
A Note on Necessary Optimality Conditions for a Model with Differential Infectivity in a Closed Population

Abstract
:
{kind=link}
1. Introduction: Motivation
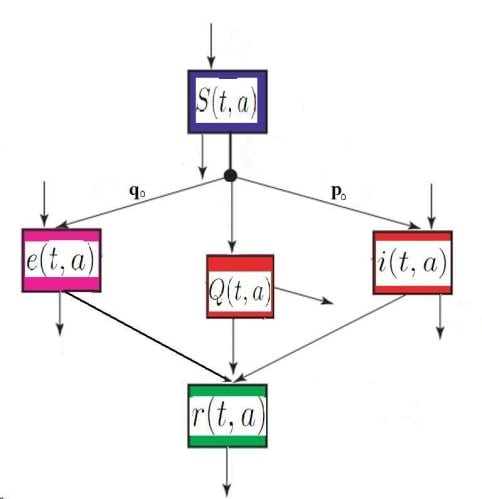
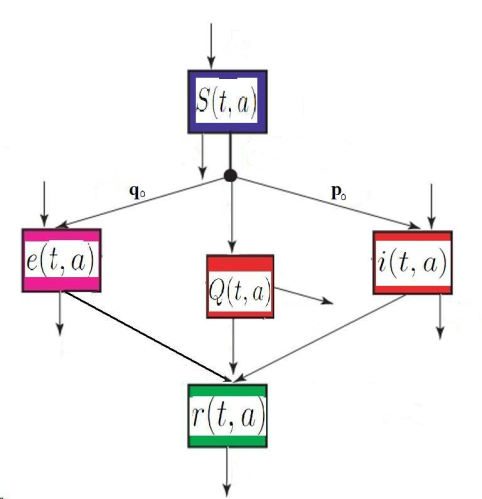
2. Formulation of the Model with Test/Detection, Containment Stage (Identification of Cases, Prophylaxis of Their Close Contacts, Promotion of Hygiene Rules and Protective Actions) and Vertical Transmission in a Closed Population
2.1. The age-structured model with horizontal and perinatal control
2.2. About the Well-posedness of the Age-Structured Model
3. Optimal Control Problem
3.1. About Existence of Optimal Control
3.2. Context of a Result of Feichtinger et al. [5]
- (in this epidemiological case);
- ,
- , ,
- ,
- ,
- ,
- Admissible control is any couple of measurable functions
- The function are Carathéodory (that is, measurable in the (eventually) three variables and continuous in the rest of variables), locally essentially bounded, differentiable in with locally Lipschitz partial derivatives, uniformly with respect to and , ;
- We assume that there exists an optimal solution (see interesting results of M. Brokate [9]);
- (see [5], pp. 56) ;
- (see [5], pp. 56) ;
- (see [5], pp. 56) ; ; ;
3.3. Necessary Optimality Conditions for the Model Studied
- is defined by
- is defined by
- , ,
- ,
- a-
- For a.e , and
- b-
- Moreover the minimization conditions of the Hamiltonian gives:
- c-
- If and are invertible (as for and ) then optimal control is explicitly described (for ) by:
4. Discussion
Acknowledgments
Conflicts of Interest
References
- Mclean, A.R.; Blumberg, B.S. Modeling the impact of Mass vaccination against Hepatitis B I. Model formulation and parameter estimation. Proc. Biol. Sci. 1994, 256, 7–15. [Google Scholar] [CrossRef]
- Sharpe, F.; Lotka, A. A problem in age-distribution. Philos. Mag. 1911, 6, 435–438. [Google Scholar] [CrossRef]
- Nokes, D.J.; Hall, A.J.; Edmunds, W.J.; Medley, G.F.; Whittle, H.C. The influence of age on the development of the hepatitis B carrier state. Proc. R. Soc. Lond. B Biol. Sci. 1993. [Google Scholar] [CrossRef]
- Foupouapouognigni, Y.; Sadeuh Mba, S.A.; A Betsem, E.B.; Rousset, D.; Froment, A.; Gessain, A.; Njouom, R. Hepatitis B and C virus infections in the three pygmy groups in Cameroon. J. Clin. Microbiol. 2011, 49, 737–740. [Google Scholar] [CrossRef] [PubMed]
- Feichtinger, G.; Tragler, G.; Veliov, V.M. Optimality conditions for age-structured control systems. J. Math. Anal. Appl. 2003, 288, 47–68. [Google Scholar] [CrossRef]
- Sharomi, O.; Malik, T. Optimal control in epidemiology. Ann. Oper. Res. 2015. [Google Scholar] [CrossRef]
- Ducrot, A.; Houpa, D.D.E.; Kouakep, T.Y. An age-structured model with differential susceptibility: Application to Hepatitis B Virus transmission. Available online: http://arxiv.org/abs/1505.06431 (accessed on 20 May 2015).
- Inaba, H. Threshold and stability results for an age-structured epidemic model. J. Math. Biol. 1990, 28, 411–434. [Google Scholar] [CrossRef] [PubMed]
- Brokate, M. Pontryagin’s principle for control problems in age-dependent population dynamics. J. Math. Biol. 1985, 23, 75–101. [Google Scholar] [CrossRef]
- Ducrot, A.; Magal, P.; Prevost, K. Integrated semigroups and parabolic equations. Part I: Linear perburbation of almost sectorial operators. J. Evol. Equ. 2010, 10, 263–291. [Google Scholar] [CrossRef]
- Pazy, A. Semigroups of Linear Operators and Applications to Partial Differential Equations; Springer-Verlag: Berlin, Germany, 1983. [Google Scholar]
- Picart, D.; Ainseba, B.; Milner, F. Optimal control problem on insect pest populations. Applied Mathematics Letter. 2011, 2, 1160–1164. [Google Scholar] [CrossRef]
- Sell, G.R.; You, Y. Dynamics of Evolutionary Equations; Springer: New York, NY, USA, 2002. [Google Scholar]
© 2015 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kouakep, Y.T. A Note on Necessary Optimality Conditions for a Model with Differential Infectivity in a Closed Population. Mathematics 2015, 3, 880-890. https://0-doi-org.brum.beds.ac.uk/10.3390/math3030880
Kouakep YT. A Note on Necessary Optimality Conditions for a Model with Differential Infectivity in a Closed Population. Mathematics. 2015; 3(3):880-890. https://0-doi-org.brum.beds.ac.uk/10.3390/math3030880
Chicago/Turabian StyleKouakep, Yannick Tchaptchie. 2015. "A Note on Necessary Optimality Conditions for a Model with Differential Infectivity in a Closed Population" Mathematics 3, no. 3: 880-890. https://0-doi-org.brum.beds.ac.uk/10.3390/math3030880