Global Stability of Fractional Order Coupled Systems with Impulses via a Graphic Approach


1
School of Mathematics Science, Huaqiao University, Quanzhou 362000, China
2
Department of Mathematics, Zhejiang Normal University, Jinhua 321004, China
3
School of Mathematical Sciences, Qufu Normal University, Qufu 273165, China
4
Department of Mathematics, Linyi University, Linyi 276000, China
*
Author to whom correspondence should be addressed.
Mathematics 2019, 7(8), 744; https://0-doi-org.brum.beds.ac.uk/10.3390/math7080744
Submission received: 7 July 2019
/
Revised: 12 August 2019
/
Accepted: 13 August 2019
/
Published: 15 August 2019
(This article belongs to the Special Issue Impulsive Control Systems and Complexity)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Based on the graph theory and stability theory of dynamical system, this paper studies the stability of the trivial solution of a coupled fractional-order system. Some sufficient conditions are obtained to guarantee the global stability of the trivial solution. Finally, a comparison between fractional-order system and integer-order system ends the paper.
1. Introduction
Due to the great significance in applied science (e.g., signal and image processing, artificial intelligence, pattern classification), the neural networks have attracted many scholars’ attention. There are a large amount of scientific research results on the stability and synchronization of both integer-order and fractional-order differential equations. For examples, one can refer to [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15]. Besides, there are many results about fractional equations such as [16,17,18,19,20,21,22]. However, in the real world, at certain moments, many behaviors in neural networks may experience a sudden change. They are affected by short-term perturbations whose duration is particularly short comparing to the process with no change. We can use impulsive differential equations to describe the phenomena. Some works considered the impulsive effects on the neural networks (e.g., see [23,24,25,26,27,28]). It is worthwhile to mention that the fractional-order impulsive differential equations were studied recently (see e.g., [29,30,31,32,33,34,35,36]). Among them, Stamov and Stamova [31,32,33,34] studied the almost periodicity of the fractional-order impulsive differential equations. It is difficult to get less conservative conditions to guarantee the global stability of a system. Recently, a new powerful tool is to apply graph theory to study the stability and synchronization of neural networks (see e.g., [37,38,39,40,41,42]. Inspired by the previous works, we consider the global stability of fractional-order coupled systems with impulses on digraph .
where are the impulses at moments and , as (see e.g., [30,31,32,43,44,45,46]). is assumed to be continuous and when the impulses are absent. For the fractional order systems, the criteria to determine the stability for the integer order differential systems may not be applicable because fractional derivative may not maintain the properties of the integer derivative. (e.g., see [47,48]). The difficulty comes from the following facts.
- 1.
- For the integer derivative, the sign of the first order derivative implies the monotonicity of a function. However, this is not valid for the fractional derivative (see [47]). This difference results in great difficulties to deal with the impulses at moment .
- 2.
- For the integer-order system , the first derivative implies the asymptotically stability in the sense of Lyapunov. However, this classical Lyapunov stability result is not valid for fractional-order system. The derivative does not imply the asymptotically stability (see Lemma 2 in next section). It can only guarantee the stability.
This paper is organized as follows. In Section 2, we give some preliminaries. In Section 3, main results of this paper is presented by employing graph theory. In Section 4, an example and its simulations are presented to verify the feasibility of the obtained results. Finally, Conclusions and Discussion end the paper.
2. Preliminaries
There are a lot of different definitions of fractional derivative (e.g., Riemann-Liouville, Caputo, the conformable fractional derivative, [49,50,51]). In this paper, we employ Caputo fractional integral and derivative.
Definition 1.
[50] The fractional integral with noninteger order for a function is defined as
where , is the initial time, is the gamma function, given by .
Definition 2.
[50] The Caputo fractional derivative of order μ for a function is defined as
in which , is the initial time, .
Lemma 1.
[52] Suppose that is a continuous and differentiable vector-value function. Then for any time instant , we have
when .
Lemma 2.
[47] Consider system , where , . Let be a continuously differentiable and positive definite function. Let be a positive definite function continuous at such that in the ball around with we have
Then and is stable at . In particular, . For , ( is asymptotically stable at ).
A directed graph or digraph contains a vertex set and a set E of arcs from p to q. is said to be spanning if the vertex set of is the same as . If each is assigned a positive weight , then we say graph is weighted. In our convention, if and only if there is an arc from p to q. The weight of a subgraph is the product of the weight of each arc.
A directed path in is a subgraph with vertices such that its set of arcs is . If the arc exists, then we call a directed cycle. If there does not exist any cycle in the connected subgraph , then we call a tree. For a tree , if there does not exist any arc to vertex p, then is rooted at vertex p. If a subgraph is a disjoint union of some rooted trees and the roots of these trees can form a directed cycle, then we say is unicyclic.
For a given weighted digraph with n vertices, is the weight matrix whose entry is the weight of if it exists, and 0 otherwise. For our purpose, we write a weighted digraph as . If for any pair of vertices there exists a directed arc from one to the other, then is strongly connected. The we define the Laplacian matrix of as
Let be the cofactor of the p-th diagonal element of L. Then we have the following results.
Lemma 3.
[40] Assume . Then
where is the set of all spanning trees of that are rooted at vertex p, and is the weight of . In particular, if is strongly connected, then for .
For the coupled system on a directed graph :
where , , represent the influence from vertex p to vertex q, and if there does not exist arc from p to q in .
Motivated by Theorem 3.4 in [40], for fractional-order systems, we have the following theorem.
Theorem 1.
Assume that the following assumptions hold.
- (i)
- For the Lyapunov function on each vertex. There exist , , and such thatholds.
- (ii)
- Along each directed cycle in the weighted digraph , ,
- (iii)
- are constants which are given in Lemma 3.Then satisfieswhere .
Proof.
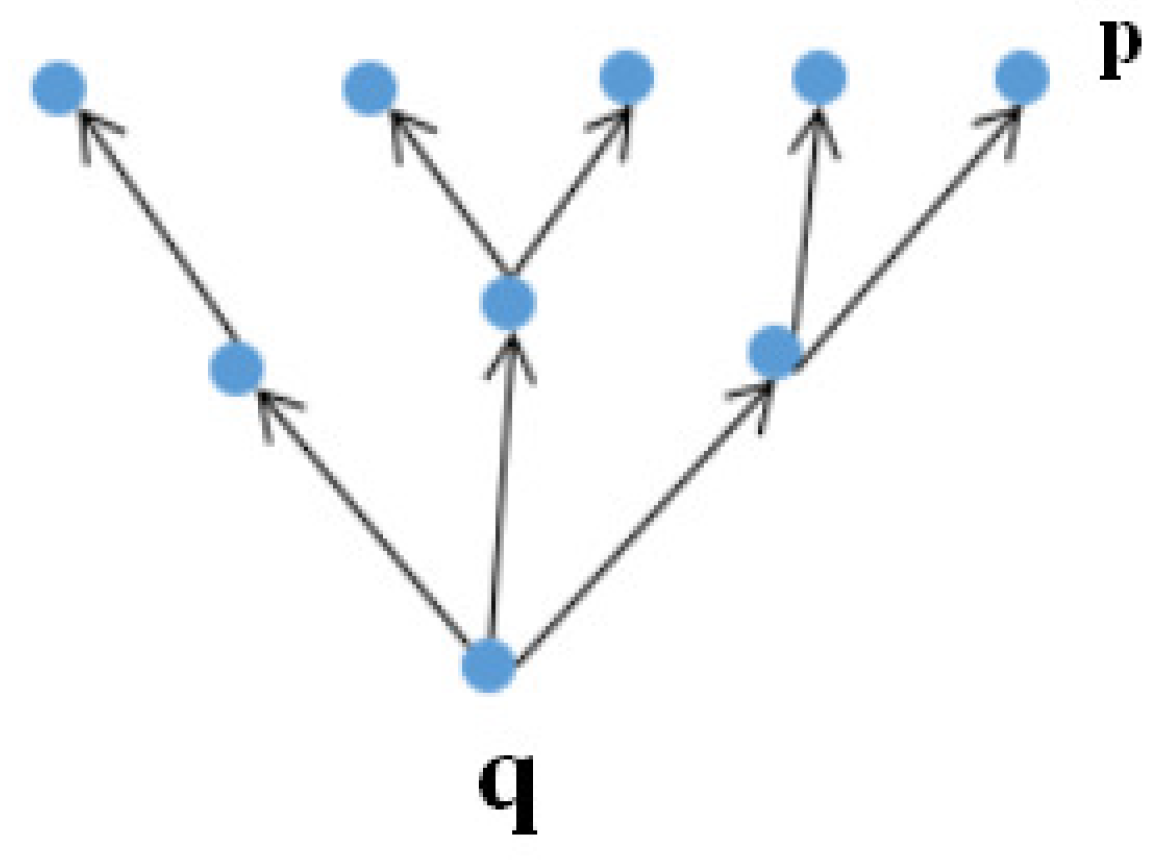
For a spanning tree (see Figure 1) rooted at q, by adding an arc from p to q, we obtain a unicyclic graph (see Figure 2).
According to the definition for the weight of a graph, we have . As a result, , . Here , , are arbitrary functions, denotes the directed cycle of .
When we do this operation to all rooted spanning trees in diagraph in all possible ways, we will derive all unicyclic graphs in . Then we get
where is a set which includes all spanning unicyclic graphs of .
Based on the definition of the Caputo fractional order derivative, we know that easily. Thus, for , we have
In view of the condition (ii) and , we have
here . □
Remark 1.
To study the stability of the coupled systems, constructing a proper Lyapunov function is of great importance. Theorem 1 reveals that a global Lyapunov function for (3) can be the combination of the Lyapunov function of each vertex system, which decreases the difficulty for us.
3. Main Results
Given a network represented by a digraph with n vertices. Assume that the dynamic of each vertex is described by the following impulsive differential equation:
, where , is the self-regulating parameters of the p-th vertex, represents the weight of the arc from vertex p to q. is the neuron activation function satisfying Lipschitz condition: for all , there exists a Lipschitz constant such that In addition, .
Now we consider the following impulsive coupled system on digraph :
Theorem 2.
Assume is strongly connected. If the following conditions hold:
- (1)
- ;
- (2)
- , where ;
- (3)
- In each interval, satisfies .
Then the trivial solution of (5) is globally stable.
Proof.
Let , along every directed cycle of the weighted digraph we have .
Let , . In view of Theorem 1, we obtain
where . Now we select , then is a positive definite function. From lemma 2, we know that the trivial solution is globally stable when .
When , . Besides, , then we can obtain
Due to , then . In view of the third condition of this theorem, we derive
As a consequence, in each interval, we get . In view of , as , then as .
This ends the proof. □
4. Example and Numerical Simulation
In this section, we study the following fractional impulsive system on a digraph with two vertices.
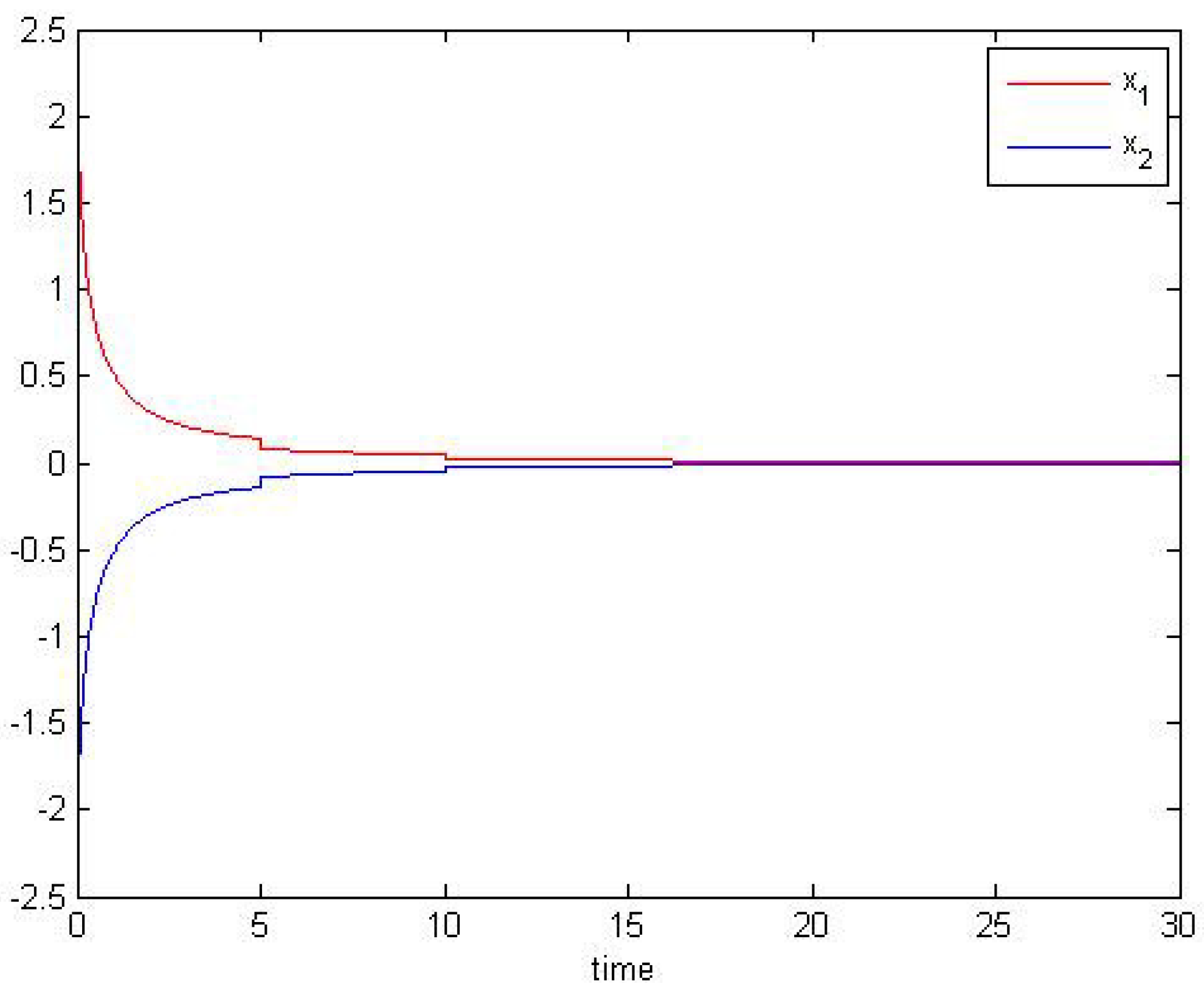
When , , , , , . Obviously, we can take the Lipschitz constant . The initial conditions are assumed that and are and . The simulation result for the above system is shown in Figure 3.
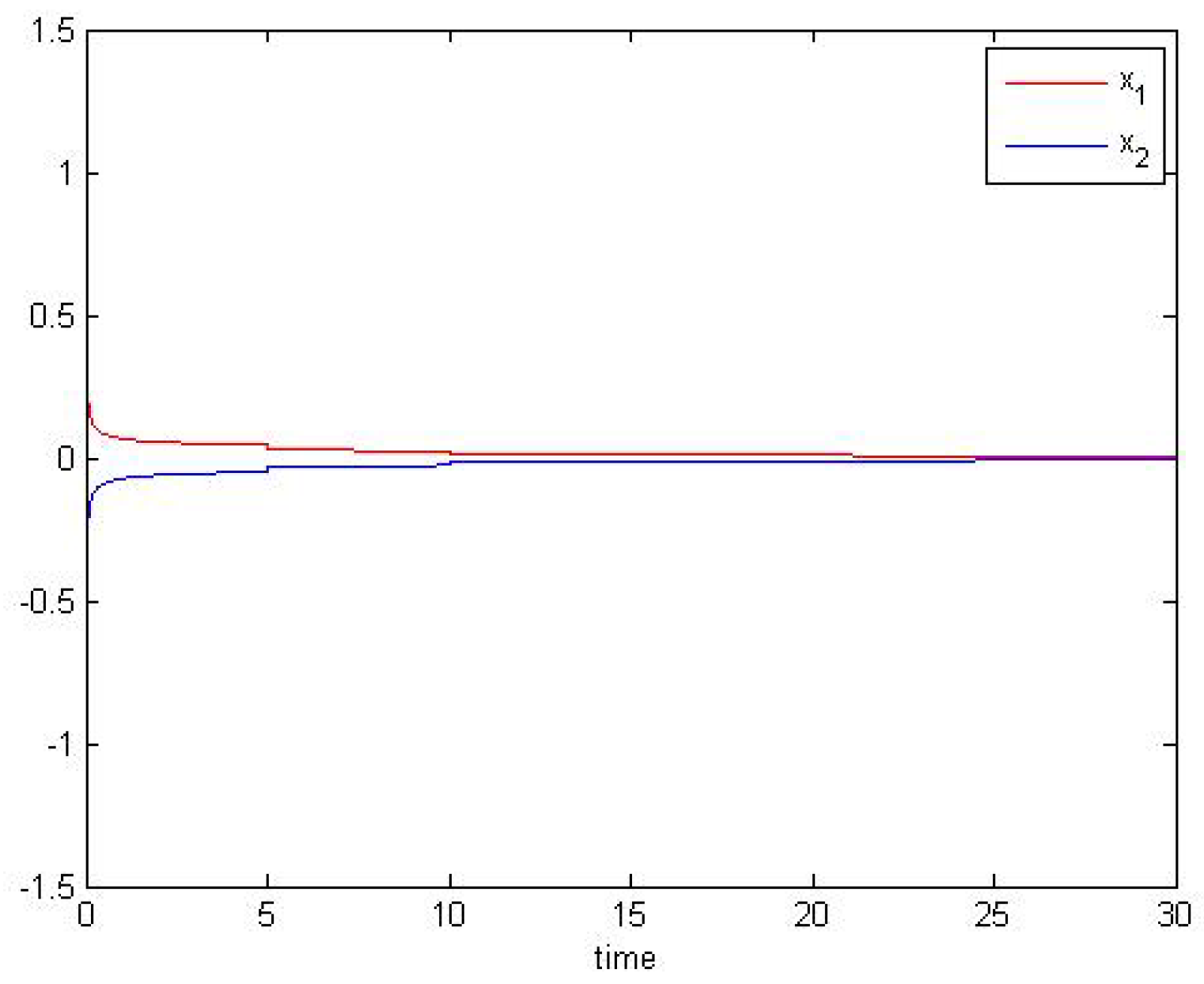
When , , , , , , . Obviously, we can take the Lipschitz constant . The initial conditions are assumed that and are and . The simulation result for the above system is shown in Figure 4.
5. Conclusions and Discussions
In this paper, we apply the graph theory and stability theory of dynamical system to study the stability of a coupled fractional-order system. This method can be extended to the other complex networks or multi-layer networks. In fact, many classical results for the integer-order system are not valid for the fractional-order system. We summarize the differences between fractional derivative and integer derivative as follows.
- 1.
- For the integer derivative, the sign of the first order derivative implies the monotonicity of a function. However, this is not valid for the fractional derivative (see [47]). This difference raises great difficulties for us to deal with the impulses at moment . In order to ensure the stability of the trivial solution of (5), we have to add the condition .
- 2.
- For the integer-order system , the first derivative implies the asymptotically stability in the sense of Lyapunov. However, this classical Lyapunov stability result is not valid for fractional-order system. The derivative does not imply the asymptotically stability in view of Lemma 2. It can only guarantee the stability.
Author Contributions
B.Z. carried out the computations in the proof. Y.X. conceived of the study, designed, drafted and edited the manuscript. L.Z. helped to make the figures. H.L. and L.G. participated in the discussion of the project. All authors read and approved the final manuscript.
Funding
This work was jointly supported by the National Natural Science Foundation of China under Grant (No. 11671176 and No. 11871251), Natural Science Foundation of Fujian Province under Grant (No. 2018J01001), start-up fund of Huaqiao University (Z16J00039).
Conflicts of Interest
The authors declare that they have no conflict of interest.
References
- Ali, M.S.; Gunasekaran, N.; Cao, J. Sampled-data state estimation for neural networks with additive time-varying delays. Acta Math. Sci. 2019, 39, 195–213. [Google Scholar]
- Ali, M.S.; Gunasekaran, N.; Agalya, R.; Joo, Y.H. Non-fragile synchronisation of mixed delayed neural networks with randomly occurring controller gain fluctuation. Int. J. Syst. Sci. 2018, 49, 3354–3364. [Google Scholar]
- Balasubramaniam, P.; Chandran, R.; Jeeva, S. Synchronization of chaotic nonlinear continuous neural with time-varying delay. Cogn. Neurodyn. 2011, 5, 361–371. [Google Scholar] [CrossRef]
- Bao, H.B.; Park, J.H.; Cao, J.D. Synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dynam. 2015, 158, 1343–1354. [Google Scholar] [CrossRef]
- Chen, H.; Sun, J.T. Stability analysis for coupled systems with time delay on networks. Physica A 2012, 391, 528–534. [Google Scholar] [CrossRef]
- Chen, J.; Zeng, Z.; Jiang, P. Global Mittag-Lefflter stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef]
- Chen, L.; Huang, C.; Liu, H.; Xia, Y. Anti-synchronization of a class of chaotic systems with application to Lorenz system: a unified analysis of the integer order and fractional order. Mathematics 2019, 7, 559. [Google Scholar] [CrossRef]
- Li, H.; Cao, J.; Hu, C.; Zhang, L.; Wang, Z. Global synchronization between two fractional-order complex networks with non-delayed and delayed coupling via hybrid impulsive control. Neurocomputing 2019, 356, 31–39. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y. On reachability and controllability of switched Boolean control networks. Automatica 2012, 48, 2917–2922. [Google Scholar] [CrossRef]
- Liu, X.; Ho, D.W.; Yu, W.; Cao, J. A new switching design to finite-time stabilization of nonlinear systems with applications to neural networks. Neural Netw. 2014, 57, 94–102. [Google Scholar] [CrossRef]
- Liu, X.; Su, H.; Chen, M. A switching approach to designing finite-time synchronizing controllers of couple neural networks. Trans. Neural Netw. Learn. Syst. 2016, 27, 471–482. [Google Scholar] [CrossRef]
- Zhang, B.; Zhuang, J.; Liu, H.; Cao, J.; Xia, Y. Master-slave synchronization of a class of fractional-order Takagi-Sugeno fuzzy neural networks. Adv. Differ. Equ. 2018, 473. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhuang, J.; Xia, Y.; Bai, Y.; Cao, J.; Gu, L. Fixed-time synchronization of the impulsive memristor-based neural networks. Commun. Nonlinear Sci. Numer. Simulat. 2019, 77, 40–53. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, R.; Cao, J.; Alsaedi, A. Synchronization of a class of fractional-order neural networks with multiple time delays by comparison. Nonlinear Anal. Model. Control 2017, 22, 636–645. [Google Scholar] [CrossRef]
- Zhuang, J.; Cao, J.; Tang, L.; Xia, Y.; Prec, M. Synchronization analysis for stochastic delayed multi-layer network with additive coupling. IEEE Trans. Syst. Man Cybern. Syst. 2018, 99, 1–10. [Google Scholar] [CrossRef]
- Anderson, J.; Kim, E.; Moradi, S. A fractional Fokker-Planck model for anomalous diffusion. Phys. Plasmas 2014, 21, 122109. [Google Scholar] [CrossRef] [Green Version]
- Anderson, J.; Moradi, S.; Rafiq, T. Non-linear Langevin and Fractional Fokker-Planck equations for anomalous diffusion by Lévy Stable Processes. Entropy 2018, 20, 760. [Google Scholar] [CrossRef]
- Del-Castillo-Negrete, D. Non-diffusive, non-local transport in fluids and plasmas. Nonlinear Process. Geophys. 2010, 17, 795–807. [Google Scholar] [CrossRef] [Green Version]
- Da Fonseca, J.D.; del-Castillo-Negrete, D.; Caldas, I.L. Area-preserving maps models of gyroaveraged E × B Chaotic transport. Phys. Plasmas 2014, 21, 092310. [Google Scholar] [CrossRef]
- Tarasov, V.E. Fractional Liouville and BBGKI equations. J. Phys. Conf. Ser. 2005, 7, 17–33. [Google Scholar] [CrossRef] [Green Version]
- Tarasov, V.E. Fractional statistical mechanics. Chaos 2006, 16, 331081–331087. [Google Scholar] [CrossRef]
- Zaslavsky, G.M. Chaos, fractional kinetics, and anomalous transport. Phys. Rep. 2002, 371, 461–580. [Google Scholar] [CrossRef]
- Li, X.; Ho, D.W.; Cao, J. Finite-time stability and settling-time estimation of nonlinear impulsive systems. Automatica 2019, 99, 361–368. [Google Scholar] [CrossRef]
- Li, X.; Song, S. Stabilization of delay systems: Delay-dependent impulsive control. Trans. Autom. Control 2017, 62, 406–411. [Google Scholar] [CrossRef]
- Li, X.; Wu, J. Sufficient stability conditions of nonlinear differential systems under impulsive control with state-dependent delay. Trans. Autom. Control 2018, 63, 306–311. [Google Scholar] [CrossRef]
- Lu, J.; Ho, D.W.; Cao, J.; Kurths, J. Exponential synchronization of linearly coupled neural networks with impulsive disturbances. Trans. Neural Netw. 2011, 22, 329–336. [Google Scholar] [CrossRef]
- Lu, J.; Kurths, J.; Cao, J.; Mahdavi, N. Synchronization control for nonlinear stochastic dynamical networks: pinning impulsive strategy. Trans. Neural Netw. Learn. Syst. 2012, 23, 285–292. [Google Scholar]
- Xia, Y.; Cao, J.; Cheng, S.S. Global exponential stability of delayed cellular neural networks with impulses. Neurocomputing 2007, 70, 2495–2501. [Google Scholar] [CrossRef]
- Guo, H.; Li, M.Y.; Shuai, Z. Global dynamics of a general class of multistage models for infectious diseases. SIAM J. Appl. Math. 2012, 72, 261–279. [Google Scholar] [CrossRef]
- Nieto, J.; Stamov, G.; Stamova, I. A fractional-order impulsive delay model of price fluctuations in commodity markets: Almost periodic solutions. Eur. Phys. J. Spec. Top. 2017, 226, 3811–3825. [Google Scholar] [CrossRef]
- Stamov, G.; Stamova, I. Impulsive fractional functional differential systems and Lyapunov method for the existence of almost periodic solutions. Rep. Math. Phys. 2015, 75, 73–84. [Google Scholar] [CrossRef]
- Stamov, G.; Stamova, I.; Cao, J. Uncertain impulsive functional differential systems of fractional order and almost periodicity. J. Frankl. Inst. 2018, 355, 5310–5323. [Google Scholar] [CrossRef]
- Stamova, I. Global Mittag-Leffler stability and synchronization of impulsive fractional-order neural networks with time-varying delays. Nonlinear Dynam. 2014, 77, 1251–1260. [Google Scholar] [CrossRef]
- Stamova, I. Global stability of impulsive fractional differential equations. Appl. Math. Comput. 2014, 237, 605–612. [Google Scholar] [CrossRef]
- Wang, F.; Yang, Y.; Hu, M. Asymptotic stability of delayed fractional-order neural networks with impulsive effects. Neurocomputing 2015, 154, 239–244. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, Y.; Fečkan, M. Nonlinear impulsive problems for fractional differential equations and Ulam stability. Comput. Math. Appl. 2012, 64, 3389–3405. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Li, M.Y.; Shuai, Z. A graph-theoretic approach to the method of global Lyapunov functions. Proc. Am. Math. Soc. 2008, 136, 2793–2802. [Google Scholar] [CrossRef]
- Guo, B.; Xiao, Y.; Zhang, C. Graph-theoretic approach to exponential synchronization of coupled systems on networks with mixed time-varying delays. J. Frankl. Inst. 2017, 354, 5067–5090. [Google Scholar] [CrossRef]
- Guo, B.; Xiao, Y.; Zhang, C. Synchronization analysis of stochastic coupled systems with time delay on networks by periodically intermittent control and graph-theoretic method. Nonlinear Anal. Hybrid Syst. 2018, 30, 118–133. [Google Scholar] [CrossRef]
- Li, M.Y.; Shuai, Z.S. Global-stability problem for coupled systems of differential equations on networks. J. Differ. Equ. 2010, 248, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Suo, J.; Sun, J.; Zhang, Y. Stability analysis for impulsive coupled systems on networks. Neurocomputing 2013, 99, 172–177. [Google Scholar] [CrossRef]
- Zhang, C.; Li, W.; Wang, K. Graph-theoretic method on exponential synchronization of stochastic coupled networks with Markovian switching. Nonlinear Anal. Hybrid Syst. 2015, 15, 37–51. [Google Scholar] [CrossRef]
- Guo, Y.; Ding, X. Razumikhin method to global exponential stability for coupled neutral stochastic delayed systems on networks. Math. Meth. Appl. Sci. 2017, 40, 5490–5501. [Google Scholar] [CrossRef]
- Li, X.; Yang, X.; Huang, T. Persistence of delayed cooperative models: Impulsive control method. Appl. Math. Comput. 2019, 342, 130–146. [Google Scholar] [CrossRef]
- Li, X.; Shen, J.; Rakkiyappan, R. Persistent impulsive effects on stability of functional differential equations with finite or infinite delay. Appl. Math. Comput. 2018, 329, 14–22. [Google Scholar] [CrossRef]
- Shen, J.; Chen, L.; Yuan, X. Lagrange stability for impulsive Duffing equations. J. Differ. Equ. 2019, 266, 6924–6962. [Google Scholar] [CrossRef]
- Gallegos, J.A.; Duarte-Mermoud, M.A. On the Lyapunov theory for fractional order systems. Appl. Math. Comput. 2016, 287, 161–170. [Google Scholar] [CrossRef]
- Lakshmikantham, V.; Leela, S.; Sambandham, M. Lyapunov theory for fractional differential equations. Commun. Appl. Anal. 2008, 12, 365–376. [Google Scholar]
- Liang, J.; Tang, L.; Xia, Y.; Zhang, Y. Bifurcations and exact solutions for a class of mKdV equation with the conformable fractional derivative via dynamical system method. Int. J. Bifur. Chaos 2020. to appear in the first issue. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Zhu, W.; Xia, Y.; Zhang, B.; Bai, Y. Exact traveling wave solutions and bifurcations of the time fractional differential equations with applications. Int. J. Bifur. Chaos 2019, 29, 1950041. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Diestel, R. Graph Theory; Springer: New York, NY, USA, 2000. [Google Scholar]
Figure 1.
A rooted tree .

Figure 2.
A unicyclic graph .

Figure 3.
Dynamical behaviors of states and under above parameters.

Figure 4.
Dynamical behaviors of states and under above parameters.

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhang, B.; Xia, Y.; Zhu, L.; Liu, H.; Gu, L. Global Stability of Fractional Order Coupled Systems with Impulses via a Graphic Approach. Mathematics 2019, 7, 744. https://0-doi-org.brum.beds.ac.uk/10.3390/math7080744
AMA Style
Zhang B, Xia Y, Zhu L, Liu H, Gu L. Global Stability of Fractional Order Coupled Systems with Impulses via a Graphic Approach. Mathematics. 2019; 7(8):744. https://0-doi-org.brum.beds.ac.uk/10.3390/math7080744
Chicago/Turabian StyleZhang, Bei, Yonghui Xia, Lijuan Zhu, Haidong Liu, and Longfei Gu. 2019. "Global Stability of Fractional Order Coupled Systems with Impulses via a Graphic Approach" Mathematics 7, no. 8: 744. https://0-doi-org.brum.beds.ac.uk/10.3390/math7080744
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.