
Infrared Small Target Detection Based on Partial Sum Minimization and Total Variation

 , , , and
, , , and
Abstract
:1. Introduction
- An ISTD method called TV-PSMSV has been introduced in which a TV term was inducted to the BPI model to obtain more detailed features in the scene. Moreover, the PSMSV was adopted to limit BPI.
- The suggested TV-PSMSV model used an ADMM-based method to address image transformation optimization.
2. Materials and Methods
2.1. Total Variation (TV)
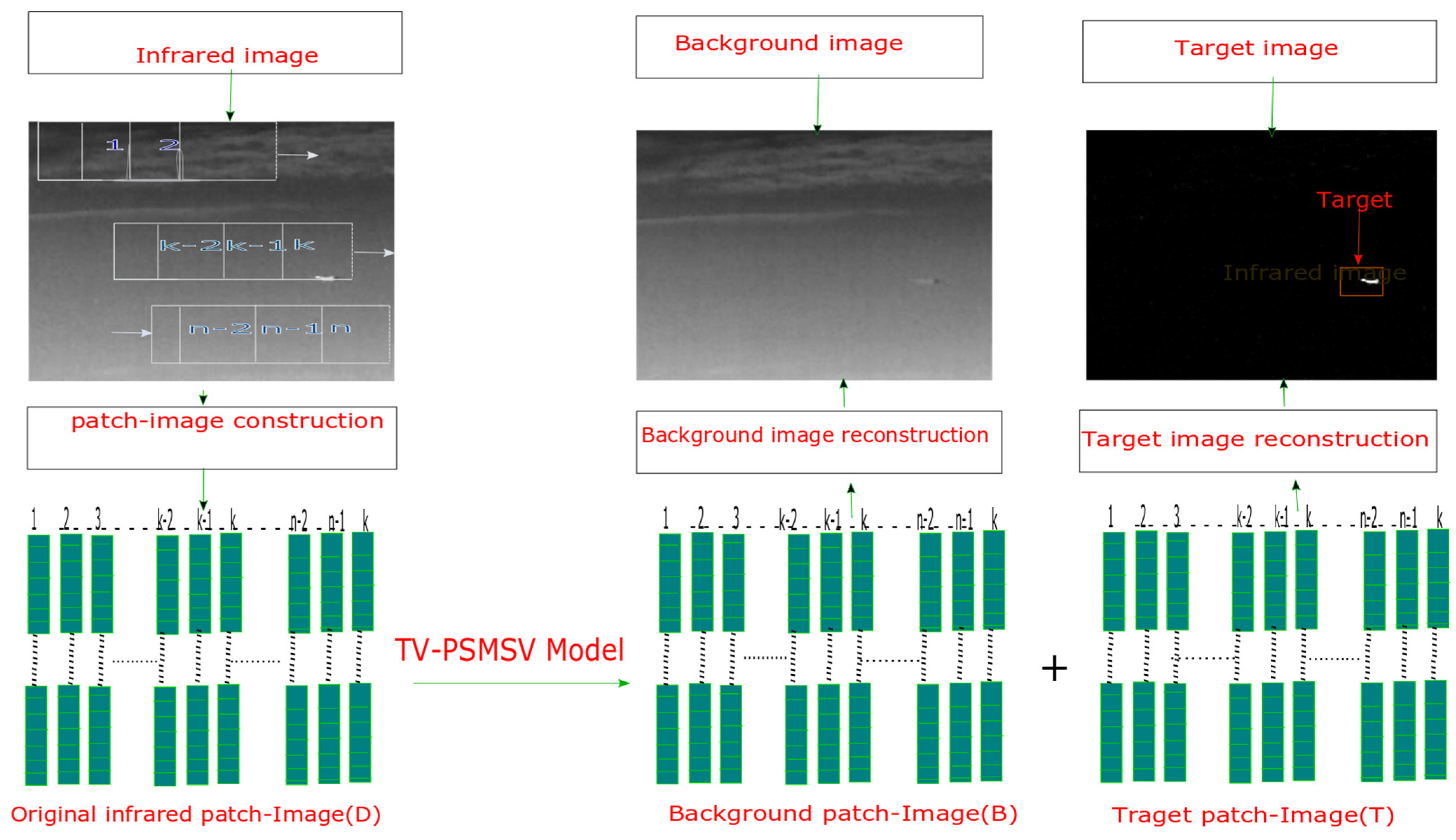
2.2. TV-PSMSV Model
2.2.1. Background Patch Image (BPI)
2.2.2. Target Patch-Image (TPI)
2.2.3. Noise Patch-Image (NPI)
2.3. Mathematical Solution of the PSMSV-TV Model Using ADMM
2.4. Modelling for Small Target Extraction from Background Image
- A:
- Creation of patch image from Input:
- B:
- Target background separation:
- C:
- Regeneration of the target and background image:
- D:
- Segmentation process:
| Algorithm 1: The PSMSV-TV Method. |
| Input: Input is the original IPI ,tol Output:
|
3. Experimental Result Analysis
3.1. Dataset Preparation
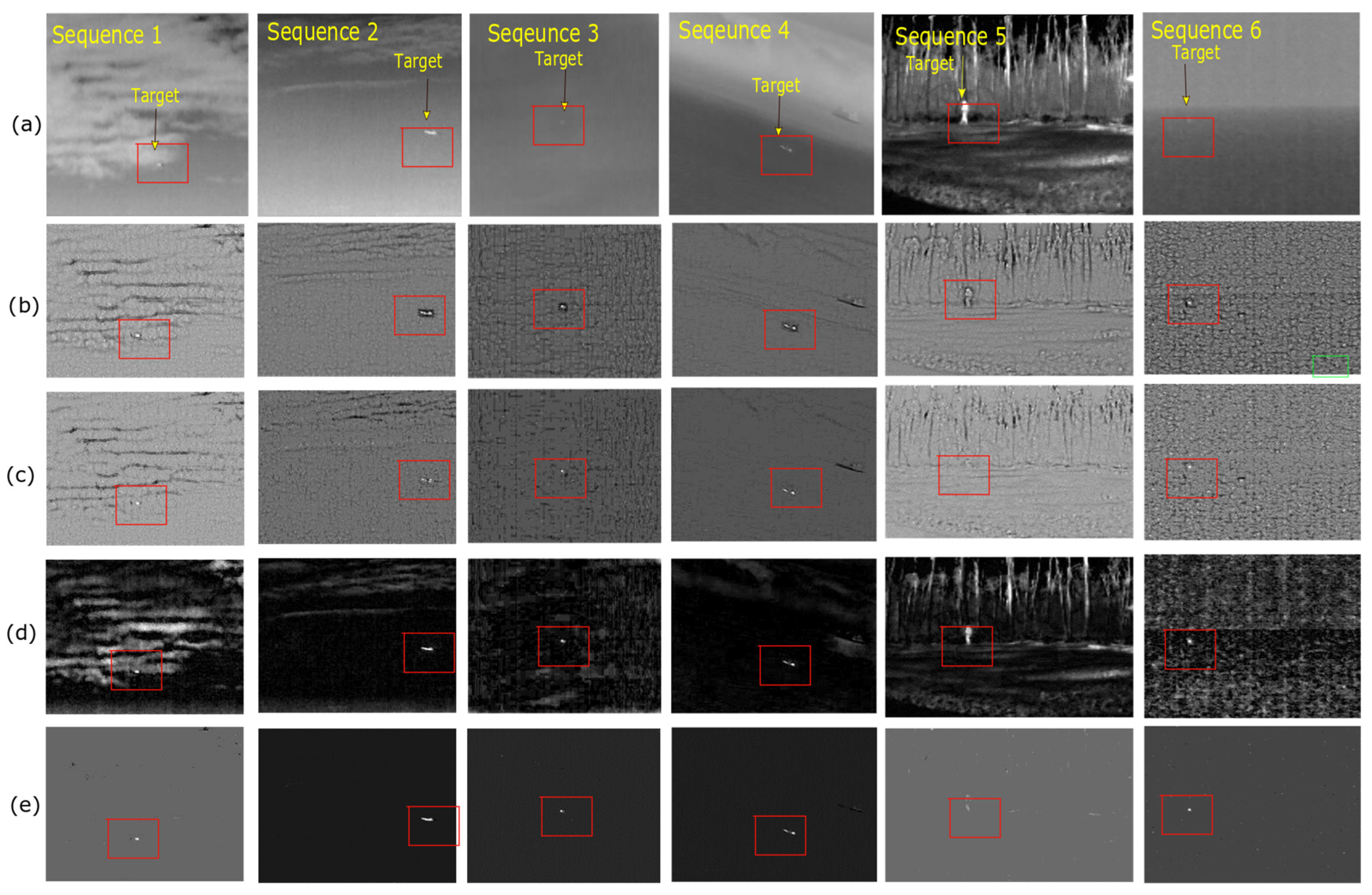
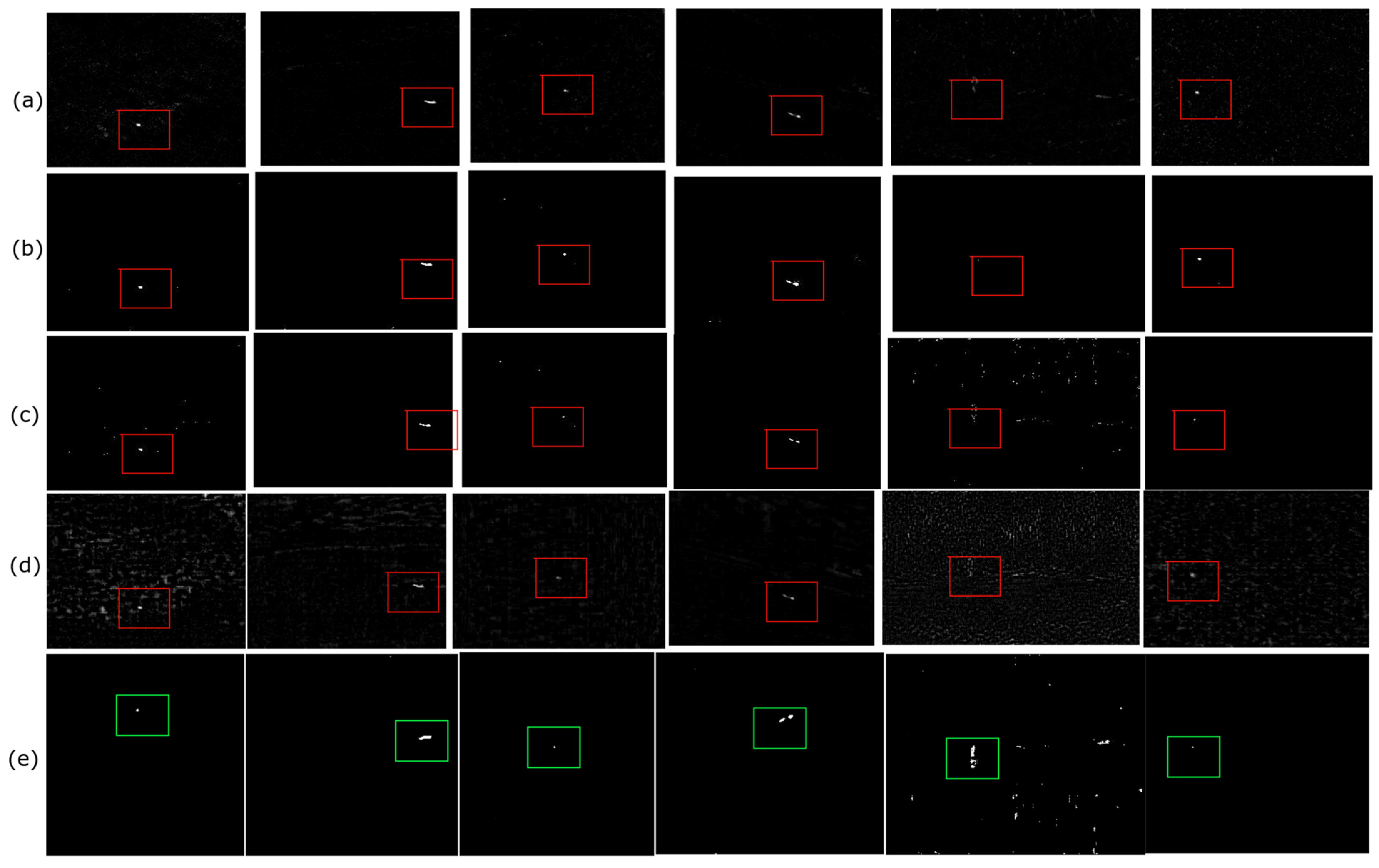
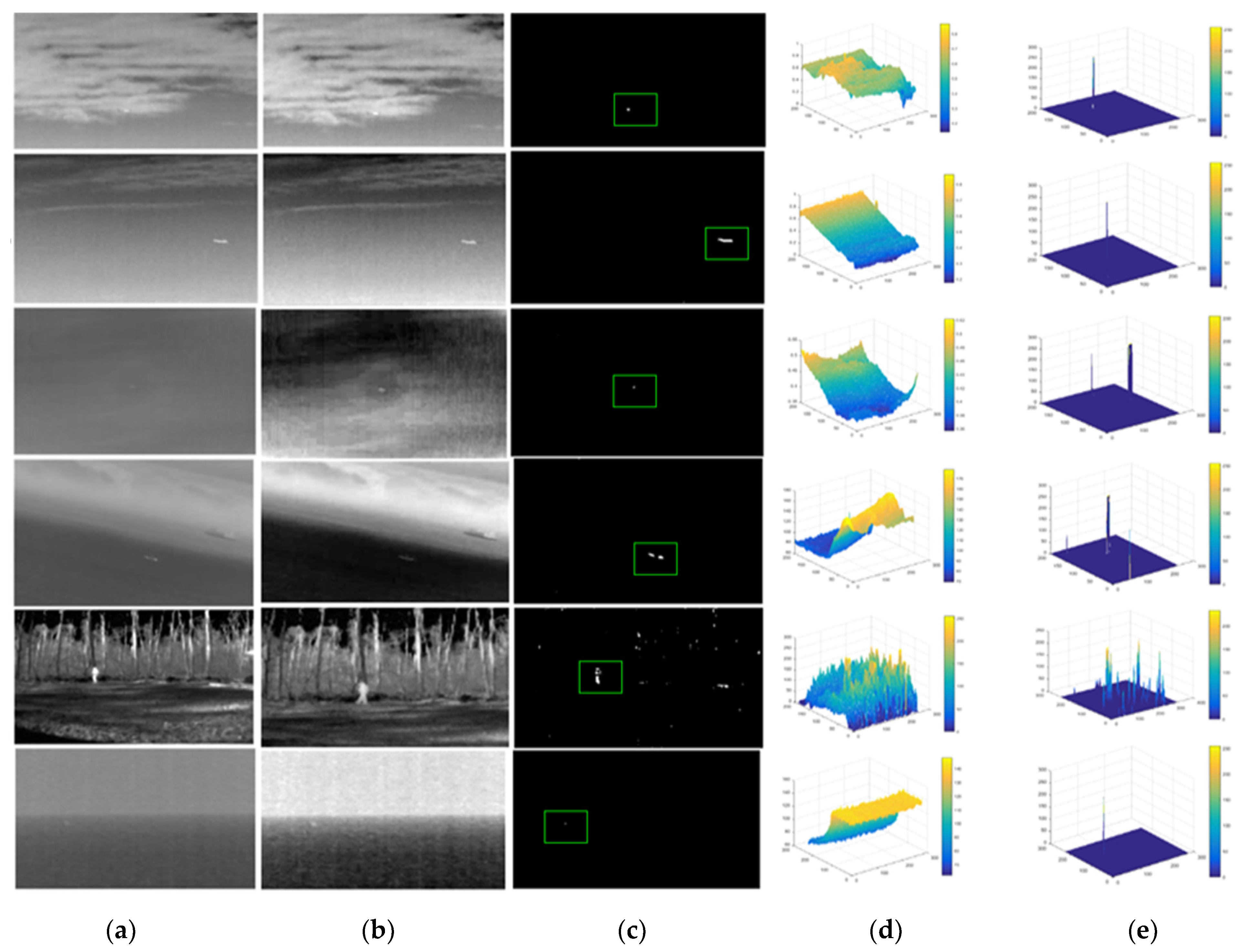
3.2. Experimental Evaluation Using Real Image Sequence
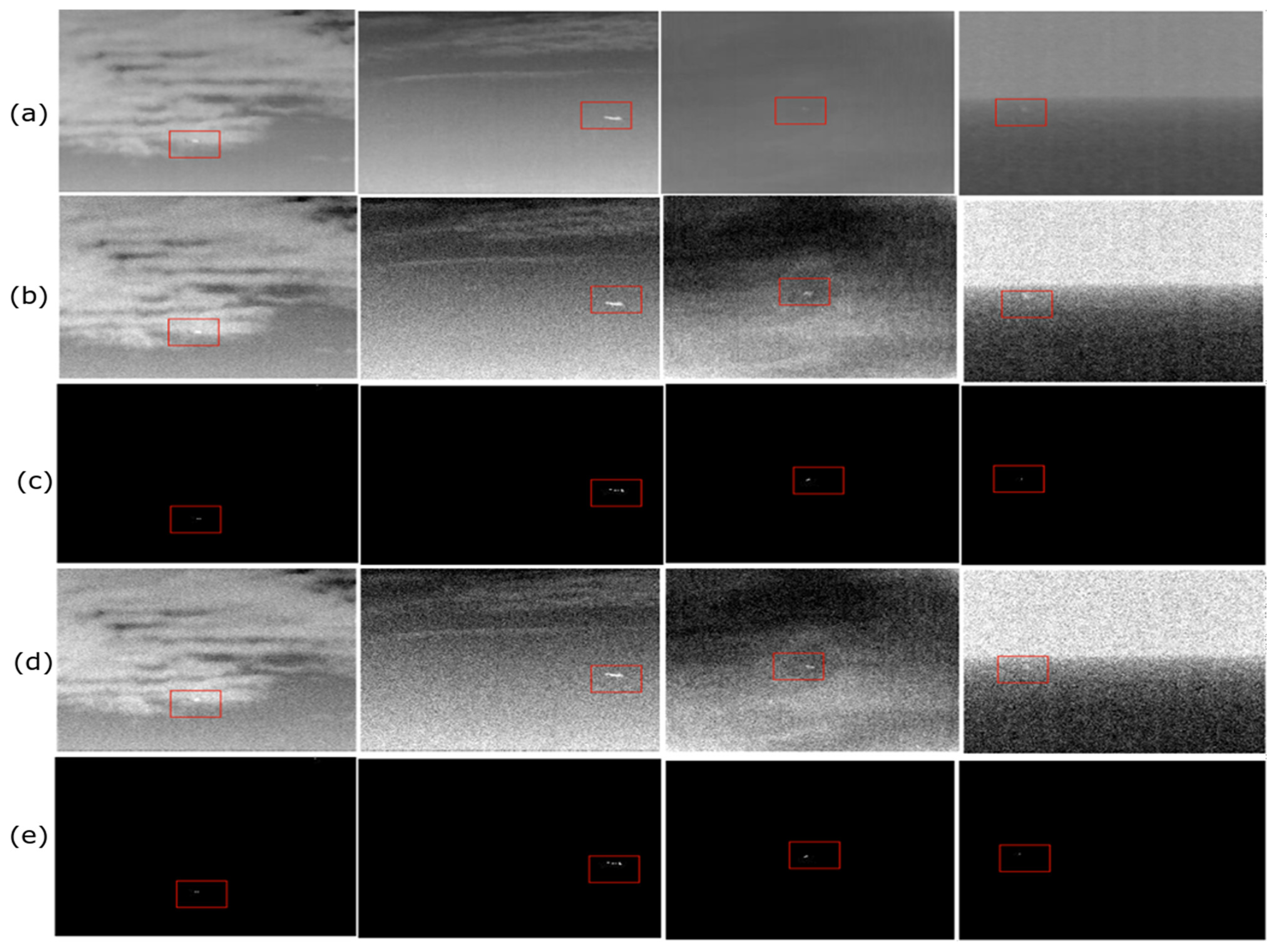
3.2.1. Evaluation of Background Suppression of Images Sequences
3.2.2. Evaluation of Background Suppression for Noisy Images Sequences
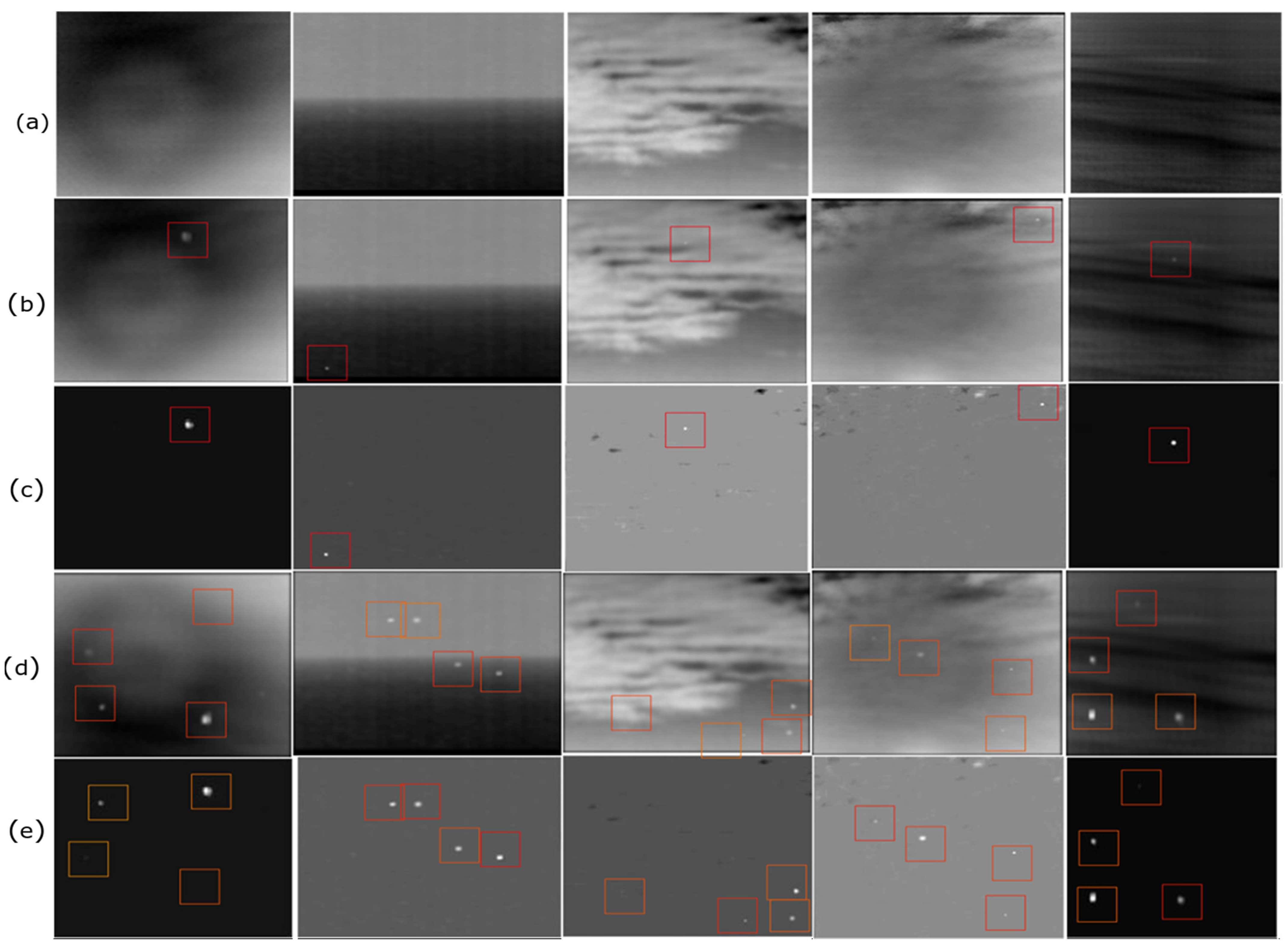
3.2.3. Experimental Evaluation on a Synthetic Image Sequences
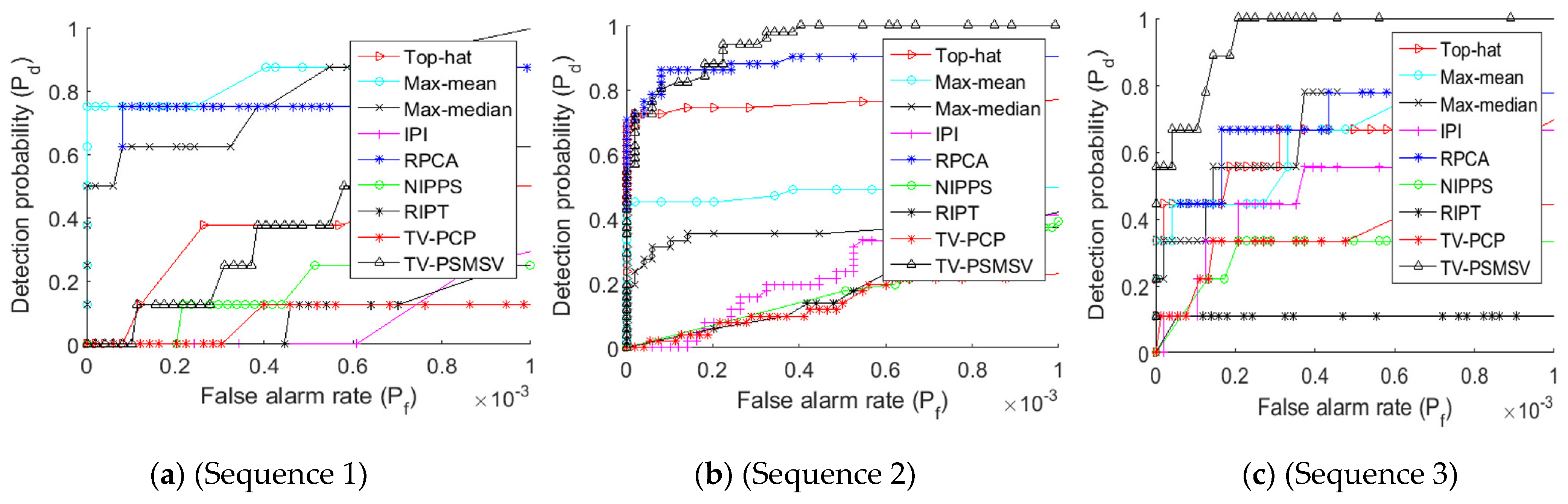
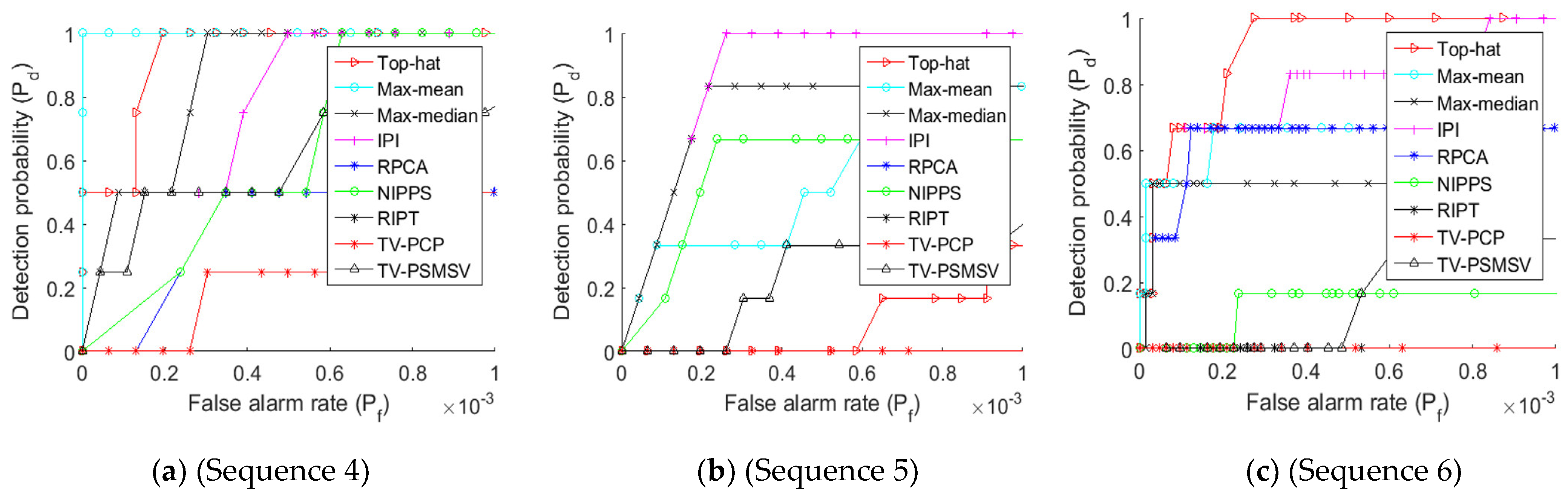
3.3. Evaluation Metrics Indicators
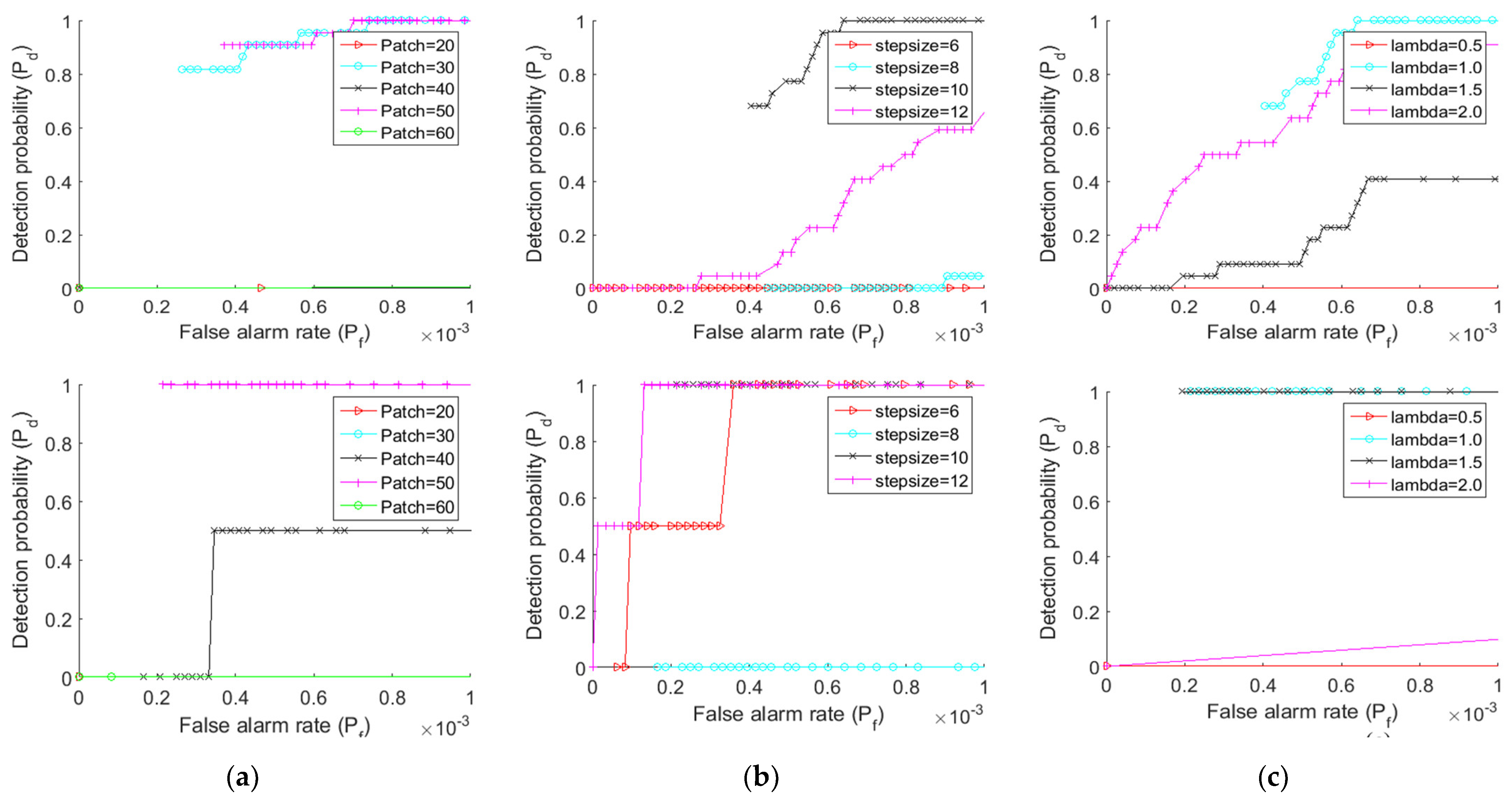
3.4. Parameter Analysis
3.4.1. Image Patch-Size
3.4.2. Step-Size
3.4.3. Controlling Parameter
3.4.4. Computational or Running Complexity
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A.G. Infrared Patch-Image Model for Small Target Detection in a Single Image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.L.P.; Li, H.; Wei, Y.; Xia, T.; Tang, Y.Y. A Local Contrast Method for Small Infrared Target Detection. IEEE Trans. Geosci. Remote Sens. 2014, 52, 574–581. [Google Scholar] [CrossRef]
- Reed, I.S.; Gagliardi, R.M.; Stotts, L.B. Optical moving target detection with 3-D matched filtering. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 327–336. [Google Scholar] [CrossRef]
- Rawat, S.; Verma, S.K.; Kumar, Y. Review on recent development in infrared small target detection algorithms. Procedia Comput. Sci. 2020, 167, 2496–2505. [Google Scholar] [CrossRef]
- Bae, T.-W.; Kim, Y.-C.; Ahn, S.-H.; Sohng, K.-I. A novel Two-Dimensional LMS (TDLMS) using sub-sampling mask and step-size index for small target detection. IEICE Electron. Express 2010, 7, 112–117. [Google Scholar] [CrossRef] [Green Version]
- Deshpande, S.D.; Er, M.H.; Venkateswarlu, R.; Chan, P. Max-mean and max-median filters for detection of small targets. In Signal and Data Processing of Small Targets; SPIE: Denver, CO, USA, 1999; Volume 3809, pp. 74–84. [Google Scholar] [CrossRef]
- Rawat, S.; Verma, S.K.; Kumar, Y. Infrared small target detection based on Non-convexTriple Tensor Factorization. IET Image Process. 2021, 15, 556–570. [Google Scholar] [CrossRef]
- Itti, L.; Koch, C.; Niebur, E. A model of saliency-based visual attention for rapid scene analysis. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 1254–1259. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Liu, F.; Sharma, A.; Khalaf, O.I.; Alotaibi, Y.; Alsufyani, A.; Alghamdi, S. Research on the Natural Language Recognition Method Based on Cluster Analysis Using Neural Network. Math. Probl. Eng. 2021, 9982305. [Google Scholar] [CrossRef]
- Alotaibi, Y. A New Database Intrusion Detection Approach Based on Hybrid Meta-heuristics. Comput. Mater. Contin. 2021, 66, 1879–1895. [Google Scholar] [CrossRef]
- Suryanarayana, G.; Chandran, K.; Khalaf, O.I.; Alotaibi, Y.; Alsufyani, A.; Alghamdi, S.A. Accurate Magnetic Resonance Image Super-Resolution Using Deep Networks and Gaussian Filtering in the Stationary Wavelet Domain. IEEE Access 2021, 9, 71406–71417. [Google Scholar] [CrossRef]
- Hu, T.; Zhao, J.J.; Cao, Y.; Wang, F.L.; Yang, J. Infrared small target detection based on saliency and principle component analysis. J. Infrared Millim. Waves 2010, 29, 303–306. [Google Scholar]
- Gao, C.; Su, H.; Li, L.; Li, Q.; Huang, S. Small infrared target detection based on kernel principal component analysis. In Proceedings of the 2012 5th International Congress on Image and Signal Processing, Chongqing, China, 16–18 October 2012; pp. 1335–1339. [Google Scholar]
- Wang, X.; Shen, S.; Ning, C.; Xu, M.; Yan, X. A sparse representation-based method for infrared dim target detection under sea--sky background. Infrared Phys. Technol. 2015, 71, 347–355. [Google Scholar] [CrossRef]
- Wang, C.; Qin, S. Adaptive detection method of infrared small target based on target-background separation via robust principal component analysis. Infrared Phys. Technol. 2015, 69, 123–135. [Google Scholar] [CrossRef]
- He, Y.; Li, M.; Zhang, J.; An, Q. Small infrared target detection based on low-rank and sparse representation. Infrared Phys. Technol. 2015, 68, 98–109. [Google Scholar] [CrossRef]
- Zhang, Z.; Ren, J.; Li, S.; Hong, R.; Zha, Z.; Wang, M. Robust Subspace Discovery by Block-diagonal Adaptive Locality-constrained Representation. In Proceedings of the 27th ACM International Conference on Multimedia, Association for Computing Machinery (ACM), Nice, France, 21–25 October 2019; pp. 1569–1577. [Google Scholar]
- Dai, Y.; Wu, Y.; Song, Y. Infrared small target and background separation via column-wise weighted robust principal component analysis. Infrared Phys. Technol. 2016, 77, 421–430. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y.; Song, Y.; Gao, J. Non-negative infrared patch-image model: Robust target-background separation via partial sum minimization of singular values. Infrared Phys. Technol. 2017, 81, 182–194. [Google Scholar] [CrossRef]
- Guo, J.; Wu, Y.; Dai, Y. Small target detection based on reweighted infrared patch--image model. IET Image Process. 2017, 12, 70–79. [Google Scholar] [CrossRef]
- Gu, S.; Xie, Q.; Meng, D.; Zuo, W.; Feng, X.; Zhang, L. Weighted Nuclear Norm Minimization and Its Applications to Low Level Vision. Int. J. Comput. Vis. 2017, 121, 183–208. [Google Scholar] [CrossRef]
- Zhang, L.; Li, M.; Qiu, X.; Zhu, Y. Infrared Small Target Detection Based on Four-Direction Overlapping Group Sparse Total Variation. Trait. Signal 2020, 37, 367–377. [Google Scholar] [CrossRef]
- Wang, X.; Zhenming, P.; Dehui, K.; Zhang, P.; He, Y. Infrared dim target detection based on total variation regularization and principal component pursuit. Image Vis. Comput. 2017, 63, 1–9. [Google Scholar] [CrossRef]
- Rawat, S.; Verma, S.K.; Kumar, Y. Reweighted infrared patch image model for small target detection based on non-convex p-norm minimisation and TV regularization. IET Image Process. 2020, 14, 1937–1947. [Google Scholar] [CrossRef]
- Wan, M.; Gu, G.; Xu, Y.; Qian, W.; Ren, K.; Chen, Q. Total Variation-Based Interframe Infrared Patch-Image Model for Small Target Detection. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y. Reweighted Infrared Patch-Tensor Model with Both Nonlocal and Local Priors for Single-Frame Small Target Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3752–3767. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Peng, L.; Zhang, T.; Cao, S.; Peng, Z. Infrared small target detection via non-convex rank approximation minimization joint l2,1 norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Peng, Z. Infrared Small Target Detection Based on Partial Sum of the Tensor Nuclear Norm. Remote Sens. 2019, 11, 382. [Google Scholar] [CrossRef] [Green Version]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear total variation based noise removal algorithms. Phys. D Nonlinear Phenom. 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Chen, G.; Zhang, J.; Li, D.; Chen, H. Robust Kronecker product video denoising based on fractional-order total variation model. Signal Process. 2016, 119, 1–20. [Google Scholar] [CrossRef]
- Oh, T.-H.; Tai, Y.-W.; Bazin, J.-C.; Kim, H.; Kweon, I.S. Partial Sum Minimization of Singular Values in Robust PCA: Algorithm and Applications. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 744–758. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Li, H.; Ling, Q.; Li, W. Robust Temporal-Spatial Decomposition and Its Applications in Video Processing. IEEE Trans. Circuits Syst. Video Technol. 2013, 23, 387–400. [Google Scholar] [CrossRef]
- Donoho, D.L.; Johnstone, I.M. Adapting to Unknown Smoothness via Wavelet Shrinkage. J. Am. Stat. Assoc. 1995, 90, 1200. [Google Scholar] [CrossRef]
- Hale, E.T.; Yin, W.; Zhang, Y. Fixed-Point Continuation for ℓ1ℓ1-Minimization: Methodology and Convergence. SIAM J. Optim. 2008, 19, 1107–1130. [Google Scholar] [CrossRef]
- Li, C. An Efficient Algorithm for Total Variation Regularization with Applications to the Single Pixel Camera and Compressive Sensing; Rice University: Houston, TX, USA, 2010. [Google Scholar]
- Lin, Z.; Chen, M.; Ma, Y. The augmented Lagrange multiplier method for exact recovery of corrupted low-rank matrices. arXiv 2010, arXiv:1009.5055. [Google Scholar]
- Bai, X.; Zhou, F. Analysis of new top-hat transformation and the application for infrared dim small target detection. Pattern Recognit. 2010, 43, 2145–2156. [Google Scholar] [CrossRef]
- Hilliard, C.I. Selection of a clutter rejection algorithm for real-time target detection from an airborne platform. In Proceedings of the SPIE Proceedings, Orlando, FL, USA, 13 July 2000; Volume 4048, pp. 74–84. [Google Scholar]
- Gu, Y.; Wang, C.; Liu, B.; Zhang, Y. A Kernel-Based Nonparametric Regression Method for Clutter Removal in Infrared Small-Target Detection Applications. IEEE Geosci. Remote Sens. Lett. 2010, 7, 469–473. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Infrared Real Sequences # | Image Size | No of Frames | Target Characteristics | Target Type | Background Characteristics |
|---|---|---|---|---|---|
| # 1 | 256 × 200 | 30 | The target is small in size, yet it has a great imaging range. | A small ship | Blurred sea-sky backgrounds. |
| # 2 | 256 × 200 | 250 | The target is small in size, yet it has a great imaging range. | An airplane | High dense clouds with less local contrast |
| # 3 | 256 × 200 | 250 | The target is small in size, yet it has a great imaging range and SRC value is low. | An airplane | With varying background |
| # 4 | 128 × 128 | 100 | The target is small in size, yet it has a great imaging range and SRC value is low | A Helicopter | Changing background |
| # 5 | 128 × 128 | 200 | Small size with 1 or 2 target | A ship | Changing background |
| # 6 | 280 × 228 | 250 | The target is small in size, yet it has a great imaging range and SRC value is low | A man walking through the forest | Background with heavy clouds. |
| No. | Methods | Parameter Values |
|---|---|---|
| 1 | Max-Mean Filter [5] | Filter size 5 × 5 |
| 2 | Max-Median Filter [5] | Filter size 5 × 5 |
| 3 | Top-Hat filter [37] | Structure shape is 3 × 3 |
| 4 | NIPPS [19] | |
| 5 | RPCA [18] | |
| 6 | IPI model [1] | |
| 7 | RIPT [26] | |
| 8 | TV-PCP [23] | Patch size is 50 × 50, sliding step is 14, lambda = 0.005, maxIter = 250, = 1.5 |
| 9 | ISTD based on TV-PSMSV |
| ISTD | Evaluation Indicators | Seq1 | Seq2 | Seq3 | Seq4 | Seq5 | Seq6 |
|---|---|---|---|---|---|---|---|
| Top Hat | BSF | 0.488 | 2.339 | 0.512 | 2.354 | 0.923 | 0.923 |
| SCRG | 1.281 | 5.733 | 7.376 | 53.302 | 3.081 | 24.651 | |
| Max-Median | BSF | 1.296 | 3.895 | 0.747 | 3.249 | 1.167 | 1.195 |
| SCRG | 1.608 | 1.708 | 5.415 | 36.456 | 2.117 | 17.393 | |
| Max-Mean | BSF | 1.383 | 3.387 | 0.863 | 3.816 | 1.861 | 1.255 |
| SCRG | 1.529 | 1.580 | 6.461 | 51.109 | 3.117 | 17.867 | |
| IPI | BSF | 5.025 | 4.057 | 1.481 | 13.778 | 29.862 | 10.410 |
| SCRG | 0.047 | 3.450 | 5.665 | 263.310 | 125.505 | 195.948 | |
| RPCA | BSF | 3.799 | 25.882 | 3.073 | 6.468 | 0.494 | 3.790 |
| SCRG | 10.739 | 60.950 | 36.166 | 76.236 | 0.683 | 90.559 | |
| NIPPS | BSF | 4.604 | 6.169 | 2.687 | 6.726 | 7.413 | 7.576 |
| SCRG | 2.792 | 6.298 | 23.787 | 168.042 | 30.018 | 4.700 | |
| RIPT | BSF | 3.507 | 7.124 | 3.101 | 2.874 | 0.896 | 14.874 |
| SCRG | 2.122 | 4.835 | 9.308 | 1.233 | 0.062 | 0.038 | |
| TV-PCP | BSF | 1.403 | 4.948 | 1.776 | 3.002 | 1.477 | 3.026 |
| SCRG | 0.857 | 2.694 | 6.726 | 27.870 | 0.033 | 14.284 | |
| TV-PSMSV | BSF | 12.043 | 25.905 | 15.147 | 21.218 | 19.065 | 24.915 |
| SCRG | 14.384 | 62.224 | 95.985 | 189.954 | 2.061 | 218.774 |
| Method | Top-Hat | Max-Median | Max-Mean | RPCA | NIPPS | IPI | RIPT | TV-PCP | TV-PSMSV |
|---|---|---|---|---|---|---|---|---|---|
| Time (s) | 0.868 | 6.65 | 7.69 | 8.77 | 4.11 | 11.51 | 1.93 | 392.77 | 242.69 |
| Computational Cost | O (K2 M × N log K) | O (M × N × K2) | O (M × N × K2) | O (M × N2) | O (M × N2) | O (M × N2) | O (M × N2) | O (K × M × N2) | O (K × M × N2) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rawat, S.S.; Alghamdi, S.; Kumar, G.; Alotaibi, Y.; Khalaf, O.I.; Verma, L.P. Infrared Small Target Detection Based on Partial Sum Minimization and Total Variation. Mathematics 2022, 10, 671. https://0-doi-org.brum.beds.ac.uk/10.3390/math10040671
Rawat SS, Alghamdi S, Kumar G, Alotaibi Y, Khalaf OI, Verma LP. Infrared Small Target Detection Based on Partial Sum Minimization and Total Variation. Mathematics. 2022; 10(4):671. https://0-doi-org.brum.beds.ac.uk/10.3390/math10040671
Chicago/Turabian StyleRawat, Sur Singh, Saleh Alghamdi, Gyanendra Kumar, Youseef Alotaibi, Osamah Ibrahim Khalaf, and Lal Pratap Verma. 2022. "Infrared Small Target Detection Based on Partial Sum Minimization and Total Variation" Mathematics 10, no. 4: 671. https://0-doi-org.brum.beds.ac.uk/10.3390/math10040671