4.1.2. Safety-Based Attacks and Control System Cybersecurity: Process Design Example
The goal of this section is to provide insights into the connections between process design and control system cybersecurity before proceeding to the following section, in which the potential benefits of LEMPC and its stability region for this task will be highlighted. In the process example in this section, we explore cybersecurity considerations for chemical processes from a process design perspective using a process example comprised of two CSTR’s in series, followed by a flash drum with recycle of condensed vapor from the flash drum back to the first CSTR. The reactant
A is fed to CSTR 1 (Vessel 1) at concentration
and flow rate
, as well as to CSTR 2 (Vessel 2) at concentration
and flow rate
. The flow rate of the recycle stream from the flash drum (Vessel 3) is
, and the product stream (denoted by
) is the liquid stream leaving the flash drum. The desired product is
B and the undesired product is
C, where both are produced from
A. The manipulated inputs are the rates of heat supplied to or removed from Vessels 1, 2, and 3 at rates
,
, and
, respectively. The model equations are presented below and are taken from [
34], though with slight changes to the equations for the concentrations
,
, and
of species
A,
B, and
C in the recycle stream:
where
D is an inert material,
is the relative volatility of species
j at the flash drum conditions, and
,
, is the concentration of species
j in the liquid in Vessel
i (
is the temperature in Vessel
i).
, where
and
are computed as follows:
where
where
is the density of the liquid and
is the molar density (which is given the same value in the liquid and vapor in this simulation) in the flash drum, and
represents the molecular weight of species
j.
Table 1 lists the values of the parameters used in the above equations.
The state vector of the process is denoted by
=
, with steady-states denoted with an “ss” subscript for each state. The following results will consider two steady-states, one that is open-loop unstable (
=
) and one that is open-loop stable (
=
), where steady-state stability was assessed based on the eigenvalues of the numerically approximated linearization of the dynamic model [
35]. For both steady-states, the manipulated inputs are
kJ/h,
kJ/h,
kJ/h, and
m
/h.
In the following, we will first revisit the results from [
27] which demonstrate the relationship between cyberattacks and process design by operating the CSTR under an MPC, and then extend these. We consider lower and upper bounds on
,
, and
of
and
kJ/h and the upper and lower bounds on
of −5 and 5 m
/h. The MPC uses the following steady-state tracking stage cost:
where
q is
u when the process is operated around the unstable steady-state and
s when it is operated around the stable steady-state. The weighting matrix in the stage cost is
. In the simulations, the dynamic model of Equations (
14)–(
28) is integrated using the Explicit Euler numerical integration method with an integration step size of
h. The MPC uses the process dynamic model in Equations (
14)–(
28) for making state predictions. The process is operated for one hour with controller parameters of
and
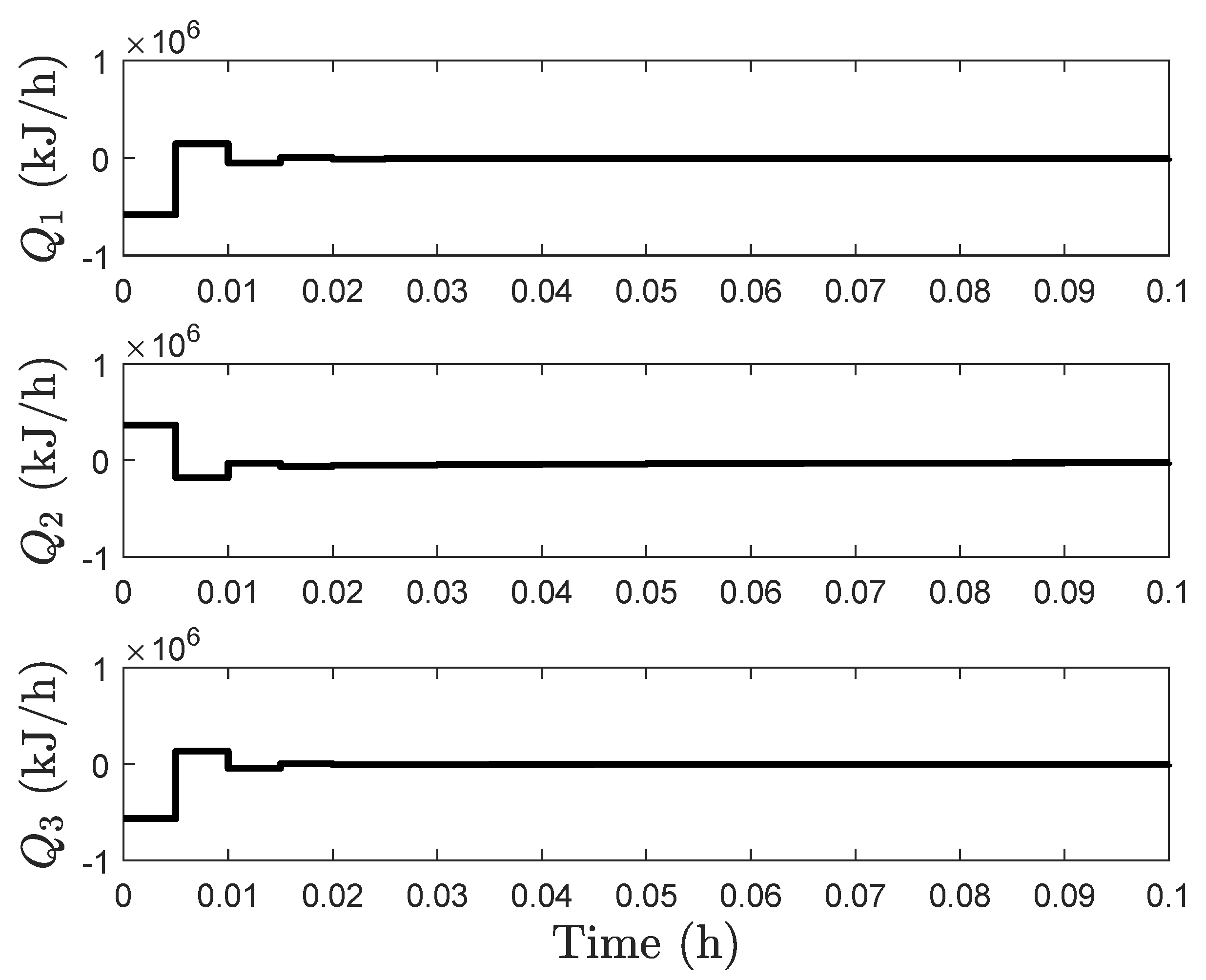
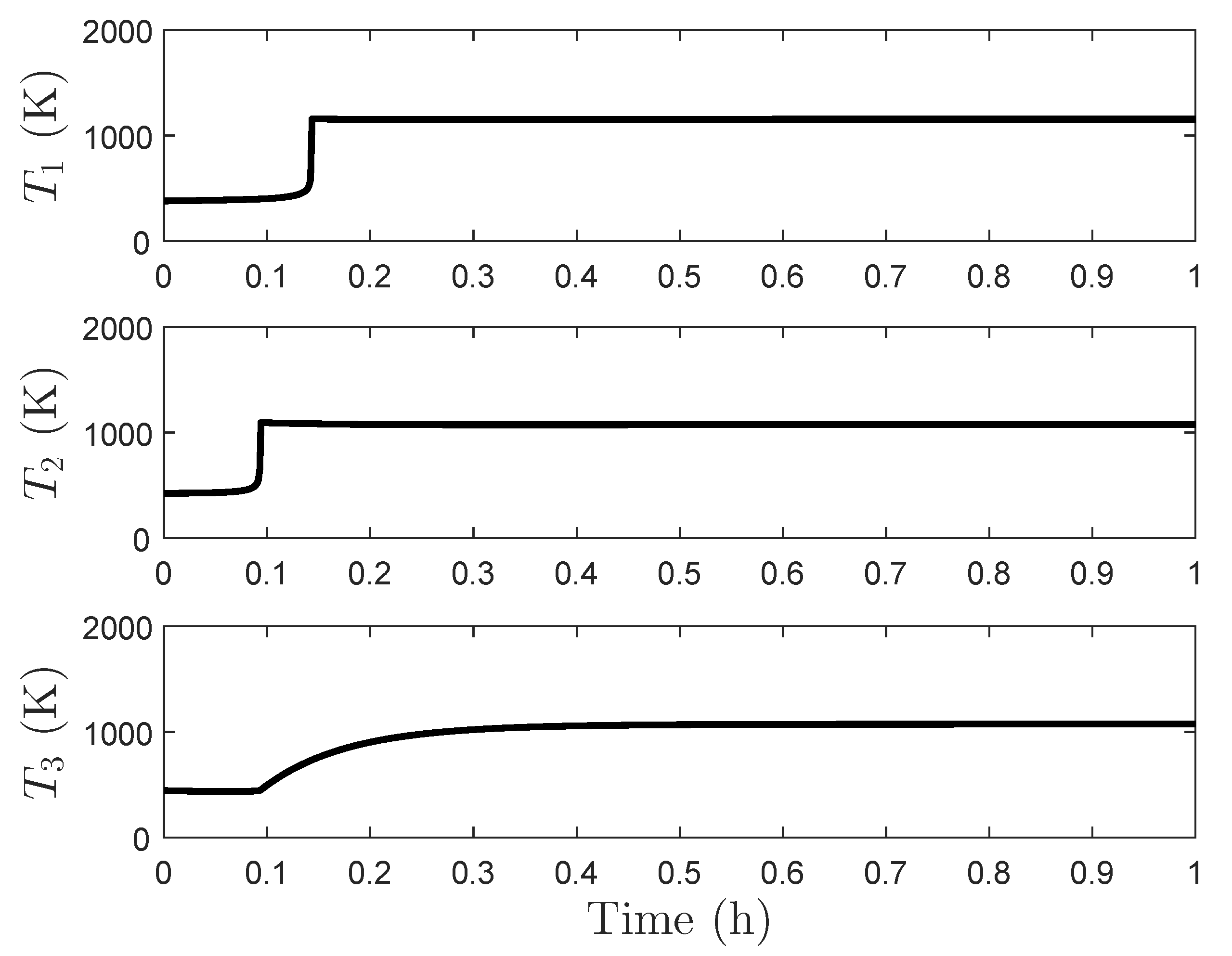
h. MATLAB’s fmincon function was used to solve the MPC optimization problems. Throughout this paper, due to the reasonable controller behavior in all simulations using fmincon, both local minima found by fmincon, as well as possible local minima (without checking whether they were truly local minima) were accepted as solutions to the MPC optimization problems. Because they will be explored further below, the temperature trajectories in the three vessels and the heat inputs when the process is operated under the MPC designed around the unstable steady-state for the first 0.1 h of operation are shown in
Figure 1 and
Figure 2. The closed-loop state is observed to be driven to the steady-state value by the controller in the absence of disturbances or plant-model mismatch.
For the design with the parameters in
Table 1, we explore the impacts of cyberattacks on the MPC when the process is operated around the unstable steady-state and when it is operated around the stable steady-state. When the MPC is operated around the unstable steady-state (i.e.,
in Equation (
29)) and the process is initialized from
=
+
10
but with a false state measurement (denoted by
) of
provided to the MPC at every sampling time, the state and input trajectories in
Figure 3 and
Figure 4 are obtained. This attack takes advantage of nonlinear dynamic behavior (e.g., as shown in
Figure 3, the heat rate inputs did not need to be high for the temperatures in the units to become high). In this case, the MPC believes that the state is at the steady-state, and therefore computes the steady-state input, which is not stabilizing for an initial condition slightly off of the steady-state (instead, it causes the closed-loop state to approach a different but stable higher-temperature steady-state). It is noted that this issue may not be able to be readily handled via techniques for accounting for disturbances in MPC (e.g., by estimating the disturbance), as in this case, the controller is not aware of the mismatch between the actual state and the steady-state, and therefore attempts to account for the mismatch between those states as a disturbance would not necessarily be helpful. It also is a relatively easy attack to recognize given the dynamics of unstable systems and the control law considered, despite the multi-unit and interconnected nature of the system. However, fixing of the inputs at the values in
Figure 4 is the same effect as would be observed if those actuators were to be fixed at their values via a fault; HAZOP studies should have indicated this and caused the system to be instrumented with, perhaps, a safety valve to prevent the temperatures in the reactor from ever hitting such levels physically. Specifically, because the safety system in that case is actuated based on a problematic process state (pressure) regardless of the path by which that pressure was reached, then whether a cyberattack or a fault caused that condition, the process is protected against it. In contrast, when the process is operated around the stable steady-state (i.e.,
) and the operating steady-state (now
) is provided as the false state measurement at every sampling time, this attack strategy drives the closed-loop state to the steady-state
because it causes the MPC to again compute the steady-state input (which for the open-loop stable steady-state is stabilizing from
).
We now look in greater detail at the role of process design in the success of cyberattacks by analyzing a similar attack on the process described above (i.e., an attack involving a false measurement corresponding to an alternative unstable steady-state
of a re-designed process being applied to the process initialized at
=
+
10
). To re-design the process, it was assumed that though there should be bounds on the states of Vessels 1, 2, and 3, the only states for which it is necessary to maintain the values at specific targets during re-design were the concentration of the product in the product stream (
) and the concentration of the byproduct in this stream (
). It was desired to locate a steady-state for this process for which
was minimized, subject to lower and upper bounds on the vector
of decision variables of the re-design (
=
; the lower bound vector was
m
0.2 m
0.2 m
0.2 m
/h 260 K 260 K
kJ/h
kJ/h
kJ/h −5 m
/h 260 K 0 kmol/m
0 kmol/m
0 kmol/m
260 K 0 kmol/m
0 kmol/m
0 kmol/m
260 K 0 kmol/m
, and the upper bound vector was
m
10 m
10 m
10 m
/h 500 K 500 K
kJ/h
kJ/h
kJ/h 5 m
/h 500 K 4 kmol/m
3 kmol/m
2 kmol/m
500 K 4 kmol/m
3 kmol/m
2 kmol/m
500 K 4 kmol/m
). MATLAB’s function fmincon was used to find a locally optimal solution to this design problem, subject to the requirement that Equations (
14)–(
28) be satisfied at the steady-state with
kmol/m
and
kmol/m
as at the unstable steady-state
. The resulting design is
m
,
m
,
m
,
m
/h,
K, and
K, with the steady-state
K 0.57 kmol/m
0.15 kmol/m
0.05 kmol/m
364.63 K 0.26 kmol/m
0.41 kmol/m
0.10 kmol/m
260.00 K 0.29 kmol/m
0.50 kmol/m
0.12 kmol/m
corresponding to inputs
kJ/h,
kJ/h,
kJ/h, and
m
/h. The results from the cyberattack being performed on this process are shown in
Figure 5. In contrast to
Figure 3 and
Figure 4, the maximum temperatures reached in
Figure 5 are approximately 919 K for
, 1003 K for
, and 895 K for
, whereas in
Figure 3, they are approximately 1156 K for
, 1093 K for
, and 1073 K for
. In the above, only one cyberattack was examined with the design change, but the lower temperatures reached in the time period examined in
Figure 5 compared to
Figure 3 indicates that for the same design values of
and
, an attack providing the steady-state measurement to an MPC for a process designed around the steady-state in
Figure 5 when initiated slightly off that steady-state may be able to be withstood with equipment with a lower design temperature than the process in
Figure 3.
4.1.3. Safety-Based Attacks and Control System Cybersecurity: Equipment and Safety System Design
Based on the results of the above sections, when cyberattacks are not seeking to impact conditions which depend on past states and inputs (as might occur with, for example, fatigue) cyberattack resilience of a process design might be analyzed by considering what set of states can be accessed from all initial conditions and under all input trajectories possible, given the system dynamics and any changes in the dynamics as safety systems are activated. This means that, if all allowable initial conditions can be characterized (as, for example, would be theoretically true with LEMPC, where the set of allowable initial conditions could be characterized as those within the set ), then simulations can be performed which consider all states which could be reached from these conditions for inputs in the input bounds. For example, from all allowable initial conditions, the state at the next sampling time could be obtained under all possible values of the inputs via simulation (the state and input spaces would need to be discretized to carry this out practically). For each resulting state at the next sampling time that is in the stability region, because the path to that state is not considered important and those states were just tested as initial conditions under all possible inputs to see where the closed-loop state can go at the end of the sampling period, they do not need to be tested again. However, for any that go outside the stability region or access new states not previously tested, further simulations must be done from each of those points until eventually all points that are the final states at the end of each sampling period were already tested as an initial condition for another. This does not account for disturbances, which could also be discretized and the above problem considered for every possible one. Notably, this is no different than the procedure that could be used for faults.
Below, we sketch how this concept for performing such an analysis could be initiated using two continuous stirred tank reactor examples, one which uses a safety system, and one which does not. A goal of the examples in this section is also to clarify the significant similarity between cyberattack-resilient process designs and those which maintain safety under process faults, while also highlighting key differences.
The first system to be explored will revisit an example previously presented in [
27], but with a slight change for the purpose of presenting the resilient design mechanism outlined above. This example consists of a continuous stirred tank reactor (CSTR) which is followed by process piping and is considered for converting species
A to
B, where the piping is rigidly fixed at the CSTR outlet and has a bellows joint with spring constant
on the other side. The concentration of reactant
and temperature
T in the reactor evolve according to the following dynamic model:
where the inlet reactant concentration
and heat rate
Q are the manipulated inputs. The parameters
F,
,
V,
E,
,
,
, and
(provided in
Table 2) correspond to the flow rate through the CSTR, the pre-exponential constant, the CSTR volume, the reaction activation energy, the enthalpy of reaction, the ideal gas constant, the heat capacity of the liquid in the CSTR, and the density of the liquid in the CSTR, respectively.
As in [
27], we consider that the goal in characterizing the worst-case conditions under a cyberattack is to select appropriate equipment designs for the CSTR and piping if possible. In particular, we here focus on the value of
, which could have a significant impact on the ability of the equipment to withstand a cyberattack. To see this, consider that the yield strength of the piping is 270 MPa, and that its thermal expansion coefficient, Young’s Modulus, length, and cross-sectional area are
K
, 200 GPa,
m, and
m
, respectively [
36]. The CSTR is controlled by an MPC with the stage cost stage cost:
and with the inputs restricted as follows:
kmol/m
and
kJ/h. In [
27], this process was examined without additional constraints on the states and inputs. In this section, however, we will extend the work in [
27] to present a concept for determining the worst-case conditions which could occur under a cyberattack so that equipment might be designed to withstand it. To analyze the worst-case condition, it is helpful to characterize the set of allowable initial conditions, which is done by using Lyapunov-based stability constraints to bound these conditions. In particular, Lyapunov-based stability constraints are developed around the steady-state
kmol/m
,
K,
kmol/m
, and
kJ/h, (i.e., we define
and
), using
, with
P given as follows:
The model of Equations (
30) and (
31) has the form
, where
represents a vector function derived from Equations (
30) and (
31) that is not multiplied by
u, and
represents the vector function which multiplies
u in these equations. The Lyapunov-based controller
was designed such that
kmol/m
and
is first computed as follows (Sontag’s Formula [
37]):
and then saturated at the input bounds if they are exceeded.
and
are Lie derivatives of
V with respect to the vector functions
and
, respectively.
and
were set to 300 and 225, respectively.
It should be noted that in [
22], it is demonstrated that when disturbances, the sampling period, and
are sufficiently small, the closed-loop state will not be able to leave
for the process operated under LEMPC. In this example, however, the controller parameters do not meet these requirements, and therefore the simulations do not allow closed-loop stability to be guaranteed. However, because the guarantees could be obtained with modified selection of control design parameters, we use this type of control design to demonstrate how the cyberattack-resilient design methodology would proceed if
was forward invariant such that it represented the allowable set of states without attacks.
The MPC uses a prediction horizon of
and a sampling period of
h, and is solved using MATLAB’s function fmincon. The explicit Euler numerical integration method with an integration step of
h is used to simulate the process. The process is initialized off of its steady-state condition
,
,
, and
from an initial condition at
kmol/m
and
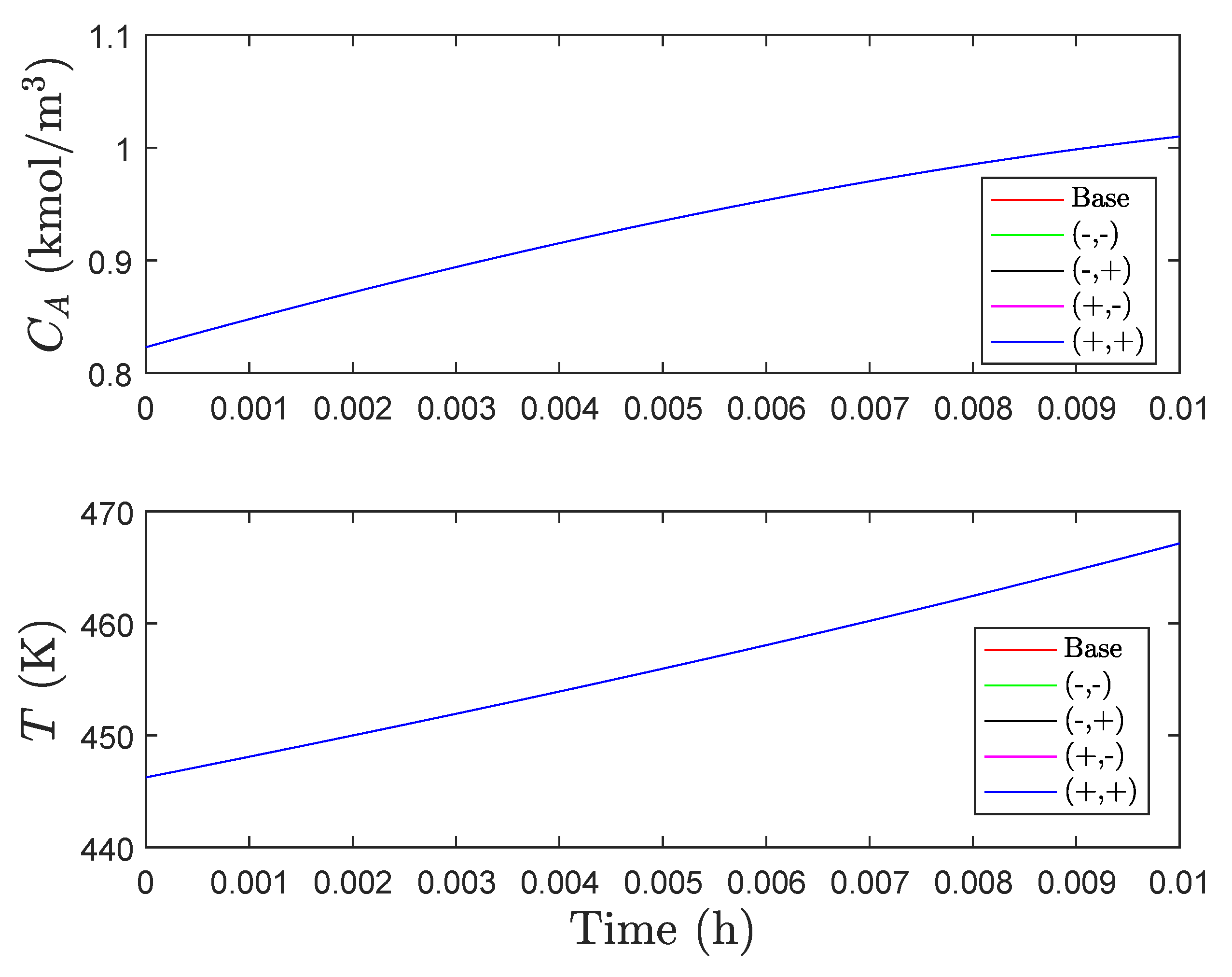
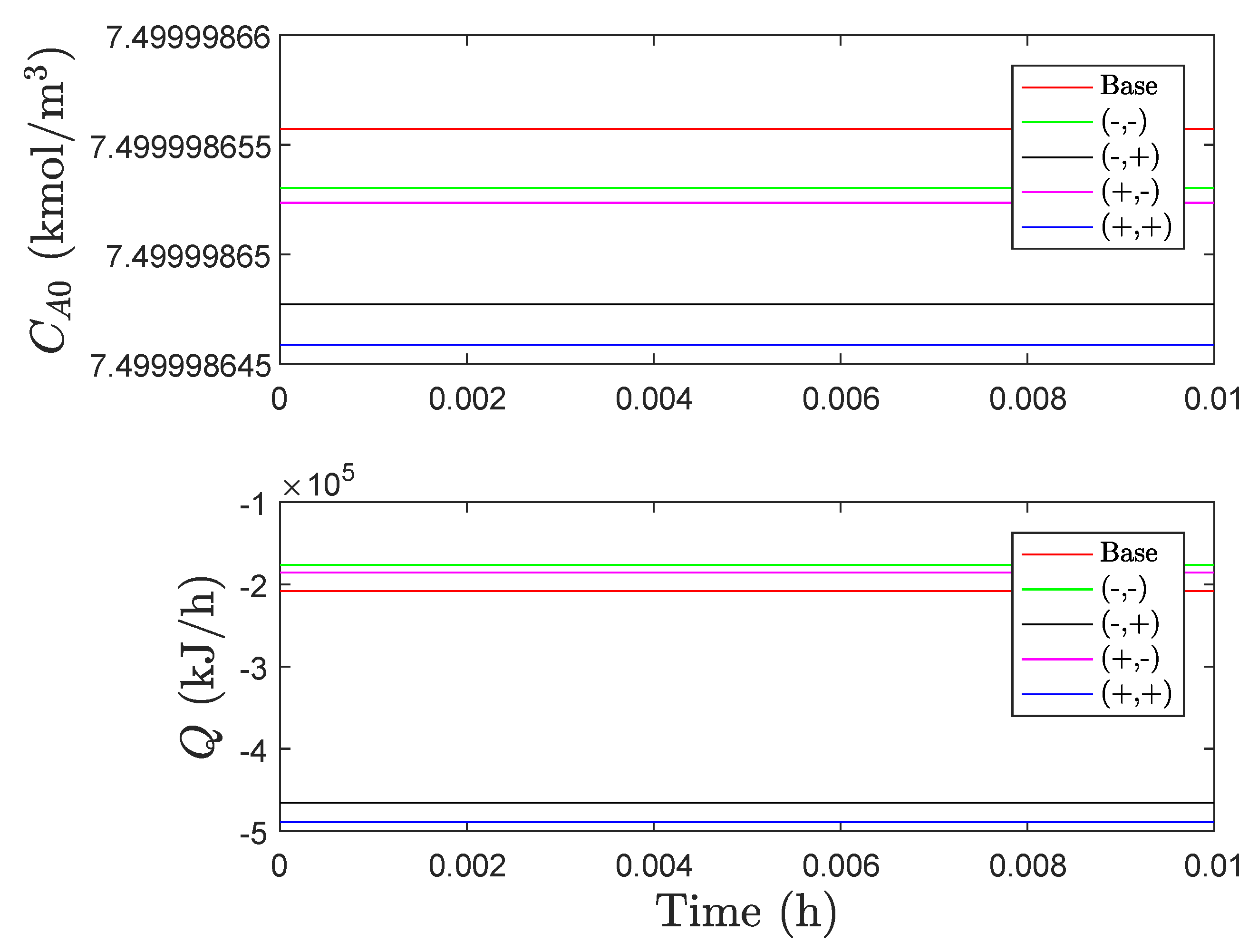
K. When no cyberattack occurs, this controller drives the closed-loop state back to the steady-state. However, when a cyberattack is performed, the temperature of the fluid leaving the CSTR can increase considerably (for example,
Figure 6 shows the trajectory when a false state measurement of
kmol/m
and
K is provided to the MPC at every sampling time for an hour, where the temperature increases by over 400 K above
).
In [
27], it was noted that if
is unusually stiff (e.g.,
N/m), then yielding could occur for the piping when the temperature is about 278 K greater than its steady-state value. This means that if the piping temperature comes to thermal equilibrium with the fluid leaving the pipe at the end of the time period shown in
Figure 6, yielding is possible. In contrast, for a more common (and less stiff) spring constant (e.g.,
N/m [
36]),
would need to be greater than about 39,410 K to cause yielding, which is much greater than the temperature which the piping would be expected to approach according to
Figure 6. Therefore, as long as the CSTR itself can withstand the temperature in
Figure 6, the piping can be considered to be resilient against the attack on the CSTR’s control system.
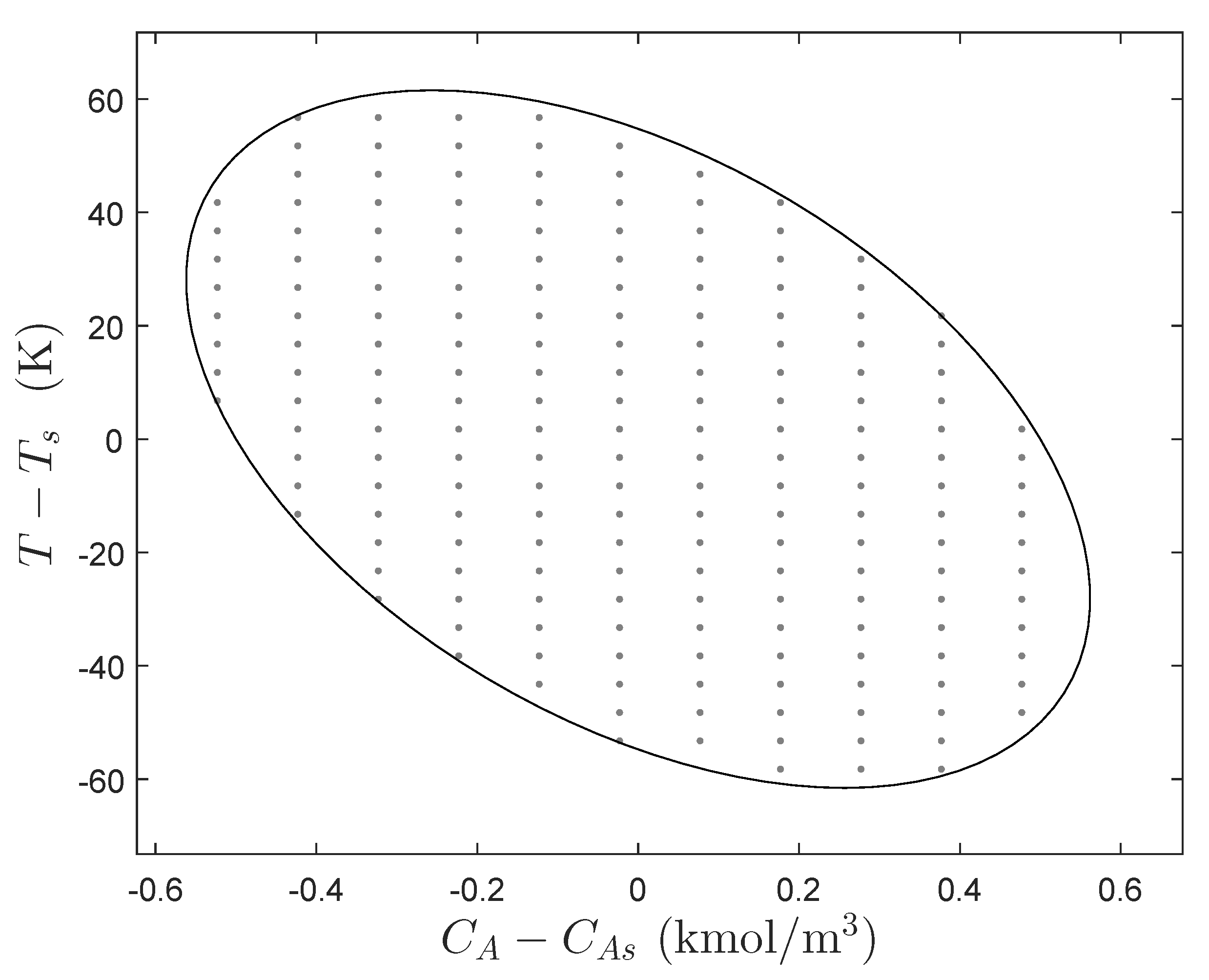
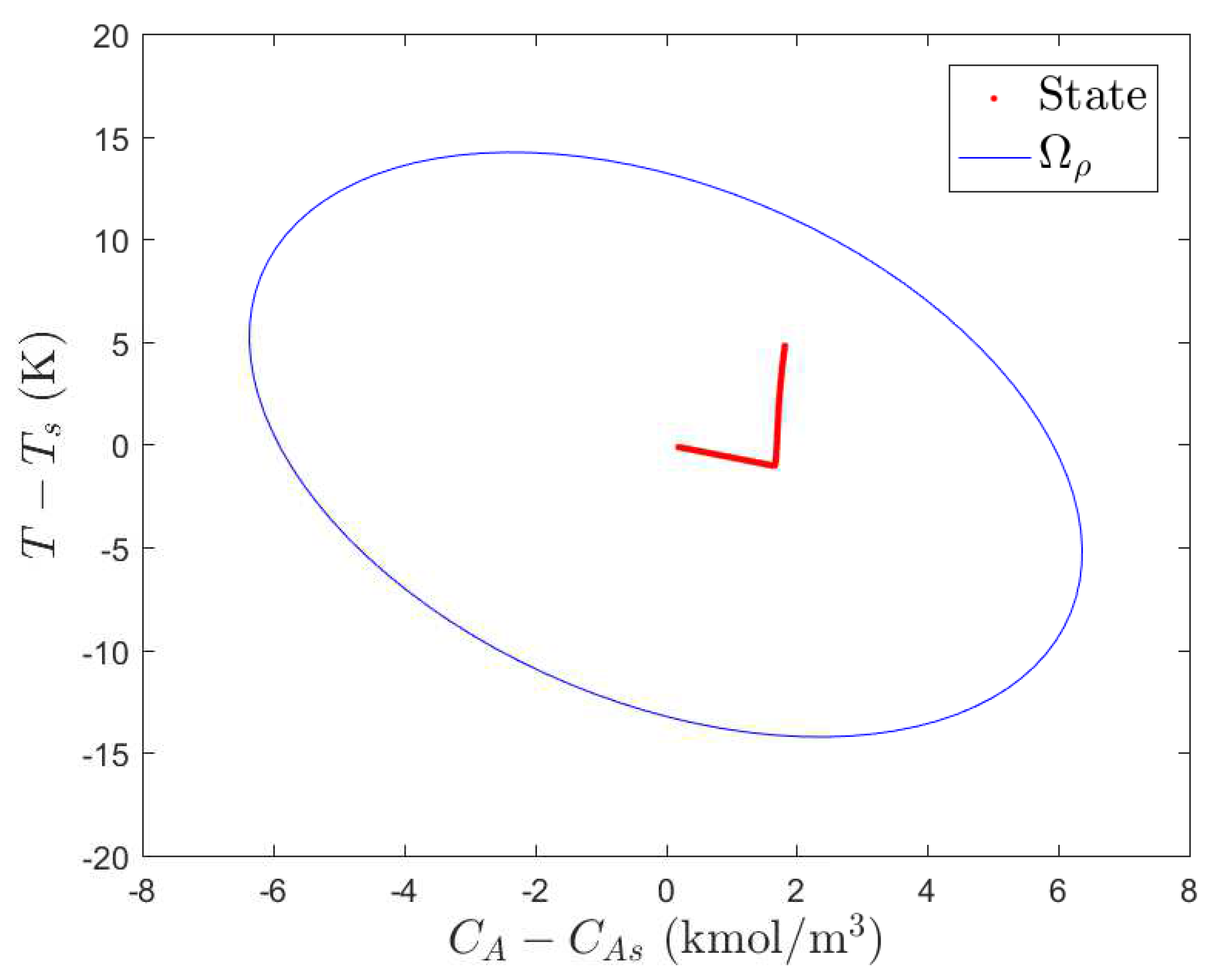
The example above tests one specific initial condition and attack. An exhaustive search technique was suggested above for searching for the worst-case conditions under all attacks. The first step in this search technique was suggested to be characterization of the set of allowable initial conditions, which for LEMPC could be considered to be all the states in the stability region. The state-space can be discretized to identify all of these states for simulation purposes; for the purpose of demonstrating the proposed technique, a relatively coarse discretization (where the points from which the simulation will be carried out are shown in gray in
Figure 7) was performed for this example, though a finer one would give more comprehensive results.
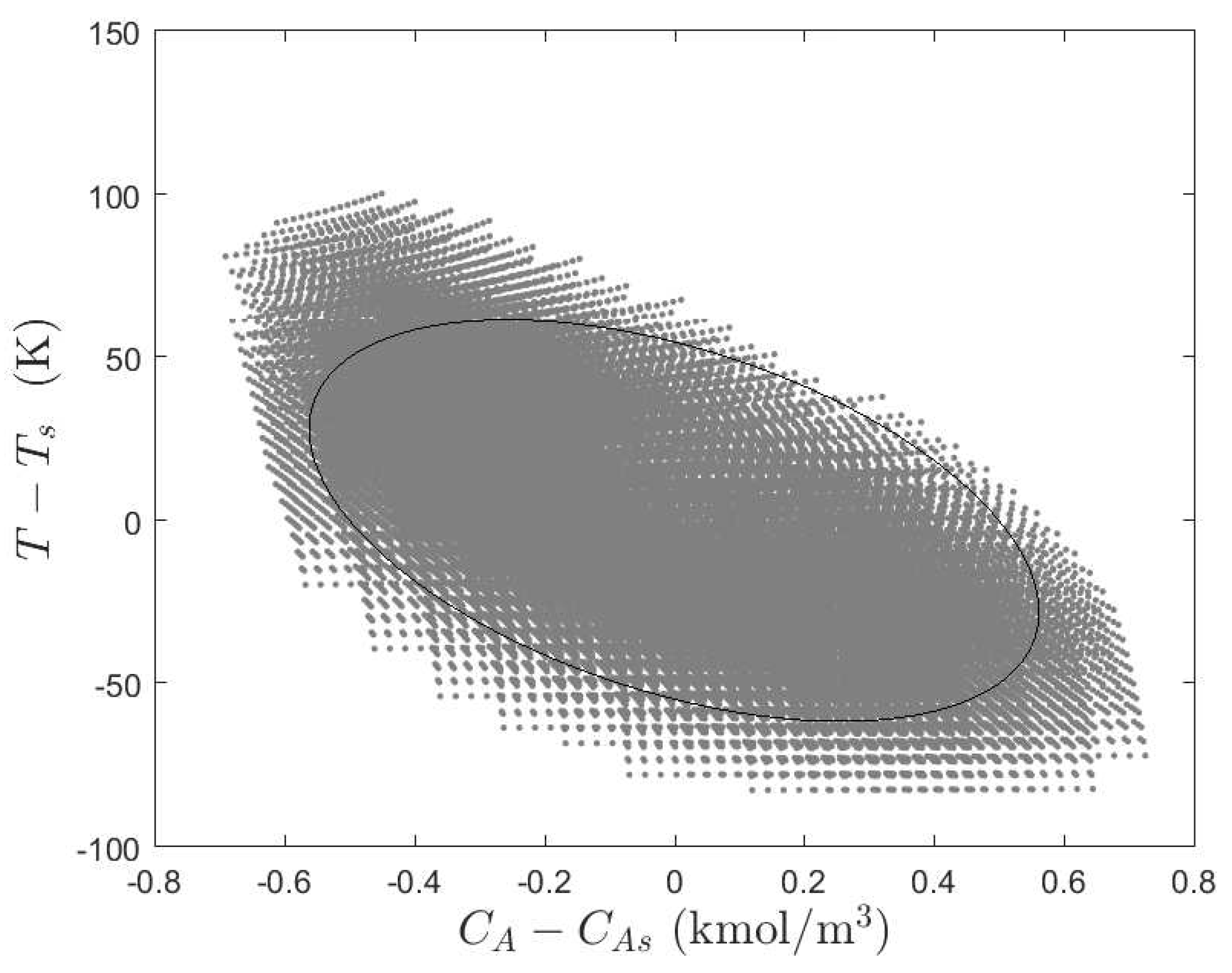
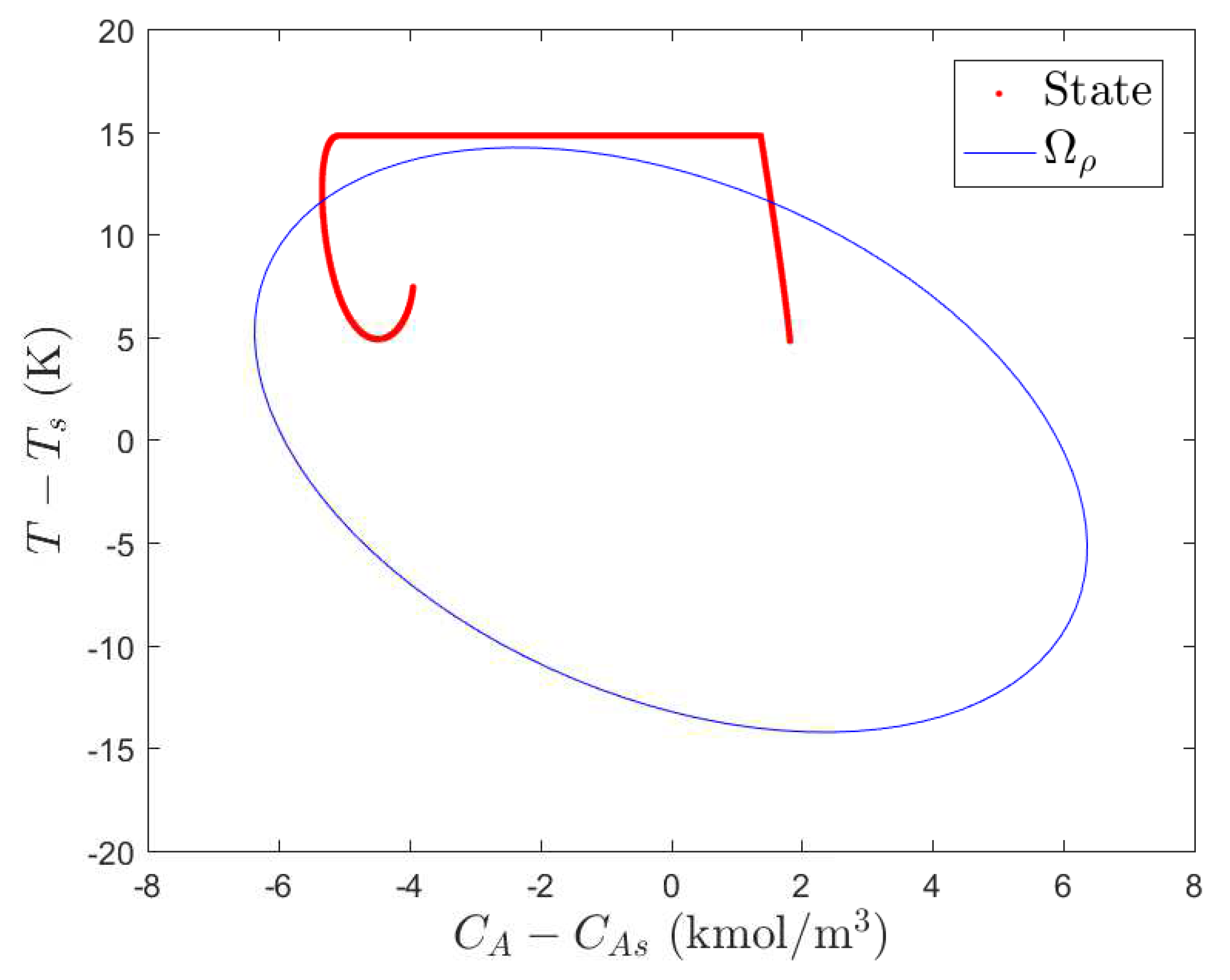
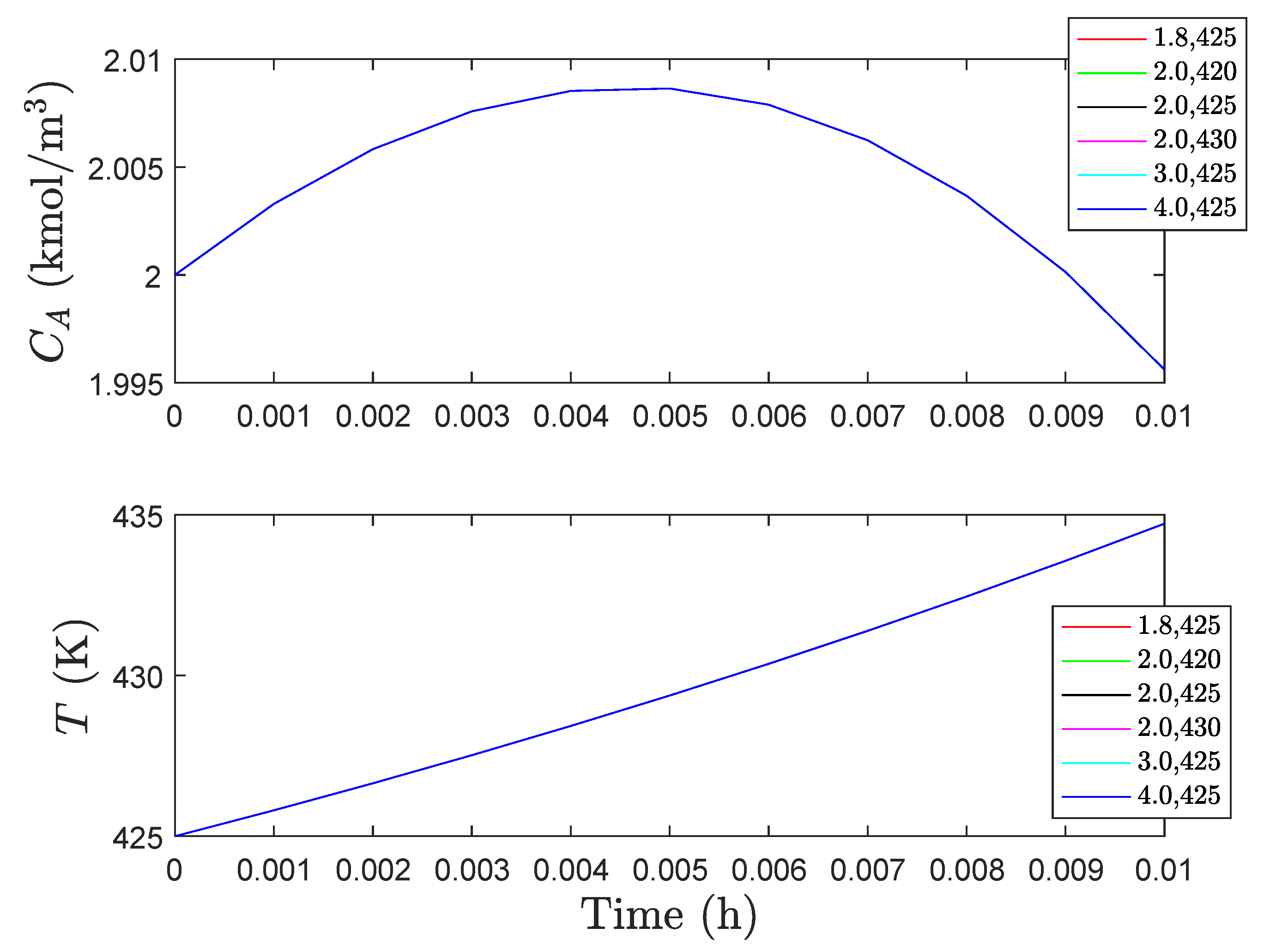
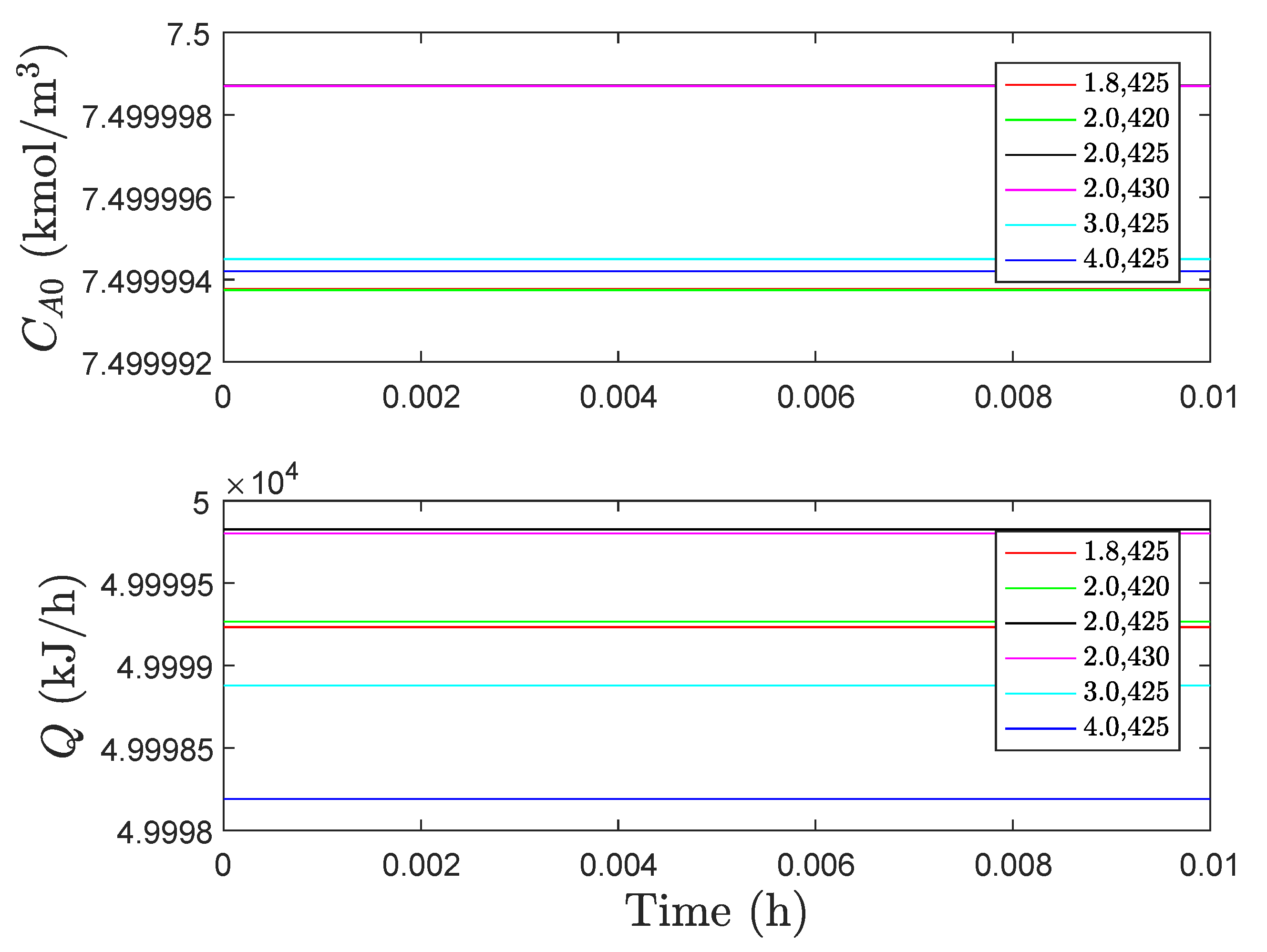
The next step in the proposed procedure is to identify all possible states which could be reached from the set of initial conditions after one sampling period, for any input in the input bounds. For cyberattacks (as well as faults), this represents all possible inputs that could be applied, given any false state measurement or other possible attack. Again using a relatively coarse grid, this can be simulated for this example by finding the final values of the states for
between 0.5 and 7.5 kmol/m
in increments of 0.5 kmol/m
, and for
Q between
and
kJ/h in units of
kJ/h. The plots of the resulting initial conditions at the end of a sampling period are shown in
Figure 8. The grid was too coarse to capture many of the other final conditions; however, despite only capturing some of the possible final conditions which could occur for various initial conditions in
when inputs in the input bounds are applied for a sampling period,
Figure 8 does indicate the concept of the mechanism for checking cyberattack-resilience of a process design. Specifically, after the first sampling period, some of the states under some of the input trajectories are still in
; with a finer grid, these points should already have been tested during the first test to see where they would go next under all inputs. Specifically, because the states over the subsequent sampling period do not depend on past values of the states or inputs (i.e., how the state came to be at its initial condition), any final points at the end of the first sampling period (which would serve as initial points for the considerations in the next sampling period) which are the same as those considered at the beginning of the first do not need to be considered in the second sampling period, because the final conditions at the end of the subsequent sampling period were effectively already evaluated by the end of the first sampling period. However, taking all points outside of
at the end of the first sampling period as initial conditions for the second sampling period and analyzing all possible trajectories which could occur within the input bounds after this occurs could be undertaken.
We here highlight that in an actuator fault involving a valve becoming stuck at a given position, the only possible scenarios after the first sampling period as the state evolves from all possible initial conditions under each possible input value are those which have the same input applied as in the prior sampling period. In contrast, in a cyberattack, the input could take any trajectory in any subsequent sampling period. However, if this more conservative approach to evaluating possible worst-case scenarios is used for both cyberattacks and faults, both can be protected against via process design in an equivalent fashion. This may be a very computationally intensive screening method, however, due to the large number of possible scenarios which would need to be evaluated, despite the ability to prune off those where final states from one sampling period correspond to initial states which were already looked at at a prior sampling time in later sampling periods. It should be noted that the equipment must be resilient against even time-varying types of “faulty” behavior, such as fatigue that might be induced by time-varying profiles of the inputs which observers may not be aware of.
In the example above, the discussion focused on ways of checking that an equipment design is fully cyberattack-resilient through an inherently safe design by designing equipment to withstand the worst-case scenarios that could be encountered from any possible state and for any possible inputs. However, this approach may result in a highly conservative and possibly expensive design. An alternative is to add safety systems. For example, consider the methyl isocyanate (MIC) hydrolysis model from [
38] in which the hydrolysis reaction is assumed to occur in a CSTR according to the following dynamic equations:
where the process parameter values and units corresponding to the mass of the reaction mixture (
m), the pre-exponential constant
, the activation energy
E, the ideal gas constant
R, the flow rate
F through the CSTR, the heat of reaction
, the heat transfer coefficient
U, and the inlet fluid temperature
are noted in
Table 3. The concentration of MIC in the reactor (
, in mol/kg) and the temperature in the reactor (
T, in K) are the states of the process, with the jacket temperature
representing the manipulated input. The steady-state values of these variables (
,
, and
) are also noted in
Table 3.
We consider a control and safety system design similar to that from [
38]. Specifically, an MPC was designed with the objective function
and with the Lyapunov-based stability constraint of Equation (12g) using
for
, and the Lyapunov-based controller designed via Sontag’s control law. The bounds on the input are
K, with
used in fixing the stability region size as in [
38]. The process is simulated under the MPC using an integration step of
s in an MPC and of
s for the process, with
, for 850 s of operation with
s. The process state was initialized at
kmol/m
and
K. Ipopt [
39] was used to perform the simulation with automatic differentiation using ADOL-C [
40]. In addition, a safety system was used in which three actions were taken: (1) the state measurements provided to the LEMPC were used to set the value of the manipulated input to its lower bound when
(these measurements could be falsified by a cyberattacker who could falsify the state measurements to the LEMPC); (2) a physical mechanism opens a valve when the temperature becomes greater than 320 K in the CSTR and leaves it open for the subsequent time until the temperature drops back below 320 K (physically actuated safety valves typically operate based on pressure rather than temperature exceeding a limit, but in this case, we use temperature for a numerical example that demonstrates the concept of the safety system securing a system against cyberattacks). When the safety valve opens, it is assumed that a mass flow rate of water equal to that of the mass flow rate of fluid leaving through the safety valve exits the CSTR; this flow rate
(in kg/m
s) is given by:
The values of
,
,
,
, and
are given in
Table 3, and are set equal to values from [
41] for an Antoine-like equation for methyl isocyanate. The form of Equation (
39) used in this paper was inspired by a safety valve example from [
42], but the safety system design was not rigorously performed for this example. However, the flow rate given by Equation (
39) serves to demonstrate the concept of the use of safety systems in arresting the impacts of a cyberattack, as is demonstrated below, and the lack of a rigorous safety system modeling effort does not detract from the overall conclusion that one could simulate the process and its safety system under various possible cyberattacks to understand worst-case scenarios, or whether the safety system allows the design to be resilient against the attacks. The dynamic equations in the presence of the safety system thus become:
where
m
represents the safety valve area (selected for the purpose of allowing the safety system to combat a cyberattack as will be demonstrated below) and
K is the temperature of the cooling water stream that is injected into the reactor as part of the safety system. The heat capacity of all streams, including the pure water stream, is taken to be
for simplicity; despite a large number of modeling assumptions that are not true physically in this example, it is effective at showing the concept of the safety system preventing the cyberattack success, as discussed below.
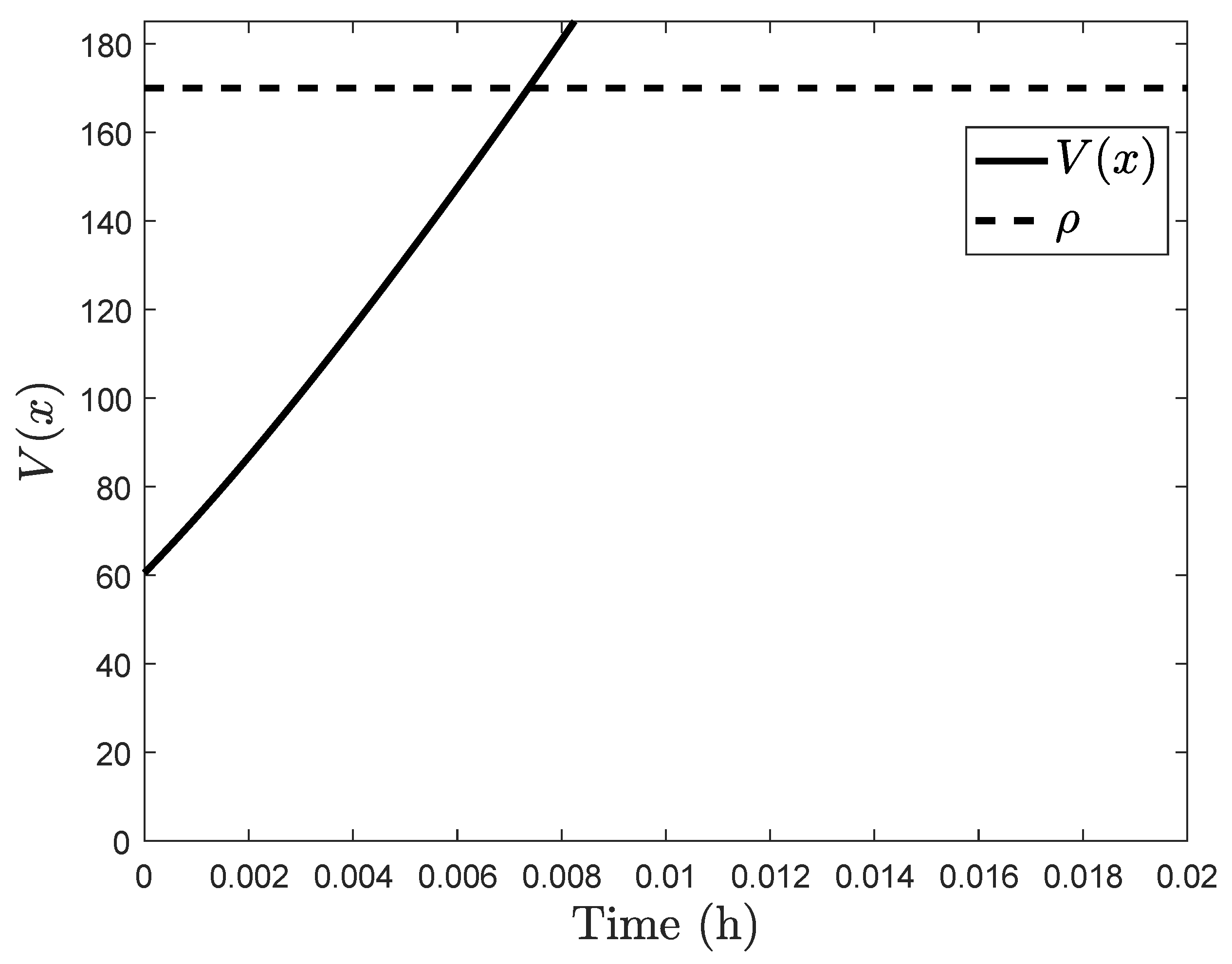
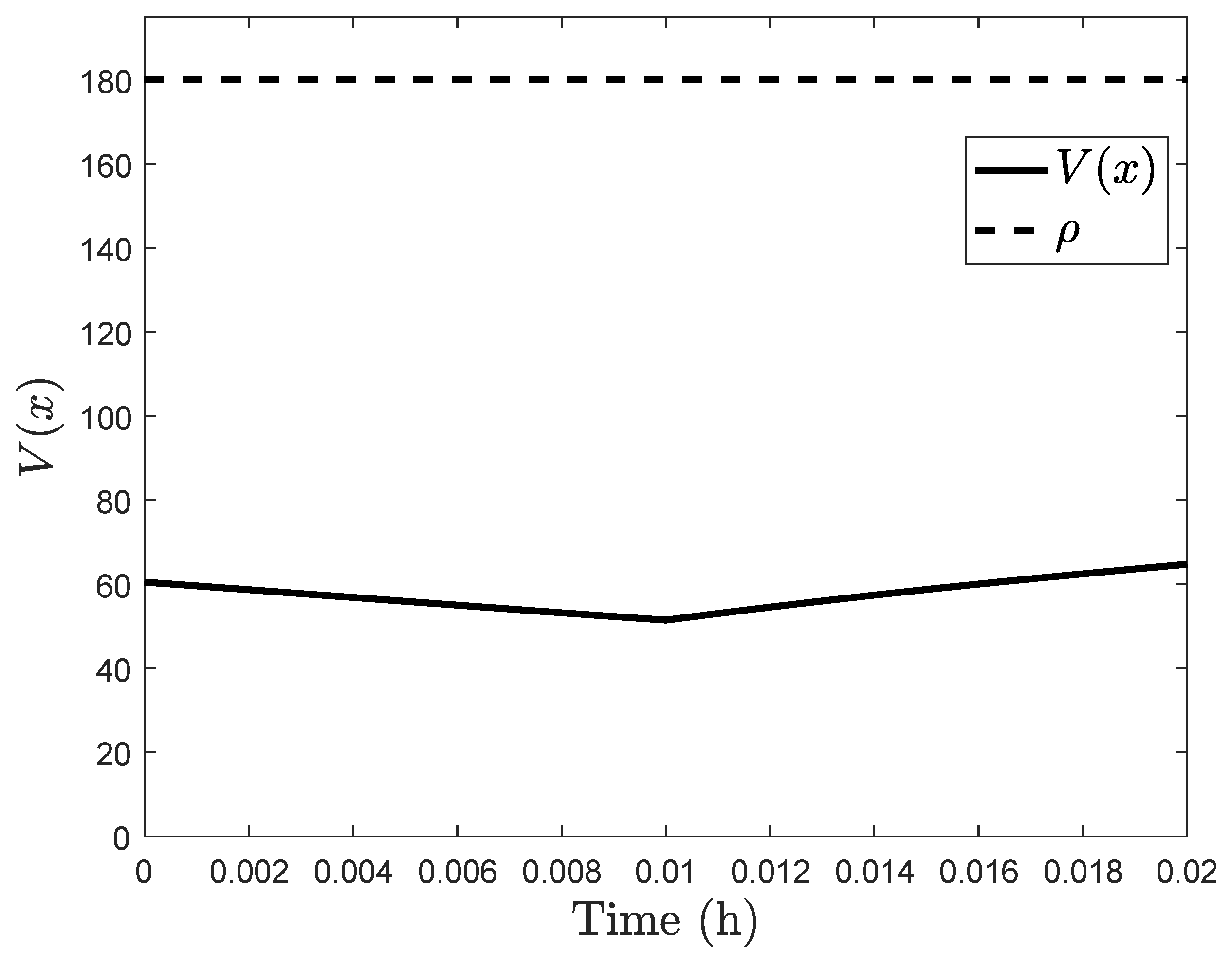
Specifically,
Figure 9 shows the state-space trajectory when the system is controlled by the MPC described above and started from an initial condition off the steady-state (i.e.,
kmol/m
,
K), in the absence of a cyberattack (i.e., accurate state measurements are provided to the MPC at every sampling time). In the presence of an attack involving the false state measurement
kmol/m
,
K provided to the MPC at every sampling time, even though the closed-loop state exits the region
as in
Figure 10 (which shows 300 s of operation), the safety system activates and drives it back into the stability region. If this type of test were performed for all possible initial conditions and inputs in the input bounds (which are all the possible ones which a cyberattacker providing false state measurements or other attacks would be able to cause) in the presence of the safety system to ensure that the safety system is able to prevent any attack from causing an issue, the system including the safety system could be concluded to be cyberattack-resilient as long as the safety system does not fail (even if it would not have been resilient without the safety system activating).
The outcome of the above analysis is that many processes today may find that they already have cyberattack-resilient designs if the initial designs were made fault-tolerant; however, the results above suggest a method by which organizations may evaluate whether this is true for their own designs and better understand the assumptions under which original designs were developed may differ from the assumptions necessary when considering cyberattack-resilience.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}