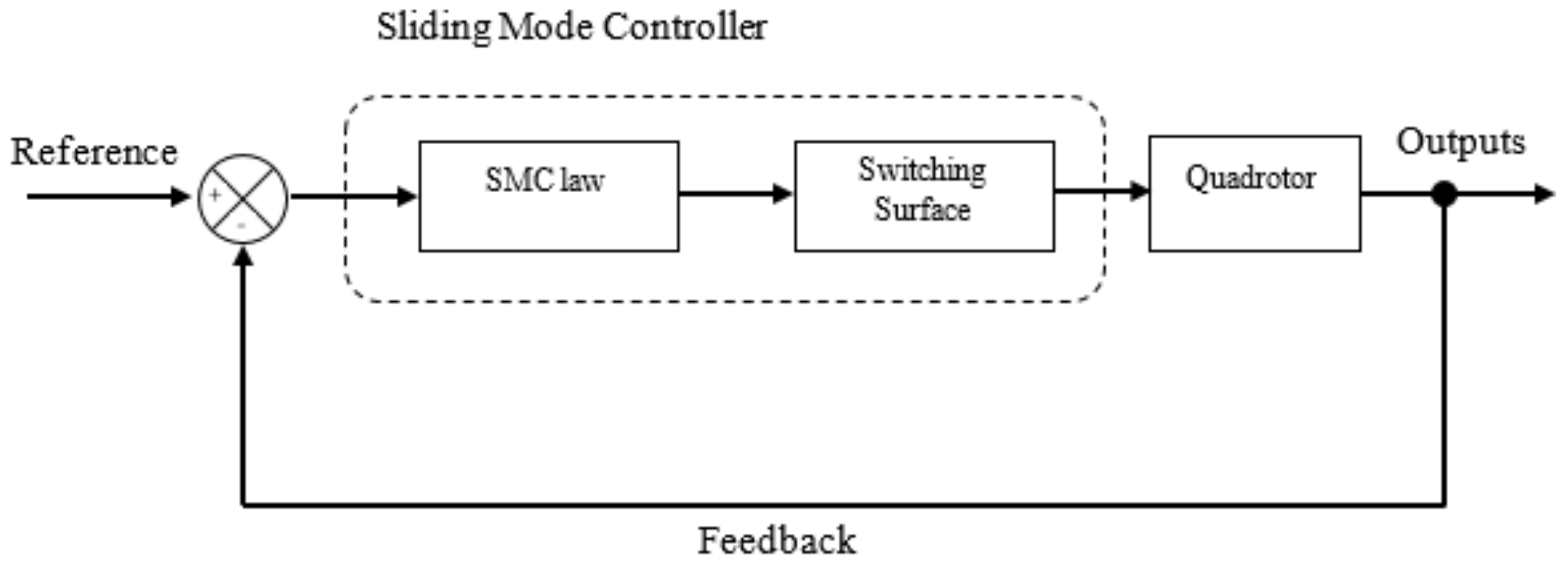
1.2.3. Sliding Mode
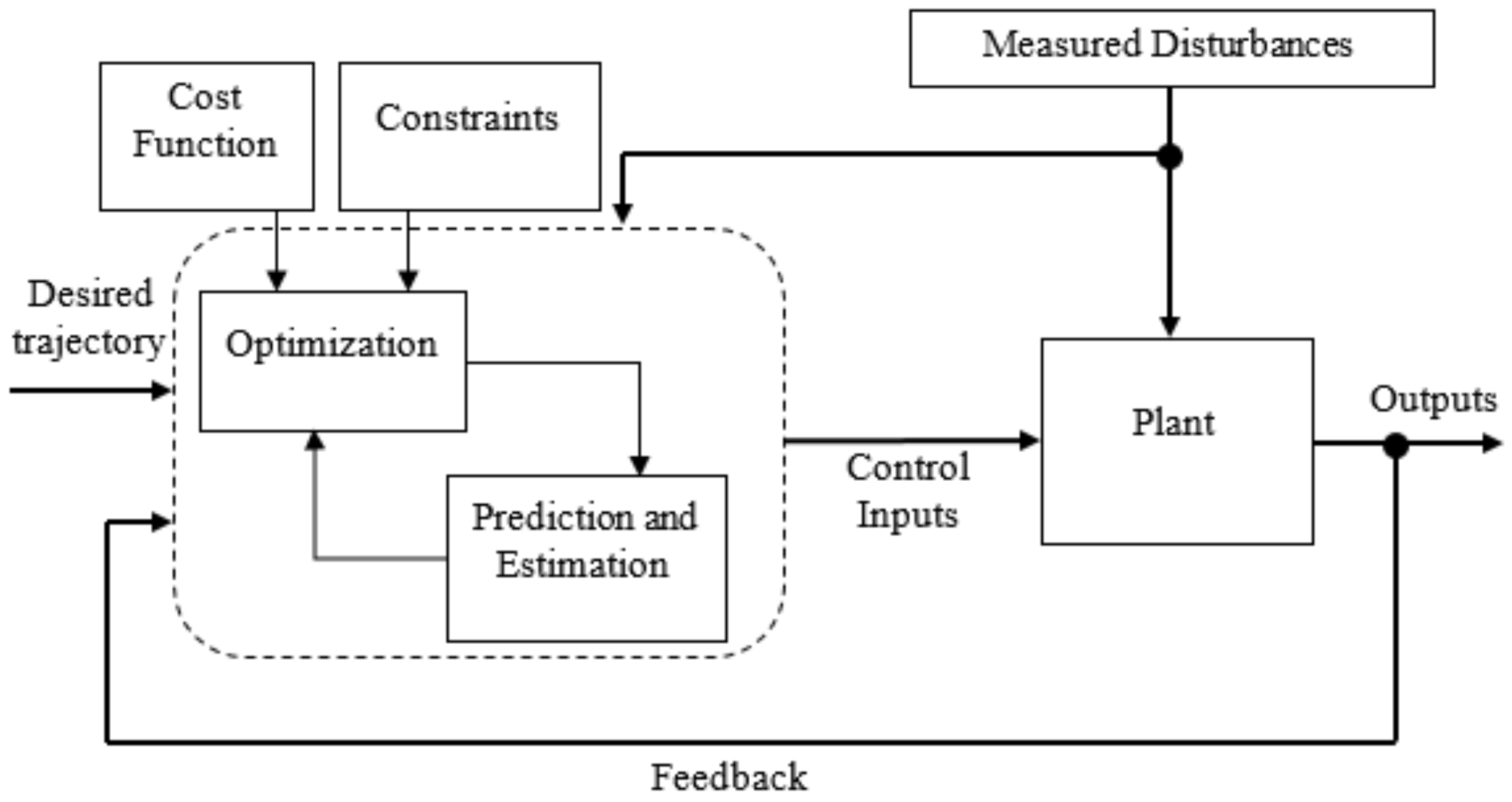
1.2.4. Model Predictive Control
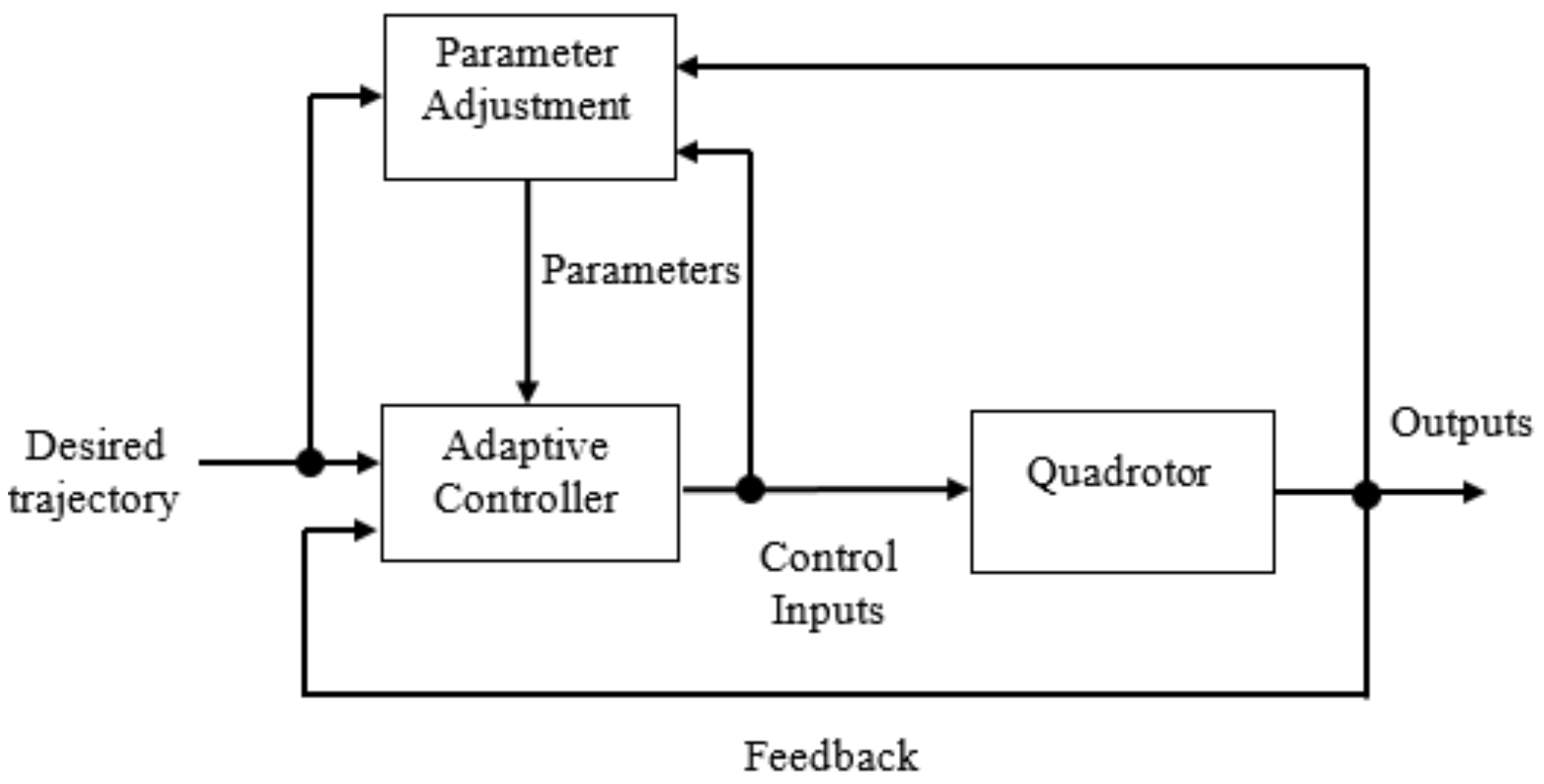
1.2.5. Adaptive Controller
1.3. Learning Based Control Techniques
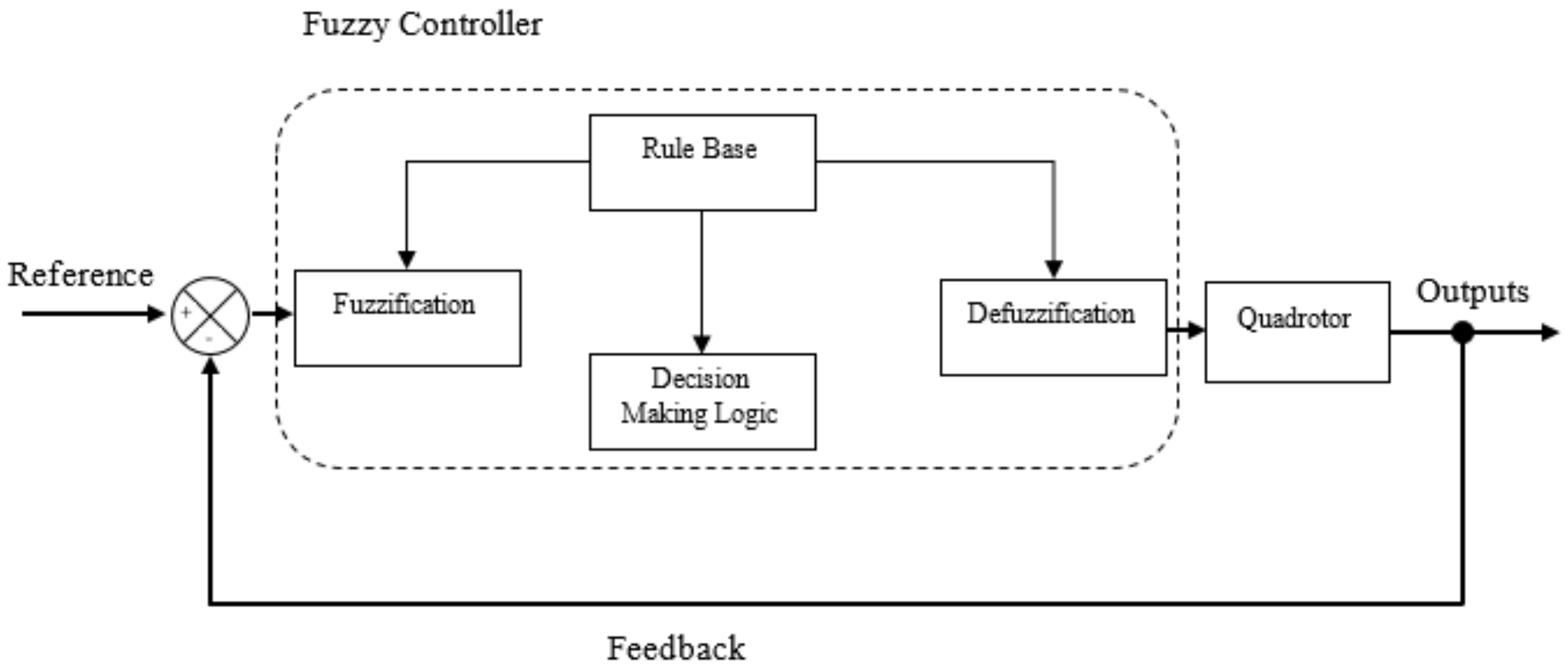
1.3.1. Fuzzy Logic Control
1.3.2. Neural Network Control
2. Evaluation of Controllers
2.1. Stability of Nominal System
2.2. Robustness
2.3. Complexities
3. Challenges and Solution
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- L’afflitto, A.; Anderson, R.B.; Mohammadi, K. An introduction to nonlinear robust control for unmanned quadrotor aircraft: How to design control algorithms for quadrotors using sliding mode control and adaptive control techniques [focus on education]. IEEE Control Syst. Mag. 2018, 38, 102–121. [Google Scholar] [CrossRef]
- Zulu, A.; John, S. A review of control algorithms for autonomous quadrotors. arXiv 2016, arXiv:1602.02622. [Google Scholar] [CrossRef] [Green Version]
- Junior, J.C.V.; De Paula, J.C.; Leandro, G.V.; Bonfim, M.C. Stability control of a quad-rotor using a PID controller. Braz. J. Instrum. Control 2013, 1, 15–20. [Google Scholar]
- Habib, M.K.; Abdelaal, W.G.A.; Saad, M.S. Dynamic Modeling and Control of a Quadrotor Using Linear and Nonlinear Approaches. Ph.D. Thesis, American University, Cairo, IL, USA, 2014. [Google Scholar]
- Kendoul, F. Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor aerial vehicles: Modeling, estimation, and control of quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Wang, K.; Lu, Y. A survey of modelling and identification of quadrotor robot. Abstr. Appl. Anal. 2014, 2014, 320526. [Google Scholar] [CrossRef]
- Li, Y.; Song, S. A survey of control algorithms for quadrotor unmanned helicopter. In Proceedings of the 2012 IEEE Fifth International Conference on Advanced Computational Intelligence (ICACI), Nanjing, China, 18–20 October 2012; pp. 365–369. [Google Scholar]
- Gupte, S.; Mohandas, P.I.T.; Conrad, J.M. A survey of quadrotor unmanned aerial vehicles. In Proceedings of the 2012 Proceedings of IEEE Southeastcon, Orlando, FL, USA, 15–18 March 2012; pp. 1–6. [Google Scholar]
- Nathan, P.T.; Almurib, H.A.; Kumar, T.N. A review of autonomous multi-agent quad-rotor control techniques and applications. In Proceedings of the 2011 4th International Conference on Mechatronics (ICOM), Kuala Lumpur, Malaysia, 17–19 May 2011; pp. 1–7. [Google Scholar]
- Amin, R.; Aijun, L.; Shamshirband, S. A review of quadrotor UAV: Control methodologies and performance evaluation. Int. J. Autom. Control 2016, 10, 87–103. [Google Scholar] [CrossRef]
- Deepak, B.; Singh, P. A survey on design and development of an unmanned aerial vehicle (quadcopter). Int. J. Intell. Unmanned Syst. 2016, 4, 70–106. [Google Scholar]
- Li, L.; Sun, L.; Jin, J. Survey of advances in control algorithms of quadrotor unmanned aerial vehicle. In Proceedings of the 2015 IEEE 16th International Conference on Communication Technology (ICCT), Hangzhou, China, 18–20 October 2015; pp. 107–111. [Google Scholar]
- Tayebi, A.; McGilvray, S. Attitude stabilization of a VTOL quadrotor aircraft. IEEE Trans. Control Syst. Technol. 2006, 14, 562–571. [Google Scholar] [CrossRef] [Green Version]
- Bouabdallah, S.; Noth, A.; Siegwart, R. PID vs. LQ control techniques applied to an indoor micro quadrotor. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2451–2456. [Google Scholar]
- Li, J.; Li, Y. Dynamic analysis and PID control for a quadrotor. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 573–578. [Google Scholar]
- Salih, A.L.; Moghavvemi, M.; Mohamed, H.A.; Gaeid, K.S. Modelling and PID controller design for a quadrotor unmanned air vehicle. In Proceedings of the 2010 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 28–30 May 2010; Volume 1, pp. 1–5. [Google Scholar]
- Salih, A.L.; Moghavvemi, M.; Mohamed, H.A.; Gaeid, K.S. Flight PID controller design for a UAV quadrotor. Sci. Res. Essays 2010, 5, 3660–3667. [Google Scholar]
- Jun, L.; Yuntang, L. Modeling and PID control for a quadrotor. J. Liaoning Tech. Univ. Nat. Sci. 2012, 1. Available online: https://en.cnki.com.cn/Article_en/CJFDTotal-GWDZ201216021.htm (accessed on 8 April 2021).
- Khatoon, S.; Gupta, D.; Das, L. PID & LQR control for a quadrotor: Modeling and simulation. In Proceedings of the 2014 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Delhi, India, 24–27 September 2014; pp. 796–802. [Google Scholar]
- Duc, M.N.; Trong, T.N.; Xuan, Y.S. The quadrotor MAV system using PID control. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 506–510. [Google Scholar]
- Sharma, A.; Barve, A. Controlling of quad-rotor uav using pid controller and fuzzy logic controller. Int. J. Electr. Electron. Comput. Eng. 2012, 1, 38–41. [Google Scholar]
- Wu, C.; Liu, X.; Yuan, X. Modeling and PID control for a quadrotor. Electron. Des. Eng. 2012, 16, 68–70. [Google Scholar]
- Nuchkrua, T.; Parnichkun, M. Identification and optimal control of quadrotor. Sci. Technol. Asia 2012, 17, 36–53. [Google Scholar]
- Rinaldi, F.; Gargioli, A.; Quagliotti, F. PID and LQ regulation of a multirotor attitude: Mathematical modelling, simulations and experimental results. J. Intell. Robot. Syst. 2014, 73, 33–50. [Google Scholar] [CrossRef]
- Khairuddin, I.M.; Majeed, A.P.; Lim, A.; M Jizat, J.A.; Jaafar, A.A. Modelling and PID Control of a Quadrotor Aerial Robot. In Advanced Materials Research; Trans Tech Publications Ltd.: Bäch, Switzerland, 2014; Volume 903, pp. 327–331. [Google Scholar]
- Li, X.; Chen, Y.; Chen, P. Quadrotor Tracking Control Based on PID Algorithm. Comput. Meas. Control 2016, 24, 109–112. [Google Scholar]
- Al Tahtawi, A.R.; Yusuf, M. Low-cost quadrotor hardware design with PID control system as flight controller. Telkomnika 2019, 17, 1923–1930. [Google Scholar] [CrossRef]
- Ghiglino, P.; Forshaw, J.L.; Lappas, V.J. Online PID self-tuning using an evolutionary swarm algorithm with experimental quadrotor flight results. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 5098. [Google Scholar]
- Reyes-Valeria, E.; Enriquez-Caldera, R.; Camacho-Lara, S.; Guichard, J. LQR control for a quadrotor using unit quaternions: Modeling and simulation. In Proceedings of the CONIELECOMP 2013, 23rd International Conference on Electronics, Communications and Computing, Cholula, Mexico, 11–13 March 2013; pp. 172–178. [Google Scholar]
- Tran, N.K.; Bulka, E.; Nahon, M. Quadrotor control in a wind field. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 320–328. [Google Scholar]
- Jafari, H.; Zareh, M.; Roshanian, J.; Nikkhah, A. An optimal guidance law applied to quadrotor using LQR method. Trans. Jpn. Soc. Aeronaut. Space Sci. 2010, 53, 32–39. [Google Scholar] [CrossRef] [Green Version]
- Panomrattanarug, B.; Higuchi, K.; Mora-Camino, F. Attitude control of a quadrotor aircraft using LQR state feedback controller with full order state observer. In Proceedings of the SICE Annual Conference 2013, Nagoya, Japan, 14–17 September 2013; pp. 2041–2046. [Google Scholar]
- Fan, B.; Sun, J.; Yu, Y. A LQR controller for a quadrotor: Design and experiment. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; pp. 81–86. [Google Scholar]
- Budiyono, A.; Lee, G.; Kim, G.B.; Park, J.; Kang, T.; Yoon, K.J. Control system design of a quad-rotor with collision detection. Aircr. Eng. Aerosp. Technol. Int. J. 2015, 8, 59–66. [Google Scholar] [CrossRef]
- Cowling, I.D.; Yakimenko, O.A.; Whidborne, J.F.; Cooke, A.K. A prototype of an autonomous controller for a quadrotor UAV. In Proceedings of the 2007 European Control Conference (ECC), Kos, Greece, 2–5 July 2007; pp. 4001–4008. [Google Scholar]
- Faiz Ahmed, S.; Kadir, K.; Kamran Joyo, M. LQR based controller design for altitude and longitudinal movement of quad-rotor. J. Appl. Sci. 2016, 16, 588–593. [Google Scholar] [CrossRef] [Green Version]
- Pounds, P.E.I. Design, Construction and Control of a Large Quadrotor Micro Air Vehicle. 2007. Available online: https://core.ac.uk/download/pdf/160609737.pdf (accessed on 30 April 2021).
- Araar, O.; Aouf, N. Quadrotor control for trajectory tracking in presence of wind disturbances. In Proceedings of the 2014 UKACC International Conference on Control (CONTROL), Loughborough, UK, 9–11 July 2014; pp. 25–30. [Google Scholar]
- Alsharif, M.A.; Arslantas, Y.E.; Hölzel, M.S. A comparison between advanced model-free PID and model-based LQI attitude control of a quadcopter using asynchronous android flight data. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 1023–1028. [Google Scholar]
- Argentim, L.M.; Rezende, W.C.; Santos, P.E.; Aguiar, R.A. PID, LQR and LQR-PID on a quadcopter platform. In Proceedings of the 2013 International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 17–18 May 2013; pp. 1–6. [Google Scholar]
- Kang, T.; Yoon, K.J.; Ha, T.H.; Lee, G. H-infinity control system design for a quad-rotor. J. Inst. Control Robot. Syst. 2015, 21, 14–20. [Google Scholar] [CrossRef]
- Gaitan, A.T.; Bolea, Y. Modeling and robust attitude control of a quadrotor system. In Proceedings of the 2013 10th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 30 September–4 October 2013; pp. 7–12. [Google Scholar]
- Sorensen, A. Autonomous Control of a Miniature Quadrotor Following Fast Trajectories. Master’s Thesis, Aalborg University, Aalborg, Denmark, 2010. [Google Scholar]
- Araar, O.; Aouf, N. Full linear control of a quadrotor UAV, LQ vs. H∞. In Proceedings of the 2014 UKACC International Conference on Control (CONTROL), Loughborough, UK, 9–11 July 2014; pp. 133–138. [Google Scholar]
- Raffo, G.V.; Ortega, M.G.; Rubio, F.R. MPC with nonlinear H∞ control for path tracking of a quad-rotor helicopter. IFAC Proc. Vol. 2008, 41, 8564–8569. [Google Scholar] [CrossRef] [Green Version]
- Raffo, G.V.; Ortega, M.G.; Rubio, F.R. Backstepping/nonlinear H∞ control for path tracking of a quadrotor unmanned aerial vehicle. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3356–3361. [Google Scholar]
- Jasim, W.; Gu, D. H∞ for quadrotor attitude stabilization. In Proceedings of the 2014 UKACC International Conference on Control (CONTROL), Loughborough, UK, 9–11 July 2014; pp. 19–24. [Google Scholar]
- Ortiz, J.P.; Minchala, L.I.; Reinoso, M.J. Nonlinear robust H-Infinity PID controller for the multivariable system quadrotor. IEEE Lat. Am. Trans. 2016, 14, 1176–1183. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Huzmezan, M. A combined mbpc/2 dof h infinity controller for a quad rotor uav. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Austin, TX, USA, 11–14 August 2003; p. 5520. [Google Scholar]
- Méndez Cubillos, X.C.; de Souza, L.C.G. Using of H-infinity control method in attitude control system of rigid-flexible satellite. Math. Probl. Eng. 2009, 2009, 173145. [Google Scholar] [CrossRef]
- Sadeghzadeh, I.; Abdolhosseini, M.; Zhang, Y.M. Payload drop application of unmanned quadrotor helicopter using gain-scheduled pid and model predictive control techniques. In Proceedings of the International Conference on Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 386–395. [Google Scholar]
- Milhim, A.; Zhang, Y.; Rabbath, C.A. Gain scheduling based PID controller for fault tolerant control of quad-rotor UAV. In AIAA Infotech@ Aerospace 2010; Concordia University: Montreal, QC, Canada, 2010; p. 3530. [Google Scholar]
- Sadeghzadeh, I.; Mehta, A.; Zhang, Y. Fault/damage tolerant control of a quadrotor helicopter UAV using model reference adaptive control and gain-scheduled PID. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011; p. 6716. [Google Scholar]
- Sadeghzadeh, I.; Mehta, A.; Chamseddine, A.; Zhang, Y. Active fault tolerant control of a quadrotor uav based on gainscheduled pid control. In Proceedings of the 2012 25th IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Montreal, QC, Canada, 29 April–2 May 2012; pp. 1–4. [Google Scholar]
- Sadeghzadeh, I.; Abdolhosseini, M.; Zhang, Y. Payload drop application using an unmanned quadrotor helicopter based on gain-scheduled PID and model predictive control. Unmanned Syst. 2014, 2, 39–52. [Google Scholar] [CrossRef]
- Sawyer, S. Gain-Scheduled Control of a Quadcopter UAV. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2015. [Google Scholar]
- Yang, Y.; Yan, Y. Attitude regulation for unmanned quadrotors using adaptive fuzzy gain-scheduling sliding mode control. Aerosp. Sci. Technol. 2016, 54, 208–217. [Google Scholar] [CrossRef]
- Yang, Y.; Yan, Y. Neural network gain-scheduling sliding mode control for three-dimensional trajectory tracking of robotic airships. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2015, 229, 529–540. [Google Scholar] [CrossRef]
- Freddi, A.; Lanzon, A.; Longhi, S. A feedback linearization approach to fault tolerance in quadrotor vehicles. IFAC Proc. Vol. 2011, 44, 5413–5418. [Google Scholar] [CrossRef] [Green Version]
- Elsamanty, M.; Khalifa, A.; Fanni, M.; Ramadan, A.; Abo-Ismail, A. Methodology for identifying quadrotor parameters, attitude estimation and control. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013; pp. 1343–1348. [Google Scholar]
- Ghandour, J.; Aberkane, S.; Ponsart, J.C. Feedback linearization approach for standard and fault tolerant control: Application to a quadrotor UAV testbed. J. Phys. Conf. Ser. 2014, 570, 082003. [Google Scholar] [CrossRef] [Green Version]
- Azzam, A.; Wang, X. Quad rotor arial robot dynamic modeling and configuration stabilization. In Proceedings of the 2010 2nd International Asia Conference on Informatics in Control, Automation and Robotics (CAR 2010), Wuhan, China, 6–7 March 2010; Volume 1, pp. 438–444. [Google Scholar]
- Jayakrishnan, H. Position and attitude control of a quadrotor UAV using super twisting sliding mode. IFAC-PapersOnLine 2016, 49, 284–289. [Google Scholar] [CrossRef]
- Lotufo, M.; Colangelo, L.; Perez-Montenegro, C.; Novara, C.; Canuto, E. Embedded model control for UAV quadrotor via feedback linearization. IFAC-PapersOnLine 2016, 49, 266–271. [Google Scholar] [CrossRef] [Green Version]
- Bonna, R.; Camino, J. Trajectory tracking control of a quadrotor using feedback linearization. In International Symposium on Dynamic Problems of Mechanics; University of Campinas: Sao Paulo, Brazil, 2015. [Google Scholar]
- Lanzon, A.; Freddi, A.; Longhi, S. Flight control of a quadrotor vehicle subsequent to a rotor failure. J. Guid. Control Dyn. 2014, 37, 580–591. [Google Scholar] [CrossRef]
- Mokhtari, A.; M’Sirdi, N.K.; Meghriche, K.; Belaidi, A. Feedback linearization and linear observer for a quadrotor unmanned aerial vehicle. Adv. Robot. 2006, 20, 71–91. [Google Scholar] [CrossRef] [Green Version]
- Pop, C.I.; Dulf, E.H.; Mueller, A. Robust feedback linearization control for reference tracking and disturbance rejection in nonlinear systems. In Recent Advances in Robust Control-Novel Approaches and Design Methods; Technical University of Cluj: Cluj-Napoca, Romania, 2011; pp. 273–290. [Google Scholar]
- Kurtz, M.J.; Henson, M.A. Feedback linearizing control of discrete-time nonlinear systems with input constraints. Int. J. Control 1998, 70, 603–616. [Google Scholar] [CrossRef]
- Altug, E.; Ostrowski, J.P.; Mahony, R. Control of a quadrotor helicopter using visual feedback. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation Cat. No. 02CH37292, Washington, DC, USA, 11–15 May 2002; Volume 1, pp. 72–77. [Google Scholar]
- Madani, T.; Benallegue, A. Backstepping control for a quadrotor helicopter. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3255–3260. [Google Scholar]
- Huo, X.; Huo, M.; Karimi, H.R. Attitude stabilization control of a quadrotor UAV by using backstepping approach. Math. Probl. Eng. 2014, 2014, 749803. [Google Scholar] [CrossRef]
- Fang, Z.; Gao, W. Adaptive integral backstepping control of a micro-quadrotor. In Proceedings of the 2011 2nd International Conference on Intelligent Control and Information Processing, Harbin, China, 25–28 July 2011; Volume 2, pp. 910–915. [Google Scholar]
- Niroumand, F.J.; Fakharian, A.; Seyedsajadi, M.S. Fuzzy integral backstepping control approach in attitude stabilization of a quadrotor UAV. In Proceedings of the 2013 13th Iranian Conference on Fuzzy Systems (IFSC), Qazvin, Iran, 27–29 August 2013; pp. 1–6. [Google Scholar]
- Chung, C.W.; Chang, Y. Design of Adaptive Backstepping Controller for Systems with Mismatched Perturbations to Achieve Asymptotical Stability. Available online: https://digital-library.theiet.org/content/journals/10.1049/iet-cta_20050383 (accessed on 30 April 2021).
- Mohd Basri, M.A.; Danapalasingam, K.A.; Husain, A.R. Design and optimization of backstepping controller for an underactuated autonomous quadrotor unmanned aerial vehicle. Trans. FAMENA 2014, 38, 27–44. [Google Scholar]
- Ben Ammar, N.; Bouallegue, S.; Haggege, J. Modeling and sliding mode control of a quadrotor unmanned aerial vehicle. In Proceedings of the 3rd International Conference on Automation, Control, Engineering and Computer Science; 2016; pp. 834–840. Available online: http://ipco-co.com/PET_Journal/Acecs-2016/134.pdf (accessed on 30 April 2021).
- Runcharoon, K.; Srichatrapimuk, V. Sliding mode control of quadrotor. In Proceedings of the 2013 The International Conference on Technological Advances in Electrical, Electronics and Computer Engineering (TAEECE), Konya, Turkey, 9–11 May 2013; pp. 552–557. [Google Scholar]
- Xu, R.; Ozguner, U. Sliding mode control of a quadrotor helicopter. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 4957–4962. [Google Scholar]
- Sudhir; Swamp, A. Second order sliding mode control for quadrotor. In Proceedings of the 2016 IEEE First International Conference on Control, Measurement and Instrumentation (CMI), Kolkata, India, 8–10 January 2016; pp. 92–96. [Google Scholar]
- Bendaas, I.; Naceri, F. A new method to minimize the chattering phenomenon in sliding mode control based on intelligent control for induction motor drives. Serbian J. Electr. Eng. 2013, 10, 231–246. [Google Scholar] [CrossRef]
- Levant, A. Principles of 2-sliding mode design. Automatica 2007, 43, 576–586. [Google Scholar] [CrossRef] [Green Version]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Introduction: Intuitive theory of sliding mode control. In Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014; pp. 1–42. [Google Scholar]
- Bouffard, P. On-Board Model Predictive Control of a Quadrotor Helicopter: Design, Implementation, and Experiments; Technical Report; California Univ. Berkeley Dept. of Computer Sciences: Berkeley, CA, USA, 2012. [Google Scholar]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Experimental model predictive attitude tracking control of a quadrotor helicopter subject to wind-gusts. In Proceedings of the 18th Mediterranean Conference on Control and Automation, MED’10, Marrakech, Morocco, 23–25 June 2010; pp. 1461–1466. [Google Scholar]
- Bangura, M.; Mahony, R. Real-time model predictive control for quadrotors. IFAC Proc. Vol. 2014, 47, 11773–11780. [Google Scholar] [CrossRef]
- Dentler, J.; Kannan, S.; Mendez, M.A.O.; Voos, H. A real-time model predictive position control with collision avoidance for commercial low-cost quadrotors. In Proceedings of the 2016 IEEE conference on control applications (CCA), Buenos Aires, Argentina, 19–22 September 2016; pp. 519–525. [Google Scholar]
- Jain, R.P.K. Transportation of Cable Suspended Load Using Unmanned Aerial Vehicles: A Real-Time Model Predictive Control Approach. 2015. Available online: https://www.semanticscholar.org/paper/Transportation-of-Cable-Suspended-Load-using-Aerial-Jain/7ed8122da4716c9b58289abd79d82feeb60f0a3e (accessed on 30 April 2021).
- Åström, K.J.; Wittenmark, B. Adaptive Control; Courier Corporation: Chelmsford, MA, USA, 2013. [Google Scholar]
- Nicol, C.; Macnab, C.; Ramirez-Serrano, A. Robust neural network control of a quadrotor helicopter. In Proceedings of the 2008 Canadian Conference on Electrical and Computer Engineering, Niagara Falls, ON, Canada, 4–7 May 2008; pp. 1233–1238. [Google Scholar]
- Li, S.; Wang, Y.; Tan, J.; Zheng, Y. Adaptive RBFNNs/integral sliding mode control for a quadrotor aircraft. Neurocomputing 2016, 216, 126–134. [Google Scholar] [CrossRef]
- Boudjedir, H.; Bouhali, O.; Rizoug, N. Adaptive neural network control based on neural observer for quadrotor unmanned aerial vehicle. Adv. Robot. 2014, 28, 1151–1164. [Google Scholar] [CrossRef]
- Lee, D.; Kim, H.J.; Sastry, S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter. Int. J. Control Autom. Syst. 2009, 7, 419–428. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S. Adaptive sliding mode control for finite-time stability of quad-rotor UAVs with parametric uncertainties. ISA Trans. 2018, 72, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Islam, S.; Faraz, M.; Ashour, R.; Cai, G.; Dias, J.; Seneviratne, L. Adaptive sliding mode control design for quadrotor unmanned aerial vehicle. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 34–39. [Google Scholar]
- Coza, C.; Macnab, C.J. A new robust adaptive-fuzzy control method applied to quadrotor helicopter stabilization. In Proceedings of the NAFIPS 2006-2006 Annual Meeting of the North American Fuzzy Information Processing Society, Montreal, QC, Canada, 3–6 June 2006; pp. 454–458. [Google Scholar]
- Huang, M.; Xian, B.; Diao, C.; Yang, K.; Feng, Y. Adaptive tracking control of underactuated quadrotor unmanned aerial vehicles via backstepping. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 2076–2081. [Google Scholar]
- Madani, T.; Benallegue, A. Adaptive control via backstepping technique and neural networks of a quadrotor helicopter. IFAC Proc. Vol. 2008, 41, 6513–6518. [Google Scholar] [CrossRef] [Green Version]
- Morel, Y.; Leonessa, A. Direct adaptive tracking control of quadrotor aerial vehicles. In ASME International Mechanical Engineering Congress and Exposition; Parts A and B; ASME: Chicago, IL, USA, 2006; pp. 155–161. [Google Scholar] [CrossRef] [Green Version]
- Fang, Z.; Gao, W. Adaptive backstepping control of an indoor micro-quadrotor. Res. J. Appl. Sci. Eng. Technol. 2012, 4, 4216–4226. [Google Scholar]
- Orsag, M.; Korpela, C.M.; Bogdan, S.; Oh, P.Y. Hybrid adaptive control for aerial manipulation. J. Intell. Robot. Syst. 2014, 73, 693–707. [Google Scholar] [CrossRef]
- Ghaffar, A.A.; Richardson, T. Model reference adaptive control and LQR control for quadrotor with parametric uncertainties. Int. J. Mech. Mechatron. Eng. 2015, 9, 244–250. [Google Scholar]
- Koshkouei, A.J.; Zinober, A.S. Adaptive backstepping control of nonlinear systems with unmatched uncertainty. In Proceedings of the 39th IEEE Conference on Decision and Control (Cat. No. 00CH37187), Sydney, NSW, Australia, 12–15 December 2000; Volume 5, pp. 4765–4770. [Google Scholar]
- Jiang, Y.; Yang, C.; Ma, H. A review of fuzzy logic and neural network based intelligent control design for discrete-time systems. Discret. Dyn. Nat. Soc. 2016, 2016, 7217364. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Cai, Z.; Lin, Q.; Wang, Y. Self-tuning PID control design for quadrotor UAV based on adaptive pole placement control. In Proceedings of the 2013 Chinese Automation Congress, Changsha, China, 7–8 November 2013; pp. 233–237. [Google Scholar]
- Dydek, Z.T.; Annaswamy, A.M.; Lavretsky, E. Adaptive control of quadrotor UAVs: A design trade study with flight evaluations. IEEE Trans. Control Syst. Technol. 2012, 21, 1400–1406. [Google Scholar] [CrossRef]
- Mohammadi, M.; Shahri, A.M. Adaptive nonlinear stabilization control for a quadrotor UAV: Theory, simulation and experimentation. J. Intell. Robot. Syst. 2013, 72, 105–122. [Google Scholar] [CrossRef]
- Leitner, J.; Calise, A.; Prasad, J. Analysis of adaptive neural networks for helicopter flight control. J. Guid. Control Dyn. 1997, 20, 972–979. [Google Scholar] [CrossRef] [Green Version]
- Zuo, Z.; Ru, P. Augmented L 1 adaptive tracking control of quad-rotor unmanned aircrafts. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3090–3101. [Google Scholar] [CrossRef]
- Hespanha, J.P.; Liberzon, D.; Morse, A.S. Overcoming the limitations of adaptive control by means of logic-based switching. Syst. Control Lett. 2003, 49, 49–65. [Google Scholar] [CrossRef] [Green Version]
- Feng, G. A survey on analysis and design of model-based fuzzy control systems. IEEE Trans. Fuzzy Syst. 2006, 14, 676–697. [Google Scholar] [CrossRef] [Green Version]
- Santos, M.; Lopez, V.; Morata, F. Intelligent fuzzy controller of a quadrotor. In Proceedings of the 2010 IEEE International Conference on Intelligent Systems and Knowledge Engineering, Hangzhou, China, 15–16 November 2010; pp. 141–146. [Google Scholar]
- Huang, X.; Ralescu, A.L.; Gao, H.; Huang, H. A survey on the application of fuzzy systems for underactuated systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 217–244. [Google Scholar] [CrossRef]
- Rabhi, A.; Chadli, M.; Pégard, C. Robust fuzzy control for stabilization of a quadrotor. In Proceedings of the 2011 15th International Conference on Advanced Robotics (ICAR), Tallinn, Estonia, 20–23 June 2011; pp. 471–475. [Google Scholar]
- Yazid, E.; Garratt, M.; Santoso, F. Position control of a quadcopter drone using evolutionary algorithms-based self-tuning for first-order Takagi–Sugeno–Kang fuzzy logic autopilots. Appl. Soft Comput. 2019, 78, 373–392. [Google Scholar] [CrossRef]
- Castillo-Toledo, B.; Di Gennaro, S.; Jurado, F. Trajectory tracking for a quadrotor via fuzzy regulation. In Proceedings of the World Automation Congress 2012, Puerto Vallarta, Mexico, 24–28 June 2012; pp. 1–6. [Google Scholar]
- Raharja, N.M.; Iswanto; Wahyunggoro, O.; Cahyadi, A.I. Altitude control for quadrotor with mamdani fuzzy model. In Proceedings of the 2015 International Conference on Science in Information Technology (ICSITech), Yogyakarta, Indonesia, 27–28 October 2015; pp. 309–314. [Google Scholar]
- Pedro, J.O.; Mathe, C. Nonlinear direct adaptive control of quadrotor UAV using fuzzy logic technique. In Proceedings of the 2015 10th Asian Control Conference (ASCC), Kota Kinabalu, Malaysia, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Chen, X.; Li, D.; Xu, Z.; Bai, Y. Robust control of quadrotor MAV using self-organizing interval type-II fuzzy neural networks (SOIT-IIFNNs) controller. Int. J. Intell. Comput. Cybern. 2011, 4, 397–412. [Google Scholar] [CrossRef]
- Chen, X.; Li, D.; Xu, Z.; Bai, Y. Gain adaptive sliding mode controller based on interval type-II fuzzy neural network designed for attitude control for micro aircraft vehicle. Int. J. Intell. Comput. Cybern. 2014, 7, 209–226. [Google Scholar] [CrossRef]
- Lee, H.J.; Park, J.B.; Chen, G. Robust fuzzy control of nonlinear systems with parametric uncertainties. IEEE Trans. Fuzzy Syst. 2001, 9, 369–379. [Google Scholar]
- Chen, C.L.; Chang, M.H. Optimal design of fuzzy sliding-mode control: A comparative study. Fuzzy Sets Syst. 1998, 93, 37–48. [Google Scholar] [CrossRef]
- Taniguchi, T.; Tanaka, K.; Ohtake, H.; Wang, H.O. Model construction, rule reduction, and robust compensation for generalized form of Takagi-Sugeno fuzzy systems. IEEE Trans. Fuzzy Syst. 2001, 9, 525–538. [Google Scholar] [CrossRef]
- Chen, Y.; Li, J.; Wang, K.; Ning, S. Robust trajectory tracking control of underactuated underwater vehicle subject to uncertainties. J. Mar. Sci. Technol. 2017, 25, 283–298. [Google Scholar]
- Yacef, F.; Bouhali, O.; Hamerlain, M.; Rizoug, N. Observer-based adaptive fuzzy backstepping tracking control of quadrotor unmanned aerial vehicle powered by Li-ion battery. J. Intell. Robot. Syst. 2016, 84, 179–197. [Google Scholar] [CrossRef]
- Baklouti, F.; Aloui, S.; Chaari, A. Adaptive fuzzy sliding mode tracking control of uncertain underactuated nonlinear systems: A comparative study. J. Control Sci. Eng. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Mo, H.; Farid, G. Nonlinear and adaptive intelligent control techniques for quadrotor uav–a survey. Asian J. Control 2019, 21, 989–1008. [Google Scholar] [CrossRef]
- Leondes, C.T. Neural Network Systems Techniques and Applications: Advances in Theory and Applications; Academic Press: New York, NY, USA, 1998. [Google Scholar]
- Dunfied, J.; Tarbouchi, M.; Labonte, G. Neural network based control of a four rotor helicopter. In Proceedings of the 2004 IEEE International Conference on Industrial Technology, 2004, IEEE ICIT’04, Hammamet, Tunisia, 8–10 December 2004; Volume 3, pp. 1543–1548. [Google Scholar]
- Guzey, H.M.; Dierks, T.; Jagannathan, S.; Acar, L. Modified consensus-based output feedback control of quadrotor UAV formations using neural networks. J. Intell. Robot. Syst. 2019, 94, 283–300. [Google Scholar] [CrossRef]
- Hamadi, A.M. Autonomous Quadrotor Control Using Convolutional Neural Networks. 2019. Available online: https://scholarworks.rit.edu/theses/9995/ (accessed on 30 April 2021).
- Islam, M.; Okasha, M.; Sulaeman, E.; Fatai, S.; Legowo, A. Performance evaluation of linear quadratic regulator and linear quadratic gaussian controllers on quadrotor platform. Int. J. Recent Technol. Eng. 2019, 7, 191–195. [Google Scholar]
- Garcia, R.; Rubio, F.; Ortega, M. Robust PID control of the quadrotor helicopter. IFAC Proc. Vol. 2012, 45, 229–234. [Google Scholar] [CrossRef] [Green Version]
- Tao, Y.; Xie, G.; Chen, Y.; Xiong, H.; Liu, H.; Zheng, J.; Gao, J. A PID and fuzzy logic based method for Quadrotor aircraft control motion. J. Intell. Fuzzy Syst. 2016, 31, 2975–2983. [Google Scholar] [CrossRef]
- Gautam, D.; Ha, C. Control of a quadrotor using a smart self-tuning fuzzy PID controller. Int. J. Adv. Robot. Syst. 2013, 10, 380. [Google Scholar] [CrossRef]
- Li, Y.; Song, S. Hovering control for quadrotor unmanned helicopter based on fuzzy self-tuning PID algorithm. Control Eng. China 2013, 20, 910–914. [Google Scholar]
- Gao, W.N.; Fan, J.L.; Li, Y.N. Research on neural network pid control algorithm for a quadrotor. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Bäch, Switzerland, 2015; Volume 719, pp. 346–351. [Google Scholar]
- Muliadi, J.; Kusumoputro, B. Neural network control system of UAV altitude dynamics and its comparison with the PID control system. J. Adv. Transp. 2018, 2018, 3823201. [Google Scholar] [CrossRef]
- Chen, Y.m.; He, Y.l.; Zhou, M.f. Decentralized PID neural network control for a quadrotor helicopter subjected to wind disturbance. J. Cent. South Univ. 2015, 22, 168–179. [Google Scholar] [CrossRef]
- Chen, Y.; He, Y.; Kong, L.; Zhou, M. Decentralized PID neural network control for a quadrotor helicopter. J. Chin. Inert. Technol. 2014, 22, 185–190. [Google Scholar]
- Zhou, Q.L.; Zhang, Y.; Rabbath, C.A.; Theilliol, D. Design of feedback linearization control and reconfigurable control allocation with application to a quadrotor UAV. In Proceedings of the 2010 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 6–8 October 2010; pp. 371–376. [Google Scholar]
- Zhang, D.; Qi, H.; Wu, X.; Xie, Y.; Xu, J. The quadrotor dynamic modeling and indoor target tracking control method. Math. Probl. Eng. 2014, 2014, 637034. [Google Scholar] [CrossRef] [Green Version]
- Mian, A.A.; Daobo, W. Modeling and backstepping-based nonlinear control strategy for a 6 DOF quadrotor helicopter. Chin. J. Aeronaut. 2008, 21, 261–268. [Google Scholar] [CrossRef] [Green Version]
- Colorado, J.; Barrientos, A.; Martinez, A.; Lafaverges, B.; Valente, J. Mini-quadrotor attitude control based on Hybrid Backstepping & Frenet-Serret theory. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 1617–1622. [Google Scholar]
- Mian, A.A.; Ahmad, M.I.; Wang, D. Backstepping based PID control strategy for an underactuated aerial robot. IFAC Proc. Vol. 2008, 41, 15636–15641. [Google Scholar] [CrossRef] [Green Version]
- Tuan, L.L.; Won, S. PID based sliding mode controller design for the micro quadrotor. In Proceedings of the 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Korea, 20–23 October 2013; pp. 1860–1865. [Google Scholar]
- Bouzid, Y.; Siguerdidjane, H.; Bestaoui, Y. Sliding modes based nonlinear PID controller for quadrotor: Theory and experiment. In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017), Madrid, Spain, 26–28 July 2017; Volume 1, p. 286. [Google Scholar]
- Goodarzi, F.; Lee, D.; Lee, T. Geometric nonlinear PID control of a quadrotor UAV on SE (3). In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 3845–3850. [Google Scholar]
- Kaiyuan, S.J.F.P.C. Attitude control of quadrotor aircraft via nonlinear PID. J. Beijing Univ. Aeronaut. Astronaut. 2011, 9, 1054. [Google Scholar]
- Bani Milhim, A.; Zhang, Y.; Rabbath, C.A. Quad-Rotor UAV: High-Fidelity Modeling and Nonlinear PID Control. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Toronto, ON, Canada, 2–5 August 2010; p. 8362. [Google Scholar]
- Gonzalez-Vazquez, S.; Moreno-Valenzuela, J. A new nonlinear PI/PID controller for quadrotor posture regulation. In Proceedings of the 2010 IEEE Electronics, Robotics and Automotive Mechanics Conference, Cuernavaca, Mexico, 28 September–1 October 2010; pp. 642–647. [Google Scholar]
- Moreno-Valenzuela, J.; Pérez-Alcocer, R.; Guerrero-Medina, M.; Dzul, A. Nonlinear PID-type controller for quadrotor trajectory tracking. IEEE/ASME Trans. Mechatron. 2018, 23, 2436–2447. [Google Scholar] [CrossRef]
- Szafranski, G.; Czyba, R. Different Approaches of PID Control UAV Type Quadrotor. 2011. Available online: http://www.imavs.org/papers2011/73_IMAV2011_Summer_Proceedings.pdf (accessed on 30 April 2021).
- Ren, J.; Liu, D.X.; Li, K.; Liu, J.; Feng, Y.; Lin, X. Cascade PID controller for quadrotor. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 120–124. [Google Scholar]
- Zhu, J.; Liu, E.; Guo, S.; Xu, C. A gradient optimization based PID tuning approach on quadrotor. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015; pp. 1588–1593. [Google Scholar]
- Kim, J.; Wilkerson, S.A.; Gadsden, S.A. Comparison of gradient methods for gain tuning of a PD controller applied on a quadrotor system. In Unmanned Systems Technology XVIII; International Society for Optics and Photonics: Washington, DC, USA, 2016; Volume 9837, p. 98370V. [Google Scholar]
- Mohammed, M.J.; Rashid, M.T.; Ali, A.A. Design optimal PID controller for quad rotor system. Int. J. Comput. Appl. 2014, 106, 15–20. [Google Scholar]
- Babu, V.M.; Das, K.; Kumar, S. Designing of self tuning PID controller for AR drone quadrotor. In Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR), Hong Kong, China, 10–12 July 2017; pp. 167–172. [Google Scholar]
- Alkamachi, A.; Erçelebi, E. Modelling and genetic algorithm based-PID control of H-shaped racing quadcopter. Arab. J. Sci. Eng. 2017, 42, 2777–2786. [Google Scholar] [CrossRef]
- Bolandi, H.; Rezaei, M.; Mohsenipour, R.; Nemati, H.; Smailzadeh, S.M. Attitude Control of a Quadrotor with Optimized PID Controller. 2013. Available online: https://www.scirp.org/pdf/ica_2013080911251379.pdf (accessed on 30 April 2021).
- Jiahe, F.; Rui, L. Fractional PID and backstepping control for a small quadrotor helicopter. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 5701–5706. [Google Scholar]
- Pipatpaibul, P.i.; Ouyang, P. Application of online iterative learning tracking control for quadrotor UAVs. Int. Sch. Res. Not. 2013, 2013. [Google Scholar] [CrossRef] [Green Version]
- Xu, D.; Whidborne, J.F.; Cooke, A. Fault tolerant control of a quadrotor using C 1 adaptive control. Int. J. Intell. Unmanned Syst. 2016, 4, 43–66. [Google Scholar] [CrossRef] [Green Version]
- Shulong, Z.; Honglei, A.; Daibing, Z.; Lincheng, S. A new feedback linearization lqr control for attitude of quadrotor. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 1593–1597. [Google Scholar]
- Honglei, A.; Jie, L.; Jian, W.; Jianwen, W.; Hongxu, M. Backstepping-based inverse optimal attitude control of quadrotor. Int. J. Adv. Robot. Syst. 2013, 10, 223. [Google Scholar] [CrossRef]
- Öner, K.T.; Çetinsoy, E.; Sırımoğlu, E.; Hancer, C.; Ayken, T.; Ünel, M. LQR and SMC Stabilization of a New Unmanned Aerial Vehicle. 2009. Available online: http://research.sabanciuniv.edu/12653/1/v58-94.pdf (accessed on 30 April 2021).
- Liu, Z.; Yuan, C.; Zhang, Y.; Luo, J. A learning-based fuzzy lqr control scheme for height control of an unmanned quadrotor helicopter. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 936–941. [Google Scholar]
- Bansal, S.; Akametalu, A.K.; Jiang, F.J.; Laine, F.; Tomlin, C.J. Learning quadrotor dynamics using neural network for flight control. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 4653–4660. [Google Scholar]
- Suicmez, E.C.; Kutay, A.T. Optimal path tracking control of a quadrotor UAV. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 115–125. [Google Scholar]
- Henriques, B.S.M. Estimation and Control of a Quadrotor Attitude. Master’s Thesis, Instituto Superior Técnico, Lisbon University, Lisbon, Portugal, 2011. [Google Scholar]
- Zhang, K.; Chen, J.; Chang, Y.; Shi, Y. EKF-based LQR tracking control of a quadrotor helicopter subject to uncertainties. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 5426–5431. [Google Scholar]
- Kodgirwar, V.; Kumar, V.; Sawant, S.; Shegokar, M. Design of control system for quadcopter using Complementary Filter and PID controller. Int. J. Eng. Res. Technol. 2014, 3, 2278-0181. [Google Scholar]
- Joyo, M.K.; Ahmed, S.F.; Hazry, D.; Tanveer, M.H.; Warsi, F.A. Position controller design for quad-rotor under perturbed condition. Wulfenia J. 2013, 20, 178–189. [Google Scholar]
- Cowling, I.D.; Whidborne, J.F.; Cooke, A.K. Optimal trajectory planning and LQR control for a quadrotor UAV. In Proceedings of the International Conference on Control, Cranfield University, Bedford, UK, 30 August–1 September 2006. [Google Scholar]
- Mu, B.; Shi, Y. Distributed LQR consensus control for heterogeneous multiagent systems: Theory and experiments. IEEE/ASME Trans. Mechatron. 2018, 23, 434–443. [Google Scholar] [CrossRef]
- Sun, Y.; Xian, N.; Duan, H. Linear-quadratic regulator controller design for quadrotor based on pigeon-inspired optimization. Aircr. Eng. Aerosp. Technol. 2016, 88, 761–770. [Google Scholar] [CrossRef]
- van den Berg, J. Extended LQR: Locally-optimal feedback control for systems with non-linear dynamics and non-quadratic cost. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2016; pp. 39–56. [Google Scholar]
- Ryan, T.; Kim, H.J. PD-Tunable H∞ Control Design for a Quadrotor. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 4530. [Google Scholar]
- Mokhtari, A.; Benallegue, A.; Daachi, B. Robust feedback linearization and GH/sub/spl infin//controller for a quadrotor unmanned aerial vehicle. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 1198–1203. [Google Scholar]
- Mukherjee, P.; Waslander, S. Direct adaptive feedback linearization for quadrotor control. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4917. [Google Scholar]
- Choi, I.; Bang, H. Quadrotor-tracking controller design using adaptive dynamic feedback-linearization method. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 2329–2342. [Google Scholar] [CrossRef]
- Benallegue, A.; Mokhtari, A.; Fridman, L. Feedback linearization and high order sliding mode observer for a quadrotor UAV. In Proceedings of the International Workshop on Variable Structure Systems, 2006, VSS’06, Alghero, Italy, 5–7 June 2006; pp. 365–372. [Google Scholar]
- Al-Hiddabi, S.A. Quadrotor control using feedback linearization with dynamic extension. In Proceedings of the 2009 6th International Symposium on Mechatronics and Its Applications, Sharjah, United Arab Emirates, 23–26 March 2009; pp. 1–3. [Google Scholar]
- Sydney, N.; Smyth, B.; Paley, D.A. Dynamic control of autonomous quadrotor flight in an estimated wind field. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 3609–3616. [Google Scholar]
- Aboudonia, A.; El-Badawy, A.; Rashad, R. Disturbance observer-based feedback linearization control of an unmanned quadrotor helicopter. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 877–891. [Google Scholar] [CrossRef]
- Lee, K.; Back, J.; Choy, I. Nonlinear disturbance observer based robust attitude tracking controller for quadrotor UAVs. Int. J. Control Autom. Syst. 2014, 12, 1266–1275. [Google Scholar] [CrossRef]
- Mian, A.A.; Wang, D.b. Dynamic modeling and nonlinear control strategy for an underactuated quad rotor rotorcraft. J. Zhejiang Univ. Sci. A 2008, 9, 539–545. [Google Scholar] [CrossRef]
- Duong, V.T.; Kim, H.K.; Nguyen, T.T.; Oh, S.J.; Kim, S.B. Position control of a small scale quadrotor using block feedback linearization control. In AETA 2013: Recent Advances in Electrical Engineering and Related Sciences; Springer: Berlin/Heidelberg, Germany, 2014; pp. 525–534. [Google Scholar]
- Mahmood, A.; Kim, Y. Decentrailized formation flight control of quadcopters using robust feedback linearization. J. Frankl. Inst. 2017, 354, 852–871. [Google Scholar] [CrossRef]
- Das, A.; Lewis, F.; Subbarao, K. Backstepping approach for controlling a quadrotor using lagrange form dynamics. J. Intell. Robot. Syst. 2009, 56, 127–151. [Google Scholar] [CrossRef]
- Mohd Basri, M.A.; Husain, A.R.; Danapalasingam, K.A. Intelligent adaptive backstepping control for MIMO uncertain non-linear quadrotor helicopter systems. Trans. Inst. Meas. Control 2015, 37, 345–361. [Google Scholar] [CrossRef]
- Bouadi, H.; Bouchoucha, M.; Tadjine, M. Sliding mode control based on backstepping approach for an UAV type-quadrotor. World Acad. Sci. Eng. Technol. 2007, 26, 22–27. [Google Scholar]
- Chen, F.; Jiang, R.; Zhang, K.; Jiang, B.; Tao, G. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV. IEEE Trans. Ind. Electron. 2016, 63, 5044–5056. [Google Scholar] [CrossRef]
- Madani, T.; Benallegue, A. Backstepping control with exact 2-sliding mode estimation for a quadrotor unmanned aerial vehicle. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 141–146. [Google Scholar]
- Nadda, S.; Swarup, A. Development of backstepping based sliding mode control for a quadrotor. In Proceedings of the 2014 IEEE 10th International Colloquium on Signal Processing and Its Applications, Kuala Lumpur, Malaysia, 7–9 March 2014; pp. 10–13. [Google Scholar]
- Antonio-Toledo, M.E.; Sanchez, E.N.; Alanis, A.Y.; Flórez, J.; Perez-Cisneros, M.A. Real-time integral backstepping with sliding mode control for a quadrotor UAV. IFAC-PapersOnLine 2018, 51, 549–554. [Google Scholar] [CrossRef]
- Ramirez-Rodriguez, H.; Parra-Vega, V.; Sanchez-Orta, A.; Garcia-Salazar, O. Robust backstepping control based on integral sliding modes for tracking of quadrotors. J. Intell. Robot. Syst. 2014, 73, 51–66. [Google Scholar] [CrossRef]
- Jia, Z.; Yu, J.; Mei, Y.; Chen, Y.; Shen, Y.; Ai, X. Integral backstepping sliding mode control for quadrotor helicopter under external uncertain disturbances. Aerosp. Sci. Technol. 2017, 68, 299–307. [Google Scholar] [CrossRef]
- Zeghlache, S.; Saigaa, D.; Harrag, A.; Kara, K.; Bouguerra, A. Backstepping sliding mode controller improved with fuzzy logic: Application to the quadrotor helicopter. Arch. Control Sci. 2012, 22, 315–342. [Google Scholar] [CrossRef] [Green Version]
- Khebbache, H.; Tadjine, M. Robust fuzzy backstepping sliding mode controller for a quadrotor unmanned aerial vehicle. J. Control Eng. Appl. Inform. 2013, 15, 3–11. [Google Scholar]
- Basri, M.A.M.; Husain, A.R.; Danapalasingam, K.A. Enhanced backstepping controller design with application to autonomous quadrotor unmanned aerial vehicle. J. Intell. Robot. Syst. 2015, 79, 295–321. [Google Scholar] [CrossRef]
- Zuo, Z. Trajectory tracking control design with command-filtered compensation for a quadrotor. IET Control Theory Appl. 2010, 4, 2343–2355. [Google Scholar] [CrossRef]
- Gong, X.; Bai, Y.; Peng, C.; Zhao, C.; Tian, Y. Trajectory tracking control of a quad-rotor UAV based on command filtered backstepping. In Proceedings of the 2012 Third International Conference on Intelligent Control and Information Processing, Dalian, China, 15–17 July 2012; pp. 179–184. [Google Scholar]
- Jasim, W.; Gu, D. Integral backstepping controller for quadrotor path tracking. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 593–598. [Google Scholar]
- Poultney, A.; Gong, P.; Ashrafiuon, H. Integral backstepping control for trajectory and yaw motion tracking of quadrotors. Robotica 2019, 37, 300. [Google Scholar] [CrossRef]
- Chen, F.; Lei, W.; Zhang, K.; Tao, G.; Jiang, B. A novel nonlinear resilient control for a quadrotor UAV via backstepping control and nonlinear disturbance observer. Nonlinear Dyn. 2016, 85, 1281–1295. [Google Scholar] [CrossRef]
- Pollini, L.; Metrangolo, A. Simulation and robust backstepping control of a quadrotor aircraft. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 6363. [Google Scholar]
- Regula, G.; Lantos, B. Backstepping based control design with state estimation and path tracking to an indoor quadrotor helicopter. Period. Polytech. Electr. Eng. 2009, 53, 151–161. [Google Scholar] [CrossRef] [Green Version]
- Aboudonia, A.; El-Badawy, A.; Rashad, R. Active anti-disturbance control of a quadrotor unmanned aerial vehicle using the command-filtering backstepping approach. Nonlinear Dyn. 2017, 90, 581–597. [Google Scholar] [CrossRef]
- Li, C.; Zhang, Y.; Li, P. Full control of a quadrotor using parameter-scheduled backstepping method: Implementation and experimental tests. Nonlinear Dyn. 2017, 89, 1259–1278. [Google Scholar] [CrossRef]
- Zhen, H.; Qi, X.; Dong, H. An adaptive block backstepping controller for attitude stabilization of a quadrotor helicopter. WSEAS Trans. Syst. Control 2013, 8, 46–55. [Google Scholar]
- Mohd Basri, M.A.; Husain, A.R.; Danapalasingam, K.A. A hybrid optimal backstepping and adaptive fuzzy control for autonomous quadrotor helicopter with time-varying disturbance. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 2178–2195. [Google Scholar] [CrossRef]
- Shao, X.; Liu, J.; Wang, H. Robust back-stepping output feedback trajectory tracking for quadrotors via extended state observer and sigmoid tracking differentiator. Mech. Syst. Signal Process. 2018, 104, 631–647. [Google Scholar] [CrossRef]
- Wang, R.; Liu, J. Trajectory tracking control of a 6-DOF quadrotor UAV with input saturation via backstepping. J. Frankl. Inst. 2018, 355, 3288–3309. [Google Scholar] [CrossRef]
- Lee, K.U.; Choi, Y.H.; Park, J.B. Backstepping based formation control of quadrotors with the state transformation technique. Appl. Sci. 2017, 7, 1170. [Google Scholar] [CrossRef] [Green Version]
- Rosaldo-Serrano, M.A.; Santiaguillo-Salinas, J.; Aranda-Bricaire, E. Observer-based time-varying backstepping control for a quadrotor multi-agent system. J. Intell. Robot. Syst. 2019, 93, 135–150. [Google Scholar] [CrossRef]
- Patel, A.R.; Patel, M.A.; Vyas, D.R. Modeling and analysis of quadrotor using sliding mode control. In Proceedings of the 2012 44th Southeastern Symposium on System Theory (SSST), Jacksonville, FL, USA, 11–13 March 2012; pp. 111–114. [Google Scholar]
- Herrera, M.; Chamorro, W.; Gómez, A.P.; Camacho, O. Sliding mode control: An approach to control a quadrotor. In Proceedings of the 2015 Asia-Pacific Conference on Computer Aided System Engineering, Quito, Ecuador, 14–16 July 2015; pp. 314–319. [Google Scholar]
- Fang, Z.; Zhi, Z.; Jun, L.; Jian, W. Feedback linearization and continuous sliding mode control for a quadrotor UAV. In Proceedings of the 2008 27th Chinese Control Conference, Kunming, China, 16–18 July 2008; pp. 349–353. [Google Scholar]
- Gong, X.; Hou, Z.C.; Zhao, C.J.; Bai, Y.; Tian, Y.T. Adaptive backstepping sliding mode trajectory tracking control for a quad-rotor. Int. J. Autom. Comput. 2012, 9, 555–560. [Google Scholar] [CrossRef]
- Besnard, L.; Shtessel, Y.B.; Landrum, B. Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer. J. Frankl. Inst. 2012, 349, 658–684. [Google Scholar] [CrossRef]
- Bouadi, H.; Tadjine, M. Nonlinear observer design and sliding mode control of four rotors helicopter. Int. J. Mech. Aerospace Ind. Mechatron. Manuf. Eng. 2007, 1, 354–359. [Google Scholar]
- Efe, M.Ö. Integral sliding mode control of a quadrotor with fractional order reaching dynamics. Trans. Inst. Meas. Control 2011, 33, 985–1003. [Google Scholar] [CrossRef]
- Zhao, L.; Dai, L.; Xia, Y.; Li, P. Attitude control for quadrotors subjected to wind disturbances via active disturbance rejection control and integral sliding mode control. Mech. Syst. Signal Process. 2019, 129, 531–545. [Google Scholar] [CrossRef]
- Zheng, E.H.; Xiong, J.J.; Luo, J.L. Second order sliding mode control for a quadrotor UAV. ISA Trans. 2014, 53, 1350–1356. [Google Scholar] [CrossRef] [PubMed]
- Muñoz, F.; González-Hernández, I.; Salazar, S.; Espinoza, E.S.; Lozano, R. Second order sliding mode controllers for altitude control of a quadrotor UAS: Real-time implementation in outdoor environments. Neurocomputing 2017, 233, 61–71. [Google Scholar] [CrossRef]
- Luque-Vega, L.; Castillo-Toledo, B.; Loukianov, A.G. Robust block second order sliding mode control for a quadrotor. J. Frankl. Inst. 2012, 349, 719–739. [Google Scholar] [CrossRef]
- Bouadi, H.; Cunha, S.S.; Drouin, A.; Mora-Camino, F. Adaptive sliding mode control for quadrotor attitude stabilization and altitude tracking. In Proceedings of the 2011 IEEE 12th International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 21–22 November 2011; pp. 449–455. [Google Scholar]
- Xiong, J.J.; Zhang, G.B. Global fast dynamic terminal sliding mode control for a quadrotor UAV. ISA Trans. 2017, 66, 233–240. [Google Scholar] [CrossRef]
- Sumantri, B.; Uchiyama, N.; Sano, S. Least square based sliding mode control for a quad-rotor helicopter and energy saving by chattering reduction. Mech. Syst. Signal Process. 2016, 66, 769–784. [Google Scholar] [CrossRef]
- Zhao, B.; Xian, B.; Zhang, Y.; Zhang, X. Nonlinear robust sliding mode control of a quadrotor unmanned aerial vehicle based on immersion and invariance method. Int. J. Robust Nonlinear Control 2015, 25, 3714–3731. [Google Scholar] [CrossRef]
- Li, S.; Li, B.; Geng, Q. Adaptive sliding mode control for quadrotor helicopters. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 71–76. [Google Scholar]
- González, I.; Salazar, S.; Lozano, R. Chattering-free sliding mode altitude control for a quad-rotor aircraft: Real-time application. J. Intell. Robot. Syst. 2014, 73, 137–155. [Google Scholar] [CrossRef]
- Izaguirre-Espinosa, C.; Muñoz-Vázquez, A.J.; Sánchez-Orta, A.; Parra-Vega, V.; Castillo, P. Attitude control of quadrotors based on fractional sliding modes: Theory and experiments. IET Control Theory Appl. 2016, 10, 825–832. [Google Scholar] [CrossRef]
- Tanveer, M.H.; Hazry, D.; Ahmed, S.F.; Joyo, M.K.; Warsi, F.A.; Kamaruddin, H.; Razlan, Z.M.; Wan, K.; Shahriman, A. NMPC-PID based control structure design for avoiding uncertainties in attitude and altitude tracking control of quad-rotor (UAV). In Proceedings of the 2014 IEEE 10th International Colloquium on Signal Processing and Its Applications, Kuala Lumpur, Malaysia, 7–9 March 2014; pp. 117–122. [Google Scholar]
- Mousavi, M.A.; Heshmati, Z.; Moshiri, B. LTV-MPC based path planning of an autonomous vehicle via convex optimization. In Proceedings of the 2013 21st Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 14–16 May 2013; pp. 1–7. [Google Scholar]
- Diwu, P.J.; Yang, S.X. MPC/SMC Control for a Quadrotor’s Trajectory Tracking. Trans. Beijing Inst. Technol. 2013, 33, 505–509. [Google Scholar]
- Aswani, A.; Bouffard, P.; Tomlin, C. Extensions of learning-based model predictive control for real-time application to a quadrotor helicopter. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 4661–4666. [Google Scholar]
- Cao, G.; Lai, E.M.K.; Alam, F. Gaussian process model predictive control of an unmanned quadrotor. J. Intell. Robot. Syst. 2017, 88, 147–162. [Google Scholar] [CrossRef] [Green Version]
- Alexis, K.; Papachristos, C.; Siegwart, R.; Tzes, A. Robust model predictive flight control of unmanned rotorcrafts. J. Intell. Robot. Syst. 2016, 81, 443–469. [Google Scholar] [CrossRef]
- Mueller, M.W.; D’Andrea, R. A model predictive controller for quadrocopter state interception. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 1383–1389. [Google Scholar]
- Liu, C.; Chen, W.H.; Andrews, J. Tracking control of small-scale helicopters using explicit nonlinear MPC augmented with disturbance observers. Control Eng. Pract. 2012, 20, 258–268. [Google Scholar] [CrossRef] [Green Version]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Switching model predictive attitude control for a quadrotor helicopter subject to atmospheric disturbances. Control Eng. Pract. 2011, 19, 1195–1207. [Google Scholar] [CrossRef] [Green Version]
- Abdolhosseini, M.; Zhang, Y.; Rabbath, C.A. An efficient model predictive control scheme for an unmanned quadrotor helicopter. J. Intell. Robot. Syst. 2013, 70, 27–38. [Google Scholar] [CrossRef]
- Chen, X.; Wang, L. Cascaded model predictive control of a quadrotor UAV. In Proceedings of the 2013 Australian Control Conference, Fremantle, WA, Australia, 4–5 November 2013; pp. 354–359. [Google Scholar]
- Bemporad, A.; Rocchi, C. Decentralized hybrid model predictive control of a formation of unmanned aerial vehicles. IFAC Proc. Vol. 2011, 44, 11900–11906. [Google Scholar] [CrossRef] [Green Version]
- Ru, P.; Subbarao, K. Nonlinear model predictive control for unmanned aerial vehicles. Aerospace 2017, 4, 31. [Google Scholar] [CrossRef]
- Novák, J.; Chalupa, P. Implementation aspects of embedded MPC with fast gradient method. Int. J. Circuits, Syst. Signal Process. 2014, 8, 504–511. [Google Scholar]
- Greatwood, C.; Richards, A.G. Reinforcement learning and model predictive control for robust embedded quadrotor guidance and control. Auton. Robot. 2019, 43, 1681–1693. [Google Scholar] [CrossRef] [Green Version]
- Egardt, B. Stability of Adaptive Controllers; Springer: Berlin/Heidelberg, Germany, 1979; Volume 20. [Google Scholar]
- Nicol, C.; Macnab, C.; Ramirez-Serrano, A. Robust adaptive control of a quadrotor helicopter. Mechatronics 2011, 21, 927–938. [Google Scholar] [CrossRef]
- Narendra, K.; Annaswamy, A. A new adaptive law for robust adaptation without persistent excitation. IEEE Trans. Autom. Control 1987, 32, 134–145. [Google Scholar] [CrossRef]
- Michini, B.; How, J. L1 adaptive control for indoor autonomous vehicles: Design process and flight testing. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 5754. [Google Scholar]
- De Monte, P.; Lohmann, B. Position trajectory tracking of a quadrotor helicopter based on L1 adaptive control. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 3346–3353. [Google Scholar]
- Zuo, Z. Adaptive trajectory tracking control design with command filtered compensation for a quadrotor. J. Vib. Control 2013, 19, 94–108. [Google Scholar] [CrossRef]
- Selfridge, J.M.; Tao, G. A multivariable adaptive controller for a quadrotor with guaranteed matching conditions. Syst. Sci. Control Eng. Open Access J. 2014, 2, 24–33. [Google Scholar] [CrossRef]
- Kun, D.W.; Hwang, I. Linear matrix inequality-based nonlinear adaptive robust control of quadrotor. J. Guid. Control Dyn. 2016, 39, 996–1008. [Google Scholar] [CrossRef]
- Erginer, B.; Altuğ, E. Design and implementation of a hybrid fuzzy logic controller for a quadrotor VTOL vehicle. Int. J. Control Autom. Syst. 2012, 10, 61–70. [Google Scholar] [CrossRef]
- Zareb, M.; Ayad, R.; Nouibat, W. Fuzzy-PID hybrid control system to navigate an autonomous mini-Quadrotor. In Proceedings of the 3rd International Conference on Systems and Control, Algiers, Algeria, 29–31 October 2013; pp. 906–913. [Google Scholar]
- Zeghlache, S.; Saigaa, D.; Kara, K.; Harrag, A.; Bouguerra, A. Fuzzy sliding mode control with chattering elimination for a quadrotor helicopter in vertical flight. In Proceedings of the International Conference on Hybrid Artificial Intelligence Systems; Springer: Berlin/Heidelberg, Germany, 2012; pp. 125–136. [Google Scholar]
- Al-Younes, Y.; Jarrah, M. Attitude stabilization of quadrotor UAV using backstepping fuzzy logic & backstepping least-mean-square controllers. In Proceedings of the 2008 5th International Symposium on Mechatronics and Its Applications, Amman, Jordan, 27–29 May 2008; pp. 1–11. [Google Scholar]
- Bhatkhande, P.; Havens, T.C. Real time fuzzy controller for quadrotor stability control. In Proceedings of the 2014 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Beijing, China, 6–11 July 2014; pp. 913–919. [Google Scholar]
- Chen, X.; Li, D.; Bai, Y.; Xu, Z. Modeling and neuro-fuzzy adaptive attitude control for eight-Rotor MAV. Int. J. Control Autom. Syst. 2011, 9, 1154–1163. [Google Scholar] [CrossRef]
- Chen, X.J.; Li, D.; Bai, Y.; Xu, Z.J. Application of type-II fuzzy neural network to adaptive double axis motion control system. Opt. Precis. Eng. 2011, 19, 1643–1650. [Google Scholar] [CrossRef]
- Sheikhpour, S.; Shouraki, S.B. A model-based fuzzy controller using the parallel distributed compensation method for quadrotor attitude stabilization. In Proceedings of the 2013 21st Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 14–16 May 2013; pp. 1–6. [Google Scholar]
- Wahyunggoro, O.; Cahyadi, A.I. Quadrotor Path Planning Based On Modified Fuzzy Cell Decomposition Algorithm. Telkomnika 2016, 14, 655–664. [Google Scholar]
- Torres, F.; Rabhi, A.; Lara, D.; Romero, G.; Pégard, C. Fuzzy state feedback for attitude stabilization of quadrotor. Int. J. Adv. Robot. Syst. 2016, 13, 2. [Google Scholar] [CrossRef] [Green Version]
- Szlachetko, B.; Lower, M. On quadrotor navigation using fuzzy logic regulators. In Proceedings of the International Conference on Computational Collective Intelligence; Springer: Berlin/Heidelberg, Germany, 2012; pp. 210–219. [Google Scholar]
- Nemes, A. Fuzzy-Genetic Control of Quadrotors Unmanned Aerial Vehicles. Interdiscip. Descr. Complex Syst. INDECS 2016, 14, 223–235. [Google Scholar] [CrossRef] [Green Version]
- Pazooki, M.; Mazinan, A. Hybrid fuzzy-based sliding-mode control approach, optimized by genetic algorithm for quadrotor unmanned aerial vehicles. Complex Intell. Syst. 2018, 4, 79–93. [Google Scholar] [CrossRef] [Green Version]
- Efe, M.Ö. Neural Network Assisted Computationally Simple PIλDμ Control of a Quadrotor UAV. IEEE Trans. Ind. Inform. 2011, 7, 354–361. [Google Scholar] [CrossRef]
- Zhao, D.; Sun, C.; Wang, Q.; Yang, W. Neural network based PID control for quadrotor aircraft. In Proceedings of the International Conference on Intelligent Science and Big Data Engineering; Springer: Berlin/Heidelberg, Germany, 2015; pp. 287–297. [Google Scholar]
- Boudjedir, H.; Yacef, F.; Bouhali, O.; Rizoug, N. Adaptive neural network for a quadrotor unmanned aerial vehicle. Int. J. Found. Comput. Sci. Technol. 2012, 2, 1–13. [Google Scholar] [CrossRef]
- Das, A.; Lewis, F.; Subbarao, K. Dynamic Neural Network-Based Robust Backstepping Control approach for Quadrotors. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008; p. 6780. [Google Scholar]
- Shirzadeh, M.; Asl, H.J.; Amirkhani, A.; Jalali, A.A. Vision-based control of a quadrotor utilizing artificial neural networks for tracking of moving targets. Eng. Appl. Artif. Intell. 2017, 58, 34–48. [Google Scholar] [CrossRef]
- Bouhali, O.; Boudjedir, H. Neural network control with neuro-sliding mode observer applied to quadrotor helicopter. In Proceedings of the 2011 International Symposium on Innovations in Intelligent Systems and Applications, Istanbul, Turkey, 15–18 June 2011; pp. 24–28. [Google Scholar]
- Boudjedir, H.; Bouhali, O.; Rizoug, N. Neural network control based on adaptive observer for quadrotor helicopter. Int. J. Inf. Technol. Control Autom. 2012, 2, 39–54. [Google Scholar] [CrossRef] [Green Version]
- Kim, B.S.; Calise, A.J. Nonlinear flight control using neural networks. J. Guid. Control Dyn. 1997, 20, 26–33. [Google Scholar] [CrossRef]
- Wu, J.; Peng, H.; Chen, Q.; Peng, X. Modeling and control approach to a distinctive quadrotor helicopter. ISA Trans. 2014, 53, 173–185. [Google Scholar] [CrossRef]
- Amir, M.Y.; Abbas, V. Modeling and neural control of quad rotor helicopter. Yanbu J. Eng. Sci. 2011, 2, 35–49. [Google Scholar]
- Shirzadeh, M.; Amirkhani, A.; Jalali, A.; Mosavi, M.R. An indirect adaptive neural control of a visual-based quadrotor robot for pursuing a moving target. ISA Trans. 2015, 59, 290–302. [Google Scholar] [CrossRef]
- Mohajerin, N.; Waslander, S.L. Modelling a quadrotor vehicle using a modular deep recurrent neural network. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics, Hong Kong, China, 9–12 October 2015; pp. 376–381. [Google Scholar]
- Shastry, A.K.; Pattanaik, A.; Kothari, M. Neuro-adaptive augmented dynamic inversion controller for quadrotors. IFAC-PapersOnLine 2016, 49, 302–307. [Google Scholar] [CrossRef]
- Lin, Q.; Cai, Z.; Wang, Y.; Yang, J.; Chen, L. Adaptive flight control design for quadrotor UAV based on dynamic inversion and neural networks. In Proceedings of the 2013 Third International Conference on Instrumentation, Measurement, Computer, Communication and Control, Shenyang, China, 21–23 September 2013; pp. 1461–1466. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controllers | Advantages | Disadvantages |
|---|---|---|
| PID | Easy to choose gain; Can overcome steady-state error. | Cannot handle constraints, noise and disturbance; Cannot deal with multiple inputs and outputs at the same time. |
| LQR | Can deal with multiple inputs and outputs. | Sometimes fails to overcome steady-state error. |
| H∞ | Well performed when system is multivariable with cross-coupling among channels. | Requires well-designed model. |
| Feedback Linearization | Systemactic model framework; Well-performed when linear and nonlinear models are almost similar. | Incapability of constraints handling and model uncertainities, poor robustness. |
| Backstepping | Systematic and recursive designed; Precisely designed model is not required; Can handle nonlinearities to the system; Can overcome mismatched perturbations and ensures stability. | Over-parameterization; Difficult to choose proper parameters. |
| SMC | Well-performed in high-nonlinearity; Less sensitivity in disturbances and model uncertainities. | Chattering problem sometimes create system instability. |
| MPC | Predicts future behavior of the states; Deals with multiple inputs and outputs at the same time; can handle constraints at inputs and outputs; Can overcome noise and disturbances. | Slow in tracking. |
| Adaptive | Very effective when parameters are unknown, dynamic and disturbance model changes continuously; Engineering efficiency is comparatively satisfactory. | Takes time to adapt with the parameters. |
| Fuzzy Logic | Offers effective solution of a complex, ill-defined and uncertain model; Does not require accurate model. | Difficult to design control rule and system analysis; Takes linger time for parameter tuning; Approximation error; Presence of unkown nonlinear function. |
| Neural Network | Model free; Excellent in parallel distributed processing, learning and adaptation; Provide robustness to the system. | Requires ample of data for learning; Poor system stability. |
| Controllers | Controller Hybridization | Improvement of Existing Controller |
|---|---|---|
| PID | H∞ [134], fuzzy [135,136,137], neural network [138,139,140,141], feedback linearization [142,143], backstepping [63,144,145,146], SMC [80,147,148]. | Nonlinear PID [149,150,151,152,153], cascaded PID [154,155], gradient optimization based PID [156,157], particle swarm optimization PID [158], self-tuning PID [29,159], genetic algorithm based PID [160,161], fractional PID [162], online iterative learning [163]. |
| LQR | PID [41,41], adaptive control [103,164], feedback linearization [165], backstepping [166], SMC [167], fuzzy [168], neural network [169]. | Full-order state observer [33], discrete LQT [170], LQR with filter [24,171,172,173,174], optimal trajectory planner [175], distributed LQR [176], optimization [177], extended LQR [178]. |
| H∞ | MPC [50], PID [49,179], LQR [45]. | Requires well-designed model. |
| Gain Scheduling | PID [52,53,54,55,56], LQR [57], SMC [58,59] | |
| Feedback Linearization | H∞ [180], LQR [165], adaptive [181,182], backstepping [71], SMC [94]. | Sliding mode observer [183], dynamic extension [184], recursive Bayesian filter [185], disturbance observer [186,187], lie derivative [188], block control algorithm [189], sliding mode compensator [190]. |
| Backstepping | Neural network [191,192], feedback linearization [144], sliding mode control [72,193,194,195,196,197,198,199], fuzzy logic [200], fuzzy and SMC [201], PID [202,203,204]. | Integral with sliding mode [198,199], integrator [205,206], Frenet-Serret Theory—FST [145], nonlinear disturbance observer [207], EKF [208,209], command filter [210,211], command and auxiliary filter [211], robust adaptive function [212], particle swarm optimization [77,213], extended state observer [214], Nussbaum compensator [215], state transformation approach [216], time-variation formulation [217]. |
| SMC | PD [218,219], backstepping [72], feedback linearization [220], adaptive and backstepping [221]. | Observer [222,223], integral [224,225], second order SMC [226,227], block control approach [228], adaptive control law [229], global fast dynamic terminal [230], fuzzy logic with gain switching [54], least square method [231], immersion and invariance method [232], adaptive control law [233], chattering elimination function [234], fractional order [235]. |
| MPC | PID [236], LQR [237], H∞ [46], SMC [238]. | EKF [239], Gaussian Process model [240], Minimax optimization [241], convex optimization [242], disturbance observer [243] etc. or techniques such as piecewise affine [86,244], model reduction [245], cascade feature [246], two layer approach [247], state-dependent coefficient representation [248], Fast Gradient method [249], Reinforcement learning [250]. |
| Adaptive | Neural network [91,92,93], SMC [94,95,96], fuzzy control [97], backstepping [98,99,100,101], gain-scheduling [102], LQR [103]. | Deadzone [251,252], parameter projection [251,252], e-modification [253], cerebellar algorithm [91,252], L1 [110,254,255], command filtered compensation [256], simpler state feedback [257], linear matrix inequality [258]. |
| Fuzzy Logic | PID [22,135,259,260], SMC [58,201,261], backstepping [126,262], neural network [263,264,265], LQR [266]. | Cell decomposition [267], parallel distributed compensation [266,268], cascade [269], genetic algorithm [270,271], EKF [266]. |
| Neural Network | PID [99,272,273], adaptive [91,99,274], backstepping [99,275], vision based control [276], fuzzy [265]. | Neural observer [93], neuro sliding mode observer [277], high gain observer [278], online [279] and offline [130] learning, Nonlinear Auto Regressive eXogenous input (NARX) model [280], backpropagation [273,281], Radial Basis Function [282], Modular Deep Recurrent [283], direct inverse control [90,139], dynamic inversion [284,285]. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roy, R.; Islam, M.; Sadman, N.; Mahmud, M.A.P.; Gupta, K.D.; Ahsan, M.M. A Review on Comparative Remarks, Performance Evaluation and Improvement Strategies of Quadrotor Controllers. Technologies 2021, 9, 37. https://0-doi-org.brum.beds.ac.uk/10.3390/technologies9020037
Roy R, Islam M, Sadman N, Mahmud MAP, Gupta KD, Ahsan MM. A Review on Comparative Remarks, Performance Evaluation and Improvement Strategies of Quadrotor Controllers. Technologies. 2021; 9(2):37. https://0-doi-org.brum.beds.ac.uk/10.3390/technologies9020037
Chicago/Turabian StyleRoy, Rupal, Maidul Islam, Nafiz Sadman, M. A. Parvez Mahmud, Kishor Datta Gupta, and Md Manjurul Ahsan. 2021. "A Review on Comparative Remarks, Performance Evaluation and Improvement Strategies of Quadrotor Controllers" Technologies 9, no. 2: 37. https://0-doi-org.brum.beds.ac.uk/10.3390/technologies9020037